Изобретение относится к управлению движущимся судном во время выполнения им ключевой судовой операции, например швартовной операции или динамического позиционирования, с соблюдением требований безопасности и эффективности ее осуществления и касается автоматического управления движительно-рулевым комплексом судна с использованием значений координат двух разнесенных по длине судна точек в заданной координатной системе, положение и ориентация которой на плоскости определяется энергетической эффективностью и безопасностью выполняемого маневрирования.
Известен способ управления движущимся судном по величине поперечных смещений двух разнесенных по длине судна точек, условно называемых носовой F и кормовой А, и условной точки G, расположенной в пределах корпуса судна в его диаметральной плоскости (ДП), текущее положение которой определяют исходя из текущих значений координат носовой F и кормовой А точек (Пат. РФ №2553610, опубл. 25.06.2015).
Способ заключается в том, что в пределах контура судна в его ДП выбирают две точки, одна из которых расположена к носу судна (точка F на фиг. 1-5), а другая к корме судна (точка А на фиг. 1-5) относительно плоскости мидель-шпангоута. Расстояние между точками F и А выбирают в зависимости от технической возможности размещения в этих точках приемных антенн спутниковой навигационной системы (СНС). Чем больше это расстояние, тем качественнее работа системы управления движением позиционирующего судна относительно оси OYo.
Координаты точек F и А определяют непрерывно с высокой точностью (±1,0 м), это стало возможным с введением в СНС береговых станций, вычисляющих и передающих на судно дифференциальные поправки.
Значения координат позволяют непрерывно вычислять поперечные отклонения точки F (dxoF) и точки A (dxoA) от оси OYo и продольные отклонения точки F(dyoF) и точки A (dyoA) от оси ОХo. Знаки указанных отклонений зависят от октанта декартовой координатной системы XoOYo, в котором находятся точки F и А.
Возникающие поперечные отклонения вырабатывают сигнал управления для работы отдельных элементов или всего движительно-рулевого комплекса судна по закону:

где α1, α2 - коэффициенты усиления по поперечным отклонениям носовой и кормовой точек судна от оси OY0. Сигнал σy считается положительным при вращении судна по часовой стрелке и отрицательным при вращении судна против часовой стрелки. На фиг. 1-4 изображены основные варианты возможных отклонений судна от оси OYo. Например, на фиг. 1, 2 ДП судна пересекает ось OYo под некоторым углом, величина которого характеризуется значениями поперечных смещений точки F (dxoF) и точки А (dxoA), причем dxoF больше 0, dxoA меньше 0 (фиг. 1) и dxoF меньше 0, dxoA больше 0 (фиг. 2). В первом случае (фиг. 1) согласно закону (*) элементы движительно-рулевого комплекса будут обеспечивать вращение судна против часовой стрелки, что приведет к уменьшению dxoF и dxoA и в конечном итоге к совпадению ДП судна и оси OYo; во втором случае (фиг. 2) сигнал управления будет иметь положительное значение и движительно-рулевой комплекс обеспечит вращение судна по часовой стрелке, что приведет к уменьшению dxoF, dxoA и к совпадению ДП судна и оси OYo.
На фиг. 3, 4 ДП судна не пересекает линию OYo, а поперечные смещения точек F, А имеют одинаковые знаки, положительные на фиг. 3 и отрицательные на фиг. 4. Знак σy и соответствующее ему направление вращения судна, обеспечиваемое его движительно-рулевым комплексом, зависят от соотношения значений коэффициентов α1 и α2 (α1 больше α2, если знаки поперечных смещений точек F и А одинаковы, фиг. 3, 4; α1 и α2 будут равны по величине, если знаки поперечных смещений точек F и А противоположны, фиг. 1, 2). Соотношение значений коэффициентов α1 и α2 может быть выбрано из различных соображений. Например, если считать, что отклонение направления ДП судна от линии OYo будет находиться в пределах ±90°, то указанное соотношение будет определяться выражением:
 ,
,
где  - расстояние между точками F и А.
- расстояние между точками F и А.
Возникающие продольные отклонения вырабатывают сигнал управления для работы отдельных элементов или всего движительно-рулевого комплекса судна по закону:

где β1, β2 - коэффициенты усиления по продольным отклонениям носовой и кормовой точек судна от оси ОХo. Сигнал σх считается положительным при движении судна передним ходом и отрицательным при движении судна задним ходом. При этом вывод условной точки G в заданную точку О в процессе выполнения ключевой судовой операции будет обеспечиваться исходя из условия
 .
