ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение в целом относится к бурению скважин в породной формации. В частности, настоящее изобретение относится к способу и устройству для оценки по меньшей мере одного из скорости вращения на забое скважины и крутящего момента на забое скважины вдоль бурильной колонны и бурового долота скважинного бурового оборудования, в частности при бурении скважины в породной формации, а также к скважинному оборудованию, в котором использованы указанные способ и/или устройство, и к компьютерному программному продукту для осуществления указанного способа с помощью компьютера или компьютерной системы.
УРОВЕНЬ ТЕХНИКИ
Термин «скважина» обычно означает результат бурения в породе в вертикальном направлении, горизонтальном направлении и/или наклонном направлении с помощью бурильной колонны, на нижнем конце которой находится буровое долото. Бурильную колонну приводят в движение с ее верхнего конца посредством приводной системы, находящейся на поверхности земли или поверхности моря и называемой верхним приводом или роторным столом. Верхний привод или роторный стол приводят в действие посредством электродвигателя или приводного двигателя любого другого типа, что обеспечивает вращательное движение бурового долота в скважине.
Бурильная колонна обычно представляет собой конструкцию из множества трубчатых элементов или труб, соединенных друг с другом посредством резьбового соединения. Обычная бурильная колонна может иметь длину несколько сотен или тысяч метров.
Нижняя часть бурильной колонны называется компоновкой низа бурильной колонны, с которой соединен режущий инструмент для бурения скважины, также называемый буровым долотом.
Бурильная колонна выполнена полой, так что буровой раствор может быть подан вниз к компоновке низа бурильной колонны через сопла в долоте с целью ее смазки. Буровой раствор циркулирует обратно вверх по кольцевому пространству, т.е. пространству между внешней периферией бурильной колонны и стенкой скважины, для транспортировки шлама от бурового долота к поверхности земли.
Скважина может быть пробурена в различных целях, в том числе для добычи воды или другой жидкости (такой как нефть) или газов (таких как природный газ и сланцевый газ), в рамках инженерно-геологических изысканий, для использования геотермальной энергии, проведения экологической экспертизы участка, разведки полезных ископаемых, измерения температуры или в качестве предварительной скважины для установки, например, опор или подземных коммуникаций.
Компоновка низа бурильной колонны является жесткой в направлении кручения, поскольку она выполнена относительно короткой и толстостенной. При использовании компоновка низа бурильной колонны испытывает боковые отклонения вследствие воздействия сжимающего усилия. Бурильная колонна представляет собой узкую и гибкую конструкцию благодаря ее большой длине и относительно небольшой толщине стенок. При бурении возникают вибрации в скважинном оборудовании, в частности в бурильной колонне. В бурильной колонне для вращательного бурения и компоновке низа бурильной колонны могут возникать крутильные, осевые или продольные и поперечные вибрации.
Осевые вибрации могут обычно вызвать отскок долота, что может повредить резцы и подшипники бурового долота. Поперечные вибрации могут быть очень разрушительными и могут создавать сильные удары при воздействии компоновки низа бурильной колонны на стенку скважины. Поперечные вибрации могут приводить систему в режим обратной прецессии с созданием высокочастотных колебаний изгибающего момента большой амплитуды, что приводит к высоким показателям усталости компонентов и соединений. Дисбаланс в компоновке может привести к изгибанию бурильной колонны, вызванному центробежными силами, что может создать прямую прецессию и привести к одностороннему износу компонентов. Крутильные колебания являются результатом, среди прочего, колебаний бурильной колонны вдоль ствола скважины и могут возникать вследствие прихватывания-проскальзывания. Нарушения в работе бурильной колонны могут уменьшить передачу энергии между поверхностью и долотом, увеличить усталость металла, ускорить преждевременный износ долота, уменьшить скорость проходки, а также могут привести к повреждению скважины.
Прихватывание-проскальзывание представляет собой явление, вызванное силами трения между поверхностями бурового долота и/или бурильной колонны, контактирующими с поверхностью породной формации или поверхностью внутренней стенки ствола скважины. Поверхности бурового долота и/или бурильной колонны с одной стороны и поверхности породной формации и ствола скважины с другой стороны могут попеременно прихватывать друг друга или скользить друг по другу с соответствующим изменением силы трения.
На практике эта сила трения демонстрирует нелинейную зависимость, при этом в большинстве случаев трение может стать настолько большим, что буровое долото, т.е. компоновка низа бурильной колонны, полностью остановится на некоторое время, что называется режимом прихватывания. В режиме прихватывания сохранение скорости вращения привода или движение приводной системы скручивает бурильную колонну. Если крутящий момент, созданной в бурильной колонне, является достаточно большим для того, чтобы преодолеть трение покоя, компоновка низа бурильной колонны снова начинает вращаться, что называется режимом проскальзывания. Однако это может привести к внезапному скачку или скачкообразному увеличению углового ускорения движения бурового долота, в том числе вследствие того, что динамическое трение, с которым сталкивается бурильная колонна и компоновка низа бурильной колонны, меньше трения покоя, и может привести к его чрезмерному износу. Режимы прихватывания и проскальзывания могут довольно быстро сменять друг друга в регулярной периодической манере. При бурении с прихватыванием-проскальзыванием скорость проходки низкая, и долото изнашивается быстрее.
Вышеописанные явления так или иначе негативно влияют на производительность процесса бурения, так что запланированная операция бурения может быть выполнена с опозданием на несколько дней, например при возникновении прихватывания-проскальзывания, с риском взимания штрафных санкций и тому подобного.
Для смягчения последствий воздействия крутильных вибраций и резонанса в бурильной колонне, а также возникновения и воздействия прихватывания-проскальзывания и колебаний, скоростью вращения и крутящим моментом, прикладываемым приводной системой скважинного оборудования, управляют, среди прочего, посредством регулятора скорости, параметры которого устанавливают и настраивают на соответствующие рабочие параметры этого скважинного оборудования. Термин «смягчение последствий» следует толковать как включающий в себя управление, ослабление, снижение, смягчение, выравнивание, облегчение и тому подобные значения, вплоть до предотвращения крутильных вибраций и колебаний при прихватывании-проскальзывании.
Рабочие параметры скважинного оборудования зависят от механических свойств верхнего привода или поверхностного привода, компоновки низа бурильной колонны и геометрии колонны, т.е. удельной массы и модуля сдвига материала трубы, вязкостного демпфирования стенки скважины и т.д.
По мере продолжения бурения геометрия колонны и механические свойства трубчатых элементов бурильной колонны изменяются вследствие удлинения этой бурильной колонны и/или изменений в компоновке низа бурильной колонны. Следует учитывать, что каждый раз при удлинении бурильной колонны, например на свечу, содержащую несколько звеньев бурильной трубы, происходит изменение динамики скважинного оборудования. На практике это может потребовать перенастройки параметров регулятора скорости, например примерно через каждые 100-200 м бурения.
При бурении трение, испытываемое бурильной колонной, например, за счет механического контакта бурильной колонны с внутренней стенкой ствола скважины, также может изменяться в процессе работы вследствие изменений в составе материала породной формации, в которой бурят скважину, или вследствие отклонения ствола скважины, например, из вертикального положения в горизонтальное положение или в положение между этими двумя крайними положениями.
На практике геометрические параметры колонны или динамические характеристики бурильной колонны могут быть заданы бурильщиком вручную путем ввода посредством клавиатуры интерфейса ввода/вывода регулятора скорости, например, значений внутреннего и внешнего диаметров и длины трубчатых элементов или труб бурильной колонны и утяжеленных бурильных труб компоновки низа бурильной колонны, на которую опирается буровое долото, взятых из сравнительной таблицы технических характеристик или тому подобного. Следует отметить, что вместо ввода механических характеристик самого скважинного оборудования можно вводить из сравнительной таблицы технических характеристик или другой подобной таблицы значения параметров регулятора скорости, уже рассчитанные на основании геометрии конкретной используемой бурильной колонны.
В альтернативном варианте, например, параметры геометрии колонны могут быть получены без вмешательства оператора или другого специалиста с использованием способа и устройства, раскрытых в международной патентной заявке WO 2014/098598, поданной настоящим заявителем. С помощью этого способа и устройства при начале бурения может быть выведена полностью автоматически и автономно соответствующая репрезентативная динамическая модель скважинного оборудования, в частности бурильной колонны и компоновки низа бурильной колонны.
Несмотря на то, что информация о механических характеристиках бурового долота или компоновки низа бурильной колонны и бурильной колонны при бурении крайне важна бурильщику для оптимизации процесса бурения, получение этой информации в реальном времени или в масштабе времени, близком к реальному времени, является большой проблемой, которая следует решить, поскольку эти части скважинного оборудования являются глубинными, т.е. забойными, и не видны или труднодоступны для выполнения измерений.
Термин «забойный», используемый в настоящем описании и прилагаемой формуле изобретения, обычно относится к любому положению в пробуренной скважине, при этом не следует считать, что он ограничен нижним концом скважины.
На практике данные измерений в реальном времени или масштабе времени, близком к реальному времени, для забойного скважинного оборудования в процессе бурения, которые также известны как измерения в процессе бурения, собирают посредством измерительных устройств, расположенных в компоновке низа бурильной колонны, например электромеханическими датчиками направления, различными тензометрами, датчиками температуры и акселерометрами, которые измеряют осевые, крутильные и поперечные ускорения, натяжение, крутящий момент, температуру и скорость вращения компоновки низа бурильной колонны. Телеметрия по гидроимпульсному каналу связи является стандартным способом в коммерческих системах измерения в процессе бурения и системах каротажа в процессе бурения, для обмена скважинными данными с обрабатывающим оборудованием, находящимся на поверхности земли, где данные могут быть обработаны и графически отображены, например, на экране компьютера в кабине на буровой установке.
Измерительные устройства в системы измерения в процессе бурения и системы каротажа в процессе бурения в компоновке низа бурильной колонны должны быть очень прочными, поскольку все они должны оставаться надежными в жестких условиях эксплуатации, поскольку компоновка низа бурильной колонны в процессе использования подвергается воздействию больших сил, вызывающих подпрыгивание и вибрацию, что делает этот тип оборудования довольно дорогим. Современные инструменты системы измерения в процессе бурения обычно выполнены с возможностью выдерживания ударов приблизительно 500 Г в течение 0,5 мс в течение срока службы 100000 циклов. Крутильный удар, вызванный крутильными ускорениями при прихватывании и/или проскальзывании, также может быть значительным. Можно ожидать, что инструменты, подвергаемые многократному прихватыванию и/или проскальзыванию, выйдут из строя.
Кроме того, системы измерения в процессе бурения обычно содержат источник питания, такой как батарея и турбина, приводимая в действие буровым раствором. Комбинацию этих двух типов силовых систем используют для подачи энергии питания на инструмент для измерения в процессе бурения с тем, чтобы избежать, например, перебоев питания в условиях прерывистого потока бурового раствора. Батареи могут обеспечивать эту энергию питания независимо от циркуляции бурового раствора, однако они имеют ограниченный срок службы.
В системах измерения в процессе бурения обычно используют литий-тионилхлоридные батареи благодаря их отличному сочетанию высокой плотности энергии и превосходных характеристик при рабочих температурах измерения в процессе бурения. Несмотря на то, что эти батареи безопасны при низких температурах, при нагревании свыше 180°С они могут подвергаться бурной, ускоренной реакции и взрываться со значительной силой. Несмотря на то, что эти батареи очень эффективны в течение срока их службы, они не являются перезаряжаемыми, а их утилизация регулируется строгими экологическими нормами.
Турбины, приводящие в действие электрогенератор, должны принимать широкий диапазон скоростей потока с тем, чтобы удовлетворять всем возможным условиям подачи бурового раствора, и должны быть выполнены с возможностью выдерживания значительного количества обломочной породы и закупоривающего материала, попадающих в буровой раствор.
Недостатками акустических систем, которые передают сигналы вверх по бурильной трубе, являются сильное затухание в буровом растворе и ограниченная скорость передачи данных, что накладывает серьезные ограничения на применение более точных измерительных устройств, требующих, например, более высоких скоростей передачи данных. Шум, вызываемый буровыми насосами и буровым двигателем, требует сложных способов фильтрации для получения собранных данных.
На практике, помимо прочего, для оптимального управления операцией бурения при помощи скважинного оборудования как с технической, так и с экономической точки зрения существует потребность в предоставлении в реальном времени или в режиме времени, близком к реальному времени, информации о динамических характеристиках бурового долота, компоновке низа бурильной колонны и бурильной колонне при бурении, без недостатков обычного измерения в процессе бурения, как описано выше.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения заключается в разработке способа и устройства для предоставления в реальном времени или режиме времени, приближенном к реальному времени, информации о динамических характеристиках скважинного бурового оборудования при бурении скважины в породной формации.
Еще одна задача заключается в создании скважинного оборудования для бурения скважины в породной формации, работающего с применением такого способа и/или оборудованного таким устройством.
В первом аспекте предложен способ оценки по меньшей мере одного из скорости вращения на забое скважины и крутящего момента на забое скважины для скважинного бурового оборудования при бурении скважины в породной формации. Скважинное буровое оборудование содержит вращательную приводную систему, бурильную колонну, которая имеет компоновку низа бурильной колонны, содержащую буровое долото, верхний конец, соединенный с вращательной приводной системой, и регулятор скорости, выполненный с возможностью управления скоростью вращения верхнего привода путем управления его крутящим моментом.
Способ, осуществляемый на компьютере, включает следующие этапы:
- получение компонентов матрицы перехода вычислительной модели на основе двухпортовой матрицы перехода в спектральной области для скважинного бурового оборудования, причем вычислительная модель содержит демпфирующие свойства скважинного бурового оборудования, скорость вращения на забое скважины и крутящий момент на забое скважины являются зависимыми переменными, а скорость вращения и крутящий момент верхнего привода являются независимыми переменными;
- получение скорости вращения и крутящего момента верхнего привода при бурении и
- вычисление по меньшей мере одного из скорости вращения на забое скважины и крутящего момента на забое скважины для скважинного бурового оборудования с использованием полученных компонентов матрицы перехода, скорости верхнего привода и крутящего момента верхнего привода,
причем указанный этап вычисления включает:
- уменьшение ширины спектральной полосы для указанного вычисления, причем уменьшенная ширина полосы выбрана таким образом, что она включает в указанном вычислении ограниченное количество спектральных мод более высокого порядка,
- применение, в спектральной области, времени задержки к указанному вычислению, причем время задержки выбрано таким образом, что оно обеспечивает причинно-следственное решение во временной области, и
- вычисление по меньшей мере одного из скорости вращения на забое скважины и крутящего момента на забое скважины для скважинного бурового оборудования с использованием примененных уменьшенной ширины спектральной полосы и добавленного времени задержки.
Способ основан на понимании того, что забойную динамику скважинного бурового оборудования, состоящего из бурильной колонны, компоновки низа бурильной колонны и бурового долота, можно оценить при помощи вычислительной модели на основе двухпортовой матрицы перехода в спектральной области, в которой скорость вращения на забое скважины и крутящий момент на забое скважины являются зависимыми переменными, а скорость вращения и крутящий момент верхнего привода являются независимыми переменными.
Чтобы численно, т.е. с помощью компьютера, в частности, компьютера общего назначения, вычислить скорость вращения и/или крутящий момент скважинного бурового оборудования на забое скважины, вычисления модифицируют путем уменьшения ширины спектральной полосы с тем, чтобы ограничить вычисления количеством спектральных мод, включающих только такие моды более высокого порядка, которые соответствуют требуемой точности, стабильности вычислений и/или времени вычислений. Ширина спектральной полосы не должна быть уменьшена таким образом, чтобы число спектральных мод более высокого порядка, учитываемых при расчете, было слишком маленьким, так что ошибка моделирования может стать значительной, поскольку модель не выражает достаточное количество мод колебаний.
Кроме того, чтобы компенсировать во временной области ограничение количества мод более высокого порядка, в спектральной области к каждому из вычислений применяют время задержки для получения скорости вращения на забое скважины и/или крутящего момента на забое скважины с тем, чтобы обеспечить причинно-следственное решение во временной области. Это позволяет обеспечить то, что вычисленная скорость вращения на забое скважины и/или крутящий момент на забое скважины обусловлены полученной скоростью вращения верхнего привода и крутящим моментом верхнего привода. Или, иными словами, обеспечивает зависимость выходного сигнала в момент времени t только от прошлых входных данных.
Скорость вращения на забое скважины и/или крутящий момент на забое скважины могут быть рассчитаны на основе операции умножения матрицы полученных значений скорости вращения и крутящего момента верхнего привода и компонентов матрицы перехода с применением уменьшенной ширины спектральной полосы и времени задержки, а также обратного спектрального преобразования во временной области.
Способ обеспечивает очень мощный инструмент анализа для операторов бурения, поскольку становится возможным на основании вычислительной модели на основе двухпортовой матрицы перехода в спектральной области, используя компьютер, автоматически вычислять и моделировать работу бурового долота и бурильной колонны в каждом положении в скважине во время текущей операции бурения без необходимости в дорогостоящем и подверженном повреждениям скважинном оборудовании для измерения и передачи данных. Специалистам в данной области техники понятно, что на практике измерение работы бурильной колонны вдоль ее длины, например, посредством применения датчиков вдоль бурильной колонны технически необоснованно.
Влияние изменения скорости вращения привода на верхнем конце на текущую работу бурового долота может быть надежно и автоматически рассчитано и предоставлено оператору бурения, например, для анализа с целью постоянного или непрерывного повышения эффективности бурения.
Поскольку способ может быть осуществлен во время начала бурения, регулятор скорости может быть автоматически, по существу мгновенно, адаптирован и настроен на соответствующие рабочие параметры скважинного бурового оборудования, в том числе для смягчения воздействия крутильных вибраций и резонанса в бурильной колонне путем демпфирования механической энергии, генерируемой компоновкой низа бурильной колонны, а также возникновения и воздействия режима прихватывания-проскальзывания и колебаний.
Вышеупомянутый способ был подтвержден на основании экспериментальных скважинных промысловых данных, полученных от нескольких действующих буровых установок.
В приведенном в качестве примера способе уменьшение ширины спектральной полосы и время задержки применяют путем:
- уменьшения ширины спектральной полосы компонентов матрицы перехода, причем уменьшенная ширина полосы выбрана таким образом, что она включает ограниченное количество спектральных мод более высокого порядка в компонентах матрицы перехода,
- добавления, в спектральной области, времени задержки к каждому из компонентов матрицы перехода, причем время задержки выбрано таким образом, что оно обеспечивает причинно-следственное решение во временной области, и
- вычисления по меньшей мере одного из скорости вращения на забое скважины и крутящего момента на забое скважины для скважинного бурового оборудования с использованием модифицированных компонентов матрицы перехода.
Модификация компонентов матрицы перехода является предпочтительной с вычислительной точки зрения в том смысле, что модифицированные компоненты матрицы перехода для множества положений скважины могут быть рассчитаны заранее, т.е. до того, как будут получены значения скорости вращения верхнего привода и крутящего момента верхнего привода.
Компоненты матрицы перехода, включая модифицированные компоненты матрицы перехода, могут принимать форму передаточных функций в спектральной области. В приведенном в качестве примера способе эквиваленты скорости вращения на забое скважины и крутящего момента на забое скважины во временной области вычисляют при помощи компьютера в причинно-следственной операции свертывания путем обработки полученных значений скорости вращения верхнего привода и крутящего момента верхнего привода и функций импульсного отклика модифицированных компонентов передаточной функции матрицы перехода в течение периода времени, включающего время прохождения сигнала в прямом и обратном направлениях в бурильной колонне. То есть туда и обратно вдоль длины бурильной колонны. Продолжительность прохождения в прямом и обратном направлении связана с продольной скоростью колебательных волн или вибраций, проходящих через бурильную колонну. На практике для эффективного численного вычисления выбирают период времени, превышающий на долю время прохождения сигнала в прямом и обратном направлениях. Например, доля может составлять 10-20% от времени прохождения сигнала в прямом и обратном направлениях.
Несмотря на то, что функции импульсного отклика должны охватывать промежуток времени в несколько секунд, чтобы полностью описать систему в целом, вычисление скорости вращения на забое скважины и/или крутящего момента на забое скважины для скважинного бурового оборудования на основании операций свертывания является с вычислительной точки зрения очень эффективным как в свете вычислительной мощности, так и времени обработки данных. В результате, вычисленная скорость вращения на забое скважины и крутящий момент на забое скважины для каждого из множества положений в скважине - включая скорость вращения долота и крутящий момент на долоте - могут быть представлены практически в режиме реального времени при бурении.
Термин «импульсный отклик» или «функция импульсного отклика» относится к поведению динамической системы в ответ на некоторые внешние изменения и может быть соответствующим образом синтезирован из имеющегося в продаже компьютерного программного обеспечения. Функция импульсного отклика описывает поведение системы во временной области как функцию короткого входного сигнала, называемого импульсом. Импульс может быть смоделирован как дельта-функция Дирака для непрерывных систем или как дельта Кронекера для моделируемых дискретных систем. Импульсный отклик вычисляют на основании обратного спектрального преобразования во временной области спектральной передаточной функции.
В одном примере вычисленная скорость вращения на забое скважины и крутящий момент на забое скважины для каждого из множества положений в скважине представлены на отображающем устройстве на пространственной графической диаграмме как функция времени и положения в скважине, в частности, например, на диаграмме волнового спектра скорости вращения и крутящего момента.
Уменьшение ширины спектральной полосы может быть получено с помощью любой подходящей функции фильтра и может быть основано, например, по меньшей мере на одном из демпфирующих свойств и длины бурильной колонны, так чтобы включать в расчет только спектральные моды более высокого порядка, имеющие спектральную плотность мощности выше выбранного значения, и/или максимальное количество спектральных мод более высокого порядка, например, 10 или предпочтительно до 20 или более предпочтительно до 30 спектральных мод выше основной моды, например. В целом, ширина полосы в 10 Гц или больше достаточна для обеспечения точных результатов на практике. Функциями фильтра, которые известны на практике и которые могут рассматриваться для целей настоящего изобретения, являются среди прочего, функции фильтра Баттерворта, Чебышева, Бесселя и Гаусса.
В приведенном в качестве примера способе ширину спектральной полосы уменьшают путем применения фильтра Бесселя нижних частот n-го порядка, где n ≥ 4, предпочтительно n ≥ 10 или более предпочтительно n ≥ 20, и сужения. Сужение или вырезание применяют для приведения к нулевому значению вычислений, т.е. компонентов матрицы перехода, в спектральной области за пределами выбранного интервала, т.е. за пределами выбранного окна. Для облегчения вычисления эквивалентов во временной области предпочтительна постепенно уменьшающаяся сужающая или вырезающая функция, среди прочего включающая в себя косинус, ограниченную функцию Гаусса, вырезающую функцию Уэлча и Ланцоша или аналогичную функцию.
Добавление времени задержки в спектральной области приводит к изменению фазы вычислений, т.е. компонентов матрицы перехода, и обеспечивает причинно-следственный импульсный отклик при преобразовании измененных таким образом вычислений, т.е. измененных компонентов матрицы перехода, в эквиваленты временной области, например посредством обратного преобразования Лапласа или обратного преобразования Фурье, например, обратного быстрого преобразования Фурье, ОБПФ. В приведенном в качестве примера способе к каждому из компонентов матрицы перехода может быть добавлено фиксированное время задержки, или может быть выбрано время задержки в зависимости от фактической, мгновенной или расчетной длины бурильной колонны. В частности, время задержки, равное по меньшей мере 1 секунде на 3000 м длины бурильной колонны.
В дополнительном примере способа добавленное время задержки содержит часть временной задержки, также представляющую временную задержку, вызванную работой фильтра Бесселя или любой другой выбранной функцией фильтра, действующей в спектральной области. На практике это время задержки составляет около 0,25 с и зависит от порядка и ширины полосы выбранной функции фильтра Бесселя.
В приведенном в качестве примера способе вычислительная модель на основе двухпортовой матрицы перехода в спектральной области представлена уравнением:

где: M11(s), M12(s), M21(s) и M22(s) представляют собой ограниченные по ширине полосы частот и модифицированные по времени задержки спектральные компоненты матрицы перехода, и каждый компонент может представлять передаточную функцию в спектральной области,
ωdn - скорость вращения на забое скважины, являющаяся зависимой переменной,
Tdh - крутящий момент на забое скважины, являющийся зависимой переменной,
ωtd - полученная скорость вращения верхнего привода, являющаяся независимой переменной,
Tref - задаваемый крутящий момент верхнего привода, являющийся независимой переменной,
τd - задержка по времени регулятора скорости вращения, и
s - оператор преобразования Лапласа.
Скорость ωdh вращения представлена в спектральной или частотной области суммированием результата умножения компонента M11(s) матрицы перехода на полученное значение скорости ωtd вращения верхнего привода и результата умножения компонента M12(s) матрицы перехода на задаваемое значение крутящего момента Tref верхнего привода и функцию e-sтd задержки по времени регулятора скорости вращения
Крутящий момент Tdh представлен в спектральной или частотной области суммированием результата умножения компонента M21(s) матрицы перехода на полученное значение скорости ωtd вращения верхнего привода и результата умножения компонента М22 матрицы перехода на задаваемое значение крутящего момента Tref верхнего привода и функцию e-sтd задержки по времени регулятора скорости вращения.
Следует отметить, что, если применимо, задержка по времени регулятора скорости включает в себя задержку частотно-регулируемого привода (ЧРП) для управления электродвигателем переменного тока, приводящим в движение роторный стол скважинного бурового оборудования. На практике такие задержки составляют порядка 10-30 мсек.
Как видно из вышеприведенного уравнения (1), вычисление скорости вращения на забое скважины и/или крутящего момента на забое скважины, т.е. зависимых переменных, в раскрытом способе не зависит от фактических настроек регулятора скорости и зависит только от задаваемой установленной величины Tref крутящего момента верхнего привода и измеряемой величины ωtd скорости вращения верхнего привода, которые являются независимыми переменными.
Поскольку способ может быть осуществлен во время начала бурения, регулятор скорости может быть автоматически, по существу мгновенно, адаптирован и настроен на соответствующие рабочие параметры скважинного бурового оборудования, в том числе для смягчения воздействия крутильных вибраций и резонанса в бурильной колонне путем демпфирования механической энергии, генерируемой компоновкой низа бурильной колонны, а также возникновения и воздействия режима прихватывания-проскальзывания и колебаний.
Моделирование динамики скважинного бурового оборудования является основой для системного анализа и управления. Действительная динамическая модель представляет собой модель, которая может генерировать существенные выходные сигналы на основании получаемых, т.е. измеренных, входных сигналов и оценивает выходные сигналы с приемлемой точностью. Существующие модели бурения можно в целом классифицировать как модели с сосредоточенными параметрами, с помощью которых бурильную колонну рассматривают в качестве системы масса-пружина-демпфер; модели с распределенными параметрами, в которых бурильную колонну рассматривают в качестве балки, подверженной осевым и/или скручивающим усилиям; модели конечных элементов и модели линий передач, в которых бурильную колонну моделируют множеством частей, каждая из которых состоит из четырех параметров и двух состояний, т.е. локальной скорости вращения и крутящего момента.
В дополнительном примере способа вычислительная модель на основе двухпортовой матрицы перехода в спектральной области скважинного бурильного оборудования содержит двухпортовую матрицу перехода в спектральной области, состоящую из единой или составной симметричной вычислительной модели бурильной колонны, эквивалентной двухпортовой линии передачи в спектральной области, включающей инерцию бурильной колонны, жесткость и демпфирующие свойства бурильной колонны в стволе скважины, инерцию компоновки низа бурильной колонны и инерцию верхнего привода. Компоненты матрицы перехода такой вычислительной модели сами по себе являются передаточными функциями в спектральной области, т.е. компонентами передаточной функции матрицы перехода, как описано в связи с вышеприведенным уравнением (1).
Со ссылкой на описанный выше раздел «Уровень техники» соответствующие механические параметры и эксплуатационные параметры геометрии колонны для вычисления компонентов матрицы перехода могут быть получены вручную и/или в цифровом виде под управлением оператора из сравнительной таблицы технических характеристик или другой подобной таблицы. При более тщательно разработанной реализации способ может быть осуществлен полностью автоматически и автономно при начале бурения без вмешательства оператора или другого квалифицированного персонала путем получения соответствующих механических параметров и параметров геометрии колонны на основании применения изобретения, описанного в международной патентной заявке WO 2014/098598, поданной настоящим заявителем.
Двухпортовая линия передачи в спектральной области, эквивалентная бурильной колонне, основана на допущении, что динамические характеристики бурильной колонны, т.е. инерция бурильной колонны, демпфирование стенки ствола скважины, жесткость и демпфирование в материале, не изменяются вдоль длины бурильной колонны. Однако на практике, как описано в приведенном выше разделе «Уровень техники», по мере бурения геометрия колонны и механические характеристики трубчатых элементов бурильной колонны могут изменяться. Трение, испытываемое бурильной колонной, например, за счет механического контакта бурильной колонны с внутренней стенкой ствола скважины, также может изменяться во время работы. В таком случае бурильная колонна может быть смоделирована с помощью составной матрицы перехода, образованной перемножением каскада двухпортовых матриц перехода соответствующих секций бурильной колонны, каждую из которых можно считать однородной по всей длине в отношении динамических характеристик. Кроме того, компоненты матрицы каждой матрицы перехода отражают конкретные динамические характеристики соответствующей секции или отрезка.
Информация об отклонении или угле наклона ствола скважины, влияющих на трение, испытываемое бурильной колонной, может быть получена от скважинных датчиков и передатчиков направления. Поскольку геометрическое направление бурового долота изменяется медленно с течением времени, информация от таких датчиков направления может быть надежно передана вверх по бурильной трубе с относительно низкой скоростью передачи.
В целях представления или визуализации, т.е. для обеспечения бурильщика или руководителя буровых работ почти в реальном масштабе времени кратким обзором динамических характеристик забойной части скважинного бурового оборудования, в приведенном в качестве примера способе обеспечивают при помощи компьютера по меньшей мере одно из скорости вращения на забое скважины и крутящего момента на забое скважины для множества различных положений вдоль длины бурильной колонны или вдоль ствола скважины путем вычисления для каждого положения функций импульсного отклика модифицированных компонентов передаточной функции матрицы перехода и путем обработки в причинно-следственной операции свертывания на основании каждой из вычисленных функций импульсного отклика для соответствующего положения и полученных значений скорости вращения верхнего привода и крутящего момента верхнего привода по меньшей мере одного из скорости вращения на забое скважины и крутящего момента на забое скважины в соответствующем положении.
Положения каждый раз ссылаются на заданную фиксированную точку скважинного бурового оборудования, такую как плоскость земной поверхности, в которой бурят скважину, или другое фиксированное исходное положение, такое как верхний конец бурильной колонны. Функции импульсного отклика для конкретного положения могут быть рассчитаны заранее, т.е. на первом этапе обработки, в то время как соответствующие операции свертывания выполняют на втором этапе обработки после получения значений скорости вращения верхнего привода и крутящего момента верхнего привода. Скорость вращения на забое скважины и/или крутящий момент на забое скважины для множества положений могут быть графически представлены при бурении на отображающем устройстве на пространственной графической диаграмме как функция времени и положения, в частности, на диаграмме волнового спектра скорости вращения и крутящего момента.
Способ или его этапы могут быть выполнены с помощью компьютера или оборудования для обработки данных, расположенного на буровой площадке, и/или с помощью компьютера или компьютерной системы, отделенной и удаленной от скважинного бурового оборудования.
Во втором аспекте предложено устройство для оценки по меньшей мере одного из скорости вращения на забое скважины и крутящего момента на забое скважины для скважинного бурового оборудования при бурении скважины в породной формации. Скважинное буровое оборудование содержит вращательную приводную систему, бурильную колонну, которая имеет компоновку низа бурильной колонны, содержащую буровое долото, верхний конец, соединенный с вращательной приводной системой, и регулятор скорости, выполненный с возможностью управления скоростью вращения верхнего привода путем управления его крутящим моментом.
Устройство содержит управляемую компьютером систему наблюдения за операцией бурения, выполненную с возможностью:
- получения компонентов матрицы перехода вычислительной модели на основе двухпортовой матрицы перехода в спектральной области для скважинного бурового оборудования, причем вычислительная модель содержит демпфирующие свойства скважинного бурового оборудования, скорость вращения на забое скважины и крутящий момент на забое скважины являются зависимыми переменными, а скорость вращения и крутящий момент верхнего привода являются независимыми переменными;
- получения скорости вращения и крутящего момента верхнего привода при бурении, и
- вычисления по меньшей мере одного из скорости вращения на забое скважины и крутящего момента на забое скважины для скважинного бурового оборудования с использованием полученных компонентов матрицы перехода, скорости верхнего привода и крутящего момента верхнего привода,
причем указанное вычисление включает:
- уменьшение ширины спектральной полосы для вычисления, причем уменьшенная ширина полосы выбрана таким образом, что она включает в указанном вычислении ограниченное количество спектральных мод более высокого порядка,
- применение, в спектральной области, времени задержки к указанному вычислению, причем время задержки выбрано таким образом, что оно обеспечивает причинно-следственное решение во временной области, и
- вычисление по меньшей мере одного из скорости вращения на забое скважины и крутящего момента на забое скважины для скважинного бурового оборудования с использованием примененных уменьшенной ширины спектральной полосы и добавленного времени задержки.
В дополнительных вариантах осуществления устройство выполнено таким образом, что управляемая компьютером система наблюдения за операцией бурения выполнена с возможностью оценки по меньшей мере одного из скорости вращения на забое скважины и крутящего момента на забое скважины в соответствии со способом по любому из вышеописанных примеров.
Еще в одном варианте осуществления устройство функционально соединено с регулятором скорости или встроено в него непосредственно для получения скорости вращения и крутящего момента верхнего привода.
В третьем аспекте предложено скважинное буровое оборудование для бурения скважины в породной формации, содержащее: вращательную приводную систему, бурильную колонну, которая имеет компоновку низа бурильной колонны, содержащую буровое долото, верхний конец, соединенный с вращательной приводной системой, регулятор скорости, выполненный с возможностью управления заданным крутящим моментом, т.е. с возможностью изменения скорости вращения привода верхнего конца, и устройство для оценки по меньшей мере одного из скорости вращения на забое скважины и крутящего момента на забое скважины для скважинного бурового оборудования по любому из вышеописанных примеров.
В четвертом аспекте предложен компьютерный программный продукт, хранящий компьютерный программный код на носителе, который может быть считан компьютером, причем компьютерный программный код выполнен с возможностью осуществления способа по меньшей мере по одному из вышеописанных примеров в случае, когда компьютер функционально соединен со скважинным буровым оборудованием и исполняет программный код.
Компьютерный программный продукт может включать в себя машиночитаемый носитель, на котором хранятся инструкции машинного кода, которые могут быть использованы для программирования компьютера (или других электронных устройств) для осуществления способа согласно настоящему изобретению.
Машиночитаемый носитель может включать в себя, помимо прочего, некратковременные носители, такие как оптические диски, CD-ROM (компакт-диски только для чтения) и магнитооптические диски, ПЗУ (постоянные запоминающие устройства), ОЗУ (оперативные запоминающие устройства), СППЗУ (стираемые программируемые постоянные запоминающие устройства), ЭСППЗУ (электромагнитные стираемые программируемые постоянные запоминающие устройства), магнитные или оптические карты, флэш-память или другой тип носителей/машиночитаемого носителя, подходящий для хранения электронных инструкций. Кроме того, компьютерный программный продукт также может быть осуществлен с помощью загружаемого сигнала компьютерного программного продукта, причем программа может быть передана с удаленного компьютера (например, компьютера-сервера) на запрашивающий компьютер (например, компьютер-клиент) при помощи сигналов данных, реализованных в несущей волне или другой среде распространения посредством линии связи (например, модема или сетевого соединения). Соответственно, несущую волну следует рассматривать как содержащую машиночитаемый носитель.
Вышеупомянутые и другие особенности и преимущества настоящего изобретения будут лучше поняты из нижеследующего подробного описания со ссылкой на сопроводительные чертежи. На чертежах схожие ссылочные позиции обозначают одинаковые детали или детали, выполняющие идентичные или сопоставимые функции или операции.
Хотя представленные примеры относятся к конкретному компьютерному программному обеспечению, использующему MATLAB™ для вычисления компонентов матрицы перехода выбранной вычислительной модели и их эквивалентов во временной области, а также функций импульсного отклика, выполнения преобразований в спектральной области и обратных или спектральных преобразований во временную область, операций с матрицами, операций свертывания и операций фильтрации, способ, устройство, скважинное буровое оборудование и компьютерный программный продукт, раскрытые в разделе «Раскрытие сущности изобретения» настоящей заявки, не должны рассматриваться как ограниченные этим типом компьютерных программ. Наоборот, настоящее изобретение может быть применено с любой имеющейся в продаже компьютерной программой для вычисления преобразований спектральной области и обратных преобразований передаточных функций и функций импульсного отклика динамической системы, операций с матрицами, операций свертывания и операций фильтрации, а также с оригинальным программным обеспечением, написанным, например, на С, C+ или C++.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
ФИГ. 1 очень схематично изображает известное скважинное бурильное оборудование для бурения скважины в породной формации.
ФИГ. 2 изображает модель системы в спектральной области скважинного бурового оборудования, показанного на ФИГ. 1, с моделью бурильной колонны с сосредоточенными параметрами.
ФИГ. 3 изображает модель бурильной колонны с распределенными параметрами в спектральной области.
ФИГ. 4 изображает электрическую эквивалентную принципиальную схему секции колонны модели колонны с распределенными параметрами, показанной на ФИГ. 3.
ФИГ. 5 изображает электрическую эквивалентную принципиальную схему линии передачи, выполненную с возможностью применения для моделирования бурильной колонны.
ФИГ. 6а, 6b, 6с, 6d изображают графики функций импульсного отклика, которые рассчитаны для практического скважинного бурильного оборудования, моделируемого в системе испытания методом моделирования заявителя, причем бурильная колонна представлена моделью, содержащей один сегмент или секцию, и моделью, содержащей четыре сегмента или секции, в соответствии с настоящим изобретением.
ФИГ. 7а, 7b, 7с графически изображают на протяжении выбранного периода времени скорость вращения долота и вклады в скорость вращения долота, рассчитанные для скважинного бурового оборудования, соответствующего представленному на ФИГ. 6a-6d, на основе функций импульсного отклика четырехсегментной бурильной колонны и полученных фактических значений скорости вращения верхнего привода и задаваемого крутящего момента верхнего привода в системе испытания методом моделирования.
ФИГ. 8 графически изображает в увеличенном масштабе времени относительно ФИГ. 7а-7с фактические измеренные значения скорости вращения долота и значения скорости вращения долота, рассчитанные в соответствии с настоящим изобретением на основе модели четырехсегментной бурильной колонны и модели односегментной бурильной колонны для скважинного бурового оборудования, смоделированного в системе испытания методом моделирования, соответствующей представленной на ФИГ. 6a-6d.
ФИГ. 9а, 9b, 9с, 9d графически изображают на протяжении выбранного периода времени вклады в крутящий момент на долоте, рассчитанные для скважинного бурового оборудования на основе функций импульсного отклика четырехсегментной бурильной колонны и полученных фактических значений скорости вращения верхнего привода и задаваемого крутящего момента верхнего привода, а также рассчитанный и измеренный крутящий момент на долоте, смоделированный в системе испытания методом моделирования, соответствующей представленной на ФИГ. 6a-6d.
ФИГ. 10а и 10b графически изображают в разные моменты времени скорость вращения на забое скважины без применения и с применением управления, смягчающего последствия режима прихватывания-проскальзывания, соответственно, рассчитанную в соответствии с настоящим изобретением.
ФИГ. 11 графически изображает на пространственной или трехмерной диаграмме скорость вращения на забое скважины при бурении, рассчитанную в соответствии с настоящим изобретением, для выбранного периода времени до и после применения управления, смягчающего последствия режима прихватывания-проскальзывания.
ФИГ. 12 графически изображает на пространственной или трехмерной диаграмме крутящий момент на забое скважины, рассчитанный в соответствии с настоящим изобретением, для выбранного периода времени до и после применения управления, смягчающего последствия режима прихватывания-проскальзывания.
ФИГ. 13 изображает упрощенную блок-схему для автоматического определения скорости вращения на забое скважины и/или крутящего момента на забое скважины на основе вычислительной модели скважинного бурового оборудования в соответствии с настоящим изобретением.
ФИГ. 14 схематически изображает скважинное буровое оборудование, выполненное с возможностью работы в соответствии с настоящим изобретением.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На ФИГ. 1 очень схематично изображено обычное скважинное буровое оборудование 10 буровой установки для бурения скважины в породной формации. Режущий инструмент или буровое долото 17 соединено с компоновкой 11 низа бурильной колонны (КНБК) на нижнем конце 13 бурильной колонны 12. На верхнем ее конце 14 бурильная колонна 12 соединена с вращательной приводной системой 15, также называемой верхним приводом или роторным столом, который в свою очередь прикреплен к поверхности породной формации, в которой необходимо пробурить скважину, посредством буровой вышки или шасси буровой установки, или может быть установлен на судно или что-либо подобное (не показано).
Бурильная колонна 12 содержит отрезки полых трубчатых элементов или бурильные трубы, последовательно соединенные друг с другом посредством резьбового соединения. Обычная бурильная колонна имеет длину несколько километров, например 0-10 км, при этом диаметр бурильной трубы может составлять примерно 100-300 мм, а толщина стенки может составлять примерно 10-50 мм. Компоновка 11 низа бурильной колонны (КНБК) состоит из более тяжелых труб, которые могут иметь, например, наружный диаметр около 250-500 мм и толщину стенки около 100 мм. Длина КНБК обычно составляет 100-300 м. Бурильная колонна выполнена очень тонкой по сравнению со своей длиной.
Хотя это не показано, при реальной операции бурения буровой раствор закачивают через бурильные трубы бурильной колонны 12 в направлении бурового долота 17 для охлаждения и смазки бурового долота 17. Шлам от операции бурения уносится обратно на поверхность посредством бурового раствора, проходящего через кольцевое пространство, образованное между наружной окружностью бурильной колонны 12 и стенкой скважины (не показана).
Компоновка 11 низа бурильной колонны содержит несколько датчиков и передатчиков 16 и инструмент для наклонного бурения (не показан) для направления компоновки 11 низа бурильной колонны для бурения скважины в определенном направлении в породной формации, таком как вертикальное, горизонтальное или отклоненное под некоторым углом и, конечно, их сочетание.
Данные бурения и информация отображаются на пульте 19 управления, содержащем дисплей или другое устройство вывода данных (не показано) и устройство ввода, такое как клавиатура, сенсорный экран и тому подобное (не показано), посредством которого через промежуточный регулятор 20 скорости бурильщик может управлять скоростью вращения приводной системы 15 путем ввода настроечных параметров для регулятора 20 скорости и/или путем установки предела крутящего момента для приводной системы 15, для управления скоростью вращения бурового долота 17.
Приводная система 15 содержит двигатель 18 системы привода вращательного движения для вращения бурильной колонны 12, КНБК 11 и, таким образом, бурового долота 17. Между двигателем 18 приводной системы и бурильной колонной 12 при необходимости может быть установлена коробка 22 передач, имеющая определенное передаточное отношение или диапазон передаточных отношений.
В настоящее время двигатель 18 приводной системы обычно представляет собой электродвигатель, например асинхронный электродвигатель мощностью 800 кВт, питаемый силовым преобразователем. Однако настоящее изобретение в равной степени применимо к синхронной машине, щеточной машине постоянного тока, дизельному двигателю, гидравлическому двигателю и т.п. Скорость вращения бурильной колонны 12 может быть измерена на ее верхнем конце 14 с помощью индикатора скорости или датчика 21 скорости, например, датчика скорости на быстро вращающемся валу двигателя, сигнал измерения которого является входным сигналом, подаваемым на регулятор 20 скорости. Тем не менее, в случае электродвигателя приводной системы скорость верхнего привода бурильной колонны может быть получена при помощи регулятора 20 скорости бессенсорным способом, например, на основании напряжения и тока, подаваемых на электродвигатель 18 приводной системы.
При использовании бурильная колонна 12 за свой верхний конец 14 может быть поднята вверх с помощью подъемного механизма, также называемого буровой лебедкой (не показана). При нахождении на забое скважины КНБК 11, находящаяся на нижнем конце 13 колонны, опирается на породную формацию или касается ее буровым долотом 17. Это положение противоположно положению КНБК 11 выше забоя скважины, в котором буровое долото 17 не касается породной формации на дне скважины. Тонкие бурильные трубы бурильной колонны 12 постоянно находятся в натяжении, в то время как толстостенная нижняя часть КНБК 11 частично подвержена сжатию. Натяжение в бурильных трубах позволяет избежать продольного изгибания секции бурильной трубы. Однако жесткость при кручении секции бурильной трубы относительно невелика из-за ее тонкой конструкции.
На практике было разработано и использовано несколько типов регуляторов 20 скорости, регулирующая работа которых соответствует общеизвестному ПИ-регулятору, выполненному с возможностью обеспечения пропорционального воздействия П и интегрального воздействия И, или ПИИ-регулятору, например, с двойным интегральным воздействием. В случае электродвигателя 18 приводной системы, например, регулятор 20 скорости может быть выполнен с возможностью работы на основании обратной связи от любого или всех переменных параметров измерений, таких как ток приводного двигателя, скорость вращения приводного двигателя и колебания силы тока приводного двигателя и скорости вращения. Это позволяет, например, управлять потоком энергии в приводной системе 15 путем управления любой или обеими этими переменными и измерять скорость вращения, прикладываемую приводным двигателем 18 на верхнем конце 14 бурильной колонны 12.
Приводная система 15 может работать в различных режимах, таких как так называемый режим центрифугирования и режим свинчивания, и настоящее изобретение в основном, но не исключительно, относится к режиму бурения, во время которого бурильщик стремится эффективно раздробить или вырезать материал из породной или геологической формации путем подачи и поворота бурового долота 17 и промывки ствола скважины буровым раствором.
Динамическая система, состоящая из верхнего привода, бурильной колонны и компоновки низа бурильной колонны, может быть представлена различными моделями или комбинацией различных моделей, среди которых модель пространства состояний, эквивалентная модель электрической цепи, эквивалентная модель механической инерции торсионной пружины, сегментированная модель, непрерывная модель, дискретная модель, модель спектральной или частотной области и модели распространения волн, такие как модели линий передачи механического и электрического типа.
С целью объяснения настоящего изобретения на ФИГ. 2 показана упрощенная вычислительная динамическая модель скважинного бурового оборудования 10, представленного на ФИГ. 1, в спектральной области. Спектральная область представлена комплексным аргументом или оператором s, в соответствии с общеизвестной теорией преобразования Лапласа.
Ссылочные позиции 34, 35, 36, 37, 38 и 39 на ФИГ. 2 обозначают операции суммирования, т.е. представлены маленькими кружками, имеющими входы, обозначенные стрелками, направленными к кружку, и выход, обозначенный стрелкой, направленной от кружка. Значение на выходе соответствующего сумматора представляет собой сумму значений на его входах с учетом соответствующего знака, т.е. плюса или минуса, указанного на конкретном входе на ФИГ. 2.
Бурильную колонну 12 моделируют в соответствии с так называемой «моделью колонны с сосредоточенными параметрами». В такой модели колонны с сосредоточенными параметрами бурильная колонна 12 в целом, т.е. от ее верхнего конца 14 до ее нижнего конца 13, упрощенно представлена одной торсионной пружиной, испытывающей демпфирующее действие, вызванное внутренним и внешним трением, действующим вдоль бурильной колонны 12. Внутреннее трение, среди прочего, вызвано деформационными потерями внутри стали труб бурильной колонны и пропорционально скорости подъема/спускания бурильной колонны. Буровой раствор, который закачивают к КНБК 11 с целью смазки, и буровой шлам от бурового долота 17, который циркулирует обратно вверх по кольцевому пространству, т.е. пространству между наружной окружностью бурильной колонны 12 и стенкой скважины, к поверхности земли, также являются причиной трения вследствие разницы скоростей бурильной колонны и бурового раствора. Все такие силы трения, связанные с буровым раствором или буровым шламом, считаются внешним трением.
В модели спектральной области на ФИГ. 2 бурильная колонна 12 представлена своей передаточной функцией 40, и предполагается, что она имеет жесткость на кручение Ks [Нм/рад], инерцию колонны Js [кгм2], внутреннее трение Yint [Нмс/рад] и внешнее трение Yext [Нмс/рад]. В спектральной области торсионное действие 23 бурильной колонны 12 моделируется ее жесткостью на кручение Ks и операцией преобразования Лапласа 1/с, т.е. Ks/c. Инерционное действие 24 моделируется взаимно-обратным или обратным движением инерции колонны Js и операцией преобразования Лапласа 1/с, т.е. 1/(cJs). Действия Yint, Yext внутреннего и внешнего трения вдоль бурильной колонны 12 представлены элементами 26, 27 соответственно, вместе с их знаком суммирования на соответствующем входе операций 36, 37 суммирования соответственно.
КНБК 11 и буровое долото 17 могут быть представлены концентрированной инерцией Jbha [кгм2] и концентрированным трением Ybha [Нмс/рад] на нижнем конце 13 бурильной колонны 12. В спектральной области концентрированное инерционное действие 25 представлено взаимно-обратным или обратным движением инерции Jbha и операцией преобразования Лапласа 1/с, т.е. 1/(cJbha). Действие Ybha концентрированного трения представлено элементом 28 вместе с его знаком суммирования на соответствующем входе операции 39 суммирования.
Вращательная приводная система 15 представлена инерцией Jtd [кгм2], а ее действие смоделировано взаимно-обратным или обратным движением инерции 3td и операцией преобразования Лапласа 1/с, т.е. 1/(cJtd), представленной блоком 29.
Вращательная приводная система 15 в сочетании с частотно-регулируемым приводом (ЧРП), если он применим, действующим в качестве источника крутящего момента с высокой пропускной способностью, конденсируется в передаточной функции D(s), представленной ссылочной позицией 30. Ссылочная позиция 31 представляет передаточную функцию A(s) скорости-крутящего момента регулятора 20 скорости. Фильтр 32 скорости, имеющий передаточную функцию G(s), может находиться внутри или присоединяться снаружи ко входу регулятора 20 скорости, представленному операцией 34 суммирования, для ввода измерительного сигнала индикатора скорости или датчика 21 скорости, например, посредством измерения скорости вращения ωtd [рад/с] верхнего привода. Блок 33 представляет фильтр крутящего момента, имеющий передаточную функцию E(s), которая может присутствовать в регуляторе 20 скорости.
В модели, показанной на ФИГ. 2, ωset [рад/с] представляет исходную скорость вращения бурильщика, т.е. скорость вращения, установленную бурильщиком на входе регулятора 20 скорости. Сигнал ωerr представляет разность между сигналом ωtd скорости вращения, представляющим фактическую скорость вращения на верхнем конце 14 бурильной колонны 12, и исходным или установленным сигналом ωset скорости вращения и образуется посредством операции 34 суммирования, т.е. ωerr=ωset-ωtd, и является входным сигналом для передаточной функции A(s) 31.
При бурении регулятор 20 скорости генерирует заданный сигнал Tref [Нм] крутящего момента для управления двигателем 18 приводной системы, представленный передаточной функцией D(s) 30. Фактический крутящий момент, обеспечиваемый приводной системой 15, т.е. на выходе передаточной функции D(s) в вычислительной модели, представленной на ФИГ. 2, называется Tact [Нм]. Tmeas представляет фактический крутящий момент Tact, на что указывает регулятор 20 скорости, например, через передаточную функцию E(s) фильтра 33 крутящего момента.
Накопленный крутящий момент Тасс [Нм], испытываемый приводной системой 15, т.е. блоком 29 в модели на ФИГ. 2, представлен разностью между крутящим моментом Tact, приложенным двигателем 18 приводной системы, и фактическим крутящим моментом Ts [Нм] нагрузки на верхнем конце 14 бурильной колонны 12, и образован операцией 35 суммирования, т.е. Тасс=Tact-Ts. Крутящий момент нагрузки, действующий на буровом долоте 17, представлен Tbit [Нм], а скорость вращения бурового долота, т.е. КНБК 11, выражена ωbit [рад/с].
Следует отметить, что в модели системы, показанной на ФИГ. 2, бурильная колонна 12 представлена двухпортовой передаточной функцией 40 в спектральной области, входными переменными которой являются крутящий момент Tbit на долоте и скорость ωtd вращения верхнего привода, а выходными переменными которой являются крутящий момент Ts нагрузки и скорость ωbit вращения долота. Именно этот выбор входных и выходных параметров объясняет выбор знаков на соответствующих входах операций 35, 37 и 38 суммирования, как указано.
В настоящем описании и формуле изобретения использована обобщенная запись двухпортовой матрицы перехода, в которой крутящий момент Tbit на долоте и скорость ωbit вращения долота на стороне забоя скважины образуют зависимые переменные, а крутящий момент Ts нагрузки и скорость ωtd вращения верхнего привода на стороне верхнего конца образуют независимые переменные.
Модель колонны с сосредоточенными параметрами может быть дополнительно упрощена путем замены инерции колонны Js концентрированной инерцией Jbha и пренебрежения концентрированным трением Ybha.
При использовании бурильная колонна 12 за свой верхний конец 14 может быть поднята вверх с помощью подъемного механизма, также называемого буровой лебедкой (не показана). При нахождении на забое скважины КНБК 11, находящаяся на нижнем конце 13 колонны, опирается на породную формацию или касается ее буровым долотом 17. Это положение противоположно положению КНБК 11 выше забоя скважины, в котором буровое долото 17 не касается породной формации на дне скважины. Следует отметить, что при работе выше забоя скважины демпфирование или концентрированное трение Ybha будет меньше, чем в положении, когда буровое долото касается породной формации на забое скважины, что приводит к гораздо более высокому коэффициенту демпфирования, чем при положении выше забоя скважины.
Модель колонны с сосредоточенными параметрами не учитывает ни время прохождения крутильных волн, ни более высокие моды в бурильной колонне. Однако передаточная функция 40 бурильной колонны 12 в целом также представляет передаточную функцию части бурильной колонны. Соответственно, бурильная колонна в целом может быть представлена в спектральной области путем каскадирования множества двухпортовых передаточных функций, каждая из которых представляет секцию или отрезок бурильной колонны 12 от ее верхнего конца 14 до нижнего конца 13, как показано на ФИГ. 3.
Модель 45 бурильной колонны с распределенными параметрами в спектральной области, представленная на ФИГ. 3, состоит из N-1 секций или сегментов 451, 452, 45n, … 45N-1, двухпортовой передаточной функции колонны, причем N является целым числом ≥ 2. Зависимые переменные секции n, т.е. крутящий момент Tn+1 и скорость ωn+1 вращения образуют независимые переменные следующей секции n+1, т.е. крутящий момент Tn и скорость ωn вращения соответственно, этой секции n+1. Скорость ω1 вращения первой секции на верхнем конце 14 бурильной колонны 12 является скоростью ωtd вращения верхнего привода, а крутящий момент T1 первой секции является фактическим крутящим моментом Ts нагрузки на верхнем конце 14 бурильной колонны 12. Скорость ωN вращения последней секции N на нижнем конце 13 бурильной колонны 12 представляет собой скорость ωbit вращения долота, в то время как крутящий момент TN действует на КНБК 11 и буровом долоте 17.
Длина x вдоль бурильной колонны 12, т.е. расстояние в скважине, подлежащей бурению, схематично обозначена вектором 44, проходящим от верхнего конца 14 до нижнего конца 13 бурильной колонны 12. Предполагается, что в конкретной секции n бурильной колонны соответствующая часть или отрезок бурильной колонны 12 имеет жесткость Kn,n+1 на кручение, инерцию Jn,n+1, внутреннее трение Ynint и внешнее трение Ynext.
Предполагается, что все элементы линейные, что является обоснованным допущением для определения эффективного трения «слабого сигнала». Кулоновское трение, т.е. постоянный крутящий момент, зависящий только от направления движения, или «трение Штрайбека», крутящий момент, который уменьшается с увеличением скорости, эффективно действуя как дестабилизирующее отрицательное трение слабого сигнала, которое считается движущей силой в сохраняющихся колебаниях прихватывания-проскальзывания при неблагоприятных настройках регулятора верхнего привода, не представлены линейной моделью, показанной на ФИГ. 2. Когда нужно учитывать кулоновское трение, оно может быть расценено как фиксированное значение, обычно равное нескольким Нм/метр или нескольким кНм/километр, для отрезка бурильной колонны и может быть добавлено к внешнему трению, связанному с буровым раствором.
В альтернативном варианте механическая вычислительная модель бурильной колонны, показанная на ФИГ. 3, может быть представлена электрической эквивалентной принципиальной схемой, содержащей электрические элементы. На ФИГ. 4 изображен электрический эквивалент части 45n модели колонны с распределенными параметрами, показанной на ФИГ. 3.
На принципиальной электрической схеме, показанной на ФИГ. 4, соответствующая часть или отрезок 45n бурильной колонны моделируется катушкой Ln индуктивности со значением индуктивности Ln=1/Kn,n+1 [Гн]. Инерция соответствующей части или отрезка бурильной колонны моделируется конденсатором Cn со значением емкости Cn=Jn,n+1 [Ф]. Внутреннее и внешнее трение представлены резистором Rnint, имеющим значение сопротивления Rnint [Ω] и соединенным параллельно с катушкой индуктивности Ln, и резистором Rnext, имеющим значение сопротивления Rnext [Ω] и соединенным параллельно с конденсатором Cn соответственно. Следует отметить, что адмиттанс Y [A/V] и импеданс или сопротивление R [V/A] являются взаимно-обратными, таким образом Rnint=1/Ynint and Rnext=1/Ynext.
Для секции n сила тока in [А] и напряжение un [В] представляют независимые переменные крутящий момент Tn и скорость ωn вращения соответственно, а сила тока in+1 [А] и напряжение un+1 [В] представляют зависимые переменные крутящий момент Tn+1 и скорость ωn+1 вращения соответственно.
Реалистичная модель колонны с распределенными параметрами может быть построена с использованием множества десятков или даже сотен частей или отрезков, каждая из которых состоит из четырех параметров и двух состояний (локальной скорости и крутящего момента). Такая модель напоминает многозвенную ступенчатую схему, используемую в моделях линий передач в электронике. Однако основное отличие заключается в том, что резистор Rnint параллелен катушке Ln индуктивности. В электрической модели активное сопротивление обмотки электрических проводников соединено последовательно с катушкой индуктивности, а не параллельно, как представлено в настоящей заявке в механической модели колонны, показанной на ФИГ. 4. Другим отличием является часто игнорируемое сопротивление Rnext в электрических моделях линий передачи, поскольку электрическая изоляция между проводниками в основном очень высокая, и ее эффектом можно пренебречь, хотя в моделях линий передачи коаксиального кабеля рассматриваются диэлектрические потери, вызванные этой электрической изоляцией. Однако вязкое трение при кручении, создаваемое трением бурового раствора и стенки скважины, очень существенно при бурении скважины и должно быть включено в механическую модель колонны и, соответственно, в ее электрический эквивалент. Следовательно, стандартная эквивалентная электрическая принципиальная схема линии передачи должна быть модифицирована, чтобы быть применимой для моделирования бурильной колонны, как показано на ФИГ. 5 моделью линии передачи в виде многозвенной ступенчатой схемы.
Эквивалентная электрическая принципиальная схема, показанная на ФИГ. 5, представляет собой каскад эквивалентных электрических принципиальных схем в соответствии с ФИГ. 4 соответствующих частей 451, 452, 45n, … 45N-1 колонны модели колонны с распределенными параметрами, показанной на ФИГ. 3, и может быть представлена двухпортовой передаточной функцией в спектральной области. Входной ток i1 и входное напряжение u1, представленные источником 46 напряжения, являются независимыми переменными T1 и ω1 соответственно, а выходной ток in+1, представленный источником 47 тока, и выходное напряжение un+1 являются зависимыми переменными TN и ωN соответственно.
Модель, подобная показанной на ФИГ. 5, создает очень большое количество параметров для идентификации. К счастью, схема на ФИГ. 5 может быть записана в спектральной или частотной области для предельного случая, когда N стремится к бесконечности. Можно доказать, что для бурильной колонны длиной L и бесконечного числа N секций колонны длиной dx, таких что N=L/dx→∞, двухпортовая матрица перехода в спектральной области может быть выражена как:

где
y = коэффициент распространения [1/м]
Y0 = характеристический адмиттанс [Нмс/рад]
Z0 = 1/Y0 = характеристический импеданс [рад/Нмс]
L = длина бурильной колонны [м]


ω1 = скорость вращения на верхнем конце бурильной колонны [рад/с]
T1 = крутящий момент на верхнем конце бурильной колонны [Нм]
ωN = скорость вращения на нижнем конце бурильной колонны [рад/с]
TN = крутящий момент на нижнем конце бурильной колонны [Нм]
Коэффициент распространения и характеристический адмиттанс или импеданс могут быть получены на основании механических свойств бурильной колонны. Предположим, что бурильная колонна выполнена из стальных труб, имеющих удельную массу ρ [кг/м3], модуль сдвига G [Н/м2], удельное вязкостное демпфирование стенки κ [Нс/м4] и удельное вязкостное демпфирование, возникающее из гистерезисных потерь δ [Нс/м2]. При s, являющемся оператором преобразования Лапласа, в спектральной области применяются следующие уравнения:

Динамические характеристики отрезка dx [м] бурильной колонны, имеющего поперечный полярный момент IP = п/32⋅(OD4-ID4) [м4], где OD = наружный диаметр [м] и ID = внутренний диаметр [м] бурильной трубы, могут быть выражены как:


где: ρ⋅s⋅IP ≡ инерция Jn,n+1, секции бурильной колонны,
κ⋅IP⋅dx ≡ демпфирование стенки или наружное трение Ynext секции бурильной колонны,
(G⋅IP)/(s⋅dx) ≡ жесткость Kn,n+1 при кручении секции бурильной колонны, и
δ⋅IP/dx ≡ демпфирование в материале или внутреннее трение Ynint секции бурильной колонны
Результирующие характеристики матрицы перехода могут быть найдены из следующих уравнений:
коэффициент распространения 
характеристический адмиттанс 
характеристический импеданс 
С помощью уравнения (2) можно легко рассчитать в спектральной области поведение однородной бурильной колонны любой длины.
Если механические свойства бурильной колонны и/или внутреннее и внешнее трение не одинаковы по длине бурильной колонны, что смоделировано с помощью составной матрицы перехода, состоящей из умножения каскада двухпортовых матриц перехода в спектральной области, компоненты матрицы перехода каждой соответствующей матрицы перехода этого каскада представляют собой механические свойства и трение или демпфирование соответствующей части или отрезка бурильной колонны, которые можно считать однородными, в соответствии с вышеупомянутой матрицей (2) перехода.
Например, предположим, что бурильная колонна 12, показанная на ФИГ. 1, моделируется в соответствии с электрической моделью линии передачи, описанной выше, первой секцией (а), проходящей от верхнего конца 14, и второй секцией (b), заканчивающейся на нижнем конце 13 в скважине. Пусть ω1 и T1 - скорость вращения и крутящий момент, действующие на верхнем конце бурильной колонны, ω2 и Т2 - скорость вращения и крутящий момент, действующие на границе раздела первой (а) и второй (b) секций бурильной колонны, а ω3 и Т3 - скорость вращения и крутящий момент, действующие на конце бурильной колонны. Где ma11, ma12, ma21 и ma22 представляют компоненты матрицы перехода секции (а) бурильной колонны, а mb11, mb12, mb21 и mb22 представляют компоненты матрицы перехода секции (b) бурильной колонны в соответствии с вышеприведенным уравнением (2).
Двухпортовая матрица перехода в спектральной области для секции (а) бурильной колонны может быть выражена как:

Двухпортовая матрица перехода в спектральной области для секции (b) бурильной колонны может быть выражена как:

Тогда двухпортовую матрицу перехода в спектральной области бурильной колонны в целом находят путем подстановки уравнения (11) в уравнение (10), что приводит к следующему уравнению:

Перемножение матриц дает следующее:

Следует отметить, что матрица перехода для бурильной колонны 12, состоящей из более чем двух секций, имеющих разные механические свойства и/или испытывающих разные трения, может быть рассчитана аналогичным образом.
Полная модель скважинного бурового оборудования 10, т.е. регулятора 20 скорости, приводной системы 15, бурильной колонны 12, КНБК 11 и бурового долота 17, может быть получена путем объединения представления (2) двухпортовой матрицы перехода в спектральной области бурильной колонны 12 и соответствующих представлений двухпортовых матриц перехода в спектральной области КНБК 11 и бурового долота 17, с одной стороны, и регулятора 20 скорости и приводной системы 15, с другой стороны.
Для КНБК 11 и бурового долота 17 двухпортовая матрица перехода в спектральной области, включающая трение, испытываемое КНБК 11 и буровым долотом 17, в целом, т.е. концентрированное, может быть выражена следующим образом:

где: Jbha = концентрированная инерция компоновки низа бурильной колонны
Ybha = концентрированное трение компоновки низа бурильной колонны
ωbit = скорость вращения долота
ωN = скорость вращения на нижнем конце бурильной колонны
Tbit = крутящий момент на буровом долоте
TN = крутящий момент на нижнем конце бурильной колонны
s = оператор преобразования Лапласа.
Двухпортовая матрица перехода в спектральной области для скорости вращения и крутящего момента на верхнем конце 14 бурильной  12, обеспечиваемых приводной системой 15, включая время задержки [с], вызванное регулятором 20 скорости, может быть выражена как:
12, обеспечиваемых приводной системой 15, включая время задержки [с], вызванное регулятором 20 скорости, может быть выражена как:

где: Jt = инерция верхнего привода
τd = время задержки регулятора скорости вращения
ωtd = полученная скорость вращения долота на верхнем конце бурильной колонны
ω1 = скорость вращения на верхнем конце бурильной колонны
Tref = задаваемый крутящий момент верхнего привода
T1 = крутящий момент на верхнем конце бурильной колонны
s = оператор преобразования Лапласа.
Подстановка уравнений (2) и (14) в уравнение (15) дает двухпортовую матрицу Mbh перехода в спектральной области скважинного бурового оборудования 10 в целом, т.е.:

где Mbh11(s), Mbh12(s), Mbh21(s) и Mbh22(s) являются спектральными компонентами матрицы Mbh перехода полного скважинного бурового оборудования 10, как указано выше, и представлены следующими уравнениями:
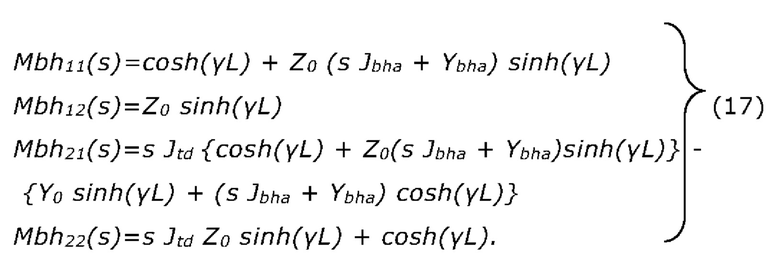
Применяя правила инверсии матриц к уравнению (16), получаем:

поскольку детерминант (Det) матрицы Mbh перехода полного скважинного бурового оборудования равен 1, т.е. Det (Mbh)=Mbh11(s)⋅Mbh22(s)-Mbh12(s)⋅Mbh21(s)=1. В записи уравнения (18) крутящий момент Tbit на долоте и скорость ωbit вращения долота на стороне забоя скважины образуют зависимые переменные, а задаваемый крутящий момент Tref нагрузки верхнего привода и скорость ωtd вращения верхнего привода на стороне верхнего конца образуют независимые переменные.
Следует отметить, что скорость ωbit вращения на нижнем конце бурильной колонны и крутящий момент Tbit на буровом долоте могут быть вычислены в спектральной области из уравнения (18) путем применения перемножения матриц, так что:

Для облегчения и/или ускорения вычислений можно упростить уравнения (19) и (20), например, за счет допущения, что концентрированное трение Ybha = 0 и Mbh11(s) = Mbh22(s).
Спектральные компоненты матрицы Mbh перехода полного скважинного бурового оборудования 10, как указано выше, являются частотно-зависимыми передаточными функциями. Для упрощения дальнейшего описания спектральные компоненты матрицы перехода записывают как Mbh11, Mbh12, Mbh21 и Mbh22.
Было обнаружено, что в практических системах выше частотного порога вследствие аппроксимаций и допущений, применяемых в соответствии с уравнениями (2)-(9), требование к инверсии матриц, Det (Mbh)=Mbh11⋅Mbh22-Mbh12⋅Mbh21=1, больше не встречается. Это имеет эффект повышения фаз компонентов Mbh11, Mbh12, Mbh21 и Mbh22 матрицы перехода выше этого частотного порога. Кроме того, для более высоких частот коэффициенты усиления компонентов матрицы перехода быстро увеличиваются вследствие ненулевой действительной части коэффициента распространения y в функциях

Для компенсации этих явлений компоненты Mbh11, Mbh12, Mbh21 и Mbh22 матрицы перехода модифицируют путем уменьшения их ширины спектральной полосы так, чтобы они включали в себя основную моду и ограниченное число спектральных мод более высокого порядка компонентов матрицы перехода, и путем добавления в спектральной области времени задержки для каждого из компонентов матрицы перехода, причем время задержки выбирают так, чтобы обеспечить причинно-следственное решение во временной области.
Предположим, что передаточная функция фильтра сужения полосы частот, т.е. фильтра нижних частот, в спектральной области  F(s), и что добавлено время задержки [с] для обеспечения причинно-следственного решения во временной области. Затем в спектральной области на основании уравнений (18) и (19) могут быть рассчитаны скорость ωbit вращения на нижнем конце бурильной колонны и крутящий момент Tbit на буровом долоте, с применением сужения полосы частот, т.е. ограничения или уменьшения спектральных мод более высокого порядка и операций задержки по времени, следующим образом:
F(s), и что добавлено время задержки [с] для обеспечения причинно-следственного решения во временной области. Затем в спектральной области на основании уравнений (18) и (19) могут быть рассчитаны скорость ωbit вращения на нижнем конце бурильной колонны и крутящий момент Tbit на буровом долоте, с применением сужения полосы частот, т.е. ограничения или уменьшения спектральных мод более высокого порядка и операций задержки по времени, следующим образом:

Во временной области ωbit и Tbit могут быть вычислены на основании обратного преобразования Лапласа уравнений (21) и (22) соответственно.
Уменьшение ширины спектральной полосы может быть получено с помощью любой подходящей функции фильтра и может быть основано, например, по меньшей мере на одном из демпфирующих свойств и длины бурильной колонны, так чтобы включать в расчет только спектральные моды более высокого порядка, имеющие спектральную плотность мощности выше выбранного значения, и/или максимальное количество спектральных мод более высокого порядка, например, 10 или предпочтительно до 20 или более предпочтительно до 30 спектральных мод выше основной моды, например.
В качестве функции F(s) фильтра нижних частот n-го порядка может быть использована операция фильтра Бесселя нижних частот, где n ≥ 4, предпочтительно n ≥ 10, более предпочтительно n ≥ 20, и сужение. Для облегчения вычисления эквивалентов во временной области предпочтительна постепенно уменьшающаяся сужающая или вырезающая функция, среди прочего включающая в себя косинус, ограниченную функцию Гаусса, вырезающую функцию Уэлча и Ланцоша или аналогичную функцию.
Применение функции фильтра и умножения задержек в вышеприведенных уравнениях (21) и (22) с F(s), записанным как F, приводит к следующим уравнениям:

и записывается в матричном виде в соответствии с уравнением (18):

где Mb11, Mb12, Mb21 и Mb22 представляют собой ограниченные по ширине полосы частот и модифицированные по времени задержки спектральные компоненты матрицы перехода для полного скважинного бурового оборудования, включая инерцию бурильной колонны, демпфирование стенки скважины, жесткость и демпфирование в материале, инерцию верхнего привода и инерцию компоновки низа бурильной колонны, в соответствии с:
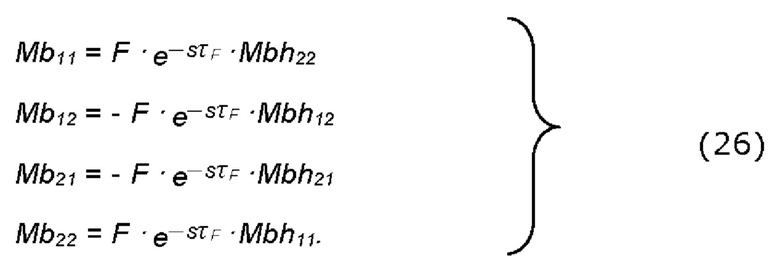
Уравнение (25) может быть записано в виде обобщенной вычислительной модели на основе двухпортовой матрицы перехода в спектральной области для вычисления скорости вращения на забое скважины и/или крутящего момента на забое скважины в любом положении х в скважине или вдоль бурильной колонны, как схематично показано стрелкой 44 на ФИГ. 3, в соответствии с:

где: М11(х), M12(x), M21(x) и М22(х) представляют собой ограниченные по ширине полосы частот и модифицированные по времени задержки спектральные компоненты матрицы перехода в конкретном положении x вдоль длины бурильной колонны,
ωdh = скорость вращения на забое скважины,
Tdh = крутящий момент на забое скважины,
ωtd = полученная скорость вращения верхнего привода,
Tref = задаваемый крутящий момент верхнего привода,
τd = время задержки регулятора скорости вращения, и
s = оператор преобразования Лапласа.
Предполагая однородный механический состав бурильной колонны и одинаковые демпфирующие или фрикционные характеристики по длине бурильной колонны, для заданного положения x [m] вдоль бурильной колонны или скважины, измеренного от фиксированного исходного положения, т.е. от верхнего конца бурильной колонны, соответствующие модифицированные компоненты матрицы перехода уравнения (27) могут быть получены из уравнений (2-9), так что:
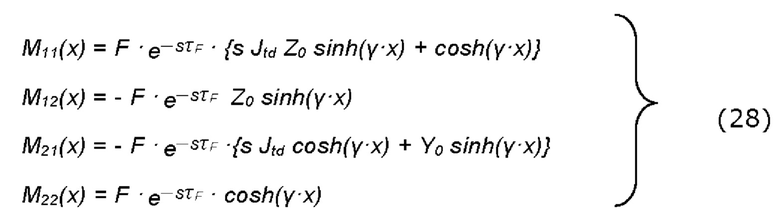
В случае неоднородной бурильной колонны и/или неоднородного или изменяющегося внутреннего и внешнего трения вдоль длины бурильной колонны, то же самое смоделировано с помощью составной матрицы перехода, как описано выше со ссылкой на уравнения (10-13).
Следует отметить, что в уравнении (28) модифицированные спектральные компоненты матрицы перехода являются спектральными передаточными функциями и могут быть записаны с полным обозначением как M11(x;s), M12(x;s), M21(x;s) и M22(x;s).
Во временной области скорость вращения на забое скважины и/или крутящий момент на забое скважины эффективно вычисляют в операции свертывания путем обработки полученных значений скорости вращения верхнего привода и крутящего момента верхнего привода и функций импульсного отклика модифицированных спектральных компонентов М11, М12, М21 и М22 матрицы перехода в течение периода времени, включающего время прохождения сигнала в прямом и обратном направлениях в бурильной колонне. То есть туда и обратно вдоль длины бурильной колонны.
Свертывание двух непрерывных функций g и h в конечном интервале времени [-t0, t0] обычно выражают следующим уравнением:

а для дискретных сигналов g' и h' для ряда выборок n во временной области в конечном интервале времени [-р0, р0]:
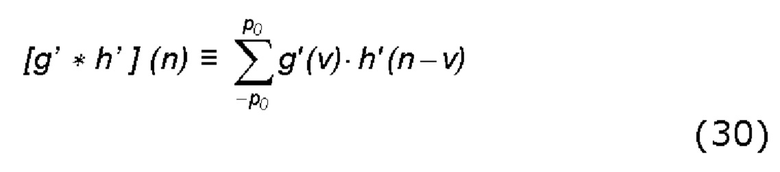
Функции импульсного отклика модифицированных спектральных компонентов М11, М12, М21 и М22 матрицы перехода рассчитывают по обратному преобразованию спектральной области во временную область и могут быть соответствующим образом синтезированы на основе имеющегося в продаже компьютерного программного обеспечения и должны охватывать только отрезок времени, по меньшей мере равный времени прохождения сигнала в прямом и обратном направлениях в бурильной колонне, которое на практике составляет несколько секунд.
Предположим, что функции импульсного отклика модифицированных спектральных компонентов M11(s), M12(s), M21(s) и M22(s) матрицы перехода выражены как H11(t), H12(t), H21(t) и H22(t) соответственно. Поскольку измеренные изменяющиеся во времени скорость ωtd(t) верхнего привода и задаваемый крутящий момент Tref(t) верхнего привода известны только из прошлого, изменяющаяся во времени скорость ωdh(t) на забое скважины и/или крутящий момент Tdh(t) на забое скважины скважинного бурового оборудования рассчитывают путем причинно-следственных операций свертывания, т.е. в конечном интервале времени, начинающемся от [-2t0, 0]:
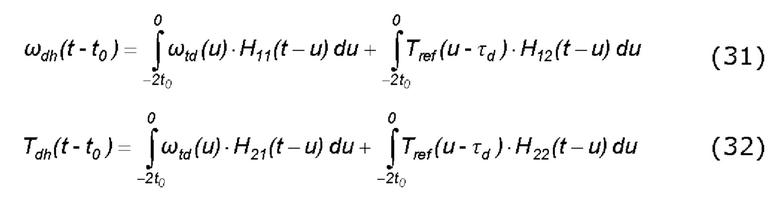
Из уравнений (31) и (32) видно, что общая задержка в расчетных величинах t0, т.е. в рассчитанной скорости вращения на забое скважины и крутящем моменте на забое скважины, составляет t0, что выражается как ωdh(t-t0) и Tdh(t-t0) соответственно. Операции (31) и (32) свертывания, которые на практике рассчитывают на основании дискретных сигналов, очень эффективны в вычислительном отношении в том смысле, что диапазон [-2t0, 0] может равняться периоду времени, включающему по меньшей мере время прохождения сигнала в прямом и обратном направлениях в бурильной колонне, в частности, периоду времени, который на долю больше, скажем, на 10-20% больше, чем время прохождения сигнала в прямом и обратном направлениях. Таким образом, минимальное значение t0 составляет время прохождения сигнала в одном направлении.
Для вычисления скорости вращения бурового долота и/или крутящего момента на буровом долоте нужно использовать синтезированные функции импульсного отклика модифицированных спектральных компонентов Mb11, Mb12, Mb21 и Mb22 матрицы перехода из уравнений (17) и (26), т.е. Hb11(t), Hb12(t), Hb21(t) и Hb22(t).
На ФИГ. 6а, 6b, 6с и 6d показаны примеры функций Hb11(t), Hb12(t), Hb21(t) и Hb22(t) импульсного отклика, включающие инерцию бурильной колонны, демпфирование стенки скважины, жесткость, демпфирование в материале, инерцию верхнего привода, инерцию компоновки низа бурильной колонны, трение долота и предполагающие равномерную прочность колонны и равномерное демпфирование, рассчитанные на основании системы испытания бурового оборудования методом моделирования, разработанной заявителем. Эта система испытания методом моделирования содержит приводной электродвигатель, действующий в качестве верхнего привода и управляемый регулятором скорости, и электрическую нагрузку, выполненную с возможностью регулирования и механически соединенную с приводным двигателем, которая моделирует бурильную колонну, КНБК и буровое долото.
В целях верификации использовалось испытательное оборудование для моделирования бурения скважины, имитирующее практическую операцию бурения с прихватыванием-проскальзыванием и применением управления, смягчающего последствия режима прихватывания-проскальзывания,
демонстрирующее следующие характеристики:
коэффициент распространения y = 3,1404 10-4 [1/м]
характеристический адмиттанс Y0 = 377,71 [Нмс/рад]
характеристический импеданс Z0 = 0,0026476 [рад/Нмс]
инерция верхнего привода Jtd = 1060 [кгм2]
концентрированная инерция компоновки низа бурильной колонны Jbha = 105,5 [кгм2]
концентрированное трение Ybha = 4,03 [Нмс/рад]
длина бурильной колонны L = 3804 [м]
удельное внешнее трение κ = 398,2 [Нс/м4]
удельное внутренне трение δ = 2,757 10-8 [Нс/м2]
Вычисления в соответствии с настоящим изобретением были выполнены с применением функции F сужающегося фильтра Бесселя 25-го порядка, имеющего ширину полосы нижних частот 5 Гц и с добавленным временем тF задержки 2 секунды.
На ФИГ. 6а, 6b, 6с и 6d время t - тF [с] представлено вдоль горизонтальной оси, т.е. графики 61-68 изображены смещенными с задержкой по времени в 2 с.
На ФИГ. 6а, 6b, 6с и 6d сплошные линии 61, 62, 63, 64 графиков показывают функции импульсного отклика за период времени t, рассчитанный для бурильной колонны, представленной моделью, состоящей из четырех сегментов или секций, в соответствии с моделью, представленной на ФИГ. 2. Пунктирные линии 65, 66, 67, 68 графиков представляют импульсные функции за период времени t, рассчитанный для модели бурильной колонны, состоящей из одного сегмента или секции, как показано на ФИГ. 3.
На ФИГ. 6а показана функция Hb11(t), 61, 65 импульсного отклика, которая безразмерна и представляет собой вклад скорости ωtd верхнего привода в скорость ωbit вращения бурового долота. На ФИГ. 6b показана функция Hb11(t) [рад/Нмс], 62, 66 импульсного отклика, которая представляет собой влияние задаваемого крутящего момента Tref верхнего привода на скорость ωbit вращения бурового долота. На ФИГ. 6 с показана функция Hb21(t) [Нмс/рад], 63, 67 импульсного отклика, которая представляет собой вклад скорости ωtd верхнего привода в крутящий момент Tbit на буровом долоте. На рисунке 6d показан переход от задаваемого крутящего момента Tref верхнего привода к крутящему моменту Tbit на долоте с помощью функции Hb22(t), 64, 68 импульсного отклика, которая также является безразмерной.
Из показанных функций импульсного отклика можно сделать вывод, что скорость ωtd верхнего привода и задаваемый крутящий момент Tref верхнего привода вносят вклад в скорость ωbit вращения бурового долота и крутящий момент Tbit на буровом долоте только в течение ограниченного периода времени от -1,5 с до 1,5 с, и что функции импульсного отклика равны нулю или по существу равны нулю за пределами этого периода времени. В частности, внутри диапазона времени от -1,5 до 1,5 с функции импульсного отклика также частично равны нулю или по существу равны нулю, т.е. в интервале примерно от -1 до 1 с. Соответственно, для относительно длинной однородной бурильной колонны операции свертывания должны выполняться только в очень ограниченном диапазоне.
Сплошной линией 73 на ФИГ. 7с графически изображена в течение выбранного периода t времени расчетная скорость ωbit вращения долота в оборотах в секунду [об/мин] на основании функций импульсного отклика четырехсегментной бурильной колонны, показанных на ФИГ. 6a-6d, и фактических значений скорости ωtd вращения верхнего привода и задаваемого крутящего момента Tref верхнего привода, измеренных в течение некоторого времени на основе моделируемой операции бурения, выполняемой испытательным оборудованием для моделирования бурения скважины, упомянутым выше в связи с ФИГ. 6a-6d. Пунктирной линией 74 изображена фактическая измеренная скорость вращения долота на испытательном оборудовании для моделирования.
Во время моделирования, в момент времени t = [с], в который начинается моделирование, применяют управление, смягчающее последствия режима прихватывания-проскальзывания, в соответствии со способом и устройством, раскрытыми в международной патентной заявке WO 2013/062409, поданной настоящим заявителем. Как показано на ФИГ. 7b, перед моментом времени t = [с] происходит прихватывание-проскальзывание, и скорость вращения бурового долота быстро колеблется в диапазоне от 0 до примерно 200 об/мин. С момента применения управления, смягчающего последствия режима прихватывания-проскальзывания, колебания скорости вращения бурового долота быстро уменьшаются, как показано на ФИГ. 7b с момента времени t = [с].
График 71, показанный на ФИГ. 7b, иллюстрирует расчетный вклад, вносимый скоростью ωtd вращения верхнего привода в скорость ωbit вращения бурового долота, а график 72 на ФИГ. 7с показывает, как задаваемый крутящий момент Tref верхнего привода вносит вклад в скорость ωbit бурового долота в течение периода времени t, причем оба графика основаны на функциях импульсного отклика четырехсегментной бурильной колонны, показанных на ФИГ. 6a-6d. График 73 представляет собой сумму двух графиков 71 и 72.
Следует отметить точность расчетной скорости вращения долота в соответствии с настоящим изобретением и измеренных значений. В этой связи на ФИГ. 8 представлено увеличенное графическое изображение, иллюстрирующее фактическое измеренное значение скорости вращения долота, во временном интервале непосредственно на увеличенной временной шкале до и непосредственно после применения управления, смягчающего последствия режима прихватывания-проскальзывания, при t = [с]. График 74 в виде пунктирной линии представляет фактическую измеренную скорость вращения долота при моделировании, а график 73 в виде сплошной линии представляет скорость долота, рассчитанную в соответствии с настоящим изобретением на основе модели бурильной колонны, содержащей четыре сегмента. График 75 в виде штрих-пунктирной линии показывает скорость вращения долота, рассчитанную на основе модели бурильной колонны, содержащей один сегмент, на основании операции бурильной колонны, смоделированной, как упомянуто со ссылкой на ФИГ. 6a-6d.
Вычислительная модель бурильной колонны как с четырьмя сегментами, так и с одним сегментом обеспечивает одинаковую тенденцию изменения скорости вращения долота с течением времени в соответствии с измеренными значениями на основании системы испытания методом моделирования.
Вклады скорости ωtd вращения верхнего привода и задаваемого крутящего момента Tref верхнего привода в крутящий момент Tbit на долоте, рассчитанные в соответствии с настоящим изобретением для данных измерений, полученных на основании моделирования скважинного бурового оборудования, упомянутого выше со ссылкой на ФИГ. 6 и 7, графически изображены на ФИГ. 9а, 9b и 9с. График 76 на ФИГ. 9а изображает вклад скорости ωtd верхнего привода, а график 77 на ФИГ. 9b изображает вклад задаваемого крутящего момента Tref, оба в течение выбранного периода времени t, включая применение управления, смягчающего последствия режима прихватывания-проскальзывания от t = [с].
Рассчитанный крутящий момент на долоте, показанный на ФИГ. 9с, представляет собой сумму вкладов, показанных на ФИГ. 9а и 9b. График 79 на ФИГ. 9d показывает измеренный крутящий момент Tbit на долоте. Для сравнения измеренный крутящий момент на долоте отображен с поправкой на время тF задержки в 2 секунды, используемое при расчете крутящего момента на долоте. Разница в значениях крутящего момента на графиках 78 и 79 является результатом кулоновского трения, то есть постоянного значения крутящего момента, которое не учитывается в выполненных расчетах. Когда нужно учитывать кулоновское трение, оно может быть расценено как фиксированное значение, обычно равное нескольким Нм/метр или нескольким кНм/километр, для отрезка бурильной колонны и может быть добавлено к внешнему трению, связанному с буровым раствором. В настоящем примере кулоновское трение составляет 7,2 кНм. Следует отметить точность и динамику рассчитанного значения крутящего момента на долоте.
Графики на ФИГ. 7с и 9с показывают скорость вращения долота и крутящий момент на долоте. Однако, как объяснено выше, в каждом положении в скважине, то есть вдоль бурильной колонны, скорость ωdh(t) вращения на забое скважины и крутящий момент Tdh(t) на забое скважины могут быть вычислены в соответствии с настоящим изобретением на основании синтеза соответствующих функций H11(t), H12(t), H21(t), H22(t) импульсного отклика модифицированных спектральных компонентов M11(s), M12(s), M21(s) и M22(s) матрицы перехода.
Положения каждый раз ссылаются на заданную фиксированную точку скважинного бурового оборудования, такую как плоскость земной поверхности, в которой бурят скважину, или другое фиксированное исходное положение, такое как верхний конец бурильной колонны. Функции импульсного отклика для конкретного положения могут быть рассчитаны заранее, т.е. на первом этапе обработки, в то время как соответствующие операции свертывания выполняют на втором этапе обработки после получения значений скорости вращения верхнего привода и крутящего момента верхнего привода.
Скорость вращения на забое скважины и крутящий момент на забое скважины для множества положений могут быть графически представлены при бурении на отображающем устройстве как на двухмерной (2D), так и на трехмерной или пространственной (3D) диаграмме в виде функции времени и положения.
На ФИГ. 10а и 10b на двухмерной диаграмме показана расчетная скорость вращения в скважине как функция положения x в скважине, т.е. вдоль бурильной колонны, в конкретное время t и в четырех моментах времени ранее, каждый с разницей в 0,5 секунды, как указано в условных обозначениях графиков. На ФИГ. 10а показана скорость вращения на забое скважины в момент времени t = 1811,5 с, то есть до применения управления, смягчающего последствия режима прихватывания-проскальзывания, в момент времени t = 1840 с. На ФИГ. 10b показана скорость вращения на забое скважины в момент времени t = 1862 с, то есть после применения управления, смягчающего последствия режима прихватывания-проскальзывания, в момент времени t = 1840 с. В верхней части графиков указана мгновенная скорость вращения верхнего привода, т.е. скорость в момент времени t = 1811,5 с и t = 1840 с, соответственно.
На трехмерной диаграмме, представленной на ФИГ. 11, показана скорость вращения на забое скважины как функция расстояния x в скважине в течение интервала времени t, включающего в себя применение управления, смягчающего последствия режима прихватывания-проскальзывания, в момент времени t = 1840 с, рассчитанная, т.е. вычисленная в соответствии с настоящим изобретением на основании измеренных данных на верхнем конце, полученных посредством системы испытания методом моделирования. На ФИГ. 12 показан крутящий момент на забое скважины как функция расстояния x в скважине в течение интервала времени t, включающего в себя применение управления, смягчающего последствия режима прихватывания-проскальзывания, в момент времени t = 1840 с, рассчитанный/вычисленный в соответствии с настоящим изобретением на основании измеренных данных на верхнем конце, полученных посредством системы испытания методом моделирования.
Следует отметить, что такая диаграмма волнового спектра скорости вращения и/или крутящего момента на забое скважины, показанная на ФИГ. 10а, 10b, 11 и 12, может отображаться почти в реальном времени на дисплее пульта управления оператора или тому подобном либо на площадке, либо на расстоянии от площадки таким образом, чтобы непрерывно контролировать скорость вращения и крутящий момент, действующие на бурильную колонну и буровое долото.
Следует понимать, что способ, предложенный в соответствии с настоящим изобретением, не только способен показывать и обнаруживать прихватывание-проскальзывание долота, но также может обнаруживать прихватывание-проскальзывание вдоль бурильной колонны, в том числе прихватывание-проскальзывание с модами более высокого порядка.
Как указано в разделе «Раскрытие сущности изобретения», соответствующие механические параметры и эксплуатационные параметры геометрии колонны для вычисления компонентов матрицы перехода могут быть получены вручную и/или в цифровом виде под управлением оператора из сравнительной таблицы технических характеристик или другой подобной таблицы. В более сложной реализации способ может быть выполнен полностью автоматически и автономно, когда начинается бурение, без вмешательства оператора или другого квалифицированного персонала, посредством получения соответствующих механических параметров и эксплуатационных параметров геометрии колонны на основании применения положений международной патентной заявки WO 2014/098598, поданной настоящим заявителем, путем подачи на задаваемый крутящий момент Tref верхнего привода изменяющегося во времени сигнала управления крутящим моментом, такого как входной сигнал Tsweep, показанный на ФИГ. 2 пунктирной стрелкой 42, и операции 41 суммирования на входе передаточной функции D(s) 30 и обработки полученной скорости вращения верхнего привода в системе 87 управления эксплуатационными параметрами, сконфигурированной соответствующим образом, см. ФИГ. 14.
На представленной на ФИГ. 13 упрощенной структурной схеме 50 изображены этапы, подлежащие обработке цифровым процессором, компьютером или другим устройством обработки данных для оценки по меньшей мере одного из скорости вращения на забое скважины и/или крутящего момента на забое скважины в соответствии с примером настоящего изобретения и для представления того же самого, например, путем отображения или иного использования таких оценок с целью бурения скважины в породной формации. Направление потока информации предполагается сверху вниз. Другие направления обозначены соответствующей стрелкой.
В качестве первого этапа выбирают подходящую вычислительную модель, представляющую динамическую часть, включающую демпфирование и трение скважинного бурильного оборудования 10, которое состоит из приводной системы или верхнего привода 15, бурильной колонны 12 и КНБК 11, т.е. блок 51 «Выбор вычислительной модели на основе двухпортовой матрицы перехода в спектральной области для скважинного бурильного оборудования», так что скорость вращения на забое скважины и крутящий момент на забое скважины являются зависимыми переменными, а скорость вращения верхнего привода и крутящий момент верхнего привода являются независимыми переменными. В общем, один раз выбирают эту вычислительную модель, такую как модель линии передачи, описанная выше со ссылкой на ФИГ. 4 и 5.
Затем, как показано в блоке 52 «Получение компонентов матрицы перехода выбранной вычислительной модели», для определенного расстояния в скважине или конкретной длины вдоль бурильной колонны получают значения компонентов матрицы перехода на основании механических свойств бурильной колонны 12, верхнего привода 15 и КНБК 11, включая значения трения и демпфирования, например, как описано выше со ссылкой на модель линии передачи и уравнения 2-9, 17 и 18.
Полученные таким образом компоненты матрицы перехода модифицируют, чтобы допускать уменьшенное число спектральных мод более высокого порядка в компонентах матрицы перехода помимо основной моды. Кроме того, добавляют время задержки к каждому компоненту матрицы перехода в спектральной области для обеспечения возможности причинно-следственных решений во временной области. Это показано в блоке 53 «Модификация компонентов матрицы перехода путем уменьшения ширины спектральной полосы таким образом, чтобы она включала основную моду и ограниченное число спектральных мод более высокого порядка, и добавление времени задержки для каждого из спектральных компонентов матрицы перехода». Ссылка сделана на спектральные компоненты M11(s), M12(s), M21(s), M22(s) и Mb11(s), Mb12(s), Mb21(s), Mb22(s) матрицы перехода, подробно описанные выше.
При бурении с определенной частотой выборки, которая должна быть выбрана, например, в диапазоне от 4 до 20 мс, получают значения скорости вращения верхнего привода, например, измеренной датчиком 21 скорости, одновременно со значением крутящего момента верхнего привода, т.е. блок 54 «Получение значений скорости вращения верхнего привода и крутящего момента верхнего привода при бурении». Однако может быть использована любая другая подходящая методика или оборудование для измерения скорости вращения, например, бездатчиковая оценка скорости вращения верхнего привода по напряжению и току, подаваемым на электродвигатель 18 приводной системы. Как описано выше, крутящий момент верхнего привода может быть представлен задаваемой величиной Tref, крутящего момента верхнего привода.
Затем вычисляют скорость вращения на забое скважины и/или скорость вращения долота и крутящий момент на забое скважины и/или крутящий момент на долоте во временной области, как показано в блоке 55 «Вычисление скорости вращения на забое скважины и/или крутящего момента на забое скважины во временной области на основании причинно-следственных операций свертывания в отношении полученных значений скорости вращения верхнего привода и крутящего момента верхнего привода и импульсных откликов модифицированных компонентов матрицы перехода». Импульсные отклики получают путем обратного преобразования спектральной области во временную область, которое может быть выполнено, например, при помощи компьютера с использованием алгоритма обратного быстрого преобразования Фурье, ОБПФ. Вычисление скорости вращения на забое скважины и/или скорости вращения долота и/или крутящего момента на забое скважины и/или крутящего момента на долоте на основании операции свертывания выгодно ввиду короткого диапазона, на который влияют функции импульсного отклика компонентов матрицы.
Вычисленные таким образом скорости и крутящие моменты могут быть представлены почти в реальном времени бурильщику, руководителю или другому лицу, например, путем отображения вышеперечисленного, и/или записаны для дальнейшего анализа, т.е. блок 56 «Отображение вычисленных значений скорости вращения на забое скважины и/или крутящего момента на забое скважины для множества положений в скважине при бурении».
Когда в ходе операции бурения, например, длина бурильной колонны 12 увеличивается, или среда бурения существенно изменяется, блок 57 принятия решения «Изменилась ли среда бурения/оборудование для бурения?» дает результат «Да», то процесс, представленный в блоках 52-56 повторяют для получения скорректированных компонентов матрицы перехода, если это применимо. Иначе, в случае перехода к блоку 59 принятия решения «Нет», вычисление и представление скорости вращения на забое скважины и/или крутящего момента на забое скважины продолжается на основании полученных значений скорости вращения и крутящего момента верхнего привода.
Следует понимать, что инерцию Jtd приводной системы 15 и инерцию Jbha компоновки 11 низа бурильной колонны не нужно устанавливать заново каждый раз при выдвижении бурильной колонны. Инерция Jtd приводной системы может быть также известна заранее, например, на основании данных, предоставляемых оператором скважинного бурового оборудования, что значительно облегчает процесс. Скорректированные компоненты матрицы перехода могут быть получены, как описано выше.
Как указано выше в разделе «Раскрытие сущности изобретения», для вычисления компонентов матрицы перехода выбранной вычислительной модели и их эквивалентов во временной области, а также функций импульсного отклика, выполнения преобразований в спектральной области и обратных или спектральных преобразований во временную область, операций с матрицами, операций свертывания и операций фильтрации компьютер может быть оснащен имеющимся в продаже компьютерным программным обеспечением, таким как MATLAB™, или любой другой имеющейся в продаже компьютерной программой для вычисления преобразований спектральной области и обратных преобразований передаточных функций и функций импульсного отклика динамической системы, операций с матрицами, операций свертывания и операций фильтрации, а также оригинальным программным обеспечением, написанным, например, на С, C+ или C++.
На ФИГ. 14 схематично показано устройство 80 для автоматической оценки скорости вращения на забое скважины и/или крутящего момента на забое скважины для скважинного бурового оборудования 10, работающего либо на забое скважины, либо выше забоя скважины при бурении скважины. В дополнение к скважинному буровому оборудованию 10, показанному на ФИГ. 1, предлагается управляемая компьютером система 81 наблюдения за операцией бурения. Система 81 наблюдения содержит компьютер или электронное обрабатывающее устройство 82, интерфейс 83 ввода, такой как клавиатура, сенсорный экран и т.п., для выбора репрезентативной вычислительной модели на основе двухпортовой матрицы перехода в спектральной области для скважинного бурового оборудования 10 и/или для ввода значений рабочих параметров, таких как параметры настройки регулятора 20 скорости, если таковой имеется, скважинного бурового оборудования 10 для определения компонентов матрицы перехода вычислительной модели. Значения скорости вращения и крутящего момента, вычисленные обрабатывающим устройством 82, могут быть представлены в выходном интерфейсе 84, таком как графический дисплей, принтер или плоттер или модуль оценки данных для оценки полученных результатов.
Вычислительная модель, рабочие параметры и параметры настройки, функции фильтра, время задержки и другие значения в соответствии с настоящим изобретением, используемые системой 81 наблюдения, могут храниться в базе 85 данных, к которой у системы 81 наблюдения есть доступ, и извлекаться из нее. База 85 данных может быть удалена от системы 81 наблюдения и соединена с ней, например, посредством сети 86 передачи данных, или может состоять из носителя, включающего в себя кратковременный и некратковременный носитель, который может быть считан компьютером или обрабатывающим устройством 82.
Скорость вращения верхнего конца бурильной колонны 12, например, измеренная на ее верхнем конце 14 индикатором скорости или датчиком 21 скорости, подают через вход 89 на обрабатывающее устройство 82. Крутящий момент верхнего привода может быть получен от регулятора 20 скорости через ввод/вывод 88 данных для подачи параметров настройки и/или обратной связи на систему 81 наблюдения.
Обрабатывающее устройство 82 запрограммировано или может быть запрограммировано при помощи компьютерного программного продукта, имеющего носитель, хранящий компьютерный программный код, который может быть считан обрабатывающим устройством 82, для вычисления расчетной скорости вращения на забое скважины и/или крутящего момента на забое скважины на основании полученных значений скорости вращения верхнего привода и крутящего момента верхнего привода в соответствии с настоящим изобретением. Кроме того, обрабатывающее устройство 82 может быть выполнено с возможностью автоматического и автономного функционирования для получения значений эксплуатационных параметров, необходимых для вычисления компонентов матрицы перехода, посредством реализации системы управления эксплуатационными параметрами в соответствии с патентной заявкой WO 2014/098598, поданной настоящим заявителем, которая включена в настоящую заявку посредством ссылки и схематически обозначена ссылочной позицией 87.
Система 81 наблюдения может быть расположена на удалении от бурового оборудования 10, так что соединения 88, 89 с регулятором 20 скорости могут быть выполнены в виде единого сетевого соединения передачи данных или соединения с телекоммуникационной сетью, проводной или беспроводной.
Регулятор 20 скорости и/или отдельный электронный контроллер и/или система 81 могут быть дополнительно выполнены с возможностью применения управления, смягчающего последствия режима прихватывания-проскальзывания, раскрытого в международной патентной заявке WO 2013/062409, поданной настоящим заявителем, которая включена в настоящую заявку посредством ссылки.
Настоящее изобретение и описание не ограничены вариантами осуществления, раскрытыми выше, и могут быть модифицированы и расширены специалистами в данной области в пределах объема настоящего изобретения, раскрытого в прилагаемой формуле изобретения, без необходимости применения изобретательских навыков.
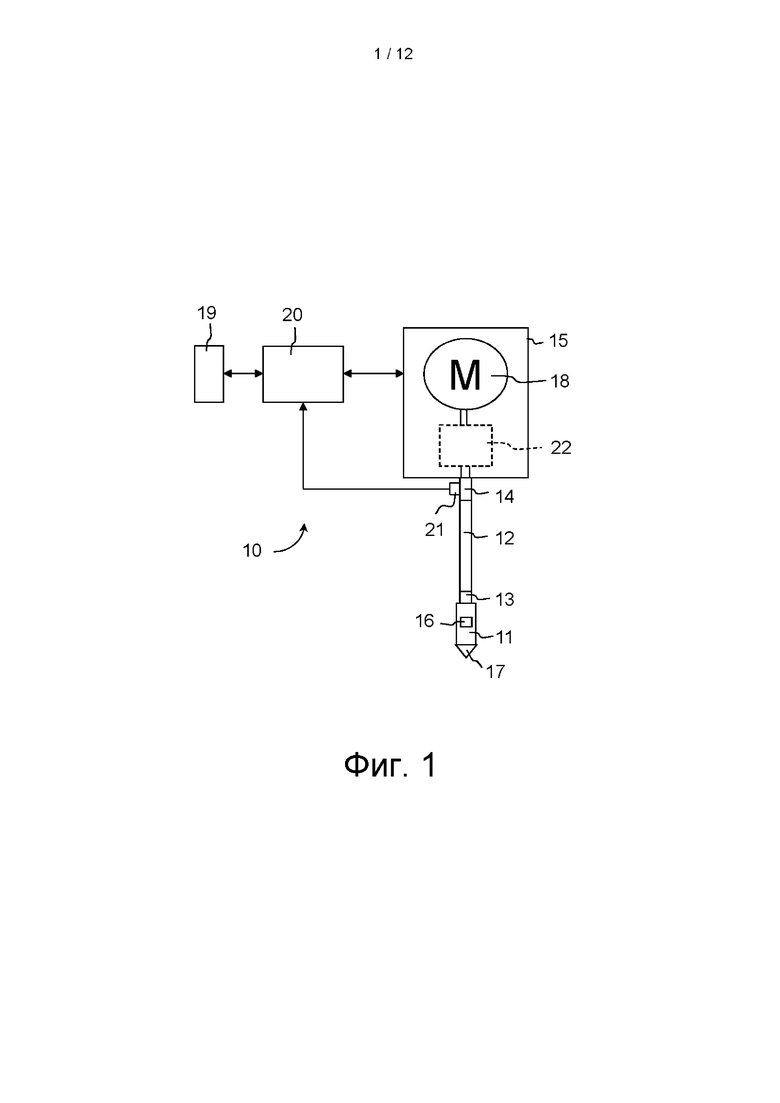
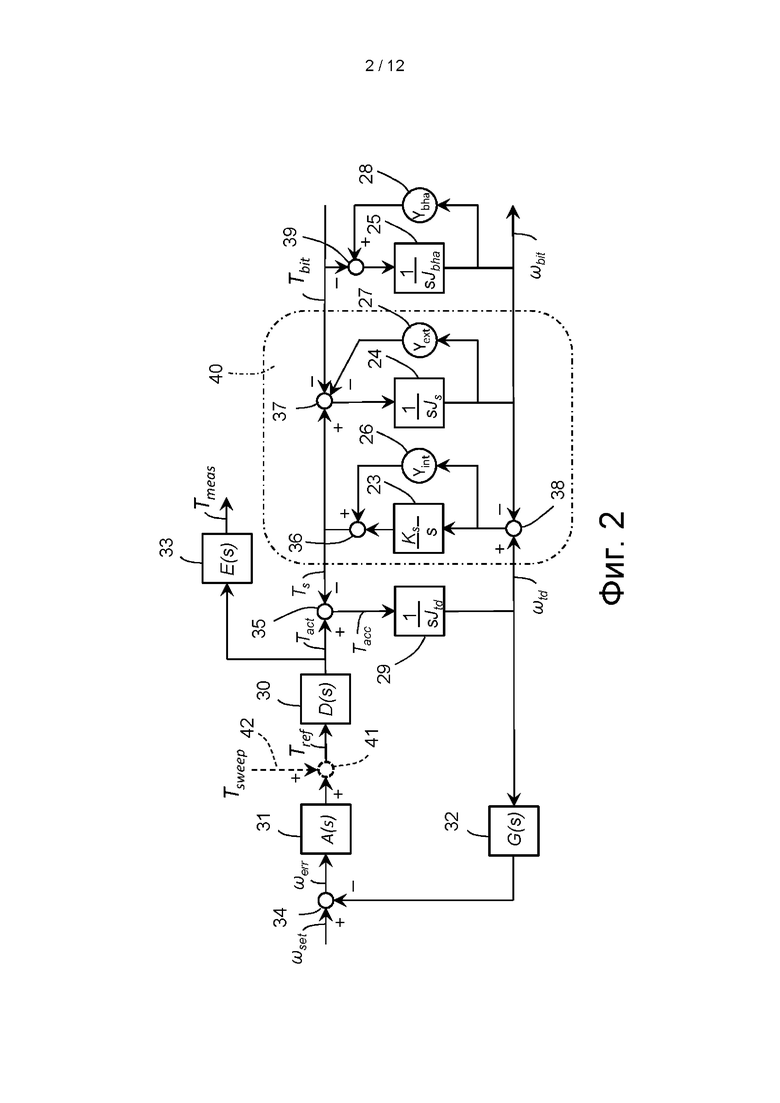
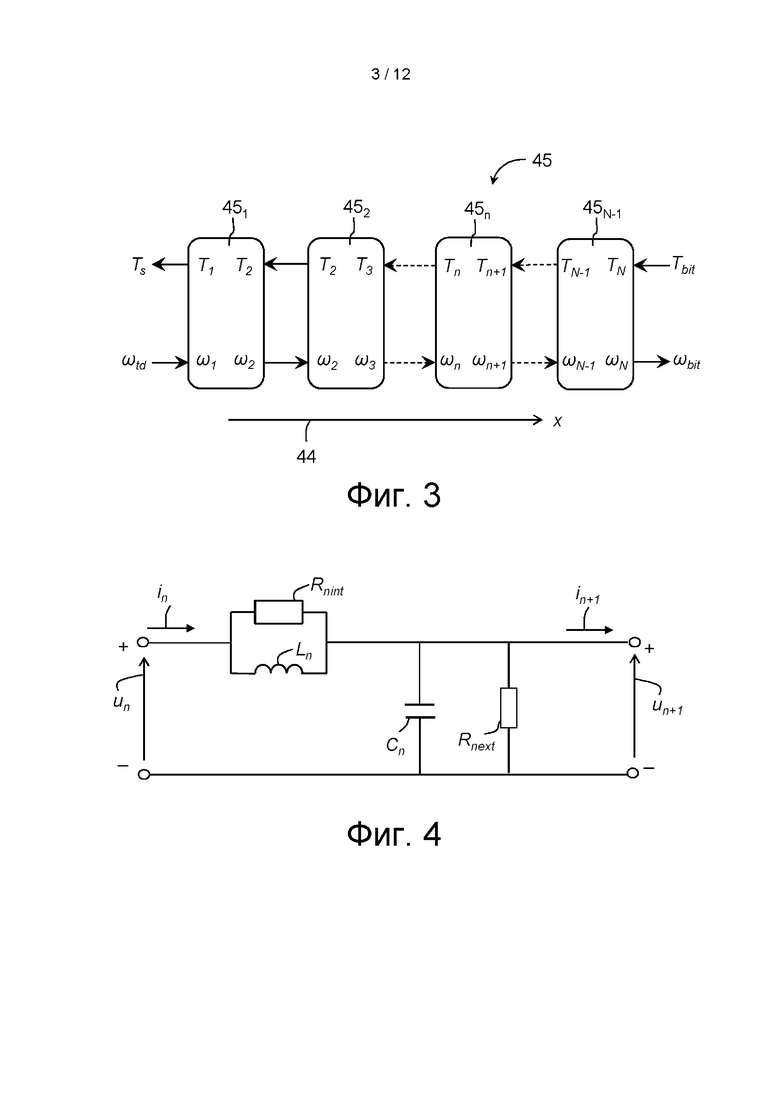
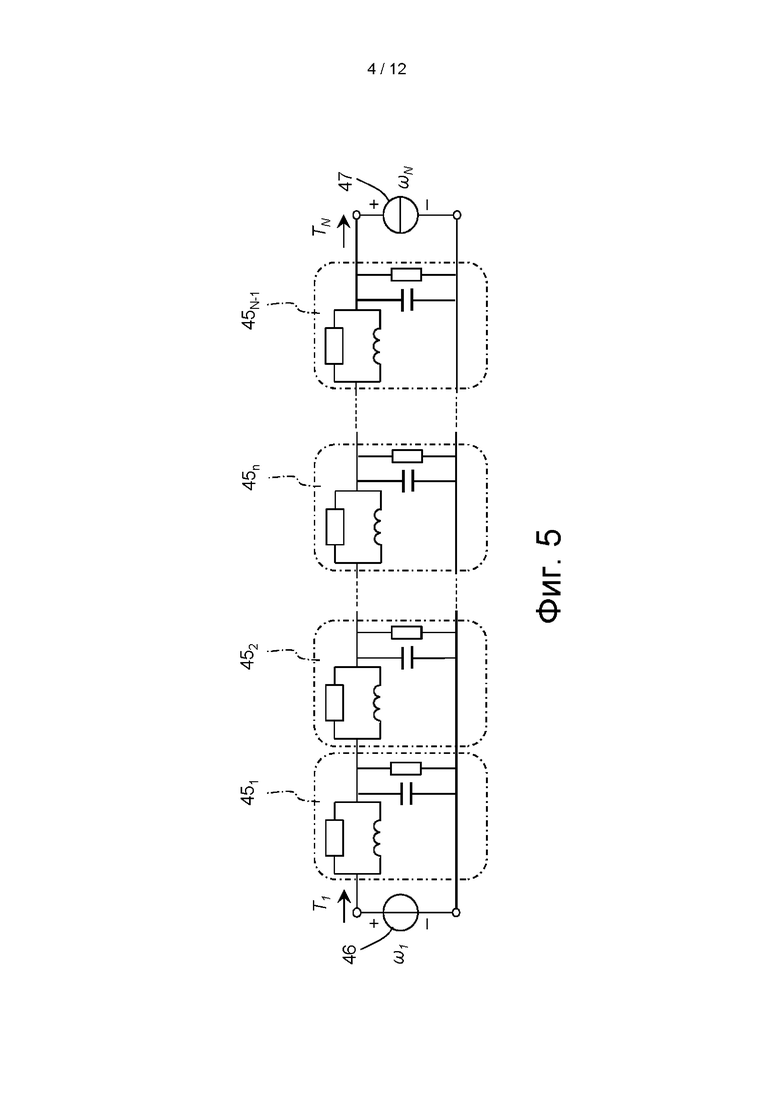
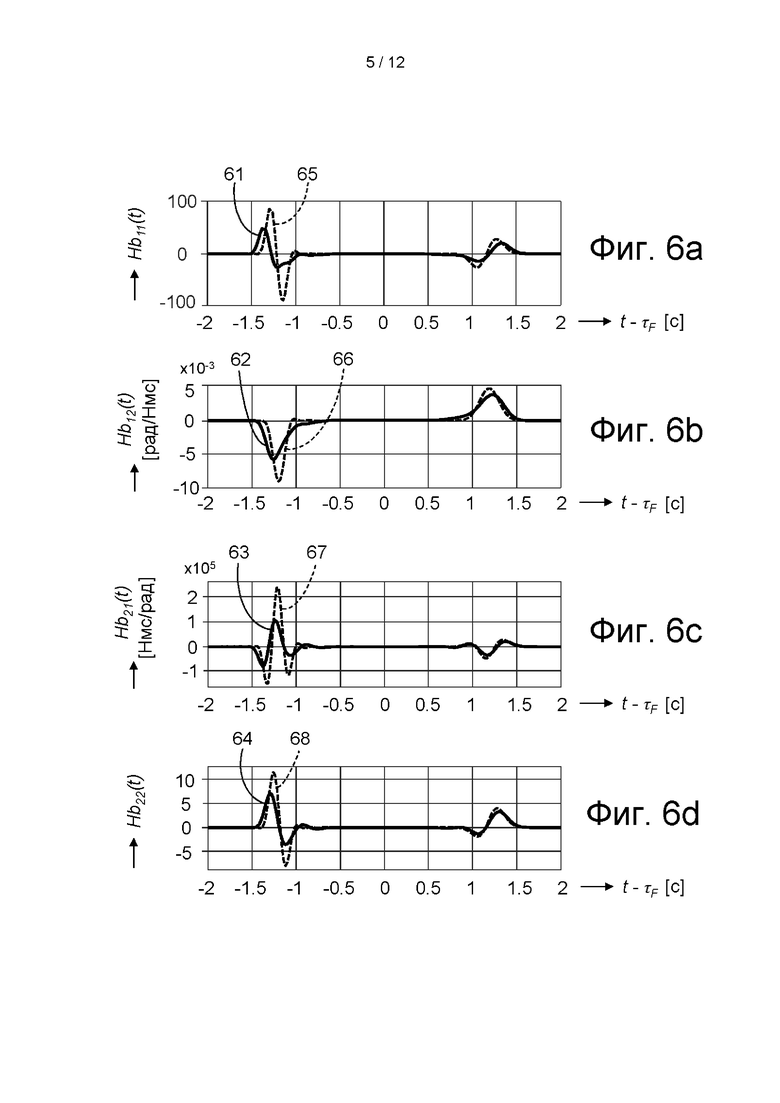
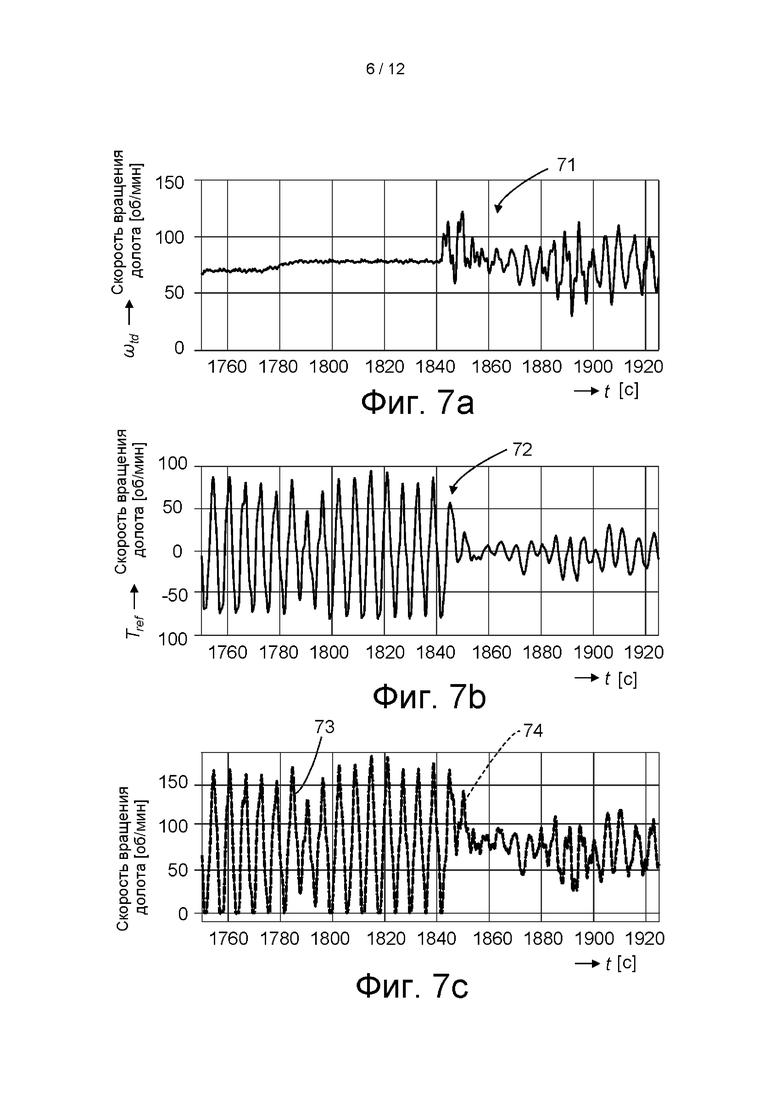
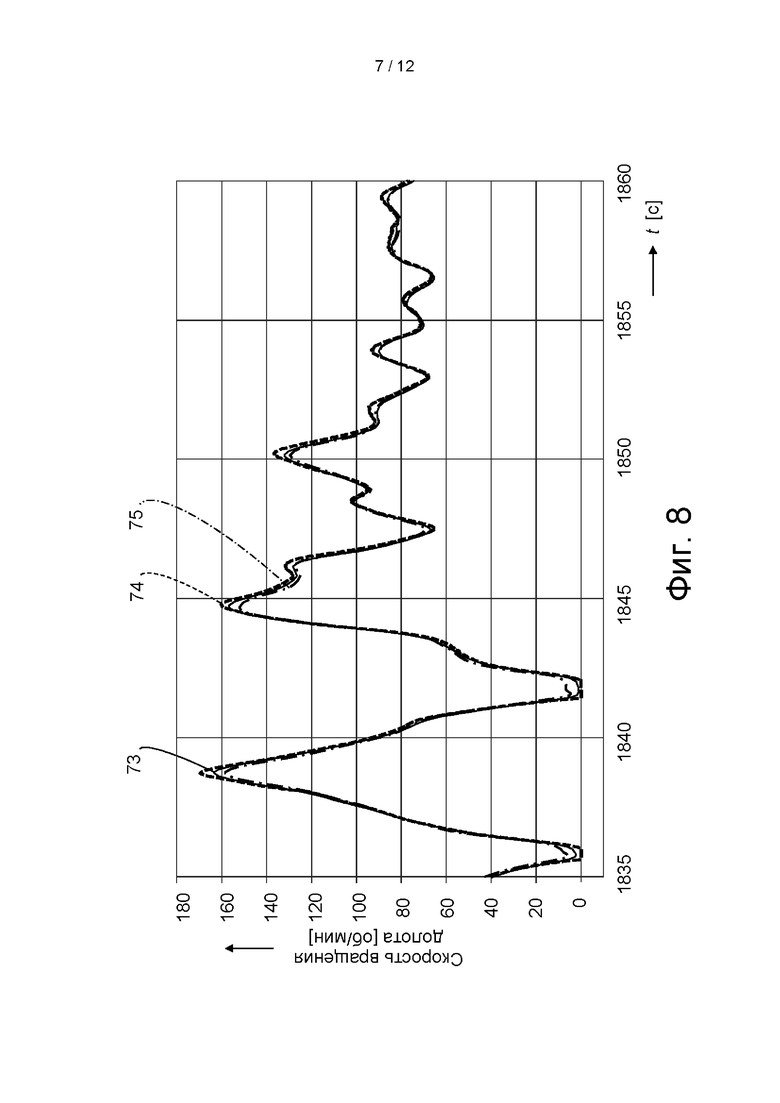
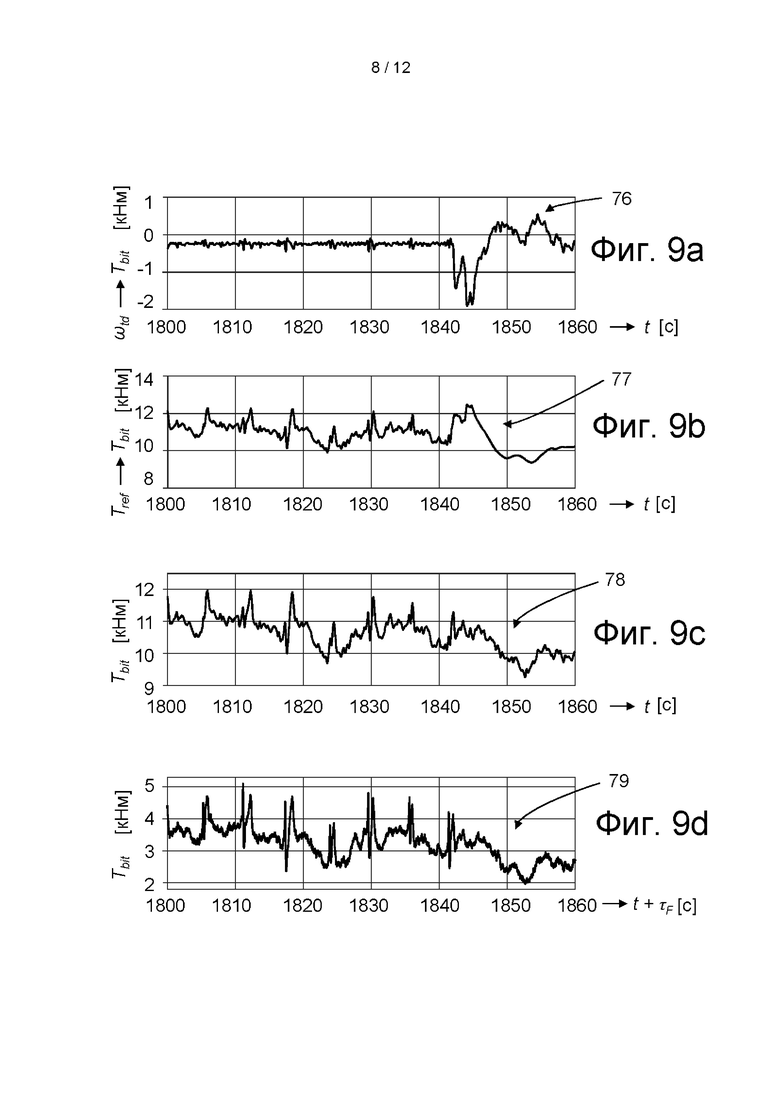
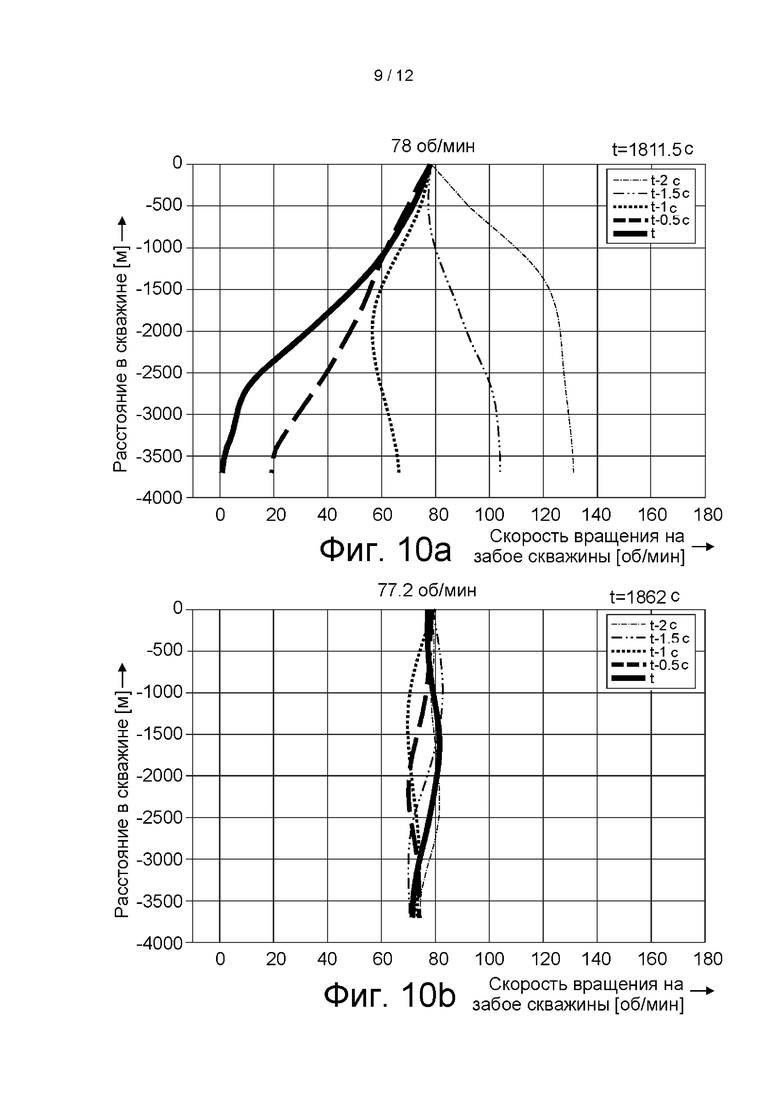
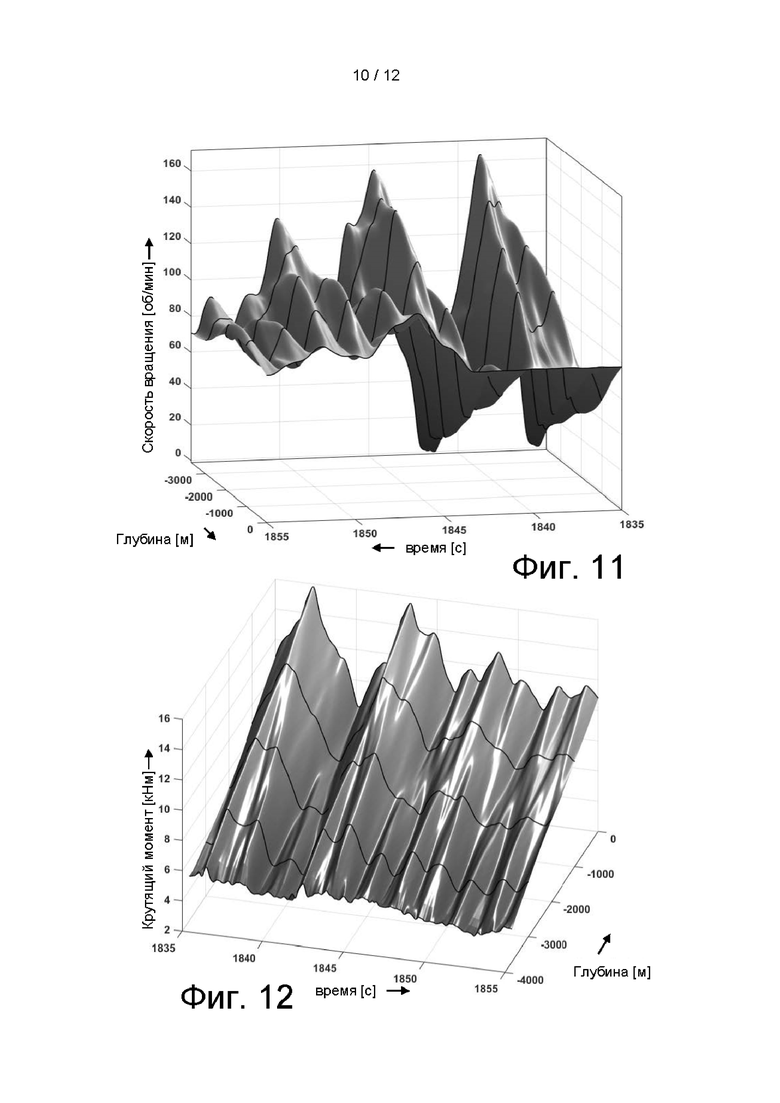
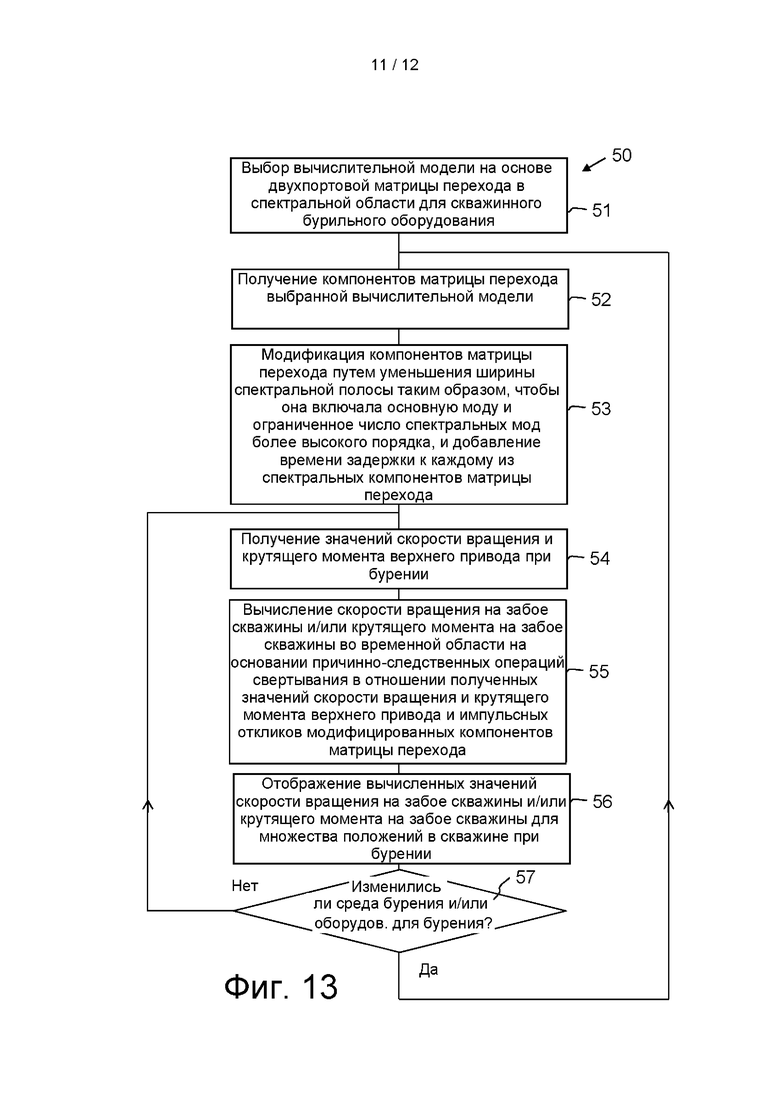
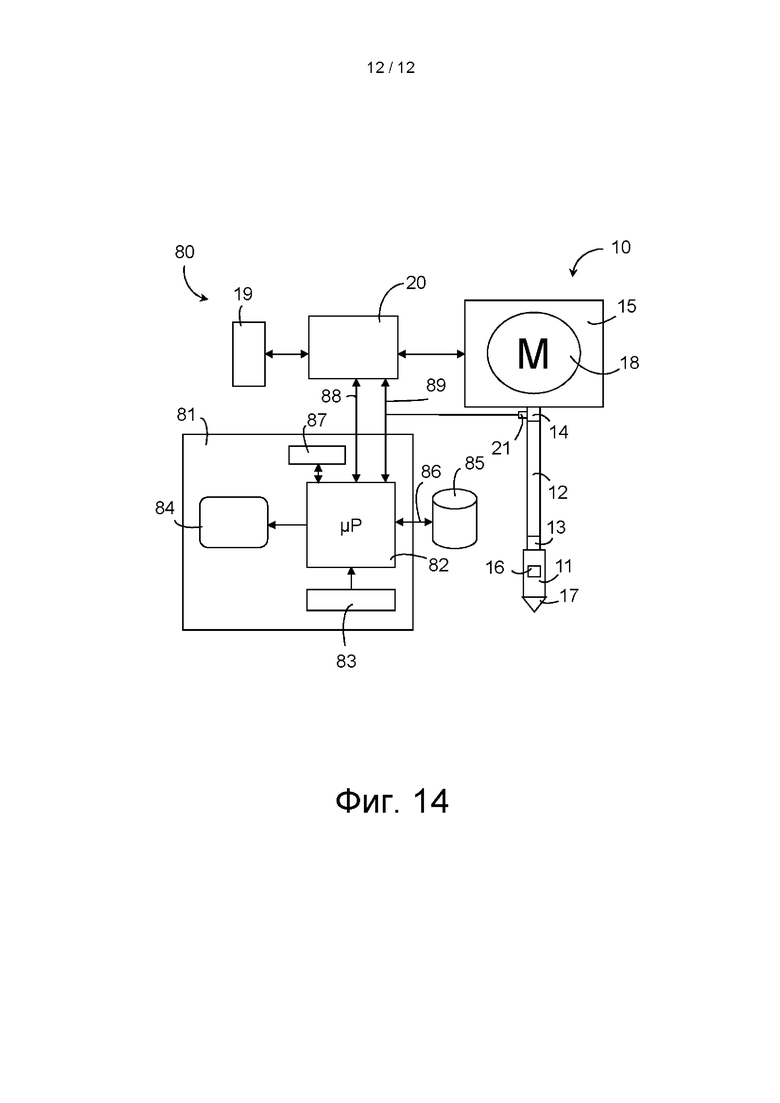
Предложены способ и устройство, скважинное буровое оборудование и машиночитаемый носитель для оценки по меньшей мере одного из скорости вращения на забое скважины и крутящего момента на забое скважины для скважинного бурового оборудования при бурении скважины в породной формации. Скважинное оборудование содержит вращательную приводную систему, бурильную колонну, компоновку низа бурильной колонны, содержащую буровое долото, верхний конец, соединенный с вращательной приводной системой, и регулятор скорости, выполненный с возможностью управления скоростью вращения верхнего привода путем управления его крутящим моментом. Предложенный способ осуществляют на компьютере на основании вычислительной модели на основе двухпортовой матрицы перехода в спектральной области скважинного бурового оборудования. При бурении получают (54) значения скорости вращения и крутящего момента верхнего привода и вычисляют (55) скорость вращения и крутящий момент на забое скважины путем уменьшения ширины спектральной полосы и применения временной задержки к вычислениям, что обеспечивает причинно-следственное решение во временной области. 4 н. и 14 з.п. ф-лы, 14 ил.
1. Способ оценки по меньшей мере одного из скорости вращения на забое скважины и крутящего момента на забое скважины для скважинного бурового оборудования при бурении скважины в породной формации,
причем скважинное буровое оборудование содержит вращательную приводную систему, бурильную колонну, которая имеет компоновку низа бурильной колонны, содержащую буровое долото, верхний конец, соединенный с вращательной приводной системой, и регулятор скорости, выполненный с возможностью управления скоростью вращения верхнего привода путем управления крутящим моментом верхнего привода, при этом указанный способ, осуществляемый на компьютере, включает следующие этапы:
- получение компонентов матрицы перехода вычислительной модели на основе двухпортовой матрицы перехода в спектральной области для скважинного бурового оборудования,
причем вычислительная модель включает демпфирующие свойства скважинного бурового оборудования, скорость вращения на забое скважины и крутящий момент на забое скважины являются зависимыми переменными, а скорость вращения и крутящий момент верхнего привода являются независимыми переменными;
- получение скорости вращения и крутящего момента верхнего привода при бурении; и
- вычисление по меньшей мере одного из скорости вращения на забое скважины и крутящего момента на забое скважины для скважинного бурового оборудования с использованием полученных компонентов матрицы перехода, скорости вращения верхнего привода и крутящего момента верхнего привода,
причем указанный этап вычисления включает:
- уменьшение ширины спектральной полосы для указанного вычисления, причем уменьшенная ширина полосы выбрана таким образом, что она включает в указанном вычислении ограниченное количество спектральных мод более высокого порядка,
- применение, в спектральной области, времени задержки к указанному вычислению, причем время задержки выбрано таким образом, что оно обеспечивает причинно-следственное решение во временной области, и
- вычисление по меньшей мере одного из скорости вращения на забое скважины и крутящего момента на забое скважины для скважинного бурового оборудования с использованием примененных уменьшенной ширины спектральной полосы и добавленного времени задержки.
2. Способ по п. 1, согласно которому уменьшение ширины спектральной полосы и время задержки применяют путем модификации компонентов матрицы перехода путем:
- уменьшения ширины спектральной полосы компонентов матрицы перехода, причем уменьшенная ширина полосы выбрана таким образом, что она включает ограниченное количество спектральных мод более высокого порядка в компонентах матрицы перехода,
- добавления в спектральной области временной задержки к каждому из компонентов матрицы перехода, причем время задержки выбрано таким образом, что оно обеспечивает причинно-следственное решение во временной области, и
- вычисления по меньшей мере одного из скорости вращения на забое скважины и крутящего момента на забое скважины для скважинного бурового оборудования с использованием модифицированных компонентов матрицы перехода.
3. Способ по п. 2, согласно которому по меньшей мере одно из скорости вращения на забое скважины и крутящего момента на забое скважины обеспечивают, посредством указанного компьютера, для множества различных положений вдоль длины бурильной колонны или вдоль ствола скважины путем вычисления для каждого положения функций импульсного отклика модифицированных компонентов передаточной функции матрицы перехода и путем обработки в причинно-следственной операции свертывания с использованием каждой из вычисленных функций импульсного отклика для соответствующего положения и полученных значений скорости вращения верхнего привода и крутящего момента верхнего привода, а также по меньшей мере одного из скорости вращения на забое скважины и крутящего момента на забое скважины в соответствующем положении.
4. Способ по п. 3, согласно которому по меньшей мере одно из скорости вращения на забое скважины и крутящего момента на забое скважины, обеспеченных для указанного множества положений, графически представляют при бурении на отображающем устройстве на пространственной графической диаграмме в виде функции времени и положения, в частности, на диаграмме волнового спектра скорости вращения и крутящего момента.
5. Способ по любому из пп. 2-4, согласно которому по меньшей мере одно из скорости вращения на забое скважины и крутящего момента на забое скважины во временной области вычисляют с помощью указанного компьютера в причинно-следственной операции свертывания путем обработки полученных значений скорости вращения верхнего привода и крутящего момента верхнего привода и функций импульсного отклика модифицированных компонентов матрицы перехода в течение заданного периода времени, включающего время прохождения сигнала в прямом и обратном направлениях в бурильной колонне, например периода времени, превышающего на долю время прохождения сигнала в прямом и обратном направлениях.
6. Способ по любому из предыдущих пунктов, согласно которому ширина спектральной полосы уменьшена на основании по меньшей мере одного из демпфирующих свойств и длины бурильной колонны, в частности благодаря применению фильтра Бесселя нижних частот n-го порядка, где n≥4, предпочтительно n≥10 или более предпочтительно n≥20, и сужения.
7. Способ по любому из предыдущих пунктов, согласно которому время задержки составляет по меньшей мере 1 с на 3000 м длины бурильной колонны.
8. Способ по п. 6 или 7, согласно которому время задержки дополнительно содержит часть временной задержки, представляющую временную задержку, обусловленную работой фильтра Бесселя.
9. Способ по любому из предыдущих пунктов, согласно которому скорость вращения на забое скважины и крутящий момент на забое скважины представляют собой соответственно скорость вращения долота и крутящий момент на долоте.
10. Способ по любому из предыдущих пунктов, согласно которому вычислительная модель на основе двухпортовой матрицы перехода в спектральной области для скважинного бурового оборудования содержит двухпортовую матрицу перехода в спектральной области, состоящую из единой или составной симметричной вычислительной модели бурильной колонны, эквивалентной линии передачи в спектральной области, включающей инерцию бурильной колонны, жесткость и демпфирующие свойства бурильной колонны в скважине, инерцию компоновки низа бурильной колонны и инерцию верхнего привода.
11. Способ по п. 10, согласно которому вычислительная модель на основе двухпортовой матрицы перехода в спектральной области представлена уравнением:

