Область техники
Настоящее изобретение относится к способу и системе для устранения или значительного снижения скачкообразных колебаний в бурильной колонне, к способу бурения скважины, к буровому механизму для использования при бурении скважины и к электронному устройству управления для использования с буровым механизмом.
Уровень техники
Бурение скважины для добычи нефти и/или газа связано с проходкой буровой скважины значительной длины, часто длиной в несколько километров по вертикали и/или горизонтали, перед тем, как начинается добыча. Бурильная колонна содержит буровое долото на своем нижней конце и секции бурильной трубы, свинченные друг с другом. Вся бурильная колонна приводится во вращение буровым механизмом на поверхности и, в свою очередь, вращает буровое долото. В типовом случае вращающаяся часть бурового механизма представляет собой верхний привод, состоящий из одного или двух двигателей с передаточным механизмом и вращающий верхнюю часть колонны с достаточным крутящим моментом и скоростью. Механизмом для осевого управления положением бурового механизма в типовом случае бывает лебедка (обычно называемая буровой лебедкой), управляющая подвижным блоком, который соединен с верхним приводом и управляет его вертикальным движением.
Бурильная колонна представляет собой чрезвычайно тонкую конструкцию по сравнению с длиной буровой скважины, и в процессе бурения она скручивается на несколько оборотов под действием общего крутящего момента, необходимого для вращения бурильной колонны и бурового долота. Крутящий момент может иметь величину порядка 10-50 кН⋅м. Бурильная колонна проявляет также сложное динамическое поведение, в том числе осевые, поперечные и крутильные колебания. Одновременные измерения бурового вращения на поверхности и на буровом долоте показали, что бурильная колонна часто ведет себя как крутильный маятник, то есть верх бурильной колонны вращается с постоянной угловой скоростью, тогда как буровое долото совершает вращение с изменяющейся угловой скоростью, которая включает в себя постоянную компоненту и наложенные на нее крутильные колебания. В экстремальных случаях крутильная компонента становится такой большой, что буровое долото периодически совсем останавливается, и в эти периоды бурильная колонна скручивается до тех пор, пока буровое долото не начнет внезапно снова вращаться и разгонится до угловой скорости, намного превышающей скорость верхнего привода. Это явление известно под названием скачкообразное (прерывистое) движение или, более точно, крутильное скачкообразное движение. Измерения и моделирование показали также, что бурильная колонна иногда может проявлять осевое скачкообразное движение, особенно когда она поднимается или опускается с умеренной скоростью. Это движение характеризуется большими колебаниями осевой скорости на нижнем конце бурильной колонны и может наблюдаться на поверхности как значительные колебания верхнего напряжения, обычно называемого «нагрузкой на крюке». Период наблюдаемых колебаний скачкообразного движения наиболее часто бывает близким к периоду самой низкой моды собственного резонанса.
Крутильное скачкообразное движение изучалось более двух десятилетий и признано основным источником проблем, таких как интенсивный износ бурового долота, преждевременные повреждения инструмента и низкая скорость проходки скважины. Одной из причин этого являются высокие пиковые скорости в фазе скачка. В свою очередь высокие скорости вращения приводят к вторичным явлениям, таким как осевые и поперечные ускорения и силы.
Обширная литература и множество статей были посвящены проблеме скачкообразного движения. Многие работы концентрируются на выявлении скачкообразного движения и на сдерживании колебаний с помощью эксплуатационных средств, таких как добавки уменьшителей трения в буровой раствор, изменение скорости вращения или использование дополнительных грузов на буровом долоте. Хотя в отдельных случаях эти меры помогают, они либо недостаточны, либо связаны с высокими дополнительными затратами.
В нескольких документах рекомендуется также применение интеллектуального управления верхним приводом для демпфирования и предотвращения скачкообразных колебаний. В документе IADC/SPE 1049 было продемонстрировано, что обратная связь по крутящему моменту от предназначенного для бурильной колонны датчика крутящего момента может эффективно гасить колебания посредством регулирования скорости в ответ на измеренные колебания крутящего момента. В работе авторов Jansen et al. "Active Damping of Self-Excited Torsional Vibrations in Oil Well Drillstrings" («Активное демпфирование самовозбуждающихся крутильных колебаний в бурильных колоннах нефтяных скважин»), 179 (4), 547-668, было высказано предположение о том, что недостатком этого подхода является необходимость в новом и непосредственном измерении скручивания бурильной колонны, которого пока нет в распоряжении. В патентном документе US 5117926 это измерение описано как другой тип обратной связи, основанной на текущем крутящем моменте двигателя и скорости. Эта система имеется на рынке много лет под маркой SOFT TORQUE®. Основной недостаток системы состоит в том, что она является каскадной системой управления, использующей обратную связь по крутящему моменту последовательно с жестким регулятором скорости. Это повышает риск неустойчивости на частотах выше частоты скачкообразного движения, особенно если имеется значительная выдержка времени (50 мс или больше) в измерениях скорости и крутящего момента.
В патентной заявке PCT/GB2008/051144 описан способ демпфирования скачкообразных колебаний, при котором максимальное демпфирование имеет место в первой или базовой моде скачкообразных колебаний (то есть при самой низкой частоте) или вблизи этой моды. При разработке этого способа нужно решать дальнейшую проблему, когда бурильная колонна имеет чрезвычайно большую длину (больше, чем примерно 5 км), а базовый период скачкообразного движения превышает 5 или 6 с. Хотя способ согласно данному документу позволяет устранять базовую моду скачкообразных колебаний в таких бурильных колоннах, как только эти колебания демпфируются, вторая мода собственных колебаний имеет тенденцию становиться неустойчивой, и амплитуда увеличивается до тех пор, пока не разовьется полное скачкообразное движение на более высокой частоте. В некоторых примерах моделирования было установлено, что этот вторая мода имеет частоту собственных колебаний примерно в три раза выше частоты базового скачкообразного движения. Скачкообразные колебания более высокого порядка характеризуются циклическими изменениями крутящего момента с коротким периодом и большой амплитудой. Моделирование показывает, что в этом случае скорость вращения бурового долота изменяется от нуля до пиковых скоростей, вдвое превышающих среднюю скорость.
В более поздней патентной заявке PCT/GB2009/051618 раскрыты некоторые усовершенствования решения по предыдущей заявке, такие как компенсация инерции в сочетании с легкой отстройкой регулятора скорости верхнего привода. Эти усовершенствования расширяют ширину полосы поглощения и позволяют верхнему приводу эффективно демпфировать также вторую крутильную моду, тем самым предотвращая появление второй моды скачкообразного движения. Другим усовершенствованием является способ оценки в реальном времени скорости вращения бурового долота на основании динамических изменений приводного крутящего момента.
