Изобретение относится к области судовождения и может быть использовано для повышения безопасности плавания и точности автоматического управления судами, в частности в стесненных навигационных условиях плавания.
Известны способы автоматической проводки судов [1-4], в которых управляющие сигналы, подаваемые на рулевой привод, формируются в зависимости от рассогласования текущих параметров движения и программных. Для получения программных параметров, определяющих положение судна, на традиционной или электронной навигационной карте прокладывается маршрут, определяются координаты поворотных точек маршрута. Текущие координаты судна определяются по спутниковым или радионавигационным системам или посредством навигационных радиолокационных систем [5].
Недостатками известных способов являются:
- сложность прокладки маршрута, подбор карт необходимого масштаба при формировании программных параметров [1];
- отсутствие на участках разворотов заданной траектории, относительно которой определяется боковой снос судна [3];
- определение текущих и программных координат судна производится в разных системах координат [2, 4];
- возможность наличия мертвых зон при использовании навигационной радиолокационной станции, невысокая точность аппроксимированной электронной карты [5].
Выявленных недостатков аналогов лишен способ автоматической проводки судна [6], заключающийся в том, что измеряют текущие параметры движения судна, используя сигналы от датчиков углов курса, руля, угловой скорости и навигационного прибора, при этом сравнивают эти данные с программными значениями и по результатам сравнения формируют управляющий сигнал на рулевой привод. Программные параметры движения, определяющие положение судна, получают путем обработки сигналов о положении судна от навигационного прибора при эталонном проходе судна по заданному маршруту. Технический результат в данном способе, заключающийся в повышении точности управления судном, преимущественно наречных фарватерах и безопасности движения, достигается за счет формирования программы, задающей положение судна, и определение текущих координат судна производится в одной и той же системе координат, так как для формирования программы используется запись текущих координат, определяемых приемником сигналов спутниковой навигационной системы, расположенным на судне, при эталонном проходе судна по заданному маршруту, при этом при обработке записанной информации в результате аппроксимации выделяют прямолинейные участки маршрута и формируют программную ось судового хода, на стыке прямолинейных участков определяют поворотные точки маршрута, относительно которых производится программный разворот (криволинейный участок), при этом криволинейный участок маршрута аппроксимируется дугой определенного радиуса с примыкающими для плавности перехода переходными участками.
Недостатками данного способа являются:
- определение текущих координат и скорости судна посредством приемника сигналов спутниковой навигационной станции, что не всегда может быть обеспечено как по техническим причинам, так и по финансовым соображениям, и, кроме того, в соответствии со стандартом точности судовождения (резолюция ИМО А. 529) точность определения места при плавания в узкости должна составлять 5...10 м, что может быть обеспечено только при использовании приемоиндикатора GPS в дифференциальном режиме при нахождении судна в зоне действия дифференциальной станции, в противном случае предельная погрешность определения координат места для приемоиндикаторов СНС GPS типа "Trimble Navigation", которыми в основном оснащены суда типа река-море, составит 100 м (Р=0,95);
- выделение прямолинейных участков маршрута путем аппроксимации записанной информации для формирования программной оси судового хода, что снижает достоверность получения итоговых данных;
- использование упрощенной модели движения судна в функции радиуса разворота, текущей скорости и времени, без учета влияния параметров ветра, глубины под килем, угла дрейфа, а также текущих значений углов тяги, эксцентриситета и оборотов движителей, оборотов подруливающих устройств, траектории движения центра тяжести, носовой и кормовой оконечности, особенно при проходе участков в стесненных навигационных условиях и при неблагоприятных погодных условиях, может привести к негативным последствиям в результате выполнения маневрирования.
Задачей заявляемою технического предложения является повышение точности управления судном в стесненных навигационных условиях, в том числе и наречных фарватерах путем определения и обработки избыточной и достоверной исходной информации.
