Изобретение относится к области цифровой вычислительной техники и может быть использовано в автоматических и автоматизированных системах управления объектами с терминальным управлением.
Известен способ контроля и управления динамической системой [1], основанный на трансформации закона распределения управляемого параметра за счет изменения настроечных параметров регулятора. Его эффективное функционирование возможно в случае правильно определенной величины энтропийного коэффициента, что является существенным недостатком.
Наиболее близким по технической сущности к заявленному изобретению является устройство адаптивной системы управления [2]. Однако его использование в условиях шумов не позволяет получить требуемую точность.
Цель изобретения - повысить точность оценивания и снизить вычислительную сложность алгоритма управления маневрирующим объектом. Указанный технический результат достигается за счет устройства управления объектом со свободным выбором поведения, которое содержит следующие блоки: блок хранения констант; первый, второй, третий блоки формирования модуля; блок возведения числа в степень (-1); первый, второй, третий, четвертый, пятый блоки формирования произведения; первый, второй блоки формирования интегрирования; блок формирования отрицательного значения числа; блок формирования производной; блок формирования деления; первый, второй блоки формирования разности; блок формирования знака числа; при этом на вход блока хранения констант, который является входом устройства, поступают значения наблюдаемых величин; первый выход блока хранения констант соединен с входом первого блока формирования модуля, выход первого блока формирования модуля соединен с первым входом первого блока формирования произведения; второй выход блока хранения констант соединен с входом блока возведения числа в степень (-1), выход блока возведения числа в степень (-1) соединен со вторым входом первого блока формирования произведения; второй выход блока хранения констант соединен с входом блока формирования отрицательного значения числа, выход блока формирования отрицательного значения числа соединен с первым входом четвертого блока формирования произведения; третий выход блока хранения констант соединен с входом блока формирования производной, выход блока формирования производной соединен с входом второго блока формирования модуля, выход второго блока формирования модуля соединен с первым входом второго блока формирования произведения, выход второго блока формирования произведения соединен с первым входом блока формирования деления; выход блока формирования производной соединен со вторым входом второго блока формирования произведения; третий выход блока хранения констант соединен с первым входом третьего блока формирования произведения; четвертый выход блока хранения констант соединен со вторым входом третьего блока формирования произведения, выход третьего блока формирования произведения соединен с входом третьего блока формирования модуля, выход третьего блока формирования модуля соединен со вторым входом блока формирования деления, выход блока формирования деления соединен со вторым входом четвертого блока формирования произведения, выход четвертого блока формирования произведения соединен с первым входом второго блока формирования разности; третий выход блока хранения констант соединен с первым входом первого блока формирования разности; пятый выход блока хранения констант соединен со вторым входом первого блока формирования разности, выход блока формирования разности соединен с первым входом пятого блока формирования произведения; шестой выход блока хранения констант соединен со вторым входом пятого блока формирования произведения, выход пятого блока формирования произведения соединен со вторым входом второго блока формирования разности, выход блока формирования разности соединен с входом блока формирования знака числа, выход блока формирования знака числа соединен с третьим входом первого блока формирования произведения, выход блока формирования произведения соединен с входом первого блока формирования интегрирования, выход первого блока формирования интегрирования соединен с входом второго блока формирования интегрирования, который является выходом устройства.
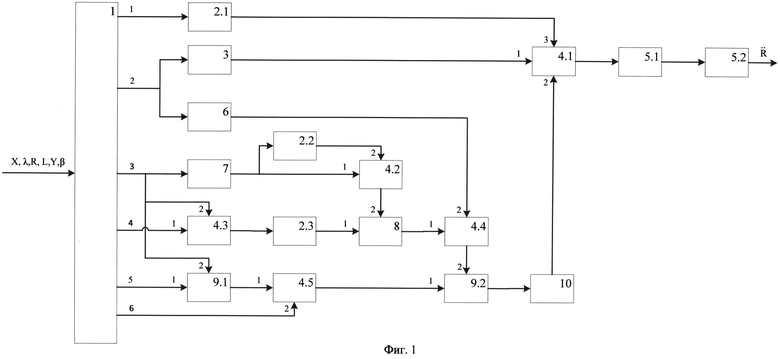
Сущность изобретения поясняется чертежом, где на фиг.1 представлено устройство управления объектом со свободным выбором поведения, которое содержит:
1 - блок хранения констант;
2.1 - первый блок формирования модуля;
2.2 - второй блок формирования модуля;
2.3 - третий блок формирования модуля;
3 - блок возведения числа в степень (-1);
4.1 - первый блок формирования произведения;
4.2 - второй блок формирования произведения;
4.3 - третий блок формирования произведения;
4.4 - четвертый блок формирования произведения;
4.5 - пятый блок формирования произведения;
5.1 - первый блок формирования интегрирования;
5.2 - второй блок формирования интегрирования;
6 - блок формирования отрицательного значения числа;
7 - блок формирования производной;
8 - блок формирования деления;
9.1 - первый блок формирования разности;
9.1 - второй блок формирования разности;
10 - блок формирования знака числа.
