Изобретение относится к водному транспорту и касается управления швартующимся судном при выполнении им швартовной операции к борту судна-партнера, лежащего в дрейфе.
Известен способ управления швартующимся судном при выполнении им швартовной операции к борту судна-партнера (патент №2422326, опубл. 27.06.2011), когда в пределах контуров швартующегося судна и судна-партнера, в их диаметральных плоскостях выбирают по две точки, одна из которых находится в носу А (швартующееся судно), An (судно-партнер), другая - в корме В (швартующееся судно), Bn (судно-партнер) (фиг.1,2) относительно мидель-шпангоута соответствующего судна.
Координаты точек А, В, An, Bn в неподвижной координатной системе определяют непрерывно с высокой точностью (±1,0 м). Используя значения координат точек А(X0A, Y0A), В(X0B, Y0B) швартующегося судна и судна-партнера An(X0An, Y0An), Bn(X0Bn, Y0Bn) в неподвижной координатной системе, координаты тех же точек в подвижных системах координат, связанных с швартующимся судном А(XA, YA), Bn(ХВ, YB) и судном-партнером An(XAn, YAn), Bn(XBn, YBn), координаты центров тяжести (ЦТ) швартующегося судна в связанной с ним подвижной координатной системе G (XG, YG) и судна-партнера в связанной с ним подвижной координатной системе Gn(X0Gn, Y0Gn) (фиг.3), а также значения расстояния между диаметральными плоскостями (ДП) швартующихся судов h0 и расстояния между ЦТ швартующихся судов m, рассчитывают:
- координаты центра тяжести швартующегося судна G(X0G, Y0G) в неподвижной координатной системе;
- координаты центра тяжести судна-партнера Gn(X0Gn, Y0Gn) в неподвижной координатной системе;
- координаты точек 
- координаты проекции ЦТ судна-партнера 


- координаты второй заданной точки P2(X0P2, Y0P2) в неподвижной координатной системе;
- текущее значение длины тормозного пути швартующегося судна рассчитывают с использованием уравнения его движения dυ/dS=f(υ, C1 C2, C3,…),
где
υ - текущее значение скорости швартующегося судна;
S - путь;
C1, C2, C3,… - текущие значения параметров уравнения движения швартующегося судна, зависящие от текущих значений параметров, характеризующих текущее состояние загрузки судна и внешней среды (водоизмещения швартующегося судна; параметров посадки корпуса; направления и скорости ветра; параметров волнения; направления и скорости течения; глубины акватории в районе выполнения швартовной операции). Текущее значение длины тормозного пути швартующегося судна в процессе его сближения с судном-партнером определяют интегрированием уравнения движения швартующегося судна в пределах от υ=υн до υ=υn, т.е.
где υн - начальная скорость швартующегося судна; υn - скорость судна-партнера.
При этом текущие значения параметров уравнения движения швартующегося судна С1, С2, С3,… в процессе выполнения швартовной операции непрерывно идентифицируют с использованием метода, описанного в работах [5], [6].
- координаты первой заданной точки P1(X0P1, Y0P1) в неподвижной координатной системе.
Зная координаты первой заданной точки и координаты ЦТ швартующегося судна, определяют текущее положение траектории сближения, проходящей через первую заданную точку P1(X0P1 Y0P1) и ЦТ швартующегося судна G(X0G, Y0G). После этого определяют поперечные смещения точек A и B от найденной указанным способом траектории сближения.
Непрерывно определяемые значения координат точек A и B, An и Bn позволяют непрерывно вычислять координаты ЦТ швартующегося судна G, а вместе с непрерывно определяемым текущим значением длины тормозного пути ST - и первой заданной точки P1; а также поперечные смещения dA и dB точек A и B швартующегося судна от текущего положения траектории сближения.
Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например руля швартующегося судна, по закону:
α=-kA×dA+kB×dB,
где kA, kB - коэффициенты усиления по перечным смещениям носовой и кормовой точек швартующегося судна от текущего положения траектории сближения.
Таким образом, швартующееся судно движется по линии GP1 в направлении точки P1.
