Область техники, к которой относится изобретение
Изобретение касается устройства для техники автоматизации, состоящего из сервопривода и модуля для ручного управления сервоприводом, причем в качестве приводного элемента для сервопривода предусмотрен электрический привод или электрогидравлический привод.
Уровень техники
Электрические сервоприводы применяются в технике автоматизации для управления и/или регулирования арматурой. Когда упоминается термин «арматура», речь идет преимущественно об органе управления, например, клапане, задвижке, дросселе или заслонке. В зависимости от органа управления управление, т.е. процесс установки, заключается во вращающем, сдвигающем или поворотном движении.
Электрические сервоприводы для арматуры должны быть рассчитаны таким образом, чтобы они могли передавать большие вращающие моменты (30-500.000 Нм) при малой частоте вращения (4-180 об/мин), причем переданный вращающий момент при малом угле вращения должен быть постоянным. Для известных сервоприводов передача вращающего момента между электрическим двигателем и арматурой выполняется через понижающий редуктор, который, в зависимости от случая применения, может иметь различные исполнения. Понижающий редуктор иногда необходим для того, чтобы привести высокую частоту вращения электрического двигателя в требуемую, в большой мере, постоянную выходную частоту вращения, необходимую для управления арматурой. В качестве понижающего редуктора может применяться редуктор любого соответствующего типа. Например, можно назвать конический и цилиндрический редуктор, червячный редуктор, совмещенный редуктор или рычажную передачу. Заявителем предлагаются сервоприводы, которые соответствуют различным требованиям. Так, вращающий момент для приводов вращения достигает значений 32.000 Нм; при поворотных приводах можно реализовать вращающие моменты до 500.000 Нм.
Далее, в качестве примера описывается принцип конструкции известного сервопривода: для понижения частоты вращения электрического двигателя в выходную частоту вращения, с помощью которой арматура управляется, используется вместе с планетарной передачей червячная передача с червячным валом, шнеком и червячным колесом. Для того чтобы во время останова электрического двигателя червячный редуктор оставался в требуемом нерабочем положении, червячный редуктор оснащается устройством автоматического торможения. Червячный вал и полый ведомый вал с червячным колесом обычно катаются в шарикоподшипниках, т.е. подшипниках скольжения, работающих без смазки.
Червяк располагается с возможностью сдвига между двумя пакетами с калиброванной пружиной на червячном валу, так, что при передаче вращающего момента червяк испытывает поступательное движение относительно червячного вала. Величина этого сдвига, которая соответствует переданному вращающему моменту, передается дальше на блок управления. Пространство редуктора само заполнено смазочным веществом, так что при эксплуатации подшипника не требуется его техническое обслуживание в течение продолжительного времени.
В зависимости от типа конструкции арматуры привод вращения должен отключаться в конечных положениях в зависимости от хода и вращающего момента. Для этого в блоке управления обычно предусматриваются две независимые системы измерения, а именно, схемы измерения хода и вращающего момента, которые измеряют перемещение, т.е. вращающий момент, приложенный к ведомому валу. При достижении требуемого конечного положения, или позиции, через выключатель в систему управления передается сигнал, с помощью которого электрический двигатель выключается.
Для того чтобы выполнить установленный в технике автоматизации стандарт безопасности, в случае аварии необходимо управлять сервоприводом через отдельно управляемый регулятор. Кроме того, этот регулятор используется также, например, при вводе в эксплуатацию сервопривода. Под регулятором обычно понимается маховик, который управляется обслуживающим персоналом, чтобы привести арматуру в необходимое положение. Кроме того, под регулятором может пониматься рукоятка или прочий рычажный механизм, например, стопорный механизм.
Для разделения ручного режима и автоматического режима предусмотрен сцепной механизм. Сцепной механизм обычно выполнен и/или расположен таким образом, что ротор в автоматическом режиме непосредственно соединяется с ведомым валом, и регулятор отсоединяется, в то время, как в ручном режиме, т.е. при ручном управлении, ведомый вал соединяется с регулятором, и ротор отсоединяется. Тем самым достигается разделение ручного и автоматического режимов. Сцепной механизм предпочтительно выполнен таким образом, что регулятор автоматически отсоединяется от вала ротора, как только сервопривод включается в автоматический режим: таким образом, автоматический режим имеет преимущество перед ручным режимом.
Недостатком известных сервоприводов с управляемым вручную регулятором является то, что разделение в пространстве регулятора и сервопривода возможно только с помощью относительно дорогостоящих дополнительных конструкций. Такие дополнительные конструкции требуют более высоких расходов на изготовление и дополнительной площади.
Раскрытие изобретения
В изобретении поставлена задача создания простого и не дорогостоящего устройства для техники автоматизации с признаками по п. 1 формулы изобретения.
Эта задача решается тем, что предложенный в изобретении модуль для ручного управления сервоприводом имеет генератор и управляемый вручную управляющий элемент для генератора, и модуль может соединяться с приводным элементом привода. Преимущественная форма выполнения предусматривает, что между управляемым вручную управляющим элементом и генератором располагается ручной передаточный механизм. Помимо того, что такая форма выполнения отличается простотой и не требует больших расходов, она также позволяет дополнительно оснастить любой сервопривод предложенным в изобретении модулем.
Кроме того, важным преимуществом предложенного в изобретении решения является то, что, вследствие чисто электрического соединения между сервоприводом и предложенным в изобретении модулем для ручного управления сервоприводом возможно оба компонента без проблем установить в пространстве на любом расстоянии друг от друга. Это приводит к тому, что могут отсутствовать любые дополнительные компоненты, которые ранее требовались для того, чтобы обеспечить соединение ручного управляющего элемента с расположенным на расстоянии сервоприводом. Кроме того, больше нет необходимости в том, чтобы в механической конструкции системы зубчатых колес предусматривались части ручного управляющего элемента для электрического или электрогидравлического приводного механизма сервопривода.
Посредством конструктивного разделения ручного управляющего элемента и сервопривода, прежде всего, стало возможным расположить ручной управляющий элемент в любой зоне, доступной в данный момент для обслуживающего персонала. Таким образом, посредством конструктивного разделения, в частности, возможно
- обеспечить более удобный доступ к ручному управляющему элементу,
- перенести управляющий элемент из опасной зоны в неопасную зону и/или
- расположить управляющие элементы различных сервоприводов в хорошо доступном центральном пункте управления.
В соответствии с преимущественной формой выполнения предложенного в изобретении модуля предусмотрено, что модуль соединяется с приводным элементом в корпусе сервопривода напрямую или через промежуточный контур. Альтернативно предлагается соединить модуль с приводным элементом сервопривода с помощью соединительного кабеля напрямую или через промежуточный контур.
В зависимости от формы выполнения генератора он генерирует напряжение постоянного тока или одно- или многофазное напряжение переменного тока. Преимущественная форма выполнения предложенного в изобретении модуля предусматривает систему управления, которая по генерированной от генератора полярности или по последовательности чередования фаз многофазного генерированного от генератора напряжения переменного тока определяет направление рабочего движения управляющего элемента при ручном управлении. Из этого можно установить направление движения сервопривода с целью закрытия или открытия арматуры. Соответствующая информация о направлении рабочего движения управляющего элемента или направлении движения сервопривода предпочтительно предоставляется обслуживающему персоналу на месте.
