Изобретение относится к технике электросвязи и может быть использовано в приемниках сигналов радиоуправления и радиолокационных станций, системах подвижной связи.
В качестве аналога выбрано устройство для подавления шума в системе связи и способ реализованный в данном устройстве (патент РФ RU 2169992 С2 «Способ и устройство для подавления шума в системе связи», опубликован 27.06.2001). Устройство предназначено для передачи информации с использованием информационных кадров в каналах, причем информационные кадры содержат шум, из которого получают оценку шума канала, содержащее средство для оценки энергии канала в текущем информационном кадре, средство для оценки полной энергии канала в текущем информационном кадре на основе оценки энергии канала, средство для оценки мощности спектров текущего информационного кадра на основе оценки энергии канала, средство для оценки мощности спектров множества прошедших информационных кадров на основе оценки мощности спектров текущего кадра, средство для определения отклонения между оценкой мощности спектров текущего кадра и оценкой мощности спектров множества прошедших кадров и средство для обновления оценки шума канала на основе оценки полной энергии канала и полученного отклонения. Рассматриваемое устройство также содержит блоки корреляционной обработки, однако обработка сигнала проводится в предположении, что в канале присутствует только шум, структурные же помехи не учитываются, что не позволяет получить требуемый технический результат в виде решения о том, какие сигналы присутствуют на входе устройства.
Известно устройство различения сигналов на фоне произвольной помехи (Авторское свидетельство СССР №1596469, кл. Н04В 15/00, опубликовано 01.06.1990), и способ различения сигналов на фоне произвольной помехи, реализованный в данном устройстве, который заключается в том, что осуществляют корреляционную обработку смеси отсчетов входного сигнала и произвольной помехи U с учетом ее полигауссового представления для каждого из N гауссовского случайного процесса. Для более точного представления полигауссовой помехи формируют линейные комбинации yil результата корреляционной обработки xin. Для принятия решении о принадлежности сигнала тому или иному пользователю находят максимальное значение из xin и yil для каждого гауссовского случайного процесса.
Устройство различения сигналов на фоне произвольной помехи содержит блок сравнения, блоки корреляционной обработки сигналов, блоки суммирования, тактовый генератор, и блоки выбора максимального сигнала.
Таким образом, наиболее близкими техническими решениями к предлагаемым способу и устройству является устройство-прототип (Авторское свидетельство СССР №1596469, кл. Н04В 15/00, опубликовано 01.06.1990) и способ, реализованный в данном устройстве.
Недостатком данного устройства-прототипа и способа, реализуемого в данном устройстве, является то, что обработку входного вектора отсчетов Uk,  осуществляют без учета имеющейся на приемной стороне информации об уровне и структуре внутрисистемных помех, характерных для любых систем множественного доступа, что снижает верность принятия решения о передаваемых сигналах.
осуществляют без учета имеющейся на приемной стороне информации об уровне и структуре внутрисистемных помех, характерных для любых систем множественного доступа, что снижает верность принятия решения о передаваемых сигналах.
Решаемая техническая задача (технический результат) заключается в повышении верности приема сигналов при действии внутрисистемных помех.
Технический результат в предлагаемом способе разделения сигналов при действии внутрисистемных помех, заключающемся в том, что над вектором отсчетов смеси входного сигнала и произвольной помехи Uk в виде k отсчетов,  в каждом
в каждом  канале обработки сигналов осуществляют корреляционную обработку с учетом ее полигауссового представления для каждого из N гауссовского случайного процесса, в результате получают мягкие статистики предварительных решений о сигналах в виде:
канале обработки сигналов осуществляют корреляционную обработку с учетом ее полигауссового представления для каждого из N гауссовского случайного процесса, в результате получают мягкие статистики предварительных решений о сигналах в виде:

находят максимальное значение результата корреляционной обработки xi=maxxin по каждой гауссовской компоненте полигауссового разложения суммарной помехи, достигается тем, что на основе сравнения максимальных значений результата корреляционной обработки xi с пороговым значением с0 определяют текущую комбинацию различаемых опорных сигналов  согласно правилу
согласно правилу

над вектором значений  осуществляют линейное преобразование в виде перемножения инверсной симметричной матрицы кросс-корреляции опорных сигналов R, смещенных на значения вклада фонового шума σ2А-2, находят максимальное значение каждого элемента полученного результата и сравнивают его с пороговым значением с1 для принятия решения об опорном сигнале Si в соответствии с решающим правилом:
осуществляют линейное преобразование в виде перемножения инверсной симметричной матрицы кросс-корреляции опорных сигналов R, смещенных на значения вклада фонового шума σ2А-2, находят максимальное значение каждого элемента полученного результата и сравнивают его с пороговым значением с1 для принятия решения об опорном сигнале Si в соответствии с решающим правилом:

где Si - опорный сигнал; L - матрица линейного преобразования; R - матрица кросс-корреляции опорных сигналов, включенная в матрицу линейного преобразования; σ2 - дисперсия помехи; А - диагональная матрица, элементы которой соответствуют энергиям принятых сигналов пользователей;  - комбинация значений результата корреляционной обработки предварительных решений о сигналах; c1 - пороговое значение.
- комбинация значений результата корреляционной обработки предварительных решений о сигналах; c1 - пороговое значение.
Технический результат в предлагаемом устройстве разделения сигналов при действии внутрисистемных помех, содержащем  каналов обработки сигналов, каждый из которых включает блок корреляционной обработки и блок выбора максимального сигнала; тактовый генератор, причем входы блоков корреляционной обработки являются входами устройства, а тактовый генератор соединен с каждым блоком корреляционной обработки и каждым блоком выбора максимального сигнала каждого канала обработки сигналов соответственно, входы блока выбора максимального сигнала соединены с выходами блока корреляционной обработки соответственно для каждого канала обработки сигналов, достигается тем, что введены блок фильтрации каналов, являющийся общим для всех каналов обработки сигналов, и блоки линейного преобразования, каждый из которых включен в состав каждого канала обработки сигналов, так, что входы блока фильтрации каналов соединены с соответствующими выходами каждого блока выбора максимального сигнала для каждого канала обработки сигналов соответственно, а выходы блока фильтрации каналов соединены со входами каждого блока линейного преобразования каждого канала обработки сигналов соответственно, причем выход тактового генератора соединен со входом блока фильтрации каналов и входом каждого блока линейного преобразования для каждого канала обработки сигналов соответственно.
каналов обработки сигналов, каждый из которых включает блок корреляционной обработки и блок выбора максимального сигнала; тактовый генератор, причем входы блоков корреляционной обработки являются входами устройства, а тактовый генератор соединен с каждым блоком корреляционной обработки и каждым блоком выбора максимального сигнала каждого канала обработки сигналов соответственно, входы блока выбора максимального сигнала соединены с выходами блока корреляционной обработки соответственно для каждого канала обработки сигналов, достигается тем, что введены блок фильтрации каналов, являющийся общим для всех каналов обработки сигналов, и блоки линейного преобразования, каждый из которых включен в состав каждого канала обработки сигналов, так, что входы блока фильтрации каналов соединены с соответствующими выходами каждого блока выбора максимального сигнала для каждого канала обработки сигналов соответственно, а выходы блока фильтрации каналов соединены со входами каждого блока линейного преобразования каждого канала обработки сигналов соответственно, причем выход тактового генератора соединен со входом блока фильтрации каналов и входом каждого блока линейного преобразования для каждого канала обработки сигналов соответственно.
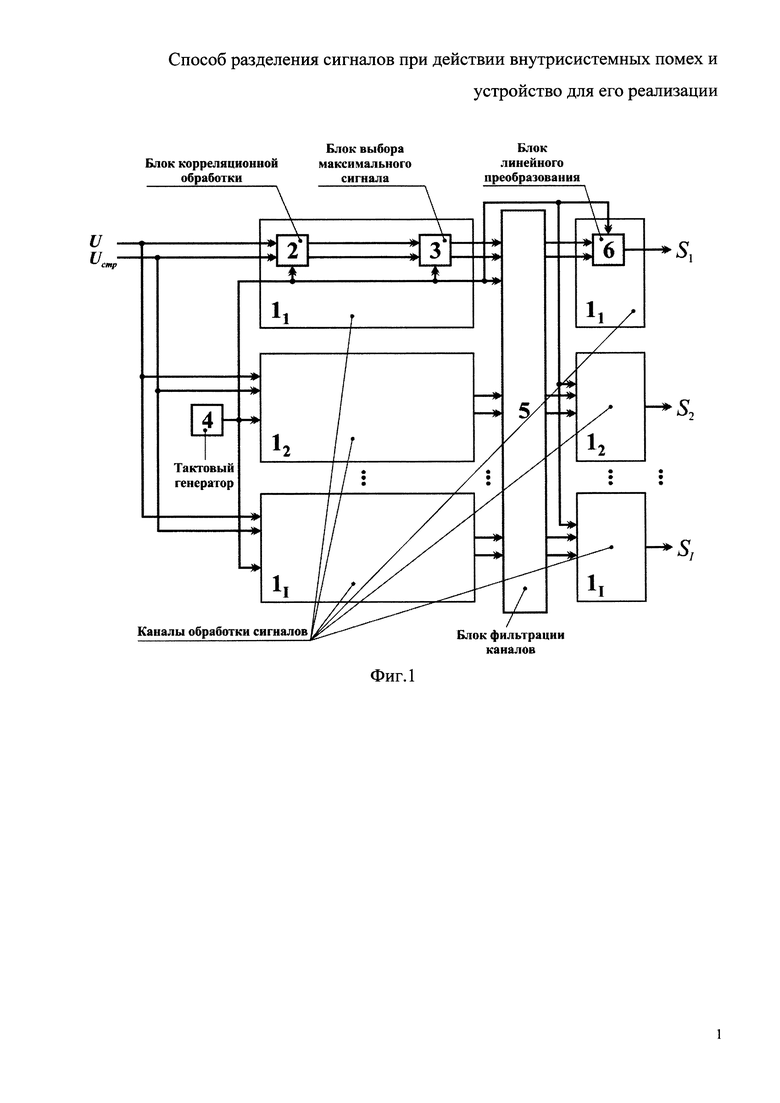
На фиг. 1 показана общая схема устройства разделения сигналов при действии внутрисистемных помех.