Поставленная задача решается за счет того, что в способе автоматической проводки судна, включающем измерение параметров движения датчиками угла курса и угловой скорости, датчиком положения руля и навигационным прибором, определяющим текущее положение судна, их последующее сравнение с программными значениями данных параметров движения и формирование управляющего на рулевой привод в функции данных рассогласований и скорости судна, определяемой навигационным прибором, получение программных параметров движения, определяющих положение судна путем обработки сигналов о положении судна от навигационного прибора, определение программных значений угла курса, угловой скорости, положения руля в соответствии с моделью движения в функции радиуса разворота, текущей скорости и времени, в котором при измерении параметров движения судна датчиками дополнительно измеряют параметры ветра и волнения, углы тяги, эксцентриситет и обороты движителей, обороты подруливающего устройства, глубину под килем, определяют траектории движения центра тяжести, носовой и кормовой оконечностей, а программные значения угла курса, угловой скорости, положения руля определяют в соответствии с моделью движения судна в дополнительной функции скорости и направления ветра, высоты и курсового угла волн, углов тяги, эксцентриситета и оборотов движителей, оборотов подруливающего устройства, глубины под килем, траектории движения центра тяжести, носовой и кормовой оконечностей и углов дрейфа и сноса.
В отличие от известных способов автоматической проводки судна, в предлагаемом способе при измерении параметров движения дополнительно измеряют параметры ветра и волнения, углы тяги, эксцентриситет и обороты движителей, обороты подруливающего устройства, глубину под килем, определяют траектории движения центра тяжести, носовой и кормовой оконечностей, а программные значения угла курса, угловой скорости, положения руля определяют в соответствии с моделью движения судна в дополнительной функции скорости и направления ветра, высоты и курсового угла волн, углов тяги, эксцентриситета и оборотов движителей, оборотов подруливающего устройства, глубины под килем, траектории движения центра тяжести, носовой и кормовой оконечностей и углов дрейфа и сноса.
Так как при плавании судна на него практически всегда воздействуют внешние факторы, такие как ветер, волнение, течение и мелководье, эти факторы оказывают неблагоприятное влияние на судно. Так, степень и характер воздействия ветра зависит от таких параметров, как площадь парусности судна, расположение центра тяжести, отношения высоты борта к осадке судна, силы ветра и его направления относительно диаметральной плоскости, курса судна относительно направления ветра и скорости судна. При этом возможны такие последствия, как увеличение крена, дрейфа и осадки, изменение скорости, потеря управляемости. При влиянии течения возможно изменение скорости и траектории движения. При волнении изменяются скорость, траектория движения, осадка. При влиянии мелководья ухудшается остойчивость, увеличивается рыскливость и осадка, наблюдается потеря скорости. Кроме того, при проходе узкостей необходимо определение ширины безопасной полосы движения, которая, исходя из практики судовождения по осевой линии канала или фарватера Вб.д., принимается как: Вб.д.=Вм+В, где В - маневровая полоса движения судна, В - ширина судна.