Устройство управления объектом со свободным выбором поведения работает следующим образом: на блок 1 хранения констант, который является входом устройства, поступают значения наблюдаемых величин; первый выход блока 1 хранения констант соединен с входом первого блока 2.1 формирования модуля, выход первого блока 2.1 формирования модуля соединен с первым входом первого блока 4.1 формирования произведения; второй выход блока 1 хранения констант соединен с входом блока 3 возведения числа в степень (-1), выход блока 3 возведения числа в степень (-1) соединен со вторым входом первого блока 4.1 формирования произведения; второй выход блока 1 хранения констант соединен с входом блока 6 формирования отрицательного значения числа, выход блока 6 формирования отрицательного значения числа соединен с первым входом четвертого блока 4.4 формирования произведения; третий выход блока 1 хранения констант соединен с входом блока 7 формирования производной, выход блока 7 формирования производной соединен с входом второго блока 2.2 формирования модуля, выход второго блока 2.2 формирования модуля соединен с первым входом второго блока 4.2 формирования произведения, выход второго блока 4.2 формирования произведения соединен с первым входом блока 8 формирования деления; выход блока 7 формирования производной соединен со вторым входом второго блока 4.2 формирования произведения; третий выход блока 1 хранения констант соединен с первым входом третьего блока 4.3 формирования произведения; четвертый выход блока 1 хранения констант соединен со вторым входом третьего блока 4.3 формирования произведения, выход третьего блока 4.3 формирования произведения соединен с входом третьего блока 2.3 формирования модуля, выход третьего блока 2.3 формирования модуля соединен со вторым входом блока 8 формирования деления, выход блока 8 формирования деления соединен со вторым входом четвертого блока 4.4 формирования произведения, выход четвертого блока 4.4 формирования произведения соединен с первым входом второго блока 9.2 формирования разности; третий выход блока 1 хранения констант соединен с первым входом первого блока 9.1 формирования разности; пятый выход блока 1 хранения констант соединен со вторым входом первого блока 9.1 формирования разности, выход блока 9.1 формирования разности соединен с первым входом пятого блока 4.5 формирования произведения; шестой выход блока 1 хранения констант соединен со вторым входом пятого блока 4.5 формирования произведения, выход пятого блока 4.5 формирования произведения соединен со вторым входом второго блока 9.2 формирования разности, выход блока 9.2 формирования разности соединен с входом блока 10 формирования знака числа, выход блока 10 формирования знака числа соединен с третьим входом первого блока 4.1 формирования произведения, выход блока 4.1 формирования произведения соединен с входом первого блока 5.1 формирования интегрирования, выход первого блока 5.1 формирования интегрирования соединен с входом второго блока 5.2 формирования интегрирования, который является выходом устройства.
Заявленное изобретение направлено на повышение эффективности оценивания состояния динамических систем, что весьма важно на всех этапах создания, экспериментальной обработки и эксплуатации объектов ракетно-космической, авиационной, корабельной и других видов техники.
Структура предлагаемого устройства определяется решением задачи сопровождения объекта с терминальным законом управления, основанного на использовании некоторой модели движения, которая в общем случае может быть представлена дифференциальным уравнением первого порядка

где  - вектор состояния,
- вектор состояния,  - переходная функция,
- переходная функция,  - вектор управлений.
- вектор управлений.
Уравнение (1) получают путем приведения к форме Коши дифференциального уравнения Лагранжа второго рода

где  - обобщенные фазовые координаты,
- обобщенные фазовые координаты,  - кинетическая энергия системы,
- кинетическая энергия системы,  - обобщенная сила, соответствующая обобщенной координате.
- обобщенная сила, соответствующая обобщенной координате.
Уравнение (2) является выражением вариационного принципа Гамильтона-Остроградского, согласно которому выполняется равенство нулю элементарного значения [3]

интеграла действия

где  - работа обобщенных сил; а вектор управления выбирается из некоторой допустимой области измеримых и ограниченных управлений
- работа обобщенных сил; а вектор управления выбирается из некоторой допустимой области измеримых и ограниченных управлений 

Уравнение наблюдения имеет вид

где  - известная вектор-функция,
- известная вектор-функция,  - вектор случайных воздействий на канал наблюдения с известной интенсивностью. В пространстве наблюдений введем целевой функционал
- вектор случайных воздействий на канал наблюдения с известной интенсивностью. В пространстве наблюдений введем целевой функционал

где Rξ∈Rn×n - диагональная весовая матрица, характеризующая интенсивность помех в канале наблюдений, т - знак транспонирования.
Имеет место следующая формулировка обратной задачи динамики: определить вектор обобщенных сил  как функцию обобщенных координат и обобщенных скоростей
как функцию обобщенных координат и обобщенных скоростей  и соответствующую ему траекторию
и соответствующую ему траекторию  , обеспечивающие минимум целевого функционала (7) при условии (3) и ограничениях на управление (5).
, обеспечивающие минимум целевого функционала (7) при условии (3) и ограничениях на управление (5).
Решение поставленной задачи (1)-(7) представлено в [4], которое для задачи синтеза фильтра сопровождения маневрирующей цели [5] имеет вид

где X - обобщенная сила, соответствующая Qs в (2);
R - обобщенная координата положения объекта в пространстве;
λ, β - неопределенный множитель Лагранжа;
L - кинетическая энергия.
Устройство работает следующим образом. В исходном состоянии на блок 1 хранения констант поступают значения наблюдаемых величин, значение X первого выхода блока 1 хранения констант поступает на вход первого блока 2.1 формирования модуля |X|, значение |X| выхода первого блока 2.1 формирования модуля поступает на первый вход первого блока 4.1 формирования произведения  ; значение λ, второго выхода блока 1 хранения констант поступает на вход блока 3 возведения числа в степень (-1), значение λ-1 блока 3 возведения числа в степень (-1) поступает на второй вход первого блока 4.1 формирования произведения
; значение λ, второго выхода блока 1 хранения констант поступает на вход блока 3 возведения числа в степень (-1), значение λ-1 блока 3 возведения числа в степень (-1) поступает на второй вход первого блока 4.1 формирования произведения  ; значение λ второго выхода блока 1 хранения констант поступает на вход блока 6 формирования отрицательного значения числа -λ, Значение -λ выхода блока 6 формирования отрицательного значения числа поступает на первый вход четвертого блока 4.4 формирования произведения
; значение λ второго выхода блока 1 хранения констант поступает на вход блока 6 формирования отрицательного значения числа -λ, Значение -λ выхода блока 6 формирования отрицательного значения числа поступает на первый вход четвертого блока 4.4 формирования произведения  ; значение R третьего выхода блока 1 хранения констант поступает на вход блока 7 формирования производной
; значение R третьего выхода блока 1 хранения констант поступает на вход блока 7 формирования производной  , значение выхода блока 7 формирования производной поступает на вход второго блока 2.2 формирования модуля