.
Формируют вручную или автоматически с учетом значений текущих (ϕот, λот) и заданных (ϕоз, λоз) координат точки О сигнал на изменение положения начала координатной системы XoOYo (σo):
 ,
,
где ϕот, λот - текущие значения широты и долготы точки О соответственно; ϕоз, λоз - заданные значения широты и долготы точки О соответственно; χ1, χ2 - коэффициенты усиления.
Формируют вручную или автоматически сигнал на изменение угла поворота оси OYo относительно направления на N с учетом значений текущего Ψт и заданного Ψз угла поворота:
 ,
,
где γ - коэффициент усиления.
При этом значения заданных координат (ϕоз, λоз) начала координатной системы XoOYo определяют исходя из заданного положения судна на заданной траектории маневрирования, например, при выполнении швартовной операции.
Значение заданного направления оси OYo определяют исходя из безопасности и энергетической эффективности управления движением судна. В частности, при позиционировании судна в заданной точке указанное направление определяют с учетом текущего значения направления ветра в районе позиционирования.
Таким образом, меняется положение и ориентация координатной системы XoOYo на плоскости с учетом особенностей осуществляемого маневрирования судна при выполнении конкретной ключевой судовой операции.
Однако при выполнении ряда ключевых судовых операций изменение положения заданной точки О (начало координатной системы XoOYo) на плоскости, а также направления ДП судна (положительное направление оси OYo) необходимо соблюдать условие прихода судна в заданную точку с определенными значениями кинематических параметров движения судна (υх - продольная составляющая линейной скорости υ судна; υy - поперечная составляющая линейной скорости υ судна; ω - угловая скорость судна), так как в процессе движения судна из одной точки в другую кинематические параметры его движения не всегда остаются постоянными, исходя из целей и задач выполняемого маневрирования. Так, например, в процессе швартовки судна кинематические параметры его движения будут постоянно меняться, отвечая требованиям безопасности ее выполнения. При этом в конечной стадии швартовки кинематические параметры движения швартующегося судна, исходя из требований безопасности выполнения швартовки, должны иметь нулевые значения (υх=0; υу=0; ω=0). То же самое можно сказать и о маневрировании судна при динамическом позиционировании, когда в заданной позиционной точке указанные кинематические параметры движения судна должны иметь те же значения, что и в конечной стадии швартовки.
Способ управления движением судна, рассматриваемый в качестве прототипа (Пат. РФ №2553610, опубл. 05.06.2015), не обеспечивает в полной мере выполнения условий энергетической эффективности и безопасности при выполнении ряда ключевых судовых операций, так как не предусматривает возможные необходимые изменения кинематических параметров движения судна при переходе его из одной точки в другую, заданную положением координатной системы XoOYo, как ее началом (точка О), так и положительным направлением оси OYo.
Технический результат, на достижение которого направлено заявляемое изобретение, состоит в приведении судна в заданное положение на плоскости при выполнении удержания судна в заданном положении или движения судна по заданной траектории с учетом соблюдения условия прихода судна в заданную точку с определенными значениями кинематических параметров его движения исходя из требований энергетической эффективности и безопасности выполнения ключевой судовой операции.
Для достижения указанного технического результата в способе управления движущимся судном, когда в пределах контура судна в его диаметральной плоскости выбирают две точки, одна из которых расположена к носу судна (точка F на фиг. 1-5), а другая к корме судна (точка А на фиг. 1-5) относительно плоскости мидель-шпангоута. Расстояние между точками F и А выбирают в зависимости от технической возможности размещения в этих точках приемных антенн спутниковой навигационной системы (СНС). Чем больше это расстояние, тем качественнее работа системы управления движением позиционирующего судна относительно оси OYo.
Координаты точек F и А определяют непрерывно с высокой точностью (±1,0 м), это стало возможным с введением в СНС береговых станций, вычисляющих и передающих на судно дифференциальные поправки.
Значения координат позволяют непрерывно вычислять поперечные отклонения точки F (dxoF) и точки A (dxoA) от оси OYo и продольные отклонения точки F(dyoF) и точки A (dyoA) от оси ОХo. Знаки указанных отклонений зависят от октанта декартовой координатной системы XoOYo, в котором находятся точки F и А.
