Изобретение относится к управлению движущимся судном и может быть использовано при позиционировании его в заданной точке плоскости.
Известен способ управления движущимся объектом (Пат. РФ №2263606, опубл. 10.11.2005), например судном, по величине поперечных смещений двух разнесенных по длине судна точек, условно называемых носовой F и кормовой А. В пределах контура судна в его диаметральной плоскости выбирают две точки, одна из которых расположена к носу судна (точка F на фиг.1-4), а другая к корме судна (точка А на фиг.1-4) относительно плоскости мидель-шпангоута. Расстояние между точками F и A выбирают в зависимости от технической возможности размещения в этих точках приемных антенн спутниковой навигационной системы (СНС). Чем больше это расстояние, тем качественнее работа системы управления движением судна для удержания его на заданной линии.
Координаты этих точек определяют непрерывно с высокой точностью (±1,0 м), это стало возможным с введением в СНС береговых станций, вычисляющих и передающих на судно дифференциальные поправки.
Значения координат позволяют непрерывно вычислять поперечные смещения точки F (dF) и точки A (dA) от заданной линии. Причем поперечное смещение точки от заданной линии считается положительным, если она смещается вправо, и отрицательным, если она смещается влево (фиг.1-4).
Возникающие поперечные смещения вырабатывают сигнал для работы отдельных элементов или всего движительно-рулевого комплекса судна по закону:
σ=-kF×dF+kA×dA,
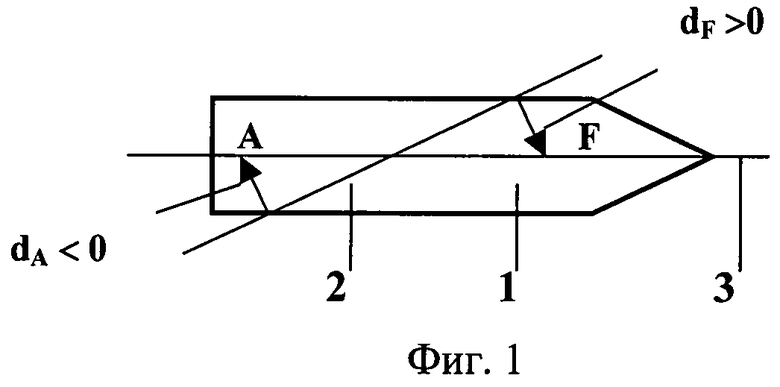
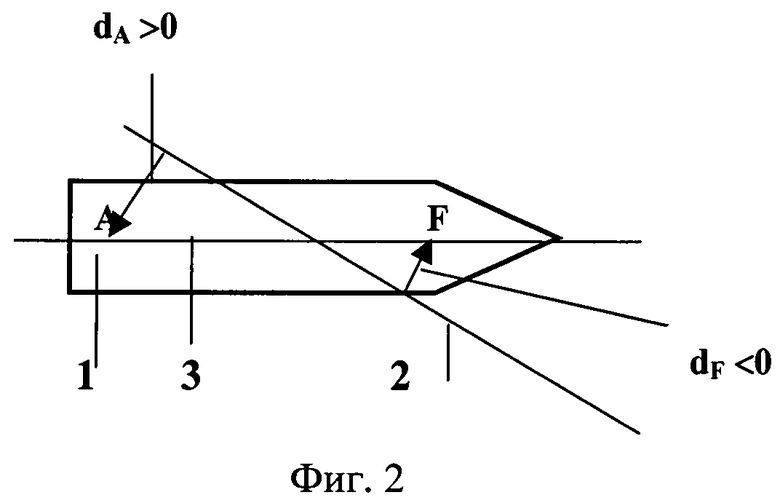
где kF, kA - коэффициенты усиления по поперечным смещениям носовой и кормовой точек судна от заданной линии. Это положительные величины, причем kF больше kA. Сигнал σ считается положительным при вращении судна по часовой стрелке и отрицательным при вращении судна против часовой стрелки. На фиг.1-4 изображены основные варианты возможных отклонений судна 1 от заданной линии 2. Например, на фиг.1, 2 ДП судна 3 пересекает заданную линию 2 под некоторым углом, величина которого характеризуется значениями поперечных смещений точки F(dF) и точки A(dA), причем dF больше 0, dA меньше 0 (фиг.1) и dF меньше 0, dA больше 0 (фиг.2). В первом случае (фиг.1) согласно закону элементы движительно-рулевого комплекса будут обеспечивать вращение судна против часовой стрелки, что приведет к уменьшению dF и dA и в конечном итоге к выходу судна на заданную линию; во втором случае (фиг.2) сигнал управления будет иметь положительное значение и движительно-рулевой комплекс обеспечит вращение судна по часовой стрелке, что приведет к уменьшению dF, dA и к выходу судна на заданную линию.
