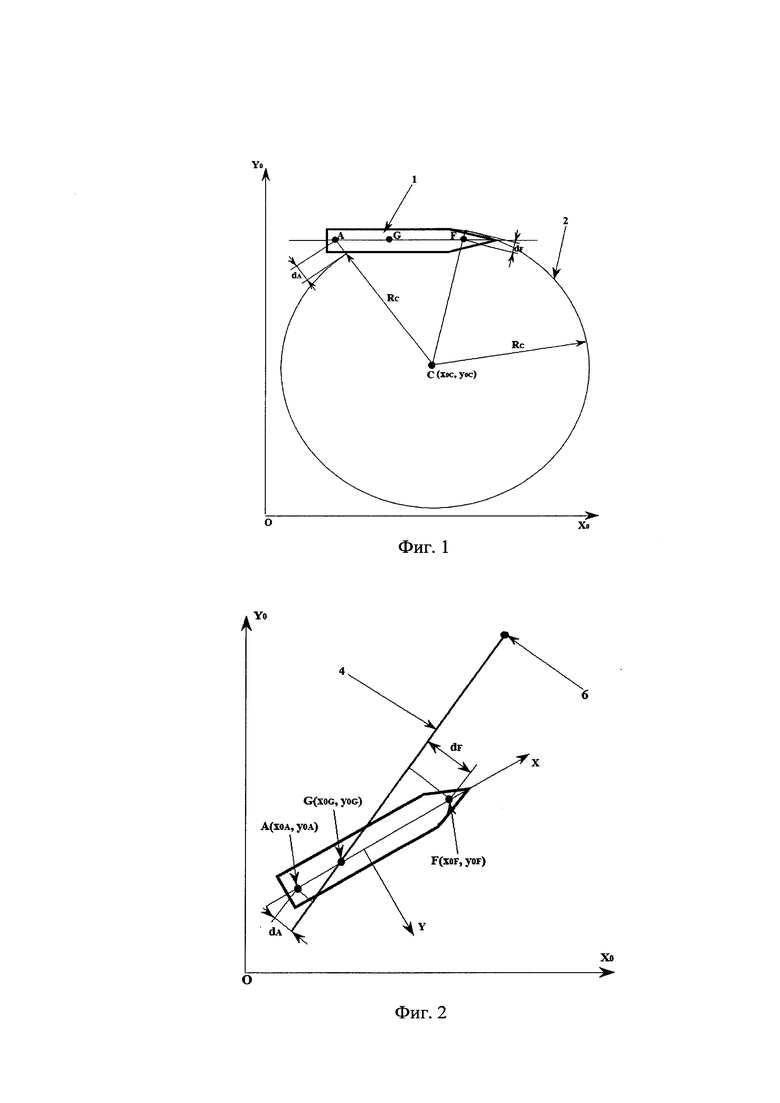
Изобретение относится к водному транспорту и касается управления судном, выполняющим движение по заданной траектории движения (ЗТД), являющейся дугой окружности [1], [5] (Фиг. 1) по величине поперечных смещений двух точек судна, в частности, носовой F и кормовой А, от положения ЗТД, представленной аналитически в неподвижной координатной системе X0,O,Y0 в виде функции у0=f(x0).
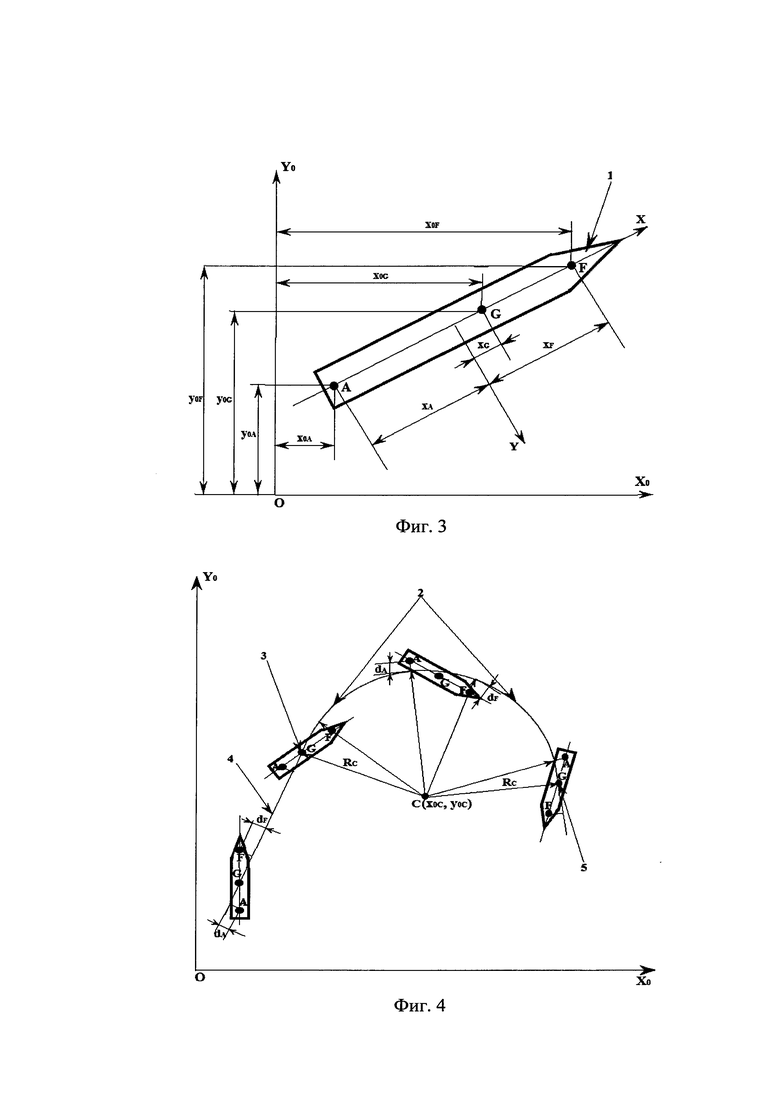
Известен способ управления движением объекта при выполнении им сближения с другим подвижным объектом, например, заданным точкой ЗТ, (Пат. РФ №2356784, опубл.27.052009) по величинам поперечных смещений расположенных на диаметральной плоскости (ДП) судна носовой F и кормовой А точек от текущего положения траектории сближения (ЛП) (Фиг. 2), при котором рассчитывают поперечные смещения этих точек; для вычисления поперечных смещений носовой F и кормовой А точек судна их координаты в неподвижной координатной системе F(x0F, y0F), А(х0А, у0А) измеряют с помощью спутниковой навигационной системы (СНС) и с дифференциальными поправками, перекладку руля судна производят в зависимости от комбинации поперечных смещений носовой dF и кормовой dA точек судна относительно текущего положения траектории сближения, которое определяют, используя заданную точку (ЗТ) как объект, с которым происходит сближение судна и центр тяжести (ЦТ) судна; текущее положение ЗТ и текущее положение ЦТ судна определяют текущее положение траектория сближения в виде прямой ЛП, соединяющей текущее положение ЗТ и текущее положение ЦТ судна G, текущие координаты ЦТ судна в неподвижной координатной систем рассчитывают по формулам:

где x0G, y0G - координаты ЦТ судна в неподвижной координатной системе (Х0, Y0);
x0F, y0F - координаты носовой точки F судна в неподвижной координатной системе;
x0A, y0A - координаты кормовой точки А судна в неподвижной координатной системе;
xF, хА - абсцисса носовой F и кормовой А точки судна соответственно, в координатной системе (X, Y) связанной с судном (Фиг. 3);
xG - абсцисса центра тяжести ЦТ судна в координатной системе, связанной с судном.
Известен способ управления судном при выполнении движения по заданной траектории (ЗТД) (Пат. РФ №2713434, опубл.05.02.2020) по величинам поперечных смещений, расположенных на диаметральной плоскости ДП судна носовой F и кормовой А точек от текущего положения заданной линии пути ЛП, при котором рассчитывают поперечные смещения этих точек, для вычисления поперечных смещений носовой F и кормовой А точек судна их координаты в неподвижной координатной системе F(x0F, y0F), А(x0A, y0A) измеряют