Ширина маневренной полосы при воздействии течения, ветра и волнения определяется в соответствии с зависимостью:
Вм=LSin(α1+α2+α3)+BCos(α1+α2+α3)+Vсt+Sinβ+ΔВ, где L - длина судна по ватерлинии, В - ширина судна по мидель-шпангоуту, α1 - угол сноса от течения, α2 - угол ветрового дрейфа, α3 - угол ветрового сноса, Vc - скорость судна, t - период рыскания, β - угол рыскания, ΔВ - запас ширины, учитывающий эффект присасывания к стенкам канала, принимаемый равным ширине судна В. Однако эта поправка не всегда является достоверной. В случаях, когда фарватер естественных глубин не является каналом полного профиля и, большей частью, не имеет резко выраженной бровки, например, каналы в устье рек, перегороженные баром, то величина уменьшения этой поправки, а следовательно, и ширина полосы безопасного движения может достигать трети ширины судна. И если значения угла сноса могут быть определены в зависимости от соотношения скоростей и судна и курсового угла течения с вводом корректирующих коэффициентов, а если забровочная глубина меньше осадки судна, то скорость течения корректируется еще одним коэффициентом, учитывающим экранирующее влияние стенок прореди, а также значения угла ветрового дрейфа, которые определяются в зависимости от соотношения площадей парусности надводного и подводного бортов, курсового угла ветра и соотношения скорости ветра к скорости судна, при этом величина угла дрейфа также корректируется еще одним коэффициентом, который зависит от запаса воды под корпусом судна, то волновой угол сноса движущегося судна, зависящий от соотношения скоростей волнового сноса судна и скорости судна (определяемой по навигационному прибору или лагу), требует определения скорости волнового сноса, которая связана с определением и учетом величины составляющей волновой нагрузки, курсового угла волны к диаметральной плоскости судна, сопротивления воды движению судна, времени с носа судна, длины и высоты волны. При этом необходимо учитывать различные коэффициенты, большинство из которых определяется по аналитическим зависимостям с множеством допущений, что существенно усложняет процесс получения конечных результатов с приемлемой степенью точности.
В конечном итоге, безопасность плавания в узкостях во многом зависит от обеспечения надежной оценки конкретной ситуации и выработки основных решений при автоматической проводке судна с учетом реальной структуры ветроволновых возмущений трансформации ветрового поля около судна за счет процессов дифракции и интерференции судовых и набегающих волн, особенностей динамики взаимодействия судна с внешней средой в реальных условиях плавания, что позволит осуществить выбор оптимального курсового угла и скорости судна исходя из обеспечения требований к остойчивости, качке, ходкости и прочности на волнении, оценку и прогноз потери скорости судна при обрастании корпуса, оценку влияния мелководья, особенно при плавании вне зоны действия дифференциальной станции СНС.
Кроме того, установление эталонных параметров для последующего определения программных значений требует существенного периода времени и сложного внешнего обеспечения для исключения случайных погрешностей и определения систематических погрешностей, а с учетом того, что реальные условия плавания могут существенно отличаться от условий, при которых получены эталонные значения, то достоверность определения программных значений может оказаться невысокой, что подтверждают результаты выполненных исследовании для судов типа "река-море" при плавании как на открытой воде, так и при заходе в устье реки по фарватерам, проходящим по каналам как полного профиля, так и по каналам, не являющимися каналами полного профиля. Натурные наблюдения показали, что реальная ширина полосы безопасного движения может меняться в широких пределах. Так, если при проходе узкостей судно находится в зоне действия дифференциальной станции спутниковой навигационной системы, то точность координирования по системам HABCTAP/ГЛОНАСС составляет менее 5 метров, и ширина полосы безопасного движения судна, с учетом правильно определенных его маневренных характеристик дня данных условий плавания, может быть определена с достаточной степенью достоверности. В противном случае, вне зоны действия дифференциальной станции, точность координирования может быть получена с предельной погрешностью определения координат места порядка 100 метров (приемоиндикатор типа "Trimble Navigation" спутниковой навигационной системы GPS, которым оснащены суда смешанного плавания типа "Омский"), что явно недостаточно для координирования и не соответствует требованиям стандарта точности судовождения (Резолюция ИМО А.529) при плавании в узкости (точность определения места судна 5...10 м, дискретность определения места судна - непрерывно) и при подходах к портам и узкостям (точность определения места судна 50...100 м, дискретность определения места - непрерывно).
На чертеже приведена блок-схема устройства, посредством которого реализуется заявляемый способ. Блок-схема включает приемоиндикатор 1 сигналов спутниковой навигационной системы, гирокомпас 2, навигационную РЛС 3, лаг 4, эхолот 5, центральный процессор 6 контроллер 7, дисплей 8, электронную картографическую навигационную систему 9, измеритель параметров ветра 10, измеритель параметров волнения 11, блок управления 12, рулевой датчик 13, рулевое устройство 14, рулевой механизм 15, руль 16, аппаратные средства 17 программного обеспечения авторулевого, подруливающее устройство 18, блок датчиков динамических параметров 19.
