Изобретение относится к электромеханике, а точнее к электродинамическим элементам, предназначенным для преобразования электрической энергии в механическую. Такого рода приводы могут быть использованы в робототехнике, преимущественно в исполнительных системах манипулятора.
Известен электродинамический привод (Авторское свидетельство СССР №1301687, опубл. 07.13.87, бюл. №13, заявка №3963786/31-08 от 13.08.85), выполненный на основе спирально-пространственного электродинамического элемента, содержащий подвижную часть в виде двух гибких изолированных проводников, одни концы которого закреплены на основании, а другие соединены между собой и размещены на подвижной пластине, при этом гибкие изолированные проводники скручены, а их концы подключены к источнику питания.
Недостатком элемента является малое усилие вращательного движения.
Этот недостаток устранен в приводе линейного перемещения (Авторское свидетельство СССР №1386442, опубл. 07.04.88, бюл. №13, заявка №3987773/31-08 от 09.12.85), который снабжен дополнительными токопроводящими петлями, образующими вместе с основной петлей две группы спиралей, расположенных одна против другой, а также дополнительной обоймой, двумя штоками, закрепленными на этих обоймах, и стержнями, при этом концы спиралей каждой группы закреплены на соответствующей обойме, а другие их концы расположены один против другого, соединены между собой стержнями.
Недостатком данного устройства является сложность конструкторского исполнения, которая обусловлена необходимостью строгого соблюдения линейного размера спирали для обеспечения равномерной нагрузки.
Наиболее близким к заявленному по совокупности существенных признаков является привод линейного перемещения (Авторское свидетельство СССР №2211523, опубл. 27.08.2003, бюл. №24, заявка 2001106420/09 от 06.03.2001), содержащий расположенный в корпусе основной спирально-пространственный активный элемент, выполненный в виде двух скрученных между собой изолированных проводов, одни концы которых связаны с источником электрической энергии, а другие соединены между собой и связаны с выходным штоком, отличающийся тем, что привод дополнительно снабжен С-образными магнитопроводами, расположенными в ряд в одной плоскости, и дополнительным спирально-пространственным активным элементом, витки которого последовательно охватывают торцы С-образных магнитопроводов, возбуждая в них магнитное поле, обеспечивающие чередование их полярности, а витки основного спирально-пространственного активного элемента расположены в зоне торцов С-образных магнитопроводов, причем каждый виток основного спирально-пространственного активного элемента соединен с помощью растяжки с корпусом, а выходной шток присоединен к крайнему витку основного спирально-пространственного активного элемента.
Недостатком данного прототипа является низкое усилие, которое обусловлено электромагнитными показателями, а также низкий срок службы из-за изгибного износа проводников.
Изобретение направлено на повышение усилия и улучшение эксплуатационных характеристик.
Это достигается тем, что в приводе линейного перемещения, содержащем элемент, выполненный в виде петли из изолированного провода, концы которой связаны с источником электрической энергии и с выходным и входным штоками, согласно изобретению каждая из двух ветвей петли выполнена в виде двух жестких проводящих шин, которые соединены между собой с помощью подшипников, а концы этих шин соединены с входным и выходным штоками.