Возникающие поперечные отклонения вырабатывают сигнал управления для работы отдельных элементов или всего движительно-рулевого комплекса судна по закону:
 ,
,
где α1, α2 - коэффициенты усиления по поперечным отклонениям носовой и кормовой точек судна от оси OY0. Сигнал σу считается положительным при вращении судна по часовой стрелке и отрицательным при вращении судна против часовой стрелки. На фиг. 1-4 изображены основные варианты возможных отклонений судна от оси OYo. Например, на фиг. 1, 2 ДП судна пересекает ось OYo под некоторым углом, величина которого характеризуется значениями поперечных смещений точки F (dxoF) и точки А (dxoA), причем dxoF больше 0, dxoA меньше 0 (фиг. 1) и dxoF меньше 0, dxoA больше 0 (фиг. 2). В первом случае (фиг. 1) согласно закону (*) элементы движительно-рулевого комплекса будут обеспечивать вращение судна против часовой стрелки, что приведет к уменьшению dxoF и dxoA и в конечном итоге к совпадению ДП судна и оси OYo; во втором случае (фиг. 2) сигнал управления будет иметь положительное значение и движительно-рулевой комплекс обеспечит вращение судна по часовой стрелке, что приведет к уменьшению dxoF, dxoA и к совпадению ДП судна и оси OYo.
На фиг. 3, 4 ДП судна не пересекает линию OYo, а поперечные смещения точек F, А имеют одинаковые знаки, положительные на фиг. 3 и отрицательные на фиг. 4. Знак σу и соответствующее ему направление вращения судна, обеспечиваемое его движительно-рулевым комплексом, зависят от соотношения значений коэффициентов α1 и α2 (α1 больше α2, если знаки поперечных смещений точек F и А одинаковы, фиг. 3, 4; α1 и α2 будут равны по величине, если знаки поперечных смещений точек F и А противоположны, фиг. 1, 2). Соотношение значений коэффициентов α1 и α2 может быть выбрано из различных соображений. Например, если считать, что отклонение направления ДП судна от линии OYo будет находиться в пределах ±90°, то указанное соотношение будет определяться выражением:
 ,
,
где - расстояние между точками F и А.
Возникающие продольные отклонения вырабатывают сигнал управления для работы отдельных элементов или всего движительно-рулевого комплекса судна по закону:
где β1, β2 - коэффициенты усиления по продольным отклонениям носовой и кормовой точек судна от оси ОХo. Сигнал σх считается положительным при движении судна передним ходом и отрицательным при движении судна задним ходом. При этом вывод условной точки G в заданную точку О в процессе выполнения ключевой судовой операции будет обеспечиваться исходя из условия
 .
.
Формируют вручную или автоматически с учетом значений текущих (ϕот, λот) и заданных (ϕоз, λоз) координат точки О сигнал на изменение положения начала координатной системы XoOYo (σo):
 ,
,
где ϕот, λот - текущие значения широты и долготы точки О соответственно; ϕоз, λоз _ заданные значения широты и долготы точки О соответственно; χ1, χ2 - коэффициенты усиления.
Формируют вручную или автоматически сигнал на изменение угла поворота оси OYo относительно направления на N с учетом значений текущего Ψт и заданного Ψз угла поворота:
 ,
,
где γ - коэффициент усиления.
При этом значения заданных координат (ϕоз, λоз) начала координатной системы XoOYo определяют исходя из заданного положения судна 1 на заданной траектории маневрирования, например, при выполнении швартовной операции.
Значение заданного направления оси OYo определяют исходя из безопасности и энергетической эффективности управления движением судна. В частности, при позиционировании судна в заданной точке указанное направление определяют с учетом текущего значения направления ветра в районе позиционирования.
Таким образом, меняется положение и ориентация координатной системы XoOYo на плоскости с учетом особенностей осуществляемого маневрирования судна при выполнении конкретной ключевой судовой операции.
Отличительными признаками предлагаемого способа от указанного выше известного, наиболее близкого к нему, являются:
для обеспечения вывода и удержания управляемого судна в заданном положении, когда ДП судна совпадает с положительным направлением оси OYo, условная точка судна G совпадает с положением точки О на поверхности Земли, а кинематические параметры движения судна в заданной точке соответствуют требованиям энергетической эффективности и безопасности выполнения ключевой судовой операции, дополнительно формируют вручную или автоматически с учетом значений текущих (υхт, υут, ωт) и заданных (υхз, υуз, ωз) кинематических параметров движения судна сигнал на их изменение:

где υхз, υуз - заданные значения продольной и поперечной составляющих линейной скорости υ судна; υхт, υут - текущие значения продольной и поперечной составляющих линейной скорости υ судна; ωз - заданное значение угловой скорости судна; ωт - текущее значение угловой скорости судна; κ1, κ2, κ3 - коэффициенты усиления.