Дополнительно или альтернативно к вышеуказанной форме выполнения предлагается, чтобы на модуле был предусмотрен переключающий элемент, с помощью которого может задаваться направление вращения сервопривода при ручном управлении.
Для того чтобы исключить несанкционированный доступ к предложенному в изобретению модулю, предусмотрен электрический или электронный блок предохранителей, который выполнен таким образом, что доступ к модулю с целью ручного управления сервоприводом возможен только при предоставлении соответствующих прав. Например, доступ защищается паролем, либо право доступа может предоставляться через радиосвязь, например, при применении RFID-этикетки. Кроме того, разрешение может выдаваться посредством блока управления более высокого уровня, или может использоваться электрический кодовый переключатель. Само собой разумеется, что вместе с изобретением могут использоваться также другие известные способы защиты от несанкционированного доступа. В частности, здесь можно также сослаться на защиту биометрических данных.
Особенно предпочтительно, чтобы производимая генератором электроэнергия могла использоваться для зарядки опционального резервного аккумулятора. Сохраненная в резервном аккумуляторе электроэнергия используется, в частности, для того, чтобы снабдить электроэнергией сервопривод во время прерывания внешнего питания. Тем самым обеспечивается полная готовность сервопривода к эксплуатации также при отсоединении от внешнего питания.
Кроме того, преимущественно, чтобы электроэнергия, производимая модулем при выходе внешнего питания из строя, могла использоваться также для поддержания других важных функций сервопривода. Эти функции приводятся ниже:
- открытие и закрытие предусмотренного на сервоприводе тормозного или блокирующего устройства;
- управление электрическим или электронным блоком предохранителей;
- активация контрольного блока для вращающего момента, который передается на ведомый вал сервопривода;
- активация электронных управляющих устройств с целью регулирования скорости и/или контроля прошедшего хода; (с помощью вышеуказанных мероприятий - ограничение вращающего момента, прошедшего хода или скорости - можно предотвратить повреждения в результате несанкционированного использования в ручном режиме!)
- коммуникация с блоком управления верхнего уровня;
- сигнализация ручного управления сервоприводом на блоке управления верхнего уровня или на электронных управляющих устройствах, соответствующих сервоприводу;
- активация предусмотренного на модуле электрического кулачкового механизма для сигнализации различных состояний сервопривода или модуля.
Для того чтобы предотвратить неконтролируемое перемещение сервопривода при ручном управлении, предусмотрено устройство для распознавания конечного положения, которое выполнено таким образом, что оно тактильно, визуально или акустически квитирует пользователю достижение предварительно введенного конечного положения сервопривода. Дополнительно или альтернативно предусмотрено, что соответствующее сообщение передается на блок управления верхнего уровня.
Тактильная обратная связь при достижении требуемого конечного положения осуществляется, например, посредством увеличения или уменьшения управляющего усилия ручного управляющего элемента. Также возможно обеспечить тактильное квитирование с помощью вибрационного эффекта, попеременно увеличивая и уменьшая управляющее усилие ручного управляющего элемента.
До сих пор были описаны преимущества, которые имеет предложенное в изобретении решение по сравнению с известными решениями в случае прерывания внешнего питания. Кроме того, изобретение имеет преимущество, если сервопривод работает в стандартном режиме. Предложенный в изобретении модуль может применяться для поддержки сервопривода и работать в качестве сервопривода. В частности, модуль, кроме того, выполнен таким образом, что он может применяться также в качестве датчика направления вращения и скорости для управления сервоприводом при подключении внешнего напряжения питания.
Краткое описание чертежей
Изобретение более подробно поясняется со ссылкой на фигуры. На них показано:
Фиг. 1 схематичное изображение первой формы выполнения известного из уровня техники сервопривода для арматуры;
Фиг. 2 схематичное изображение второй формы выполнения известного из уровня техники сервопривода для арматуры;
Фиг. 3 схематичное изображение третьей формы выполнения известного из уровня техники сервопривода для арматуры;
Фиг. 4 схематичное изображение четвертой формы выполнения известного из уровня техники сервопривода для арматуры;
Фиг. 5 схематичное изображение первой формы выполнения предложенного в изобретении сервопривода;
Фиг. 6 схематичное изображение второй формы выполнения предложенного в изобретении сервопривода;
Фиг. 7 схематичное изображение третьей формы выполнения предложенного в изобретении сервопривода и
Фиг. 8 внешний вид первого предпочтительного варианта выполнения предложенного в изобретении модуля.
Фиг. 9 внешний вид второго предпочтительного варианта выполнения предложенного в изобретении модуля.
Осуществление изобретения
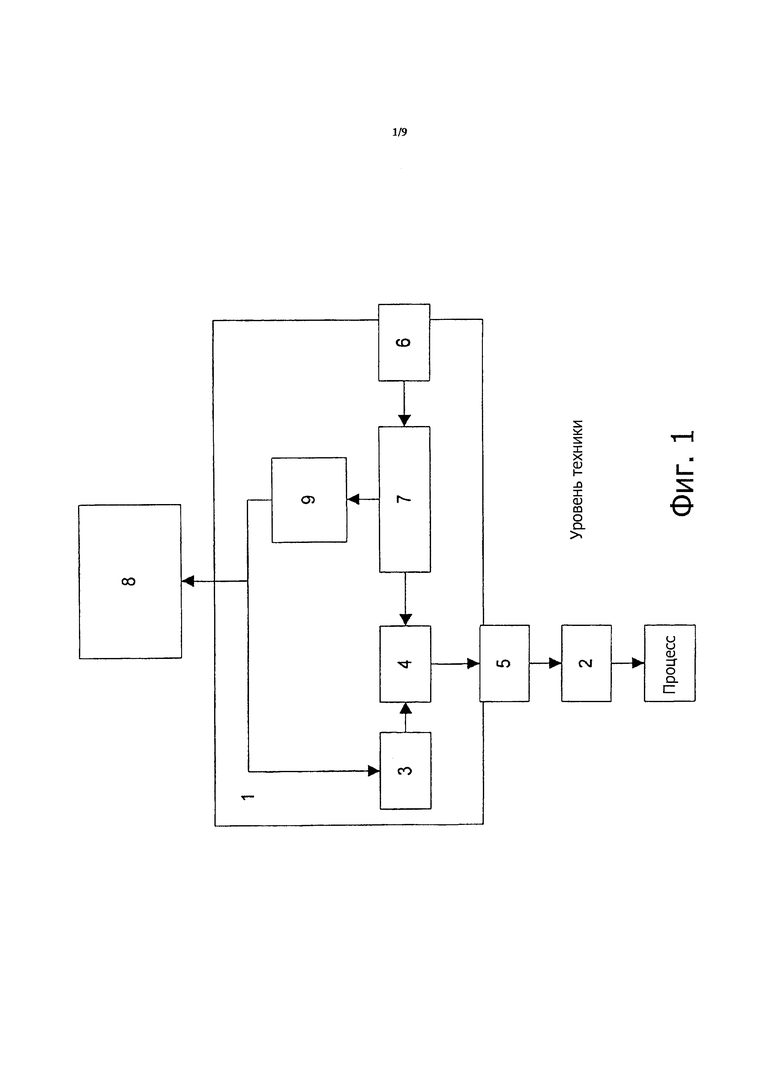
На фиг. 1 показано схематичное изображение первой формы выполнения известного из уровня техники сервопривода 1 для арматуры 2. Под арматурой 2 понимается, в частности, один из описанных в руководстве орган управления. Передача вращающего момента между приводным элементом 3, в частности, двигателем, приводимым в действие с помощью электрической или гидравлической системы, и арматурой 2 выполняется обычно с помощью понижающего редуктора 4, который может иметь различные формы выполнения в зависимости от случая применения. Понижающий редуктор 4 необходим, чтобы преобразовать высокую частоту вращения электрического двигателя 3 в требуемую выходную частоту вращения для управления арматурой 2. В качестве понижающего редуктора 4 может использоваться редуктор любого типа. Примеры приводятся в описании.