где:
M11(s), M12(s), M21(s) и M22(s) представляют собой ограниченные по ширине полосы частот и модифицированные по времени задержки спектральные компоненты передаточной функции матрицы перехода,
ωdh - скорость вращения на забое,
Tdh - крутящий момент на забое,
ωtd - полученная скорость вращения верхнего привода,
Tref - задаваемый крутящий момент верхнего привода,
 - задержка по времени регулятора скорости вращения, а
- задержка по времени регулятора скорости вращения, а
s - оператор преобразования Лапласа.
12. Способ по любому из предыдущих пунктов, выполняемый на компьютере, находящемся отдельно от скважинного бурового оборудования.
13. Устройство для оценки по меньшей мере одного из скорости вращения на забое скважины и крутящего момента на забое скважины для скважинного бурового оборудования при бурении скважины в породной формации,
причем скважинное буровое оборудование содержит вращательную приводную систему, бурильную колонну, которая имеет компоновку низа бурильной колонны, содержащую буровое долото, верхний конец, соединенный с вращательной приводной системой, и регулятор скорости, выполненный с возможностью управления скоростью вращения верхнего привода путем управления его крутящим моментом, при этом указанное устройство содержит управляемую компьютером систему наблюдения за операцией бурения, выполненную с возможностью:
- получения компонентов матрицы перехода вычислительной модели на основе двухпортовой матрицы перехода в спектральной области для скважинного бурового оборудования, причем вычислительная модель содержит демпфирующие свойства скважинного бурового оборудования, скорость вращения на забое скважины и крутящий момент на забое скважины являются зависимыми переменными, а скорость вращения и крутящий момент верхнего привода являются независимыми переменными;
- получения скорости вращения и крутящего момента верхнего привода при бурении; и
- вычисления по меньшей мере одного из скорости вращения на забое скважины и крутящего момента на забое скважины для скважинного бурового оборудования с использованием полученных компонентов матрицы перехода, скорости вращения верхнего привода и крутящего момента верхнего привода,
причем указанное вычисление включает:
- уменьшение ширины спектральной полосы для указанного вычисления, причем уменьшенная ширина полосы выбрана таким образом, что она включает в указанном вычислении ограниченное количество спектральных мод более высокого порядка,
- применение, в спектральной области, времени задержки к указанному вычислению, причем время задержки выбрано таким образом, что оно обеспечивает причинно-следственное решение во временной области и
- вычисление по меньшей мере одного из скорости вращения на забое скважины и крутящего момента на забое скважины для скважинного бурового оборудования с использованием примененных уменьшенной ширины спектральной полосы и добавленного времени задержки.
14. Устройство по п. 13, в котором управляемая компьютером система наблюдения за операцией бурения выполнена с возможностью оценки по меньшей мере одного из скорости вращения на забое скважины и крутящего момента на забое скважины в соответствии со способом по любому из пп. 2-11.
15. Устройство по п. 13 или 14, функционально соединенное с регулятором скорости или встроенное в него для получения скорости вращения и крутящего момента верхнего привода.
16. Скважинное буровое оборудование для бурения скважины в породной формации, содержащее: вращательную приводную систему, бурильную колонну, которая имеет компоновку низа бурильной колонны, содержащую буровое долото, верхний конец, соединенный с вращательной приводной системой, регулятор скорости, выполненный с возможностью управления заданными крутящим моментом и скоростью вращательного привода верхнего конца, и устройство для оценки по меньшей мере одного из скорости вращения на забое скважины и крутящего момента на забое скважины для скважинного бурового оборудования по любому из пп. 13-15.
17. Машиночитаемый носитель, хранящий компьютерный программный код, выполненный с возможностью считывания компьютером, причем компьютерный программный код выполнен с возможностью осуществления способа по меньшей мере по одному из пп. 1-12 в случае, когда указанный компьютер функционально соединен со скважинным буровым оборудованием и исполняет указанный программный код.
18. Машиночитаемый носитель по п. 17, который является некратковременным машиночитаемым носителем.
| WO 2014098598 A1, 26.06.2014 | |||
| WO 2013062409 A1, 02.05.2013 | |||
| МОДЕЛИРОВАНИЕ ПЕРЕХОДНОГО РЕЖИМА КНБК/БУРИЛЬНОЙ КОЛОННЫ В ПРОЦЕССЕ БУРЕНИЯ | 2008 |
|
RU2461707C2 |
| СПОСОБ ОПТИМАЛЬНОГО АДАПТИВНОГО УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ СКВАЖИН | 2015 |
|
RU2595027C1 |