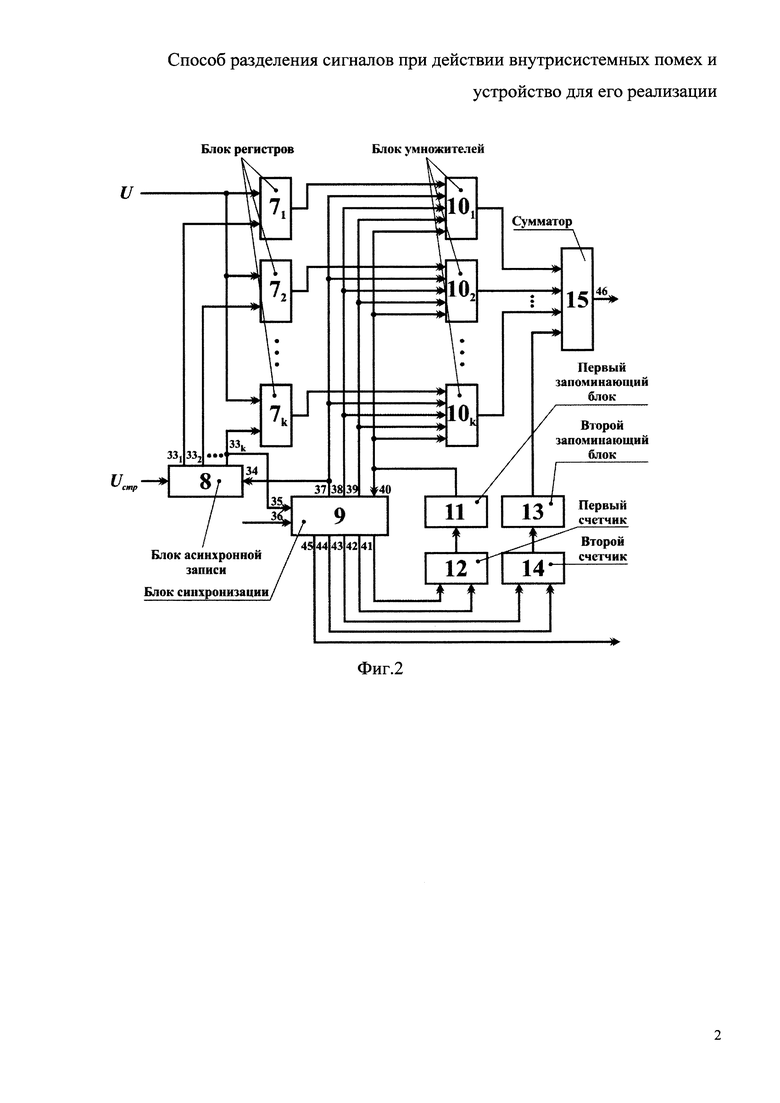
На фиг. 2 - схемное решение блока корреляционной обработки, пример конкретной реализации.
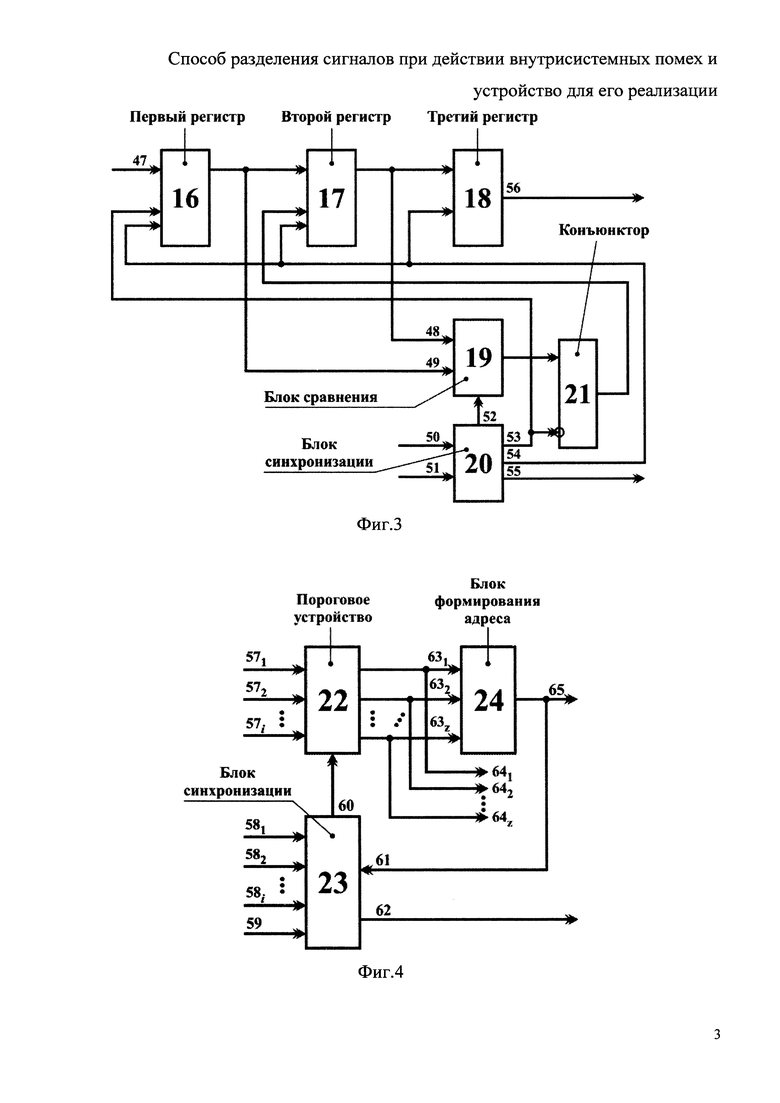
На фиг. 3 - схемное решение блока выбора максимального сигнала, пример конкретной реализации.
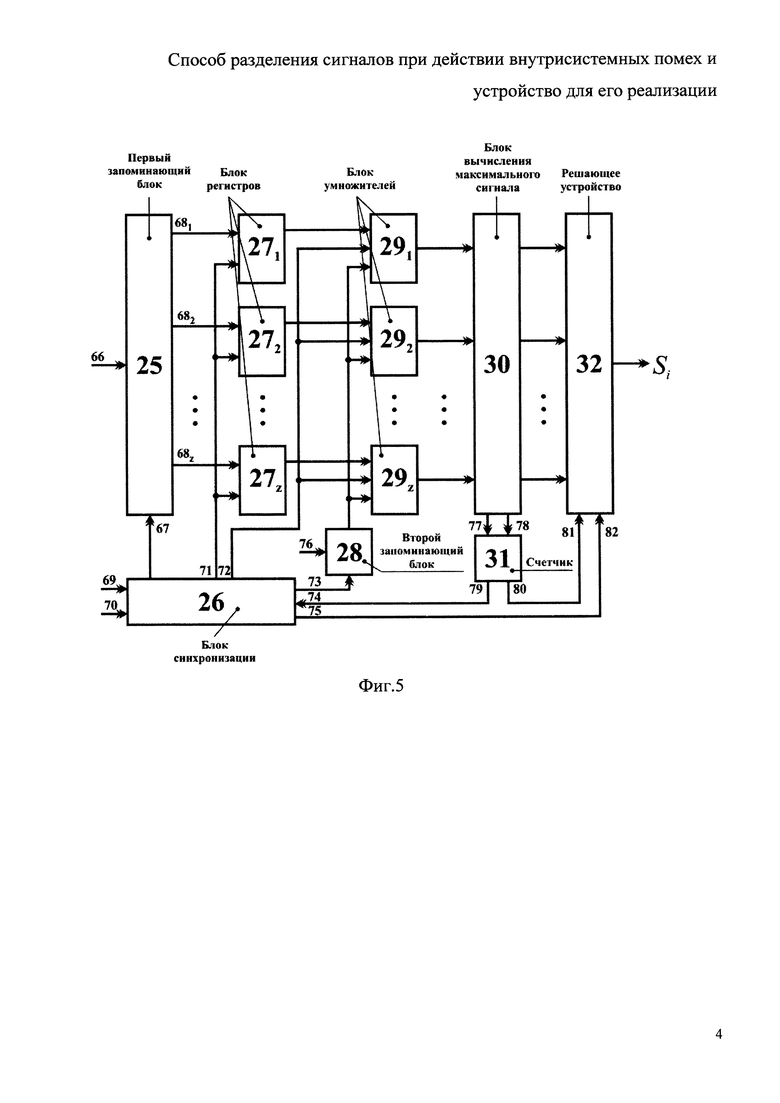
На фиг. 4 - схемное решение блока фильтрации каналов, который является общим для всех каналов обработки сигналов, пример конкретной реализации.