Как уже упоминалось выше, в случае аварии сервопривод 1 может отдельно приводиться в действие с помощью ручного управляющего элемента 6. Кроме того, ручной управляющий элемент 6 применяется, например, для ввода в эксплуатацию сервопривода 1. Под управляющим элементом 6 понимается обычно регулировочное колесо с рукояткой, которое управляется вручную обслуживающим персоналом, чтобы привести арматуру 2 в требуемую позицию, т.е. конечное положение. Кроме того, под управляющим элементом 6 может пониматься рукоятка или другой рычажный механизм, например, стопорный механизм.
Для разделения ручного режима и автоматического режима предусмотрен сцепной, или включающий механизм 7. Сцепной или включающий механизм 7 обычно выполнен и/или расположен таким образом, что в автоматическом режиме приводной элемент 3 соединяется с ведомым валом 5 напрямую или через редуктор 4, и ручной управляющий элемент 6 отсоединяется, в то время, как в ручном режиме, т.е. при ручном управлении ведомый вал 5 соединяется с ручным управляющим элементом 6, и привод 3 отсоединяется. Тем самым достигается разделение ручного и автоматического режимов. Сцепной или включающий механизм 7 предпочтительно выполняется таким образом, что ручной управляющий элемент 6 автоматически отсоединяется от ведомого вала 5, как только сервопривод 1 включается в автоматический режим, то есть, в стандартный режим: таким образом, автоматический режим имеет преимущество перед ручным режимом. Соответствующая система управления реализуется в представленном случае через включающий датчик 9, соответствующий включающему механизму 7, и электронное управляющее устройство 8, которое регулирует привод 3 в соответствии с сообщением включающего датчика 9.
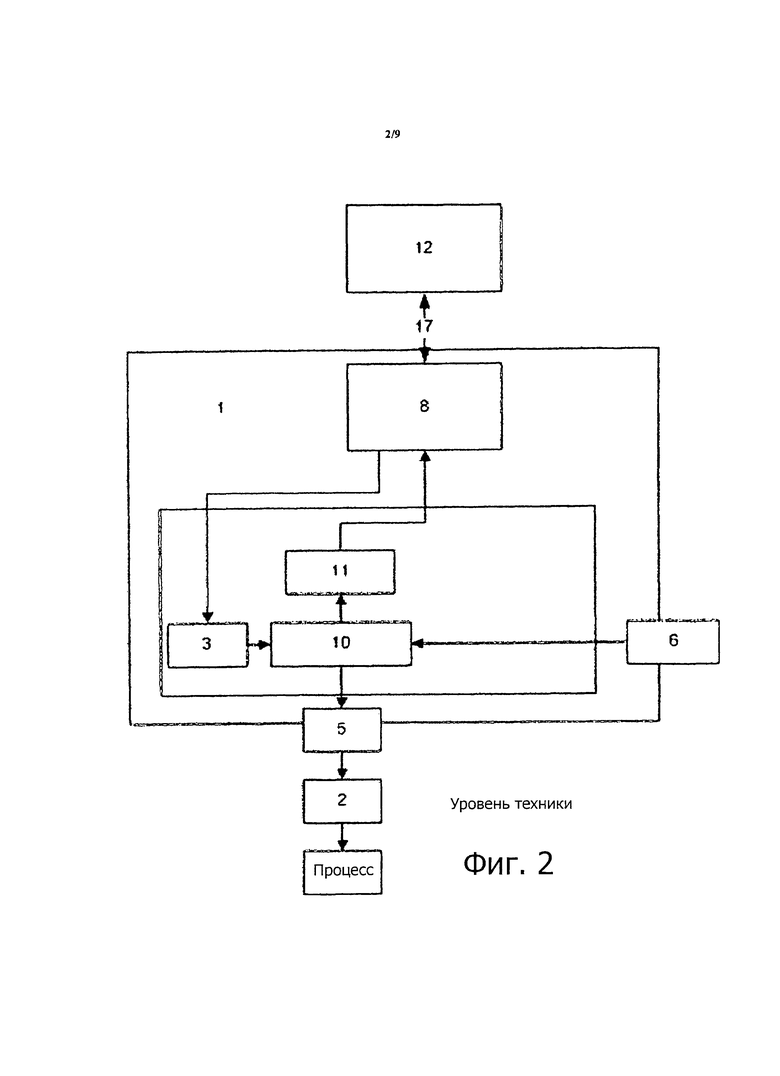
На представленной на фиг. 2 второй форме выполнения известного из уровня техники сервопривода 1 для арматуры 2 приводной элемент 3 и ручной управляющий элемент 6 соединены друг с другом через совмещенный редуктор 10. Совмещенному редуктору 10 соответствует позиционный датчик 11, который передает соответствующую информацию в электронное управляющее устройство 8. Электронное управляющее устройство 8 соединено с пультом управления 12 верхнего уровня. Коммуникация между электронным управляющим устройством 8 и пультом управления 12 выполняется через систему шин 17 в соответствии с одним из применяемых в технике автоматизации и/или стандартизированным протоколом шин.