Полевые эксперименты и широкое тестирование с помощью отработанной имитационной модели показали, что все современные системы для демпфирования скачкообразных колебаний иногда неспособны решать проблему скачкообразного движения, особенно для очень длинных бурильных колонн длиной, скажем, больше 5000 м. Все упомянутые выше активные системы являются общими в том, что они модифицируют скорость верхнего привода в ответ на изменяющуюся нагрузку крутящего момента. Получаемое в результате демпфирование иногда, но не всегда достаточно сильно для устранения скачкообразных колебаний. Было установлено, что системы также очень чувствительны к шуму и задержке сигналов управления, то есть сигналов скорости и крутящего момента, так что даже небольшая задержка порядка 50 мс может вызывать неустойчивость на более высоких частотах.
Задачей настоящего изобретения является устранение или снижение, по меньшей мере, одного из недостатков решений уровня техники.
В соответствии с изобретением решение поставленной задачи достигается за счет признаков, раскрытых в последующем описании и пунктах формулы изобретения.
Краткий перечень чертежей, относящихся к общей части
Далее следует текст общей части описания со ссылками на прилагаемые чертежи.
На чертежах:
на фиг. 1 изображен график, где гармонические колебания устраняются одним периодом синусоидального импульса, причем абсцисса представляет приведенное время, а ордината представляет приведенную скорость вращения;
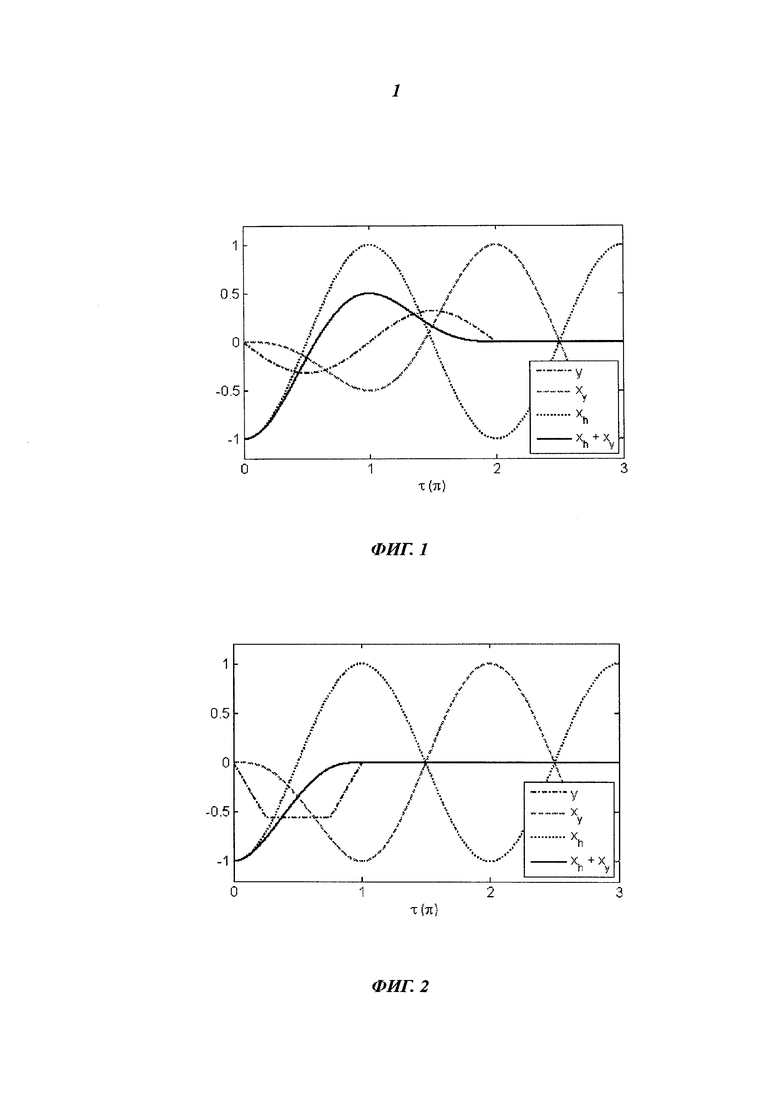
на фиг. 2 изображен график, где гармонические колебания устраняются полупериодом трапецеидального импульса, причем абсцисса представляет приведенное время, а ордината представляет приведенную скорость вращения;
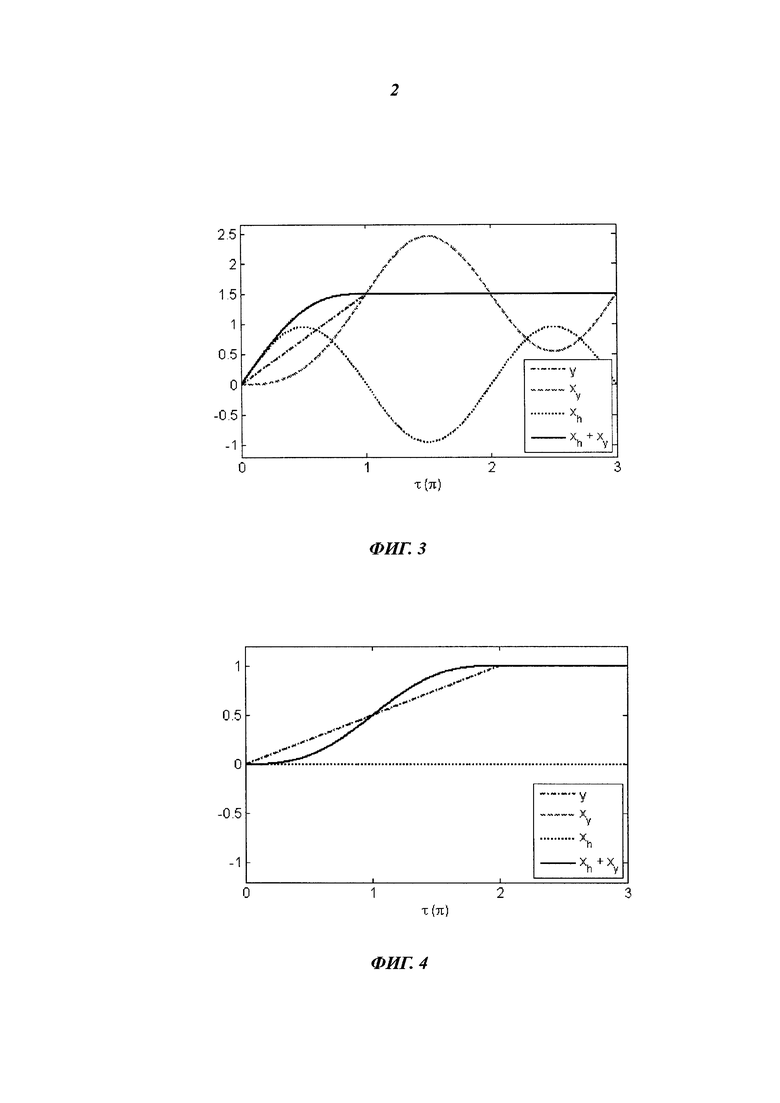
на фиг. 3 изображен график, где скорость увеличивается, а гармонические колебания устраняются полупериодом линейного изменения, причем абсцисса представляет приведенное время, а ордината представляет приведенную скорость вращения;
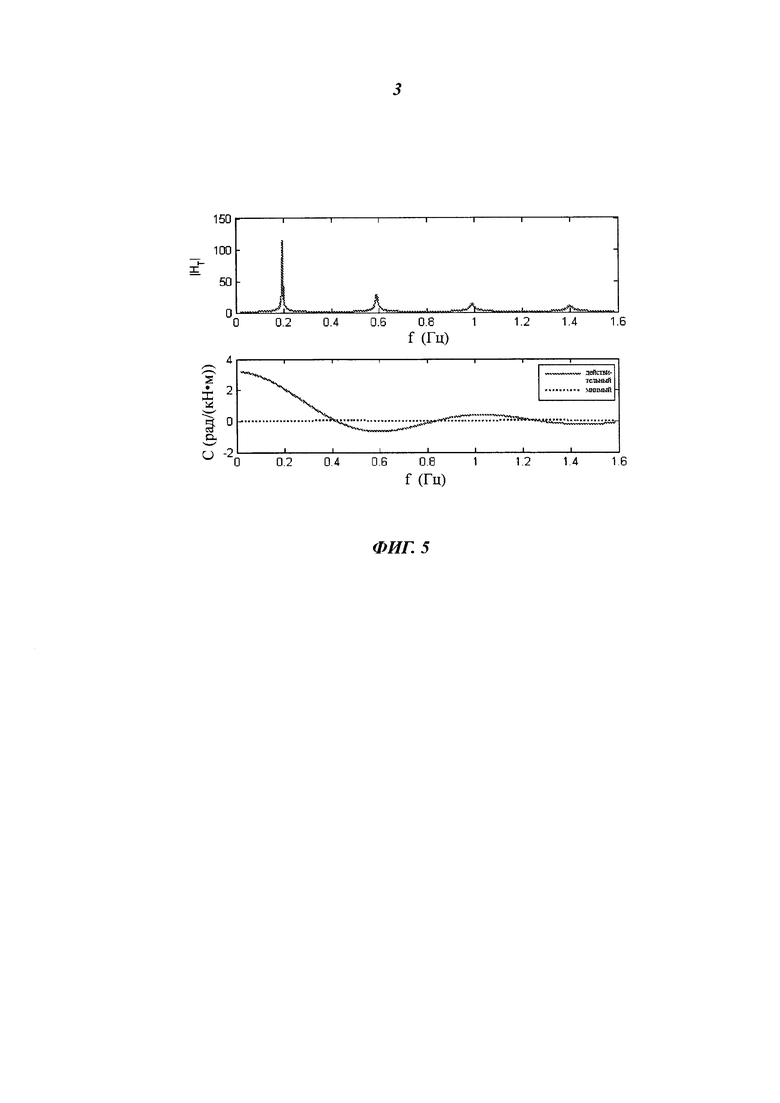
на фиг. 4 изображен график, где скорость увеличивается линейно без генерирования колебаний, причем абсцисса представляет приведенное время, а ордината представляет приведенную скорость вращения; и
на фиг. 5 изображен график вычисленного крутящего момента и ответной функции податливости в бурильной колонне длиной 3200 м, где абсцисса представляет частоту колебаний в циклах в секунду, а ордината в верхней части графика представляет отношение приведенного верхнего крутящего момента к входному крутящему моменту бурового долота, а ордината в нижней части графика представляет динамическую крутильную податливость в радианах на кН⋅м.
Сущность изобретения
Настоящее изобретение основано на понимании существа вопроса, полученном в результате полевых испытаний и моделирования с помощью передовой имитационной модели. Эта модель способна описывать одновременно осевое и крутильное движение бурильной колонны и включает в себя подмодели для тяговых механизмов и верхнего привода. Опыт обоих источников показывает, что даже самые передовые инструменты снижения скачкообразного движения не способны устранять скачкообразное движение в чрезвычайно длинных бурильных колонных в непрямых скважинах. Однако моделирование показывает, что затрудняющее скачкообразное движение может быть устранено, если придавать скорости верхнего привода ступенчатое изменение правильной величины и в нужное время. Дальнейшее исследование показало, что ряд различных кратковременных изменений скорости может устранять скачкообразное движение. Этот подход фундаментально отличается от описанных выше систем в нескольких аспектах:
- Во-первых, кратковременным изменением скорости управляют без обратной связи, то есть скорость вращения следует заданной кривой, не регулируемой в ответ на мгновенную нагрузку крутящего момента.
- Во-вторых, данный способ предусматривает относительно короткую продолжительность, составляющую порядка одного периода скачкообразного движения, тогда как предыдущие способы предусматривали непрерывную настройку скорости вращения «бесконечной» продолжительности.
- И наконец, способ не ограничивается крутильными скачкообразными колебаниями, но применим также к осевым скачкообразным колебаниям.
В соответствии с изобретением обеспечен способ уменьшения или предотвращения, по меньшей мере, осевых или крутильных колебаний в бурильной колонне с буровым долотом, присоединенным к ее нижнему концу, и управляемой подъемным механизмом и вращающим механизмом, присоединенными к ее верхнему концу, причем регулируемыми переменными являются вертикальная скорость и скорость вращения, а переменными отклика являются сила осевого натяжения и крутящий момент, отнесенные к верху бурильной колонны, отличающийся тем, что способ содержит следующие шаги:
i) выбирают по меньшей мере одну подлежащую регулированию колебательную моду бурильной колонны;
ii) выполняют мониторинг регулируемой переменной и переменной отклика, релевантных для указанной колебательной моды;
iii) определяют период колебаний указанной моды;
iv) оценивают динамическую скорость бурового долота на основании релевантных переменных отклика указанной моды;
v) определяют импульс скорости, способный генерировать колебания с амплитудой, по существу, равной амплитуде указанной оценочной скорости долота; и
vi) инициируют регулируемое без обратной связи изменение скорости посредством добавления указанного импульса скорости к задающей скорость команде оператора, когда амплитуда указанной оценки скорости долота превышает определенный предельный уровень, а противофаза этой оценки скорости долота соответствует фазе генерируемого импульсом колебания.
Следует отметить, что способ согласно настоящему изобретению эффективен при устранении скачкообразных колебаний, но может быть не всегда эффективен для предотвращения повторного появления скачкообразного движения. В некоторых случаях, особенно на скоростях от низкой до умеренной, система может быть неустойчивой, поскольку трение (крутящий момент) слегка падает с повышением скорости. Это означает отрицательное дифференциальное демпфирование, которое может вызывать экспоненциальный рост небольшого колебания до развития полного скачкообразного движения. Поэтому данный способ, предпочтительно, следует использовать в сочетании с демпфирующей системой на основе обратной связи, выступающим, таким образом, как дополнение к существующим способам уменьшения скачкообразного движения. Однако, поскольку задачей систем обратной связи является скорее предотвращение, чем устранение скачкообразных колебаний, может быть значительно снижена плавность или подвижность управления скоростью. Преимущество этого состоит в более высоком допуске на задержку сигнала и снижении риска неустойчивости высокой частоты.
Для упрощения анализа принято, что бурильная колонна может рассматриваться как простой генератор гармонических колебаний. Это означает, что анализ ограничен только до одной моды собственных колебаний. Далее будет обсуждаться обоснованность этого допущения, а способ будет обобщен для большего числа мод. Приведенный ниже анализ ограничивается крутильными колебаниями, однако те же формулы равным образом применимы к осевому движению бурильной колонны.
Уравнением движения крутильного маятника является:

где θ - динамическое угловое перемещение сосредоточенной массы, θtd - движение верхнего привода, J - инерция маятника, S - угловая жесткость пружины. Собственная частота генератора гармонических колебаний определяется как  Путем ввода переменной безразмерного (приведенного) времени τ=ωt уравнение движение может быть упрощено до
Путем ввода переменной безразмерного (приведенного) времени τ=ωt уравнение движение может быть упрощено до

Здесь x обозначает угловое движение, либо угловое перемещение θ, либо угловую скорость dθ/dt, либо угловое ускорение d2θ/dt2, а y обозначает соответствующую переменную для верхнего привода. Общим однородным решением (y≡0) является xh=а⋅cos(ωt-ϕ), где амплитуда и фазовый угол ϕ являются произвольно выбранными константами интегрирования. Это решение представляет недемпфированные гармонические колебания.
Дифференциальное уравнение может быть дважды формально интегрировано для получения формального общего частного решения в качестве интегрального уравнения

где x0 и 
Тривиальным, но физически релевантным частным решением является константа x=y=x0. Это представляет плавное вращение в устойчивом режиме без колебаний. Для удобства в приведенном ниже анализе постоянная составляющая частного решения опущена.
Очевидно, что существует бесконечное число нетривиальных функций y, которые могут устранять начальные колебания xh. Важным подклассом таких функций являются обрабатываемые методом окна функции, которые равны нулю за пределами конечного интервала времени и формально выглядящие как

Здесь f является общей функцией импульса, а является Н так называемой ступенчатой функцией Хевисайда, определяемой как нуль для отрицательных аргументов, 1/2 для нуля и единица для положительных аргументов. Последний фактор представляет окно, которое равно единице для 0<τ<τy и равно нулю за пределами окна. Без потери универсальности здесь было принято, что окно начинается в нулевое время. Легко проверяется, что фаза смещалась, а импульс меняет знак

Также является импульсом решения, если k является целым числом. Эта формула может использоваться для создания новых решений, состоящих из взвешенной суммы начального и смещенного импульсов:

Здесь ak являются амплитудами, приведенными таким образом, что их сумма равна единице. Из общего однородного решения легко проверяется, что  Это может использоваться для генерирования новых, но имеющих другую форму импульсов решения посредством:
Это может использоваться для генерирования новых, но имеющих другую форму импульсов решения посредством:


Верхние индексы здесь определены как комбинация интегрирования/дифференцирования и смещение фазы.
В качестве неисключительного примера рассмотрим следующий основной импульс:

Во-первых, примем, что до начала импульса колебаний нет, что означает, что  Можно видеть, что частное решение при таком импульсе может иметь вид
Можно видеть, что частное решение при таком импульсе может иметь вид

Легко проверяется, что это решение сокращается до cos(τ), когда τ>2π. Поскольку система является линейной, импульс по данному примеру способен устранять или приводить к нулю доимпульсные колебания xh=cos(τ+π)=-cos(τ), которые имеют такую же амплитуду, но противофазу по отношению к генерируемым колебаниям. Различные функции показаны на фиг. 1 для иллюстрации процесса устранения.
Биполярный синусоидальный импульс является только одной из бесконечного числа возможных функций устранения. Другим примером является однополярная функция трапецеидальной формы, показанная штрихпунктирной кривой на фиг. 2. В этом случае решение найдено числовым методом, хотя для этого выбора импульса существуют также аналитические решения. Оба импульса генерируют колебание равной единице амплитуды и нулевой фазы. Нулевая фаза является следствием того факта, что генерируемое колебание имеет пики при кратности 2π, и может быть представлено только содержащим косинус членом без фазового сдвига. Произвольный импульс может иметь другую амплитуду и ненулевую фазу. Несингулярный импульс, который здесь определен как импульс, генерирующий колебание конечной амплитуды, может быть приведен для получения амплитуды колебания, равной единице. Удобно также определять фазу импульса как фазу генерируемого им колебания, приведенную к началу импульса. В двух приведенных выше примерах фазы импульсов равны нулю, что означает, что генерируемое колебание имеет пик в один период после начала импульса.
Два первых примера имеют также общее в том, что они не изменяют среднюю скорость. Возможно также создать обобщенные импульсы, которые изменяют среднюю скорость. Можно спорить о том, что они не являются импульсами в буквальном смысле слова, а представляют, своего рода, сглаженные ступенчатые функции. Тем не менее, при условии, что их производная по времени исчезает за пределами окна, они для удобства называются изменяющими скорость импульсами. Пример такого изменяющего скорость импульса показан на фиг. 3. Здесь скорость увеличивается линейно за полупериод колебания. Это изменение скорости может рассматриваться как квадратный импульс ускорения (на фиг. не показан), создающий изменение скорости в полтора раза при создании колебания с равной единице амплитудой. Следует заметить, что на этот раз генерируемое колебание имеет пик при приведенном времени τ=3π/2. Поэтому фаза по определению равна 3π/2 или - π//2. Поэтому оптимальные моменты времени дл этого импульса по отношению к скорости бурового долота отличны от двух предыдущих.
В целом фаза (несингулярного) импульса может быть однозначно определена как аргумент (фаза) следующей комплексной амплитуды Фурье

Здесь нижний предел интегрирования представляет верхний конец окна импульса.
Четвертый пример, показанный на фиг. 4, представляет собой сингулярный импульс, не создающий колебаний, но создающий единичное изменение скорости. В этом случае выбрано нулевое начальное колебание, демонстрирующее тот факт, что можно изменять скорость без создания колебаний. Наложенная скорость является просто интегралом прямоугольного импульса ускорения, обеспечивающего единичное изменение скорости вращения на временном интервале одного периода колебаний. Поскольку начальное колебание является нулевым, пунктирная кривая скрыта под сплошной кривой.
Эти примеры являются только несколькими из бесконечного числа возможных несингулярных и сингулярных импульсов. Сингулярный импульс может рассматриваться как линейная комбинация двух или большего числа несингулярных импульсов, так что сумма векторов всех амплитуд равна нулю. Специальный класс сингулярных импульсов составляется из произвольного импульса посредством разделения его на сумму половины его исходного импульса и другой половины с задержкой времени на полупериод колебания. То есть

является сингулярным импульсом для любого исходного импульса y. Это может быть выведено из правила сдвига (4), которое подразумевает, что генерируемое колебание второго периода равно колебанию первого периода с изменением знака.
Данная теория описывает способ генерирования управляемых гармонических колебаний, способных устранять известное нежелательное колебание. Однако остается определить амплитуду и фазу этих нежелательных колебаний, поскольку скорость вращения на нижнем конце бурильной колонны не является непосредственно наблюдаемой. Из базового дифференциального уравнения движения (1) ясно, что правый член представляет момент скручивания генератора гармонических колебаний. Перед началом импульса этот член представлен интегралом скорости по времени. Выраженный в приведенных переменных, момент равен интегралу скорости xh или просто xh(τ-π/2). Отсюда можно определить амплитуду и фазу ненаблюдаемой скорости на основании упругого момента генератора колебаний.
Исследуемый генератор гармонических колебаний является простой математической аппроксимацией для бурильной колонны. Как указано авторами Kyllingstad и  в работе «Hardware-ln-the-Loop Simulations Used as a Cost Efficient Tool for Developing an Advanced Stick-Slip Prevention Systems («Аппаратное обеспечение контуров моделирования, используемых в качестве экономичного инструмента для разработки передовых систем предотвращения скачкообразного движения») (SPE 128223, февраль 2010 г.), бурильная колонна описывается более точно как континуум или волновод, обладающий рядом мод собственных колебаний.
в работе «Hardware-ln-the-Loop Simulations Used as a Cost Efficient Tool for Developing an Advanced Stick-Slip Prevention Systems («Аппаратное обеспечение контуров моделирования, используемых в качестве экономичного инструмента для разработки передовых систем предотвращения скачкообразного движения») (SPE 128223, февраль 2010 г.), бурильная колонна описывается более точно как континуум или волновод, обладающий рядом мод собственных колебаний.
В этой работе представлены формулы, действительные для относительно простых бурильных колонн, состоящих из одной однородной секции трубы и сосредоточенной инерции узла на дне скважины. Здесь сделан дальнейший шаг и дан краткий обзор способа, который применим также для более сложной геометрии бурильных колонн.
Допустим, что бурильная колонна состоит из m однородных секций, и что колебательный режим колонны описывается 2m амплитудами волн, представляющих одну распространяющуюся вниз и одну распространяющуюся вверх (одной частоты) волну для каждой секции. Граничные требования непрерывности скорости и крутящего момента дают в результате 2m-2 внутренних граничных условий и 2 конечных условия, которые вместе образуют матричное уравнение 2m×2m. Подробности получения матричного уравнения можно найти в работе авторов Halsey и др. «Drillstring Torsional Vibrations: Comparison between Theory and Experiment on a Full-Scale Research Drilling Rig» («Крутильные колебания бурильной колонны: сравнение теории и эксперимента на полномасштабной исследовательской буровой установке») (SPE 15564, 1989 г.). Формально это матричное уравнение может быть выражено как

Здесь системная матрица Z является комплексной, зависящей от частоты матрицей импедансов, Ω содержит все комплексные амплитуды скорости вращения, а правая сторона является вектором, представляющим внешний ввод крутящего момента. Формальное решение матричного уравнения дает

Полезной функцией отклика является верхний крутящий момент, поделенный на крутящий момент на нижнем конце. Эта безразмерная функция передачи крутящего момента может быть выражена как

где ζ1 является так называемым характеристическим импедансом верхней секции бурильной колонны, а два члена внутри круглых скобок являются амплитудами скорости вращения соответствующих волн, распространяющихся вверх и вниз. Если включено небольшое, но конечное демпфирование, либо в верхнем приводе, либо в пределах длины колонны, указанная выше функция отклика будет функцией с резкими пиками, представляющими собственные резонансные частоты системы. Если пренебречь демпфированием, матрица системы становится сингулярной (с нулевым детерминантом) на собственных частотах.
Другой полезной функцией отклика является динамическая податливость, определяемая как отношение общего угла скручивания к верхнему крутящему моменту. Это может быть математически выражено как

Здесь 
Когда динамическая податливость определена, скорость бурового долота может быть вычислена на основании верхнего крутящего момента. Одним из возможных путей для этого является умножение преобразования Фурье крутящего момента на функцию подвижности iωC и применение к произведению обратного преобразования Фурье. Более практичный способ, который требует меньшей вычислительной мощности, описан авторами Kyllingstad и в указанной выше работе. Согласно их способу выбирается только одна доминирующая частота, обычно - частота скачкообразного движения, и применяются числовое интегрирование и полосовая фильтрация сигнала крутящего момента для получения оценки скорости бурового долота. В способе используется статическая податливость бурильной колонны, откорректированная динамическим коэффициентом sin(kl)/kl.
Третий способ определения динамической скорости долота раскрыт с помощью приведенного ниже алгоритма. В нем принято допущение, что период углового колебания tω=2π/ω и комплексная податливость С на этой частоте являются известными величинами, определенными указанным выше образом.
a) Вычисляют комплексную амплитуду крутящего момента с помощью интеграла Фурье

b) Оценивают соответствующую комплексную амплитуду скорости долота по

Эта функция определяет амплитуду  и фазу
и фазу  оценочной скорости долота.
оценочной скорости долота.
c) Оценивают скорость долота как сумму измеренной скорости верхнего привода и действительной части этой комплексной амплитуды
Вышеуказанные шаги должны быть вычислены для каждого временного шага, а интеграл Фурье должен быть реализован в вычислительном устройстве как разность между накопленным интегралом (от нулевого времени) и запаздывающей по времени величиной этого же интеграла с задержкой на один период колебания. Точность определения скорости долота может быть повышена, особенно во время начального скручивания колонны, если линию линейного тренда, представляющую медленно изменяющийся крутящий момент, вычесть из общего крутящего момента перед интегрированием. Кроме того, можно сгладить мгновенные оценки амплитуды и фазы путем применения низкочастотного фильтра с использованием предыдущих измерений. Во избежание задержки времени определения фазы должно использоваться затраченное время, например, посредством использования следующего рекурсивного фильтра первого порядка:  . Здесь σS,i представляет собой сглаженную оценку фазы, нижний индекс i представляет собой номер последней выборки, Δt обозначает приращение времени, а b является положительным параметром сглаживания, нормально намного меньше единицы. Другой путь сглаживания оценки долота состоит в увеличении интервала обратного интеграла с одного периода колебания до двух или большего числа периодов.
. Здесь σS,i представляет собой сглаженную оценку фазы, нижний индекс i представляет собой номер последней выборки, Δt обозначает приращение времени, а b является положительным параметром сглаживания, нормально намного меньше единицы. Другой путь сглаживания оценки долота состоит в увеличении интервала обратного интеграла с одного периода колебания до двух или большего числа периодов.
Использование комплексного интеграла Фурье на шаге а) предпринято для удобства и снижения до минимума числа уравнений. Он может быть заменен двумя действительными интегральными синусами и косинусами Фурье.
Приведенный выше алгоритм для определения скорости бурового долота является новым и дает значительные преимущества по сравнению со способом определения, описанным в указанной работе авторов Kyllingstad и . Во-первых, он более чувствителен, поскольку определяет амплитуду непосредственно из ограниченного по времени интеграла Фурье и избегает использования медленных полосовых фильтров более высокого порядка. Во-вторых, способ более эффективно подавляет более высокие гармонические составляющие. И наконец, он использует теоретическую податливость колонны, которая более точна, особенно для сложных колонн из многих секций.
Показано, что бурильная колонна отличается от генератора гармонических колебаний вследствие значительного отношения длины колонны к длине волны. Другое отличие состоит в трении между колонной и скважиной и в крутящем моменте бурового долота. Как трение скважины, так и крутящий момент долота являются в высокой степени нелинейными процессами, которые, по существу, представляют собой приводные механизмы скачкообразных колебаний. Во время фазы остановки нижний конец бурильной колонны более или менее неподвижен, то есть, он имеет нулевую скорость вращения и не зависит от крутящего момента. В отличие от этого крутящий момент долота и трение скважины приблизительно постоянны и поэтому динамически представляют свободный нижний конец во время фазы скачка. Теория прогнозирует, а наблюдения подтвердили, что самый нижний период скачка и остановки слегка длиннее самой нижней собственной моды совершенно свободного нижнего конца. Вследствие этого период увеличивается, когда снижается средняя скорость и снижается продолжительность фазы остановки. Для чистых периодических скачкообразных колебаний скорость долота и верхний крутящий момент могут характеризоваться рядом гармонических частот Фурье, которые являются частотами, целыми кратными периоду обратного скачкообразного движения. Эти частоты не следует путать с собственными частотами, которые по определению являются собственными частотами неподвижной и свободной бурильной колонны при отсутствии линейного трения или при низком линейном трении. Более высокая средняя скорость стремится укоротить фазу движения и уменьшает относительную величину более высоких гармоник. Для скоростей выше определенной критической скорости вращения фаза остановки исчезает, и колебания преобразуются в свободные демпфированные колебания самых нижних собственных мод. Эта критическая скорость имеет тенденцию повышаться при росте длины бурильной колонны и увеличении трения и может достигать недостижимого уровня даже для умеренных длин колонны.
Для проверки того, может ли описанный выше способ, поученный для простого генератора гармонических колебаний, быть применимым для устранения крутильных скачкообразных колебаний в бурильной колонне, используется усовершенствованная математическая модель для как можно более реалистичного моделирования бурильной колонны. Подробное описание модели приведено в указанной работе авторов Kyllingstad и 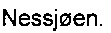 . Результаты моделирования, подробно раскрытые в следующем разделе, подтверждают, что способ, описанный для простого генератора гармонических колебаний, применим также для длинных бурильных колонн.
. Результаты моделирования, подробно раскрытые в следующем разделе, подтверждают, что способ, описанный для простого генератора гармонических колебаний, применим также для длинных бурильных колонн.
Один из приведенных ниже результатов моделирования также показывает, что способ не ограничивается устранением в одно и то же время только одной моды колебаний, но может использоваться для одновременного устранения обеих, первой и второй мод крутильных колебаний. Не включенные сюда результаты моделирования показывают, что способ также применим для устранения осевых скачкообразных колебаний в колонне. Равным образом способ пригоден для использования на наземных и морских буровых установках, где буровой двигатель имеет электрическое или гидравлическое питание.
Далее, способ может содержать определение периода указанной моды теоретически на основании геометрии бурильной колонны путем решения системы уравнений граничных условий для ряда возможных частот колебаний и нахождения пика в соответствующем спектре отклика.
Далее, способ может содержать определение оценки указанной скорости долота посредством следующих шагов:
a) нахождение динамической податливости колонны путем применения формулы (15) для определенной частоты моды;
b) нахождение изменения динамического отклика путем вычитания средней величины или более общей линии тренда из исходного сигнала отклика;
c) нахождение комплексной амплитуды этого динамического отклика путем вычисления интеграла Фурье по целому числу периодов с отставанием по времени;
d) определение комплексной амплитуды динамической скорости долота путем умножения указанной комплексной амплитуды отклика на вычисленную динамическую податливость и на произведение отрицательной мнимой единицы и угловой частоты указанной моды; и
e) нахождение действительной скорости, амплитуды и фазы указанной комплексной амплитуды скорости долота как, соответственно, действительной части, модуля и аргумента этой комплексной амплитуды.
Способ в соответствии с настоящим изобретением преодолевает недостатки современных систем демпфирования скачкообразного движения и других видов интеллектуального управления верхним приводом. Способ обеспечивает возможность устранять или значительно уменьшать скачкообразные колебания в широком спектре условий. В отличие от прежних систем, все из которых представляют непрерывное регулирование с обратной связью скорости верхнего привода в ответ на мгновенную нагрузку крутящего момента, предлагаемый способ использует изменение регулируемой без обратной связи скорости, которое устраняет или значительно уменьшает нежелательные колебания за короткий период времени.
Краткое описание чертежей, относящихся к специальной части
Далее будет описан предпочтительный пример осуществления способа со ссылками на приложенные чертежи, на которых:
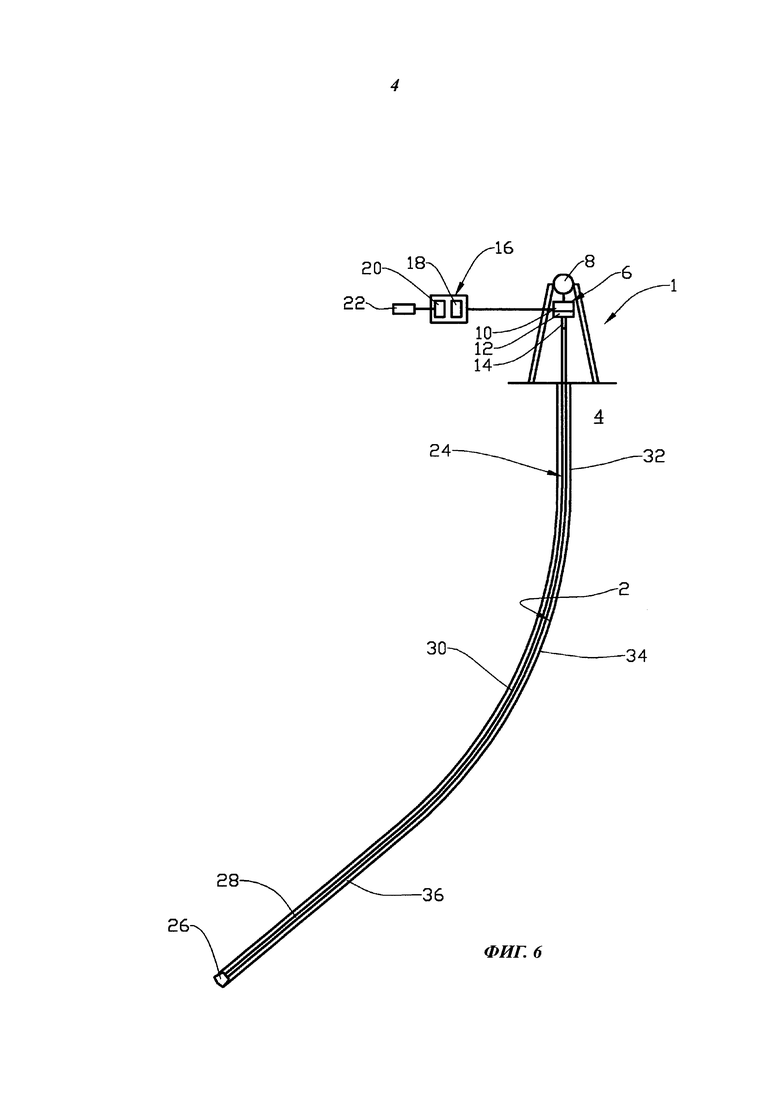
на фиг. 6 схематично изображена буровая установка и бурильная колонна, которой управляют в соответствии с изобретением;
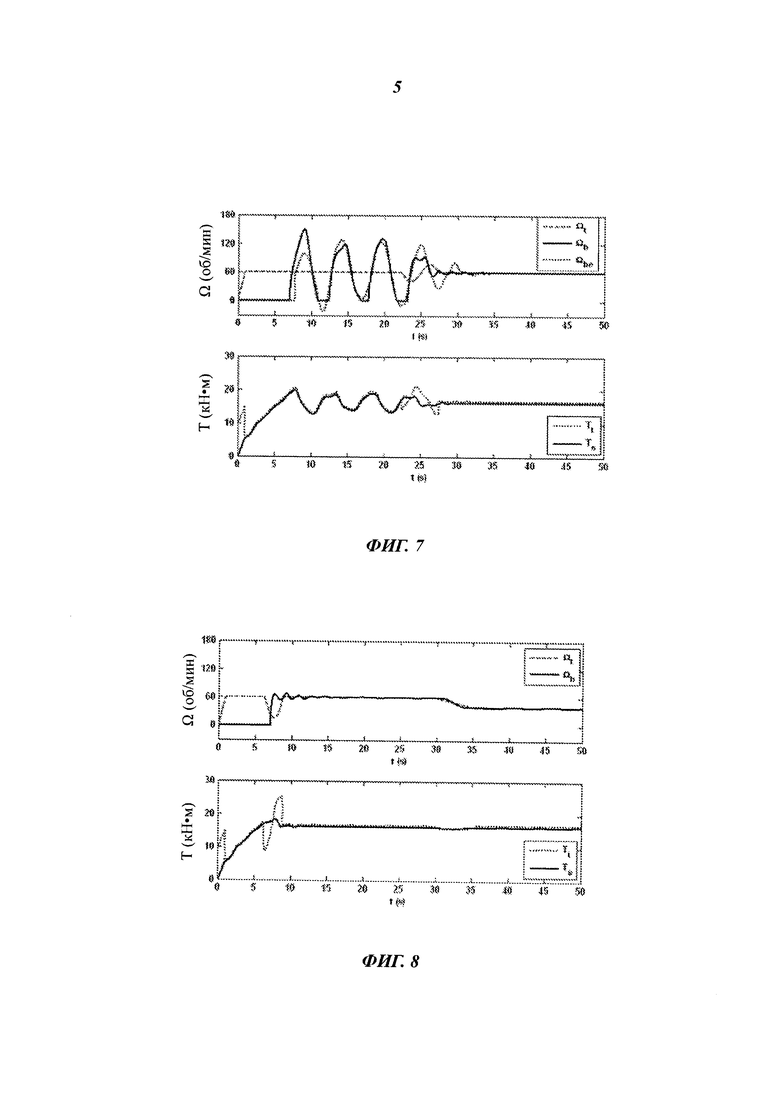
на фиг. 7 изображен график, полученный при моделировании устранения крутильных скачкообразных колебаний в бурильной колонне длиной 3200 м, где абсцисса представляет время моделирования в секундах, ордината верхнего подграфика представляет скорость моделирования, а ордината нижнего подграфика представляет крутящий момент;
на фиг. 8 изображен график, полученный при моделировании устранения крутильных скачкообразных колебаний в бурильной колонне длиной 7500 м, где абсцисса представляет время моделирования в секундах, ордината верхнего подграфика представляет скорость моделирования, а ордината нижнего подграфика представляет крутящий момент; и
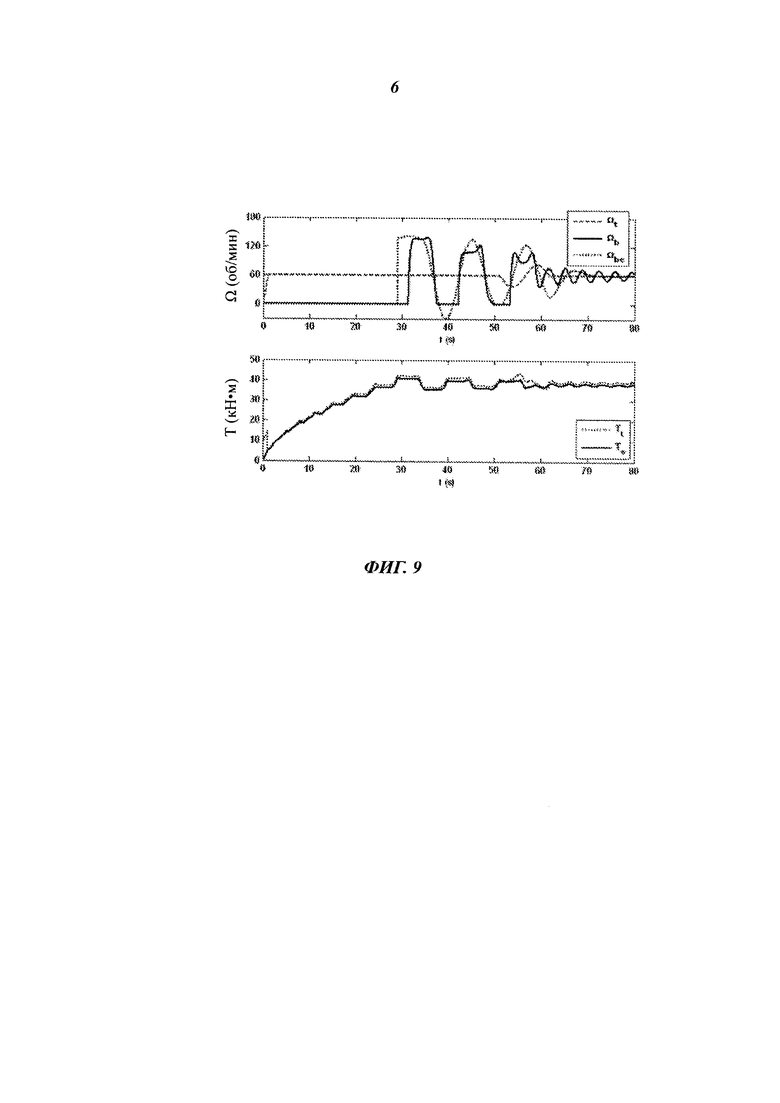
на фиг. 9 изображен график, полученный при моделировании устранения крутильных скачкообразных колебаний и второй моды колебаний в бурильной колонне длиной 7500 м, где абсцисса представляет время моделирования в секундах, ордината верхнего подграфика представляет скорость моделирования, а ордината нижнего подграфика представляет крутящий момент.
Подробное раскрытие изобретения
На чертежах позицией 1 обозначена буровая установка, от которой производится бурение буровой скважины 2 в грунте 4. Буровая установка 1 содержит вращающий механизм 6 в виде верхнего привода, который может перемещаться в вертикальном направлении с помощью подъемного механизма 8 в виде буровой лебедки.
Верхний привод 6 содержит электродвигатель 10, передаточный механизм 12 и выходной вал 14. Двигатель 10 соединен с приводом 16, который включает в себя силовые контуры 18, управляемые регулятором 20 скорости. Задаваемой скоростью и параметрами регулятора скорости управляют программируемым логическим контроллером PLC (от англ. Programmable Logic Controller) 22, который также может входить в состав привода 16.
Бурильная колонна 24 соединена с выходным валом 14 верхнего привода 6 и имеет буровое долото 26. В этом частном примере осуществления бурильная колонна 24 состоит из тяжелой бурильной трубы 28 в нижней части и нормальной бурильной трубы 30 в остальной части бурильной колонны 24. Буровое долото 26 работает на дне скважины, которая имеет верхний вертикальный участок 32, криволинейный, так называемый, восходящий участок 34 и наклонный участок 36. Следует заметить, что фиг. 1 выполнена не в масштабе.
Моделирование, содержащее программу моделирования, упомянутую в общей части описания, показало, что способы устранения колебаний в генераторе гармонических колебаний применимы также для устранения скачкообразных колебаний в бурильной колонне 24. Выбранным для опыта объектом является бурильная колонна 24 длиной 3200 м, помещенная в значительно отклоняющейся от вертикали скважине 2. Траектория скважины может быть описана тремя участками. Первый участок вертикален до 300 м от верха, второй участок является криволинейным (так называемый, восходящий участок) и проходит от 300 до 1500 м, и третий участок является прямым и проходит под углом 75° до конца бурильной колонны 24.
Моделирование было выполнено со стандартным регулятором 20 скорости для верхнего привода 6. Для улучшения отклика на быстрые изменения заданной скорости к членам PI добавляют член ускорения на входе. Таким образом, в линейном режиме, когда не используются пределы функциональных способностей, крутящий момент верхнего привода может быть выражен как

Здесь Ωset - заданная скорость, Ωd - скорость вращения верхнего привода 6, Р - коэффициент пропорциональности, I - коэффициент интеграла, a Jd - оценочная механическая инерция верхнего привода 6, отнесенная к выходному валу 14. Динамическая часть Ωd представляет собой масштабированный вариант обычной скорости у верхнего привода 6, используемый в вышеприведенной теории. В модели колонны крутящий момент Ts берут непосредственно для модели (как если бы наверху колонны был соответствующий датчик крутящего момента). (Если непосредственные измерения невозможны, то крутящий момент колонны может быть получен из создаваемого двигателем крутящего момента верхнего привода с поправкой на потери в передаточном механизме и инерцию:  где η - КПД передаточного механизма.)
где η - КПД передаточного механизма.)
Результаты моделирования показаны на фиг. 7. Верхний подграфик показывает моделируемые значения скорости Ωd верхнего привода 6, скорости Ωb долота 26, а также оценочной скорости Ωbe долота как функции времени t. Нижний подграфик показывает крутящий момент Td от двигателя 10 и верхний крутящий момент Td бурильной колонны 24 за тот же период времени в 50 с. Разница между двумя кривыми крутящего момента вызвана инерцией и потерями в передаточном механизме. Оценочная скорость Ωbe долота найдена как сумма скорости верхнего привода и динамической скорости, найденной из верхнего крутящего момента колонны с использованием нового алгоритма оценки, раскрытого выше в общей части. Дополнительное логическое устройство удерживает скорость равной нулю во время начального скручивания, пока верхний крутящий момент не достигнет своего первого максимума. Моделирование проведено с бурильной колонной 24, состоящей (от нижнего конца вверх) из долота 26, колонны 28 длиной 200 м из пятидюймовых тяжелых (толстостенных) бурильных труб и колонны 30 длиной 3000 м из обычных пятидюймовых бурильных труб. Раскрытый в общей части линейный способ применительно к этой конкретной колонне прогнозирует динамическую податливость величиной 2,14 рад/(кН⋅м) при самом нижнем резонансе с периодом 5,16 с. По сравнению с этим моделируемый период скачкообразного движения при средней скорости вращения в 60 об/мин составляет приблизительно 5,36 с. Эта разница согласуется с тем фактом, что продолжительность фазы остановки составляет около 1,5 с или 27% полного периода скачкообразного движения. Оптимальная амплитуда выбранного биполярного синусоидального импульса (имеющего период 5,16 с) должна быть 17,2 об/мин. Эта амплитуда ниже, но имеет тот же порядок, что и амплитуда оцененной скорости долота, деленная на π: 69,8 об/мин / π=22,2 об/мин. Оптимальным стартовым временем для импульса является 22,42 с, что на 0,17 с отстает от последнего минимума оценочной скорости долота. Эта задержка времени представляет запаздывание по фазе в 12° по отношению к прогнозу простой гармонической теории. Несмотря на эти относительно небольшие расхождения результаты моделирования подтверждают, что способ, полученный для простого генератора гармонических колебаний, применим также для бурильной колонны, которая является намного более сложной динамической системой. Довольно хорошее совпадение между моделируемой скоростью вращения Ωb долота и оценочной скоростью Ωbe, полученной на основании крутящего момента также служит подтверждением достоверности нового способа оценки. Тот факт, что оценочная скорость иногда опускается ниже нулевой, не является неожиданным с учетом того, что скачкообразное движение не является чисто периодическим и имеет значительные временные интервалы остановки. Обратное вращение не поддерживается моделированием, так что визуализация оценочной скорости долота должна включать в себя ограничительный фильтр, который снимает отрицательные скорости.
Для практических целей оптимальный выбор подходящего момента времени и амплитуды устраняющего импульса вычисляют с помощью PLC 22, который программируют для выполнения таких вычислений на основании измерений, как это объяснялось выше. Величины сигналов для формирования правильного импульса в силовых контурах для двигателя 10 передают на регулятор 28 скорости.
В другом примере, показанном на фиг. 8, устраняющий импульс инициируют перед тем, как долото начнет вращаться, а крутящий момент достигнет своего первого максимума. При правильном согласовании во времени этого импульса скачкообразное движение предотвращается перед его началом. В этом случае используется отрицательный односторонний импульс, поскольку этот импульс почти полностью снимает перехлест скорости долота. В отличие от предыдущего примера здесь нет колебаний крутящего момента, которые могут давать удовлетворительную оценку скорости долота, поэтому она не приведена на графике. Однако, если перед началом вращения известны средний крутящий момент и период колебаний, то можно использовать пересечение этого среднего крутящего момента в качестве события для инициирования импульса. На фиг. 8 показан также пример изменения скорости управляемым образом без остаточных колебаний после регулирования. В этом частном примере скорость снижается с 60 до 40 об/мин по линейному закону изменения скорости. Видно, что это изменение скорости, которое имеет место за один период времени (5,16 с), является успешным, поскольку не создает новых колебаний. Более внимательное рассмотрение результатов моделирования показывает, что остаются небольшие остаточные колебания амплитудой примерно 0,8 об/мин, и она имеет тенденцию слегка возрастать к концу моделирования. Это является показателем того, что плавное вращение с низкой скоростью неустойчиво и что необходима активная система демпфирования для предотвращения развития полных скачкообразных колебаний.
Приведенные примеры являются убедительным доказательством того, что теория устранения колебаний в простом генераторе колебаний довольно хорошо подходит для бурильной колонны 24, по меньшей мере, когда бурильная колонна 24 не имеет чрезвычайно большой длины. Моделирование для бурильной колонны 24 длиной 7500 м показывает, что способ устраняющего импульса применим также к чрезвычайно длинным бурильным колоннам 24, которые представляют наиболее трудные случаи предотвращения скачкообразного движения. На фиг. 9 показаны результаты моделирования при применении устраняющего колебания импульса в бурильной колонне 24 длиной 7500 м с большим отклонением под углом 80°, начиная от высоты 1500 м от дна скважины. Теоретический период крутильного маятника колонны составляет 10,56 с, опять чуть ниже, чем наблюдаемый период скачкообразного движения в 10,8 с. Динамическая податливость на этой частоте составляет 4,94 рад/(кН⋅м). Эта величина используется для вычисления скорости Ωbe долота. Амплитуда этой оценки немного изменяется по времени и составляет примерно 63 об/мин в момент времени 50,5 с, когда противофаза является нулевой. Эти величины довольно хорошо согласуются с оптимальной амплитудой и временем импульса, равными соответственно 22,9 об/мин (=71,9 об/мин/π) и 51,1 с. Не включенные сюда результаты моделирования, заменяющие оптимальные величины величинами амплитуды и фазы из оценки скорости долота, показывают, что особенно рассогласование времени в 0,5 с (17°) достаточно велико, чтобы сделать импульсный способ неспособным устранять скачкообразное движение за исключением очень короткого периода времени. Это строгое требование почти совершенной амплитуды и момента времени устраняющего импульса разочаровывает, но не является полностью неожиданным. Низкая скорость вращения в 60 об/мин находится далеко ниже предела собственной устойчивости такой длинной колонны. Дополнительное моделирование (здесь не показано) с этой же длинной колонной, но с более высокими скоростями и/или с включением активной системы демпфирования показывают, что импульсный способ устранения работает, при этом с более широким допуском ошибок на несовершенную амплитуду и момент времени устраняющего импульса.
Комментарий к последним результатам моделирования на фиг. 9. Ясно, что некоторые остаточные колебания остаются после устранения скачкообразного движения. Эти колебания идентифицируются как колебания второй моды, поскольку период очень близок к периоду теоретической второй моды, равному 3,52 с. Однако в данном случае имеется достаточное демпфирование для гашения этих колебаний. Моделирование показало, что эти колебания могут быть устранены одновременно путем добавления компоненты импульса оптимальной амплитуды и фазы к первому импульсу, предназначенному для устранения только самой нижней моды колебаний.
Способ устранения крутильных скачкообразных колебаний может быть резюмирован в виде следующего алгоритма:
i. Определяют период колебаний и соответствующую угловую частоту либо теоретически, на основании описания геометрии бурильной колонны 24, либо эмпирически, на основании наблюдаемых изменений крутящего момента или скорости вращения.
ii. Непрерывно измеряют скорость и крутящий момент вверху бурильной колонны 24. Последний можно измерять либо непосредственно с помощью предназначенного для этого датчика крутящего момента (не показан) между верхним приводом 6 и бурильной колонной 24, либо опосредованно на основании крутящего момента двигателя 10, с поправкой на потери в передаточном механизме и инерцию.
iii. Оценивают амплитуду скорости долота и фазу на основании измеренного крутящего момента с помощью одного из алгоритмов, приведенных в общей части описания.
iv. Выбирают форму устраняющего импульса и масштабируют его, чтобы амплитуда генерируемого колебания соответствовала амплитуде оценочной скорости долота.
v. Если амплитуда скорости долота превышает определенный уровень, например, 50% средней скорости, то приводят в готовность пусковую схему и ожидают оптимального времени для инициирования устраняющего импульса.
vi. Инициируют масштабированную устраняющую амплитуду в качестве дополнения к постоянной задаваемой скорости, когда фаза оценочной амплитуды скорости долота соответствует или превышает противофазу генерируемого импульсом колебания на определенный фазовый сдвиг.
Более простой алгоритм может использоваться, когда целью является постоянное изменение скорости без создания новых колебаний.
i. Выбирают сингулярный изменяющий скорость импульс ускорения, являющийся линейной комбинацией несингулярных импульсов, таким образом, что их векторная сумма генерируемых колебаний равна нулю.
ii. Инициируют импульс каждый раз, когда необходимо изменить скорость.
Изобретение относится к способу и системе уменьшения колебаний буровой колонны. Техническим результатом является устранение или значительное снижение скачкообразных колебаний в бурильной колонне. Способ и система для уменьшения или предотвращения, по меньшей мере, осевых или крутильных колебаний в бурильной колонне с буровым долотом, присоединенным к ее нижнему концу, и управляемой подъемным механизмом и вращающим механизмом, присоединенными к ее верхнему концу, при этом регулируемыми переменными являются вертикальная скорость и скорость вращения, а переменными отклика являются сила осевого натяжения и крутящий момент, отнесенные к верху бурильной колонны, причем данный способ содержит следующие шаги: i) выбирают по меньшей мере одну подлежащую регулированию колебательную моду бурильной колонны; ii) выполняют мониторинг регулируемой переменной и переменной отклика, релевантных для указанной колебательной моды; iii) определяют период колебаний указанной моды; iv) оценивают динамическую скорость бурового долота на основании релевантных переменных отклика указанной моды; v) определяют импульс скорости, способный генерировать колебания с амплитудой, по существу равной амплитуде указанной оценочной скорости долота; и vi) инициируют регулируемое без обратной связи изменение скорости посредством добавления указанного импульса скорости к задающей скорость команде оператора, когда амплитуда указанной оценки скорости долота превышает определенный пороговый уровень, а противофаза указанной оценки скорости долота соответствует фазе генерируемого импульсом колебания. 2 н. и 5 з.п. ф-лы, 9 ил.
1. Способ уменьшения или предотвращения, по меньшей мере, осевых или крутильных колебаний в бурильной колонне (24) с буровым долотом (26), присоединенным к ее нижнему концу, и управляемой подъемным механизмом (8) и вращающим механизмом (6), присоединенными к ее верхнему концу, причем регулируемыми переменными являются вертикальная скорость и скорость вращения, а переменными отклика являются сила осевого натяжения и крутящий момент, отнесенные к верху бурильной колонны (24), отличающийся тем, что способ содержит следующие шаги:
i) выбирают по меньшей мере одну подлежащую регулированию колебательную моду бурильной колонны;
ii) выполняют мониторинг регулируемой переменной и переменной отклика, релевантных для указанной колебательной моды;
iii) определяют период колебаний указанной моды;
iv) оценивают динамическую скорость бурового долота на основании релевантных переменных отклика указанной моды;
v) определяют импульс скорости, определяемый как ограниченное по времени изменение скорости на поверхности, способный генерировать колебания с амплитудой, по существу, равной амплитуде указанной оценочной скорости долота; и
vi) инициируют регулируемое без обратной связи изменение скорости посредством добавления указанного импульса скорости к задающей скорость команде оператора, когда амплитуда указанной оценки скорости долота превышает определенный пороговый уровень, а противофаза указанной оценки скорости долота соответствует фазе генерируемого импульсом колебания.
2. Способ по п. 1, в котором период указанной моды определяют теоретически на основании геометрии бурильной колонны путем решения системы уравнений граничных условий для ряда возможных частот колебаний и нахождения пика в соответствующем спектре отклика.
3. Способ по п. 1, в котором оценку указанной скорости долота определяют посредством выполнения следующих шагов:
a) находят динамическую податливость колонны путем применения формулы (16) для определенной частоты моды;
b) находят комплексную амплитуду указанной переменной отклика путем вычисления интеграла Фурье указанной переменной по целому числу периодов с отставанием по времени;
c) определяют комплексную амплитуду указанной динамической скорости долота путем умножения указанной комплексной амплитуды отклика на вычисленную динамическую податливость и на произведение отрицательного значения мнимой единицы и угловой частоты указанной моды;
d) находят амплитуду и фазу указанной динамической скорости долота как, соответственно, модуль и аргумент указанной комплексной амплитуды; и
е) находят оценку скорости долота как сумму действительной части указанной комплексной амплитуды, скорости долота и измеренной регулируемой переменной.
4. Система для уменьшения или предотвращения, по меньшей мере, осевых или крутильных колебаний в бурильной колонне (24), отличающаяся тем, что содержит:
привод (16), выполненный с возможностью:
i) выбора по меньшей мере одной подлежащей регулированию колебательной моды бурильной колонны,;
ii) мониторинга регулируемой переменной и переменной отклика, релевантных для указанной колебательной моды, причем регулируемыми переменными являются вертикальная скорость и скорость вращения, а переменными отклика являются сила осевого натяжения и крутящий момент;
iii) определения периода колебаний указанной моды;
iv) оценки динамической скорости бурового долота на основании релевантных переменных отклика указанной моды;
v) определение импульса скорости, определяемого как ограниченное по времени изменение скорости на поверхности, способного генерировать колебания с амплитудой, по существу, равной амплитуде указанной оценочной скорости бурового долота; и
vi) инициирования регулируемого без обратной связи изменения скорости посредством добавления указанного импульса скорости к задающей скорость команде оператора, когда амплитуда указанной оценки скорости долота превышает определенный пороговый уровень, а противофаза указанной оценки скорости долота соответствует фазе генерируемого импульсом колебания.
5. Система по п. 4, дополнительно содержащая:
вращающий механизм (6), присоединенный между приводом (16) и бурильной колонной (24), причем вращающий механизм (6) выполнен с возможностью вращения бурильной колонны (24) в скважине (2) в ответ на сигнал от привода (16).
6. Система по п. 5, в которой вращающий механизм (6) является верхним приводом.
7. Система по п. 4, в которой привод (16) содержит программируемый контроллер (22), который управляет задаваемой скоростью и параметрами регулятора скорости.
| WO 2010063982 A1, 10.06.2010 | |||
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРОПРИВОДА РЕГУЛЯТОРА ПОДАЧИ ДОЛОТА | 1996 |
|
RU2108456C1 |
| WO 2011017627 A1, 10.02.2011 | |||
| МЕХАНОХИМИЧЕСКИЙ СПОСОБ ИЗМЕЛЬЧЕНИЯ АЛМАЗОВ | 2009 |
|
RU2415717C1 |
| СЕТКА ДЛЯ НОШЕНИЯ РЕБЕНКА | 1926 |
|
SU5610A1 |