При этом заданные значения кинематических параметров движения судна (υхз, υуз, ωз) определяют исходя из требований энергетической эффективности и безопасности выполнения ключевой судовой операции.
Коэффициенты усиления (κ1, κ2, κ3) подбирают специально для конкретного судна исходя из особенностей его маневрирования при выполнении конкретной судовой ключевой операции с целью повышения качества ее выполнения.
Предлагаемый способ управления движущимся судном иллюстрируется чертежами, представленными на фиг. 1-5.
На фиг. 1, 2, 3, 4 изображены возможные варианты отклонения судна от оси OY0, на фиг. 5 - управление судном предлагаемым способом.
Предлагаемый способ управления движущимся судном для приведения судна в заданное положение на плоскости при выполнении удержания судна в заданном положении или движения судна по заданной траектории с учетом соблюдения условия прихода судна в заданную точку с определенными значениями кинематических параметров его движения исходя из требований энергетической эффективности и безопасности выполнения ключевой судовой операции осуществляется следующим образом:
в пределах контура судна в его диаметральной плоскости выбирают две точки, одна из которых расположена к носу судна (точка F на фиг. 1-5), а другая к корме судна (точка А на фиг. 1-5) относительно плоскости мидель-шпангоута. Расстояние между точками F и А выбирают в зависимости от технической возможности размещения в этих точках приемных антенн спутниковой навигационной системы (СНС). Чем больше это расстояние, тем качественнее работа системы управления движением позиционирующего судна относительно оси OYo.
Координаты точек F и А определяют непрерывно с высокой точностью (±1,0 м), это стало возможным с введением в СНС береговых станций, вычисляющих и передающих на судно дифференциальные поправки.
Значения координат позволяют непрерывно вычислять поперечные отклонения точки F (dxoF) и точки A (dxoA) от оси OYo и продольные отклонения точки F(dyoF) и точки A (dyoA) от оси ОХo. Знаки указанных отклонений зависят от октанта декартовой координатной системы XoOYo, в котором находятся точки F и А.
Возникающие поперечные отклонения вырабатывают сигнал управления для работы отдельных элементов или всего движительно-рулевого комплекса судна по закону:

где α1, α2 - коэффициенты усиления по поперечным отклонениям носовой и кормовой точек судна от оси OY0. Сигнал σу считается положительным при вращении судна по часовой стрелке и отрицательным при вращении судна против часовой стрелки. На фиг. 1-4 изображены основные варианты возможных отклонений судна от оси OYo. Например, на фиг. 1, 2 ДП судна пересекает ось OYo под некоторым углом, величина которого характеризуется значениями поперечных смещений точки F (dxoF) и точки А (dxoA), причем dxoF больше 0, dxoA меньше 0 (фиг. 1) и dxoF меньше 0, dxoA больше 0 (фиг. 2). В первом случае (фиг. 1) согласно закону (*) элементы движительно-рулевого комплекса будут обеспечивать вращение судна против часовой стрелки, что приведет к уменьшению dxoF и dxoA и в конечном итоге к совпадению ДП судна и оси OYo; во втором случае (фиг. 2) сигнал управления будет иметь положительное значение и движительно-рулевой комплекс обеспечит вращение судна по часовой стрелке, что приведет к уменьшению dxoF, dxoA и к совпадению ДП судна и оси OYo.
На фиг. 3, 4 ДП судна не пересекает линию OYo, а поперечные смещения точек F, А имеют одинаковые знаки, положительные на фиг. 3 и отрицательные на фиг. 4. Знак σу и соответствующее ему направление вращения судна, обеспечиваемое его движительно-рулевым комплексом, зависят от соотношения значений коэффициентов α1 и α2 (α1 больше α2, если знаки поперечных смещений точек F и А одинаковы, фиг. 3, 4; α1 и α2 будут равны по величине, если знаки поперечных смещений точек F и А противоположны, фиг. 1, 2). Соотношение значений коэффициентов α1 и α2 может быть выбрано из различных соображений. Например, если считать, что отклонение направления ДП судна от линии OYo 2 будет находиться в пределах ±90°, то указанное соотношение будет определяться выражением:
 ,
,
где - расстояние между точками F и А.