с помощью спутниковой навигационной системы (СНС) и с дифференциальными поправками, перекладку руля судна производят в зависимости от комбинации поперечных смещений dF носовой и кормовой dA точек судна относительно текущего положения линии пути (ЛП), которое определяют, используя исходную заданную точку траектории (ЗТТ(1)), как объект, с которым происходит сближение судна и центр тяжести (ЦТ) судна. Положение ЗTT(1) и текущее положение ЦТ судна определяют текущее положение ЛП, проходящей через две точки в виде прямой линии, соединяющей положение исходной ЗТТ(1) и текущее положение ЦТ судна G.
Координаты исходной ЗТТ(1) определяют как координаты точки кривой, описывающей ЗТД уравнением у0=f(x0), определяют положения ЛП(i) (i=1, 2, …, n; n - количество этапов движения по ЗТД). На каждом этапе движения судна по ЗТД координатами двух заданных точек траектории ЗТТ, например, 1-ой ЗTT1 (x01, y01) и 2-ой ЗТТ2 (х02, у02), при этом координаты исходной (первой) ЗТТ(1) соответствуют координатам точки ЗТД в момент начала движения судна по ЗТД, координаты каждой следующей ЗTT(i) определяются как координаты точки пересечения двух кривых, а именно, кривой ЗТД, заданной аналитически в координатной системе X0,Y0 в виде функции у0=f(x0) и дуги окружности заданного радиуса R(i) с центром, расположенным в предыдущей ЗTT(i). Значение радиуса R(i) указанной окружности рассчитывается для каждой отдельной ЛП(i), исходя из кривизны ЗТД на данном этапе движения, размерных характеристик судна и скорости его движения. Наличие полученных указанным способом данных, позволяет осуществлять движение судна по ЗТД, в несколько этапов, количество которых п определяется количеством секущих кривой ЗТД, определяющих положения ЛП(i) при движении судна от ЗTT(i) до ЗТТ(i+1) до окончания движения по ЗТД:
I-ый этап - выход судна в первую ЗТТ(1), выбираем исходную (первую) ЗТТ(1), т.е. точку выхода судна на ЗТД, определяем ее координаты (x01, y01) в неподвижной координатной системе X0,Y0, зная координаты ЦТ судна в неподвижной координатной системе G(x0G, y0G) на момент начала движения для выхода на ЗТД и координаты первой ЗTT1 (x01, y01) определяем начальное положение ЛП, по которой судно начинает движение для выхода в первую ЗТТ1, при этом положение этой ЛП на плоскости X0,Y0 будет меняться в процессе сближения судна с первой ЗTT1, так как будет меняться положение ЦТ судна в процессе его движения в первую ЗTT1, в процессе движения судна в первую ЗТТ(1) по рассчитанной ЛП, управление судном осуществляется по отклонениям dF, dA носовой F(xF, yF) и кормовой А(хА, yA) точек судна от заданной ЛП.