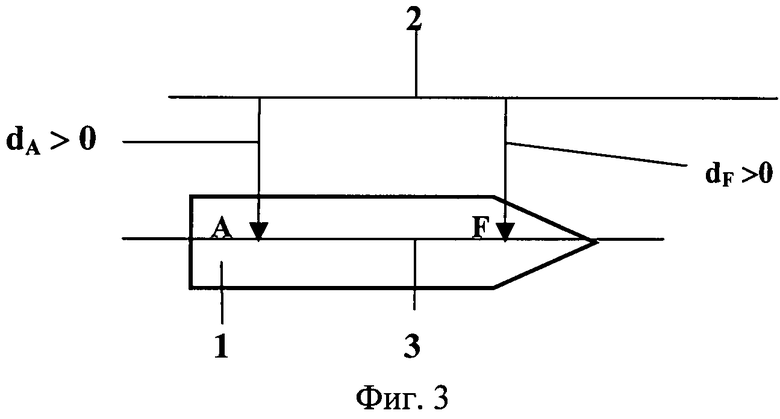
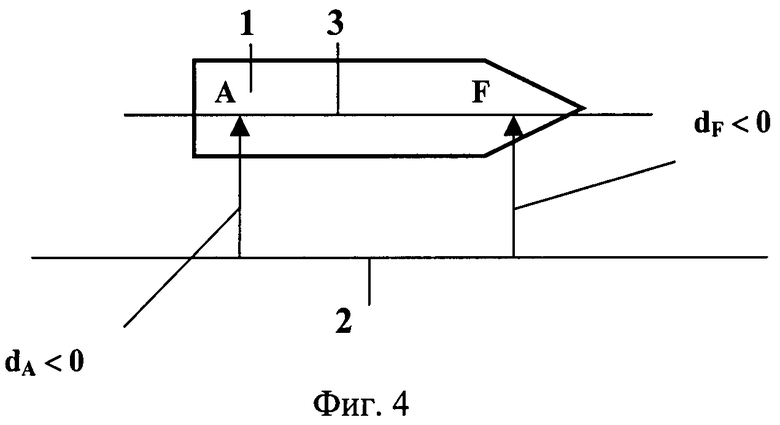
На фиг.3, 4 ДП 3 судна 1 не пересекает заданную линию 2, а поперечные смещения точек F, А имеют одинаковые знаки, положительные (фиг.3) и отрицательные (фиг.4). Знак σ и соответствующее ему направление вращения судна, обеспечиваемое его движительно-рулевым комплексом, зависят от соотношения значений коэффициентов kF и kA (kF больше kA, если знаки поперечных смещений точек F и A одинаковы, фиг.3, 4; kF и kA будут равны по величине, если знаки поперечных смещений точек F и А противоположны, фиг.1, 2). Соотношение значений коэффициентов kF и kA выбирают из различных соображений. Например, если считать, что отклонение направления движения судна от заданного будет находиться в пределах ±90°, то указанное соотношение будет определяться выражением:
где l - расстояние между точками F и А.
Однако для позиционирования управляемого судна в заданной точке и в заданном направлении рассматриваемый в качестве прототипа способ управления движущимся объектом (Пат. РФ №2263606) не обеспечивает выполнение условия вывода судна в позицию, когда текущее положение условной точки C (фиг.5) в горизонтальной плоскости будет совпадать с положением заданной точки D.
Технический результат, на достижение которого направлено заявляемое изобретение, состоит в соблюдении условия удержания позиционирующего судна в заданной точке, расположенной на заданной линии.
Для достижения указанного технического результата в способе управления движущимся судном, когда в пределах контура судна в его диаметральной плоскости выбирают две точки, одна из которых расположена к носу судна (точка F на фиг.1-4), а другая к корме судна (точка A на фиг.1-4) относительно плоскости мидель-шпангоута. Расстояние между точками F и A выбирают в зависимости от технической возможности размещения в этих точках приемных антенн спутниковой навигационной системы (СНС). Чем больше это расстояние, тем качественнее работа системы управления положением судна относительно заданной линии.
Координаты этих точек определяют непрерывно с высокой точностью (±1,0 м), это стало возможным с введением в СНС береговых станций, вычисляющих и передающих на судно дифференциальные поправки.
Значения координат позволяют непрерывно вычислять поперечные смещения точки F (dF) и точки A (dA) от заданной линии. Причем, поперечное смещение точки от заданной линии считается положительным, если она смещается вправо, и отрицательным, если она смещается влево (фиг.1-4).
Возникающие поперечные смещения вырабатывают сигнал для работы отдельных элементов или всего движительно-рулевого комплекса судна по закону:
σ=-kF×dF+kA×dA,
где kF, kA - коэффициенты усиления по поперечным смещениям носовой и кормовой точек судна от заданной линии. Это положительные величины, причем kF больше kA. Сигнал σ считается положительным при вращении судна по часовой стрелке и отрицательным при вращении судна против часовой стрелки. На фиг.1-4 изображены основные варианты возможных отклонений судна 1 от заданной линии 2. Например, на фиг.1, 2 ДП 3 судна 1 пересекает заданную линию 2 под некоторым углом, величина которого характеризуется значениями поперечных смещений точки F(dF) и точки A(dA), причем dF больше 0, dA меньше 0 на фиг.1 и dF меньше 0, dA больше 0 (фиг.2). В первом случае (фиг.1) согласно закону элементы движительно-рулевого комплекса будут обеспечивать вращение судна против часовой стрелки, что приведет к уменьшению dF и dA и в конечном итоге к выходу судна на заданную линию; во втором случае (фиг.2) сигнал управления будет иметь положительное значение и движительно-рулевой комплекс обеспечит вращение судна по часовой стрелке, что приведет к уменьшению dF, dA и к выходу судна на заданную линию.
На фиг.3, 4 ДП 3 судна 1 не пересекает заданную линию 2, а поперечные смещения точек F, А имеют одинаковые знаки, положительные на фиг.3 и отрицательные на фиг.4. Знак σ и соответствующее ему направление вращения судна, обеспечиваемое его движительно-рулевым комплексом, зависят от соотношения значений коэффициентов kF и kA (kF больше kA, если знаки поперечных смещений точек F и A одинаковы, фиг.3, 4; kF и kA будут равны по величине, если знаки поперечных смещений точек F и A противоположны, фиг.1, 2). Соотношение значений коэффициентов kF и kA выбирают из различных соображений. Например, если считать, что отклонение направления движения судна от заданного будет находиться в пределах ±90°, то указанное соотношение будет определяться выражением:
где l - расстояние между точками F и А.
Однако для позиционирования управляемого судна в заданной точке в заданном направлении рассматриваемый в качестве прототипа способ управления не обеспечивает выполнение условия вывода судна в позицию, когда положение условной точки C (фиг.5) на плоскости будет совпадать с положением заданной точки D.
Отличительным признаком предлагаемого способа от указанного выше известного, наиболее близкого к нему, является следующий:
дополнительно для обеспечения вывода позиционирующего судна в заданную точку D, условием которого является совпадение положений точек C и D на плоскости, формируют дополнительный сигнал управления по закону
δS=kSdS,
где kS - коэффициент усиления по продольному смещению условной точки D (фиг.5) от линии, перпендикулярной заданной линии (условно линия L1) и проходящей через заданную точку C (условно линия L2), это положительная величина. На фиг.5 показаны два возможных варианта отклонения точки C от линии L2, здесь же указаны знаки соответствующих отклонений dS. Текущее положение точки C, расположенной в пределах корпуса судна в его ДП, определяют исходя из значений текущих координат носовой F и кормовой A точек.
Предлагаемый способ управления движущимся судном при позиционировании его в заданном направлении в заданной точке горизонтальной плоскости осуществляют следующим способом:
в пределах контура судна в его диаметральной плоскости выбираются две точки, одна из которых расположена к носу судна (точка F на фиг.1-4), а другая к корме судна (точка A на фиг.1-4) относительно плоскости мидель-шпангоута. Расстояние между точками F и A выбирают в зависимости от технической возможности размещения в этих точках приемных антенн спутниковой навигационной системы (СНС). Чем больше это расстояние, тем качественнее работа системы управления движением судна относительно заданной линии. При этом направление заданной линии L1, например, совпадает с направлением ДП судна при его положении на поверхности воды, соответствующем минимальному внешнему силовому воздействию факторов окружающей среды (ветер, волнение, течение).
Координаты этих точек определяют непрерывно с высокой точностью (±1,0 м), это стало возможным с введением в СНС береговых станций, вычисляющих и передающих на судно дифференциальные поправки.
Значения координат позволяют непрерывно вычислять поперечные смещения точки F(dF) и точки A(dA) от заданной линии. Причем поперечное смещение точки от заданной линии считается положительным, если она смещается вправо, и отрицательным, если она смещается влево (фиг.1-4).
Возникающие поперечные смещения вырабатывают сигнал для работы отдельных элементов или всего движительно-рулевого комплекса судна по закону:
σ=-kF×dF+kA×dA,
где kF, kA - коэффициенты усиления по поперечным смещениям носовой и кормовой точек судна от заданной линии. Это положительные величины, причем kF больше kA. Сигнал σ считается положительным при вращении судна по часовой стрелке и отрицательным при вращении судна против часовой стрелки. На фиг.1-4 изображены основные варианты возможных отклонений судна 1 от заданной линии 2. Например, на фиг.1, 2 ДП 3 судна 1 пересекает заданную линию 2 под некоторым углом, величина которого характеризуется значениями поперечных смещений точки F(dF) и точки A(dA), причем dF больше 0, dA меньше 0 (фиг.1) и dF меньше 0, dA больше 0 (фиг.2). В первом случае (фиг.1) согласно закону элементы движительно-рулевого комплекса будут обеспечивать вращение судна против часовой стрелки, что приведет к уменьшению dF и dA и в конечном итоге к выходу судна на заданную линию; во втором случае (фиг.2) сигнал управления будет иметь положительное значение и движительно-рулевой комплекс обеспечит вращение судна по часовой стрелке, что приведет к уменьшению dF, dA и к выходу судна на заданную линию.
На фиг.3, 4 ДП 3 судна 1 не пересекает заданную линию 2, а поперечные смещения точек F, А имеют одинаковые знаки, положительные на фиг.3 и отрицательные на фиг.4. Знак σ и соответствующее ему направление вращения судна, обеспечиваемое его движительно-рулевым комплексом, зависят от соотношения значений коэффициентов kF и kA (kF больше kA, если знаки поперечных смещений точек F и A одинаковы, фиг.3, 4; kF и kA будут равны по величине, если знаки поперечных смещений точек F и А противоположны, фиг.1, 2). Соотношение значений коэффициентов kF и kA выбирают из различных соображений. Например, если считать, что отклонение направления движения судна от заданного будет находиться в пределах ±90°, то указанное соотношение будет определяться выражением:
где l - расстояние между точками F и А.
Однако для позиционирования управляемого судна в заданной точке рассматриваемый в качестве прототипа способ управления не обеспечивает выполнение условия вывода судна в позицию, когда положение условной точки C (фиг.5) на плоскости будет совпадать с положением заданной точки D.
Для обеспечения вывода позиционирующего судна в заданную точку D, условием которого является совпадение положений точек C и D на плоскости, формируют дополнительный сигнал управления по закону
δS=kSdS,
где kS - коэффициент усиления по продольному смещению заданной точки D (фиг.5) от линии, перпендикулярной заданной линии (условно линия L1) и проходящей через условную точку C (условно линия L2), это положительная величина. На фиг.5 показаны два возможных варианта отклонения точки C от линии L2, здесь же указаны знаки соответствующих отклонений dS. Текущее положение условной точки C, расположенной в пределах корпуса судна в его ДП, определяют исходя из значений текущих координат носовой F и кормовой A точек.
В результате применения данного изобретения достигается возможность получения технического результата - обеспечение удержания позиционирующего объекта, например судна, на заданной линии и в заданной точке, расположенной на заданной линии.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления движением буксирной системы | 2015 |
|
RU2615846C1 |
| Способ управления судном при выполнении им швартовной операции к борту судна партнёра | 2019 |
|
RU2714994C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ СУДНОМ | 2014 |
|
RU2553610C1 |
| Способ управления судном при выполнении движения по заданной траектории | 2023 |
|
RU2827122C1 |
| Способ управления движущимся судном | 2015 |
|
RU2615849C1 |
| Способ управления движущимся судном | 2015 |
|
RU2615848C1 |
| Способ управления судном при выполнении движения по заданной траектории | 2019 |
|
RU2713434C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2012 |
|
RU2509679C1 |
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА ПАРТНЕРА, СТОЯЩЕГО НА ЯКОРЕ | 2012 |
|
RU2509031C1 |
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА ПАРТНЕРА | 2011 |
|
RU2475410C1 |
Изобретение относится к управлению движущимся судном при его позиционировании в заданной точке плоскости в заданном направлении. Используют поперечные смещения двух разнесенных по длине объекта точек и продольные отклонения условной точки. Условная точка расположена в диаметральной плоскости (ДП) судна. Заданное направление судна совпадает с направлением ДП судна при его положении на поверхности воды, соответствующем минимальному внешнему силовому воздействию факторов окружающей среды (ветер, волнение, течение). Текущее положение разнесенных по длине судна точек на плоскости в любой заданный момент времени определяют с использованием спутниковой навигационной системы. Текущее положение условной точки рассчитывают с использованием значений текущих координат носовой и кормовой точек судна. Используют заданную точку. Заданная точка расположена на заданной линии. Формируют дополнительный сигнал управления по закону δS=kSdS, где kS - коэффициент усиления по продольному смещению заданной точки от линии, перпендикулярной заданной линии и проходящей через условную точку. Реализация изобретения заключается в обеспечении удержания позиционирующего судна на заданной линии и в заданной точке, расположенной на заданной линии. 5 ил.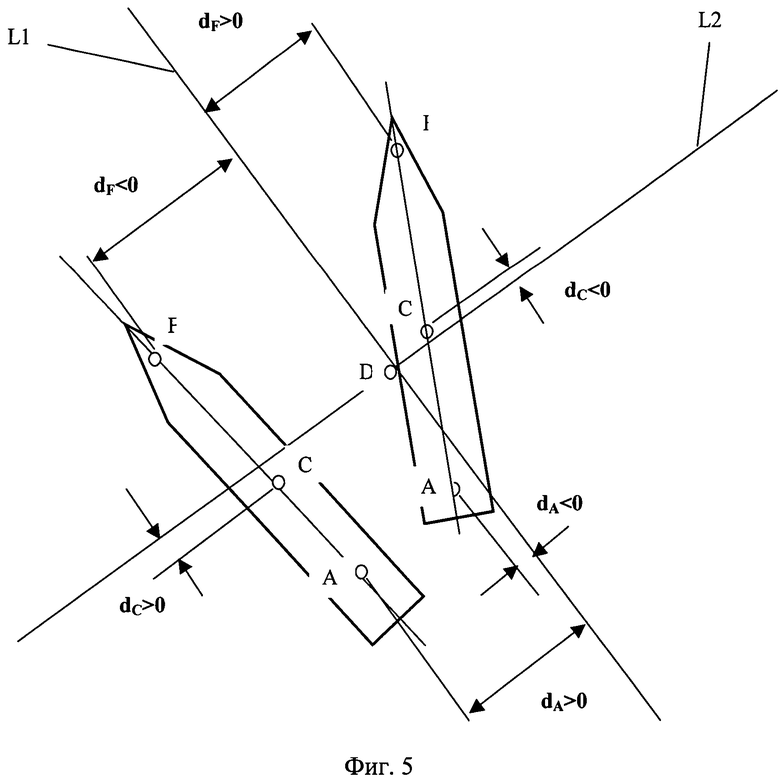
Способ управления движущимся судном, характеризующийся тем, что в пределах контура судна в его диаметральной плоскости (ДП) выбирают две точки, одна из которых расположена к носу судна - точка F, а другая к корме судна - точка А относительно плоскости мидель-шпангоута, заданную линию L1, направление которой совпадает с направлением ДП судна при его положении на поверхности воды, соответствующем минимальному внешнему силовому воздействию факторов окружающей среды, непрерывно определяют с высокой точностью (±1,0 м) координаты этих точек и вычисляют поперечные смещения точки F (dF) и точки A (dA) от заданной линии L1, возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа судна по закону:
σ=- kF×dF+kA×dA,
где kF, kA - коэффициенты усиления по поперечным смещениям носовой и кормовой точек судна от заданной линии L1, дополнительно используют условную точку С, расположенную в пределах корпуса судна в его ДП, текущее положение которой определяют исходя из значений текущих координат носовой F и кормовой А точек, и заданную точку D, расположенную на заданной линии L1, при этом положения точек С и D совпадают на плоскости, формируют дополнительный сигнал управления по закону
δS=kSdS,
где kS - коэффициент усиления по продольному смещению заданной точки D от линии, перпендикулярной заданной линии L1 и проходящей через условную точку С, условно линия L2.
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ | 1991 |
|
RU2009961C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ОБЪЕКТА ПРИ ВЫПОЛНЕНИИ ИМ СБЛИЖЕНИЯ С ДРУГИМ ПОДВИЖНЫМ ОБЪЕКТОМ | 2006 |
|
RU2356784C2 |
| US 8015935 B2, 13.09.2011. | |||