В момент выхода швартующегося судна в первую заданную точку, что соответствует равенству координат ЦТ швартующегося судна G(X0G, Y0G) и координат первой заданной точки P1(X0G, Y0P1) (X0G=Х0Р1; Y0G=Y0P1), оно переходит к сближению со второй заданной точкой P2, при этом текущее положение траектории сближения соответствует положению линии, проходящей через точки

Постоянно определяемые значения координат точек A и B, An и Bn позволяют непрерывно вычислять: координаты точек 

Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например руля швартующегося судна, по известному закону. Таким образом, швартующееся судно движется в точку Р2 по линии
Момент выхода швартующегося судна во вторую заданную точку P2 соответствует равенству координат ЦТ швартующегося судна и второй заданной точки, то есть X0G=X0P2, Y0G=Y0P2.
Однако в этом способе управления судном, выполняющим швартовную операцию к борту судна-партнера, есть определенный недостаток, не позволяющий безопасно сблизиться швартующемуся судну с судном-партнером, если оно лежит в дрейфе. Направление вектора линейной скорости дрейфующего судна υ' определяется углом дрейфа β' (угол между диаметральной плоскостью судна и вектором линейной скорости судна) (фиг.4), а величина β' может достигать больших значений в пределах от 0 до 180° [1], [3], [4]. Таким образом, в момент выхода швартующегося судна к борту судна-партнера, лежащего в дрейфе, линейная скорость швартующегося судна и должна быть равна продольной составляющей линейной скорости швартующего судна 

Технический результат, на достижение которого направлено заявляемое изобретение, состоит в соблюдении условия движения швартующегося судна в конечной стадии швартовки со скоростью, равной продольной составляющей линейной скорости судна-партнера.
Для достижения указанного технического результата в способе управления швартующимся судном, при выполнении им швартовной операции к борту судна-партнера, когда в пределах контуров швартующегося судна и судна-партнера, в их диаметральных плоскостях выбирают по две точки, одна из которых находится в носу A (швартующееся судно), An (судно-партнер), другая - в корме B (швартующееся судно), Bn (судно-партнер) (фиг.2) относительно мидель-шпангоута соответствующего судна.
Координаты точек A, B, An, Bn в неподвижной координатной системе определяют непрерывно с высокой точностью (±1,0 м). Используя значения координат точек швартующегося судна A(X0A, Y0A), В(X0B, Y0B) и судна-партнера An(X0An, Y0An), Bn(X0Bn, Y0Bn) в неподвижной координатной системе, координаты тех же точек в подвижных системах координат, связанных с швартующимся судном A(ХА, YA), B(XB, YB) и судном-партнером An(XAn, YAn), Bn(XBn,YBn), координаты ЦТ швартующегося судна в связанной с ним подвижной координатной системе G (XG,YG) и судна-партнера в связанной с ним подвижной координатной системе Gn(X0Gn, Y0Gn), а также значения расстояния между ДП швартующихся судов h0 и расстояния между ЦТ швартующихся судов m, рассчитывают:
- координаты центра тяжести швартующегося судна G (X0G, Y0G) в неподвижной координатной системе;
- координаты центра тяжести судна-партнера Gn(X0Gn, Y0Gn) в неподвижной координатной системе;
- координаты точек
- координаты проекции ЦТ судна-партнера


- координаты второй заданной точки P2(X0P2, Y0P2) в неподвижной координатной системе;
- текущее значение длины тормозного пути швартующегося судна рассчитывают с использованием уравнения его движения dυ/dS=f(υ, C1, C2, C3,…),
где
υ - текущее значение скорости швартующегося судна;
S - путь;
C1, C2, C3,… - текущие значения параметров уравнения движения швартующегося судна, зависящие от текущих значений параметров, характеризующих текущее состояние загрузки судна и внешней среды (водоизмещения швартующегося судна; параметров посадки корпуса; направления и скорости ветра; параметров волнения; направления и скорости течения; глубины акватории в районе выполнения швартовной операции).
Отличительным признаком предлагаемого способа от указанного выше известного, наиболее близкого к нему, является следующий:
дополнительно текущее значение длины тормозного пути швартующегося судна в процессе его сближения с судном-партнером определяют интегрированием уравнения движения швартующегося судна в пределах от υ=υн до 
где 
При этом текущие значения параметров уравнения движения швартующегося судна C1, C2, С3,… в процессе выполнения швартовной операции непрерывно идентифицируют с использованием метода, описанного в работах [5], [6];
- координаты первой заданной точки P1(X0P1, Y0P1) в неподвижной координатной системе.