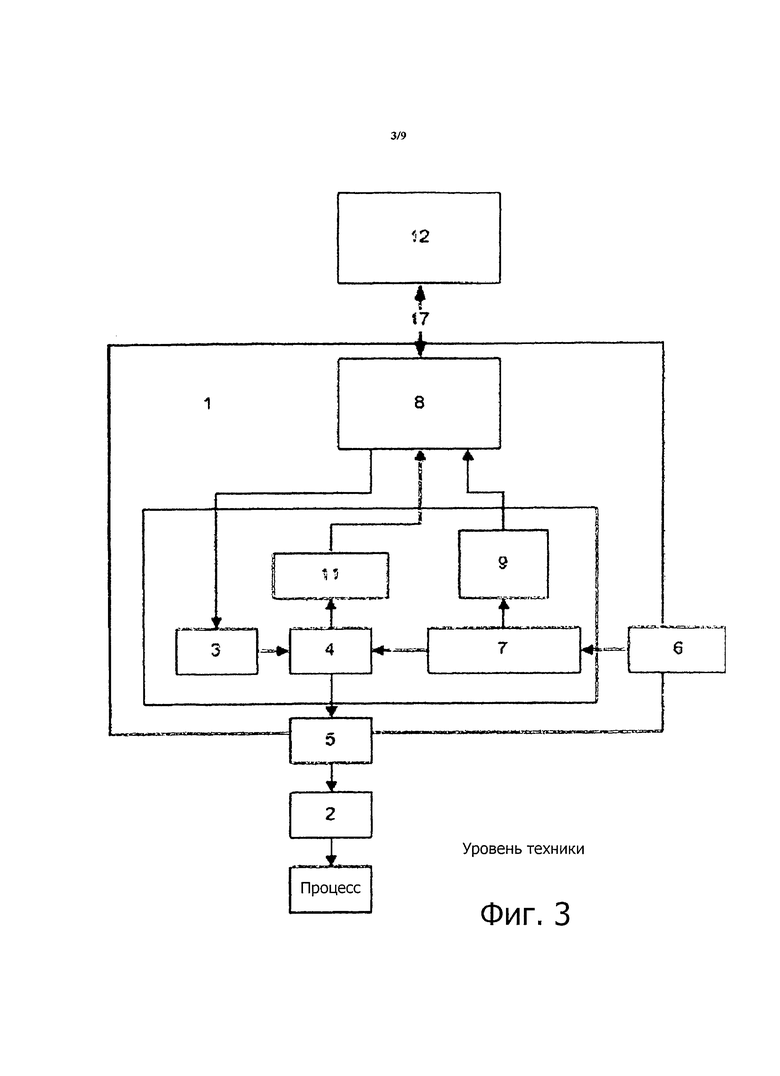
На фиг. 3 показано схематичное изображение третьей формы выполнения одного из известных в уровне техники сервоприводов 1 для арматуры 2. Вместо применяемого на фиг. 2 совмещенного редуктора 10 здесь используется редуктор 4. Между ручным управляющим элементом 6 и редуктором 4 предусмотрен включающий механизм 7 с соответствующим включающим датчиком 7a. Переключение автоматического и ручного режимов выполняется здесь также с помощью электронного устройства 8.
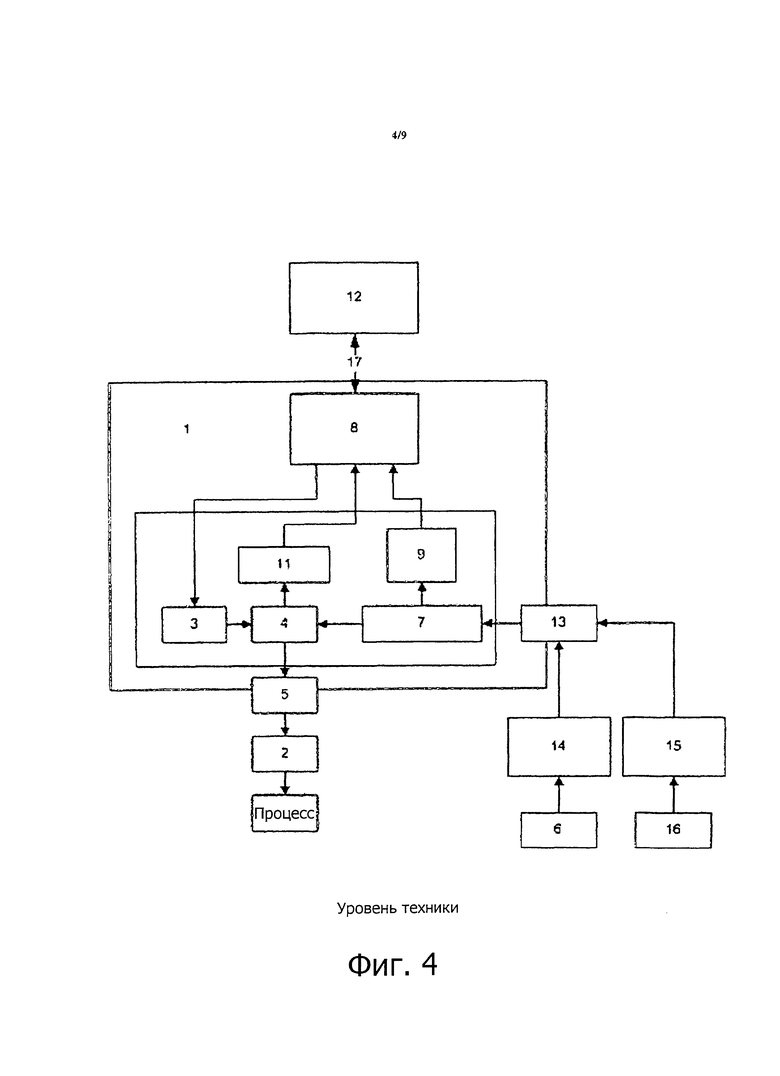
Показанное на фиг. 4 схематическое изображение одной из четырех известных форм выполнения сервопривода 1 для арматуры 2 поясняет расходы, которые необходимо запланировать, если ручной управляющий элемент 6 расположен на расстоянии от сервопривода 1. В этом случае требуется несколько дополнительных конструкций: соединяющий редуктор 14 между ручным управляющим элементом 6 и муфтой 13, включающей рукояткой 16 и удлинителем включающего механизма 15, который также соединен с муфтой 13. В остальном показанная на фиг. 4 форма выполнения соответствует представленной на фиг. 3 форме выполнения.