Для учета ветровых возмущений посредством судовых измерителей ветра типа КИВ-2 или ИПВ-92 измеряют скорость и направление ветра. Для получения наиболее полной информации о параметрах воздушного потока выполняют измерение невозмущенного потока в носовой или кормовой оконечностях судна в зависимости от направления ветра, а также на уровне возможной максимально высокой точки над ходовой рубкой. Затем определяют сдвиг ветра между уровнями палубы и максимально высокой точкой над ходовой рубкой. Так как судовые измерители ветра измеряют среднюю скорость ветра на разной высоте, то в навигационном приборе средние значения ветра моделируются логарифмическим профилем в соответствии с зависимостью:
 , где
, где  U10 - средние скорости ветра соответственно, измеренные на высотах H и 10 м,
U10 - средние скорости ветра соответственно, измеренные на высотах H и 10 м,  ho - коэффициент шероховатости, зависящий от состояния водной поверхности (0,1...1,4 м), а также определяется спектральная плотность случайной составляющей атмосферной турбулентности
ho - коэффициент шероховатости, зависящий от состояния водной поверхности (0,1...1,4 м), а также определяется спектральная плотность случайной составляющей атмосферной турбулентности
 , где ω - частота, Vc - скорость судна (приборная), σ1(σхд, σуд, σzд,) - интенсивности (средние квадратические отклонения) продольной, поперечной и вертикальной составляющих турбулентности, L1(Lхд, Lуд, Lzд) - масштабы соответствующих составляющих турбулентности. При этом величины σ1 определяются в зависимости от состояния атмосферы, близкого к нейтральному или неустойчивому, что позволяет определить сдвиги ветра по критериям интенсивности и их влияние на управление судном и в конечном итоге исключить влияние сдвига ветра на движение судна, заключающегося в том, что при резком изменении движения потока вдоль траектории движения путевая скорость вследствие инерции некоторое время сохранится, в то время как приборная скорость резко изменится, что незамедлительно приведет к соответствующему изменению подъемной силы, поскольку она прямо пропорциональна квадрату воздушной скорости. Боковые сдвиги ветра, направленные поперек траектории движения и вызванные чаще всего резкими изменениями направлений ветра, вызывают боковое смещение судна, что весьма нежелательно при прохождении узкостей, так как это может привести к увеличению ширины безопасной полосы движения.
, где ω - частота, Vc - скорость судна (приборная), σ1(σхд, σуд, σzд,) - интенсивности (средние квадратические отклонения) продольной, поперечной и вертикальной составляющих турбулентности, L1(Lхд, Lуд, Lzд) - масштабы соответствующих составляющих турбулентности. При этом величины σ1 определяются в зависимости от состояния атмосферы, близкого к нейтральному или неустойчивому, что позволяет определить сдвиги ветра по критериям интенсивности и их влияние на управление судном и в конечном итоге исключить влияние сдвига ветра на движение судна, заключающегося в том, что при резком изменении движения потока вдоль траектории движения путевая скорость вследствие инерции некоторое время сохранится, в то время как приборная скорость резко изменится, что незамедлительно приведет к соответствующему изменению подъемной силы, поскольку она прямо пропорциональна квадрату воздушной скорости. Боковые сдвиги ветра, направленные поперек траектории движения и вызванные чаще всего резкими изменениями направлений ветра, вызывают боковое смещение судна, что весьма нежелательно при прохождении узкостей, так как это может привести к увеличению ширины безопасной полосы движения.
