Изобретение относится к специализированным расточным станкам для восстановления или ремонта изделий путем расточки. Станок предназначен для расточки цилиндрических отверстий непосредственно на подлежащем ремонту узле.
Из уровня техники известен расточной станок с ЧПУ (RU 131322U1, МПК В23В 41/00, опубл. 20.08.2013), который содержит станину с установленным на ней с возможностью перемещения по ее направляющим столом, на торце которого закреплена расточная головка с резцами, средство для установки обрабатываемой детали, главный привод расточной головки и привод радиальной подачи. Средство для установки обрабатываемой детали выполнено в виде жестко закрепленного на станине портала с поворотным столом, а расточная головка включает поворотный корпус, кинематически связанный с главным приводом, и установленные в нем с возможностью радиального перемещения от привода радиальной подачи салазки, на которых закреплены расточные борштанги с размещенными на них оправками с резцами.
Недостатком известного технического решения является то, что расточной станок выполнен стационарным и не может использоваться непосредственно на подлежащем ремонту узле, без необходимости полной разборки агрегата и транспортировки его в ремонтную зону.
Наиболее близким техническим решением к заявленному изобретению и выбранным в качестве прототипа признан переносной станок для механической обработки уплотнительных поверхностей седел клиновых и шиберных задвижек (RU 46696U1, МПК В23В 41/00, В23В 43/00, опубл. 27.05.2005). Станок позволяет обрабатывать седла задвижек без удаления их с трубопроводов, при этом он содержит устройство крепления суппорта станка на обрабатываемой задвижке, направляющую, закрепленную в суппорте станка с возможностью ее перемещения параллельно и перпендикулярно обрабатываемой поверхности, редуктор с двигателем, установленный на направляющей, клиноременную передачу, передающую вращение от вала редуктора на вал блока шестерен, блок шестерен, механизм подачи резца.
Недостатком переносного станка является то, что он предназначен в первую очередь для обработки рабочих поверхностей седел клиновых и шиберных задвижек при ремонте трубопроводной арматуры и не может быть адаптирован для расточки вкладышей моторно-осевых подшипников. Кроме того, в конструкции станка не предусмотрены средства числового программного управления, позволяющие управлять им в полуавтоматическом и автоматическом режимах.
Технической задачей, на решение которой направлено заявленное изобретение, является обеспечение возможности расточки горловины остова, а также вкладышей моторно-осевых подшипников тяговых электродвигателей тепловозов и электровозов при одновременном сохранении мобильности, надежности и низкой стоимости расточного станка.
Указанная задача решена тем, что мобильный расточной станок содержит цилиндрический корпус, внутри которого размещен червячный редуктор, включающий в себя ведущий вал, установленный на подшипниках, с закрепленным на нем червячным колесом, связанным зубчатой передачей с червячным валом, установленным в призматическом корпусе, закрепленном на внешней поверхности цилиндрического корпуса станка. На торцах ведущего вала консольно закреплены две борштанги, каждая из которых выполнена в виде трубы с продольным пазом, на конце которой на внешней поверхности на подшипнике установлена распорка, а на торце упомянутой трубы закреплена ведущая шестерня двухступенчатого редуктора блока автоматической продольной подачи, закрытого кожухом. Внутри трубы на гайке установлен ходовой винт, снабженный маховиком ручной подачи, с закрепленными на нем ведомой шестерней редуктора блока автоматической продольной подачи и кронштейном, выполненным в виде планки, на концах которой закреплены оси, на первой из которых установлена подвижная в осевом направлении зубчатая муфта, выполненная заодно с втулкой, находящаяся в постоянном зацеплении с ведомой шестерней, и промежуточная шестерня, находящаяся в зацеплении с ведущей шестерней. При этом на втулке зубчатой муфты и на ступице промежуточной шестерни выполнены зубчатые венцы, которые могут совместно образовывать разъемное соединение для передачи крутящего момента от промежуточной шестерни к ведомой шестерне. На ходовой винт каждой из борштанг навинчен резцедержатель с возможностью закрепления в нем резца, выполненный в виде втулки с резьбовым сердечником и внутренними поперечными ребрами, совмещенными с продольным пазом трубы. На призматическом корпусе закреплен сервопривод, ведущий вал которого соединен с червячным валом. К сервоприводу подключен силовой выход блока управления станком, выполненного на основе микроконтроллера, а к его измерительным входам подключены выходы концевых датчиков, закрепленных на торцах цилиндрического корпуса и распорках.
Положительным техническим результатом, обеспечиваемым раскрытой выше совокупностью признаков изобретения, является возможность выполнять с помощью станка расточку горловины остова, а также вкладышей моторно-осевых подшипников тяговых электродвигателей тепловозов и электровозов в автоматическом режиме. При этом за счет применения в конструкции станка привода, выполненного в виде червячного редуктора, борштанг, двухступенчатого редуктора блока автоматической продольной подачи и блока управления обеспечивается возможность использовать один сервопривод, как для вращения резцедержателя, так и для его продольного перемещения.
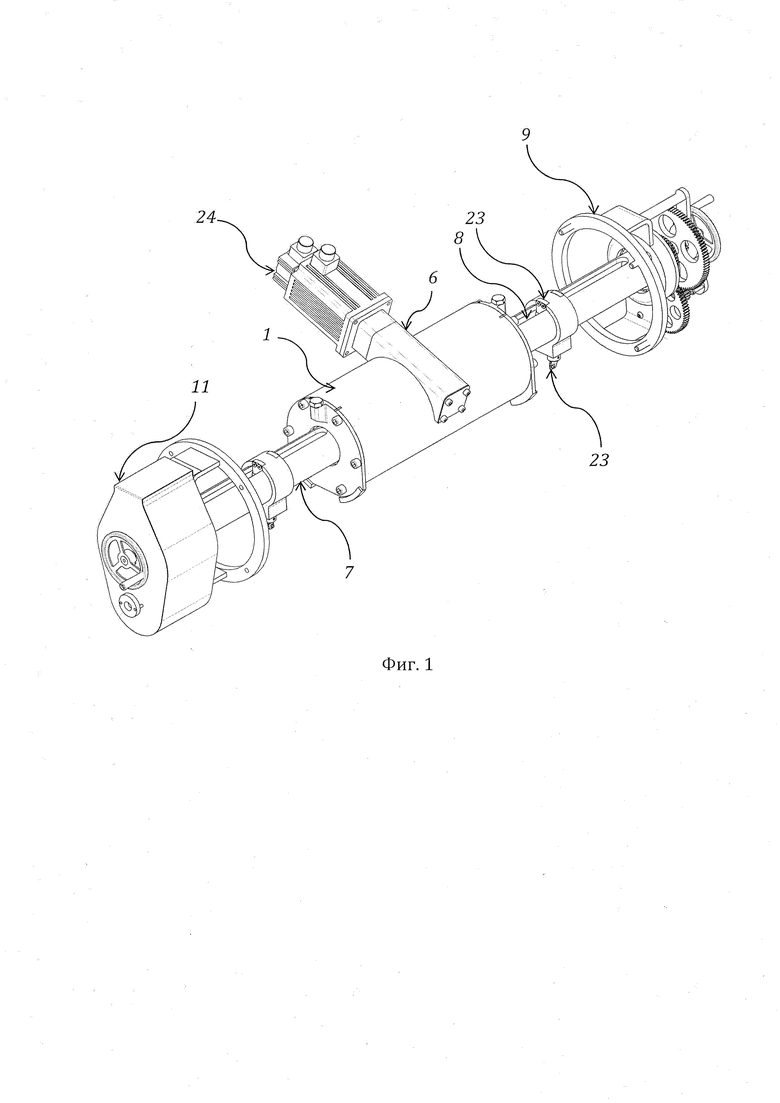
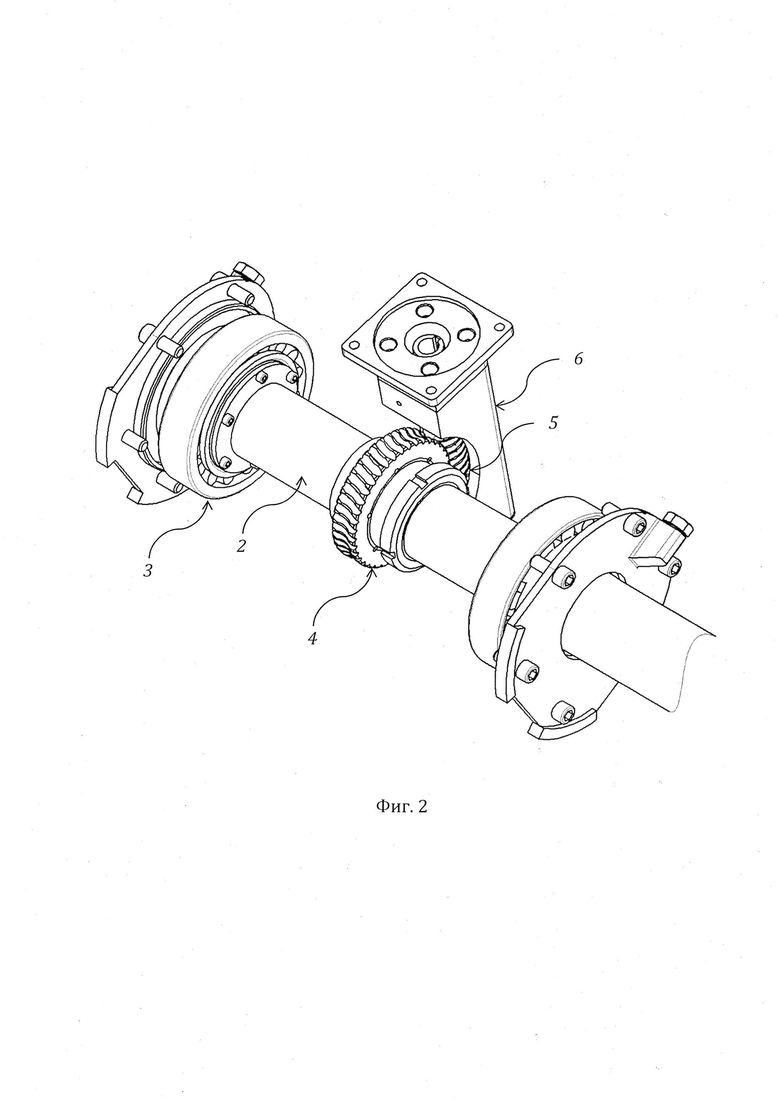
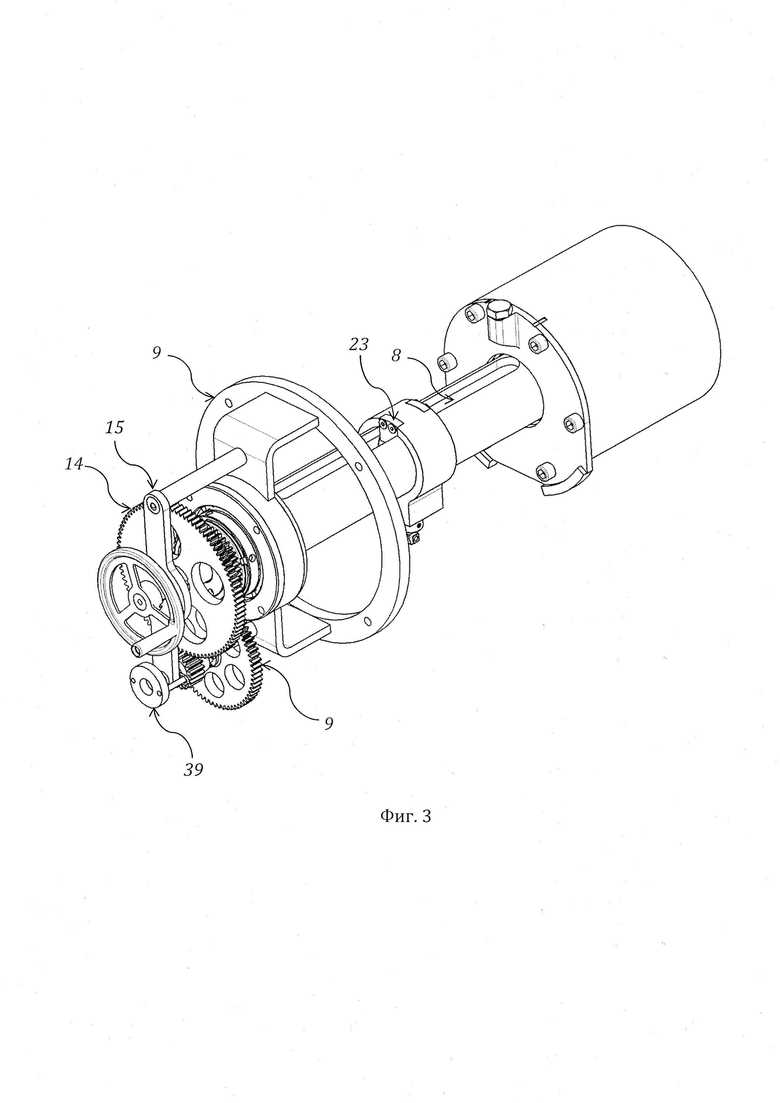
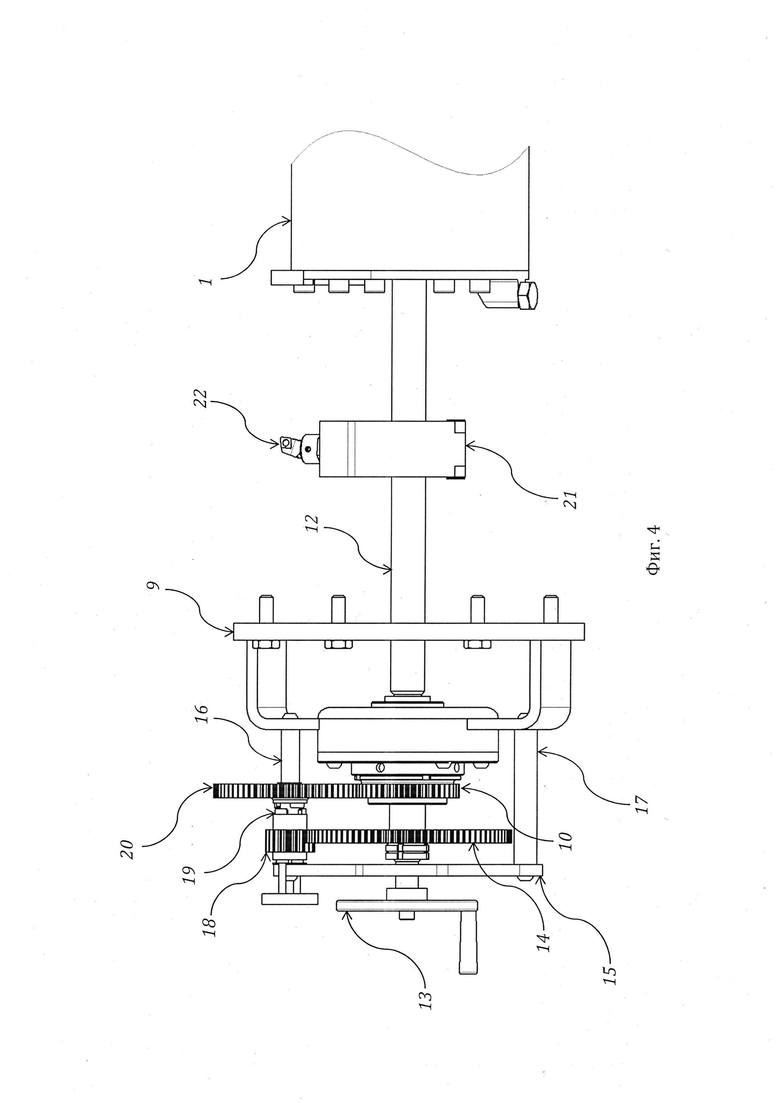
Конструкция мобильного расточного станка поясняется чертежами, где на фиг. 1 показан его внешний вид в изометрической проекции; на фиг. 2 представлен внешний вид червячного редуктора станка в изометрической проекции со снятым корпусом; на фиг. 3 приведен внешний вид двухступенчатого редуктора блока автоматической продольной подачи в изометрической проекции; на фиг. 4 приведен внешний вид двухступенчатого редуктора блока автоматической продольной подачи вид сбоку; на фиг. 5 приведена структурная схема блока управления станком.
Мобильный расточной станок устроен следующим образом.
Основой станка является сварной цилиндрический корпус 1, внутри которого размещен червячный редуктор с передаточным отношением 20, включающий в себя ведущий вал 2, установленный на подшипниках 3, с закрепленным на нем червячным колесом 4, связанным зубчатой передачей с червячным валом 5, установленным в призматическом корпусе 6, закрепленном на внешней поверхности цилиндрического корпуса 1 станка. На торцах ведущего вала консольно закреплены две борштанги каждая из которых выполнена в виде трубы 7 с продольным пазом 8, на конце которой на внешней поверхности на подшипнике установлена распорка 9, а на торце упомянутой трубы 7 закреплена ведущая шестерня 10 двухступенчатого редуктора блока автоматической продольной подачи, закрытого кожухом 11 по легкой прессовой посадке. Внутри трубы на гайке установлен ходовой винт 12, снабженный маховиком ручной подачи 13, с закрепленными на нем ведомой шестерней 14 двухступенчатого редуктора блока автоматической продольной подачи и кронштейном, выполненным в виде планки 15, на концах которой установлены оси 16 и 17. На первой оси установлена подвижная в осевом направлении зубчатая муфта 18, выполненная заодно с втулкой 19, находящаяся в постоянном зацеплении с ведомой шестерней 14, и промежуточная шестерня 20, находящаяся в зацеплении с ведущей шестерней 10. При этом на втулке 19 зубчатой муфты 18 и на ступице промежуточной шестерни 20 выполнены зубчатые венцы, которые могут совместно образовывать разъемное соединение для передачи крутящего момента от промежуточной шестерни 20 к ведомой шестерне 14. На ходовой винт 12 каждой из борштанг навинчен резцедержатель 21 с возможностью закрепления в нем резца 22, выполненный в виде втулки с резьбовым сердечником (на фигурах условно не показан) и внутренними поперечными ребрами 23, совмещенными с продольным пазом 8 трубы 7. На призматическом корпусе 6 закреплен сервопривод 24, ведущий вал которого соединен с червячным валом 5. К сервоприводу 24 подключен силовой выход 25 блока управления станком, а к его измерительным входам 26 подключены выходы концевых датчиков 27, закрепленных на торцах цилиндрического корпуса 1 и распорках 9.
Блок управления может быть выполнен на основе микроконтроллера 28, содержащего микропроцессорное ядро 29, соединенное с помощью системной шины с FLASH-памятью программ 30, SRAM-памятью данных 31, многоканальным аналого-цифровым преобразователем ADC 32, универсальным асинхронным приемопередатчиком UART 33, интерфейсом ввода/вывода общего назначения, сгруппированного, по крайней мере, в два GPI/O-порта ввода-вывода 34 и 35, и модулем подключения SD-карты 36.
К линиям аналого-цифрового преобразователя ADC 32 подключены измерительные входы 26, универсальный асинхронный приемопередатчик UART 33 подключен к Bluetooth-модулю 37, линии первого GPI/O-порта ввода-вывода 34 подключены к силовому выходу 25, ко второму GPI/O-порту ввода-вывода 35 подключен пульт оператора и блок автоматических выключателей, а к модулю подключения SD-карты 36 может быть подключено устройство для чтения карт памяти (card reader), в которое установлена и электрически соединена с модулем SD-карта 38. Блок управления снабжен пультом оператора, содержащим клавиши «Старт» и «Стоп», а также светодиодные индикаторы текущих режимов работы устройства.
В качестве сервопривода 24 может быть использован сервопривод постоянного тока с двигателем мощностью 1,5 кВт, в качестве которого целесообразно применить модель ADTECH QS7 (Сервопривод ADTECH QS7 // AliExpress.ru.URL:https://h5.aliexpress.ru/item/4000994043979.html (дата обращения: 10.11.2020).). Измерительные входы 26 могут быть выполнены на основе операционных усилителей. Силовой выход 25 может быть выполнен на основе тиристорных или транзисторных ключей. В качестве микроконтроллера может быть применена микросхема LPC2478(Single-chip 16-bit/32-bit micro; 512 kB flash, Ethernet, CAN, LCD, USB 2.0 device/host/OTG, external memory interface // LPC2478. URL: https://www.nxp.com/docs/en/data-sheet/LPC2478.pdf), основанная на микропроцессорном ядре ARM7TDMI-S, работающем на частоте 180 МГц, а в качестве Bluetooth-модуля может быть использована сборка НС-05(Bluetooth модуль HC-05 // 3DiY. URL: https://3d-diy.ru/wiki/arduino-moduli/bluetooth-modul-hc-05/).
Мобильный расточной станок работает следующим образом.
В качестве восстанавливаемых деталей выступают вкладыши моторно-осевых подшипников тяговых электродвигателей, при этом применение рассмотренного в настоящей заявке станка, получившего обозначение «Сармат ПРС ТД-250», позволяет при ремонте полностью отказаться от применения стационарных дорогостоящих расточных агрегатов.
Станок доставляется к месту ремонта тягового электродвигателя, например модели ТЭД-18, собирается и подключается к источнику питания. Далее выполняют частичную разборку двигателя, включающую в себя отвинчивание болтов и снятие крышек букс, а также снятие верхней половины вкладыша. Затем на нижнюю половину вкладыша устанавливают станок, возвращают на место верхнюю половину вкладыша и устанавливают крышки букс, фиксируя их болтами, при этом распорки 9 станка, упираясь в корпус ремонтируемого электродвигателя, обеспечивают его надежную фиксацию. Затем на шестерни 10 редукторов блоков автоматической продольной подачи устанавливают кожухи 11 для обеспечения безопасности работ, при этом базовые пятки, закрепленные на нижних поверхностях кожухов 11, и распорные винты, установленные на их верхних поверхностях (пятки и опорные винты на фигурах условно не показаны), позволяют повысить жесткость фиксации распорок 9.
Далее с помощью пульта блока управления активируют сервопривод 24, после чего червячное колесо 4, передавая вращающий момент на ведущий вал 2, приводит во вращение борштанги, при этом за счет поперечных ребер 23 совмещенных с продольными пазами 8 резцедержатели вращаются совместно с борштангами. Затем для выполнения расточной операции с помощью толкателя 39 приводят зубчатую муфту 18 в зацепление с промежуточной шестерней 20, после чего редуктор блока автоматической продольной подачи активируется, и его ведомая шестерня 14 начинает передавать вращающий момент на ходовой винт 12, что обеспечивает продольное движение резцедержателя 21 пропорционально скорости вращения борштанг. В результате этого резец 22 врезается в обрабатываемую восстанавливаемую деталь в осевом направлении и растачивает вкладыш. В случае разъединения зубчатой муфты 18 и промежуточной шестерни 20, крутящий момент на ходовой винт может быть передан вручную с помощью маховика ручной подачи 13, при этом зубья промежуточной шестерни и зубчатой муфты 18 находятся всегда в зацеплении, что исключает удары зубьев колес при повторном зацеплении зубчатой муфты 18 и промежуточной шестерни 20.
При выполнении расточных операций микроконтроллер 28 блока управления на основе управляющей программы, хранящейся во FLASH-памяти 30, с использованием SRAM-памяти данных 31 управляет сервоприводом 24 с помощью линий первого GPI/O-порта 34. При этом для управления скоростью вращения вала сервопривода могут использоваться широтно-импульсно модулированные сигналы.
Во все время работы станка микроконтроллер 28 опрашивает концевые датчики с помощью аналого-цифрового преобразователя 32 с целью предотвращения возможного аварийного контакта резцедержателя 21 с цилиндрическим корпусом 1 или распоркой 9. В случае фиксации блоком управления аварийной ситуации он автоматически блокирует привод станка с помощью блока аварийных выключателей.
Для управления работой станка может использоваться как пульт оператора, так и дополнительный выносной пульт, представляющий собой планшетный компьютер, связанный с блоком управления при помощи беспроводного радио-интерфейса Bluetooth. Связь с выносным пультом обеспечивается с помощью универсального асинхронного приемопередатчика UART 33 и Bluetooth-модуля 37. Все типовые настройки и режимы работы станка, такие как скорость вращения резцедержателя, настраиваются и регулируются с помощью упомянутых пультов и могут быть сохранены при необходимости на SD-карте 38 для их дальнейшего использования.
Таким образом, рассмотренный в настоящей заявке расточной станок, является универсальным мобильным средством для выполнения расточных операций и может эффективно применяться при ремонте и восстановлении отверстий, в частности вкладышей моторно-осевых подшипников тяговых электродвигателей транспортных средств, по месту нахождения техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мобильный расточно-наплавочный станок | 2021 |
|
RU2760350C1 |
| Станок для точения фланцев | 2021 |
|
RU2780213C1 |
| Мобильный расточной станок | 2021 |
|
RU2760351C1 |
| Мобильный расточно-наплавочный комплекс | 2020 |
|
RU2753849C1 |
| МОБИЛЬНОЕ ТОКАРНОЕ УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ТОРЦОВ КРУПНОГАБАРИТНЫХ ОБЕЧАЕК | 2001 |
|
RU2200075C2 |
| МОБИЛЬНЫЙ НАПЛАВОЧНЫЙ КОМПЛЕКС «САРМАТ НК 450» | 2021 |
|
RU2773541C1 |
| МОБИЛЬНЫЙ РАСТОЧНО-НАПЛАВОЧНЫЙ КОМПЛЕКС | 2009 |
|
RU2421303C2 |
| Станок для расточки коренных подшипников и корпусных (базисных) деталей автомобилей и тракторов при ремонте | 1954 |
|
SU101079A1 |
| Система программированного профилирования поверхности катания колесной пары рельсового транспортного средства | 2018 |
|
RU2709910C2 |
| СПОСОБ РАСТАЧИВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2078649C1 |

Изобретение относится к специализированным расточным станкам для восстановления или ремонта изделий. Станок содержит цилиндрический корпус, внутри которого размещен червячный редуктор, включающий в себя ведущий вал, установленный на подшипниках, с закрепленным на нем червячным колесом, связанным зубчатой передачей с червячным валом, установленным в призматическом корпусе, закрепленном на внешней поверхности цилиндрического корпуса станка. На торцах ведущего вала консольно закреплены две борштанги, каждая из которых снабжена распоркой, блоком автоматической продольной подачи, выполнена в виде трубы с продольным пазом, внутри которой на гайке установлен ходовой винт, снабженный маховиком ручной подачи. На ходовой винт каждой из борштанг навинчен резцедержатель с возможностью закрепления в нем резца, выполненный в виде втулки с резьбовым сердечником и внутренними поперечными ребрами, совмещенными с продольным пазом трубы. На призматическом корпусе закреплен сервопривод, ведущий вал которого соединен с червячным валом. К сервоприводу подключен силовой выход блока управления станком, выполненного на основе микроконтроллера, а к его измерительным входам подключены выходы концевых датчиков, закрепленных на торцах цилиндрического корпуса и распорках. Обеспечивается расточка горловины остова и вкладышей моторно-осевых подшипников тяговых электродвигателей. 5 з.п. ф-лы, 5 ил.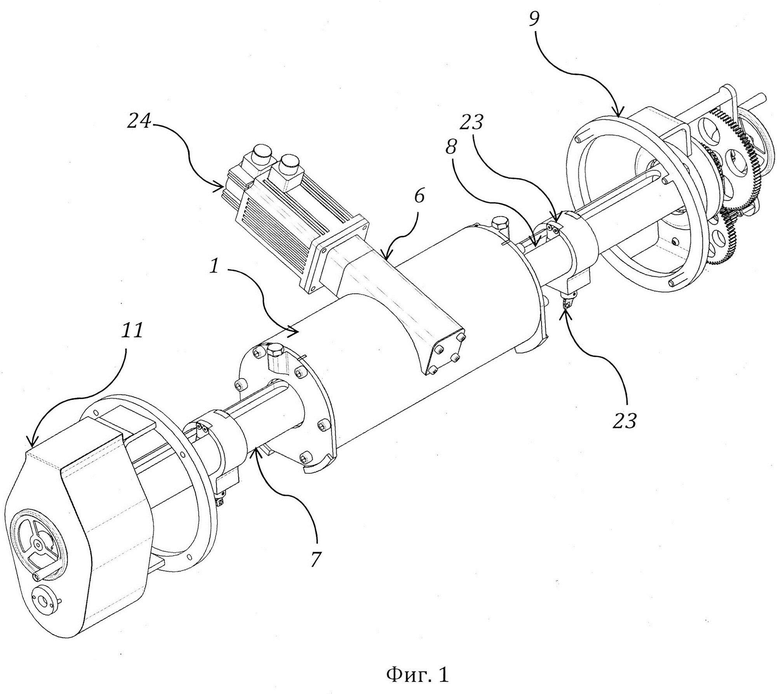
1. Мобильный расточной станок, содержащий цилиндрический корпус, внутри которого размещен червячный редуктор, включающий в себя ведущий вал, установленный на подшипниках с закрепленным на нем червячным колесом, связанным зубчатой передачей с червячным валом, установленным в призматическом корпусе, который закреплен на внешней поверхности цилиндрического корпуса, отличающийся тем, что на торцах ведущего вала консольно закреплены две борштанги, каждая из которых выполнена в виде трубы с продольным пазом, на конце которой на внешней поверхности на подшипнике установлена распорка, а на торце упомянутой трубы закреплена ведущая шестерня двухступенчатого редуктора блока автоматической продольной подачи, закрытого кожухом, при этом внутри трубы на гайке установлен ходовой винт с маховиком ручной подачи и с закрепленными ведомой шестерней редуктора блока автоматической продольной подачи и кронштейном, выполненным в виде планки, на концах которой закреплены оси, на первой из которых установлена подвижная в осевом направлении зубчатая муфта, выполненная заодно с втулкой и находящаяся в постоянном зацеплении с ведомой шестерней, и промежуточная шестерня, находящаяся в зацеплении с ведущей шестерней, причем на втулке зубчатой муфты и на ступице промежуточной шестерни выполнены зубчатые венцы, образующие разъемное соединение для передачи крутящего момента от промежуточной шестерни к ведомой шестерне, при этом на ходовой винт каждой из борштанг навинчен резцедержатель с возможностью закрепления в нем резца и выполнен в виде втулки с резьбовым сердечником и внутренними поперечными ребрами, совмещенными с продольным пазом трубы, а на призматическом корпусе закреплен сервопривод, ведущий вал которого соединен с червячным валом, причем к сервоприводу подключен силовой выход блока управления станком, выполненного на основе микроконтроллера, а к его измерительным входам подключены выходы концевых датчиков, закрепленных на торцах цилиндрического корпуса и распорках.
2. Мобильный расточной станок по п. 1, отличающийся тем, что червячный редуктор выполнен с передаточным отношением 20.
3. Мобильный расточной станок по п. 1, отличающийся тем, что в качестве сервопривода использован сервопривод постоянного тока с двигателем мощностью 1,5 кВт.
4. Мобильный расточной станок по п. 1, отличающийся тем, что силовой выход выполнен на основе тиристорных ключей.
5. Мобильный расточной станок по п. 1, отличающийся тем, что силовой выход выполнен на основе транзисторных ключей.
6. Мобильный расточной станок по п. 1, отличающийся тем, что в качестве микроконтроллера применена микросхема, основанная на микропроцессорном ядре ARM7TDMI-S, работающем на частоте 180 МГц.
| Способ приготовления водных эмульсий каучука | 1935 |
|
SU46696A1 |
| Расточное устройство | 1987 |
|
SU1532204A1 |
| Механический гранулятор кормов | 1961 |
|
SU143305A1 |
| Способ контроля рафинации жиров | 1958 |
|
SU126973A1 |
| US 4652186 A1, 24.03.1987. | |||