II-ой этап - движение по ЛП(1), до момента прихода в первую ЗТТ(1) рассчитываем первый радиус окружности R(1) с центром в первой ЗТТ(1) (в данном случае центр окружности имеет координаты x01, y01) и определяем координаты следующей ЗТТ(2)(х02, y02), как точки пересечения дуги окружности радиусом R(1) с кривой ЗТД, строим первую секущую кривой ЗТД, то есть первую линию пути ЛП(1), которая будет проходить через первую ЗТТ(1) и вторую ЗТТ(2), являющуюся точкой пересечения дуги окружности заданного радиуса R(1) и кривой ЗТД, моментом окончания сближения судна с первой ЗТТ(1), равно как и моментом начала движения судна по первой линии пути ЛП(1), является момент выхода носовой точки F на первую линию пути ЛП(1), этот момент фиксируется выполнением условия равенства нулю расстояния dF от носовой точки судна F до линии пути ЛП(1), аналогичным образом определяется (фиксируется) момент начала движения по всем следующим ЛП(i), алгоритм управления движением судна по ЗТД на всех следующих этапах аналогичный алгоритму, применяемому на II-ом этапе. При этом выходом судна с ЗТД считается момент прихода его ЦТ в ЗТТ(n).
Однако, в известном способе управления судном при выполнении движения по заданной траектории (ЗТД), которая представляет собой произвольную кривую линию на плоскости, есть определенный недостаток, неоправданно усложняющий алгоритм управления движением судна в случае, если ЗТД является дугой окружности в процессе осуществления ряда маневров, выполняемых в практике судовождения, например, при изменении курса на обратный или осуществлении поворота при движении в узкости [1], [3].
Технический результат, на достижение которого направлено заявляемое изобретение, состоит в повышении энергоэффективности управления судном при движении по заданной траектории движения (ЗТД), представляющей собой дугу окружности с постоянным радиусом кривизны, равным радиусу окружности Rc и известным значениям координат ее центра С (x0C, у) в координатной системе X0OY0, за счет упрощения алгоритма управления движением по отклонениям носовой dF и кормовой dA точек судна от ЗТД.
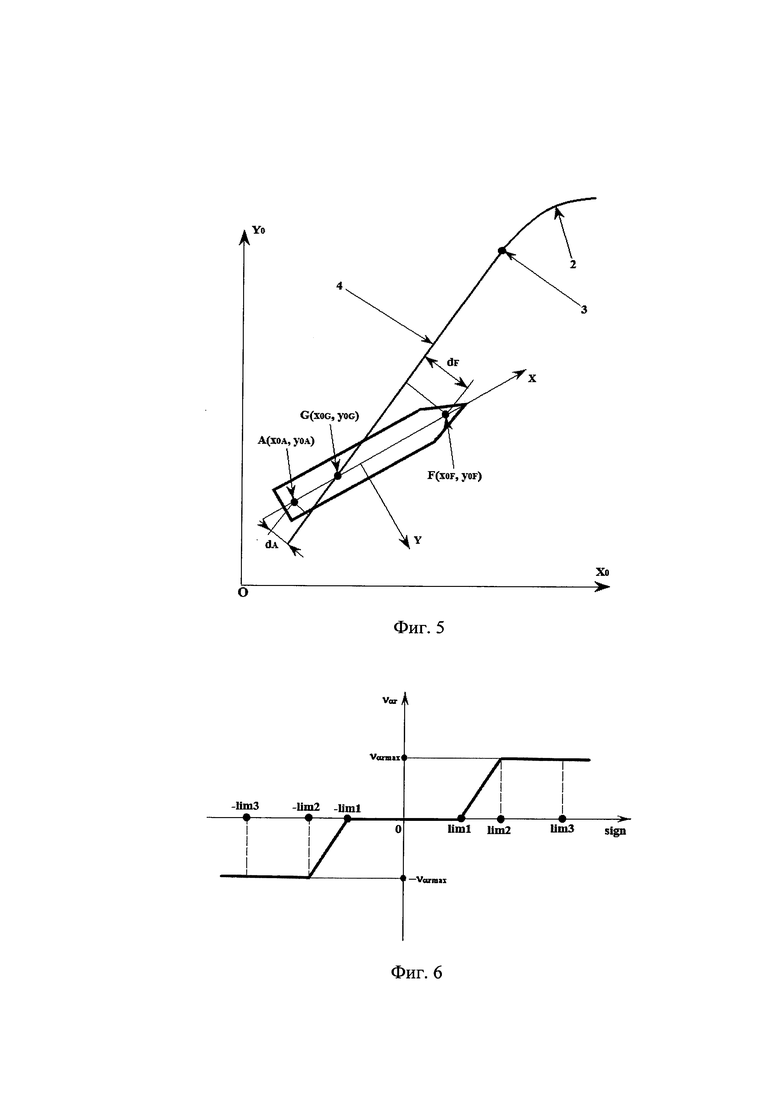
Для достижения указанного технического результата в предлагаемом способе управления судном при выполнении движения по заданной траектории (ЗТД) по величинам поперечных смещений расположенных на диаметральной плоскости (ДП) судна носовой F и кормовой А точек от ЗТД, при котором рассчитывают поперечные смещения этих точек; для вычисления поперечных смещений носовой F и кормовой А точек судна их координаты в неподвижной координатной системе F(x0F, y0F), A(x0A, y0A) измеряют с помощью спутниковой навигационной системы СНС и с дифференциальными поправками, перекладку руля судна производят в зависимости от комбинации поперечных смещений носовой dF и кормовой dA точек судна относительно текущего положения ЛП, которое определяют, используя исходную заданную первую точку траектории ЗТТ(1) (Фиг. 4), как объект, с которым происходит сближение судна и центра тяжести ЦТ судна; положение точки ЗТТ(1) и текущее положение ЦТ судна пределяют текущее положение ЛП, проходящей через две точки в виде прямой линии, соединяющей положение исходной ЗТТ(1) и текущее положение ЦТ судна G, текущие координаты ЦТ судна в неподвижной координатной системе рассчитывают по формулам (1), дополнительно координаты исходной ЗТТ(1)(х01, y01) определяют как координаты точки окружности, являющейся ЗТД, из уравнения
(x01-x0C)2+(y01-y0C)2=RC2. (2)
При этом координаты исходной первой ЗТТ(1) (Фиг. 4) соответствуют координатам точки ЗТД в момент начала движения судна по ЗТД. Координаты конечной ЗТТ(2) (Фиг. 4) определяют с использованием уравнения
(x02-x0C)2+(y02-y0C)2=RC2. (3)