В известных способах автоматической проводки судна, если и учитывается влияние ветра на движение судна, то для преобразования частоты переменных составляющих скорости ветра, как правило, используют гипотезу Тейлора о "замороженном" поле скоростей, которая применима при скоростях движения судна выше средней скорости ветра, или используют результаты продувки модели судна в аэродинамической трубе. Однако при движении судна со средней скоростью и курсовым углом по направлению к бегу волн и генеральному направлению ветра спектральные характеристики воздействий от переменных составляющих скорости ветра будут иными, чем спектры возмущений, действующих на неподвижный объект.
Так как морское волнение является наиболее существенным возмущающим фактором для судов как объектов управления, ухудшающим функциональную эффективность и безопасность, то посредством когерентной навигационной радиолокационной станции или специальных устройств измеряются параметры волнения (см. например: 1. Загородников А.А. Радиолокационная съемка морского волнения с летательных аппаратов. Л.: Гидрометеоиздат, 1978, с.148-150. 2. Ванаев А.П., Чернявец В.В. Определение параметров волнения совмещенной системой измерения скорости судна и высоты волны //Л.: Судостроение, 1993, №8-9. 3. Патент РФ №2137153). При этом на основе текущих измерений профиля волн определяются такие их интегральные характеристики, как средние значение высоты и периода, курсовой угол основного направления движения волн, скорость и длина волн, что позволяет сформировать сигнал волнового возмущения для использования в авторулевом, определить параметры волнения дня решения задачи оптимизации курса и скорости судна на волнении, определит параметры качки, крен и дифферент судна, его осадку на ходу. Определение параметров ветра и волнения позволяет автоматизировать процесс определения волнового запаса на погружение оконечности судна при волнении в зависимости от длины судна, числа Фруда, высоты волны 3% обеспеченности в системе волн наиболее опасного направления в районе судового хода при действии ветра, а также скоростной запас на изменение осадки судна на ходу и запас на крен судна, возникающий от воздействия ветра и гидродинамических сил на повороте, зависящих от ширины судна, крена от ветра и крена судна на повороте, а в конечном итоге определить суммарный навигационный запас глубины при проходе мелководных участков с учетом минимального навигационного запаса, необходимого для обеспечения управляемости судна в соответствии с известными зависимостями (см., например: РД 31.31ю47-88 "Нормы проектирования морских каналов", М., 1988). Ввиду того, что обозначенная глубина на навигационных картах, являющихся основой для установления программных значений, может отличаться от реальных глубин, особенно в устье рек с небольшой интенсивностью судоходства и постоянно или периодически переграждаемых барами, а промеры и последующие дноуглубительные работы, в нынешних условиях выполняются нерегулярно, то для контроля реальных глубин с устройства, представляющего собой эхолот или эхолокатор бокового обзора, измеренные значения глубин под килем, а также сигналы, характеризующие профиль рельефа дна с эхолокатора, транслируются на навигационный прибор, в котором после соответствующей обработки транслируются на электронную картографическую навигационную систему (ЭКНИС), на которую также транслируются значения координат от приемоиндикатора спутниковой навигационной системы или координаты, полученные по счислению (приборная скорость, курсовой угол), данные от навигационной РЛС при прибрежном плавании, и которая содержит банк данных навигационных карт в электронном виде в форматах, соответствующих стандартам ИМО и Главного управления навигации и океанографии РФ, с возможностью их корректуры по измеренным текущим значениям навигационных параметров, что позволяет устанавливать программные параметры с повышенной степенью достоверности.
Одновременный вывод на ЭКНИС программных и текущих навигационных параметров, радиолокационных сигналов, картографической информации и изменения динамических параметров судна в реальный момент плавания позволяет получить избыточность информации для формирования сигналов управления движением судна с учетом конкретных условий плавания.
В предлагаемом способе математическая модель судна включает уравнения, позволяющие выполнить условия устойчивости или неустойчивости по Ляпунову, соответствующие реальной физической системе, и описывает движение судна в горизонтальной плоскости (курс, угловая скорость продольная и поперечная составляющие скорости) и вертикальной плоскости (линейные скорости и ускорения) с учетом ветро-волновых возмущений, навигационных датчиков и рулевого привода.