Зная координаты первой заданной точки и координаты ЦТ швартующегося судна, определяют текущее положение траектории сближения, проходящей через первую заданную точку Р1(X0P1, Y0P1) и ЦТ швартующегося судна G(X0G, Y0G). После этого определяют поперечные смещения точек A и B от найденной указанным способом траектории сближения.
Постоянно определяемые значения координат точек A и B, An и Bn позволяют непрерывно вычислять координаты ЦТ швартующегося судна G, а вместе с непрерывно определяемым текущим значением длины тормозного пути ST - и первой заданной точки P1, а также поперечные смещения dA и dB точек A и B швартующегося судна от текущего положения траектории сближения.
Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например руля швартующегося судна, по закону:
α=-kA×dA+kB×dB,
где kA, kB - коэффициенты усиления по перечным смещениям носовой и кормовой точек швартующегося судна от текущего положения траектории сближения.
Таким образом, швартующееся судно движется по линии GP1 в направлении точки P1.
В момент выхода швартующегося судна в первую заданную точку, что соответствует равенству координат ЦТ швартующегося судна G(X0G, Y0G) и координат первой заданной точки P1(X0G, Y0P1) (X0G=Х0Р1; Y0G=Y0P1), оно переходит к сближению со второй заданной точкой P2, при этом текущее положение траектории сближения соответствует положению линии, проходящей через точки
Постоянно определяемые значения координат точек A и B, An и Bn позволяют непрерывно вычислять: координаты точек 

Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например руля швартующегося судна, по известному закону. Таким образом, швартующееся судно движется в точку P2 по линии
Момент выхода швартующегося судна во вторую заданную точку P2 соответствует равенству координат ЦТ швартующегося судна и второй заданной точки, то есть X0G=Х0Р2, Y0G=Y0P2.
Предлагаемый способ управления судном при выполнении им швартовной операции к борту судна-партнера, лежащего в дрейфе, осуществляют следующим образом.
В пределах контуров швартующегося судна и судна-партнера, лежащего в дрейфе, в их диаметральных плоскостях выбирают по две точки, одна из которых находится в носу A (швартующееся судно), An (судно-партнер, лежащее в дрейфе), другая - в корме B (швартующееся судно), Bn (судно-партнер, лежащее в дрейфе) (фиг.2) относительно мидель-шпангоута соответствующего судна.
Координаты точек A, B, An, Bn в неподвижной координатной системе определяют непрерывно с высокой точностью (±1,0 м). Используя значения координат точек швартующегося судна A(Х0А, Y0A), B(Х0В, Y0B) и судна-партнера, лежащего в дрейфе An(X0An, Y0An), Bn(X0Bn, Y0Bn) в неподвижной координатной системе, координаты тех же точек в подвижных системах координат, связанных с швартующимся судном A(XA, YB, В(XB, YB) и судном-партнером, лежащим в дрейфе An(XAn, YAn) Bn(XBn,YBn), координаты ЦТ швартующегося судна в связанной с ним подвижной координатной системе G(XG,YG) и судна-партнера, лежащего в дрейфе в связанной с ним подвижной координатной системе Gn(X0Gn, Y0Gn), а также значения расстояния между ДП швартующихся судов h0 и расстояния между ЦТ швартующихся судов m, рассчитывают:
- координаты центра тяжести швартующегося судна G(X0G, Y0G) в неподвижной координатной системе;
- координаты центра тяжести судна-партнера, лежащего в дрейфе Gn(X0Gn, Y0Gn) в неподвижной координатной системе;
- координаты точек
- координаты проекции ЦТ судна-партнера, лежащего в дрейфе
- координаты второй заданной точки P2(X0P2, Y0P2) в неподвижной координатной системе;
- текущее значение длины тормозного пути швартующегося судна рассчитывают с использованием уравнения его движения dυ/dS=f(υ, C1, C2, C3,…),
где
υ - текущее значение скорости швартующегося судна;
S - путь;
C1 C2, C3,… - текущие значения параметров уравнения движения швартующегося судна, зависящие от текущих значений параметров, характеризующих текущее состояние загрузки судна и внешней среды (водоизмещения швартующегося судна; параметров посадки корпуса; направления и скорости ветра; параметров волнения; направления и скорости течения; глубины акватории в районе выполнения швартовной операции).