Наличие полученных указанным способом данных, позволяет осуществлять движение судна по ЗТД, в два этапа:
I-ый этап - выход судна в ЗТТ(1) (Фиг. 5).
Выбираем исходную первую ЗТТ(1), т.е. точку выхода судна на ЗТД, определяем ее координаты (x01, y01) в неподвижной координатной системе Х0, O,Y0. Рассчитываем по формулам (1) координаты ЦТ судна в неподвижной координатной системе G(x0G, y0G) на момент начала движения для выхода на ЗТД и координаты первой ЗТТ(1) (х01, y01), определяем начальное положение ЛП, по которой судно начинает движение для выхода в первую ЗТТ1. При этом, очевидно, что положение пути ЛП на плоскости Х0, Y0 будет меняться в процессе сближения судна с первой ЗТТ(1), так как будет меняться положение ЦТ судна в процессе его движения в первую ЗТТ(1). В процессе движения судна в первую ЗТТ(1) по рассчитанной ЛП, управление судном осуществляют по отклонениям двух разнесенных по длине судна точек: носовой F (x0F, y0F) и кормовой А (x0A, y0A) (Фиг. 5). Моментом окончания сближения судна с первой ЗTT(1), равно как и моментом начала движения судна по ЗТД, является момент выхода ЦТ судна G в ЗТТ(1). Этот момент фиксируется выполнением условия равенства текущих координат ЦТ и ЗТТ(1), то есть x0G=х01, y0G=y01.
II-ой этап - движение по ЗТД (Фиг. 1, 4).
Управление движением судна по ЗТД ведется по величинам поперечных отклонений двух точек ДП судна, носовой F и кормовой А, от ЗТД, представляющей собой дугу окружности. Для определения поперечных смещений носовой F и кормовой А точек судна их координаты в неподвижной координатной системе F (x0F, y0F), А (x0A, y0A) измеряют с помощью спутниковой навигационной системы (СНС) с дифференциальными поправками [2]. Отклонения носовой dF и кормовой dA точек судна от ЗТД, представляющей дугу окружности с заданным центром С (х0, y0) и радиусом Rc вычисляют по формулам (4):

С помощью найденных таким образом отклонений dF, dA вырабатывается сигнал sign для системы управления рулевым устройством в виде зависимости, представленной формулой (5)
sign=-kFdF+kAdA. (5)
В формуле (5) kF, kA - коэффициенты усиления по поперечным смещениям носовой и кормовой точек судна от ЗТД (kF>0, kA>0, kF>кА). Причем, поперечное смещение dF, dA заданных носовой F и кормовой А точек судна относительно ЗТД считается положительным, если соответствующая точка F или А смещается в сторону центра окружности С и отрицательным, если она смещается в сторону противоположную центру окружности С.
По значению сигнала sign вырабатывается команда на рулевое устройство, определяющая скорость его перекладки νar по нелинейному закону, задаваемому алгоритмом (6), который в графической форме представлен на Фиг. 6.
νar=0 sign<liml

νar=νarmax sign>lim2
Алгоритм (6) реализуется следующим образом:
- если текущее значение сигнала управления sign превышает установленное значение liml, но не достигает установленного значения lim2, происходит перекладка руля со скоростью νar, которая пропорциональна текущему значению сигнала управления sign;
- если текущее значение сигнала управления sign становится больше значения lim2, скорость изменения положения руля νar достигает максимума νarmax и остается равной этому значению до момента окончания перекладки руля. Возникает так называемая зона насыщения, при этом само положение руля не должно превысить своего предельного значения, в данном случае - максимального угла перекладки руля αrmax.
Угол перекладки руля αr считается положительным при его перекладке в сторону правого борта судна и отрицательным в сторону левого борта. Таким же образом определяют и знак скорости перекладки νar: νar>0 при перекладке руля в сторону правого борта и νar<0 при перекладке руля в сторону левого борта, это демонстрируется асимметрией графика зависимости νar(sign) (Фиг. 6).
Моментом выхода судна с ЗТД считается момент прихода его ЦТ G в конечную точку ЗТД, т.е. в заданную точку траектории ЗТТ2. Этот момент фиксируется выполнением условия равенства текущих координат ЦТ и ЗТТ(2), то есть x0G=x02, y0G=y02.
Отличительными признаками предлагаемого способа от указанного выше известного, наиболее близкого к нему, являются следующие:
дополнительно устанавливают момент начала движения судна по ЗТД: моментом начала движения судна по ЗТД является момент выхода ЦТ судна G в ЗТТ(1). Этот момент фиксируется выполнением условия равенства текущих координат ЦТ и ЗТТ(1), то есть x0G=x01, y0G=y01. Управление движением судна по ЗТД ведется по величинам поперечных отклонений двух точек ДП судна, носовой F и кормовой Л, от ЗТД, представляющей собой дугу окружности. Для определения поперечных смещений носовой F и кормовой Л точек судна их координаты в неподвижной координатной системе F(x0F, y0F), A(x0A, y0A) измеряют с помощью спутниковой навигационной системы (СНС) с дифференциальными поправками [2]. Отклонения носовой dF и кормовой dA точек судна от ЗТД, представляющей дугу окружности с заданным центром С (x0C, y0C) и радиусом RC, вычисляют по формулам (4). С помощью найденных таким образом отклонений dF, dA вырабатывается сигнал sign для системы управления рулевым устройством в виде зависимости, представленной формулой (5). По значению сигнала sign вырабатывается команда на рулевое устройство, определяющая скорость его перекладки νR по нелинейному закону, задаваемому алгоритмом (6).
Наличие полученных указанным способом данных, позволяет осуществлять движение судна по ЗТД до момента выхода с ЗТД, при этом моментом выхода судна с ЗТД считают момент прихода его ЦТ G в конечную точку ЗТД, т.е. в заданную точку траектории ЗТТ2. Этот момент фиксируется выполнением условия равенства текущих координат ЦТ и ЗТТ(2), то есть x0G=х02, y0G=y02:
I-ый этап - выход судна в ЗТТ(1) (Фиг. 5).
II-ой этап - движение по ЗТД (см. Фиг. 4).
Использование предлагаемого способа управления судном при выполнении движения по заданной траектории ЗТД, являющейся дугой окружности, позволяет соблюсти условия безопасного выполнения движения судна по ЗТД с учетом радиуса окружности RC и координат ее центра С (x0C, y0C).
Предлагаемый способ управления судном при движении по ЗТД иллюстрируется чертежами, представленными на фиг. 1-6, где:
фиг. 1 - Заданная траектория движения ЗТД в виде окружности,
фиг. 2 - Сближение с заданной точкой ЗТ (позиция 6),
фиг. 3 - Определение координат центра тяжести ЦТ судна с использованием координат его носовой F и кормовой А точек,
фиг. 4 - Этапы движения судна по заданной траектории движения ЗТД в виде окружности,
фиг. 5 - I-ый этап движения судна по заданной траектории движения ЗТД - выход на заданную траекторию сближения,
фиг. 6 - Закон изменения скорости перекладки руля νr в зависимости от выработанного сигнала sign с зонами нечувствительности и насыщения.
Предлагаемый способ осуществляется следующим образом.
В пределах контура судна, в его диаметральной плоскости (ДП) 1 выбирают две точки, одна из которых находится в носу F, другая - в корме А (фиг. 3), относительно мидель-шпангоута судна. Расстояние между точками F и А выбирают в зависимости от технической возможности размещения в указанных точках приемных антенн СНС. Чем больше это расстояние, тем качественней работа системы управления движением судна, осуществляющего движение по заданной траектории движения (ЗТД) 2.
Координаты точек F, А в неподвижной координатной системе определяют непрерывно с высокой точностью (±1,0 м), это стало возможным с введением в СНС береговых станций, вычисляющих и передающих на суда дифференциальные поправки [2]. Используя значения координат точек судна F(x0F, y0F), А(x0A, y0A) в неподвижной координатной системе, а также координаты тех же точек в подвижной системе координат X,Y, связанной с судном F(xF, yF), А(хА, yA), рассчитывают координаты ЦТ судна в связанной с ним подвижной координатной системой G (xG, yG) по формулам (1). Координаты исходной первой заданной точки траектории (ЗТТ(1)) 3 определяют используя аналитическое выражение для кривой ЗТД 2, заданной функцией (2).
Зная координаты первой исходной заданной точки траектории 3 (ЗTT(1) (х01, y01) и текущие координаты ЦТ судна G (x0G, y0G), определяют текущее положение линии пути 4 (ЛП), проходящей через первую заданную точку 3 (ЗTT(1) и ЦТ судна G. После этого определяют поперечные смещения точек F и А от найденной указанным способом линии пути (ЛП) 4 по формулам:

Непрерывно определяемые значения координат точек F и А, позволяют непрерывно вычислять текущие координаты ЦТ G судна поперечные смещения dF и dA точек F и А судна от текущего положения линии пути 4 (ЛП). Причем, поперечное смещение рассматриваемой точки относительно текущего положения ЛП 4 считается положительным, если она смещается вправо от ЛП 4 и отрицательным, если она смещается влево.
Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например, руля судна, по закону (5).