Возникающие продольные отклонения вырабатывают сигнал управления для работы отдельных элементов или всего движительно-рулевого комплекса судна по закону:

где β1, β2 - коэффициенты усиления по продольным отклонениям носовой и кормовой точек судна от оси ОХo. Сигнал σх считается положительным при движении судна передним ходом и отрицательным при движении судна задним ходом. При этом вывод условной точки G в заданную точку О в процессе выполнения ключевой судовой операции будет обеспечиваться исходя из условия
 .
.
Формируют вручную или автоматически с учетом значений текущих (ϕот, λот) и заданных (ϕоз, λоз) координат точки О сигнал на изменение положения начала координатной системы XoOYo (σo):
 ,
,
где ϕот, λот - текущие значения широты и долготы точки О соответственно; ϕоз, λоз _ заданные значения широты и долготы точки О соответственно; χ1, χ2 - коэффициенты усиления.
Формируют вручную или автоматически сигнал на изменение угла поворота оси OYo относительно направления на N с учетом значений текущего Ψт и заданного Ψз угла поворота:
 ,
,
где γ - коэффициент усиления.
При этом значения заданных координат (ϕоз, λоз) начала координатной системы XoOYo определяют исходя из заданного положения судна на заданной траектории маневрирования, например, при выполнении швартовной операции.
Значение заданного направления оси OYo определяют исходя из безопасности и энергетической эффективности управления движением судна. В частности, при позиционировании судна в заданной точке указанное направление определяют с учетом текущего значения направления ветра в районе позиционирования.
Таким образом, меняют положение и ориентацию координатной системы XoOYo на плоскости с учетом особенностей осуществляемого маневрирования судна при выполнении конкретной ключевой судовой операции.
Формируют вручную или автоматически с учетом значений текущих (υхт, υут, ωт) и заданных (υхз, υуз, ωз) кинематических параметров движения судна сигнал на их изменение:
 ,
,
где υхз, υуз - заданные значения продольной и поперечной составляющих линейной скорости υ судна; υхт, υут - текущие значения продольной и поперечной составляющих линейной скорости υ судна; ωз - заданное значение угловой скорости судна; ωт - текущее значение угловой скорости судна; κ1, κ2, κ3 - коэффициенты усиления.
При этом заданные значения кинематических параметров движения судна (υхз, υуз, ωз) определяют исходя из требований энергетической эффективности и безопасности выполнения ключевой судовой операции.
Коэффициенты усиления (κ1, κ2, κ3) подбирают специально для конкретного судна исходя из особенностей его маневрирования при выполнении конкретной судовой ключевой операции с целью повышения качества ее выполнения.
Таким образом, судно приходит в заданную точку на плоскости с заданными из условий энергетической эффективности и безопасности выполнения ключевой судовой операции кинематическими параметрами движения судна.
В результате применения данного изобретения достигается возможность получения технического результата - обеспечение приведения судна в заданное положение на плоскости при выполнении удержания судна в заданном положении или движения судна по заданной траектории с учетом соблюдения условия прихода судна в заданную точку с определенными значениями кинематических параметров его движения исходя из требований энергетической эффективности и безопасности выполнения ключевой судовой операции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления движущимся судном | 2015 |
|
RU2615848C1 |
| Способ управления движением буксирной системы | 2015 |
|
RU2615846C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ СУДНОМ | 2014 |
|
RU2553610C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ СУДНОМ | 2012 |
|
RU2509030C1 |
