Область техники
Настоящее изобретение относится к способу усовершенствованного управления траекториями ствола скважины с одновременным повышением скоростей проходки при турбинном бурении.
Уровень техники
Большинство нефтяных и газовых скважин, пробуренных в настоящее время, представляют собой наклонно-направленные скважины, а это значит, что их траектория и точка (точки) вскрытия продуктивного горизонта существенно отклоняется (отклоняются) от прямой вертикальной скважины. Траекторию скважины часто описывают посредством так называемой обзорной таблицы, в которой указано, как меняются угол наклона и азимутальный угол в зависимости от измеренной глубины. Наклон представляет собой угловое отклонение от вертикали, а азимут относится к географическому направлению, при этом измеренная глубина относится к длине дуги по стволу скважины от выбранной координаты исходного положения на поверхности. Точки вскрытия продуктивного горизонта и траектории ствола скважины также могут быть описаны в прямоугольной системе координат, известных как направление к северу, направление к востоку и глубина по вертикали.
Наклонно-направленное бурение представляет собой способ бурения скважины, при котором ее профиль точно следует запланированной траектории ствола скважины. Неудовлетворительная проводка направления скважины может привести к возникновению множества проблем, например, к уменьшению нормы отбора углеводородов из пласта в случае, если точка вскрытия продуктивного горизонта не достигнута, а также к избыточному трению (крутящему моменту и сопротивлению движению), если ствол скважины является не гладким, а искривленным с высокой извилистостью ствола. Поскольку время и затраты являются важными факторами при бурении, задача в технологии наклонно-направленного бурения состоит в обеспечении возможности объединения точного управления траекторией и высокой скорости проходки.
Существует несколько способов управления профилем ствола скважины во время бурения. Известна относительно новая группа систем под названием роторно-управляемые системы (РУС), общая черта которых состоит в том, что они обеспечивают направленное управление при вращении колонны. Поскольку данные системы отличаются весьма высокой сложностью и дороговизной, они имеют ограниченную долю на рынке.
Традиционный способ, применяемый в течение многих десятилетий и широко используемый и в настоящее время благодаря относительно низким затратам, состоит в турбинном (скользящем) бурении с управляемым забойным двигателем. Как следует из названия, это технология, при которой колонна не вращается, а скользит в скважину при прохождении долота через пласт. Долото приводится в действие и вращается посредством гидравлического забойного двигателя, который может представлять собой винтовой забойный двигатель или турбинный двигатель, приводимый в действие буровым раствором, прокачиваемым через бурильную колонну. Проводку направления скважины обеспечивают посредством перегиба, часто предусмотренного в корпусе двигателя. Направление перегиба и оси вращения долота, называют положением отклонителя. На вертикальном участке ствола скважины положение отклонителя определяет направление географического азимута, а на наклонном секции ствола скважины положение отклонителя отображает вектор наподобие маленькой стрелки часов с круглым циферблатом. Например, положение отклонителя, указывающее вверх (положение на 12 часов) приведет к наращиванию (увеличению) наклона без изменения азимутального направления, а положение отклонителя на 9 часов отображает простой поворот налево. Таким образом, положение отклонителя представляет собой единичный вектор, описывающий требуемое направление кривизны ствола скважины, перпендикулярное текущему тангенциальному вектору оси ствола скважины. Величина кривизны зависит от многих переменных, например, угла перегиба, расстояния от долота до перегиба, положений стабилизаторов, жесткости при изгибе компоновки низа бурильной колонны (КНБК) и даже положения отклонителя.
Турбинное бурение в большинстве случае используют с инструментом для измерений во время бурения (ИВБ), расположенным поверх и рядом с буровым двигателем. Инструмент для ИВБ измеряет, посредством акселерометров и магнитометров, угол наклона и азимутальный угол самого инструмента и угол положения отклонителя. Эти результаты измерений, как правило, передают на поверхность посредством телеметрии по гидроимпульсному каналу связи для обеспечения необходимой обратной связи инженеру-технологу по наклонно-направленному бурению, то есть, человеку, ответственному за то, чтобы ствол скважины имел траекторию, близкую к запланированной траектории. Узкая полоса пропускания, получаемая посредством телеметрии по гидроимпульсному каналу связи, обеспечивает относительно низкие скорости измерений, как правило, 1 измерение в 30 секунд.
Особая проблема при турбинном бурении заключается в реактивном скручивании колонны, создаваемом типичным крутящим моментом долота. Например, секция длиной 3000 метров стандартных 5-дюймовых бурильных труб, на которые действует типичный крутящий момент долота в 5 кН⋅м, скручивается на 2,4 поворота. Это подразумевает, что относительно небольшое изменение крутящего момента долота может вызвать значительное и нежелательное изменение положения отклонителя. Трение ствола скважины вдоль колонны будет препятствовать немедленному скручиванию, но через какое-то время, обычно через 1-30 минут, что сильно зависит от скорости проходки и длины колонны, осевое движение колонны приведет к развитию нового крутящего момента долота в колонне. Положение отклонителя, общее скручивание, и средний крутящий момент колонны асимптотически достигнут своих равновесных значений. Динамические характеристики такого реактивного скручивания будут подробно раскрыты ниже.
В настоящее время обычной является ситуация, когда после установки инженером-технологом по наклонно-направленному бурению требуемого и устойчивого положения отклонителя, он управляет положением отклонителя опосредованно, путем регулирования перепада давления. Данная технология является общеизвестной, основанной на том факте, что потеря давления на гидравлическом забойном двигателе приблизительно пропорциональна нагрузке от крутящего момента двигателя. После некоторой задержки по времени увеличение давления на гидравлическом забойном двигателе можно будет наблюдать на поверхности в виде увеличения давления насоса. Давление насоса часто измеряют на буровом стояке на буровой площадке, при этом оно приблизительно равно давлению на выходе насоса. Когда наблюдают потерю этого давления на насосе, колонну опускают для повышения нагрузки на долото и, соответственно, для повышения крутящего момента и потери давления на гидравлическом забойном двигателе. Нагрузку на долото в данном случае задают в виде механической силы сжатия между долотом и пластом, известной в буровой промышленности как «нагрузка на долото» (ННД). По аналогии, крутящий момент долота обозначает результирующий крутящий момент между долотом и пластом, который известен как «крутящий момент на долоте» (КМНД).
Существует несколько автоматических систем управления, называемых «автобурильщиками перепада давления», которые управляют движением колонны для удержания перепада давления насоса на фактически постоянном уровне, значение которого близко к заданному значению.
Основные недостатки общепринятого способа управления положением отклонителя при турбинном бурении состоят в следующем.
- Возможности для увеличения нагрузки на долото и улучшения скорости бурения очень ограничены, поскольку положение отклонителя часто имеет наивысший приоритет. Это ограничение часто приводит к неудовлетворительной общей скорости бурения, значительно меньшей скоростей бурения, полученных в режиме роторного бурения.
- Результирующая кривизна ствола скважины, полученная за счет постоянного положения отклонителя, часто превышает максимальную кривизну запланированной траектории, для обеспечения необходимого допускаемого предела регулирования. Таким образом, для того чтобы ствол скважины имел траекторию, близкую к запланированной, бурильщик должен переключаться между режимом турбинного бурения и режимом роторного бурения. В последнем случае бурильная колонна вращается с относительно высокой скоростью для сведения к нулю эффекта направленности положения отклонителя.
- Переключение между режимами турбинного бурения и роторного бурения приводит к ухудшению гладкости ствола скважины, особенно, в случае длительных интервалов переключения глубины.
- Зачастую установка правильного и устойчивого положения отклонителя в режиме турбинного бурения после выполнения сеанса турбинного бурения и после соединения при добавлении нового участка трубы к колонне требует много времени.
- Высокое и переменное осевое трение ствола скважины затрудняет управление нагрузкой на долото и крутящим моментом на долоте с поверхности. Для того чтобы избежать возникновения высоких пиковых нагрузок, которые могут привести к перегрузке и остановке гидравлического забойного двигателя, средняя нагрузка на долото должна сохраняться на относительно низком уровне, по существу, ниже ресурса долота и мощности гидравлического забойного двигателя.
В режиме роторного бурения, долото приобретает более высокую скорость, равную сумме скоростей вращения колонны и горизонтального забойного двигателя. Такая увеличенная скорость долота только частично объясняет, почему режим роторного бурения в большинстве случаев создает намного более высокие скорости проходки по сравнению с режимом турбинного бурения. Наиболее важное объяснение состоит в том, что роторное бурение обеспечивает боле высокую нагрузку на долото с лучшим управлением.
Таким образом, задача настоящего изобретения состоит в том, что устранить по меньшей мере один из недостатков известных технических решений или по меньшей мере обеспечить полезную альтернативу известным техническим решениям.
Указанная задача решена посредством признаков, раскрытых в приведенном ниже описании и в прилагаемой формуле настоящего изобретения.
Настоящее изобретение заявлено в независимых пунктах формулы. Зависимые пункты формулы раскрывают предпочтительные варианты осуществления настоящего изобретения.
Подробное раскрытие изобретения
Далее раскрывается первый способ управления направлением траектории ствола скважины во время наклонно-направленного турбинного бурения посредством бурильной колонны, имеющей буровое долото, приводимое во вращение гидравлическим забойным двигателем вокруг оси вращения бурового долота на ее нижнем конце, причем направление оси вращения бурового долота задает положение отклонителя. Указанный способ содержит следующие шаги:
а1) оценивают потерю давления на гидравлическом забойном двигателе путем измерения давления бурового раствора;
b1) используют результат оценки потери давления, полученный на шаге а1), для вычисления крутящего момента гидравлического забойного двигателя; и
с1) вычисляют угол реактивного скручивания бурильной колонны путем умножения вычисленного крутящего момента, полученного на шаге b1), на коэффициент податливости бурильной колонны при кручении, причем шаг а1) дополнительно содержит включение какого-либо переходного давления бурового раствора в указанную оценку.
Здесь и далее по тексту выражения «давление бурового раствора» и «давление насоса» означают вычисленное давление бурового раствора, обычно измеренное на выходе главных циркуляционных насосов, у бурового стояка или у верхней части колонны.
Также раскрыта система управления направлением траектории ствола скважины во время наклонно-направленного бурения, причем указанная система содержит блок управления, выполненный с возможностью осуществления раскрытого первого способа. Специалисту в данной области техники будет понятно, что такая система и любая другая система, раскрытая в настоящем документе, косвенно также будет содержать компоненты для осуществления наклонно-направленного бурения, некоторые из которых могут быть опциональными для реализации настоящего изобретения в самом широком его смысле. Такие компоненты могут включать в себя гидравлический забойный двигатель с предусмотренным перегибом, инструменты ИВП, средства перемещения бурильной колонны, например, верхний привод, консольно-выступающий с тяжелых буровых лебедок и средства для обнаружения положения и нагрузки на крюк, насосы бурового раствора и средства для измерения расхода бурового раствора, средства для обнаружения крутящего момента и углового положения бурильной колонны и т.д.
Кроме того, в настоящем документе раскрыт компьютерный программный продукт, содержащий команды для обеспечения реализации процессором первого способа, раскрытого выше. Указанный процессор может быть включен в состав блока управления, тип которого рассмотрен выше.
Также в настоящем документе раскрыт второй способ управления направлением траектории ствола скважины при наклонно-направленном турбинном бурении посредством бурильной колонны, имеющей буровое долото, приводимое во вращение гидравлическим забойным двигателем вокруг оси вращения бурового долота на его нижнем конце, причем направление оси вращения бурового долота задает положение отклонителя. При этом указанный способ содержит следующие шаги:
а2) получают данные, свидетельствующие о крутящем моменте гидравлического забойного двигателя; и
b2) вычисляют угол реактивного скручивания бурильной колонны путем умножения крутящего момента, полученного на шаге а2), на коэффициент податливости бурильной колонны при кручении, причем указанный способ дополнительно содержит шаг, на котором:
с2) вращают бурильную колонну с помощью средств вращения бурильной колонны, при этом угол, по существу, равен вычисленному углу реактивного скручивания, но имеет противоположное направление.
Кроме того, в настоящем документе раскрыта система управления направлением траектории ствола скважины во время наклонно-направленного бурения, причем указанная система содержит блок управления, выполненный с возможностью осуществления шагов раскрытого выше второго способа.
Дополнительно, в настоящем документе раскрыт компьютерный программный продукт, содержащий команды для обеспечения реализации процессором второго способа, раскрытого выше. Указанный процессор может быть включен в состав блока управления.
Также в настоящем документе раскрыт третий способ управления направлением траектории ствола скважины во время наклонно-направленного турбинного бурения посредством бурильной колонны, имеющей буровое долото, приводимое во вращение гидравлическим забойным двигателем вокруг оси вращения бурового долота на его нижнем конце, причем направление оси вращения бурового долота задает положение отклонителя. При этом указанный способ содержит шаг:
а3) на котором меняют положение отклонителя относительно заданного направления для уменьшения величины кривизны ствола скважины.
Также раскрыта система управления направлением траектории ствола скважины во время наклонно-направленного бурения, причем указанная система содержит блок управления, выполненный с возможностью осуществления шагов раскрытого выше третьего способа.
И наконец, в настоящем документе раскрыт компьютерный программный продукт, содержащий команды для обеспечения реализации процессором третьего способа, раскрытого выше. Указанный процессор может быть включен в состав блока управления.
Раскрытые выше способы можно кратко изложить следующим образом.
1. Вычисление крутящего момента гидравлического забойного двигателя по результатам измерения и улучшенная оценка давления бурового раствора на основании усовершенствованной гидродинамической модели, включающей в себя любое переходное давление и/или расходы бурового раствора и опционально также время реагирования на изменение давления бурового раствора.
2. Мгновенная, и опционально также отсроченная, компенсация скручивания бурильной колонны от верхнего привода для, по существу, противодействия скручиванию, вызванному изменением крутящего момента бурового долота для сохранения более устойчивого положения отклонителя. Компенсация скручивания может быть основана на вычисленном крутящем моменте в соответствии с первым способом, но не обязательно. Альтернативно, она также может быть основана на крутящем моменте, измеренном в скважине и переданном на поверхность, причем последняя опция является эффективной, поскольку связь при высокой пропускной способности для ИВБ, например, индуктивная связь через бурильную колонну, становится коммерчески доступной.
3. Управляемое изменение положения отклонителя вокруг заданной точки для уменьшения величины кривизны ствола скважины. Этот последний способ можно использовать в сочетании с одним или обоими из других способов, но в равной степени он может быть использован в качестве независимого способа, существенно улучшенного по сравнению с существующими на сегодняшний день способами переключения между режимами турбинного и роторного бурения.
Задача для инженера-технолога по наклонно-направленному бурению заключается в том, чтобы ствол скважины сохранял траекторию, близкую к запланированной траектории, а также в том, чтобы обеспечить максимально быстрое бурение без возможных проблем, которые могут нанести вред компонентам бурильной колонны или отрицательно повлиять на качество бурения. Эта задача может быть условно разделена на следующие две подзадачи.
- Быстрое и точное управление положением отклонителя, которое одновременно позволяет менять скорость нагнетания и/или нагрузку на долото для оптимизации скорости проходки, с использованием первого и второго способов, раскрытых выше.
- Изменение положения отклонителя так, чтобы управлять как направлением, так и величиной кривизны ствола скважины, с использованием третьего способа, раскрытого выше.
Указанные подзадачи могут быть решены путем выполнения шести шагов, раскрытых ниже в качестве предпочтительного варианта осуществления настоящего изобретения, хотя настоящее изобретение, как таковое, определено независимыми пунктами формулы изобретения. Первые пять шагов относятся к первой подзадаче, а последний шаг направлен на решение второй подзадачи. Первые четыре шага совместно описывают новую функцию управления, которая может быть задана как компенсация скручивания и рассматривается в качестве упреждающего взаимодействия. Иными словами, реактивное скручивание колонны, вычисленное по коэффициенту податливости бурильной колонны, и результат оценки крутящего момента гидравлического забойного двигателя используют для вращения верхней части колонны, чтобы реактивное вращательное движение двигателя/положения отклонителя было нейтрализовано.
Шаги, раскрытые ниже, описывают неограничивающие варианты осуществления настоящего изобретения, объединяющие все три раскрытые выше способа. Следует отметить, что три первых шага, указанных ниже, относятся к первому раскрытому способу, четвертый шаг и опционально пятый шаг относятся ко второму способу, а шестой шаг относится к третьему способу. Два или три разных способа могут быть объединены, или каждый способ может быть использован отдельно от остальных способов.
Шаги 1 и 2, приведенные ниже, являются необходимыми в том случае, если прямые измерения крутящего момента бурового долота недоступны, что на сегодняшний день является наиболее распространенной ситуацией. Однако, если данные о крутящем моменте долота доступны и получены посредством нестандартной системы ИВБ или высокоскоростной телеметрической системы с сигналопроводящими бурильными трубами, указанные ниже шаги 1 и 2 могут быть пропущены. Низкоскоростные данные о крутящем моменте в скважине также могут быть использованы совместно с надземной оценкой для обеспечения автоматической настройки модели и повышенной точности крутящего момента бурового долота.
Шаг 1: Вычисляют перепад давления на гидравлическом забойном двигателе
Данный шаг требует некоторого упрощения вычислений потери давления. В общем, более сложная и комплексная гидравлическая модель обеспечит более точную оценку потери давления на гидравлическом забойном двигателе. Самый простой подход, наиболее часто используемый в настоящее время, не учитывает эффекты сжимаемости и допускает, что расход в общем кольцевом контуре потока является постоянным и не зависит от изменений нагрузки на двигатель, то есть, Q=Q0. При этом эталонное давление равняется испытательному давлению Р0, зарегистрированному при калибровочном испытании со скоростью Q0 нагнетания, при этом долото находится выше забоя. Перепад давления на двигателе при нагрузке на гидравлический забойный двигатель в данном случае приближенно выражен посредством перепада давления насоса Р-Р0.
Далее дополнительно рассмотрим два шага и примем во внимание эффекты сжимаемости и возможность изменения скорости нагнетания после завершения калибровочного теста выше забоя. Поправка первого порядка этих эффектов может быть учтена при допущении, что общее давление насоса может быть выражено следующим уравнением:

где Pm представляет собой потерю давления на гидравлическом забойном двигателе, Ps представляет собой потерю установившегося давления в оставшихся частях кольцевого контура потока (в основном, внутри бурильной колонны и через сопла долота), τр представляет собой время реагирования на изменение давления, а  представляет собой производную по времени давления насоса. Широко используемые модели потери давления, а также промысловая практика показали, что потери при установившемся состоянии в колонне и через сопла долота можно довольно хорошо приближенно описать посредством степенной модели, выраженной в виде:
представляет собой производную по времени давления насоса. Широко используемые модели потери давления, а также промысловая практика показали, что потери при установившемся состоянии в колонне и через сопла долота можно довольно хорошо приближенно описать посредством степенной модели, выраженной в виде:

где Q представляет собой скорость нагнетания, а ε представляет собой показатель степени давления, типичные значения которого составляют от 1,5 до 2. Этот показатель степени может быть определен экспериментально или теоретически. Если испытания над забоем включают в себя два установившихся давления Р0 и Р1, записанных при разных расходах Q0 и Р1, соответственно, то экспериментальный показатель степени давления равен:

Теоретический подход для определения данного показателя степени требует, чтобы большая часть общей потери давления в кольцевом контуре потока была известна и могла быть выражена аналитически или численно посредством справочных таблиц, то есть  . Далее, показатель степени давления можно формально выразить в виде:
. Далее, показатель степени давления можно формально выразить в виде:

Постоянная времени реагирования на изменение давления пропорциональна сжимаемости текучей среды, которая приводит к тому, что внутренний объем колонны выступает в качестве буферного объема, содержащего массу текучей среды, меняющейся в зависимости от давления. Кроме того, время реагирования на изменение давления можно определить экспериментально или теоретически.
Если колонна находится над забоем (Pm=0), то его можно выразить следующим образом:

Приближение, основанное на интеграции, применимо в том случае, если τр является постоянным и не зависит от расхода и давления. Если оно не является постоянным, а медленно изменяется в зависимости от Р и Q, то последнее приближение, тем не менее, будет эффективным для средних значений одинаковых переменных.
Можно видеть, что приближенное, теоретическое выражение для данной постоянной времени имеет вид:

где σ представляет собой отношение потери давления буровой трубы к общей потере давления, κ представляет собой сжимаемость текучей среды, a Vi представляет собой внутренний объем бурильной колонны. Первый показатель (внутри круглых скобок), который меньшей единицы, учитывает, что возбуждаемое потоками давление не является постоянным внутри бурильной колонны, а уменьшается линейно в зависимости от измеренной глубины. Данная формула показывает, что время реагирования на изменение давления не является постоянным, но изменяется пропорционально  . Данную информацию можно использовать для улучшения экспериментальной оценки времени реагирования на изменение давления:
. Данную информацию можно использовать для улучшения экспериментальной оценки времени реагирования на изменение давления:

где q=Q/Q0 и р=Р/Р0 представляют собой нормированный расход и давление насоса, соответственно.
Альтернативный способ определения постоянной времени реагирования на изменение давления рассмотрен ниже, в разделе, в котором раскрыты другие улучшения.
После установления реалистичных значений для показателя степени и времени реагирования на изменение давления, перепад давления на гидравлическом забойном двигателе можно найти, объединив уравнения (1) и (2):

Это улучшенное выражение, которое упрощено до Pm=Р-Р0 для условий установившегося состояния, когда Q=Q0. Дифференциальную составляющую в указанной выше формуле следует использовать с некоторой осторожностью, поскольку сигнал давления насоса, как правило, имеет высокочастотные компоненты, которые значительно усиливаются в производной по времени. Таким образом, дифференцирование по времени давления насоса можно выполнить посредством фильтра низких частот, который эффективным образом удаляет или ослабляет частотные компоненты выше относительно низкой частоты среза.
Шаг 2: Вычисляют крутящий момент гидравлического забойного двигателя
Гидравлической забойный двигатель объемного типа имеет, в зависимости от производителя, линейное отношение между приложенным крутящим моментом и потерей давления. Его характеристики часто задают посредством номинальной нагрузки от крутящего момента, Tmax и соответствующей максимальной потери давления, Pmax. Нагрузка от крутящего момента на гидравлический забойный двигатель при любой потере давления ниже указанного максимального значения может быть найдена путем линейной интерполяции:

где Vm=Tmax/Pmax представляет собой отношение крутящего момента к давлению двигателя и приблизительно равно объему текучей среды, соответствующему вращению ротора на один радиан. Это следует из уравнения баланса мощности:

где η представляет собой коэффициент полезного действия (меньший единицы), отвечающий за трение (в роторе и подшипниках) и утечку текучей среды между ротором и статором, а Ωm представляет собой угловую скорость ротора относительно статора. Произведение PmQ представляет собой гидравлическую мощность на входе, а TmQm представляет собой механическую мощность на выходе. Из данного уравнения находим, что Vm=Tm/Pm=η⋅Q/Ωm=η⋅Vrad, где Vrad представляет собой объем текучей среды, необходимый для обеспечения углового перемещения в 1 радиан. Если в гидравлическом забойном двигателе отсутствуют потери, то Vm=Vrad.
Шаг 3: Вычисляют скручивание колонны, вызванное крутящим моментом гидравлического забойного двигателя.
Важным параметром, необходимым для вычисления скручивания колонны, является податливость колонны при кручении. Податливость является мерой упругости при кручении и обратной величиной жесткости при кручении. Для обычной неоднородной колонны, формула для податливости при кручении имеет следующий вид:

где G представляет собой модуль упругости при сдвиге материала бурильной колонны (чаще всего стали), Ip=(π/32)⋅(D4-d4) представляет собой полярный момент инерции площади, при этом D и d представляют собой внешний и внутренний диаметры бурильной колонны, соответственно. И наконец, L представляет собой длину бурильной колонны. Для колонны, состоящей из однородных секций, интеграцию можно заменить суммированием по всем секциям. Секция бурильной колонны, имеющая другое трубное соединение и толщину тела, может быть принята за однородную, если полярный момент инерции площади вычислен как  , где λj представляет собой относительную длину соединений, обычно 0,05.
, где λj представляет собой относительную длину соединений, обычно 0,05.
После определения податливости бурильной колонны, вычисляют статистическое скручивание колонны, на которую воздействует оцениваемый крутящий момент гидравлического забойного двигателя как:

Шаг 4: Применяют компенсацию скручивания
Если верхняя часть колонны не вращается после проведения калибровочных испытаний над забоем, то колонну скручивают и обеспечивают обратное вращение положения отклонителя (против часовой стрелки), когда долото установлено на забой, при этом его нагрузка от крутящего момента увеличивается. Трение при кручении вдоль колонны будет препятствовать немедленному вращению. Вместо этого трение приведет к тому, что вращение будет зависеть от осевого движения колонны. Далее, положим, что трение в стволе скважины представляет собой сухое трение, то есть, сила трения имеет вектор, встречно-параллельный направлению движения и зависимый от величины скорости. При этом, скорость скручивания, dθtwist/dL, зависит от осевого движения и самого скручивания. Целесообразным является определение длины релаксации скручивания, заданной осевым перемещением колонны, необходимым для уменьшения неравновесного скручивания посредством коэффициента 1/е=0.37. Указанная длина релаксации скручивания может быть выражена следующим образом:

где μw представляет собой коэффициент трения ствола скважины,  представляет собой нормальное контактное усилие на единицу длины, Ctacc представляет собой накопленную податливость бурильной колонны при кручении (именуемую невращающейся точкой колонны), а rc представляет собой контактный радиус. В последнем выражении,
представляет собой нормальное контактное усилие на единицу длины, Ctacc представляет собой накопленную податливость бурильной колонны при кручении (именуемую невращающейся точкой колонны), а rc представляет собой контактный радиус. В последнем выражении,  указывает на общий момент трения ствола скважины, необходимый для вращения все бурильной колонны над забоем,
указывает на общий момент трения ствола скважины, необходимый для вращения все бурильной колонны над забоем,  представляет собой средний контактный радиус (при воздействии трения), а λ представляет собой коэффициент распределения трения. Последний коэффициент, как правило, меньше единицы, но может быть равен единице в особых случаях, когда трение полностью сконцентрировано в нижнем конце бурильной колонны. Следует отметить, что длина релаксации скручивания пропорциональна податливости при кручении и моменту трения при вращении над забоем. Оба показателя возрастают примерно линейно с изменением длины бурильной колонны. Это значит, что длина релаксации скручивания увеличивается примерно пропорционально длине бурильной колонны, возведенной в квадрат.
представляет собой средний контактный радиус (при воздействии трения), а λ представляет собой коэффициент распределения трения. Последний коэффициент, как правило, меньше единицы, но может быть равен единице в особых случаях, когда трение полностью сконцентрировано в нижнем конце бурильной колонны. Следует отметить, что длина релаксации скручивания пропорциональна податливости при кручении и моменту трения при вращении над забоем. Оба показателя возрастают примерно линейно с изменением длины бурильной колонны. Это значит, что длина релаксации скручивания увеличивается примерно пропорционально длине бурильной колонны, возведенной в квадрат.
Если осевая скорость колонны или скорость проходки, обозначенная общим символом νb скорости вращения долота, является постоянной, то длина релаксации скручивания соответствует времени релаксации:

Данное время релаксации также увеличивается пропорционально длине колонны, возведенной в квадрат. По сравнению с этим, постоянная времени реагирования на изменение давления, обеспечиваемая сжимаемостью, примерно пропорциональна внутреннему объему текучей среды и, соответственно, увеличивается примерно линейно с изменением длины бурильной колонны. Во многих случаях, а особенно для длинных колонн и при низких скоростях проходки, время релаксации намного превышает время реагирования на изменение давления. В таких случаях, дифференциальная составляющая давления в уравнении (5) может быть пропущена, с сохранением точности компенсации скручивания.
Указанные выше формулы применяют, когда скручивание колонны создается реактивным обратным вращением долота и без углового движения в верхней части колонны. Наоборот, если верхняя часть колонны вращается вперед на угол, равный равновесному углу скручивания, то положение отклонителя не изменится или не будет вращаться обратно при нагрузке на гидравлический забойный двигатель. Вместо этого, он останется близким к исходному положению отклонителя. Однако, положение отклонителя может меняться незначительно в течение переходного режима, поскольку исходное распределение крутящего момента вдоль колонны не является абсолютно постоянным, так как она находится в состоянии равновесия.
Это верхнее вращение колонны называется компенсацией скручивания и является упреждающим взаимодействием, которое улучшает управление положением отклонителя и уменьшает проблемы реактивного вращения положения отклонителя и длительных промежутков релаксации.
Шаг 5: Применяют обратную связь по нормальному положению отклонителя
Модели могут быть не идеальными, также как и результаты оценки крутящего момента гидравлического забойного двигателя и податливости колонны. Таким образом, управление положением отклонителя может включать в себя контур обратной связи, который сводит к минимуму разницу между необходимым и измеренным углами положения отклонителя. При этом можно использовать как регуляторы пропорционального типа, так и регуляторы пропорционально-интегрального типа. В последнем случае, установленное значение для положения верхнего привода может быть выражено как:

где Φ0 представляет собой начальное угловое положение верхнего привода (называемое положением над забоем без крутящего момента), при этом вторым условием является условие компенсации скручивания, причем  представляет собой ошибку положения отклонителя, где
представляет собой ошибку положения отклонителя, где  и
и  представляют собой соответствующие требуемый и измеренный углы положения отклонителя. Коэффициент
представляют собой соответствующие требуемый и измеренный углы положения отклонителя. Коэффициент  пропорциональности является безразмерным, а целый множитель
пропорциональности является безразмерным, а целый множитель  имеет величину обратной длины. Если, в качестве особого случая, целый множитель опускают
имеет величину обратной длины. Если, в качестве особого случая, целый множитель опускают  , то ошибка
, то ошибка  положения отклонителя уменьшится экспоненциально на коэффициент 1/e после того, как глубина проходки станет равной
положения отклонителя уменьшится экспоненциально на коэффициент 1/e после того, как глубина проходки станет равной  . Соответствующее время регулирования равняется
. Соответствующее время регулирования равняется  . Для того чтобы избежать неустойчивости из-за задержки измерений, эта постоянная времени должна значительно превышать время τmwd задержки измерения ИВБ. Данное условие эквивалентно требованию, чтобы
. Для того чтобы избежать неустойчивости из-за задержки измерений, эта постоянная времени должна значительно превышать время τmwd задержки измерения ИВБ. Данное условие эквивалентно требованию, чтобы  .
.
Простое пропорциональное регулирование является достаточным для того, чтобы положение отклонителя достигло заданного угла асимптотически. Дополнительная интегральная составляющая приведет к временному проскакиванию положения отклонителя, так что среднее положение отклонителя быстрее достигнет заданного значения. Можно показать, что оптимальное проскакивание без колебаний хвостовой части получают, если постоянная времени интеграции примерно в два раза больше базовой постоянной времени регулирования. Это значит, что  . Более высокие значения приведут к увеличению опасности колебаний и неустойчивостей.
. Более высокие значения приведут к увеличению опасности колебаний и неустойчивостей.
Внутренний контур управления, обеспечивающий то, что текущее ориентирование верхней колонны происходит в соответствии с установленным значением, подробно здесь не раскрыт. Допускается, что сервоуправление углового положения является точным и быстрым, то есть, контур управления угловым положением имеет постоянные времени, которые намного меньше остальных постоянных времени системы. Угловое положение верхней колонны не требует абсолютных координат исходного положения, а только относительных. Эти относительные координаты исходного положения следует задавать так, чтобы они были равны измеренному положению отклонителя, когда долото находится над забоем, а колонна не имеет крутящий момент, то есть, без остаточного скручивания. Любое остаточное скручивание следует сначала исключить путем возвратно-поступательного движения колонны в осевом направлении, посредством поднятия или опускания колонны, когда к колонне не приложен крутящий момент или угловое движение. Согласно приведенному выше анализу, осевое движение долота, необходимое для исключения остаточного крутящего момента, составляет несколько длин релаксации скручивания. Общее неточное движение может быть продолжительнее из-за динамичного упругого растягивания, происходящего в результате изменения направления движения на обратное. Если верхний привод не имеет крутящий момент и выполнен с возможностью свободного вращения во время указанного процесса устранения скручивания, эффективная длина релаксации (и время), по существу, укорачивается. Это связано с тем, что точка поворота при скручивании движется к центру трения и, тем самым, уменьшает коэффициент λ распределения в уравнении 10.
В качестве примера установления относительных координат исходного положения приведем следующий пример. Если измеренное положение отклонителя колонны, не имеющей крутящего момента, установлено на 3 часа (90° от верхнего положения), то соответствующее угловое положение верхнего привода следует задавать так, чтобы оно указывало на восток (90° от севера). Относительные координаты исходного положения углового приводного механизма следует задавать во время работы насосов, поскольку для обеспечения системы телеметрии по гидроимульсному каналу связи ИВБ требуется циркуляция текучей среды и некоторая минимальная потеря давления на долоте. Сопутствующее вращение двигателя и долота приведет к созданию незначительного остаточного крутящего момента, поскольку буровое долото будет иметь небольшую, но конечную боковую силу. Однако, соответствующее остаточное скручивание не влияет на точность управления положением отклонителя при условии, что оно является постоянным.
Шаг 6: Управляют величиной кривизны
Математически, кривизна сглаженной пространственной кривой представляет собой вектор, заданный в виде производной от единичного тангенциального вектора относительно измеренной глубины. Это значит, c=dt/dL, где тангенциальный вектор можно записать в виде t=(cosαsinθ,sinαsinθ,cosθ), при этом α и θ представляют собой азимутальный гол и угол наклона, соответственно. В буровой промышленности величину кривизны ствола скважины часто называют степенью искривления ствола скважины.
Поскольку вектор кривизны всегда перпендикулярен тангенциальному вектору, он также может быть уникальным образом представлен в виде двухмерного вектора или, как альтернатива, в виде скалярной пространственной кривизны:

где с0 представляет собой диапазон кривизны, а  представляет собой положение отклонителя, заданное в виде направления оси вращения перегиба/долота, относительно высокой стороны (положение на 12 часов) в наклонном стволе скважины. Диапазон с0 кривизны, как правило, представляет собой свойство направленной части компоновки низа бурильной колонны КНБК (ВНА) и сильно зависит от величины угла перегиба и от мест расположения перегиба и наддолотных стабилизаторов бурильной колонны. В буровой промышленности его, как правило, называют величиной угловой скорости поворота, но в настоящем документе он назван кривизной компоновки. Он может также зависеть от самого положения отклонителя, что подразумевает, например, что темпы снижения для ориентирования нижнего положения отклонителя
представляет собой положение отклонителя, заданное в виде направления оси вращения перегиба/долота, относительно высокой стороны (положение на 12 часов) в наклонном стволе скважины. Диапазон с0 кривизны, как правило, представляет собой свойство направленной части компоновки низа бурильной колонны КНБК (ВНА) и сильно зависит от величины угла перегиба и от мест расположения перегиба и наддолотных стабилизаторов бурильной колонны. В буровой промышленности его, как правило, называют величиной угловой скорости поворота, но в настоящем документе он назван кривизной компоновки. Он может также зависеть от самого положения отклонителя, что подразумевает, например, что темпы снижения для ориентирования нижнего положения отклонителя  могут отличаться от темпа увеличения верхнего положения отклонителя
могут отличаться от темпа увеличения верхнего положения отклонителя  . Кривизна компоновки также может иметь малый фазовый угол arg(c0)≠0, отвечающий за тот факт, что истинное направление кривизны может быть смещено от измеренного направления положения отклонителя. Смещение направления может происходить из-за комбинации реальных эффектов, вызванных вращением долота или неоднородностью пласта, и из-за погрешности смещения в измерении положения отклонителя.
. Кривизна компоновки также может иметь малый фазовый угол arg(c0)≠0, отвечающий за тот факт, что истинное направление кривизны может быть смещено от измеренного направления положения отклонителя. Смещение направления может происходить из-за комбинации реальных эффектов, вызванных вращением долота или неоднородностью пласта, и из-за погрешности смещения в измерении положения отклонителя.
Комплексное представления особенно целесообразно для вычисления средней кривизны ствола скважины, когда положение отклонителя меняется за усредняющий интервал. Очевидно, что средняя кривизна за конкретный интервал временили или интервал глубин бурения можно выразить в виде:

где νrop представляет собой скорость проходки, а в скобках  обозначено усреднение по глубине. Данная формула является общей и применяется для нахождения как направления средней кривизны
обозначено усреднение по глубине. Данная формула является общей и применяется для нахождения как направления средней кривизны  , так и диапазона
, так и диапазона  кривизны для любого изменения положения отклонителя.
кривизны для любого изменения положения отклонителя.
Удобно задавать коэффициент направленности для квалификации как относительного уменьшения кривизны, так и направления средней кривизны:

В данном случае прямые скобки  означают модуль комплексного числа внутри них. Последнее приближение применимо, если с0 является постоянным в течение усредненного интервала глубин. В общем, величина |δ|≤1, если направление средней кривизны составляет
означают модуль комплексного числа внутри них. Последнее приближение применимо, если с0 является постоянным в течение усредненного интервала глубин. В общем, величина |δ|≤1, если направление средней кривизны составляет  .
.
Ниже рассмотрено несколько классов и особые случаи изменения положения отклонителя. Для упрощения, исходят из того, что и скорость проходки, и диапазон кривизны являются постоянными в течение периода изменения. Кроме того, исходят из того, что скорость  вращения положения отклонителя является относительно низкой, то есть, тангенциальная скорость колонны намного меньше осевой скорости, заданной скоростью проходки. Математически
вращения положения отклонителя является относительно низкой, то есть, тангенциальная скорость колонны намного меньше осевой скорости, заданной скоростью проходки. Математически  , где
, где  была задана выше в отношении уравнения (10). Это ограничение скорости вращения колонны может быть целесообразным для улучшения управляемости положения отклонителя. Без данного ограничения момент трения и переходные значения скручивания могут быть настолько высокими, что мгновенное управление положением отклонителя будет сильно затруднено.
была задана выше в отношении уравнения (10). Это ограничение скорости вращения колонны может быть целесообразным для улучшения управляемости положения отклонителя. Без данного ограничения момент трения и переходные значения скручивания могут быть настолько высокими, что мгновенное управление положением отклонителя будет сильно затруднено.
Один важный класс способов управления кривизной характеризуется циклическими изменениями угла положения отклонителя, то есть положение отклонителя совершает колебание назад и вперед вокруг его проектного направления. В качестве особого примера приведено следующее: если угол положения отклонителя колеблется линейно между экстремумами - πa и + πa, причем а представляет собой нормализованную амплитуду изменения, то средняя комплексная кривизна становится равной:

где коэффициент направленности является действительным и равен:

Таким образом, эффективная величина кривизны уменьшается управляемым способом и одновременно сохраняется среднее направление кривизны. Приведен следующий числовой пример: если а=0,5 (положение отклонителя колеблется на ±90° вокруг среднего положения), то кривизна уменьшается на коэффициент 2/π=0,64, по сравнению со статическим положением отклонителя.
Другой класс способов управления направлением и величиной кривизны заключается в более или менее монотонном вращении положения отклонителя в одном направлении (как правило, по часовой стрелке) и одновременном изменении скорости вращения в зависимости от измеренного положения отклонителя. Например, можно сохранять положение отклонителя постоянным в заданном положении в течение конкретного периода времени, а затем вращать положение отклонителя против часовой стрелки на целое число оборотов с постоянной скоростью вращения. Величина вектора направленности при этом равна относительному времени в предпочтительном направлении положения отклонителя. Данный режим напоминает существующую в настоящее время практику переключения между роторным и турбинным бурением, за исключением того, что допустимая низкая скорость обеспечивает непрерывный способ турбинного бурения. Другой вариант способа модуляции скорости вращения отражен следующим уравнением, описывающим непрерывную, но модулированную скорость вращения положения отклонителя:

где  представляет собой среднюю угловую скорость вращения, а а теперь обозначает коэффициент модуляции скорости. Данное уравнение является нелинейным дифференциальным уравнением, которое необходимо решить числовым способом для того, чтобы найти сначала мгновенное положение отклонителя
представляет собой среднюю угловую скорость вращения, а а теперь обозначает коэффициент модуляции скорости. Данное уравнение является нелинейным дифференциальным уравнением, которое необходимо решить числовым способом для того, чтобы найти сначала мгновенное положение отклонителя  , а затем фактор направленности
, а затем фактор направленности  в зависимости от коэффициента модуляции. Если данное отношение найдено для серии различных значений модуляции, то эти значения могут быть использованы для определения обратной функции a(δ).
в зависимости от коэффициента модуляции. Если данное отношение найдено для серии различных значений модуляции, то эти значения могут быть использованы для определения обратной функции a(δ).
Как правило, сложно заранее определить кривизну с0 компоновки, отображающую мгновенную кривизну относительно направления положения отклонителя. К счастью, можно определить данную кривизну экспериментально в процессе бурения, как кратко будет раскрыто далее. Из объединенного определения кривизны c=dt/dL, следует, что изменение направления после бурения конкретного расстояния составляет  . Используя скалярное комплексное представление для изменения кривизны и направления, находят, что
. Используя скалярное комплексное представление для изменения кривизны и направления, находят, что  или
или  . Ели кривизна компоновки не является фактической, это значит, что между измеренным положением отклонителя и создаваемым направлением кривизны имеется угловая разница.
. Ели кривизна компоновки не является фактической, это значит, что между измеренным положением отклонителя и создаваемым направлением кривизны имеется угловая разница.
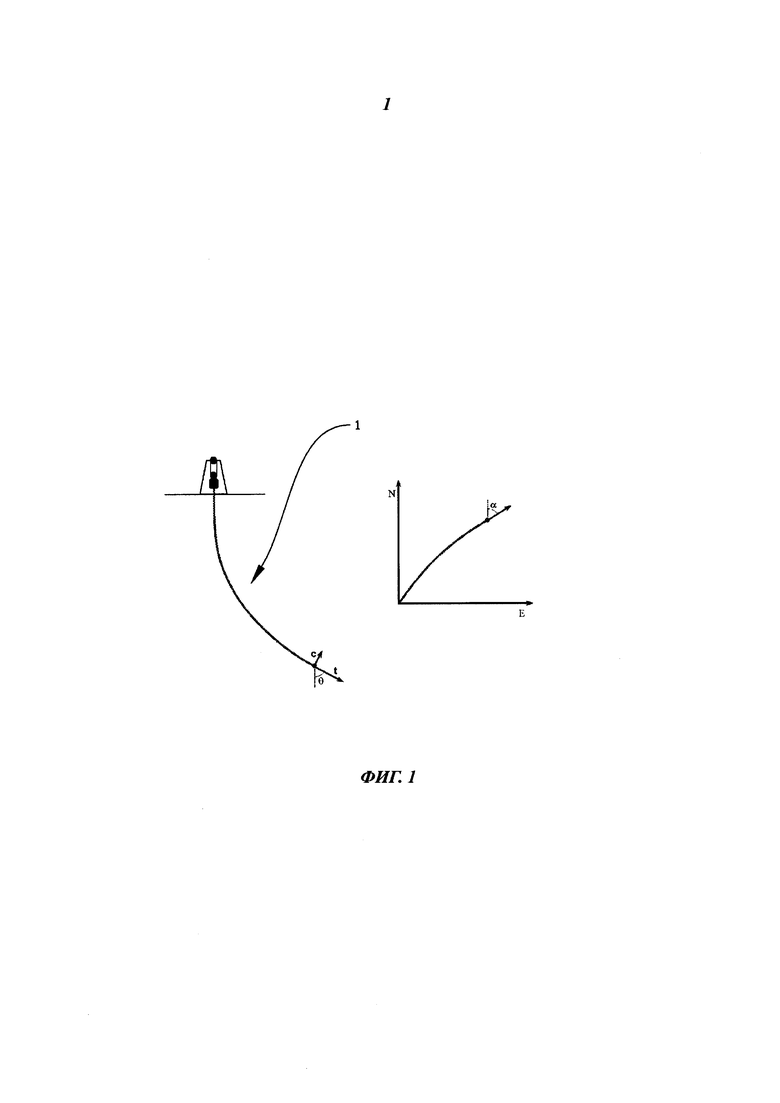
На фиг. 1 представлена схематичная вертикальная проекция (слева) и горизонтальная (Север-Восток) проекция траектории ствола скважины.
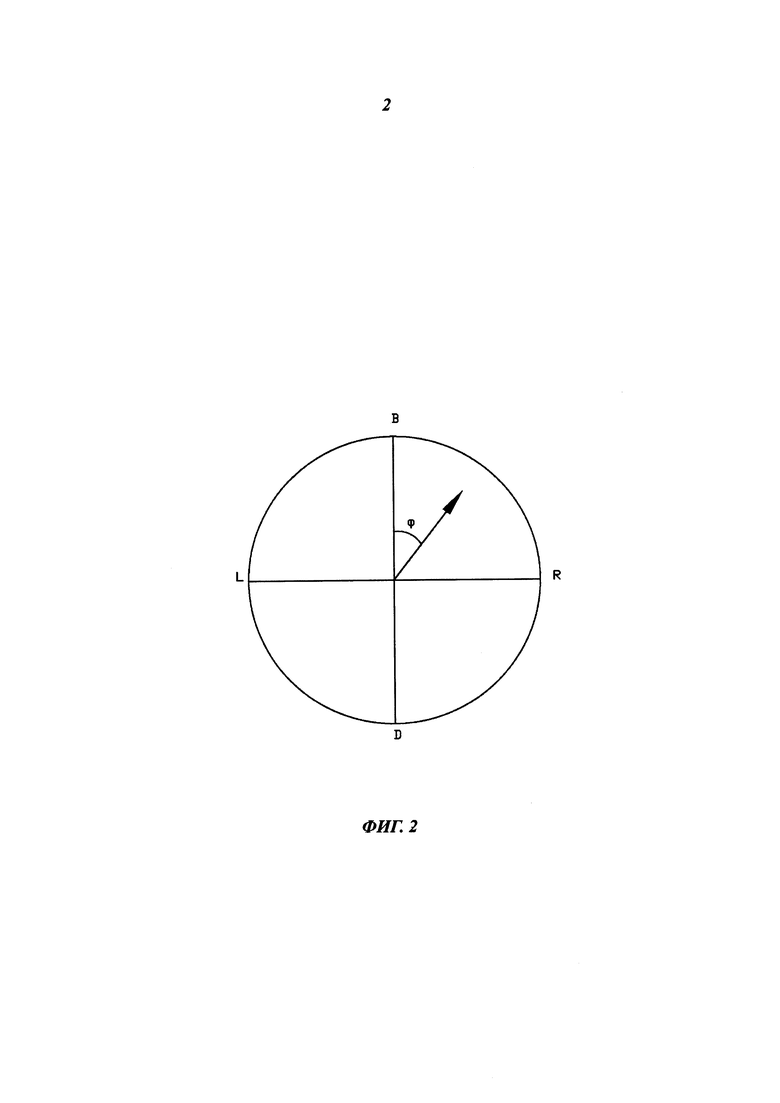
На фиг. 2 представлен круговой график для визуализации угла положения отклонителя.
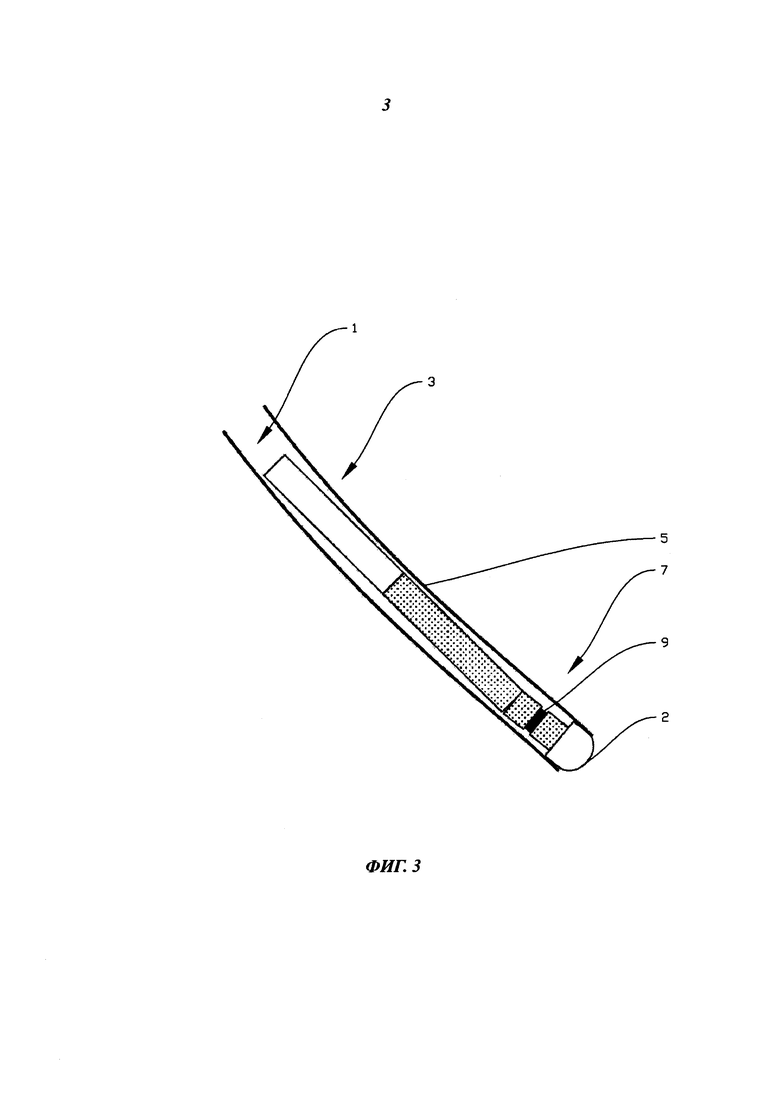
На фиг. 3 схематично показана компоновка низа бурильной колонны с автоматическим регулированием, содержащая гидравлический забойный двигатель с предусмотренным перегибом.
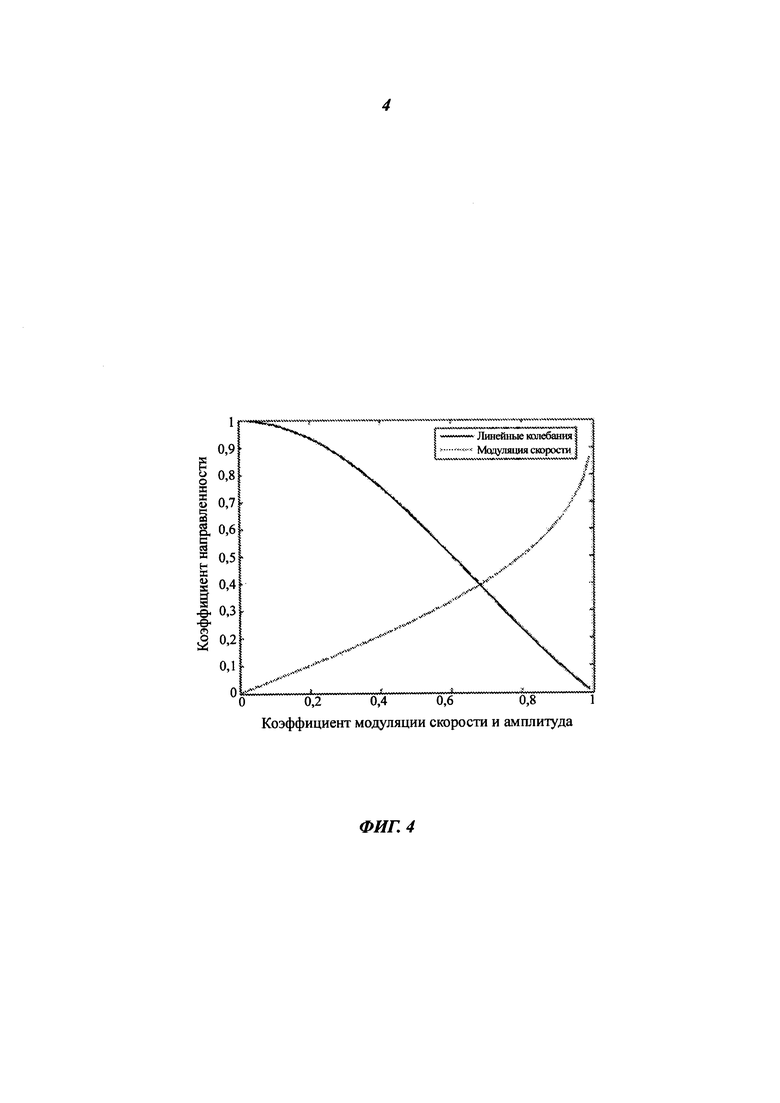
На фиг. 4 показан график зависимости коэффициентов направленности от нормализованной амплитуды колебаний и модуляции скорости.
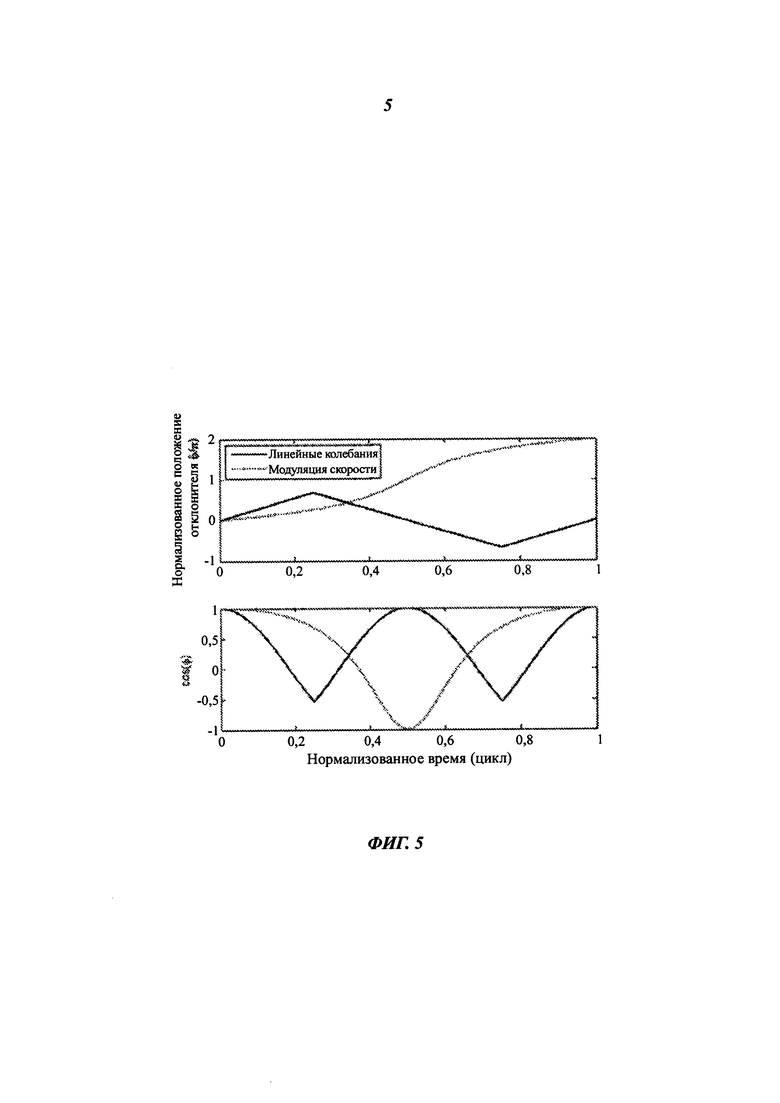
На фиг. 5 проиллюстрировано два способа изменений положения отклонителя, оба из которых обеспечивают коэффициент направленности |δ|=0,394 при коэффициенте модуляции а=0,681.
Чертежи, описание которых приведено ниже, в частности фиг. 1 и 3, представлены схематично и упрощенно. Различные элементы на чертежах могут быть изображены не в масштабе.
На фиг. 1 показана вертикальная и горизонтальная проекции наклонного ствола 1 скважины. Также на чертеже проиллюстрирован угол θ наклона и азимутальный угол α, причем N и Е обозначают север и восток, соответственно. При этом с обозначает кривизну, a t - тангенциальный вектор. Существует несколько способов, например, сбалансированный тангенциальный способ и способ минимальной кривизны, которые можно использовать для преобразования координат траектории в прямоугольную систему координат.
На фиг. 2 показано, как положение  отклонителя можно рассматривать в виде вектора, наподобие маленькой стрелки часов с круглым циферблатом. Угловые положения В, R, D и L обозначают повышение (увеличивающийся наклон), правый поворот, падение (уменьшающийся наклон) и левый поворот, соответственно. Таким образом, положение отклонителя представляет собой единичный вектор, описывающий требуемое направление кривизны ствола скважины и перпендикулярный текущему тангенциальному вектору оси ствола скважины. Величина кривизны зависит от многих переменных, например, угла перегиба, расстояния от долота до перегиба, положений стабилизаторов, жесткости на изгиб компоновки низа бурильной колонны (КНБК) и даже положения отклонителя.
отклонителя можно рассматривать в виде вектора, наподобие маленькой стрелки часов с круглым циферблатом. Угловые положения В, R, D и L обозначают повышение (увеличивающийся наклон), правый поворот, падение (уменьшающийся наклон) и левый поворот, соответственно. Таким образом, положение отклонителя представляет собой единичный вектор, описывающий требуемое направление кривизны ствола скважины и перпендикулярный текущему тангенциальному вектору оси ствола скважины. Величина кривизны зависит от многих переменных, например, угла перегиба, расстояния от долота до перегиба, положений стабилизаторов, жесткости на изгиб компоновки низа бурильной колонны (КНБК) и даже положения отклонителя.
На фиг. 3 представлена компоновка с автоматическим регулированием. Ствол 1 скважины пробурен в пласте посредством бурового долота 2, соединенного с нижним концом бурильной колонны 3. Гидравлический забойный двигатель (ГЗД) 7 предусмотрен над буровым долотом 2 и содержит регулируемый с поверхности перегиб 9. Между нижним концом бурильной колонны 3 и ГЗД 7, компоновка КНБК оснащена инструментом 5 для измерения во время бурения (ИВБ). Инструмент 5 для ИВБ выполнен с возможностью измерения, посредством акселерометров и магнитометров, угла наклона и азимутального угла самого инструмента и угла положения отклонителя. Эти результаты измерения, как правило, передают на поверхность посредством телеметрии по гидроимпульсному каналу связи для обеспечения необходимой обратной связи инженеру-технологу по наклонно-направленному бурению, то есть, человеку, ответственному за то, чтобы ствол скважины имел траекторию, близкую к запланированной. Узкая полоса пропускания, получаемая посредством телеметрии по гидроимпульсному каналу связи, обеспечивает относительно низкие скорости измерений, как правило, 1 измерение в 30 секунд.
На фиг. 4 представлен коэффициент направленности для частных случаев, рассмотренных выше, в зависимости от нормализованной амплитуды колебаний и коэффициента модуляции скорости, соответственно. Видно, что рассматриваемые способы дополняют друг друга в том, что небольшие амплитуды колебания обеспечивают относительно высокую направленность, а незначительная модуляция скорости обеспечивает относительно низкую направленность. Два коэффициента направленности совпадают (δ=0,394), когда а=0,681. Этот частный случай используют для иллюстрации двух способов на фиг. 5. Для упрощения, также допускают, что требуемое среднее положение отклонителя равно 0,  . Верхний подграфик показывает нормализованные углы положения отклонителя в зависимости от времени одного цикла, а нижний подграфик показывает, как косинус углов положения отклонителя меняется в течение того же самого периода. Усреднения графиков конусов (не показаны в явном виде) равны общему коэффициенту направленности 0,394.
. Верхний подграфик показывает нормализованные углы положения отклонителя в зависимости от времени одного цикла, а нижний подграфик показывает, как косинус углов положения отклонителя меняется в течение того же самого периода. Усреднения графиков конусов (не показаны в явном виде) равны общему коэффициенту направленности 0,394.
Способ модуляции скорости вращения имеет преимущества над способом колебаний, которое заключается в том, что он более эффективно способствует уменьшению осевого трения и, таким образом, улучшает управление нагрузкой на долото. Чем выше скорость вращения и частота циклов, тем эффективнее уменьшение осевого трения. С другой стороны, более высокие скорости приведут к увеличению переходного крутящего момента и затруднят управление положением отклонителя. Таким образом, оптимальную скорость вращения следует определять так, чтобы она обеспечивала компромисс между обеими конфликтующими задачами.
Можно возразить, что предлагаемые способы не обеспечивают идеальную кривизну ствола скважины, поскольку направление кривизны меняется. Математически это верно. На практике, однако, вопрос сглаженности ствола скважины и извилистости является вопросом масштаба длин неидеальностей. Можно видеть, что боковое горизонтальное смещение от идеального ствола скважины представляет собой дважды интегрированную величину погрешности кривизны. Если для упрощения допустить, что кривизна меняется в одной плоскости так, что ее можно рассматривать в качестве биполярной скалярной функции, то боковое отклонение можно записать в виде:

где Lc представляет собой длину проходки во время одного цикла. Последнее приближение применимо в том случае, если погрешность кривизны является постоянной. Например, если погрешность кривизны, заданная в виде разницы между фактической кривизной и проектной кривизной, постоянна и равна cerr=2deg/30m=0,0012m-1, а длина проходки за один цикл равна 1 м, то боковая погрешность составит только 0,6 мм. Для сравнения допустим, что турбинное и роторное бурение используют для каждой второй свечи (свеча в данном случае обозначает группу из трех отдельных труб типовой длины в 30 м). Также допустим, что проектная скорость увеличения наклона составляет 2°/30 м, а при турбинном бурении указанная скорость увеличения составляет 4°/30 м (кривизна компоновки). При этом соответствующая максимальная погрешность боковой траектории возникает в переходах между двумя режимами и равна 0,5⋅0,0012⋅302 м = 0,52 м. Это является значительным отклонением, которое может привести к избыточной силе трения, особенно, если во время завершающего шага в скважину вводят крутую обсадную колонну с небольшим диаметральным зазором.
Другие улучшения
Компенсация скручивания, используемая в качестве упреждающего взаимодействия, не требует измеренного крутящего момента в верхней части колонны. Таким образом, измерения крутящего момента верхней части колонны, либо напрямую - посредством встроенного датчика крутящего момента колонны, либо косвенно - через крутящий момент верхнего привода, являются опциональными. В условиях установившегося состояния, крутящий момент верхней части должен быть равен измеренному крутящему моменту гидравлического забойного двигателя. Разница в установившемся состоянии означает, что одно или оба измерения могут иметь погрешность смещения или ошибку масштабирования. Временная разница, однако, указывает на то, что условия установившегося состояния не достигнуты и что ожидается изменение положения отклонителя кроме случаев, когда нагрузка от крутящего момента на долото или угловое положение поверхности отрегулировано для закрытия зазора крутящего момента. Таким образом, измеренную разницу между крутящим моментом в скважине и на поверхности можно использовать в качестве дополнительного контура упреждения, который может улучшить время реагирования и точность управления положением отклонителя.
Переходное скручивание из-за неравномерного распределения крутящего момента вдоль колонны можно также уменьшить путем применения временной недостаточной компенсации или перекомпенсации. Например, если измерения ИВБ показывают, что положение отклонителя временно вращается назад (против часовой стрелки) при увеличении нагрузки на гидравлической забойный двигатель и применена нормальная компенсация скручивания, то можно минимизировать этот переход путем применения ограниченной во времени упреждающей компенсации скручивания, превышающей раскрытую выше. Это всего лишь один из множества возможных примеров того, как можно дополнительно улучшить управление кривизной ствола скважины путем адаптивного регулирования параметров управления.
Существует альтернативный способ оценки постоянной времени реагирования на изменение давления, который основан на взаимодействии между нагрузкой на долото и крутящим моментом долота. Даже несмотря на то, что данное взаимодействие, в целом, не является постоянным или линейным, его можно рассматривать как линейное в течение ограниченного времени и интервалов глубины. То есть, допускают, что изменение крутящего момента задано следующим образом:

где μb представляет собой нормализованный коэффициент крутящего момента долота (типа коэффициента трения долота/пласта), db представляет собой диаметр долота, a ΔFb представляет собой изменение силы долота. Коэффициент db/3 представляет собой эффективный контактный радиус положения отклонителя, если среднее контактное давление торца долота не зависит от радиуса.
Когда осевое трение ствола скважины не является слишком высоким или слишком неустойчивым, нагрузку на долото можно достаточно легко оценить по результатам измерений, полученных с поверхности, в виде разницы между эталонной нагрузкой на крюк (вес конструкции над забоем) минус текущая нагрузка на крюк. Обусловленное нагрузкой изменение в крутящем моменте долота также приведет к немедленному изменению давления гидравлического забойного двигателя и изменению с задержкой перепада давления насоса. Таким образом, нагрузка на крюк и давление насоса представляют собой два разных динамических вида реагирования на изменение действительной нагрузки на долото. Изменение нагрузки на крюк более-менее является отражением изменения нагрузки на долото, пусть и с небольшой задержкой, при этом давление насоса реагирует на указанное изменения скорее как крутящий момент горизонтального забойного двигателя, отфильтрованный с помощью фильтра низких частот первого порядка.
Динамическое отношение между нагрузкой на крюк и давлением насоса можно смоделировать известным способом, называемым идентификацией системы. Это статистический способ, использующий временные ряды или частотный спектр входных и выходных переменных для построения математической модели динамической системы. (См. веб-страницы «Mathwork» в их панели инструментов «System Identification Toolbox»). Моделируемая динамическая система называется системой типа «черного ящика», если не существует теоретических знаний о системе, и системой типа «серого ящика», если структура модели известна, но параметры системы неизвестны. В случае с системой типа «серого ящика», реагирование на изменение давления насоса похоже на характеристику фильтра низких частот:

где Hpw0 представляет собой отношение амплитуды к низкой частоте, τpw представляет собой измеренную постоянную времени, a s=jω представляет собой комплексную переменную преобразования Лапласа, причем  является мнимой единицей, а ω - угловой частотой.
является мнимой единицей, а ω - угловой частотой.
Допустим, что дифференциальная нагрузка на крюк (нагрузка на крюк, основанная на оценке нагрузки на долото) и перепад давления насоса измеряют в течение продолжительного интервала времени, включающего в себя некоторые существенные изменения нагрузки на долото. Далее, посредством способа идентификации системы можно определить два неизвестных параметра Hpw0 и τpw. Поскольку нагрузка на крюк, основанная на нагрузке на долото, является запаздывающей версией действительной нагрузки на долото, измеренная постоянная времени представляет собой разницу между действительным временем реагирования и временем задержки нагрузки на крюк τw. Допускается, что последний из временных параметров приближенно равен времени пробега звуковой волны, которая намного меньше первого из временных параметров. Таким образом, скорректированное время реагирования на изменение давления равно:

Таким образом, было раскрыто два независимых способа экспериментального определения данного времени реагирования.
Кроме того, для проверки качества ранее оцененного времени реагирования на изменение давления, способ, основанный на нагрузке на крюк, также обеспечивает ценную информацию о соотношении крутящего момента к нагрузке на долото. Это следует из того, что отношение Hpw0 амплитуды к низкой частоте можно выразить следующим образом:

Единственным неизвестным параметром в данном выражении является нормализованный коэффициент μb крутящего момента долота. Часто допускают, что коэффициент μb является постоянным, но в целом он зависит от многих параметров, например, типа пласта, агрессивности долота и состояния долота (оно ухудшается с притуплением долота). Он даже может меняться с изменением средней нагрузки на долото, когда крутящий момент долота нелинейно зависит от нагрузки на долото.
Описанный выше способ можно использовать многократно для наблюдения за коэффициентом момента трения в зависимости от глубины, нагрузки на долото и скорости проходки. Если автобурильщик работает настолько идеально, что имеются лишь очень незначительные изменения нагрузки на долото и давления насоса, то можно допустить, что компьютеризированный автобурильщик будет вызывать небольшие искажения для увеличения соотношения сигнал-шум оцениваемых параметров. Такие искажения должны быть относительно небольшими, но предпочтительно содержать заданный диапазон частот с обеих сторон частоты реагирования на изменение давления, 1/(2πτр). Сигнал с линейной частотной модуляцией, отображающий переменную заданную величину нагрузки на долото с постоянной амплитудой (обычно 5% от средней нагрузки) и качающаяся частота являются отличными кандидатами для таких искажений.
Интеграция в улучшенный автобурильщик
Раскрытые выше способы управления траекторией могут быть предпочтительно встроены в виде неотъемлемой части в автобурильщики нового типа, усовершенствованные по сравнению с современными автобурильщиками перепада давления. Традиционные автобурильщики перепада давления, в основном, управляют торцом долота косвенно по нагрузке на долото и движению тяжелой буровой лебедки, а новый автобурильщик использует активно и тяжелые буровые лебедки, и верхний привод для управления и нагрузкой на долото, и положением отклонителя. В частности, упреждающая компенсация скручивания обеспечивает повышенную гибкость и точность. Поскольку отличное управление кривизной можно достичь также в переходных фазах, когда скорость нагнетания и крутящий момент долота изменяются, новый автобурильщик может повысить скорость проходки за счет лучшего использования возможностей долота и гидравлического забойного двигателя. Высокая скорость бурения в режиме турбинного бурения приведет к снижению необходимости переключения между режимами турбинного и роторного бурения, тем самым, также обеспечивая более сглаженную и более точную траекторию стола скважины.
Другое преимущество этих новых способов для улучшенного управления траекторией заключается в том, что они не требуют новых датчиков и исполнительных механизмов. Они требуют стандартного оборудования ИВБ для измерений направления и стандартных измерений нагрузки и движения машин на поверхности: тяжелых буровых лебедок, насосов и верхнего привода. Они одинаково хорошо применимы к стационарным платформам и к плавучим суднам, при условии, что плавучее средство имеет подходящую систему компенсации вертикальной качки. Улучшения обеспечены за счет объединения усовершенствованных математических моделей с анализом стандартных данных о бурении с поверхности земли. Способ извлекает и использует уже имеющуюся информацию в данных о бурении с поверхности и метаданных для бурильной колонны и гидравлического забойного двигателя, но ранее не используемую в полном объеме. Это не значит, что дополнительные данные из скважины или данные с более высокой скоростью передачи не будут иметь значения. Высокоскоростные данные в режиме реального времени в данных о направлении и данных о нагрузке на долото, безусловно, обеспечат улучшение системы за счет устранения или уменьшения задержек по времени и неопределенностей, присущих оценке скважинных переменных, осуществляемой на поверхности.
Следует отметить, что упомянутые выше предпочтительные варианты осуществления иллюстрируют, а не ограничивают настоящее изобретение, при этом специалист в данной области техники сможет спроектировать много альтернативных вариантов осуществления, не выходя за пределы защиты, заданной прилагаемыми пунктами формулы изобретения. В пунктах формулы, любые номера позиций, находящиеся в круглых скобках, не следует рассматривать как ограничивающие пункты формулы. Использование глагола «содержать» и его спряжений не исключает наличия элементов или шагов, отличных от тех, что раскрыты в пункте формулы. Указание элементов в единственном числе, не исключают наличие множества таких элементов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ направленного бурения с коррекцией траектории скважины | 2019 |
|
RU2738227C2 |
| Способ направленного бурения с коррекцией траектории скважины | 2020 |
|
RU2734915C2 |
| БУРОВАЯ СИСТЕМА | 2008 |
|
RU2479706C2 |
| РОТОРНО-УПРАВЛЯЕМАЯ СИСТЕМА ДЛЯ БУРЕНИЯ СКВАЖИН С ЗАМКНУТЫМ ЦИКЛОМ ПРИНЯТИЯ РЕШЕНИЯ | 2021 |
|
RU2776547C1 |
| СПОСОБ КОНТРОЛЯ И УПРАВЛЕНИЯ ЗАБОЙНЫМИ ПАРАМЕТРАМИ РЕЖИМА БУРЕНИЯ | 2006 |
|
RU2354824C2 |
| РОТОРНАЯ УПРАВЛЯЕМАЯ СИСТЕМА С ЭЛЕКТРОПРИВОДОМ ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ДОЛОТА | 2017 |
|
RU2690238C1 |
| БУРИЛЬНОЕ УСТРОЙСТВО И СПОСОБ БУРЕНИЯ СТВОЛА | 2007 |
|
RU2405099C2 |
| СИСТЕМА, СПОСОБ И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ С КОМПЬЮТЕРНОЙ ПРОГРАММОЙ ДЛЯ ПРОГНОЗИРОВАНИЯ ГЕОМЕТРИИ СКВАЖИНЫ | 2011 |
|
RU2560462C2 |
| СПОСОБ ОПТИМИЗАЦИИ БУРЕНИЯ С ЗАБОЙНЫМ БЕСКОМПРЕССОРНЫМ ДВИГАТЕЛЕМ | 2011 |
|
RU2572629C2 |
| ВИНТОВОЙ ЗАБОЙНЫЙ ДВИГАТЕЛЬ ДЛЯ НАКЛОННО-НАПРАВЛЕННОГО И ГОРИЗОНТАЛЬНОГО БУРЕНИЯ | 2007 |
|
RU2324803C1 |
Изобретение относится к направленному бурению скважин. Техническим результатом является обеспечение быстрого и точного управления положением отклонителя, которое одновременно позволяет менять скорость нагнетания и нагрузку на долото для оптимизации скорости проходки. В частности, предложен способ управления направлением траектории ствола скважины во время наклонно-направленного турбинного бурения посредством бурильной колонны, имеющей буровое долото, приводимое гидравлическим забойным двигателем во вращение вокруг оси вращения бурового долота на ее нижнем конце, при этом направление оси вращения бурового долота определяет положение отклонителя. Причем указанный способ содержит следующие шаги: а1) оценивают потерю давления на гидравлическом забойном двигателе путем измерения давления бурового раствора; b1) используют результат оценки потери давления, полученный на шаге а1), для вычисления крутящего момента гидравлического забойного двигателя и с1) вычисляют угол реактивного скручивания бурильной колонны путем умножения вычисленного на шаге b1) крутящего момента на коэффициент податливости бурильной колонны при кручении, причем шаг а1) дополнительно содержит шаг включения какого-либо переходного давления бурового раствора в указанную оценку. Кроме того данный способ дополнительно содержит шаг d1), на котором вращают бурильную колонну с помощью средств вращения бурильной колонны, при этом угол, по существу, равен вычисленному углу реактивного скручивания, но имеет противоположное направление, при этом осуществляют прямую подачу вычисленного угла реактивного скручивания в контур управления средств вращения бурильной колонны для мгновенного регулирования положения отклонителя. Предложена также система для реализации указанного способа. 2 н. и 13 з.п. ф-лы, 5 ил.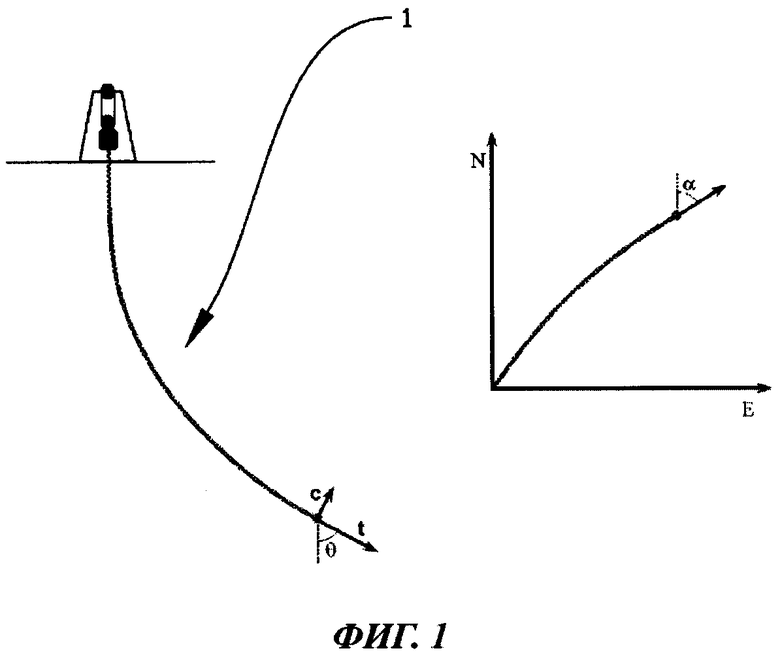
1. Способ управления направлением траектории ствола скважины во время наклонно-направленного турбинного бурения посредством бурильной колонны, имеющей буровое долото, приводимое гидравлическим забойным двигателем во вращение вокруг оси вращения бурового долота на ее нижнем конце, при этом направление оси вращения бурового долота определяет положение отклонителя, причем указанный способ содержит следующие шаги:
а1) оценивают потерю давления на гидравлическом забойном двигателе путем измерения давления бурового раствора;
b1) используют результат оценки потери давления, полученный на шаге а1), для вычисления крутящего момента гидравлического забойного двигателя и
с1) вычисляют угол реактивного скручивания бурильной колонны путем умножения вычисленного на шаге b1) крутящего момента на коэффициент податливости бурильной колонны при кручении, причем шаг а1) дополнительно содержит шаг включения какого-либо переходного давления бурового раствора в указанную оценку,
отличающийся тем, что данный способ дополнительно содержит шаг d1), на котором вращают бурильную колонну с помощью средств вращения бурильной колонны, при этом угол, по существу, равен вычисленному углу реактивного скручивания, но имеет противоположное направление, при этом осуществляют прямую подачу вычисленного угла реактивного скручивания в контур управления средств вращения бурильной колонны для мгновенного регулирования положения отклонителя.
2. Способ по п. 1, в котором шаг а1) дополнительно содержит шаг включения в него времени реагирования на изменение давления бурового раствора в указанную оценку.
3. Способ по п. 2, в котором шаг а1) включает в себя теоретическое определение времени реагирования на изменение давления бурового раствора.
4. Способ по п. 2 или 3, в котором шаг а1) включает в себя экспериментальное определение времени реагирования на изменение давления бурового раствора.
5. Способ по п. 2 или 3, в котором шаг а1) включает в себя использование принятой линейной связи между крутящим моментом бурового долота и нагрузкой на буровое долото для оценки времени реагирования на изменение давления бурового раствора.
6. Способ по п. 2 или 3, в котором шаг а1) дополнительно включает в себя использование фильтра низких частот для фильтрации высокочастотных компонентов из производной давления бурового раствора.
7. Способ по любому из пп. 1-3, в котором шаг с1) предусматривает оценку податливости бурильной колонны при кручении посредством модуля упругости при сдвиге и геометрических размеров бурильной колонны.
8. Способ по любому из пп. 1-3, в котором данный способ дополнительно включает в себя измерение крутящего момента бурильной колонны в скважине и крутящего момента бурильной колонны на поверхности и использование какой-либо разницы между измеренными крутящими моментами в качестве дополнительного упреждающего входного сигнала в контур управления средств вращения бурильной колонны.
9. Способ по любому из пп. 1-3, в котором данный способ дополнительно содержит следующие шаги:
измеряют текущее положение отклонителя и передают измеренное текущее положения отклонителя на поверхность;
сравнивают измеренное текущее положение отклонителя с требуемым положением отклонителя;
используют указанное измеренное текущее положение отклонителя в замкнутом контуре обратной связи для средств вращения бурильной колонны так, чтобы свести к минимуму ошибку между требуемым и измеренным положением отклонителя.
10. Способ по любому пп. 1-3, в котором данный способ дополнительно содержит шаг уменьшения величины кривизны ствола скважины путем изменения положения отклонителя вокруг заданного направления.
11. Способ по п. 10, в котором данный способ дополнительно содержит шаг управления величиной кривизны ствола скважины путем циклического изменения положения отклонителя.
12. Способ по п. 10, в котором данный способ дополнительно содержит шаг управления величиной кривизны ствола скважины путем вращения положения отклонителя, по существу, монотонно в одном направлении и изменения скорости вращения в зависимости от измеренного положения отклонителя.
13. Способ по п. 12, в котором данный способ дополнительно содержит шаг сохранения положения отклонителя на постоянном уровне в течение определенного периода времени и последующего вращения положения отклонителя на целое число оборотов при постоянной скорости вращения.
14. Способ по п. 10, в котором данный способ дополнительно содержит шаг управления величиной кривизны ствола скважины путем вращения положения отклонителя непрерывно с модулированной скоростью.
15. Система управления направлением траектории ствола скважины во время наклонно-направленного бурения, отличающаяся тем, что данная система содержит блок управления, выполненный с возможностью выполнения шагов способа по п. 1.
| СПОСОБ БУРЕНИЯ СКВАЖИНЫ И ОДНОВРЕМЕННОГО НАПРАВЛЕНИЯ БУРОВОЙ КОРОНКИ АКТИВНО УПРАВЛЯЕМОЙ ВРАЩАТЕЛЬНОЙ НАПРАВЛЯЕМОЙ БУРОВОЙ СИСТЕМОЙ И АКТИВНО УПРАВЛЯЕМАЯ ВРАЩАТЕЛЬНАЯ НАПРАВЛЯЕМАЯ СИСТЕМА | 1999 |
|
RU2239042C2 |
| УСТАНОВКА ДЛЯ ИСКЛЮЧЕНИЯ ЭФФЕКТИВНОГО КРУТЯЩЕГО МОМЕНТА БУРОВОГО ДОЛОТА И РЕГУЛИРОВАНИЯ ОТКЛОНЕНИЯ БУРОВОГО ДОЛОТА | 2007 |
|
RU2363844C1 |
| УПРАВЛЕНИЕ НАКЛОННО НАПРАВЛЕННЫМ БУРЕНИЕМ С ИСПОЛЬЗОВАНИЕМ ПЕРИОДИЧЕСКОГО ВОЗМУЩАЮЩЕГО ВОЗДЕЙСТВИЯ НА БУРОВОЕ ДОЛОТО | 2009 |
|
RU2428554C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО И СПОСОБЫ ДЛЯ НАКЛОННО-НАПРАВЛЕННОГО БУРЕНИЯ | 2008 |
|
RU2471980C2 |
| US 4697651 A1, 06.10.1987 | |||
| US 20120018218 A1, 26.01.2012. | |||