Движение по ЛП 4 продолжается до момента выхода ЦТ G судна в первую заданную точку траектории 3 (ЗТТ(1)), что является моментом начала движения судна по заданной траектории движения (ЗТД) 2 дуге окружности с радиусом RC и центром С, расположенным в точке с координатами (x0C, y0C). Этот момент фиксируется выполнением условия равенства текущих координат ЦТ судна G и первой заданной точки траектории 3 (ЗTT(1)), то есть x0G=x01, y0G=y01. Управление движением судна по заданной траектории движения 2 (ЗТД) ведется по величинам поперечных отклонений двух точек ДП 1 судна, носовой F и кормовой А, от ЗТД 2, представляющей собой дугу окружности. Для определения поперечных смещений носовой F и кормовой А точек судна их координаты в неподвижной координатной системе F(x0F, y0F), А(x0A, y0A) измеряют с помощью спутниковой навигационной системы СНС с дифференциальными поправками [2]. Отклонения носовой dF и кормовой dA точек судна от заданной траектории движения 2 (ЗТД), представляющей дугу окружности с заданным центром С (x0C, y0C) и радиусом RC, вычисляют по формулам (4). С помощью найденных таким образом отклонений dF, dA вырабатывается сигнал sign для системы управления рулевым устройством в виде зависимости, представленной формулой (5). По значению сигнала sign вырабатывается команда на рулевое устройство, определяющая скорость его перекладки νR по нелинейному закону, задаваемому алгоритмом (6).
Наличие полученных указанным способом данных, позволяет осуществлять движение судна по заданной траектории движения 2 (ЗТД) до момента выхода с ЗТД 2, при этом моментом выхода судна с ЗТД 2 считается момент прихода его ЦТ G в конечную точку заданной траектории движения 2 (ЗТД), т.е. в заданную точку траектории 5 (ЗТТ(2)). Этот момент фиксируется выполнением условия равенства текущих координат ЦТ G и ЗТТ(2), то есть x0G=x02, y0G=y02.
В результате применения данного изобретения достигается возможность получения технического результата - повышение энергоэффективности управления судном при движении по заданной траектории движения 2 (ЗТД), представляющей собой дугу окружности, за счет упрощения алгоритма управления движением по отклонениям носовой dF и кормовой dA точек судна от ЗТД 2, таким образом, предлагаемый способ управления судном при движении по заданной траектории движения 2 (ЗТД) соответствует критерию патентоспособности «промышленная применимость». Список литературы.
1. Бирюков, Н.В. Кораблевождение / Н.В. Бирюков, А.С. Денисов, Я.А. Ковалев // Учеб. для ВВМУ. - М.: Военное изд-во, 1986. - 471 с.
2. Липкин И.А. Спутниковые навигационные системы. - М.: Вузовская книга, 2001. - 215 с.
3. Пат. 2356784 Российская Федерация, МПК7 В63Н 25/00 (2006.01). Способ управления движением объекта при выполнении им сближения с другим подвижным объектом / Юдин Ю.И., Пашенцев С.В.; заявитель и патентообладатель Мурм. гос. техн. ун-т.- №2006111031/11; заявл. 05.04.2006; опубл. 27.05.2009, Бюл. №15. - 6 с.
4. Пат. 2713434 Российская Федерация, МПК7 В63Н 25/00. Способ управления судном при выполнении движения по заданной траектории / Юдин Ю.И., Дабижа Б.В., Висков А.Ю.; заявитель и патентообладатель Гос. морской ун-т им. адм. Ф.Ф. Ушакова. - №2019109888; заявл. 03.04.2019; опубл. 05.02.2020, Бюл. №4. - 7 с.
5. Юфа, А.Л. Автоматизация процессов управления маневрирующими надводными объектами /А.Л. Юфа. - Л.: Судостроение, 1987. - 288 с.
Изобретение относится к водному транспорту и касается управления движением судна по величине поперечных смещений его носовой и кормовой точек от заданной траектории движения (ЗТД). При выходе судна в заданную исходную точку ЗТД, движение судна осуществляют по линии пути, текущее положение которой определяют в виде прямой линии, проходящей через две точки на плоскости, одна из указанных точек - это центр тяжести судна, вторая - заданная исходная точка ЗТД судна; при движении судна по ЗТД, являющейся дугой окружности, поперечные смещения носовой и кормовой точек от ЗТД определяют с использованием значений координат носовой и кормовой точек судна, координат центра окружности и радиуса окружности. Технический результат заключается в совершенствовании управления судном, выполняющим движение по ЗТД, являющейся дугой окружности, по величине поперечных смещений двух точек судна, носовой F и кормовой А, от ЗТД, положение которой в неподвижной координатной системе определяется координатами центра окружности и ее радиусом и тем самым обеспечивается энергоэффективность управления движением судна по ЗТД за счет упрощения алгоритма управления. 5 з.п. ф-лы, 6 ил.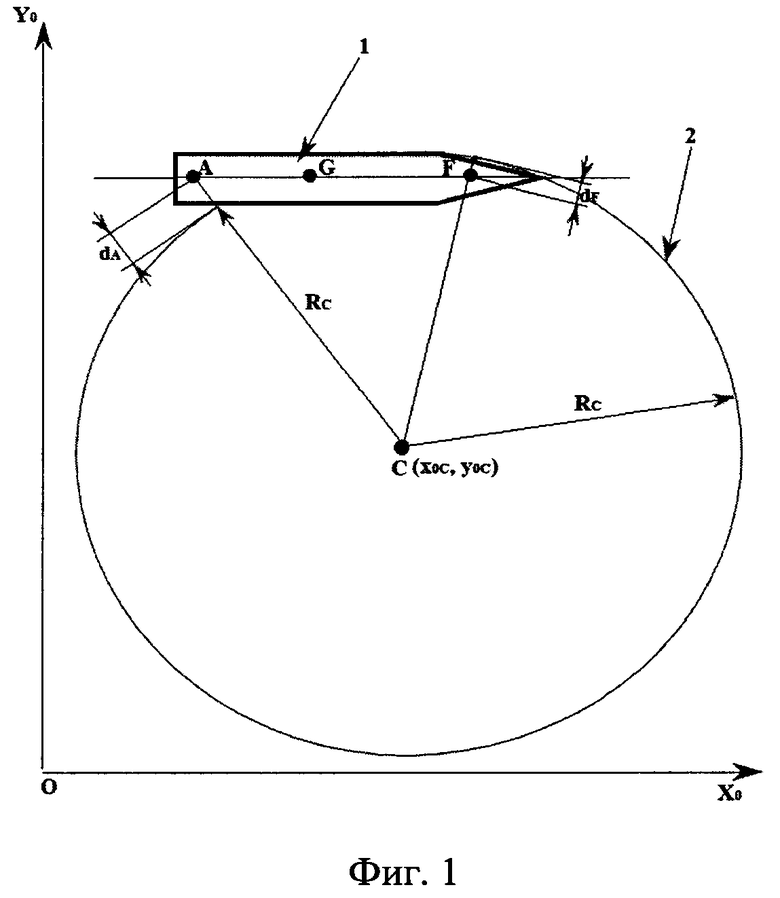