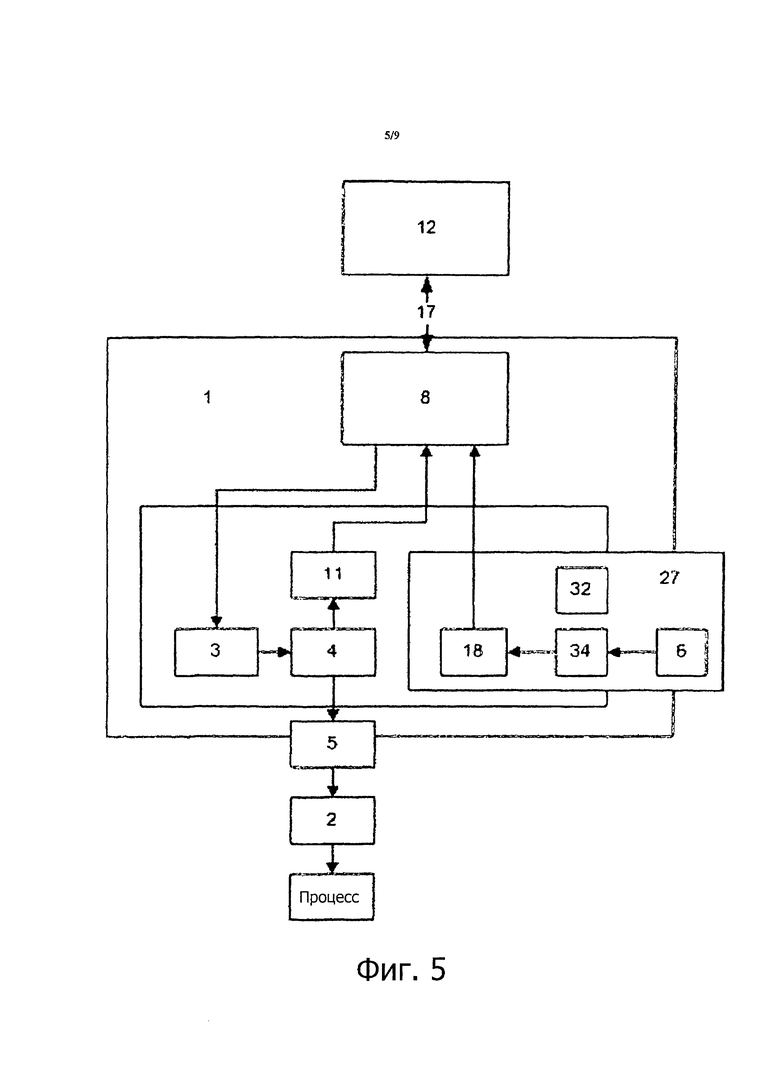
На фиг. 5 показано схематичное изображение одной из первых форм выполнения предложенного в изобретении сервопривода 1. На показанной форме выполнения арматура 2 в стандартном режиме перемещается от приводного элемента 3 с помощью редуктора 4 в требуемое положение. Система управления реализуется через электронное управляющее устройство 8. Кроме этого, редуктору 4 соответствует позиционный датчик 11, который передает соответствующую информацию о положении на электронное управляющее устройство 8. С помощью электронного управляющего устройства 8 осуществляется переключение между автоматическим режимом и ручным режимом. Кроме того, электронное управляющее устройство 8 соединяется с пультом управления 12 верхнего уровня. Коммуникация между электронным управляющим устройством 8 и пультом управления 12 выполняется в соответствии с одним из стандартизированных способов управления, которые обычно применяются в технике автоматизации.
Предложенный в изобретении сервопривод 1 имеет модуль 27, который служит для электрического ручного дистанционного управления сервоприводом 1. Предложенный в изобретении модуль 27 состоит из ручного управляющего элемента 6, генератора 18 и, в данном случае, повышающего или понижающего ручного передаточного механизма 34. Примеры ручных управляющих элементов 6 уже приводились выше.
В случае неисправности, например, при выходе из строя внешнего электропитания 30 сервопривода 1, арматуру 2 можно привести в требуемую позицию с помощью предложенного в изобретении модуля 27. Для этого, например, выполненный в виде рукоятки ручной управляющий элемент 6 поворачивается обслуживающим персоналом. Посредством преобразования механической энергии в электрическую на электронное управляющее устройство 8 поступает электроэнергия, которая необходима для того, чтобы переместить арматуру 2 с помощью приводного элемента 3 в требуемую позицию.
При наличии внешнего электропитания арматуру 2 также можно привести в требуемую позицию с помощью предложенного в изобретении модуля 27. Для этого, например, выполненный в виде рукоятки ручной управляющий элемент 6 поворачивается обслуживающим персоналом. Электронное управляющее устройство привода 8, т.е. опциональное электронное управляющее устройство с маховиком 32 модуля 27 определяет помимо полярности, т.е. положения фаз произведенной электроэнергии, т.е. помимо регулировки переключающего элемента и помимо амплитуды произведенной электроэнергии, параметры направления вращения и параметры скорости для управления приводом 1 с помощью серводвигателя.
Как уже упоминалось, кроме того, можно заряжать резервный аккумулятор 29, как только ручной управляющий элемент 6 приводится в действие. С помощью сохраненной в резервном аккумуляторе 29 электроэнергии на сервоприводе 1 возможно выполнять вышеуказанные дополнительные функции. Тем самым при выходе из строя внешнего питания 30 все важные компоненты сервопривода также обеспечиваются необходимой электроэнергией.
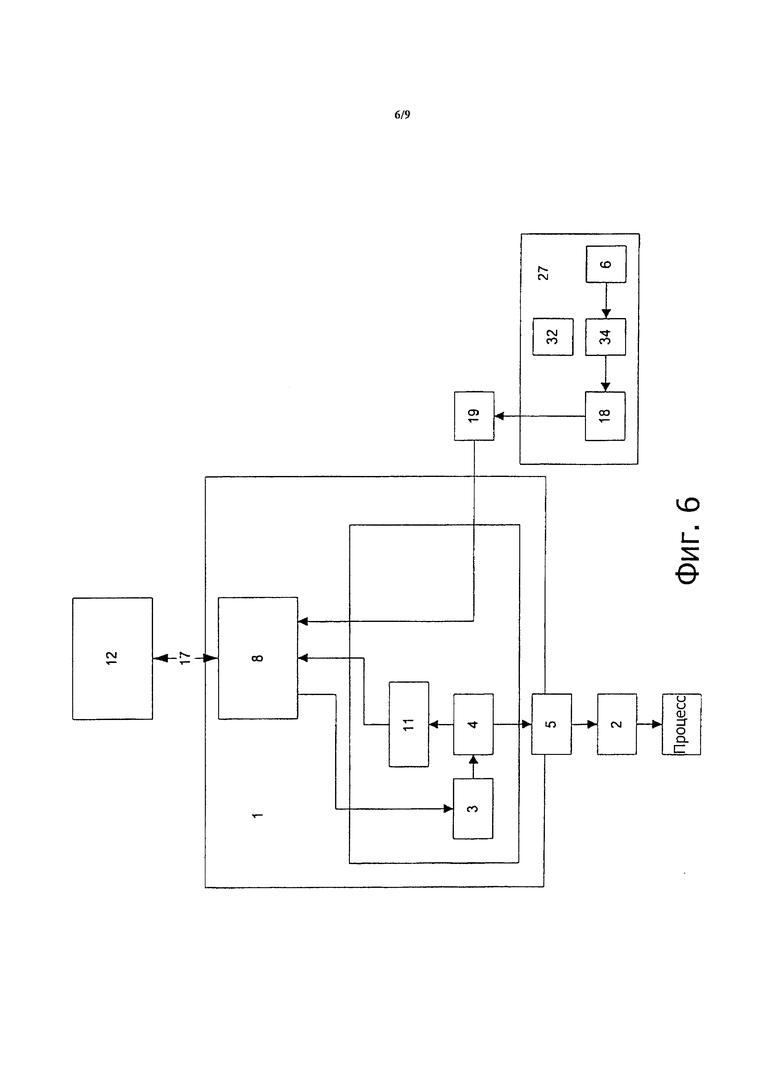
В показанном на фиг. 6 схематичном изображении второй формы выполнения предложенного в изобретении сервопривода 1 модуль 27 находится на расстоянии от сервопривода 1. Предпочтительно модуль 27 располагается в отдельном корпусе 31 и, таким образом, выполнен как самостоятельный блок. Модуль 27 соединен с электронным управляющим устройством 8 с помощью соединительного кабеля 19. Преимущества такой формы выполнения и возможности, которые открывает эта форма выполнения, уже подробно пояснялись выше, так что можно отказаться от повторения.