Система уравнении движения судна содержит динамические уравнения, описывающие движение его характерной точки (полюса), динамические уравнения, описывающие движение судна относительно полюса, кинематические уравнения связи угловых и линейных скоростей с угловыми и линейными координатами, вспомогательные уравнения связи между различными системами координат выражения для проекций сил и моментов.
В состав математических алгоритмов авторулевого входят алгоритмы управления рулевым приводом, алгоритмы управления угловой скоростью; алгоритмы управления курсом в режимах точной стабилизации и экономического хода, в грузе и балласте; алгоритмы маневрирования курсом; алгоритмы управления движением по маршруту; алгоритмы восстановления фильтрации параметров движения; алгоритмы адаптации, которые обеспечивают стабилизацию судна на заданном курсе, маневрирование курсом, восстановление и фильтрацию угловой скорости судна, адаптацию параметров регуляторов авторулевого. При этом стабилизация (удержание) курса судна осуществляется при движении в открытом море и при движении в узкостях и при наличии навигационных опасностей, маневрирование курсом осуществляется в режимах стабилизации заданной угловой скорости, перевода на новый курс с заданной угловой скоростью или радиусом поворота, движении по маршруту, задаваемому последовательностью точек поворота, алгоритмы восстановления фильтрации угловой скорости обеспечивают минимизацию кладок руля при интенсивных волновых возмущениях, адаптация регуляторов авторулевого производится по скорости хода судна, глубине под килем, гидрометеорологическим условиям, загрузке судна, алгоритмы авторулевого обеспечивают управление при заданных предельно допустимых угле перекладки руля и угловой скорости судна, и сигнализацию при потере заданной точности стабилизации курса. Программное обеспечение авторулевого функционирует на аппаратных средствах, представляющих собой микро-ЭВМ, объединенных системой обмена информацией с подключенной к ним группой адаптеров для стыковки с навигационными датчиками, датчиками измерения динамических параметров и рулевым приводом.
Способ реализуется как на штатных, так и принятых на снабжение судовых технических средствах навигации и управления движением. Программное обеспечение позволяет реализовать способ практически для любого класса судов.
Источники информации
1. Патент Японии №62-45119.
2. Патент США №3946690 А.
3. Патент РФ №2150409.
4. Патент Японии №62-3459.
5. Пирогов Н.Н., Чернявец В.В. Навигационный комплекс для катеров на подводных крыльях. Зарубежное военное обозрение, №4, 1986, с.58-59.
6. Патент РФ №2207296 С2.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| СПОСОБ ВИЗУАЛИЗАЦИИ НАВИГАЦИОННОЙ ОБСТАНОВКИ ПРИ СУДОВОЖДЕНИИ | 2005 |
|
RU2281529C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПОСОБ ПРЕДСТАВЛЕНИЯ СУДОВОДИТЕЛЮ ОБОБЩЕННОЙ ИНФОРМАЦИИ ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2006 |
|
RU2334996C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| Способ натурных испытаний безэкипажных судов | 2022 |
|
RU2797701C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2005 |
|
RU2279039C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| Система прогнозирования безопасного расхождения судов | 2022 |
|
RU2780081C1 |