Текущее значение длины тормозного пути швартующегося судна в процессе его сближения с судном-партнером, лежащим в дрейфе, определяют интегрированием уравнения движения швартующегося судна в пределах от υ=υн до 
где 
При этом текущие значения параметров уравнения движения швартующегося судна C1, C2, C3,… в процессе выполнения швартовной операции непрерывно идентифицируют с использованием метода, описанного в работах [5], [6];
- координаты первой заданной точки P1(X0P1, Y0P1) в неподвижной координатной системе.
Зная координаты первой заданной точки и координаты ЦТ швартующегося судна, определяют текущее положение траектории сближения, проходящей через первую заданную точку P1(X0P1, Y0P1) и ЦТ швартующегося судна G(X0G, Y0G). После этого определяют поперечные смещения точек A и B от найденной указанным способом траектории сближения.
Непрерывно определяемые значения координат точек A и B, An и Bn позволяют непрерывно вычислять координаты ЦТ швартующегося судна G, а вместе с непрерывно определяемым текущим значением длины тормозного пути ST - и первой заданной точки P1, а также поперечные смещения dA и dB точек A и B швартующегося судна от текущего положения траектории сближения.
Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например руля швартующегося судна, по закону:
α=-kA×dA+kB×dB, где kA, kB - коэффициенты усиления по перечным смещениям носовой и кормовой точек швартующегося судна от текущего положения траектории сближения.
Таким образом, швартующееся судно движется по линии GP1 в направлении точки P1.
В момент выхода швартующегося судна в первую заданную точку, что соответствует равенству координат ЦТ швартующегося судна G(X0G, Y0G) и координат первой заданной точки P1(X0G, Y0P1) (X0G=X0P1; Y0G=Y0P1), оно переходит к сближению со второй заданной точкой P2, при этом текущее положение траектории сближения соответствует положению линии, проходящей через точки
Непрерывно определяемые значения координат точек A и B, An и Bn позволяют непрерывно вычислять: координаты точек 

Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например руля швартующегося судна, по известному закону. Таким образом, швартующееся судно движется в точку P2 по линии
Моменту выхода швартующегося судна во вторую заданную точку P2 соответствует равенство координат ЦТ швартующегося судна и второй заданной точки, то есть X0G=Х0Р2, Y0G=Y0P2.
В результате применения данного изобретения достигается возможность получения технического результата - соблюдение безопасности выполнения швартовной операции к борту судна-партнера, лежащего в дрейфе.
Список литературы
1. Дмитриев, В.И. Справочник капитана: справочник / В.И. Дмитриев. - Москва: Элмор, 2009. - 797 с: ил.
2. Патент №2422326 Российская Федерация, МПК8 B63H 25/00. Способ управления судном при выполнении им швартовной операции к борту судна-партнера, заявитель и патентообладатель Мурм. гос.техн. ун-т. - 2010116539/11; заявл.26.04.2010; опубл. 27.06.2011.
3. Снопков, В.И. Управление судном: учебник / В.И.Снопков. - Москва: Транспорт, 1991. - 359 с.: ил.
4. Цурбан, А.И. Швартовные операции морских судов. / А.И. Цурбан, A.M. Оганов. - М: Транспорт, 1987. - 176 с: ил.
5. Юдин Ю.И. Синтез моделей механизма предвидения для экспертных систем, обеспечивающих безопасную эксплуатацию судна: монография / Ю.И.Юдин. - Мурманск: Изд-во МГТУ, 2007. - 198 с: ил.