1. Способ управления судном при выполнении движения по заданной траектории по величинам поперечных смещений, расположенных на диаметральной плоскости (ДП) судна носовой F и кормовой А точек от текущего положения заданной линии пути (ЛП), при котором рассчитывают поперечные смещения этих точек, для вычисления поперечных смещений носовой F и кормовой А точек судна их координаты в неподвижной координатной системе F(x0F, y0F), А(x0A, y0A) измеряют с помощью спутниковой навигационной системы (СНС) и с дифференциальными поправками, перекладку руля судна производят в зависимости от комбинации поперечных смещений носовой dF и кормовой dA точек судна относительно текущего положения ЛП, которое определяют используя исходную заданную точку траектории (ЗТТ(1)) как объект, с которым происходит сближение судна и центр тяжести (ЦТ) судна; положение ЗТТ(1) и текущее положение ЦТ судна определяют текущее положение ЛП, проходящей через две точки в виде прямой линии, соединяющей положение исходной заданной точки ЗTT(1) и текущее положение ЦТ судна G, текущие координаты ЦТ судна в неподвижной координатной системе рассчитывают по формулам:
координаты исходной заданной точки ЗТТ(1) определяют как координаты точки кривой, описывающей ЗТД уравнением у0=f(x0); определяют положения линии пути ЛПi, где i=1, 2, …, n, n - количество этапов движения по ЗТД, на каждом этапе движения судна по ЗТД координатами двух заданных точек траектории ЗТТ, например, 1-й ЗТТ(1) (х01, y01) и 2-й ЗТТ(2) (х02, y02), при этом координаты исходной заданной точки первой ЗТТ(1) соответствуют координатам точки ЗТД в момент начала движения судна по ЗТД, координаты каждой следующей ЗTT(i) определяют как координаты точки пересечения двух кривых, а именно кривой ЗТД, заданной аналитически в координатной системе X0,Y0 в виде функции у0=f(x0) и дуги окружности заданного радиуса R(i) с центром, расположенным в предыдущей ЗTT(i), значение радиуса Ri указанной окружности рассчитывается для каждой отдельной ЛПi исходя из кривизны ЗТД на данном этапе движения, размерных характеристик судна и скорости его движения, наличие полученных указанным способом данных позволяет осуществлять движение судна по ЗТД в несколько этапов, количество которых n определяется количеством секущих кривой ЗТД, определяющих положения ЛПi при движении судна от ЗТТ(1) до ЗТТ(1)ЗТTi+1 до окончания движения по ЗТД:
I этап - выход судна в первую ЗТТ(1), выбираем исходную (первую) ЗТТ(1), т.е. точку выхода судна на ЗТД, определяем ее координаты (x01, y01) в неподвижной координатной системе X0,Y0, зная координаты ЦТ судна в неподвижной координатной системе G(x0G, y0G) на момент начала движения для выхода на ЗТД и координаты первой ЗТТ(1) (x01, y01) определяем начальное положение ЛП, по которой судно начинает движение для выхода в первую ЗТТ(1), при этом положение этой ЛП на плоскости X0,Y0 будет меняться в процессе сближения судна с первой ЗТТ(1), так как будет меняться положение ЦТ судна в процессе его движения в первую ЗТТ(1), в процессе движения судна в первую ЗТТ(1) по рассчитанной ЛП, управление судном осуществляется по отклонениям dF, dA носовой F(xF, yF) и кормовой А(хА, yA) точек судна от заданной ЛП;
II этап - движение по ЛП(1), до момента прихода в первую ЗТТ(1) рассчитываем первый радиус окружности R(1) с центром в первой ЗТТ(1) (в данном случае центр окружности имеет координаты x01, y01) и определяем координаты следующей ЗТТ(2)(х02, y02) как точки пересечения дуги окружности радиусом R(1) с кривой ЗТД, строим первую секущую кривой ЗТД, то есть первую линию пути ЛП(1), которая будет проходить через первую ЗTT(1) и вторую ЗТТ(2), являющуюся точкой пересечения дуги окружности заданного радиуса и кривой ЗТД, моментом окончания сближения судна с первой ЗТТ(1), равно как и моментом начала движения судна по первой линии пути ЛП(1), является момент выхода носовой точки F на первую линию пути ЛП(1), этот момент фиксируется выполнением условия равенства нулю расстояния dF от носовой точки судна F до линии пути ЛП(1), аналогичным образом