Предлагаемый пеленгатор с широкоугольным коническим сканированием относится к области радиолокации и предназначен для определения угловых координат локационного объекта, являющегося источником радиоизлучения (ИРИ) или отражения радиоволн, одновременно в двух плоскостях пеленгации - азимутальной и угломестной.
Пеленгаторы, определяющие угловые координаты ИРИ за счет последовательного по времени изменения ориентации одного антенного луча, широко известны. Их главное преимущество состоит в простоте технической реализации радиолокационного приемника радиоизлучения, который, в отличие от аналогичных приемников моноимпульсных пеленгаторов [1], является одноканальным.
Известны двухплоскостные пеленгаторы [2, 3], которые выделяют информацию о двух угловых координатах ИРИ на основе последовательного по времени четырехтактного переключения ориентации одного узкого антенного луча («игольчатого» или «карандашного» типа) по четырем направлениям. Эти четыре направления имеют одинаковую широту углового смещения относительно опорного или равносигнального направления (РСН). (Для рассматриваемых пеленгаторов под РСН понимается направление, на котором равны сигналы, принимаемые последовательно по каждому из отстоящих друг относительно друга по времени направлений ориентации антенного луча). Указанные четыре направления расположены парами в азимутальной и угломестной плоскостях, причем каждая такая пара симметрична относительно РСН. В каждой плоскости пеленгации (азимутальной или угломестной) два направления ориентации антенного луча смещены друг относительно друга на угол, который обычно выбирается равным ширине диаграммы направленности (ДН) антенного луча по уровню половинной мощности [2, 3]. Таким образом, за четыре такта переключения ориентации антенного луча образуется пара азимутальных и пара угломестных пространственных каналов приема, которые разделяются с помощью временного стробирования. В результате попарного сравнения (вычитания) амплитуд сигналов двух азимутальных и двух угломестных пространственных каналов приема формируются оценки соответствующих угловых отклонений ИРИ относительно РСН по азимуту и по углу места (или угловых координат ИРИ, отсчитываемых относительно РСН).
В широко известном методе конического сканирования [2-8] последовательное четырехтактное переключение ориентации одного осесимметричного антенного луча заменено на непрерывное изменение направления его оси. При этом перемещение данной оси описывает в пространстве коническую поверхность с вершиной, находящейся в фазовом центре приема антенны, а ось такой конической поверхности совпадает с РСН. С целью независимого выделения оценок азимута и угла места ИРИ низкочастотная огибающая принимаемого сигнала ИРИ детектируется относительно двух ортогональных опорных сигналов проводимого конического сканирования. Варианты реализации метода конического сканирования представлены во многих печатных изданиях по радиолокации, например, в [2-8].
В известных реализациях метода конического сканирования используется осесимметричный антенный луч «карандашного» типа. Ширина этого антенного луча определяет раствор конической области пространства, в которой возможна пеленгация ИРИ и однозначны оценки двух его угловых координат (т.е. конической области пеленгации ИРИ). Очевидно, что расширение раствора такой области может быть обеспечено за счет увеличения ширины антенного луча, причем одновременно по двум ортогональным плоскостях его сечения (в силу осевой симметрии данного луча). Однако, такой технический прием влечет за собой значительный рост погрешности пеленгации ИРИ как ввиду снижения коэффициента усиления антенны, так и ввиду падения крутизны ската ДН антенного луча. Отсюда следует, что возможность расширения конической области пеленгации ИРИ ограничена значительными потерями в точности пеленгации ИРИ.
Под широкоугольным коническим сканированием будем понимать перемещение антенного луча по конической поверхности, раствор которой значительно превосходит минимальную ширину сечения данного луча (по уровню половинной мощности).
Известно широкоугольное сканирование, осуществляемое по линейному закону и применяемое в обзорных радиолокационных системах [2, 3, 8, 9], например, в радиолокационных станциях панорамного обзора. К такому типу широкоугольного сканирования привязаны методы пеленгации, основанные на линейном перемещении антенного луча в одной плоскости. Наиболее распространенными из них являются амплитудные методы выделения угловой координатной информации из временного положения огибающей принимаемого радиолокационного сигнала, который промодулирован линейно сканирующим антенным лучом. Технические реализации методов пеленгации обзорных радиолокационных систем представлены структурами и соответствующими алгоритмами в литературных источниках [2, 3, 7-9], где данные методы разделены согласно используемым процедурам оценки информационного временного параметра. Наряду с этим, известно также и применение фазовых методов пеленгации в обзорных радиолокационных системах, например, метода сканирования фазового центра [3].
Указанным методам пеленгации обзорных радиолокационных систем, основывающимся на линейном типе широкоугольного сканирования, присущи известные недостатки, касающиеся, в частности, малой точности пеленгации ИРИ, что показано в [3, 9]. Кроме того, реализации данных методов в виде структур, относятся, как правило, к одноплоскостной пеленгации (чаще всего - по азимуту).
Наиболее близким по большинству совпадающих с заявляемым пеленгатором существенных признаков, по мнению авторов, является пеленгатор, описанный в [10, с. 252, рис. 9.16].
Главный недостаток указанного пеленгатора-прототипа и известных пеленгаторов, являющихся аналогами заявляемого пеленгатора, состоит в небольшой ширине раствора конической области пеленгация ИРИ, в которой оценки двух его угловых координат однозначны. Использование в известных пеленгаторах осесимметричного антенного луча «карандашного» типа ограничивает возможность расширения раствора конической области пеленгации ИРИ ввиду необходимости соответствующего расширения ДН (причем, одновременно в двух плоскостях), что, как известно, сопряжено со следующими негативными обстоятельствами: а) снижением коэффициента направленного действия (КНД) антенны [11], следовательно, и отношения сигнал/шум (энергетического показателя); б) уменьшением пеленгационной чувствительности [1, 3, 4] (метрического показателя). Совместные потери по энергетическому и метрическому показателям приводят к значительному росту случайной (шумовой, флюктуационной) погрешности оценки каждой из двух угловых координат ИРИ.
В связи с этим, практический интерес представляет пеленгатор, основанный на структурном базисе пеленгатора-прототипа и позволяющий обеспечить наибольшую ширину раствора конической области пеленгации ИРИ при заданном уровне погрешности оценки каждой из двух его угловых координат, т.е. при существенно меньших потерях в точности пеленгации ИРИ по сравнению с пеленгатором-прототипом. Для количественного описания технического результата изобретения принимается мера возможного расширения раствора конической области пеленгации ИРИ при фиксированном среднеквадратическом отклонении (СКО) оценки каждой из двух угловых координат ИРИ от ее истинного значения.