6. Юдин, Ю.И. Теоретические основы безопасных способов маневрирования при выполнении точечной швартовки: монография / Ю.И.Юдин, СВ.Пашенцев, Г.И.Мартюк, А.Ю.Юдин. - Мурманск: Изд-во МГТУ, 2009. - 152 с.: ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА ПАРТНЕРА, СТОЯЩЕГО НА ЯКОРЕ | 2012 |
|
RU2509031C1 |
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА ПАРТНЕРА | 2011 |
|
RU2475410C1 |
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА ПАРТНЕРА | 2008 |
|
RU2375249C1 |
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА ПАРТНЕРА | 2010 |
|
RU2422326C1 |
| Способ управления судном при выполнении им швартовной операции к борту судна партнёра | 2019 |
|
RU2714994C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ОБЪЕКТА ПРИ ВЫПОЛНЕНИИ ИМ СБЛИЖЕНИЯ С ДРУГИМ ПОДВИЖНЫМ ОБЪЕКТОМ | 2006 |
|
RU2356784C2 |
| Способ управления судном при выполнении движения по заданной траектории | 2023 |
|
RU2827122C1 |
| Способ управления судном при выполнении движения по заданной траектории | 2019 |
|
RU2713434C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ СУДНА | 2012 |
|
RU2501064C2 |
| Способ управления движущимся судном | 2015 |
|
RU2615849C1 |
Изобретение относится к водному транспорту и касается управления движением швартующегося судна при выполнении им швартовной операции к судну-партнеру, лежащему в дрейфе. Текущее положение траектории сближения определяют в виде прямой линии, проходящей через две заданные точки на плоскости. Текущее положение заданных точек на плоскости в любой заданный момент времени рассчитывают с использованием значений текущих координат носовой и кормовой точек судна-партнера, лежащего в дрейфе, заданного расстояния между бортами швартующихся судов, заданного положения швартующегося судна относительно судна партнера, лежащего в дрейфе в конечной стадии швартовки, и текущего значения длины тормозного пути швартующегося судна, необходимого для перехода его от исходной скорости движения к скорости, равной продольной составляющей линейной скорости швартующего судна. Сближение осуществляют в два этапа. На каждом этапе сближения используют свои заданные точки на плоскости. На первом этапе сближения швартующееся судно выходит в первую условную точку. На втором этапе во вторую условную точку. Технический результат реализации изобретения заключается в совершенствовании управления швартующимся судном при выполнении им швартовной операции к судну-партнеру, лежащему в дрейфе, и тем самым обеспечении безопасности швартовной операции. 4 ил.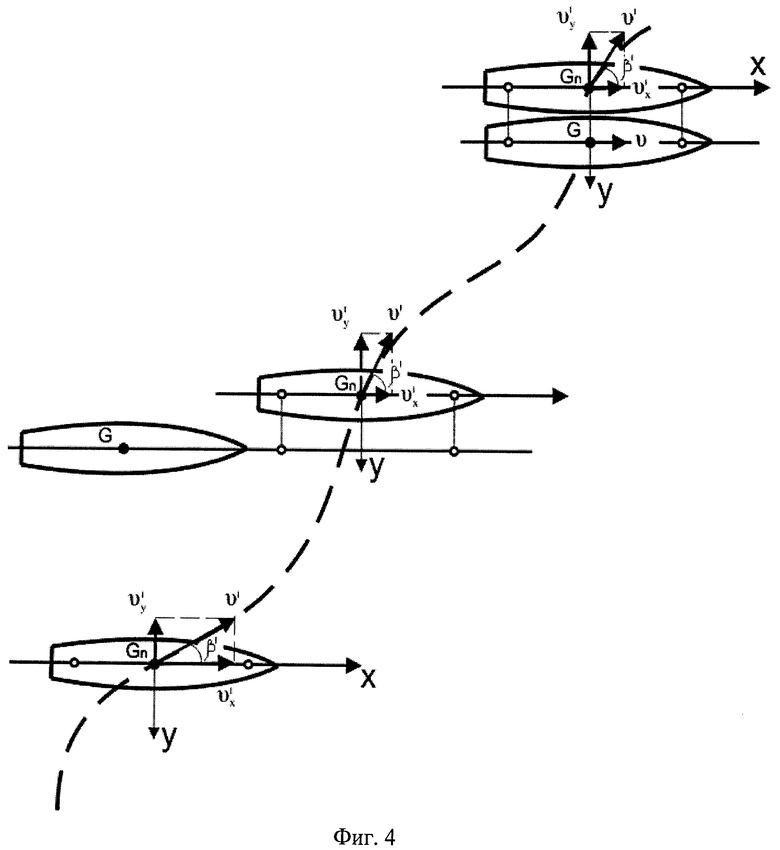
Способ управления судном при выполнении им швартовной операции к борту судна-партнера, лежащего в дрейфе, когда в пределах контуров швартующегося судна и судна-партнера, в их диаметральных плоскостях выбирают по две точки, одна из которых находится в носу A (швартующееся судно), An (судно-партнер), другая - в корме B (швартующееся судно), Bn (судно-партнер) относительно мидель-шпангоута соответствующего судна, координаты точек A, B, An, Bn в неподвижной координатной системе определяют непрерывно с высокой точностью (±1,0 м), используя значения координат точек швартующегося судна A (X0A, Y0A), B (X0B, Y0B) и судна-партнера, лежащего в дрейфе An (X0An, Y0An), Bn (X0Bn, Y0Bn) в неподвижной координатной системе, координаты тех же точек в подвижных системах координат, связанных с швартующимся судном A (XA, YA), B (XB, YB) и судном-партнером, лежащим в дрейфе An (XAn, YAn), Bn (XBn, YBn), координаты ЦТ швартующегося судна в связанной с ним подвижной координатной системе G (XG,YG) и судна-партнера, лежащего в дрейфе в связанной с ним подвижной координатной системе Gn (X0Gn, Y0Gn), а также значения расстояния между ДП швартующихся судов h0 и расстояния между ЦТ швартующихся судов m, рассчитывают:
- координаты центра тяжести швартующегося судна G (X0G, Y0G) в неподвижной координатной системе;
- координаты центра тяжести судна-партнера, лежащего в дрейфе Gn (X0Gn, Y0Gn) в неподвижной координатной системе;
- координаты точек 
- координаты проекции ЦТ судна-партнера, лежащего в дрейфе 
- координаты второй заданной точки P2 (X0P2, Y0P2) в неподвижной координатной системе;
- текущее значение длины тормозного пути швартующегося судна рассчитывается с использованием уравнения его движения
dυ/dS=f(υ, C1, C2, C3,…),
где υ - текущее значение скорости швартующегося судна;
S - путь;
C1, C2, C3,… - текущие значение параметров уравнения движения швартующегося судна, зависящие от текущих значений параметров, характеризующих текущее состояние загрузки судна и внешней среды (водоизмещения швартующегося судна; параметров посадки корпуса; направления и скорости ветра; параметров волнения; направления и скорости течения; глубины акватории в районе выполнения швартовной операции), отличающийся тем, что текущее значение длины тормозного пути швартующегося судна в процессе его сближения с судном-партнером определяют интегрированием уравнения движения швартующегося судна в пределах от υ=υн до
где
- координаты первой заданной точки P1 (X0P1, Y0P1) в неподвижной координатной системе, зная координаты первой заданной точки и координаты ЦТ швартующегося судна, определяют текущее положение траектории сближения, проходящей через первую заданную точку P1 (X0P1, Y0P1) и ЦТ швартующегося судна G (X0G, Y0G), после этого определяют поперечные смещения точек A и B от найденной траектории сближения, непрерывно определяемые значения координат точек A и B, An и Bn позволяют непрерывно вычислять координаты ЦТ швартующегося судна G, а вместе с непрерывно определяемым текущим значением длины тормозного пути ST - и первой заданной точки P1, а также поперечные смещения dA и dB точек A и B швартующегося судна от текущего положения траектории сближения, возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, швартующееся судно движется по линии GP1 в направлении точки P1 в момент выхода швартующегося судна в первую заданную точку, что соответствует равенству координат ЦТ швартующегося судна G (X0G, Y0G) и координат первой заданной точки P1 (X0G, Y0P1) (X0G=X0P1; Y0G=Y0P1), оно переходит к сближению со второй заданной точкой Р2, при этом текущее положение траектории сближения соответствует положению линии, проходящей через точки 


| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА ПАРТНЕРА | 2010 |
|
RU2422326C1 |
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА ПАРТНЕРА | 2008 |
|
RU2375249C1 |
| US 4747359 A, 31.05.1988. | |||