, значение выхода блока 7 формирования производной поступает на вход второго блока 2.2 формирования модуля  , значение выхода второго блока 2.2 формирования модуля поступает на первый вход второго блока 4.2 формирования произведения
, значение выхода второго блока 2.2 формирования модуля поступает на первый вход второго блока 4.2 формирования произведения  , значение
, значение  выхода второго блока 4.2 формирования произведения поступает на первый вход блока 8 формирования деления
выхода второго блока 4.2 формирования произведения поступает на первый вход блока 8 формирования деления  ; значение
; значение  выхода блока 7 формирования производной поступает на второй вход второго блока 4.2 формирования произведения
выхода блока 7 формирования производной поступает на второй вход второго блока 4.2 формирования произведения  ; значение R третьего выхода блока 1 хранения констант поступает на первый вход третьего блока 4.3 формирования произведения L·R; значение L четвертого выхода блока 1 хранения констант поступает на второй вход третьего блока 4.3 формирования произведения L·R, значение L·R выхода третьего блока 4.3 формирования произведения поступает на вход третьего блока 2.3 формирования модуля |L·R|, значение |L·R| выхода третьего блока 2.3 формирования модуля поступает на второй вход блока 8 формирования деления
; значение R третьего выхода блока 1 хранения констант поступает на первый вход третьего блока 4.3 формирования произведения L·R; значение L четвертого выхода блока 1 хранения констант поступает на второй вход третьего блока 4.3 формирования произведения L·R, значение L·R выхода третьего блока 4.3 формирования произведения поступает на вход третьего блока 2.3 формирования модуля |L·R|, значение |L·R| выхода третьего блока 2.3 формирования модуля поступает на второй вход блока 8 формирования деления  , значение
, значение  выхода блока 8 формирования деления поступает на второй вход четвертого блока 4.4 формирования произведения
выхода блока 8 формирования деления поступает на второй вход четвертого блока 4.4 формирования произведения  , значение выхода четвертого блока 4.4 формирования произведения поступает на первый вход второго блока 9.2 формирования разности
, значение выхода четвертого блока 4.4 формирования произведения поступает на первый вход второго блока 9.2 формирования разности 
 , значение выхода блока 9.2 формирования разности направлено на вход блока 10 формирования знака числа
, значение выхода блока 9.2 формирования разности направлено на вход блока 10 формирования знака числа 
 выхода блока 10 формирования знака числа направлено на третий вход первого блока 4.1 формирования произведения
выхода блока 10 формирования знака числа направлено на третий вход первого блока 4.1 формирования произведения  , значение
, значение  выхода блока 4.1 формирования произведения направлено на вход первого блока 5.1 формирования интегрирования
выхода блока 4.1 формирования произведения направлено на вход первого блока 5.1 формирования интегрирования  , значение
, значение  выхода первого блока 5.1 формирования интегрирования направлено на вход второго блока 5.2 формирования интегрирования
выхода первого блока 5.1 формирования интегрирования направлено на вход второго блока 5.2 формирования интегрирования  .
.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Способ контроля и управления динамической системой. Россия, заявка №2005124236/09 от 29.07.2005. RU 2296356, 2007.
2. Адаптивная система управления. Россия, заявка №4942954/09. RU 2058577, 1996.
3. Справочник по теории автоматического управления. Под ред. A.A. Красовского. М.: Наука, 1987.
4. Костоглотов A.A., Костоглотов А.И., Лазаренко С.В. Объединенный принцип максимума в задачах оценки параметров движения маневрирующего летательного аппарата // Радиотехника и электроника, 2009, №4 (54). С.450-457.