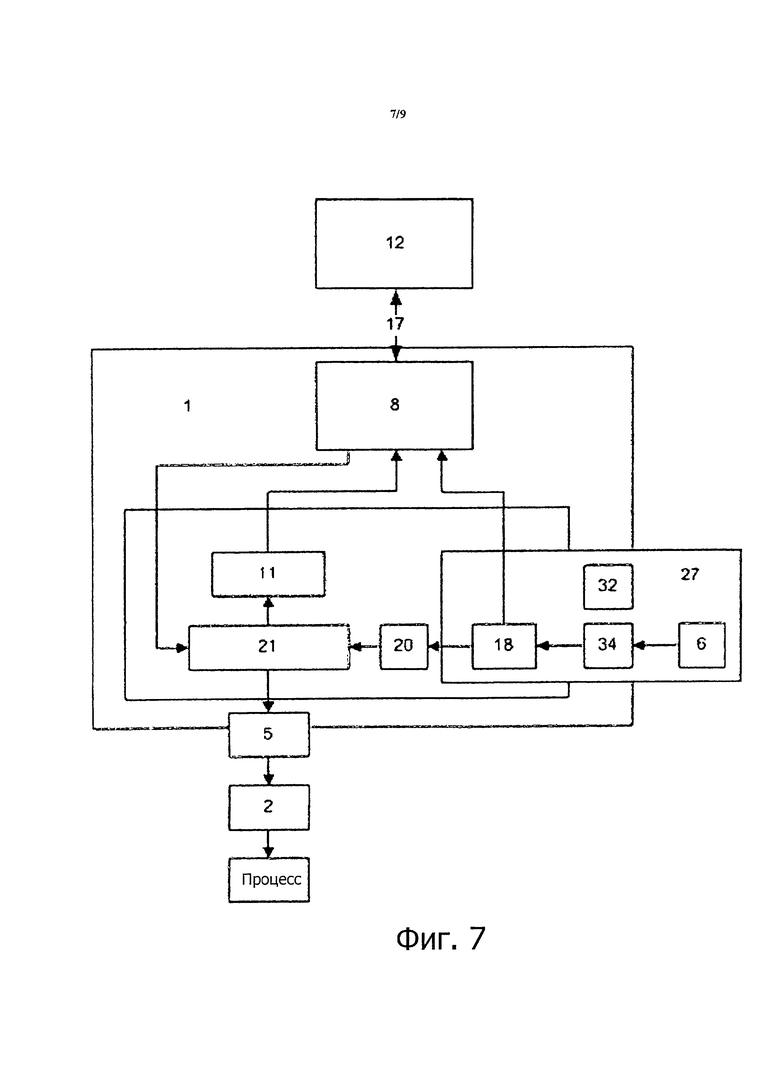
В то время, как в показанном на фиг. 5 и на фиг. 6 варианте выполнения сервопривод 1 управляется с помощью электрического двигателя в качестве приводного элемента 3, в показанном на фиг. 7 варианте выполнения применяется гидравлический привод. Для случая, когда арматура 2 управляется в ручном режиме, соответствующее сообщение от генератора 18 передается на электронное управляющее устройство 8. Кроме того, электронное управляющее устройство 8 питается электроэнергией от генератора 18. Кроме этого, генератор 18 снабжает электроэнергией гидравлический насос 20. Через гидравлический насос 20 энергия поступает на гидравлический исполнительный механизм 21.
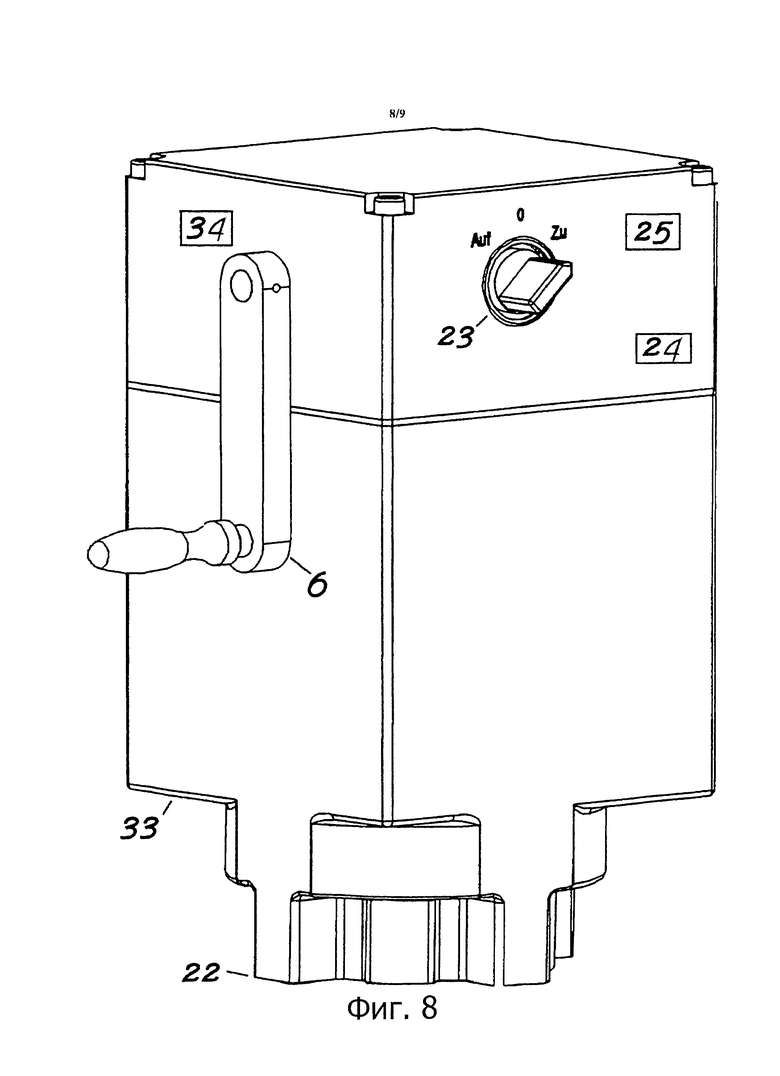
На фиг. 8 показан внешний вид первого предпочтительного варианта выполнения предложенного в изобретении интегрированного в приводе 1 модуля 27. Модуль 27, состоящий из генератора 18 (на фиг. 8 не показан отдельно), из выполненного в виде рукоятки ручного управляющего элемента 6 и, в данном случае, повышающего или понижающего ручного передаточного механизма 34, расположен в корпусе привода 33.