| Способ управления судном при выполнении им швартовной операции к борту судна партнёра | 2019 |
|
RU2714994C1 |
| Способ управления судном при выполнении движения по заданной траектории | 2023 |
|
RU2827122C1 |
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА ПАРТНЕРА, СТОЯЩЕГО НА ЯКОРЕ | 2012 |
|
RU2509031C1 |
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА-ПАРТНЕРА, ЛЕЖАЩЕГО В ДРЕЙФЕ | 2012 |
|
RU2509029C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ СУДНА | 2012 |
|
RU2501064C2 |
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА ПАРТНЕРА | 2011 |
|
RU2475410C1 |
Изобретение относится к способу управления движущимся судном. Для управления движущимся судном размещают антенны спутниковой навигационной системы в определенных точках судна, определяют непрерывно их координаты, а также поперечные и продольные отклонения от определенной оси, вырабатывают сигналы управления для работы отдельных элементов или всего движительно-рулевого комплекса по определенному закону, формируют вручную или автоматически сигнал на изменение положения начала координатной системы, значения координат которой определяют исходя из заданного положения судна на заданной траектории маневрирования, формируют сигнал на изменение кинематических параметров движения судна с учетом текущих и заданных их значений определенным образом. Обеспечивается эффективность и безопасность при приведении или удержании судна в заданном положении или при движении судна по заданной траектории для его прихода в заданную точку. 2 з.п. ф-лы, 5 ил. 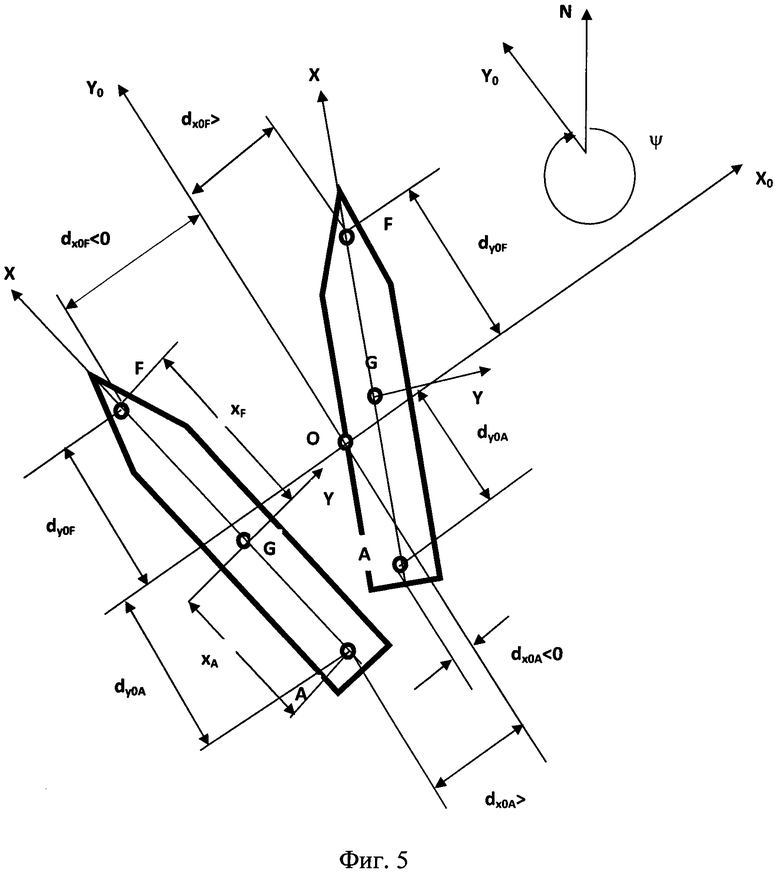
1. Способ управления движущимся судном, заключающийся в том, что в пределах контура судна в его диаметральной плоскости (ДП) выбирают две точки, одна из которых расположена к носу судна (точка F), а другая к корме судна (точка А) относительно плоскости мидель-шпангоута, расстояние между точками F и А выбирают в зависимости от технической возможности размещения в этих точках приемных антенн спутниковой навигационной системы (СНС), чем больше это расстояние, тем качественнее работа системы управления движением позиционирующего судна относительно оси OYo; координаты точек F и А определяют непрерывно с высокой точностью (±1,0 м); значения координат позволяют непрерывно вычислять поперечные отклонения точки F (dxoF) и точки A (dxoA) от оси OYo и продольные отклонения точки F (dyoF) и точки A (dyoA) от оси OXo, знаки указанных отклонений зависят от октанта декартовой координатной системы XoOYo, в котором находятся точки F и А;
возникающие поперечные отклонения вырабатывают сигнал управления для работы отдельных элементов или всего движительно-рулевого комплекса судна по закону:
σy=α1×dxoF+α2dxoA,
где α1, α2 - коэффициенты усиления по поперечным отклонениям носовой и кормовой точек судна от оси OY0, сигнал σy считается положительным при вращении судна по часовой стрелке и отрицательным при вращении судна против часовой стрелки, знак σy и соответствующее ему направление вращения судна, обеспечиваемое его движительно-рулевым комплексом, зависят от соотношения значений коэффициентов α1 и α2 (α1 больше α2, если знаки поперечных смещений точек F и А одинаковы, α1 и α2 будут равны по величине, если знаки поперечных смещений точек F и А противоположны,
возникающие продольные отклонения вырабатывают сигнал управления для работы отдельных элементов или всего движительно-рулевого комплекса судна по закону:
σx=β1×dyoF+β2dyoA
где β1, β2 - коэффициенты усиления по продольным отклонениям носовой и кормовой точек судна от оси OXo, сигнал σx считается положительным при движении судна передним ходом и отрицательным при движении судна задним ходом, при этом вывод условной точки G в заданную точку О в процессе выполнения ключевой судовой операции будет обеспечиваться исходя из условия