определяется момент начала движения по всем следующим ЛП(i), алгоритм управления движением судна по ЗТД на всех следующих этапах аналогичен алгоритму, применяемому на II этапе, при этом выходом судна с ЗТД считается момент прихода его ЦТ в ЗТТn, отличающийся тем, что управление движением судна по ЗТД ведут по величинам поперечных отклонений двух точек ДП судна, носовой F и кормовой А, от ЗТД, представляющей собой дугу окружности, для определения поперечных смещений носовой F и кормовой А точек судна их координаты в неподвижной координатной системе F(x0F, y0F), А(x0A, y0A) измеряют с помощью спутниковой навигационной системы (СНС) с дифференциальными поправками, отклонения носовой dF и кормовой dA точек судна от ЗТД, представляющей дугу окружности, определяют с учетом координат центра окружности С (x0C, y0C) и ее радиуса RC, с помощью найденных таким образом отклонений dF, dA вырабатывается сигнал управления (sign) для системы управления рулевым устройством, по текущему значению сигнала sign вырабатывается команда на рулевое устройство, определяющая скорость его перекладки νR по нелинейному закону, наличие полученных указанным способом данных позволяет осуществлять движение судна по ЗТД до момента выхода с ЗТД:
I этап - выход судна в ЗТТ(1), выбираем исходную первую заданную ЗTT(1), т.е. точку выхода судна на ЗТД, определяем ее координаты (x01, y01) как координаты точки окружности в неподвижной координатной системе X0, O, Y0, зная координаты ЦТ судна в неподвижной координатной системе G(x0G, y0G) и координаты первой ЗТТ(1) (x01, y01), определяем положение ЛП, по которой судно осуществляет движение для выхода в первую ЗТТ(1), в процессе движения судна в первую ЗТТ(1) по рассчитанной ЛП, управление судном осуществляют по отклонениям двух разнесенных по длине судна точек: носовой F(x0F, y0F) и кормовой А(x0A, y0A), а моментом окончания сближения судна с первой ЗТТ(1), равно как и моментом начала движения судна по ЗТД, является момент выхода ЦТ судна G в ЗТТ(1); этот момент фиксируется выполнением условия равенства текущих координат ЦТ и ЗТТ(1), то есть x0G=х01, y0G=y01;
II этап - движение по ЗТД, управление движением судна по ЗТД ведут по величинам поперечных отклонений двух точек ДП судна, носовой F и кормовой А, от ЗТД, представляющей собой дугу окружности, для определения поперечных смещений носовой F и кормовой А точек судна их координаты в неподвижной координатной системе F(x0F, y0F), А(x0A, y0A) измеряют с помощью спутниковой навигационной системы (СНС) с дифференциальными поправками, вычисляют отклонения носовой dF и кормовой dA точек судна от ЗТД, представляющей дугу окружности с заданным центром С (x0C, y0C) и радиусом RC, с помощью найденных таким образом отклонений dF, dA вырабатывается сигнал sign для системы управления рулевым устройством, моментом выхода судна с ЗТД считается момент прихода его ЦТ G в конечную точку ЗТД, т.е. в заданную точку траектории ЗТТ(2), этот момент фиксируется выполнением условия равенства текущих координат ЦТ судна и ЗТТ(2), то есть x0G=х02, y0G=y02.
2. Способ по п. 1, отличающийся тем, что координаты первой заданной точки ЗTT(1) (х01, y01), точки входа судна на ЗТД, вычисляют как координаты точки окружности с центром С (x0C, y0C) и радиусом RC.
3. Способ по п. 1, отличающийся тем, что моментом входа судна на заданную траекторию считают момент совпадения координат ЦТ судна G и ЗТТ(1), то есть x0G=x01, y0G=y01.
4. Способ по п. 1, отличающийся тем, что управление движением судна по ЗТД ведется по величинам поперечных отклонений двух точек ДП судна, носовой F и кормовой A от ЗТД, являющейся окружностью с центром С (x0C, y0C) и радиусом RC.
5. Способ по п. 1, отличающийся тем, что управляемым по отклонениям носовой dF и кормовой dA параметром является скорость перекладки руля νR.
6. Способ по п. 1, отличающийся тем, что моментом выхода судна с заданной траектории считают момент совпадения координат ЦТ судна G и ЗТТ(2), то есть x0G=х02, y0G=y02.
| Способ управления судном при выполнении движения по заданной траектории | 2019 |
|
RU2713434C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ОБЪЕКТА ПРИ ВЫПОЛНЕНИИ ИМ СБЛИЖЕНИЯ С ДРУГИМ ПОДВИЖНЫМ ОБЪЕКТОМ | 2006 |
|
RU2356784C2 |
| Способ управления движущимся судном | 2015 |
|
RU2615849C1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |