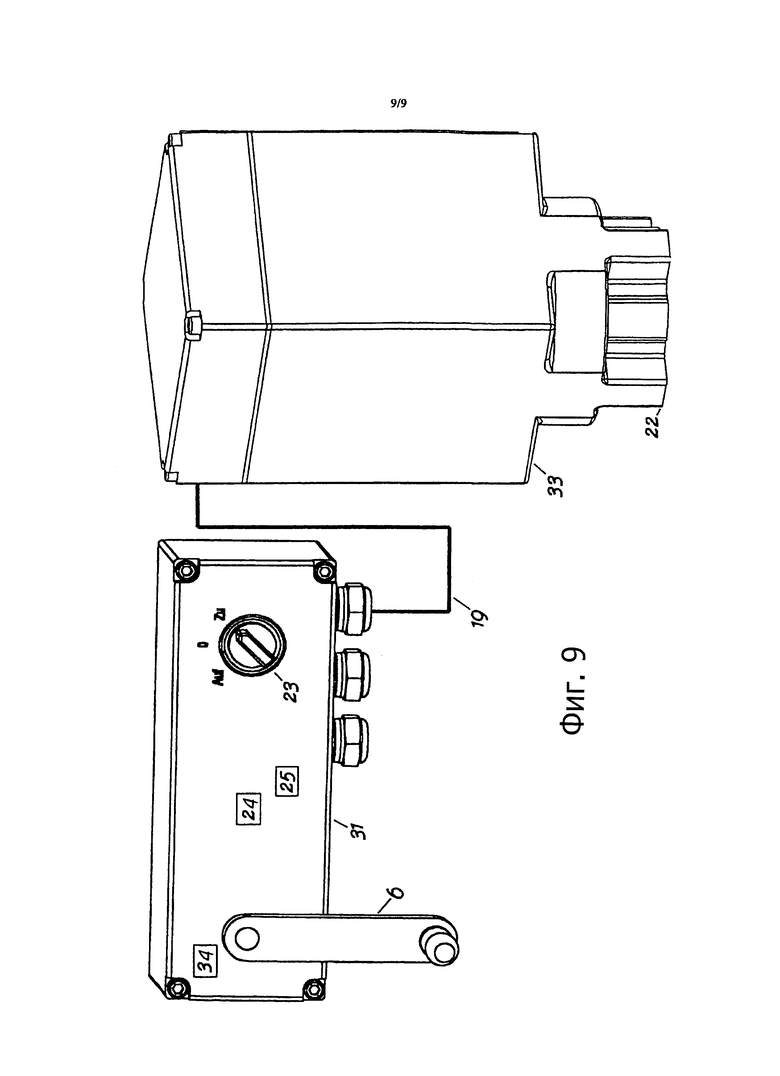
На фиг. 9 показан внешний вид второго предпочтительного варианта выполнения предложенного в изобретении модуля 27, расположенного отдельно от привода в корпусе 31. Модуль 27 образует тем самым самостоятельный блок, который также без проблем может быть соединен впоследствии с обычным электрическим или гидравлическим сервоприводом 1. Соединение блока, т.е. модуля 27 с электронным управляющим устройством 8 выполняется, например, электрически с помощью соединительного кабеля 19.
Кроме этого, на корпусе 31 и/или в корпусе 33, в котором размещен модуль 27, предусмотрен электрический или электронный блок предохранителей 24. Блок предохранителей 24 выполнен таким образом, что доступ к модулю 27 с целью ручного управления сервоприводом 1 возможен только при наличии соответствующих прав. Примеры выполнения блока предохранителей 24 уже были подробно описаны выше.
Кроме того, предложенному в изобретении модулю 27, т.е. блоку, соответствует сигнализатор конечного положения 25. Сигнализатор конечного положения 25 предпочтительно выполнен таким образом, что в случае ручного управления сервоприводом 1 достижение предварительно заданной позиции, т.е. требуемого конечного положения, квитируется для обслуживающего персонала тактильно, визуально или акустически. Таким образом, обслуживающий персонал непосредственно знает, когда арматура 2 достигла требуемого конечного положения. Тем самым эффективно предотвращается опасность перехода арматуры точки конечного положения. Альтернативно или дополнительно предусмотрено, что при достижении конечного положения на блок управления верхнего уровня 12 передается соответствующее сообщение.
Кроме того, на модуле 27, или на корпусе 31, или на корпусе 33, в котором встроен модуль 27, предусмотрен переключающий элемент 23, с помощью которого может задаваться направление вращения сервопривода 1 при ручном управлении. Так, посредством установки переключающего элемента 23 в позицию «ЗАКРЫТО» при ручном управлении управляющего элемента 6 обслуживающий персонал может - независимо от выбранного направления вращения - переместить арматуру 2 в закрытое положение.
Список условных обозначений
1. Сервопривод
2. Арматура
3. Приводной элемент / электрический или гидравлический привод
4. Редуктор
5. Ведомый вал
6. Ручной управляющий элемент
7. Включающий механизм
8. Электронное управляющее устройство
9. Маховик / включающий датчик
10. Совмещенный редуктор
11. Позиционный датчик
12. Пульт управления / блок управления верхнего уровня
13. Муфта
14. Соединяющий редуктор
15. Удлинитель включающего механизма
16. Включающая рукоятка
17. Система шин
18. Генератор
19. Соединительный кабель
20. Гидравлический насос
21. Гидравлический исполнительный механизм
22. Интерфейс
23. Переключающий элемент
24. Электрический блок предохранителей
25. Электрический датчик конечного положения
26. ---
27. Модуль
28. Промежуточный контур / Конденсатор
29. Резервный аккумулятор
30. Внешнее питание
31. Корпус
32. Система управления
33. Корпус привода
34. Ручной передаточный механизм
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПРОДОЛЬНОЕ ДВИЖЕНИЕ | 2011 |
|
RU2528519C2 |
| Мобильный расточной станок | 2020 |
|
RU2753848C1 |
| Автоматическая мобильно-позиционированная роботизированная система локального пожаротушения | 2016 |
|
RU2637745C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ | 1996 |
|
RU2219077C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПРЕОДОЛЕНИЯ ПРЕПЯТСТВИЙ | 2015 |
|
RU2606915C2 |
| УСТРОЙСТВО ДЛЯ ПРЕВРАЩЕНИЯ СОЛНЕЧНОЙ ЭНЕРГИИ В ЭЛЕКТРИЧЕСКУЮ | 2009 |
|
RU2402719C1 |
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
| Многооборотный гидравлический привод | 2020 |
|
RU2756969C1 |
| СЕРВОПРИВОД ТРУБОПРОВОДНОЙ АРМАТУРЫ, ПРИВОДИМЫЙ В ДЕЙСТВИЕ ТЕКУЧЕЙ СРЕДОЙ | 2011 |
|
RU2551468C2 |
| Электропривод трубопроводной арматуры с ручным дублером | 2022 |
|
RU2797329C1 |
Изобретение касается устройства для техники автоматизации, состоящего из сервопривода и модуля для ручного управления сервоприводом. Причем в качестве приводного элемента для сервопривода предусмотрен электрический привод или электрогидравлический привод. Причем модуль имеет генератор и ручной управляющий элемент для генератора. Причем модуль соединен электрически с приводным элементом сервопривода. Ручной управляющий элемент и генератор образуют модуль для ручного электрического удаленного задействования сервопривода. При этом модуль электрически соединен с приводным элементом сервопривода и электронным управляющим устройством. При этом электронное управляющее устройство в ручном режиме снабжают необходимой энергией, получаемой в результате преобразования механической энергии в электроэнергию, чтобы перемещать арматуру с помощью приводного элемента в требуемую позицию. Изобретение направлено на уменьшение габаритов и стоимости устройства техники автоматизации. 9 з.п. ф-лы, 9 ил.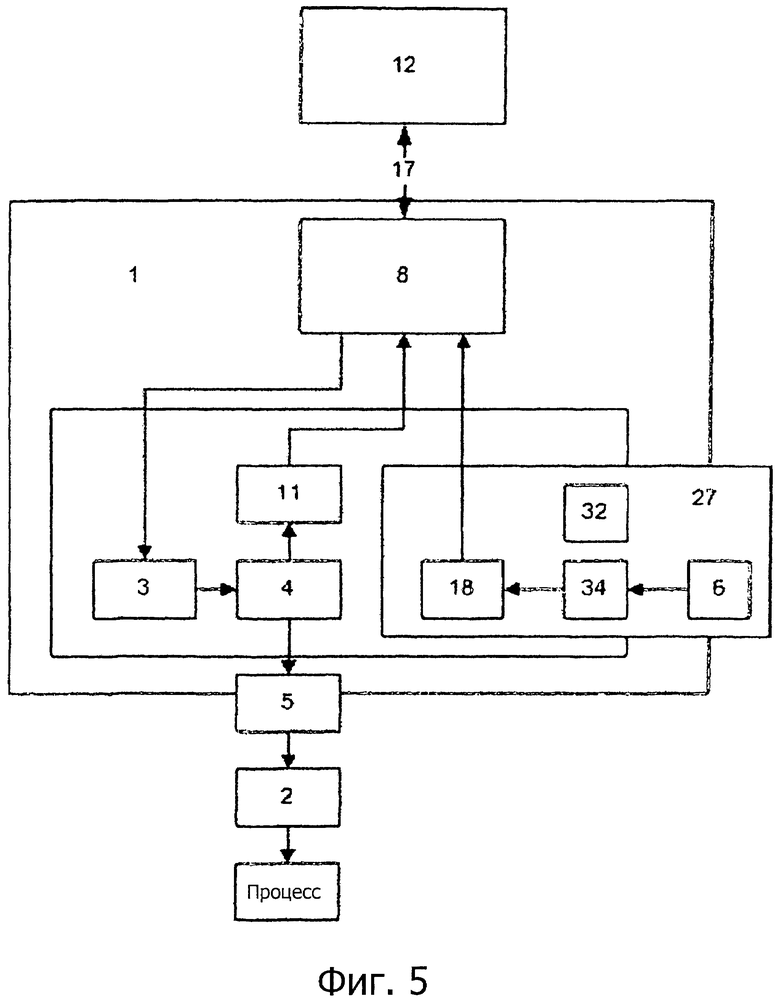