⎥dyоF⎢=⎥dyоA⎢,
формируют вручную или автоматически с учетом значений текущих (ϕот, λот) и заданных (ϕоз, λоз) координат точки О сигнал на изменение положения начала координатной системы XoOYo (σo):
σo=χ1×(ϕоз-ϕот)+χ2×(λоз-λот),
где ϕот, λот - текущие значения широты и долготы точки О соответственно; ϕоз, λоз - заданные значения широты и долготы точки О соответственно; χ1, χ2 - коэффициенты усиления; формируют вручную или автоматически сигнал на изменение угла поворота оси OYo относительно направления на N с учетом значений текущего Ψт и заданного Ψз угла поворота:
σΨ=γ×(Ψз-Ψт),
где γ - коэффициент усиления;
при этом значения заданных координат (ϕоз, λоз) начала координатной системы XoOYo определяют исходя из заданного положения судна на заданной траектории маневрирования, например, при выполнении швартовной операции;
таким образом меняют положение и ориентацию координатной системы XoOYo на плоскости с учетом особенностей осуществляемого маневрирования судна при выполнении конкретной ключевой судовой операции, отличающийся тем, что для обеспечения вывода и удержания управляемого судна в заданном положении, когда ДП судна совпадает с положительным направлением оси OYo, условная точка судна G совпадает с положением точки О на поверхности Земли, а кинематические параметры движения судна в заданной точке соответствуют требованиям энергетической эффективности и безопасности выполнения ключевой судовой операции, формируют вручную или автоматически с учетом значений текущих (υхт, υут, ωт) и заданных (υхз, υуз, ωз) кинематических параметров движения судна сигнал на их изменение:
συ,ω=κ1(υхз-υхт)+κ2(υуз-υут)+κ3(ωз-ωт),
где υхз, υуз - заданные значения продольной и поперечной составляющих линейной скорости υ судна; υхт, υут - текущие значения продольной и поперечной составляющих линейной скорости υ судна; ωз - заданное значение угловой скорости судна; ωт - текущее значение угловой скорости судна; κ1, κ2, κ3 - коэффициенты усиления;
при этом заданные значения кинематических параметров движения судна (υхз, υуз, ωз) определяют исходя из требований энергетической эффективности и безопасности выполнения ключевой судовой операции, коэффициенты усиления (κ1, κ2, κ3) подбирают специально для конкретного судна исходя из особенностей его маневрирования при выполнении конкретной судовой ключевой операции с целью повышения качества ее выполнения, в итоге судно приходит в заданную точку на плоскости с заданными из условий энергетической эффективности и безопасности выполнения ключевой судовой операции кинематическими параметрами движения судна.
2. Способ по п. 1, отличающийся тем, что соотношение значений коэффициентов α1 и α2 усиления по поперечным отклонениям носовой и кормовой точек от оси OY может быть выбрано из различных соображений. Например, если считать, что отклонение направления ДП 3 судна 1 от линии OYo будет находиться в пределах ±90°, то указанное соотношение будет определяться выражением:
 ,
,
где  - расстояние между точками F и А.
- расстояние между точками F и А.
3. Способ по п. 1, отличающийся тем, что значение заданного направления оси OYo определяют исходя из безопасности и энергетической эффективности управления движением судна, в частности, при позиционировании судна в заданной точке указанное направление определяют с учетом текущего значения направления ветра в районе позиционирования.
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ СУДНОМ | 2012 |
|
RU2509030C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ СУДНА | 2012 |
|
RU2501064C2 |
| JP 3561750 B2, 02.09.2004 | |||
| Способ регулирования тока вентильного преобразователя | 1984 |
|
SU1365301A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |