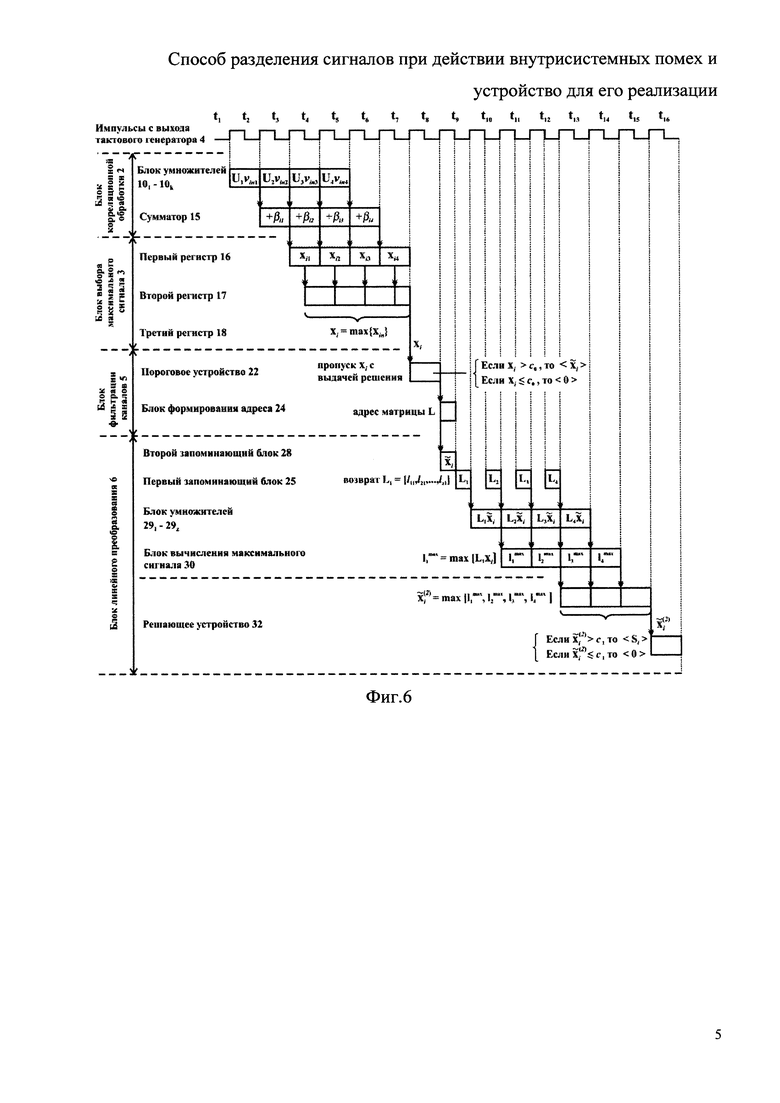
На фиг. 5 показана схема блока линейного преобразования, пример конкретной реализации.
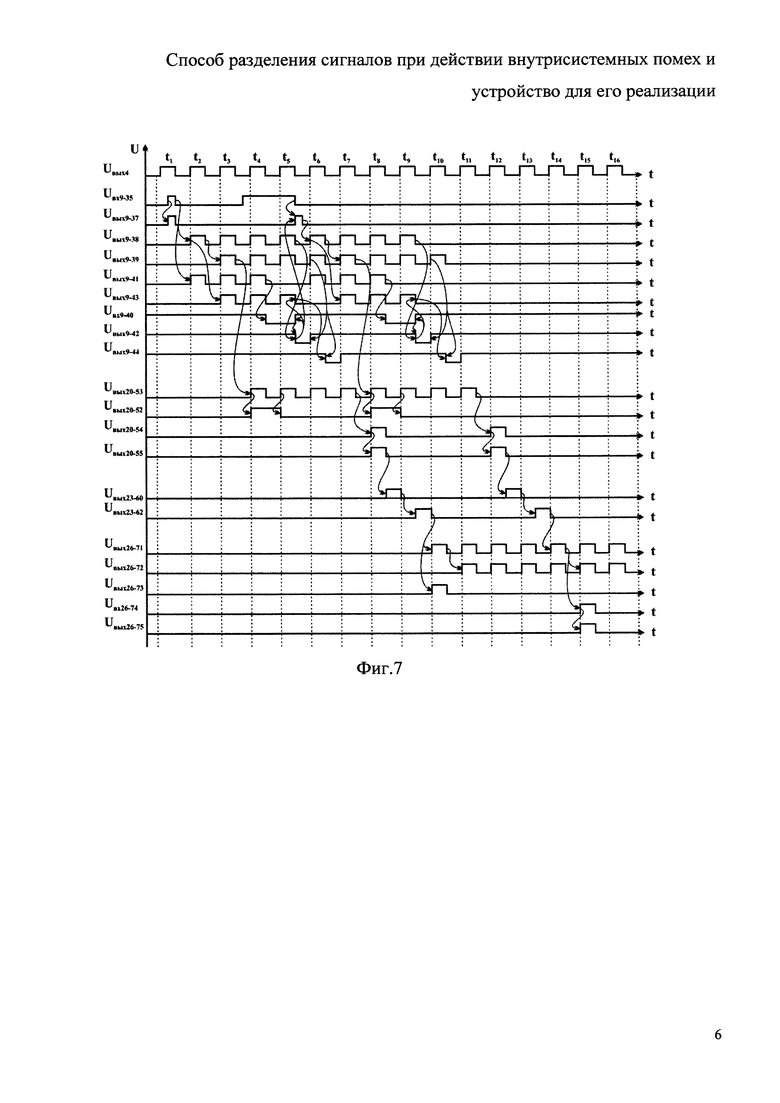
На фиг. 6-фиг. 7 показаны временные диаграммы для процессов обработки сигнала и синхронизации соответственно.
Рассмотрим подробнее суть принципа компенсации внутрисистемных помех, заложенных в предлагаемый способ разделения сигналов при действии внутрисистемных помех и устройство для его реализации.
Значения выхода блока выбора максимального сигнала xi с учетом влияния внутрисистемных помех, перепишем в виде

где At - амплитуда i-го распознаваемого сигнала, bi - информационный символ i-го сигнала, ρi,m - коэффициент кросс-корреляции опорных сигналов i и m, i≠m, σ - среднеквадратическое отклонение (СКО) произвольной помехи.
В формуле (4) первое слагаемое соответствует вкладу собственного полезного сигнала в отклик приемника i-го распознаваемого сигнала, второе слагаемое - вклад m-х сигналов в отклик приемника i-го распознаваемого сигнала, i≠m, третье слагаемое - шумовой отсчет. Второе слагаемое представляет собой внутрисистемные помехи множественного доступа.
Для борьбы с внутрисистемными помехами с известной структурой предлагается использовать линейное преобразование над вектором xi выходных значений, Lxi [см. например, S. Verdu. Multiuser Detection. - Cambr. Univ. Press: Cambridge, CB2. 2RU, UK. 1998, страницы 291-295] заключающееся в инверсии суммарной матрицы R+σ2A-2, где R - квадратная симметричная матрица кросс-корреляции опорных сигналов пользователей размером I×I, составленная из коэффициентов ρi,m, которые вычисляют по формуле

σ2 - дисперсия произвольной помехи со спектральной плотностью мощности N0/2, A=diag(A1, А2, …, AI) - диагональная матрица, элементы которой соответствуют энергиям принятых сигналов пользователей, Si - опорный сигнал. Например, в системах подвижной связи с кодовым разделением каналов и прямым расширением спектра опорный сигнал может представлять собой последовательность двоичных символов длиной 32 или 64. В зависимости от применяемого типа микросхем значение напряжения, соответствующее логической единице может быть равно 0,4-5 В.
Таким образом, переписав (4) в матричном виде xi=max{xin}=RAb+σ, получим

В случае если произвольная помеха стремится к нулю, т.е. σ2→0, то Lxi=R-1RAb=IAb, где I - единичная матрица. Таким образом получим оптимальные решения по передаваемому вектору информационной посылки, взвешенному амплитудами различаемого сигнала. Именно таким образом компенсируют влияние внутрисистемных помех.