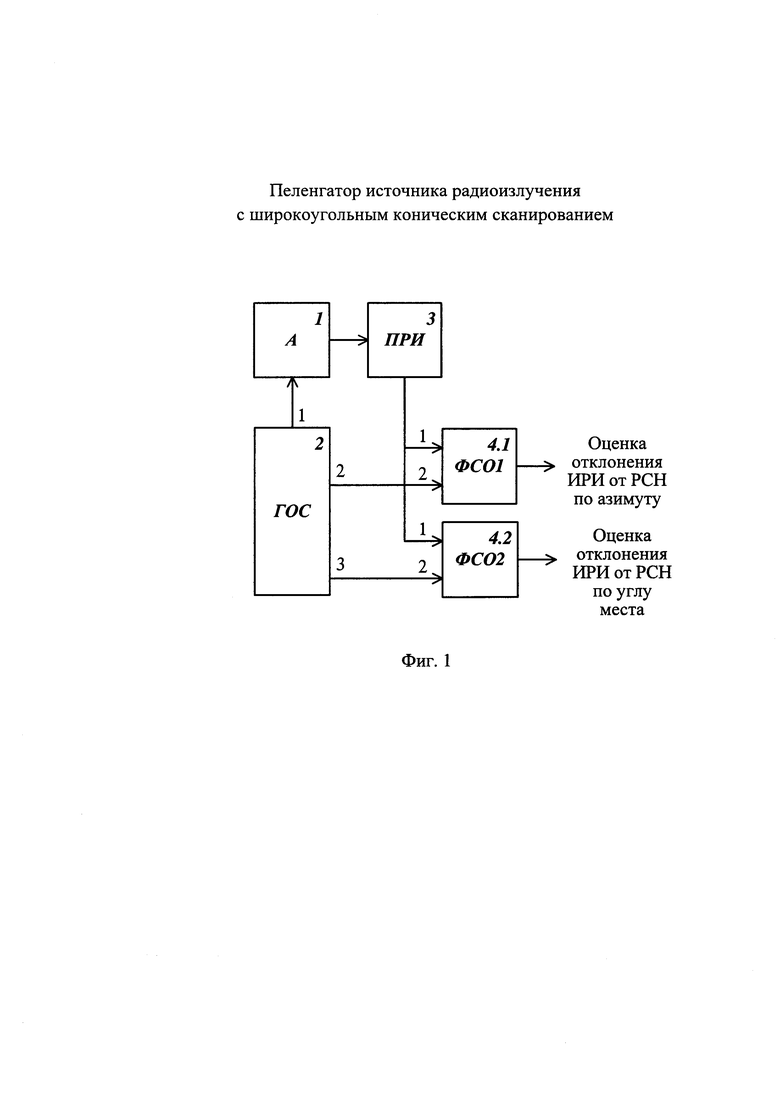
Пеленгатор-прототип (фиг. 1) содержит последовательно соединенные генератор опорных сигналов (ГОС), антенну (А) и приемник радиоизлучения (ПРИ), а также первый и второй формирователи сигналов отклонения (ФСО), первые входы которых соединены с выходом приемника радиоизлучения, а их вторые входы соединены соответственно с вторым и третьим выходами генератора опорных сигналов, при этом выходы первого и второго формирователей сигналов отклонения являются выходами пеленгатора-прототипа по азимуту и углу места соответственно.
Работа пеленгатора-прототипа происходит следующим образом.
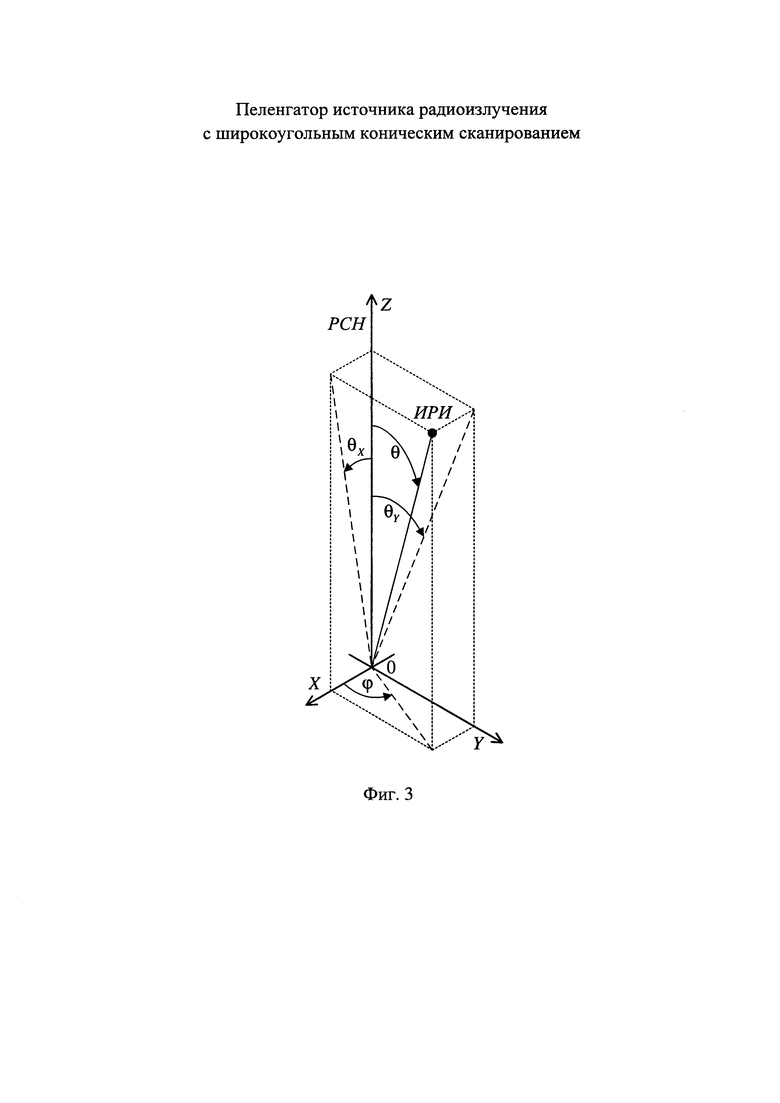
Сигнал от ИРИ приходит в виде потока мощности, который преобразуется антенной в электрический сигнал на ее выходе. Направление прихода этого потока мощности, являющееся направлением на ИРИ, иллюстрирует фиг. 3 в измерительной декартовой системе координат XYZ, где X0Z и Y0Z - соответственно азимутальная и угломестная плоскости пеленгации.
Из фиг. 3 видно, что пространственное положение ИРИ характеризуется двумя углами θX и θY между РСН и проекциями направления на ИРИ на плоскости X0Z и Y0Z соответственно. Наряду с этим, на фиг. 3 показаны также координаты ИРИ в измерительной сферической системе координат (связанной с системой координат XYZ): углы θ и ϕ - соответственно широта и долгота ИРИ. Пару углов θX и θY (или θ и ϕ) далее будем считать угловыми координатами ИРИ, отсчитываемыми относительно РСН.