1. Устройство для техники автоматизации с сервоприводом (1) для перемещения арматуры (2), причем в качестве приводного элемента (3) для сервопривода (1) при нормальной работе предусмотрен электропривод или электрогидравлический привод,
причем сервопривод (1) через редуктор (4) преобразует высокое значение числа оборотов в минуту электрического или электрогидравлического привода (3) в постоянное выходное число оборотов в минуту для перемещения арматуры (2), при этом предусмотрен ручной управляющий элемент (6), электронное управляющее устройство (8) и датчик (11) положения, отличающееся тем, что
ручной управляющий элемент (6) и генератор (18) образуют модуль для ручного электрического удаленного задействования сервопривода (1), при этом модуль (27) электрически соединен с приводным элементом (3) сервопривода (1) и электронным управляющим устройством (8), при этом электронное управляющее устройство (8) в ручном режиме снабжают необходимой энергией, получаемой в результате преобразования механической энергии в электроэнергию, чтобы перемещать арматуру (2) с помощью приводного элемента (3) в требуемую позицию.
2. Устройство по п. 1, в котором датчик (11) положения связан с редуктором (4) и передает соответствующую информацию о положении на электронное управляющее устройство (8).
3. Устройство по п. 1, в котором модуль (27) соединен с приводным элементом (3) в корпусе сервопривода (1) напрямую или через промежуточный контур (28) или модуль (27) соединен с приводным элементом (3) сервопривода (1) с помощью соединительного кабеля (19) напрямую или через промежуточный контур (28).
4. Устройство по п. 1, в котором электронное управляющее устройство (8) по генерированной от генератора (18) полярности или по последовательности чередования фаз многофазного генерированного от генератора (18) напряжения переменного тока определяет направление рабочего движения управляющего элемента (6) сервопривода (1).
5. Устройство по п. 1, в котором на модуле (27) предусмотрен переключающий элемент (23), с помощью которого может задаваться направление вращения сервопривода (1) при ручном управлении.
6. Устройство по п. 1, в котором произведенная модулем (27) электроэнергия может использоваться для зарядки резервного аккумулятора (29), причем сохраненная в резервном аккумуляторе (29) электроэнергия используется для того, чтобы снабдить электроэнергией сервопривод (1) во время прерывания внешнего питания.
7. Устройство по п. 1, в котором на модуле (27) предусмотрен электрический или электронный блок предохранителей (24), который выполнен таким образом, что доступ к модулю (27) для ручного управления сервоприводом (1) возможен только при предоставлении соответствующих прав.
8. Устройство по п. 1, которое выполнено с возможностью использования электроэнергии, произведенной в случае ручного управления сервоприводом (1) при выходе внешнего питания из строя, по меньшей мере, для следующих функций:
- открытия и закрытия, предусмотренного на сервоприводе (1) тормозного или блокирующего устройства;
- управления электрическим или электронным блоком предохранителей (24);
- активации контрольного блока для вращающего момента, который передается на ведомый вал (5) сервопривода (1);
- активации блока обработки данных (8) с целью регулирования скорости и/или контроля прошедшего хода;
- коммуникации с блоком управления верхнего уровня (12);
- сигнализации ручного управления сервоприводом (1) на блоке управления верхнего уровня (12) или на электронных управляющих устройствах (8), соответствующих сервоприводу (1);
- активации, предусмотренного на модуле (27) или в сервоприводе (1) электрического кулачкового механизма для сигнализации различных состояний сервопривода (1) или модуля (27).
9. Устройство по п. 1, в котором модуль (27) выполнен с возможностью применения в качестве датчика направления вращения и скорости для управления сервоприводом (1) при подключении внешнего напряжения питания.
10. Устройство по п. 8 или 9, в котором предусмотрено устройство для распознавания конечного положения (25), которое выполнено таким образом, что в случае ручного управления сервоприводом (1) оно тактильно, визуально или акустически квитирует пользователю достижение предварительно введенного конечного положения и/или что соответствующее сообщение передается на блок управления верхнего уровня (12).
| Устройство для закрепления деталей | 1980 |
|
SU901016A1 |
| CN 101598232 A, 09.12.2009 | |||
| КЛАПАН ЭЛЕКТРОМАГНИТНЫЙ С РУЧНЫМ ДУБЛЕРОМ | 2006 |
|
RU2319055C1 |
| US2011037011 A1, 17.02.2011. | |||

