Изобретение относится к робототехнике, а именно к приводам роботов и манипуляторов.
Цель изобретения - улуч1иение массо- габаритных показателей привода.
На фиг. 1 изображен привод, общий вид; - на фиг. 2 - стержень с элементами крепления; на фиг. 3 - схема кручения стержней.
Электродинамический привод содержит две группы токопроводящих петель, ветви ю которых скручены между собой по спиралям 1 и связаны с источником электрической энергии (не показан). При этом спирали одной группы расположены напротив спиралей другой группы закреплены одним концом в
этом штоки 3 движутся во встречных направлениях.
Если упругость материала, из которого выполнены петли, недостаточна, то устройство может быть снабжено планками, между которыми располагаются стержни 4 (фиг. 3). При этом планки подпружинены в продольном направлении.
Формула изобретения
Электродинамический привод преимущественно для манипуляторов, содержащий основную токопроводяп1ую петлю, связанную с источником электрической энергии, ветви которой скручены между собой но спикоицы спиралей стержнями 4.
соединены между собой.
обоймах 2, снабженных П1токами 3, а другие рали, закрепленной одним концом в основной обойме, отличающийся тем, и.то, с целью улучщения массогабаритных показателей привода, он снабжен дополпительными то- копроводящими петлями, образуюии1ми вместе с основной петлей две группы спиралей, расположенных друг против друга, а также дополнительной о(5оймой, двумя 1птоками, закрепленными на этих обоймах, и стержнями, при этом одни концы спиралей каждой группы закреплены на соответствующей
Привод работает следующим образом.
При подаче постоянного тока в закрученные петли происходит их раскручивание под действием электродинамических сил, в результате чего длина спиралей 1 увеличивается и штоки 3 вместе с обоймами 2 расходятся. После отключения тока под действием сил упругости материала, из кото- 25 обойме, а другие их концы, расположенные рого выполнены витки, происходит их скру-друг против друга, сосдипены между собой
чивание и уменьщение длин спиралей, при стержнями.
этом штоки 3 движутся во встречных направлениях.
Если упругость материала, из которого выполнены петли, недостаточна, то устройство может быть снабжено планками, между которыми располагаются стержни 4 (фиг. 3). При этом планки подпружинены в продольном направлении.
Формула изобретения
Электродинамический привод преимущественно для манипуляторов, содержащий основную токопроводяп1ую петлю, связанную с источником электрической энергии, ветви которой скручены между собой но спирали, закрепленной одним концом в основной обойме, отличающийся тем, и.то, с целью улучщения массогабаритных показателей привода, он снабжен дополпительными то- копроводящими петлями, образуюии1ми вместе с основной петлей две группы спиралей, расположенных друг против друга, а также дополнительной о(5оймой, двумя 1птоками, закрепленными на этих обоймах, и стержнями, при этом одни концы спиралей каждой группы закреплены на соответствующей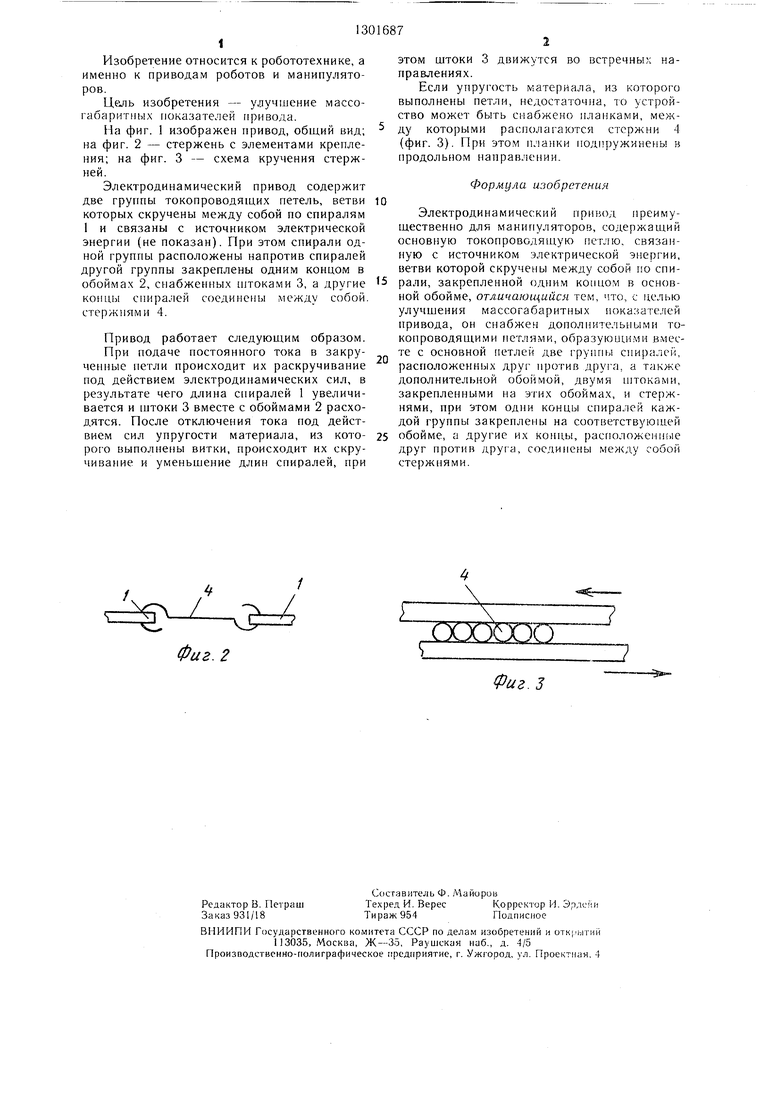
| название | год | авторы | номер документа |
|---|---|---|---|
| Электродинамический привод | 1985 |
|
SU1303397A1 |
| Привод линейного перемещения | 2015 |
|
RU2673880C2 |
| ПРИВОД ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2001 |
|
RU2211523C2 |
| ПРИВОД ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2014 |
|
RU2592070C2 |
| Привод линейного перемещения | 2014 |
|
RU2613670C2 |
| Привод линейного перемещения | 1985 |
|
SU1386442A1 |
| МАНИПУЛЯТОР | 2003 |
|
RU2247648C1 |
| Рука манипулятора | 1986 |
|
SU1333564A1 |
| РАЗОВЫЙ ДВУХПЕТЛЕВОЙ СТРОП | 1998 |
|
RU2154598C2 |
| Устройство для подачи мерного материала в зону обработки | 1986 |
|
SU1379373A1 |
Илооретенис относится к робототехнике, а именно к приводам роботов и ма|1ипу. ятор01 Целью ii;)6peTCniiH яп.;1яетси улучшение массогабаритных показателей привода. При нодяче постоянного тока и закрученные нет.ми снира. n.,.:un их |iac- кручивание нол aeiieTiiue%i :. екг|1оди 1а% н- ческих си,м, и ре.амьтап Mei o .ч. ншг сннра- ли I увеличивается, а штсжи 3 вместе с (Обоймами 2 расходятся. После огключения тока под действием CH, I упругости , ич которого . 1иены снирали. н| оисходиг их ( кручивание и меньн1ение д.тины, нри утом пггоки 3 1Ю встречных направлениях. 3 и. |. 2. / I (иязй О iOO I-.I
Фиг. 2
1ХЙШ
S
Фиг.
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