Устройство разделения сигналов при действии внутрисистемных помех содержит i,  каналов обработки сигналов 11-1i, каждый из которых включает блок корреляционной обработки 2 и блок выбора максимального сигнала 3; тактовый генератор 4, причем входы блоков корреляционной обработки 2 являются входами устройства, а тактовый генератор 4 соединен с каждым блоком корреляционной обработки 2 и каждым блоком выбора максимального сигнала 3 каждого канала обработки сигналов 11-1i соответственно, входы блока выбора максимального сигнала 3 соединены с выходами блока корреляционной обработки 2 соответственно для каждого канала обработки сигналов 11-1i, блок фильтрации каналов 5, являющийся общим для всех каналов обработки сигналов 11-1i, и блоки линейного преобразования 6, каждый из которых включен в состав каждого канала обработки сигналов 11-1i, так, что входы блока фильтрации каналов 5 соединены с соответствующими выходами каждого блока выбора максимального сигнала 3 для каждого канала обработки сигналов 11-1i соответственно, а выходы блока фильтрации каналов 5 соединены со входами каждого блока линейного преобразования 6 каждого канала обработки сигналов 11-1i соответственно, причем выход тактового генератора 4 соединен со входом блока фильтрации каналов 5 и входом каждого блока линейного преобразования 6 для каждого канала обработки сигналов 11-1i соответственно.
каналов обработки сигналов 11-1i, каждый из которых включает блок корреляционной обработки 2 и блок выбора максимального сигнала 3; тактовый генератор 4, причем входы блоков корреляционной обработки 2 являются входами устройства, а тактовый генератор 4 соединен с каждым блоком корреляционной обработки 2 и каждым блоком выбора максимального сигнала 3 каждого канала обработки сигналов 11-1i соответственно, входы блока выбора максимального сигнала 3 соединены с выходами блока корреляционной обработки 2 соответственно для каждого канала обработки сигналов 11-1i, блок фильтрации каналов 5, являющийся общим для всех каналов обработки сигналов 11-1i, и блоки линейного преобразования 6, каждый из которых включен в состав каждого канала обработки сигналов 11-1i, так, что входы блока фильтрации каналов 5 соединены с соответствующими выходами каждого блока выбора максимального сигнала 3 для каждого канала обработки сигналов 11-1i соответственно, а выходы блока фильтрации каналов 5 соединены со входами каждого блока линейного преобразования 6 каждого канала обработки сигналов 11-1i соответственно, причем выход тактового генератора 4 соединен со входом блока фильтрации каналов 5 и входом каждого блока линейного преобразования 6 для каждого канала обработки сигналов 11-1i соответственно.
Блок корреляционной обработки 2, входящий в состав каждого канала обработки сигналов 11-1i, изображенный на фиг. 2, содержит блоки регистров 71-7k в количестве k штук, блок асинхронной записи 8, блок синхронизации 9, блоки умножителей 101-10k в количестве k штук, первый запоминающий блок 11, первый счетчик 12, второй запоминающий блок 13, второй счетчик 14 и сумматор 15. Блок корреляционной обработки 2 полностью повторяет схемное решение блока корреляционной обработки устройства-прототипа.
Блок выбора максимального сигнала 3, входящий в состав первой части каждого канала обработки сигналов 11-1i, изображен на фиг. 3 и содержит первый 16, второй 17 и третий 18 регистры, блок сравнения 19, блок синхронизации 20 и конъюнктор 21. Блок выбора максимального сигнала 3 полностью повторяет схемное решение блока выбора максимального сигнала устройства-прототипа.
Тактовый генератор 4 имеет стандартную реализацию, описанную в литературе.
Блок фильтрации каналов 5, изображенный на фиг. 4 и являющийся общим для всех каналов обработки сигналов 11-1i, содержит пороговое устройство 22, выполняющее роль фильтра сигналов, блок синхронизации 23 и блок формирования адреса 24.
Блок линейного преобразования 6, содержащийся во второй части каждого канала обработки сигналов 11-1i и изображенный на фиг. 5, состоит из первого запоминающего блока 25, блока синхронизации 26, блоков регистров 271-27z, второго запоминающего блока 28, блоков умножителей 291-29z, блока вычисления максимального сигнала 30, счетчика 31 и решающего устройства 32.
На фиг. 1 - фиг. 5 введены следующие обозначения: 331-33k - выходы блока асинхронной записи 8; 34 - второй вход блока асинхронной записи 8; 35, 36 - первый и второй входы блока синхронизации 9 соответственно; 37-39 - первый - третий выходы блока синхронизации 9 соответственно, 40 - третий вход блока синхронизации 9; 41-45 - четвертый - восьмой выходы блока синхронизации 9 соответственно; 46 - выход сумматора 15; 47 - первый вход первого регистра 16; 48, 49 - первый и второй входы блока сравнения 19 соответственно, 50, 51 - первый и второй входы блока синхронизации 20 соответственно, 52-55 - первый - четвертый выходы блока синхронизации 20 соответственно; 56 - выход третьего регистра 18; 571-57i - входы порогового устройства 22; 581-58i - первые i-входов блока синхронизации 23; 59-(i+1)-й входов вход блока синхронизации 23; 60 -первый выход блока синхронизации 23; 61-(i+2)-й вход блока синхронизации 23; 62 - второй выход блока синхронизации 23; 631-63z - входы блока формирования адреса 24; 641-64z - выходы порогового устройства 22; 65 - выход блока формирования адреса 24; 66, 67 - первый и второй входы первого запоминающего блока 25 соответственно, 681-68z - выходы первого запоминающего блока 25; 69, 70 - первый и второй входы блока синхронизации 26 соответственно; 71-73 - второй-четвертый выходы блока синхронизации 26 соответственно; 74 - третий вход блока синхронизации 26; 75 - пятый выход блока синхронизации 26, 76 - первый вход второго запоминающего блока 28; 77, 78 - первый и второй входы счетчика 31 соответственно; 79, 80 - первый и второй выходы счетчика 31 соответственно; 81, 82-(z+1)-й и (z+2)-й входы решающего устройства 32 соответственно.
Элементарные блоки, входящие в состав устройства разделения сигналов при действии внутрисистемных помех имеют стандартную реализацию, описанную в литературе и имеют систему электропитания.
Рассмотрим принцип работы устройства разделения сигналов при действии внутрисистемных помех и осуществление предлагаемого способа.
На вход первой части каналов обработки 11-1i, т.е. в блок корреляционной обработки 2, поступает входной сигнал U вместе с сигналом стробирования Uстр (см. фиг. 1). Входной сигнал представляет собой сумму полезных информационных сигналов, внутрисистемных помех и прочих шумов и произвольных помех различной природы (например, теплового шума от смежных узлов приемного устройства, преднамеренных и индустриальных импульсных помех) в виде k отсчетов,  К ∈ множеству натуральных чисел. Каждый отсчет входного информационного сигнала, Uk, представляет собой m-разрядный двоичный код. Максимальное количество отсчетов К выбирают исходя из теоремы Котельникова и с учетом требуемой точности аппроксимации смеси входного сигнала и произвольной помехи. Количество каналов обработки
К ∈ множеству натуральных чисел. Каждый отсчет входного информационного сигнала, Uk, представляет собой m-разрядный двоичный код. Максимальное количество отсчетов К выбирают исходя из теоремы Котельникова и с учетом требуемой точности аппроксимации смеси входного сигнала и произвольной помехи. Количество каналов обработки  I ∈ множеству натуральных чисел, подбирают исходя из максимального количества различаемых сигналов (например, количества одновременно обслуживаемых абонентов в системах подвижной связи на одной базовой станции. На примере конкретной реализации I может быть равно 64).
I ∈ множеству натуральных чисел, подбирают исходя из максимального количества различаемых сигналов (например, количества одновременно обслуживаемых абонентов в системах подвижной связи на одной базовой станции. На примере конкретной реализации I может быть равно 64).
Статистические параметры суммарной помехи [внутрисистемной, индустриальной и проч.], описывают функционалом плотности распределения вероятности в полигауссовом виде [см., например, Чабдаров Ш.М., Трофимов А.Т. Полигауссовы представления произвольных помех и прием дискретных сигналов // Радиотехника и электроника. 1975, Т. 20, №4, с. 734-735 или Чабдаров Ш.М. Оптимальный прием дискретных сигналов при комплексе шумовых и импульсных помех // Радиотехника и электроника. 1977, Т. 22, №6, с. 1162-1166], т.е. как взвешенную сумму частных плотностей вероятности для каждого гауссовского случайного процесса:

где N - число гауссовских случайных процессов с различными корреляционными матрицами и математическими ожиданиями помехи mn, qn - взвешивающие сомножители, имеющие смысл дискретных распределений вероятности и удовлетворяющими условиям нормировки  для каждой гауссовской компоненты, wm(U) - частные плотности вероятности для n-й гауссовской компоненты. Максимальное количество гауссовских компонент N выбирают из соображений требуемой точности аппроксимации суммарной помехи и
для каждой гауссовской компоненты, wm(U) - частные плотности вероятности для n-й гауссовской компоненты. Максимальное количество гауссовских компонент N выбирают из соображений требуемой точности аппроксимации суммарной помехи и  N ∈ множеству натуральных чисел. На примере конкретной реализации N=3 обеспечивает точность аппроксимации порядка 95%. Предполагается, что параметры полигауссовой помехи в (7) известны до начала работы предлагаемого устройства разделения сигналов при действии внутрисистемных помех и способа, реализующего данное устройство. На примере конкретной реализации параметры полигауссовой помехи могут принимать следующие значения для n=4: q1=0.2,, q2=0.3, q3=0.3, q4=0.2, а частные плотности распределения вероятности для одного из k отсчетов - w1=0.0045 B-1, w2=0.0052 В-1, w3=0.0058 В-1, w4=0.0047 В-1.
