Уровень техники
Настоящее изобретение в целом относится к операциям бурения скважин, а в частности, к оптимизированному вращению бурильной колонны во время операции наклонно-направленного бурения в скользящем режиме.
Обычно, бурильную колонну могут вращать с поверхности для вращения бурового долота во время бурения. В частных применениях наклонно-направленного бурения для вращения бурового долота используют забойный гидравлический двигатель с изогнутым корпусом, а любое вращение, воздействующее на бурильную колонну с поверхности, временно останавливают. При использовании гидравлического двигателя для вращения бурового долота и во время, когда скорость проходки бурового долота относительно невысокая, часть бурильной колонны может быть неподвижной и обеспечивать образование статического трения. Статическое трение может быть нарушено посредством сжатия бурильной колонны до превышения накапливаемой энергией силы статического трения. При освобождении накапливаемой энергии, обеспечивается ее передача буровому долоту, что может повреждать буровое долото. В частных известных операциях бурильную колонну могут частично вращать для предотвращения нахождения бурильной колонны в неподвижном состоянии. Однако известные механизмы для управления частичным вращением бурильной колонны не являются энергоэффективными.
Краткое описание чертежей
Некоторые конкретные приведенные в качестве примера варианты реализации настоящего изобретения будут понятны частично со ссылкой на следующее описание и сопроводительные чертежи.
На фиг. 1 представлена диаграмма, иллюстрирующая приведенную в качестве примера систему наклонно-направленного бурения в соответствии с аспектами настоящего изобретения.
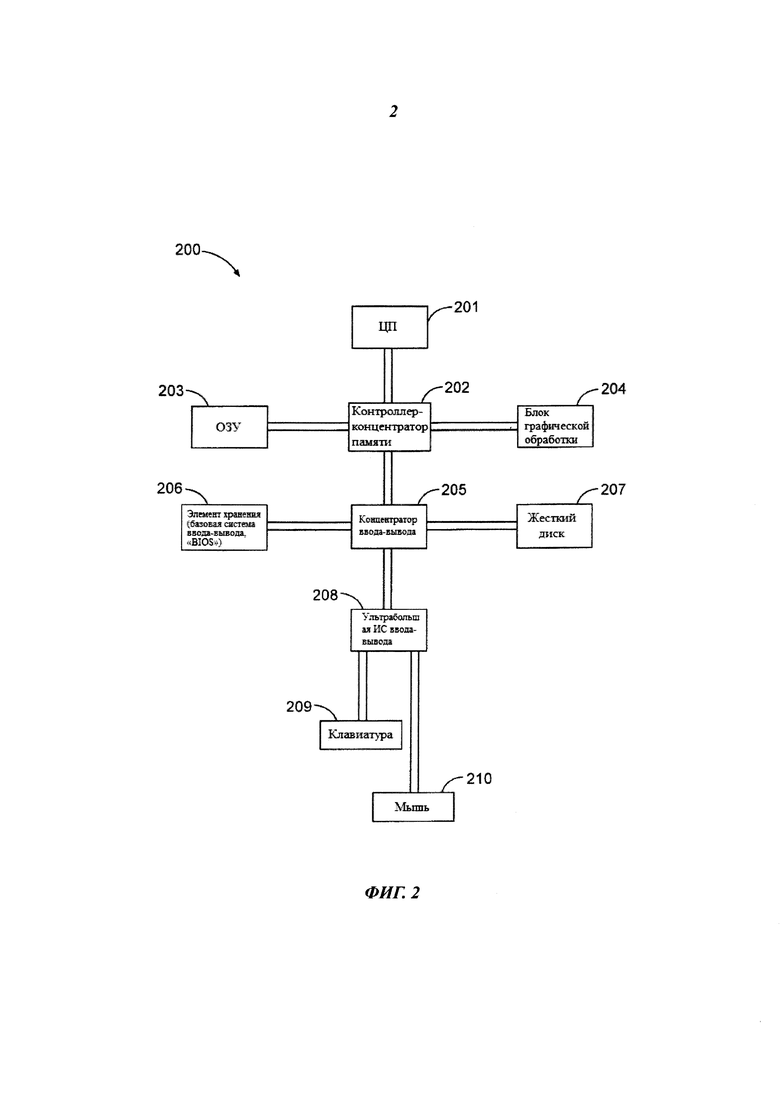
На фиг. 2 представлена диаграмма, иллюстрирующая приведенную в качестве примера систему обработки информации в соответствии с аспектами настоящего изобретения.
На фиг. 3А и 3В представлены диаграммы, иллюстрирующие приведенную в качестве примера модель системы наклонно-направленного бурения в соответствии с аспектами настоящего изобретения.
На фиг. 4А и 4В представлены диаграммы, иллюстрирующие оптимизированный входной крутящий момент и управляющий сигнал в соответствии с аспектами настоящего изобретения.
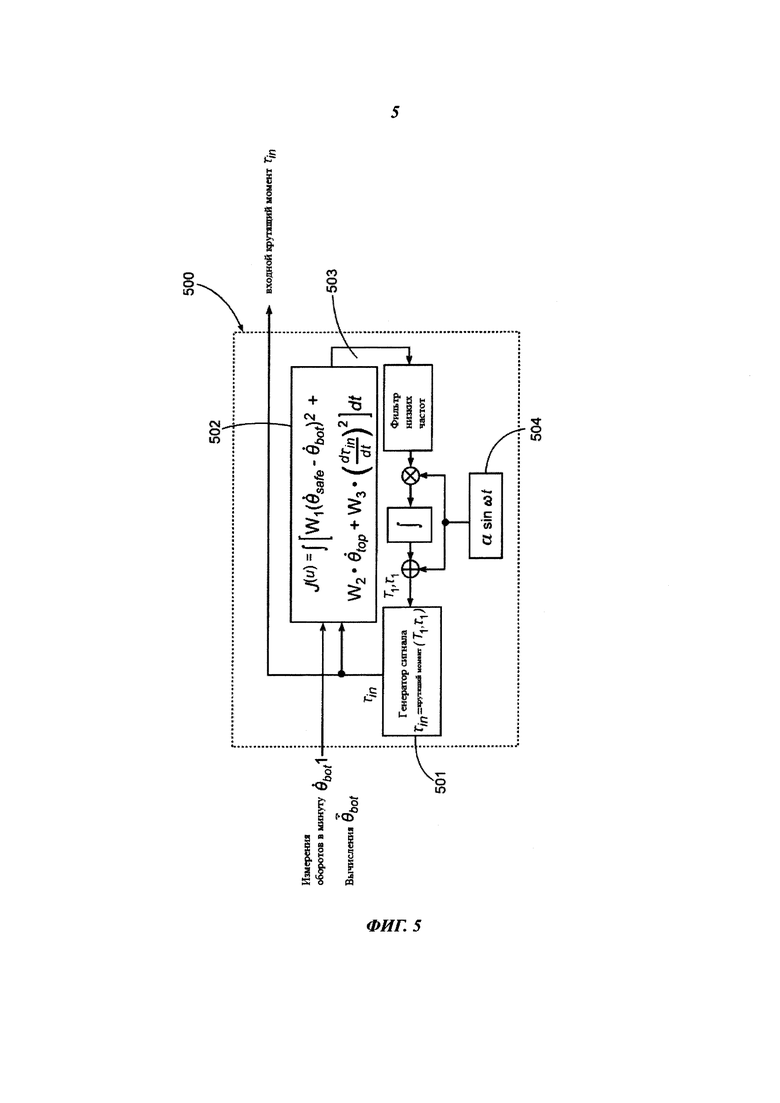
На фиг. 5 представлена диаграмма, иллюстрирующая приведенную в качестве примера систему управления в соответствии с аспектами настоящего изобретения.
На фиг. 6 представлена диаграмма, иллюстрирующая приведенную в качестве примера систему управления в соответствии с аспектами настоящего изобретения.
Несмотря на то что варианты реализации настоящего изобретения были изображены и описаны, и изложены посредством ссылки на приведенные в качестве примера варианты реализации изобретения, эти ссылки не ограничивают изобретение, и такое ограничение не подразумевается. Раскрываемый объект изобретения допускает значительную модификацию, изменение и эквиваленты по форме и функции, которые придут на ум специалистам в данной области техники и имеют преимущества данного изобретения. Изображенные и описанные варианты реализации настоящего изобретения являются примерами, и не ограничивают объем изобретения.
Осуществление изобретения
Настоящее изобретение в целом относится к операциям бурения скважин, а, в частности, к оптимизированному вращению бурильной колонны во время операции наклонно-направленного бурения в скользящем режиме.
Иллюстративные варианты реализации настоящего изобретения более подробно описаны в настоящем описании. Для ясности, в настоящем описании могут быть описаны не все особенности фактической реализации. Конечно, следует понимать, что в разработке любого такого фактического варианта осуществления, для достижения конкретных целей реализации должны быть выполнены многочисленные реализации конкретных решений, которые будут отличаться от одной реализации к другой. Кроме того, следует иметь в виду, что такая разработка может быть сложной и трудоемкой, но, тем не менее, благодаря этому описанию, быть рутинным делом для среднего специалиста в данной области техники.
Для способствования лучшему пониманию настоящего изобретения приведены следующие примеры частных вариантов реализации. Следующие примеры не следует воспринимать в качестве ограничения или определения объема изобретения. Варианты реализации настоящего изобретения могут быть применимы к горизонтальным, вертикальным, отклоненным, многоствольным, с соединением через U-образные трубы или другим нелинейным стволам скважины в любом типе подземной формации. Варианты реализации могут быть применимы к нагнетательным скважинам и эксплуатационным скважинам, включая эксплуатационные скважины природных ресурсов, такие как сероводородные, углеводородные или геотермальные скважины; а также строительству стволов скважины для пересекающего реку туннелирования и других таких туннелирований стволов скважин в целях приповерхностного строительства, или стволовых U-образных трубопроводов, используемых для транспортировки таких текучих сред, как углеводородов. Варианты реализации, описанные далее относительно одного применения, не являются ограничивающими.
Современные операции бурения и добычи нефти требуют информации относительно параметров и условий в скважине. Существует несколько способов для сбора скважинной информации, включая каротаж во время бурения (logging while drilling, «LWD») и измерения во время бурения (measurement-while drilling, «MWD»). При каротаже во время бурения, данные обычно собирают во время процесса бурения, таким образом исключая необходимость удаления буровой компоновки для введения кабельного каротажного прибора. Следовательно, каротаж во время бурения обеспечивает возможность оператору, осуществляющему бурение, вносить точные модификации или исправления в режиме реального времени для оптимизации производительности, при этом сводя к минимуму время простоя. Термин «измерения во время бурения (measurement-while drilling, «MWD»)» обозначает измерение условий в скважине, относящихся к перемещению и расположению буровой компоновки во время продолжения бурения. Каротаж во время бурения более сосредоточен на измерении параметров пласта. Хотя существуют различия между измерениями во время бурения и каротажем во время бурения, термины измерения во время бурения и каротаж во время бурения часто используют взаимозаменяемо. В настоящем описании термин «каротаж во время бурения» будет использован с пониманием того, что этот термин включает сбор параметров пласта и сбор информации, относящейся к перемещению и расположению буровой компоновки.
В контексте настоящего описания предполагается, что термин «соединены» или «соединен» обозначает непрямое либо прямое соединение. Таким образом, если первое устройство соединено со вторым устройством, такое соединение может быть осуществлено через прямое соединение или через непрямое механическое или электрическое соединение посредством других устройств и соединений. Аналогично, термин «соединен с возможностью обмена данными» обозначает непрямое либо прямое соединение. Такое соединение может быть проводным или беспроводным соединением, таким как, например, Ethernet или локальная сеть LAN. Данные проводные или беспроводные соединения хорошо знакомы специалистам в данной области техники и нет необходимости в более детальном рассмотрении в данной заявке. Таким образом, если первое устройство соединено со вторым устройством с возможностью обмена информацией, такое соединение может быть осуществлено через прямое соединение или через непрямое соединение с возможностью обмена данными посредством других устройств и соединений. Под использованной в настоящем описанием формой единственного числа следует понимать один или большее количество элементов.
На фиг. 1 представлена диаграмма, иллюстрирующая приведенную в качестве примера систему 100 наклонно-направленного бурения в соответствии с аспектами настоящего изобретения. В контексте настоящего описания система наклонно-направленного бурения может являться подземной бурильной системой, в которой по меньшей мере одно из наклона или азимутальной ориентации бурового долота преднамеренно отклонено для контакта с целью, прохождения или пересечения ее. Например, системы наклонно-направленного бурения могут быть использованы для прохождения подземного резервуара для добычи углеводородов. Системы наклонно-направленного бурения могут также быть использованы для следования по существующему стволу внутри формации или для пересечения существующей скважины, в которой произошел выброс.
В изображенном варианте реализации система 100 наклонно-направленного бурения содержит установку 101, расположенную на поверхности 102 над формацией 103. Хотя на фиг. 1 установка 101 изображена на суше, установка 101 может быть использована в море, причем поверхность 102 содержит бурильную платформу. Установка 101 может быть присоединена к буровой компоновке 104, осуществляющей бурение ствола 105 внутри формации 103. Буровая компоновка 104 может содержать бурильную колонну 106, забойное оборудование 107 (bottom hole assembly, «ВНА») и кривой переходник 108. Бурильная колонна 106 может содержать множество труб, присоединенных друг к другу через резьбовые соединения. Забойное оборудование 107 может содержать одну или большее количество систем 109 каротажа во время бурения или измерения во время бурения, систему 110 телеметрии, гидравлический двигатель 111 и буровое долото 112. Кривой переходник 108 может содержать соединитель с нерегулируемым или регулируемым углом, управляющий по меньшей мере одним из наклона и азимутального направления буровой компоновки 104 в целом, и бурового долота 112 в частности. В частных вариантах реализации кривой переходник 108 может быть встроен в забойное оборудование 107 или расположен на другом участке вдоль бурильной колонны 106. В частных вариантах реализации система 100 наклонно-направленного бурения может содержать гидравлический двигатель, содержащий изогнутый корпус вместо отдельного кривого переходника 108, изображенный на фиг 1.
Система 109 каротажа во время бурения/измерения во время бурения может содержать приспособления для скважинных измерений или каротажа, включая магнетометры, акселерометры, антенны и т.д. Система 110 телеметрии может обеспечивать путь обмена данными между системой 109 каротажа во время бурения/измерения во время бурения и другой скважинной системой, и расположенным на поверхности блоком 113 управления. Например, система 110 телеметрии может содержать буровой насос, выполненный с возможностью обмена данными с расположенным на поверхности блоком 113 управления через последовательность импульсов давления в буровом растворе в стволе 105.
В изображенном варианте реализации расположенный на поверхности блок 113 управления может содержать систему обработки информации. Использованные в настоящем описании системы обработки информации могут содержать любые приспособления или сочетание инструментов, выполненных с возможностью вычисления, классификации, обработки, передачи, приема, извлечения, создания, переключения, хранения, отображения, проявления, обнаружения, записи, воспроизведения, управления или использования любой формы информации, сведений или данных для бизнеса, науки, управления или других целей. Например, система обработки информации может являться персональным компьютером, сетевым устройством хранения данных или любым подходящим устройством, и может иметь разный размер, форму, производительность, функциональность и цену. Система обработки информации может содержать оперативное запоминающее устройство (ОЗУ), один или большее количество вычислительных ресурсов, таких как центральный процессор (ЦП), или аппаратную или программную схему управления, постоянное запоминающее устройство (ПЗУ) и/или энергонезависимое запоминающее устройство других типов. Дополнительные компоненты системы обработки информации могут содержать один или большее количество дисковых приводов, один или большее количество сетевых портов для обмена данными с внешними устройствами, а также различные устройства ввода-вывода (I/O), такие как клавиатура, мышь и видео дисплей. Система обработки информации может также содержать один или большее количество концентраторов, выполненных с возможностью обеспечения обмена данными между различными аппаратными компонентами.
Во время операций бурения буровой раствор может быть нагнетен из резервуара 114 в ствол 120 буровой компоновки 104 через трубу 115. После внедрения в ствол 120 буровой компоновки 104 может быть обеспечен отток бурового раствора от поверхности, как обозначено указателем 117. Выведение бурового раствора из буровой компоновки 104 может быть осуществлено через промывочные каналы внутри бурового долота 112. Во время выведения бурового раствора из бурового долота 112 он может смазывать и охлаждать режущую поверхность бурового долота 112 и выводить вырубленную породу из бурового долота 112 к поверхности 102. Буровой раствор 115 может протекать к поверхности 102, как отображено указателем 118, в кольцевом пространстве 119 между буровой компоновкой 104 и стенкой ствола 105.
Гидравлический двигатель 111 может содержать по меньшей мере один элемент внутри потока бурового раствора 117, передающий энергию от потока бурового раствора 117 во вращательное движение. Например, гидравлический двигатель 111 может содержать турбину, выполненную с возможностью вращения в ответ на поток текучей среды. Турбина может приводить в движение выходной вал, который может быть присоединен непосредственно или опосредованно через зубчатые передачи и другие приводные элементы, к буровому долоту 112. Соответственно, при нагнетании бурового раствора в буровую компоновку 104 буровое долото 112 выполнено с возможностью вращения и бурения внутрь формации 103. Следует отметить, что посредством вращения бурового долота 112 гидравлическим двигателем 111, а не бурильной колонной 106 азимутальная ориентация кривого переходника 108 и бурового долота 112 может оставаться по существу неизменным во время бурения ствола 105. Однако при низкой скорости проходки буровой компоновки 104, часть бурильной колонны 106 может находиться в неподвижном состоянии, приводя к образованию статического трения между бурильной колонной 106 и стенкой ствола 105. Это статическое трение должно быть преодолено перед продолжением бурения.
В соответствии с аспектами настоящего изобретения статическое трение в целом может быть предотвращено или уменьшено посредством непрерывного вращения бурильной колонны 106. В частных вариантах реализации входной крутящий момент может быть оптимизирован таким образом, чтобы обеспечивать минимальный входной крутящий момент, требуемый для непрерывного вращения бурильной колонны 106 без вращения бурового долота 112, что изменило бы его азимутальную ориентацию. Оптимизированный крутящий момент/вращение может быть альтернативно применено в первом направлении и втором направлении для обеспечения возможности по существу непрерывного вращения без вращения бурового долота. В частных вариантах реализации минимальный входной крутящий момент может быть применен к бурильной колонне 106 через верхний привод 116, присоединенный к бурильной колонне 106. Верхний привод 116 может быть присоединен к расположенному на поверхности блоку 113 управления и может содержать двигатель, прикладывающий крутящий момент к бурильной колонне 106, по меньшей мере частично на основании командного сигнала, сгенерированного расположенным на поверхности блоком 113 управления. Например, верхний привод 116 может содержать контроллер, принимающий командный сигнал от расположенного на поверхности блока 113 управления, и обеспечивает приложение двигателем в верхнем приводе 116 определенного крутящего момента к бурильной колонне 106. В других вариантах реализации командный сигнал от расположенного на поверхности блока 113 управления может управлять двигателем непосредственно. В других вариантах реализации командный сигнал может быть сгенерирован в системе обработки информации, встроенной в верхний привод 106.
Как описано ранее, расположенный на поверхности блок 113 управления может содержать процессор и по меньшей мере одно запоминающее устройство. По меньшей мере одно запоминающее устройство может содержать набор инструкций, которые при выполнении процессором, обеспечивают выполнение процессором определения угловой скорости по меньшей мере части бурильной колонны 106, определения порогового значения угловой скорости для предотвращения статического трения, определения минимального входного крутящего момента для приложения к бурильной колонне для поддержания угловой скорости на пороговом значении угловой скорости или выше него, и генерации управляющего сигнала к двигателю верхнего привода, по меньшей мере частично основанного на минимальном входном крутящем моменте. Минимальный входной крутящий момент может соответствовать минимальному входному крутящему моменту, обеспечивающему по существу предотвращение статического трения на бурильную колонну, при этом потребляя наименьшее количество энергии. В частных вариантах реализации расположенный на поверхности блок 113 управления также может принимать измерения от скважинных датчиков относительно определенных скважинных условий в режиме реального времени, таких как угловая скорость, которые могут быть использованы в качестве обратной связи определения минимального входного крутящего момента в соответствии со следующим описанием. В частных вариантах реализации расположенный на поверхности блок 113 управления также выполнен с возможностью вычисления или определения конкретных значений, таких как угловая скорость, с использованием математической модели бурильной колонны 106, вместо фактического значения измерения. В частных вариантах реализации расположенный на поверхности блок 113 управления может содержать множество систем обработки информации, взаимодействующих для осуществления описанных ранее функций.
На фиг. 2 представлена диаграмма, иллюстрирующая приведенную в качестве примера систему 200 обработки информации в соответствии с аспектами настоящего изобретения. Процессор или ЦП 201 системы 200 обработки информации присоединен к контроллеру-концентратору памяти или северному мосту 202 с возможностью обмена данными. Контроллер-концентратор 202 памяти может содержать контроллер памяти для направления информации в различные системные компоненты памяти или из них в системе 200 обработки информации, например ОЗУ 203, элемент 206 хранения и жесткий диск 207. Контроллер-концентратор 202 памяти может быть присоединен к ОЗУ 203 и блоку 204 графической обработки. Контроллер-концентратор 202 памяти может также быть присоединен к контроллеру-концентратору ввода-вывода или южному мосту 205. Концентратор 205 ввода-вывода присоединен к элементам хранения системы 200 обработки информации, включая элемент 206 хранения, который может содержать флэш-ПЗУ, содержащее базовую систему ввода-вывода (BIOS) компьютерной системы. Концентратор 205 ввода-вывода также присоединен к жесткому диску 207 системы 200 обработки информации. Концентратор 205 ввода-вывода может также быть присоединен к ультрабольшой ИС 208 ввода-вывода, которая присоединена к нескольким портам ввода-вывода компьютерной системы, включая клавиатуру 209 и мышь 210. В частных вариантах реализации ультрабольшой ИС 208 ввода-вывода может быть использован для передачи командных сигналов к верхнему приводу, аналогичному верхнему приводу 116 на фиг. 1.
В соответствии с аспектами настоящего описания система обработки информации может использовать по меньшей мере одну функцию стоимости для определения минимальной силы крутящего момента, требуемой для непрерывного вращения бурильной колонны без вращения бурового долота. Как описано далее, по меньшей мере одна функция стоимости может быть использована в сочетании с математической моделью системы наклонно-направленного бурения или может быть использована с обратной связью системы без математической модели системы наклонно-направленного бурения.
На фиг. 3A и 3В представлены диаграммы, иллюстрирующие приведенную в качестве примера математическую модель системы наклонно-направленного бурения, которая может быть использована для определения минимального входного крутящего момента. В частных вариантах реализации модель может содержать модель с сосредоточенными массами, в которой буровая компоновка разделена на сегменты, которые моделируют отдельно в качестве пружинной системы с одной массой. На фиг. 3A представлена диаграмма, иллюстрирующая приведенную в качестве примера систему наклонно-направленного бурения, разделенную на множество сегментов 301(1)-(n). Каждый из сегментов 301(1)-(n) может быть моделирован в качестве пружинной системы с одной массой, причем каждый из сегментов 301(1)-(n) соответствует различной силе J инерции, коэффициенту c трения и пружинному коэффициенту k. Последний сегмент 301(n) модели 300 может содержать сегмент непосредственно над буровым долотом и кривым переходником. Как описано далее, крутящий момент может быть оптимизирован таким образом, чтобы угловая скорость сегмента 301(n) обеспечивала предотвращение статического трения, при этом не передавая крутящий момент буровому долоту, которое должно азимутально оставаться в неподвижном состоянии.
На фиг. 3B представлена диаграмма, иллюстрирующая приведенную в качестве примера модель 350 с сосредоточенными массами, содержащая пружинные системы с одной массой, соответствующие каждому из сегментов 301(1)-(n). Каждый из сегментов 301(1)-(n) может быть соединен последовательно. Как показано, крутящий момент τin может быть применен к первому сегменту 301(1) от контроллера 302. Контроллер 302 может быть аналогичным расположенному на поверхности блоку 113 управления на фиг. 1, и может включать контроллер внутри верхнего привода. Каждый из сегментов 301(1)-(n) может иметь соответствующую угловую ориентацию θ, угловую скорость θ• и угловое ускорение θ••. Динамика каждого сегмента может быть выражена с использованием следующего уравнения:
Ji-ki-1(θi-θi-1)+ki(θi+1-θi)-ci*mi*r*cosϕi+τext=0
где θ0=θ1 и θn+1=θn; τext выражают крутящий момент, применяемый на поверхности через верхний привод (i=1), или реактивный крутящий момент горной породы на буровое долото (i=n); mi - выражает массу для сегмента i; а r выражает радиус бурильной колонны. Коэффициент ci трения для каждого сегмента может быть выражен следующим образом:
ci=ci,s причем θ•j=0; ci,k причем θ•i>0
где ci,s выражает коэффициент статического трения при угловой скорости θ•i сегмента, составляющей ноль, а ci,k выражает коэффициент кинетического трения при угловой скорости 0•i сегмента, составляющим ноль, или больше ноля.
Входной крутящий момент τin может обеспечивать вращение некоторых или всех сегментов 301(1)-(n) на определенной угловой скорости θ•. Например, сегмент 301(2) выполнен с возможностью вращения с угловой скоростью θ•2. В частных вариантах реализации каждый из сегментов под первым сегментом может быть присоединен к датчику в сборе или блоку 303(1)-(n) наблюдения, обеспечивающему генерацию вычисленного значения θe•i для соответствующей угловой скорости θ•i. Угловая скорость θ•1 первого сегмента 301(1) может быть определена непосредственно из скорости верхнего привода, прикладывающего входной крутящий момент τin, и, таким образом, не требует датчика в сборе или блока наблюдения.
В соответствии с частными аспектами настоящего изобретения указанные ранее уравнения могут быть использованы для моделирования буровой компоновки, а модель может быть использована в сочетании с функцией стоимости системой обработки информации для определения или вычисления минимального входного крутящего момента и для генерации соответствующего управляющего сигнала для минимизации энергии, требуемой для предотвращения статического трения на бурильной колонне. Функция стоимости может соответствовать схеме управления на основе прогнозирующих моделей, которая может быть выполнена внутри контроллера или процессора, присоединенного к верхнему приводу. В сложных системах схемы управления на основе прогнозирующих моделей могут прогнозировать изменение в зависимых переменных моделируемой системы, которые будут вызваны изменениями в независимых переменных. Независимые переменные обычно являются переменными, которые могут быть регулированы контроллером. Зависимые переменные включают измерения, соответствующие целям управления или технологическим ограничениям. Как описано далее, схема управления на основе прогнозирующих моделей может использовать настоящие измерения, настоящее динамическое состояние системы, модели системы и ограничения для вычисления будущих изменений в зависимых переменных. Эти изменения вычисляют для удержания зависимых переменных близко к цели, например, минимальное значение энергии, при этом удовлетворяя ограничениям независимых и зависимых переменных. Схема управления на основе прогнозирующих моделей может отправлять только первое изменение в каждой независимой переменной для осуществления, и повторять вычисления при необходимости следующего изменения.
Приведенная в качестве примера функция стоимости может содержать следующее уравнение (CF1):

где In,s(t) выражает состояние статического трения сегмента непосредственно над буровым долотом в определенное время t; 0 до Т выражает промежуток времени для вычисления; dτin/dt выражает скорость изменения сигналов входного крутящего момента; a W1 и W2 выражают весовые коэффициенты, накладывающие штраф на отсутствие движения сегмента над буровым долотом (W1) и сигналы неплавного крутящего момента (W2). При переходе бурильной колонны от кинетического к статическому трению, крутящий момент, измеренный на поверхности изменится, dτin/dt может быть использован для блокирования ненужных изменений в крутящем моменте. Дополнительно, значение переменной Ii,s состояния статического трения сегмента может составлять ноль, если сегмент находится в движении, и один, если сегмент не находится в движении и существует возможность образования статического трения.
Функция CF1 стоимости может зависеть от модели буровой компоновки, как выражено в следующих уравнениях модели:



 .
.
Уравнения М1-М4 модели могут линейно выражать трение модели на фиг. 3А и 3В. Например, статические переменные Ii,s и Ii,k трения для данного сегмента могут указывать на то, подвержен ли сегмент силам статического трения, посредством изменения Ii,s на 1 и Ii,k на 0. Аналогично, статические переменные Ii,s и трения для данного сегмента могут указывать на то, подвержен ли сегмент силам кинетического трения, посредством изменения Ii,k на 1 и Ii,s и 0. Это удовлетворяет М4 и М2, и может быть использовано для изменения коэффициента ci трения на коэффициент ci,s статического трения или коэффициент сi,k кинетического трения для данного периода времени. Так как функция стоимости минимизирует входную энергию и ci,s>ci,k, Ii,k=1 является предпочтительным. Что касается М3, θ•safe может выражать минимальную скорость или пороговое значение для сегмента, который предположительно находится в движении без образования статического трения. Может быть выбрано минимальное значение θ•safe, однако следует учитывать непредвиденные изменения, вызываемые фактором бурения, посредством включения дополнительного страхового коэффициента. Страховой коэффициент может быть выбран, например, с использованием рабочих данных и статистического анализа для обеспечения низкой вероятности образования статического трения.
Функция стоимости может также зависеть от следующих ограничений:

Уравнение С1, например, ограничивает крутящий момент τin к применению к системе производительностью верхнего приводного механизма. Уравнение С2 обеспечивает отсутствие накапливания энергии в бурильной колонне на временном периоде от 0 до Т. Хотя показаны только два ограничения, могут быть добавлены другие, включая ограничение скорости изменения крутящего момента.
В частных вариантах реализации первый входной крутящий момент может быть применен к моделированной буровой компоновке, а угловые скорости каждого сегмента могут быть определены. Из этих угловых скоростей может быть определено, находится ли каждый из сегментов в движении со значением θ•safe или выше него, для предотвращения статического трения. Различные значения входного крутящего момента τin могут быть использованы для идентификации значения минимального входного крутящего момента, предотвращающего статическое трение на каждом из сегментов, при этом используя наименьшее количество энергии. Различный минимальный входной крутящий момент может быть определен для каждого из заранее определенного количества временных сегментов, причем модель буровой компоновки отображает скважинные условия, вызванные входным оптимизированным крутящим моментом от предыдущего временного сегмента. В частных вариантах реализации фактические измерения скважинной угловой скорости могут быть использованы для подтверждения и обновления модели.
Приведенный в качестве примера минимальный входной крутящий момент τin, сгенерированный с использованием CF1 изображен на фиг. 4А. Входной крутящий момент τin может быть установлен на максимальное значение τmax в первом временном интервале Т1 до вращения большей части бурильной колонны. Затем, крутящий момент  может быть уменьшен до минимального значения τmin без перехода в статическое состояние для минимизации энергии, требуемой для вращения бурильной колонны без вращения передней грани резца. В конце временного интервала T, направление входного крутящего момента τin может быть обращено для освобождения энергии, накапливаемой в бурильной колонне, и для скручивания бурильной колонны в противоположном направлении. Для поддержания движения внутри бурильной колонны без вращения бурового долота требуется постоянное скручивание и раскручивание бурильной колонны, и приложение крутящего момента в обоих направлениях для поддержания движения в бурильной колонне без вращения бурового долота.
может быть уменьшен до минимального значения τmin без перехода в статическое состояние для минимизации энергии, требуемой для вращения бурильной колонны без вращения передней грани резца. В конце временного интервала T, направление входного крутящего момента τin может быть обращено для освобождения энергии, накапливаемой в бурильной колонне, и для скручивания бурильной колонны в противоположном направлении. Для поддержания движения внутри бурильной колонны без вращения бурового долота требуется постоянное скручивание и раскручивание бурильной колонны, и приложение крутящего момента в обоих направлениях для поддержания движения в бурильной колонне без вращения бурового долота.
Минимальный входной крутящий момент τin, изображенный на фиг. 4, может быть охарактеризован тремя параметрами: T, T1 и τ1. Первый параметр T может соответствовать периоду сигнала крутящего момента, причем большее значение приводит к приложению большего количества энергии к бурильной колонне, а меньшее значение приводит к более частому переключению между направлениями вращения. Второй параметр T1 выражает время, на протяжении которого верхний привод обеспечивает свой максимальный крутящий момент. В частных вариантах реализации T1 может быть оптимизирован таким образом, чтобы передавать достаточное количество энергии для вращения массы нижней части, однако со скоростью, достаточной только для предотвращения статического трения. Третий параметр τ1 выражает крутящий момент, поддержание которого требуется на верхнем участке после начала вращения сегмента над буровым долотом.
Хотя минимальный входной крутящий момент τin может содержать прямоугольную волну, по существу применение такого типа крутящего момента к верхней приводной системе может быть затруднено. На фиг. 4 В изображен приведенный в качестве примера управляющий сигнал, по меньшей мере частично основанный на минимальном входном крутящем моменте τin, но учитывающий другие ограничения физической системы. Например, верхний привод для системы может иметь максимально допустимый ток, а ток, требуемый для приведения верхнего привода в движение прямоугольной волной или волной, по форме приближенной к прямоугольной, может превосходить этот ток. С ограничением допустимого тока резкое увеличение угловой скорости верхнего привода может быть исключено, требуя более постепенного управляющего сигнала, как показано на фиг. 4В.
В соответствии с аспектами настоящего изобретения минимальный входной крутящий момент может также быть определен без модели, с использованием способа, основанного на обратной связи. На фиг. 5 представлена диаграмма, иллюстрирующая приведенную в качестве примера систему управления, не содержащую модели, в соответствии с аспектами настоящего изобретения. В изображенном варианте реализации система 500 управления может оптимизировать входной крутящий момент τin посредством вычисления оптимизированных параметров для входного крутящего момента τin, таких как параметры по фиг. 4. В частности, генератор 501 сигнала может генерировать входной крутящий момент τin с подобной изображенной на фиг. 4 формой, причем параметры T1 и τ1 определены с использованием функции 502 стоимости. Крутящий момент τin, сгенерированный генератором 501 сигнала, может быть использован в качестве ввода в алгоритм 502 оптимизации. Измеренная угловая скорость θ•bot или вычисленная угловая скорость θe•bot участка бурильной колонны над буровым долотом может также быть использована в качестве ввода в функцию 502 стоимости.
В частных вариантах реализации функция 502 стоимости может содержать форму управления поиска экстремума. Например, в изображенном варианте реализации функция 502 стоимости содержит:

где θ•bot выражает измеренную угловую скорость или вычисленную угловую скорость участка бурильной колонны над буровым долотом; θ•tор выражает угловую скорость на верхнем участке бурильной колонны, соединенной с верхним приводом; θ•safe выражает минимальную скорость для сегмента, который предположительно находится в движении без образования статического трения; dτin/dt выражает скорость изменения сигналов входного крутящего момента; a W1, W2 и W3 выражают весовые коэффициенты, соответствующие изменениям скорости нижнего участка, скорости верхнего участка и крутящего момента, соответственно. Первое условие (θ•safe-θ•bot)2 квадратично увеличивает значение, на которое угловая скорость участка бурильной колонны над буровым долотом падает ниже минимальной скорости, требуемой для предотвращения статического трения. Идеально, θ•bot приближается к равенству с θ•safe для обнуления этого условия. Второе условие включает θ•tор для минимизации скорости и, следовательно, энергии, требуемой для вращения верхнего участка бурильной колонны. Идеально, θ•tор имеет максимально низкое значение для поддержания нижнего участка бурильной колонны на значении θ•safe. Третье условие, выражающее скорость изменения крутящего момента, идеально имеет низкое значение для уменьшения крупных изменений крутящего момента.
Вывод функции 502 стоимости может быть выведен через фильтр 503 низких частот. Модулирующий сигнал 504 может быть использован для генерации неоднородностей в системах для определения градиента функции 502 стоимости. В изображенном варианте реализации модулирующий сигнал 504 содержит a sin wt. Модулирующий сигнал 504 может быть добавлен к T1 и τ1 с различной величиной и частотой, обеспечивая возможность отдельного измерения их эффекта. После получения значения функции стоимости, модулирующий сигнал 504 умножают на значение функции стоимости для демодуляции информации градиента. После нахождения градиента, генератор 501 сигнала изменяет номинальный входной крутящий момент τin для нахождения оптимальных рабочих условий для функции 502 стоимости.
На фиг. 6 представлена диаграмма, иллюстрирующая приведенную в качестве примера систему 600 управления в соответствии с аспектами настоящего изобретения. Система 600 управления аналогична системе 500 управления, за исключением того, что входной крутящий момент τin не параметризован в форме, изображенной на фиг 4. В отличие от этого, переключающий модуль 601 использован для настройки весовых коэффициентов функции 602 стоимости. Например, сначала, W1 и W3 могут быть установлены на 0, a W2 может являться отрицательным числом. В результате, функция 602 стоимости стремится к максимальной скорости на верхнем участке, что приводит к максимальному входному крутящему моменту τin. При обнаружении внезапных изменений во входном крутящем моменте, или если вычисленная скорость нижнего участка превышает 0, переключающий модуль 601 может изменять W1 и/или W3 на очень большое число, a W2 на маленькое число. При таких весовых коэффициентах функция 602 стоимости затем будет стремиться к удержанию максимально медленной скорости нижнего участка и/или удержанию максимально плавного входного крутящего момента. В частных вариантах реализации эта система 600 управления может быть использована для непрерывного управления системой с использованием одинакового контроллера посредством изменения весовых коэффициентов для учета различных рабочих режимов.
Следовательно, настоящее изобретение хорошо приспособлено для достижения описанных и свойственных результатов и преимуществ. Частные варианты реализации, описанные ранее, являются иллюстративными, так как настоящее изобретение может быть модифицировано и реализовано другими, но эквивалентными способами, понятными специалистам в данной области техники, у которых есть возможность ознакомиться с настоящим описанием. Кроме того, описанные в настоящем описании подробности конструкции или проекта не содержат ограничений за исключением описанных далее в формуле изобретения. Таким образом, следует понимать, что частные иллюстративные варианты реализации, раскрытые ранее, могут быть изменены или модифицированы, при этом все такие изменения находятся в пределах объема и сущности настоящего изобретения. Также, термины в формуле изобретения использованы в их простом, обычном значении, если обратное явным образом не указано заявителем. Под использованной в формуле изобретения формой единственного числа следует понимать один или большее количество элементов.




Группа изобретений относится к способу управления вращением и к устройству для вращения бурильной колонны. Технический результат заключается в преодолении статического трения с наименьшим потреблением энергии. Согласно способу управления вращением бурильной колонны, присоединенной к буровому долоту внутри ствола, определяют угловую скорость по меньшей мере части бурильной колонны, определяют пороговое значение угловой скорости для предотвращения статического трения, определяют минимальный входной крутящий момент для приложения к бурильной колонне для поддержания угловой скорости на пороговом значении угловой скорости или выше него, после чего генерируют управляющий сигнал для двигателя верхнего привода по меньшей мере частично на основании минимального входного крутящего момента. 2 н. и 18 з.п. ф-лы, 6 ил.
1. Способ управления вращением бурильной колонны, присоединенной к буровому долоту внутри ствола, согласно которому:
определяют угловую скорость по меньшей мере части бурильной колонны;
определяют пороговое значение угловой скорости для предотвращения статического трения;
определяют минимальный входной крутящий момент для приложения к бурильной колонне для поддержания угловой скорости на пороговом значении угловой скорости или выше него; и
генерируют управляющий сигнал для двигателя верхнего привода по меньшей мере частично на основании минимального входного крутящего момента.
2. Способ по п. 1, согласно которому определение угловой скорости участка бурильной колонны включает одно из получения измерения угловой скорости изнутри ствола и вычисления угловой скорости с использованием математической модели бурильной колонны.
3. Способ по п. 2, согласно которому
определение угловой скорости по меньшей мере части бурильной колонны включает определение угловой скорости первого сегмента бурильной колонны, примыкающего к буровому долоту; и
первый сегмент является одним из множества сегментов модели с сосредоточенными массами, соответствующей бурильной колонне.
4. Способ по п. 3, согласно которому определение минимального входного крутящего момента включает использование схемы управления на основе прогнозирующих моделей с функцией стоимости.
5. Способ по п. 3, согласно которому определение минимального входного крутящего момента включает использование схемы управления на основе прогнозирующих моделей со следующей функцией стоимости:
где In,s(t) выражает состояние статического трения первого сегмента в данное время t; 0 до Т выражает временной период для вычислений; dτin/dt выражает скорость изменений входного крутящего момента; a W1 и W2 выражают весовые коэффициенты, накладывающие штраф на статическое трение на первом сегменте и сигналы неплавного крутящего момента, соответственно.
6. Способ по п. 5, согласно которому функция стоимости зависит от следующих уравнений модели:



 или 1;
или 1;
и следующих уравнений:


где θi выражает угловую ориентацию сегмента модели с сосредоточенными массами;  выражает угловую скорость сегмента модели с сосредоточенными массами;
выражает угловую скорость сегмента модели с сосредоточенными массами;  выражает угловое ускорение сегмента модели с сосредоточенными массами; Ji выражает силу инерции сегмента модели с сосредоточенными массами; ci выражает коэффициент трения сегмента модели с сосредоточенными массами; ci,s выражает коэффициент статического трения сегмента модели с сосредоточенными массами; ci,k выражает коэффициент кинетического трения сегмента модели с сосредоточенными массами; ki выражает пружинный коэффициент сегмента модели с сосредоточенными массами; Ii,s содержит состояние статического трения сегмента модели с сосредоточенными массами; Ii,k содержит состояние кинетического трения сегмента модели с сосредоточенными массами;
выражает угловое ускорение сегмента модели с сосредоточенными массами; Ji выражает силу инерции сегмента модели с сосредоточенными массами; ci выражает коэффициент трения сегмента модели с сосредоточенными массами; ci,s выражает коэффициент статического трения сегмента модели с сосредоточенными массами; ci,k выражает коэффициент кинетического трения сегмента модели с сосредоточенными массами; ki выражает пружинный коэффициент сегмента модели с сосредоточенными массами; Ii,s содержит состояние статического трения сегмента модели с сосредоточенными массами; Ii,k содержит состояние кинетического трения сегмента модели с сосредоточенными массами;  выражает пороговое значение угловой скорости; τmin выражает минимальное значение крутящего момента верхнего привода; а τmax содержит максимальное значение крутящего момента верхнего привода.
выражает пороговое значение угловой скорости; τmin выражает минимальное значение крутящего момента верхнего привода; а τmax содержит максимальное значение крутящего момента верхнего привода.
7. Способ по п. 2, согласно которому определение минимального входного крутящего момента включает получение по меньшей мере одного сигнала обратной связи, соответствующего рабочему состоянию бурильной колонны.
8. Способ по п. 2, согласно которому определение минимального входного крутящего момента включает решение следующей функции стоимости:

где  содержит одно из измеренной угловой скорости или вычисленной угловой скорости участка бурильной колонны;
содержит одно из измеренной угловой скорости или вычисленной угловой скорости участка бурильной колонны;  содержит угловую скорость на верхнем участке бурильной колонны;
содержит угловую скорость на верхнем участке бурильной колонны;  содержит пороговое значение угловой скорости; dτin/dt выражает скорость изменения входного крутящего момента; a W1, W2 и W3 содержат весовые коэффициенты.
содержит пороговое значение угловой скорости; dτin/dt выражает скорость изменения входного крутящего момента; a W1, W2 и W3 содержат весовые коэффициенты.
9. Способ по п. 8, согласно которому генерация управляющего сигнала включает получение параметра входного крутящего момента по меньшей мере частично на основании функции стоимости.
10. Способ по п. 8, согласно которому определение минимального входного крутящего момента содержит изменение по меньшей мере одного из весовых коэффициентов.
11. Устройство для вращения бурильной колонны, присоединенной к буровому долоту внутри ствола, содержащее:
процессор; и
запоминающее устройство, присоединенное к процессору, причем запоминающее устройство содержит набор инструкций, которые при выполнении процессором обеспечивают выполнение процессором
определения угловой скорости по меньшей мере части бурильной колонны;
определения порогового значения угловой скорости для предотвращения статического трения;
определения минимального входного крутящего момента для приложения к бурильной колонне для поддержания угловой скорости на пороговом значении угловой скорости или выше него; и
генерации управляющего сигнала для двигателя верхнего привода, по меньшей мере частично на основании минимального входного крутящего момента.
12. Устройство по п. 11, в котором набор инструкций, обеспечивающих определение процессором угловой скорости участка бурильной колонны, дополнительно обеспечивает осуществление процессором одного из приема измерения угловой скорости из ствола и вычисления угловой скорости с использованием математической модели бурильной колонны.
13. Устройство по п. 12, в котором
по меньшей мере часть бурильной колонны содержит первый сегмент бурильной колонны, примыкающий к буровому долоту; и
первый сегмент является одним из множества сегментов модели с сосредоточенными массами, соответствующей бурильной колонне.
14. Устройство по п. 13, в котором набор инструкций, обеспечивающих определение процессором минимального входного крутящего момента, дополнительно обеспечивает выполнение процессором схемы управления на основе прогнозирующих моделей с функцией стоимости.
15. Устройство по п. 14, в котором функция стоимости содержит:
где In,s(t) выражает состояние статического трения первого сегмента в данное время t; 0 до Т выражает временной период для вычислений; dτin/dt выражает скорость изменений входного крутящего момента; a W1 и W2 выражают весовые коэффициенты, накладывающие штраф на статическое трение на первом сегменте и сигналы неплавного крутящего момента, соответственно.
16. Устройство по п. 15, в котором функция стоимости зависит от следующих уравнений модели:

 или
или 

 ;
;
и следующих ограниченных уравнений:


где  выражает угловую ориентацию сегмента модели с сосредоточенными массами;
выражает угловую ориентацию сегмента модели с сосредоточенными массами;  выражает угловую скорость сегмента модели с сосредоточенными массами;
выражает угловую скорость сегмента модели с сосредоточенными массами;  выражает угловое ускорение сегмента модели с сосредоточенными массами; Ji выражает силу инерции сегмента модели с сосредоточенными массами; ci выражает коэффициент трения сегмента модели с сосредоточенными массами; ci,s выражает коэффициент статического трения сегмента модели с сосредоточенными массами; ci,k выражает коэффициент кинетического трения сегмента модели с сосредоточенными массами; ki выражает пружинный коэффициент сегмента модели с сосредоточенными массами; Ii,s содержит состояние статического трения сегмента модели с сосредоточенными массами; содержит состояние кинетического трения сегмента модели с сосредоточенными массами;
выражает угловое ускорение сегмента модели с сосредоточенными массами; Ji выражает силу инерции сегмента модели с сосредоточенными массами; ci выражает коэффициент трения сегмента модели с сосредоточенными массами; ci,s выражает коэффициент статического трения сегмента модели с сосредоточенными массами; ci,k выражает коэффициент кинетического трения сегмента модели с сосредоточенными массами; ki выражает пружинный коэффициент сегмента модели с сосредоточенными массами; Ii,s содержит состояние статического трения сегмента модели с сосредоточенными массами; содержит состояние кинетического трения сегмента модели с сосредоточенными массами;  выражает пороговое значение угловой скорости; τmin выражает минимальное значение крутящего момента верхнего привода; а τmax содержит максимальное значение крутящего момента верхнего привода.
выражает пороговое значение угловой скорости; τmin выражает минимальное значение крутящего момента верхнего привода; а τmax содержит максимальное значение крутящего момента верхнего привода.
17. Устройство по п. 12, в котором набор инструкций, обеспечивающих определение процессором минимального входного крутящего момента, дополнительно обеспечивает прием процессором по меньшей мере одного сигнала обратной связи, соответствующего рабочему состоянию бурильной колонны.
18. Устройство по п. 12, в котором набор инструкций, обеспечивающих определение минимального входного крутящего момента процессором, дополнительно обеспечивает решение процессором следующей функции стоимости:

где  содержит одно из измеренной угловой скорости или вычисленной угловой скорости участка бурильной колонны;
содержит одно из измеренной угловой скорости или вычисленной угловой скорости участка бурильной колонны;  содержит угловую скорость на верхнем участке бурильной колонны;
содержит угловую скорость на верхнем участке бурильной колонны;  содержит пороговое значение угловой скорости; dτin/dt выражает скорость изменения входного крутящего момента; a W1, W2 и W3 содержат весовые коэффициенты.
содержит пороговое значение угловой скорости; dτin/dt выражает скорость изменения входного крутящего момента; a W1, W2 и W3 содержат весовые коэффициенты.
19. Устройство по п. 18, в котором набор инструкций, обеспечивающих выполнение процессором генерации управляющего сигнала, дополнительно обеспечивает определение процессором параметра входного крутящего момента, по меньшей мере частично основанного на функции стоимости.
20. Устройство по п. 18, в котором набор инструкций, обеспечивающих выполнение процессором определения минимального входного крутящего момента, дополнительно обеспечивает изменение по меньшей мере одного из весовых коэффициентов процессором.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| УЗЕЛ И СПОСОБ РЕГУЛИРОВАНИЯ ЭНЕРГИИ КРУЧЕНИЯ БУРИЛЬНОЙ КОЛОННЫ | 2004 |
|
RU2329376C2 |
| Способ проводки наклонного ствола скважины забойным двигателем | 1987 |
|
SU1550071A1 |
| Способ регулирования режимов бурения | 1984 |
|
SU1146417A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 6918453 B2, 19.07.2005. | |||