Изобретение относится к судовождению и может использоваться для автоматического управления судами в стесненных условиях навигации. Способ включает в себя измерение параметров движения датчиками угла курса и угловой скорости, датчиком положения руля и навигационным прибором, определяющим текущее положение судна, их последующее сравнение с программными значениями данных параметров движения и формирование управляющего сигнала на рулевой привод в функции данных рассогласований и скорости судна, определяемой навигационным прибором, получение программных параметров движения, определяющих положение судна путем обработки сигналов о положении судна от навигационного прибора, определение программных значений угла курса, угловой скорости, положения руля в соответствии с моделью движения в функции радиуса разворота, текущей скорости и времени. При измерении параметров движения судна датчиками дополнительно измеряют параметры ветра, углы тяги, эксцентриситет и обороты движителей, обороты подруливающего устройства, глубину под килем, определяют траектории движения центра тяжести, носовой и кормовой оконечностей, а программные значения угла курса, угловой скорости положения руля определяют в соответствии с моделью движения судна в дополнительной функции скорости и направления ветра, углов тяги, эксцентриситета и оборотов движителей, оборотов подруливающего устройства, глубины под килем, траекторий движения центра тяжести, носовой и кормовой оконечностей и углов дрейфа и сноса судна. Технический результат реализации изобретения заключается в повышении точности управления судном и повышении безопасности его плавания в стесненных навигационных условиях, в том числе и на речных фарватерах путем определения и обработки избыточной и достоверной исходной информации. 1 ил.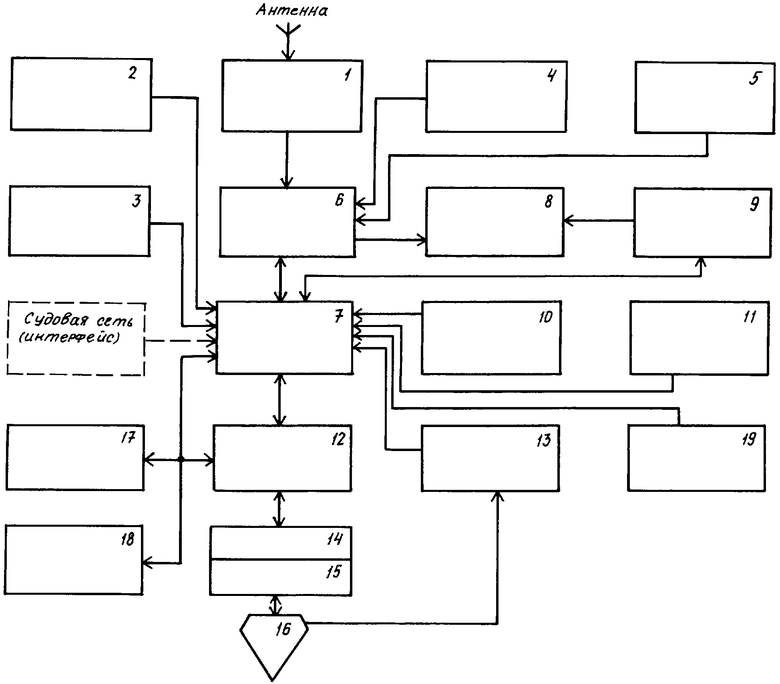
Способ автоматической проводки судна, включающий измерение параметров движения датчиками угла курса и угловой скорости, датчиком положения руля и навигационным прибором, определяющим текущее положение судна, их последующее сравнение с программными значениями данных параметров движения и формирование управляющего сигнала на рулевой привод в функции данных рассогласований и скорости судна, определяемой навигационным прибором, получение программных параметров движения, определяющих положение судна путем обработки сигналов о положении судна от навигационного прибора, определение программных значений угла курса, угловой скорости, положения руля в соответствии с моделью движения в функции радиуса разворота, текущей скорости и времени, отличающийся тем, что при измерении параметров движения судна датчиками дополнительно измеряют параметры ветра, углы тяги, эксцентриситет и обороты движителей, обороты подруливающего устройства, глубину под килем, определяют траектории движения центра тяжести, носовой и кормовой оконечностей, а программные значения угла курса, угловой скорости и положения руля определяют в соответствии с моделью движения судна в дополнительной функции скорости и направления ветра, углов тяги, эксцентриситета и оборотов движителей, оборотов подруливающего устройства, глубины под килем, траекторий движения центра тяжести, носовой и кормовой оконечностей и углов дрейфа и сноса судна.
| 2000 |
|
RU2207296C | |
| US 3946690 А, 30.03.1976 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |