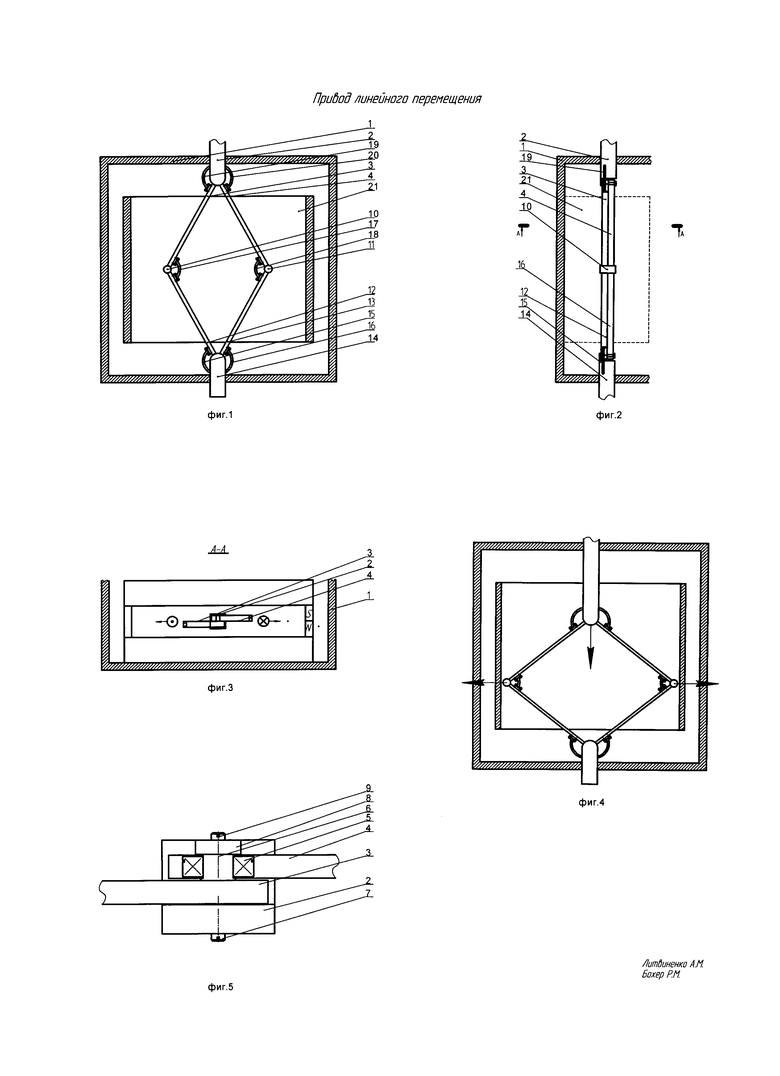
Изобретение иллюстрируется чертежами, где на фиг. 1 показан привод линейного перемещения в исходном состоянии вид спереди в разрезе. Вид в разрезе сбоку показан на фиг. 2. Поперечный разрез изображен на фиг. 3. Рабочее состояние показано на фиг. 4. Подробная конструкция соединения штока с шинами изображена на фиг. 5.
Привод линейного перемещения содержит корпус 1, выходной шток 2, который соединен с первой шиной 3 и второй шиной 4 (см. фиг. 5). Подшипник 5, закрепленный на шине 3, установлен на шпильке 6, которая в свою очередь с одного конца крепится к штоку 2 с помощью винта 7, а с другого конца устанавливается крышка 8 и закрепляется посредством винта 9. Таким же образом соединена шина 4 со штоком 2. Противоположные концы этих шин с помощью подшипников 10 и 11 соединены соответственно с шинами 12 и 13, другие концы которых установлены в штоке 14. Таким образом, каждая из двух ветвей петли выполнена из жестких проводящих шин: первая ветвь - шины 3 и 4, вторая ветвь - шины 12 и 13. Нижние концы шин 12 и 13 также установлены с помощью подшипников и снабжены гибкими проводами 15 и 16. Шины 3, 4, 12 и 13 соединены электрически с помощью гибких проводов 15, 16, 17, 18, 19, 20 (см. фиг. 1).
Привод линейного перемещения работает следующим образом. При подаче напряжения на гибкий провод 15 ток протекает (условно) по цепи: гибкий провод 15, шина 12, гибкий провод 17, шина 3, гибкий провод 19, гибкий провод 20, шина 4, гибкий провод 18, шина 13, гибкий провод 16.
Поскольку эта цепь находится в магнитном поле, которое формирует постоянный магнит 21 и действует на шины, показанные на чертеже (см. фиг. 3), то направление перемещения шин будет противоположно, так как направление токов в ветвях цепи также противоположно. Складывающаяся ромбообразная силовая схема обеспечивает перемещение штока 2 вниз. При этом положение основного элемента показано на фиг. 4.
Введение жестких проводящих шин, концы которых соединены с помощью подшипников, обеспечивает повышение усилий и срока службы, а следовательно, повышает производительность и уменьшает удельные затраты на устройство.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2014 |
|
RU2592070C2 |
| Привод линейного перемещения | 2015 |
|
RU2673880C2 |
| ПРИВОД ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2001 |
|
RU2211523C2 |
| Электродинамический элемент | 1983 |
|
SU1092673A1 |
| ПРИВОД ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ (3 ВАРИАНТА) | 2022 |
|
RU2784028C1 |
| Робот промышленный | 2014 |
|
RU2634392C2 |
| Привод линейного перемещения | 1984 |
|
SU1283082A1 |
| МНОГОЛУЧЕВОЙ РЕГЕНЕРАТИВНЫЙ УСИЛИТЕЛЬ ЭЛЕКТРОМАГНИТНЫХ КОЛЕБАНИЙ | 1999 |
|
RU2150766C1 |
| Измерительный механизм электромеханического прибора | 1985 |
|
SU1322154A1 |
| АВТОМАТИЧЕСКИЙ ВЫКЛЮЧАТЕЛЬ | 1993 |
|
RU2115191C1 |
Изобретение относится к электротехнике, к электродинамическим элементам, предназначенным для преобразования электрической энергии в механическую, и может быть использовано в робототехнике, преимущественно в исполнительных системах манипулятора. Технический результат состоит в повышении усилия и улучшении эксплуатационных характеристик. Привод линейного перемещения содержит элемент, выполненный в виде петли из изолированного провода, концы которой связаны с источником электрической энергии и с выходным и входным штоками. Каждая из двух ветвей петли выполнена в виде двух жестких проводящих шин, которые соединены между собой с помощью подшипников. Концы этих шин соединены с входным и выходным штоками. За счет введения жестких проводящих шин, соединенных между собой с помощью подшипников, повышается усилие и срок службы, что повышает производительность и уменьшает удельные затраты. 5 ил.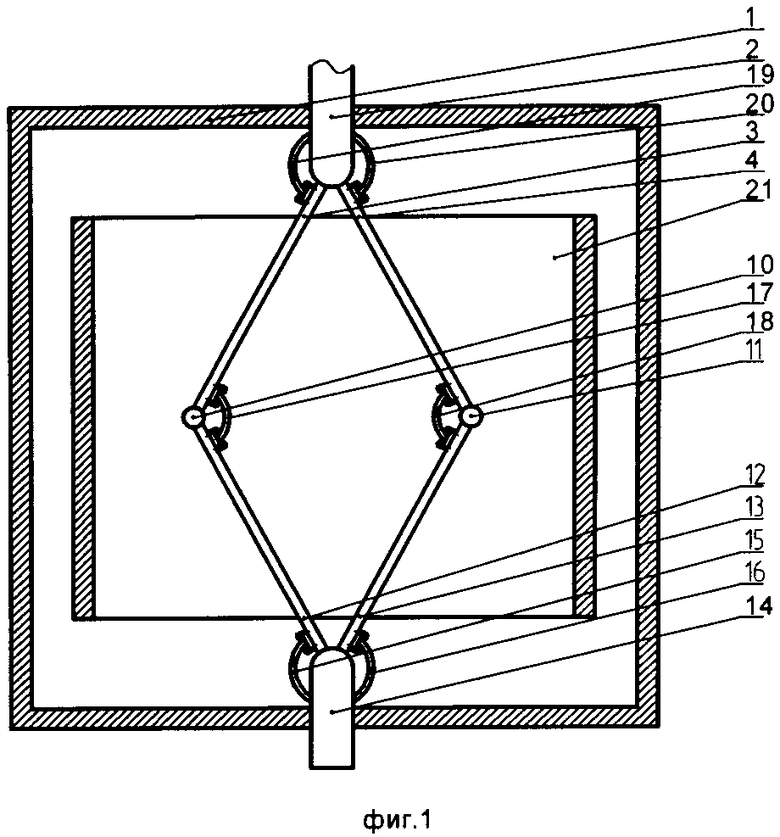
Привод линейного перемещения, содержащий элемент, выполненный в виде петли из двух ветвей изолированного провода, концы которых связаны с источником электрической энергии и с выходным и входным штоками, отличающийся тем, что каждая из двух ветвей петли выполнена в виде двух жестких проводящих шин, которые соединены между собой с помощью подшипников, а концы этих шин соединены с входным и выходным штоками.
| ПРИВОД ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2001 |
|
RU2211523C2 |
| Привод линейного перемещения | 1985 |
|
SU1386442A1 |
| Привод линейного перемещения | 1984 |
|
SU1283082A1 |
| Электродинамический привод | 1985 |
|
SU1301687A1 |
| Электродинамический элемент | 1983 |
|
SU1092673A1 |
| Электродвигатель возвратно- поступательного движения | 1979 |
|
SU788293A1 |
| Электродвигатель возвратно-поступательногодВижЕНия | 1980 |
|
SU853750A1 |
| DE 10224475 A1, 15.01.2004. | |||