5. Андрашитов Д.С., Залесков A.C. Об актуальности задачи построения модели поведения объекта со свободным выбором поведения // Международный научно-исследовательский журнал, Екатеринбург, 2013. С.98-100.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ЧАСТОТОЙ ВРАЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ ЭЛЕКТРОУСТАНОВОК | 2014 |
|
RU2574334C1 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ЛАГРАНЖЕВЫХ ДИНАМИЧЕСКИХ СИСТЕМ НА ОСНОВЕ ИТЕРАЦИОННОЙ РЕГУЛЯРИЗАЦИИ | 2013 |
|
RU2528133C1 |
| Устройство оценки параметров с использованием априорной информации в форме интеграла действия | 2016 |
|
RU2657477C1 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ ДИНАМИЧЕСКИХ СИСТЕМ НА ОСНОВЕ ВАРИАЦИОННЫХ ПРИНЦИПОВ | 2011 |
|
RU2464615C1 |
| Устройство идентификации параметров акселерометра | 2014 |
|
RU2628279C2 |
| Устройство оценки состояния и идентификации параметров моделей динамических систем | 2016 |
|
RU2653939C1 |
| Устройство управления автоматическими системами при структурной неопределенности | 2018 |
|
RU2697728C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ БОРТОВЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПО РЕЗУЛЬТАТАМ ОЦЕНКИ ПАРАМЕТРОВ | 2013 |
|
RU2544765C1 |
| Устройство оценки параметров возмущенных процессов с использованием максимума обобщенной мощности | 2019 |
|
RU2713875C1 |
| Устройство идентификации параметров динамических звеньев информационно-управляющих систем | 2014 |
|
RU2632681C2 |
Изобретение относится к области цифровой вычислительной техники и может быть использовано в автоматических и автоматизированных системах управления объектами с терминальным управлением. Технический результат - повышение точности оценивания и снижение вычислительной сложности алгоритма управления маневрирующим объектом. Указанный технический результат достигается за счет устройства управления объектом со свободным выбором поведения, которое содержит следующие блоки: блок хранения констант; первый, второй, третий блоки формирования модуля; блок возведения числа в степень (-1); первый, второй, третий, четвертый, пятый блоки формирования произведения; первый, второй блок формирования интегрирования; блок формирования отрицательного значения числа; блок формирования производной; блок формирования деления; первый, второй блоки формирования разности; блок формирования знака числа. Указанный технический результат достигается за счет постановки задачи в форме оптимизационной и ее решение без использования инвариантного погружения. 1 ил.
Устройство управления объектом со свободным выбором поведения содержит следующие блоки: блок хранения констант; первый, второй, третий блоки формирования модуля; блок возведения числа в степень (-1); первый, второй, третий, четвертый, пятый блоки формирования произведения; первый, второй блоки формирования интегрирования; блок формирования отрицательного значения числа; блок формирования производной; блок формирования деления; первый, второй блоки формирования разности; блок формирования знака числа; при этом на вход блока хранения констант, который является входом устройства, поступают значения наблюдаемых величин; первый выход блока хранения констант соединен с входом первого блока формирования модуля, выход первого блока формирования модуля соединен с первым входом первого блока формирования произведения; второй выход блока хранения констант соединен с входом блока возведения числа в степень (-1), выход блока возведения числа в степень (-1) соединен со вторым входом первого блока формирования произведения; второй выход блока хранения констант соединен с входом блока формирования отрицательного значения числа, выход блока формирования отрицательного значения числа соединен с первым входом четвертого блока формирования произведения; третий выход блока хранения констант соединен с входом блока формирования производной, выход блока формирования производной соединен с входом второго блока формирования модуля, выход второго блока формирования модуля соединен с первым входом второго блока формирования произведения, выход второго блока формирования произведения соединен с первым входом блока формирования деления; выход блока формирования производной соединен со вторым входом второго блока формирования произведения; третий выход блока хранения констант соединен с первым входом третьего блока формирования произведения; четвертый выход блока хранения констант соединен со вторым входом третьего блока формирования произведения, выход третьего блока формирования произведения соединен с входом третьего блока формирования модуля, выход третьего блока формирования модуля соединен со вторым входом блока формирования деления, выход блока формирования деления соединен со вторым входом четвертого блока формирования произведения, выход четвертого блока формирования произведения соединен с первым входом второго блока формирования разности; третий выход блока хранения констант соединен с первым входом первого блока формирования разности; пятый выход блока хранения констант соединен со вторым входом первого блока формирования разности, выход блока формирования разности соединен с первым входом пятого блока формирования произведения; шестой выход блока хранения констант соединен со вторым входом пятого блока формирования произведения, выход пятого блока формирования произведения соединен со вторым входом второго блока формирования разности, выход блока формирования разности соединен с входом блока формирования знака числа, выход блока формирования знака числа соединен с третьим входом первого блока формирования произведения, выход блока формирования произведения соединен с входом первого блока формирования интегрирования, выход первого блока формирования интегрирования соединен с входом второго блока формирования интегрирования, который является выходом устройства.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1991 |
|
RU2039371C1 |
| RU 2058577 C1, 20.04.1996 | |||
| US 6556980 B1, 29.04.2003 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