N ∈ множеству натуральных чисел. На примере конкретной реализации N=3 обеспечивает точность аппроксимации порядка 95%. Предполагается, что параметры полигауссовой помехи в (7) известны до начала работы предлагаемого устройства разделения сигналов при действии внутрисистемных помех и способа, реализующего данное устройство. На примере конкретной реализации параметры полигауссовой помехи могут принимать следующие значения для n=4: q1=0.2,, q2=0.3, q3=0.3, q4=0.2, а частные плотности распределения вероятности для одного из k отсчетов - w1=0.0045 B-1, w2=0.0052 В-1, w3=0.0058 В-1, w4=0.0047 В-1.
На выходе блока корреляционной обработки 2 формируют сигнал, пропорциональный смещенному коэффициенту корреляции в виде, описанном в авторском свидетельстве на устройство-прототип:

где  - значение опорного сигнала, смещенного на математическое ожидание помехи mn, Pi - априорные вероятности передачи опорных различаемых сигналов Si,
- значение опорного сигнала, смещенного на математическое ожидание помехи mn, Pi - априорные вероятности передачи опорных различаемых сигналов Si,  и появления произвольной помехи, относящиеся к n-му гауссовскому процессу. Pi - безразмерные величины и не превышающее l, mn имеет аналогичную размерность, что и опорные сигналы, например В или мВ.
и появления произвольной помехи, относящиеся к n-му гауссовскому процессу. Pi - безразмерные величины и не превышающее l, mn имеет аналогичную размерность, что и опорные сигналы, например В или мВ.
Значения сигнала xin с выхода каждого блока корреляционной обработки 2 поступают на блок выбора максимального сигнала 3.
Блок выбора максимального сигнала 3 в свою очередь осуществляет выбор максимального значения сигнала, пропорциональный максимальному из смещенных коэффициентов корреляции по каждой гауссовской компоненте xin. Таким образом, на выходе блока выбора максимального сигнала 3 получают значения xi=max{xin}.
Значения xi первой части каналов обработки сигналов 11-1i далее поступают в блок фильтрации каналов 5. В блоке фильтрации каналов 5 определяют текущую комбинацию различаемых опорных сигналов  по следующему правилу:
по следующему правилу:

где с0 - порог сравнения. Значение порога устанавливают исходя из известной на приемной стороне оценки амплитуды сигнала и произвольной помехи Ai+σ, например, в частном случае, с0=Ai.
На основе выполнения первого условия правила (9) формируют адрес оператора линейного преобразования, соответствующий полученной комбинации сигналов  каналов обработки, который считывают в блоке линейного преобразования 6. Каждой комбинации сигналов соответствует свой адрес в виде r-разрядного двоичного кода, такого, что 2r≥I, где r ∈ множеству натуральных чисел начиная с 1. Блок формирования адреса 24 имеет стандартную схему, опубликованную в литературе. За основу схемного решения блока формирования адреса 24 можно взять, например, авторское свидетельство SU 1383350 А1 «Программное устройство для формирования адресов», опубликованное 23.03.1988.
каналов обработки, который считывают в блоке линейного преобразования 6. Каждой комбинации сигналов соответствует свой адрес в виде r-разрядного двоичного кода, такого, что 2r≥I, где r ∈ множеству натуральных чисел начиная с 1. Блок формирования адреса 24 имеет стандартную схему, опубликованную в литературе. За основу схемного решения блока формирования адреса 24 можно взять, например, авторское свидетельство SU 1383350 А1 «Программное устройство для формирования адресов», опубликованное 23.03.1988.
Непосредственно в блоке линейного преобразования 6 в соответствии с полученным адресом осуществляют считывание оператора линейного преобразования L=(R+σ2A-2)-1 в виде инверсной симметричной матрицы кросс-корреляции опорных сигналов R, смещенных на значения вклада фонового шума σ2А-2:
где  - транспонированная матрица алгебраических дополнений соответствующих элементов матрицы М=(R+σ2A-2). Элементы в матрице (10) являются безразмерными величинами и могут принимать значения в пределах динамического диапазона сигналов и помех, например от -5 до 5. Значения оператора линейного преобразования L для каждой комбинации
- транспонированная матрица алгебраических дополнений соответствующих элементов матрицы М=(R+σ2A-2). Элементы в матрице (10) являются безразмерными величинами и могут принимать значения в пределах динамического диапазона сигналов и помех, например от -5 до 5. Значения оператора линейного преобразования L для каждой комбинации  предполагаются известными до начала работы предлагаемого способа и устройства. В формуле (10) представлен один из способов выполнения инверсии матрицы с использованием матрицы алгебраических дополнений.
предполагаются известными до начала работы предлагаемого способа и устройства. В формуле (10) представлен один из способов выполнения инверсии матрицы с использованием матрицы алгебраических дополнений.
После этого выполняют поэлементное перемножение значений  с L=М-1 (на блоках умножителей 291-29z), т.е. линейное преобразование
с L=М-1 (на блоках умножителей 291-29z), т.е. линейное преобразование  , что обеспечивает компенсацию влияния внутрисистемных помех, содержащихся в
, что обеспечивает компенсацию влияния внутрисистемных помех, содержащихся в  . Далее производят выбор максимального значения из данных элементов (блок вычисления максимального сигнала 30 и решающее устройство 32) и принимают решение о наличии соответствующего различаемого опорного сигнала Si (решающее устройство 32). Таким образом в блоке вычисления максимального сигнала 30 и решающем устройстве 32 последовательно реализован следующий алгоритм принятия решения о различаемых сигналах:
. Далее производят выбор максимального значения из данных элементов (блок вычисления максимального сигнала 30 и решающее устройство 32) и принимают решение о наличии соответствующего различаемого опорного сигнала Si (решающее устройство 32). Таким образом в блоке вычисления максимального сигнала 30 и решающем устройстве 32 последовательно реализован следующий алгоритм принятия решения о различаемых сигналах:
Выбор максимального значения элементов матрицы  , т.е.
, т.е.
Сравнение выбранного максимального значения с порогом с1 и принятие решения о наличии соответствующего различаемого сигнала
Если 
Если  ,
,
причем значение порога с1 устанавливают исходя из следующего неравенства Ai≤с1≤с0.
Устройство разделения сигналов при действии внутрисистемных помех работает в параллельно-конвейерном режиме в соответствии со следующими временными циклами.
Первую операцию осуществляют в блоках умножителей 101-10k блока корреляционной обработки 2 сигнала для каждого канала обработки сигналов 11-1i последовательно для каждой гауссовской компоненты  полигауссового представления суммарной произвольной помехи.
полигауссового представления суммарной произвольной помехи.
Вторую операцию  осуществляют на сумматоре 15 также последовательно для каждой гауссовской компоненты со сдвигом на один такт синхронизации по отношению к началу выполнения первой операции, где βin - коэффициент смещения согласно (1).
осуществляют на сумматоре 15 также последовательно для каждой гауссовской компоненты со сдвигом на один такт синхронизации по отношению к началу выполнения первой операции, где βin - коэффициент смещения согласно (1).
Третью операцию xi=max{xin} осуществляют в блоке выбора максимального сигнала 3 со сдвигом на два с половиной такта синхронизации относительно первой операции.
Четвертую операцию - определение предварительной комбинации различаемых опорных сигналов  и выбор соответствующего адреса матрицы L осуществляют в блоке фильтрации каналов 5 со сдвигом на шесть тактов относительно первой операции.
и выбор соответствующего адреса матрицы L осуществляют в блоке фильтрации каналов 5 со сдвигом на шесть тактов относительно первой операции.
Пятую операцию умножения L и  осуществляют на блоках умножителей 291-29z блока линейного преобразования 6 для каждого канала обработки сигналов 11-1i со сдвигом на восемь тактов относительно первой операции.
осуществляют на блоках умножителей 291-29z блока линейного преобразования 6 для каждого канала обработки сигналов 11-1i со сдвигом на восемь тактов относительно первой операции.
Шестую операцию - выбор максимального значения из элементов  ,
,  и принятие решения о действующих опорных сигналах Si выполняют в блоке вычисления максимального сигнала 30 и решающем устройстве 32 блока линейного преобразования 6 каждого канала обработки сигналов 11-1i со сдвигом на девять и четырнадцать тактов относительно начала первой операции.
и принятие решения о действующих опорных сигналах Si выполняют в блоке вычисления максимального сигнала 30 и решающем устройстве 32 блока линейного преобразования 6 каждого канала обработки сигналов 11-1i со сдвигом на девять и четырнадцать тактов относительно начала первой операции.
Для оптимизации времени выполнения шестой операции, поиск максимального значения  производят как в блоке вычисления максимального сигнала 30, так и решающем устройстве 32.
производят как в блоке вычисления максимального сигнала 30, так и решающем устройстве 32.
Блоки синхронизации 9, 20, 23, 26 синхронизированы от тактового генератора 4 и формируют управляющие и синхронизирующие импульсы, посредством которых организуют работу блоков корреляционной обработки 2, блоков выбора максимального сигнала 3, блока фильтрации каналов 5 и блоков линейного преобразования 6 для каждого канала обработки сигналов 11-1i.
Рассмотрим динамику работы устройства в целом с момента его включения. Работу блоков устройства будем рассматривать по временным диаграммам, приведенным на фиг. 6-фиг. 7.
Отсчеты смеси входного сигнала и произвольной помехи Uk, поступающие на информационные входы блоков корреляционной обработки 2 первой части каждого канала обработки сигналов 11-1I с помощью блока асинхронной записи 8, записывают в блоки регистров 71-7k по стробирующим импульсам Uстр. Блок асинхронной записи 8 на выходах 331-33k формирует импульсы, которые последовательно поступают на синхровходы блоков регистров 71-7k соответственно. При записи последнего k-го отсчета первый вход блока асинхронной записи 8 блокируется высоким уровнем импульса на выходе 33k, по которому также инициируется работа блока синхронизации 9 (вход 35). Такая организация записи отсчетов смеси входного сигнала и произвольной помехи Uk позволяет совместить ее по времени с дальнейшей обработкой и производить ее асинхронно по отношению к тактовым импульсам по мере поступления отсчетов.
После приема отсчетов смеси входного сигнала и произвольной помехи Uk в интервале t1 на последнем выходе 33k блока асинхронной записи 8 появляется сигнал инициализации, который поступает на первый вход 35 блока синхронизации 9 и проходит на его первый выход 37.
По сигналу с первого выхода 37 блока синхронизации 9 происходит перезапись отсчетов входного сигнала Uk из блоков 71-7k регистров в первые входы блоков умножителей 101-10k соответственно. С началом тактового интервала t2 импульсы тактового генератора 4 проходят на второй 38 и четвертый 41 выходы блока синхронизации 9. По переднему фронту импульса со второго выхода 38 происходит запись значений отсчетов смещенного опорного сигнала νink первой гауссовской компоненты полигауссового представления произвольной помехи из первого запоминающего блока 11 на пятые входы блоков умножителей 101-10k. По заднему фронту импульсов на четвертом выходе 41 блока синхронизации 9 происходит увеличение на единицу содержимого первого счетчика 12, что обеспечивает выдачу отсчетов смещенного опорного сигнала νink из первого запоминающего блока 11 для следующей гауссовской компоненты.
В следующем тактовом интервале t3 импульсы тактового генератора 4 проходят на третий 39 и шестой 43 выходы блока синхронизации 9. По переднему фронту импульсов с третьего выхода 39 происходит выдача произведений Ukνink, полученных в течение предыдущего тактового интервала из блоков умножителей 101-10k в сумматор 15. Кроме того, на последний вход сумматора 15 поступает значение коэффициента смещения βin из второго запоминающего блока 13. В течение половины тактового периода осуществляют суммирование значений Ukνink и βin согласно формулы (8) и выдача результата xin на выход 46 сумматора 15, являющийся выходом блока корреляционной обработки 2. С выдачей последнего значений νink для последней гауссовской компоненты из первого запоминающего блока 11 последний разряд выходной шины этого блока устанавливается в нулевое состояние, что запрещает прохождение тактовых импульсов на четвертый 41 выход блока синхронизации 9. По переднему фронту импульса на его втором выходе 38 происходит умножение вектора отсчетов входного сигнала Uk на вектор отсчетов νink последней гауссовской компоненты, после чего прохождение импульсов тактового генератора 4 со второго выхода 38 блока синхронизации 9 (при условии отсутствия стробирующего импульса на первом входе блока асинхронной записи 8) запрещается.
При наличии стробирующего импульса на первом входе блока асинхронной записи 8 начинается цикл обработки следующего вектора отсчетов Uk непосредственно за прошедшим циклом, и прохождение импульса на второй выход 38 блока синхронизации 9 не запрещается. По заднему фронту этого импульса и при нулевом уровне сигнала на третьем входе 40 блока синхронизации 9 на интервале t5 начинается формирование сигнала на пятом выходе 42 блока синхронизации 9, по которому первый счетчик 12 сбрасывается в исходное состояние, при котором на выходе первого запоминающего блока 11 вновь формируется вектор отсчетов νink для первой гауссовской компоненты. При этом сигнал на третьем входе 40 возвращается в единичное состояние. По высокому уровню на третьем выходе 39 в момент времени t6 импульс на пятом выходе 42 блока синхронизации 9 заканчивается. При наличии на первом входе 35 блока синхронизации 9 инициирующего импульса происходит перезапуск блока корреляционной обработки 2 для обработки следующего вектора отсчетов входного сигнала Uk. При этом по фронту импульса на пятом выходе 42 блока синхронизации 9 происходит выдача импульсов с его первого выхода 37. Следующий цикл обработки входного сигнала Uk в блоке корреляционной обработки 2 аналогичен описанному циклу.
Работа блока выбора максимального сигнала 3 осуществляется следующим образом: на первый вход 50 блока синхронизации 20 поступает синхросигнал с соответствующего выхода блока корреляционной обработки 2. По переднему фронту импульсов с выхода тактового генератора 4 и при наличии сигнала на первом входе 50 блока синхронизации 20 значение сигнала xin с информационного выхода 46 блока корреляционного обработки 2 (в момент времени t4) записывают в первый регистр 16 по импульсу со второго выхода 53 блока синхронизации 20. Этот же импульс поступает на второй (инвертирующий) вход конъюнктора 21. В этом же интервале времени (t4) с первого выхода 52 блока синхронизации 20 одновременно формируют импульс, который поступает на блок сравнения 19 и блокирует его при записи первого значения xin в каждом цикле, что обеспечивает независимо от значения xi1 перезапись его с выхода первого регистра 16 во второй регистр 17 по заднему фронту тактовых импульсов (в момент времени t4). В следующем такте (момент времени t5) по фронту импульса со второго выхода 53 блока синхронизации 20 происходит сброс импульса на первом его выходе 52 в нулевое состояние, а также запись в первый регистр 16 следующего значения xin. В течение половины периода тактовых импульсов (в интервале времени t5) в блоке сравнения 19 осуществляют сравнение двух значений xin, находящихся на его входах. Если значение xin на выходе первого регистра 16 больше значения на выходе второго регистра 17, то блок сравнения 19 (который анализирует также значения сравниваемых чисел) вырабатывает на своем выходе импульс, по которому происходит перезапись большего значения во второй регистр 17. Если значение xin на выходе регистра 16 (второй вход 49 блока сравнения 19) меньше или равно значению на выходе регистра 17 (первый вход 48 блока сравнения 19), то блок сравнения 19 не формирует импульс перезаписи, а во втором регистре 17 сохраняется прежнее значение. Таким образом происходит выбор максимального значения xin из xin.
Блок синхронизации 20 в каждом цикле «отслеживает» нужное количество значений xin. Поэтому при поступлении на вход первого регистра 16 последнего значения xin и после сравнения поступившего значения с предпоследним, блок синхронизации 20 (в момент времени t8) вырабатывает на третьем выходе 54 импульс, по которому осуществляет перезапись значения xi=max{xin} в третий регистр 18, сброс регистров 16 и 17 в нулевое состояние и передача максимального значения xi с выхода 56 третьего регистра 18, являющегося выходом блока выбора максимального сигнала 3. В этот же момент на четвертом выходе 55 блока синхронизации 20 выдают импульс инициализации на блок фильтрации каналов 5.
Работа блока фильтрации каналов 5 осуществляется следующим образом.
Значения максимального сигнала xi=max{xin} с информационных выходов блока выбора максимального сигнала 3 первой части каждого канала обработки сигналов 11-1I в момент времени t8 поступают на соответствующие входы 571-57i порогового устройства 22. В этот же момент времени с выходов 55 блоков синхронизации 20 первой части каждого канала обработки 11-1I поступают импульсы инициализации на входы 581-58i блока синхронизации 23. Через половину цикла тактовые импульсы тактового генератора проходят на вход 59 блока синхронизации 23 и на первом выходе 60 блока синхронизации 23 выдается импульс на пороговое устройство 22. На пороговом устройстве осуществляют сравнение значений xi каждого канала обработки с пороговым значением с0. В случае если имеет место превышение данного порога, то на соответствующих выходах порогового устройства 22 возвращается значение входа, в противном случае выход порогового устройства обнуляется, т.е.
Таким образом, если на входы порогового устройства поступило i значений xi, то по результатам сравнения на выходе получают z значений  , причем
, причем 
В момент времени t9 значения  подают на входы 631-63z блока формирования адреса 24, который «отслеживает» входные значения таким образом, что если на входе имеется ненулевое значение, то данный вход учитывают при формировании адреса матрицы L преобразования. Для текущей комбинации входных значений блок формирования адреса 24 генерирует адрес матрицы L линейного преобразования в виде r-разрядного двоичного кода и передает данное значение на выход 65 в течение половины такта с момента начала t9.
подают на входы 631-63z блока формирования адреса 24, который «отслеживает» входные значения таким образом, что если на входе имеется ненулевое значение, то данный вход учитывают при формировании адреса матрицы L преобразования. Для текущей комбинации входных значений блок формирования адреса 24 генерирует адрес матрицы L линейного преобразования в виде r-разрядного двоичного кода и передает данное значение на выход 65 в течение половины такта с момента начала t9.
Выходные значения с блока формирования адреса 24 параллельно передают на вход 61 блока синхронизации 23. Вход 61 блока синхронизации 23 выполняет функцию «сканирующего контакта». При появлении первого значения напряжения на входе 61 блока синхронизации 23 через половину такта (в интервале времени t9) на выходе 62 блока синхронизации 23 генерируют импульс инициализации, который передают на выход блока фильтрации каналов 5 во вторую часть соответствующих каналов обработки сигналов 11-1I.
В то же время (в момент времени t9) значения с выходов порогового устройства 22 подают на соответствующие выходы 641-64z блока фильтрации каналов 5 и поступают во вторую часть соответствующих каналов обработки сигналов 11-1I (второй запоминающий блок 28). Если на выходах порогового устройства 22 все значения ненулевые, то в результате задействуют все z=I каналов обработки сигналов (блоки линейного преобразования 6).
Блок линейного преобразования 6 работает по следующему принципу.
По инициализирующему сигналу (второй полутакт с начала t9) на первом входе 69 блока синхронизации 26 тактовые импульсы с второго входа 70 блока синхронизации 26 проходят на его первый выход. Одновременно с этим считывают адрес матрицы L преобразования со входа 66 первого запоминающего блока 25, являющегося входом блока линейного преобразования 6, и на выходах 681-68z первого запоминающего блока 25 выдают значения первого столбца матрицы L преобразования [l11, l21, …, lz1].
В момент времени t10 тактовые импульсы от тактового генератора 4 проходят на второй 71 выход блока синхронизации 26 и поступают на вторые входы блоков регистров 271-27z, а с четвертного выхода 73 блока синхронизации поступает единичный импульс, который инициализирует считывание и перезапись значений  с входа 76 второго запоминающего блока 28, поступившее с соответствующего выхода порогового устройства 22 блока фильтрации каналов 5 в интервале времени t9.
с входа 76 второго запоминающего блока 28, поступившее с соответствующего выхода порогового устройства 22 блока фильтрации каналов 5 в интервале времени t9.
В этот же момент (интервал t10) значения первого столбца матрицы кросс-корреляции, [l11, l21, …, lz1], на первых входах блоков регистров 271-27z проходят на блоки умножителей 291-29z, где осуществляют операцию умножения первого столбца матрицы L, [l11, l21, …, lz1], на значения  со второго запоминающего блока 28. Через половину такта с момента начала t10 на первом выходе блока синхронизации 26 проходит новый тактовый импульс, который подается на вход 67 первого запоминающего блока 25 для выдачи следующего столбца матрицы кросс корреляции.
со второго запоминающего блока 28. Через половину такта с момента начала t10 на первом выходе блока синхронизации 26 проходит новый тактовый импульс, который подается на вход 67 первого запоминающего блока 25 для выдачи следующего столбца матрицы кросс корреляции.
В момент времени t11 с выхода 72 блока синхронизации 26 тактовые импульсы тактового генератора 4 проходят на вторые входы блоков умножителей 291-29z, которые инициализируют передачу результата перемножения на соответствующие входы блока вычисления максимального сигнала 30, где осуществляют операцию поиска максимума из элементов первого столбца,  . Данное значение
. Данное значение  поступает на первый выход блока вычисления максимального значения 30. В каждый последующий такт значения
поступает на первый выход блока вычисления максимального значения 30. В каждый последующий такт значения  выводят соответственно на 2-й, 3-й…z-й выходы блока вычисления максимального значения 30. Вместе с тем в момент времени t11 с блока вычисления максимального значения 30 на первый вход 77 счетчика 31 поступает значение z, до которого осуществляют счет. На счетчик данное значение z выдается исходя из количества активных входов блока вычисления максимального сигнала 30. По окончанию выполнения каждой операции
выводят соответственно на 2-й, 3-й…z-й выходы блока вычисления максимального значения 30. Вместе с тем в момент времени t11 с блока вычисления максимального значения 30 на первый вход 77 счетчика 31 поступает значение z, до которого осуществляют счет. На счетчик данное значение z выдается исходя из количества активных входов блока вычисления максимального сигнала 30. По окончанию выполнения каждой операции  происходит приращение на единицу значения второго входа 78 счетчика 31 и сравнение со значением z на его первом входе 77.
происходит приращение на единицу значения второго входа 78 счетчика 31 и сравнение со значением z на его первом входе 77.
Когда на втором входе 78 счетчика 31 значение равно 2, со второго выхода 80 счетчика 31 подают управляющий сигнал, который поступает на вход 81 решающего устройства 32. В свою очередь решающее устройство считывает значения со своего первого и второго входа, т.е.  и
и  и осуществляет в момент времени t13 сравнение данных значений -
и осуществляет в момент времени t13 сравнение данных значений -  и сохраняет максимальное из данных значений на своем соответствующем входе, а оставшееся значение обнуляет. При поступлении следующего управляющего сигнала с выхода 80 счетчика 31, решающее устройство 32 осуществляет сравнение значения с третьего входа решающего устройства 32,
и сохраняет максимальное из данных значений на своем соответствующем входе, а оставшееся значение обнуляет. При поступлении следующего управляющего сигнала с выхода 80 счетчика 31, решающее устройство 32 осуществляет сравнение значения с третьего входа решающего устройства 32,  и максимального значения на предыдущем такте, т.е.
и максимального значения на предыдущем такте, т.е.  и сохраняет максимальное значение на соответствующем входе. Данная операция циклически повторяют до последнего анализируемого значения
и сохраняет максимальное значение на соответствующем входе. Данная операция циклически повторяют до последнего анализируемого значения  .
.
Когда значения входа 77 и входа 78 счетчика 31 равны, что означает окончание вычисления максимального значения для последнего столбца матрицы,  на выходе 79 счетчика 31 формируют управляющий импульс, который подают на вход 74 блока синхронизации 26 По данному импульсу прохождение тактовых импульсов на соответствующих выходах блока синхронизации 26 останавливается. В этот же момент с выхода 75 блока синхронизации 26 подают управляющий импульс на решающее устройство 32, которое в свою очередь осуществляет сравнение найденного к этому моменту максимального значения
на выходе 79 счетчика 31 формируют управляющий импульс, который подают на вход 74 блока синхронизации 26 По данному импульсу прохождение тактовых импульсов на соответствующих выходах блока синхронизации 26 останавливается. В этот же момент с выхода 75 блока синхронизации 26 подают управляющий импульс на решающее устройство 32, которое в свою очередь осуществляет сравнение найденного к этому моменту максимального значения  с порогом с1. Если найденное максимальное значение превышает данный порог, то на выходе решающего устройства принимают решение о наличии Si различаемого опорного сигнала.
с порогом с1. Если найденное максимальное значение превышает данный порог, то на выходе решающего устройства принимают решение о наличии Si различаемого опорного сигнала.
В блоке линейного преобразования 6 реализован параллельно-конвейерный режим работы: каждое значение столбца матрицы L параллельно обрабатывают в каждом из z каналов обработки сигналов l1-lI, причем каждый последующий столбец матрицы сдвигает предыдущие значения при наступлении нового такта обработки.
Работа устройства на временных диаграммах, фиг. 7, представлена для z=4.
По сравнению с устройством-прототипом и способом-прототипом, в предлагаемом способе и устройстве обработку входного вектора отсчетов Uk,  смеси сигналов и внутрисистемных помех осуществляют с учетом уже имеющейся на приемной стороне информации об уровне и структуре внутрисистемных помех, характерных для любых систем множественного доступа. Применение данной информации позволяет компенсировать влияние внутрисистемных помех и тем самым повысить верность приема сигналов при действии внутрисистемных помех.
смеси сигналов и внутрисистемных помех осуществляют с учетом уже имеющейся на приемной стороне информации об уровне и структуре внутрисистемных помех, характерных для любых систем множественного доступа. Применение данной информации позволяет компенсировать влияние внутрисистемных помех и тем самым повысить верность приема сигналов при действии внутрисистемных помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство различения сигналов на фоне произвольной помехи | 1988 |
|
SU1596469A1 |
| УСТРОЙСТВО РАЗРЕШЕНИЯ СИГНАЛОВ НА ФОНЕ ПРОИЗВОЛЬНОЙ ПОМЕХИ | 2003 |
|
RU2251811C2 |
| УСТРОЙСТВО РАЗРЕШЕНИЯ РАДИОИМПУЛЬСНЫХ СИГНАЛОВ НА ФОНЕ ПРОИЗВОЛЬНОЙ ПОМЕХИ | 2004 |
|
RU2269205C1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ СЛОЖНЫХ СИГНАЛОВ | 1987 |
|
SU1840228A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ГРУППОВОГО СИГНАЛА | 1998 |
|
RU2144266C1 |
| Способ адаптивной обработки сигналов в обзорных когерентно-импульсных радиолокационных станциях | 2019 |
|
RU2704789C1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ М-ПОСЛЕДОВАТЕЛЬНОСТИ | 1984 |
|
SU1840075A1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ М-ПОСЛЕДОВАТЕЛЬНОСТИ | 1983 |
|
SU1840196A1 |
| Способ передачи информации с помощью широкополосных сигналов | 2018 |
|
RU2713384C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВЕСОВОГО КОЭФФИЦИЕНТА В УСЛОВИЯХ НЕСТАЦИОНАРНОСТИ ПОМЕХОВОЙ ОБСТАНОВКИ | 2022 |
|
RU2807614C1 |
Изобретение относится к технике электросвязи и может быть использовано в приемниках сигналов радиоуправления и радиолокационных станций, системах подвижной связи. Технический результат заключается в повышении верности приема сигналов при действии внутрисистемных помех. Способ разделения сигналов при действии внутрисистемных помех заключается в том, что над вектором отсчетов смеси входного сигнала и произвольной помехи Uk в каждом канале обработки сигналов осуществляют корреляционную обработку для каждого из N гауссовского случайного процесса в виде

находят максимальное значение результата корреляционной обработки хi=maxxin по каждой гауссовской компоненте полигауссового разложения суммарной помехи, определяют текущую комбинацию различаемых опорных сигналов согласно правилу  и для принятия решения об опорном сигнале Si выполняют преобразования в соответствии с решающим правилом:
и для принятия решения об опорном сигнале Si выполняют преобразования в соответствии с решающим правилом:

где Si - опорный сигнал; L - матрица линейного преобразования; R - матрица кросс-корреляции опорных сигналов, включенная в матрицу линейного преобразования; σ2 - дисперсия помехи; А - диагональная матрица, элементы которой соответствуют энергиям принятых сигналов пользователей;  - комбинация значений результата корреляционной обработки предварительных решений о сигналах; с1 - пороговое значение. 2 н.п. ф-лы, 7 ил.
- комбинация значений результата корреляционной обработки предварительных решений о сигналах; с1 - пороговое значение. 2 н.п. ф-лы, 7 ил.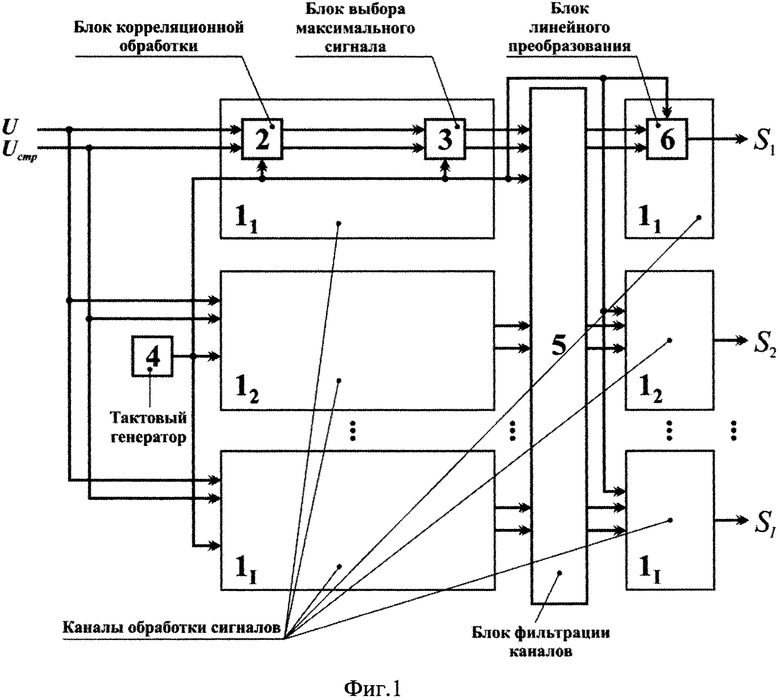
1. Способ разделения сигналов при действии внутрисистемных помех, заключающийся в том, что над вектором отсчетов смеси входного сигнала и произвольной помехи Uk в виде k отсчетов,  в каждом
в каждом  канале обработки сигналов осуществляют корреляционную обработку с учетом ее полигауссового представления для каждого из N гауссовского случайного процесса, в результате получают мягкие статистики предварительных решений о сигналах в виде:
канале обработки сигналов осуществляют корреляционную обработку с учетом ее полигауссового представления для каждого из N гауссовского случайного процесса, в результате получают мягкие статистики предварительных решений о сигналах в виде:

находят максимальное значение результата корреляционной обработки xi=max xin по каждой гауссовской компоненте полигауссового разложения суммарной помехи, отличающийся тем, что на основе сравнения максимальных значений результата корреляционной обработки xi с пороговым значением с0 определяют текущую комбинацию различаемых опорных сигналов  согласно правилу
согласно правилу
над вектором значений осуществляют линейное преобразование в виде перемножения инверсной симметричной матрицы кросс-корреляции опорных сигналов R, смещенных на значения вклада фонового шума σ2А-2, находят максимального значения каждого элемента полученного результата и сравнивают его с пороговым значением с1 для принятия решения об опорном сигнале Si в соответствии с решающим правилом:

где Si - опорный сигнал;
L - матрица линейного преобразования;
R - матрица кросс-корреляции опорных сигналов, включенная в матрицу линейного преобразования;
σ2 - дисперсия помехи;
А - диагональная матрица, элементы которой соответствуют энергиям принятых сигналов пользователей;
- комбинация значений результата корреляционной обработки предварительных решений о сигналах;
c1 - пороговое значение.
2. Устройство разделения сигналов при действии внутрисистемных помех, содержащее  каналов обработки сигналов, каждый из которых включает блок корреляционной обработки и блок выбора максимального сигнала; тактовый генератор, причем входы блоков корреляционной обработки являются входами устройства, а тактовый генератор соединен с каждым блоком корреляционной обработки и каждым блоком выбора максимального сигнала каждого канала обработки сигналов соответственно, входы блока выбора максимального сигнала соединены с выходами блока корреляционной обработки соответственно для каждого канала обработки сигналов, отличающееся тем, что введены блок фильтрации каналов, являющийся общим для всех каналов обработки сигналов, и блоки линейного преобразования, каждый из которых включен в состав каждого канала обработки сигналов, так, что входы блока фильтрации каналов соединены с соответствующими выходами каждого блока выбора максимального сигнала для каждого канала обработки сигналов соответственно, а выходы блока фильтрации каналов соединены со входами каждого блока линейного преобразования каждого канала обработки сигналов соответственно, причем выход тактового генератора соединен со входом блока фильтрации каналов и входом каждого блока линейного преобразования для каждого канала обработки сигналов соответственно.
каналов обработки сигналов, каждый из которых включает блок корреляционной обработки и блок выбора максимального сигнала; тактовый генератор, причем входы блоков корреляционной обработки являются входами устройства, а тактовый генератор соединен с каждым блоком корреляционной обработки и каждым блоком выбора максимального сигнала каждого канала обработки сигналов соответственно, входы блока выбора максимального сигнала соединены с выходами блока корреляционной обработки соответственно для каждого канала обработки сигналов, отличающееся тем, что введены блок фильтрации каналов, являющийся общим для всех каналов обработки сигналов, и блоки линейного преобразования, каждый из которых включен в состав каждого канала обработки сигналов, так, что входы блока фильтрации каналов соединены с соответствующими выходами каждого блока выбора максимального сигнала для каждого канала обработки сигналов соответственно, а выходы блока фильтрации каналов соединены со входами каждого блока линейного преобразования каждого канала обработки сигналов соответственно, причем выход тактового генератора соединен со входом блока фильтрации каналов и входом каждого блока линейного преобразования для каждого канала обработки сигналов соответственно.
| Устройство различения сигналов на фоне произвольной помехи | 1988 |
|
SU1596469A1 |
| УСТРОЙСТВО РАЗРЕШЕНИЯ РАДИОИМПУЛЬСНЫХ СИГНАЛОВ НА ФОНЕ ПРОИЗВОЛЬНОЙ ПОМЕХИ | 2004 |
|
RU2269205C1 |
| Передвижное устройство для опрыскивания и опыления отравляющими веществами растений с целью истребления насекомых-вредителей | 1930 |
|
SU31184A1 |
| Способ приема сигналов при произвольных помехах | 1972 |
|
SU516204A1 |
| СИСТЕМА РАДИОСВЯЗИ С МНОЖЕСТВЕННЫМ ДОСТУПОМ | 2007 |
|
RU2327288C1 |