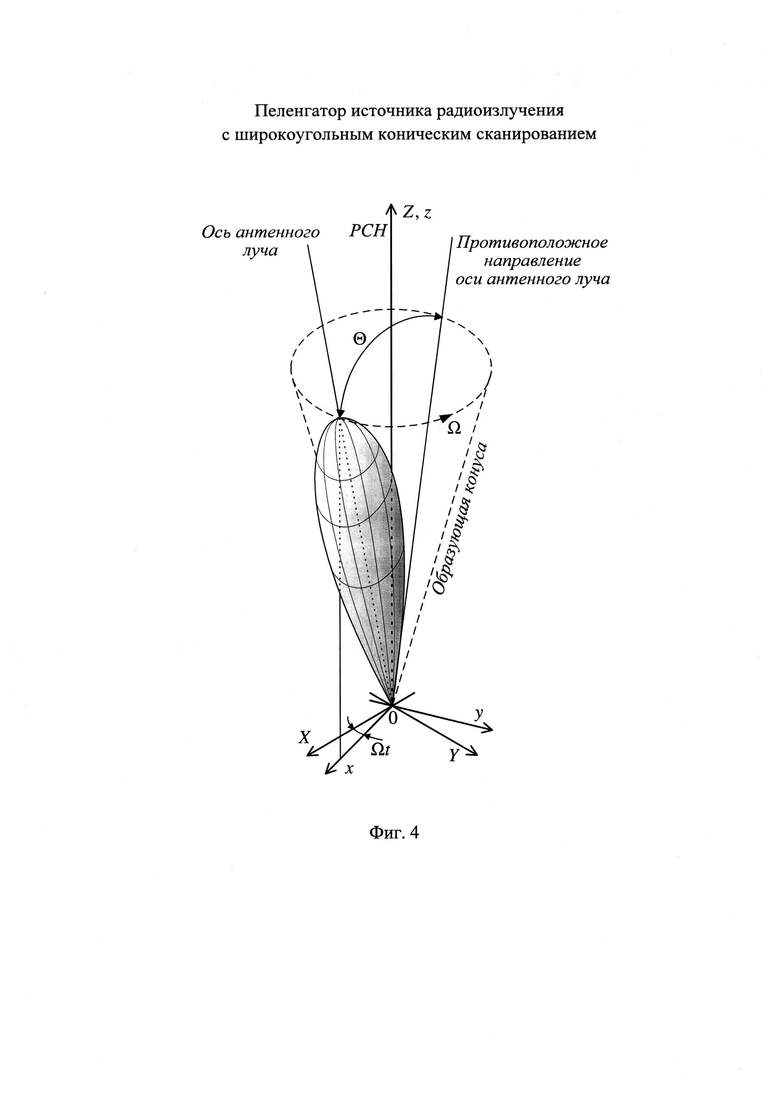
Работа пеленгатора-прототипа синхронизируется управляющим сигналом, который поступает с первого выхода ГОС на вход антенны, являющийся входом позиционирования оси ее луча по углу поворота в плоскости X0Y (по долготе сферической системы координат - фиг. 3). Данный управляющий сигнал задает непрерывное вращение антенного луча «карандашного» типа вокруг РСН (оси 0Z) с круговой частотой Ω, что обусловливает перемещение его оси по конической поверхности, имеющий раствор Θ (фиг. 4).
В дополнение к этому, фиг. 4 иллюстрирует непрерывное изменение угла поворота Ωt оси 0х декартовой системы координат xyz, связанной с антенным лучом, относительной оси 0Х измерительной системы координат XYZ. Поворот осуществляется относительно единой для двух координатных систем xyz и XYZ вертикальной оси РСН, которое совпадает с совмещенными осями 0Z и 0z.
Для описания ДН антенного луча в связанной с ним системе координат xyz будем использовать углы ϑx и ϑy между осью 0z и проекциями пространственного направления, характеризуемого данными углами, на плоскости x0z и y0z соответственно, аналогично углам θX и θY в системе координат XYZ (фиг. 3).
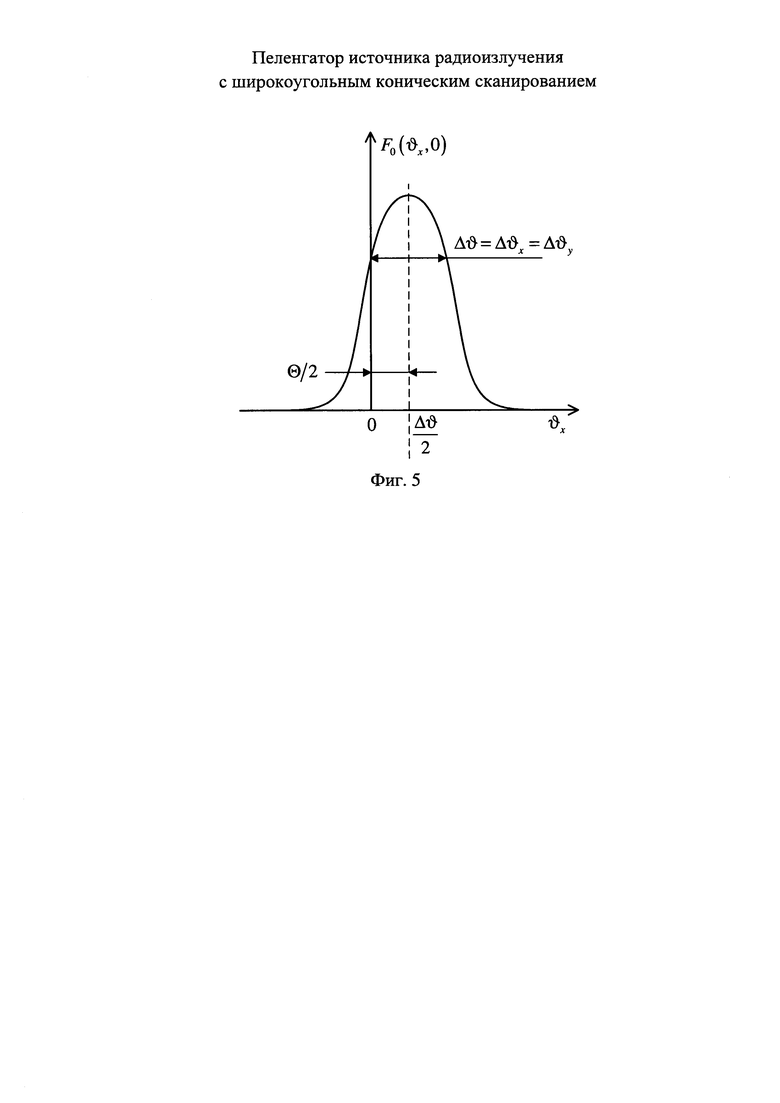
Типичный вид ДН сечения антенного луча «карандашного» типа F0(ϑx,0) в плоскости x0z представлен на фиг. 5. Плоскость x0z является плоскостью, в которой этот антенный луч имеет смещение относительно оси 0z. Это смещение, как видно из фиг. 5, зависит от ширины антенного луча «карандашного» типа Δϑ (по уровню половинной мощности) и может быть принят равным Δϑ/2.
Сигнал ИРИ с выхода антенны поступает на вход ПРИ, где осуществляется его усиление, частотно-временная обработка и выделение низкочастотной огибающей, амплитуда которой изменяется по времени синхронно с перемещением антенного луча. Кроме того, в ПРИ выполняется нормировка принимаемого сигнала ИРИ с помощью автоматической регулировки усиления (АРУ). Инерционность АРУ выбирается из соображений обеспечения неискаженного воспроизведения закона амплитудной модуляции, вносимой перемещением антенного луча [2, 8]. При этом можно считать, что действие АРУ сводится к замене текущего значения амплитуды принимаемого сигнала ИРИ на постоянный коэффициент kA в полосе частот, которые значительно меньше частоты Ω.
При отношениях сигнал/шум, обеспечивающих нормальное функционирование пеленгатора-прототипа, можно не учитывать небольшое смещение выходного сигнала ПРИ, сопровождающее амплитудное детектирование в условиях внутриприемного шума [12]. Это допущение позволяет описать выходной сигнал ПРИ пеленгатора-прототипа s0(θ,ϕ,t) как функцию времени и сферических координат ИРИ θ и ϕ (фиг. 3). Использование сферических координат упрощает дальнейшее изложение, при этом ДН перемещающегося антенного луча «карандашного» типа (фиг. 4) выражается с использованием следующих аргументов: F0(θ,Ωt-ϕ), а принимаемый сигнал ИРИ равен s0(θ,ϕ,t)=kAF0(θ,Ωt-ϕ).
С выхода ПРИ сигнал sо(θ,ϕ,t) поступает одновременно на первые входы первого и второго ФСО, которые производят обработку соответственно по азимутальной и угломестной плоскостям пеленгации. На вторые входы первого и второго ФСО поступают азимутальный и угломестный опорные сигналы сканирования uX(t)=UcosΩt и uY(t)=UsinΩt со второго и третьего выходов ГОС соответственно, где U - амплитуда опорных сигналов сканирования.
Каждый ФСО выполняет функцию перемножения двух входных сигналов с последующим выделением постоянной составляющей. Такая операция эквивалентна фазовому детектированию, реализуемому фазовым детектором [12, 14].
В результате обработки, проводимой в каждом из двух ФСО, формируются два сигнала, соответствующие оценкам угловых отклонений ИРИ от РСН (двух угловых координат ИРИ):  - на выходе первого ФСО для угла θX≅θcosϕ в плоскости X0Z,
- на выходе первого ФСО для угла θX≅θcosϕ в плоскости X0Z,  - на выходе второго ФСО для угла θY≅θsinϕ в плоскости Y0Z, где верхний индекс
- на выходе второго ФСО для угла θY≅θsinϕ в плоскости Y0Z, где верхний индекс  указывает на принадлежность данных оценок пеленгатору-прототипу (здесь и далее).
указывает на принадлежность данных оценок пеленгатору-прототипу (здесь и далее).
Оценки  и
и  воспроизводятся в виде сигналов на выходах первого и второго ФСО, совпадающих с выходами пеленгатора-прототипа соответственно по азимуту и углу места (фиг. 1), и являются результатом работы пеленгатора-прототипа.
воспроизводятся в виде сигналов на выходах первого и второго ФСО, совпадающих с выходами пеленгатора-прототипа соответственно по азимуту и углу места (фиг. 1), и являются результатом работы пеленгатора-прототипа.
Математические операции, проводимые в первом и втором ФСО на периоде сканирования T=2π/Ω антенного луча, имеют соответствующие записи:

где  - амплитудный коэффициент n-й гармоники спектрального разложения [13] сканирующей ДН F0(θ,Ωt-ϕ) (
- амплитудный коэффициент n-й гармоники спектрального разложения [13] сканирующей ДН F0(θ,Ωt-ϕ) ( - соответственно для первой гармоники), kS - коэффициент передачи одного ФСО, kε=kSkAU - коэффициент пропорциональности для рассматриваемых оценок.
- соответственно для первой гармоники), kS - коэффициент передачи одного ФСО, kε=kSkAU - коэффициент пропорциональности для рассматриваемых оценок.
Из (1) видно, что оценки  и
и  пропорциональны амплитуде первой гармоники спектрального разложения принимаемого сигнала ИРИ, при этом остальные гармоники данного разложения отсекаются, что аналогичным образом показано в [2].
пропорциональны амплитуде первой гармоники спектрального разложения принимаемого сигнала ИРИ, при этом остальные гармоники данного разложения отсекаются, что аналогичным образом показано в [2].
Зависимость оценки  от угла θX при θY=0 (ϕ=0), являющаяся пеленгационной характеристикой (ПХ) пеленгатора-прототипа в плоскости X0Z, определяется зависимостью
от угла θX при θY=0 (ϕ=0), являющаяся пеленгационной характеристикой (ПХ) пеленгатора-прототипа в плоскости X0Z, определяется зависимостью  (с точностью до постоянного коэффициента). Аналогично, зависимость оценки
(с точностью до постоянного коэффициента). Аналогично, зависимость оценки  от угла θY при θX=0 (ϕ=π/2) или ПХ пеленгатора-прототипа в плоскости Y0Z также определяется зависимостью
от угла θY при θX=0 (ϕ=π/2) или ПХ пеленгатора-прототипа в плоскости Y0Z также определяется зависимостью  . Следовательно, две указанные ПХ совпадают между собой ввиду тождественности условий их формирования при коническом сканировании.
. Следовательно, две указанные ПХ совпадают между собой ввиду тождественности условий их формирования при коническом сканировании.
В силу описанных свойств ПХ, в обосновании технического результата изобретения удобно использовать оценку  для широты ИРИ
для широты ИРИ  , которая равна
, которая равна  . Зависимость оценки от угла θ определена для значений θ≥0 и совпадает с правыми ветвями ПХ по плоскостям X0Z и Y0Z, что следует из (1).
. Зависимость оценки от угла θ определена для значений θ≥0 и совпадает с правыми ветвями ПХ по плоскостям X0Z и Y0Z, что следует из (1).
Ранее указывалось, что основным функциональным показателем, отражающим технический результат изобретения, является ширина раствора конической области пеленгации ИРИ, которая определяется расстоянием между минимумом и максимумом ПХ. Поэтому, с целью сравнения заявляемого пеленгатора с пеленгатором-прототипом по основному функциональному показателю можно использовать как одну из центрально симметричных ПХ (в плоскости X0Z или Y0Z), так и соответствующую зависимость оценки широты ИРИ от угла θ.
Технический результат от использования заявляемого пеленгатора состоит в расширении раствора конической области двухплоскостной пеленгации ИРИ при фиксированном уровне погрешности оценки каждой из двух его угловых координат.
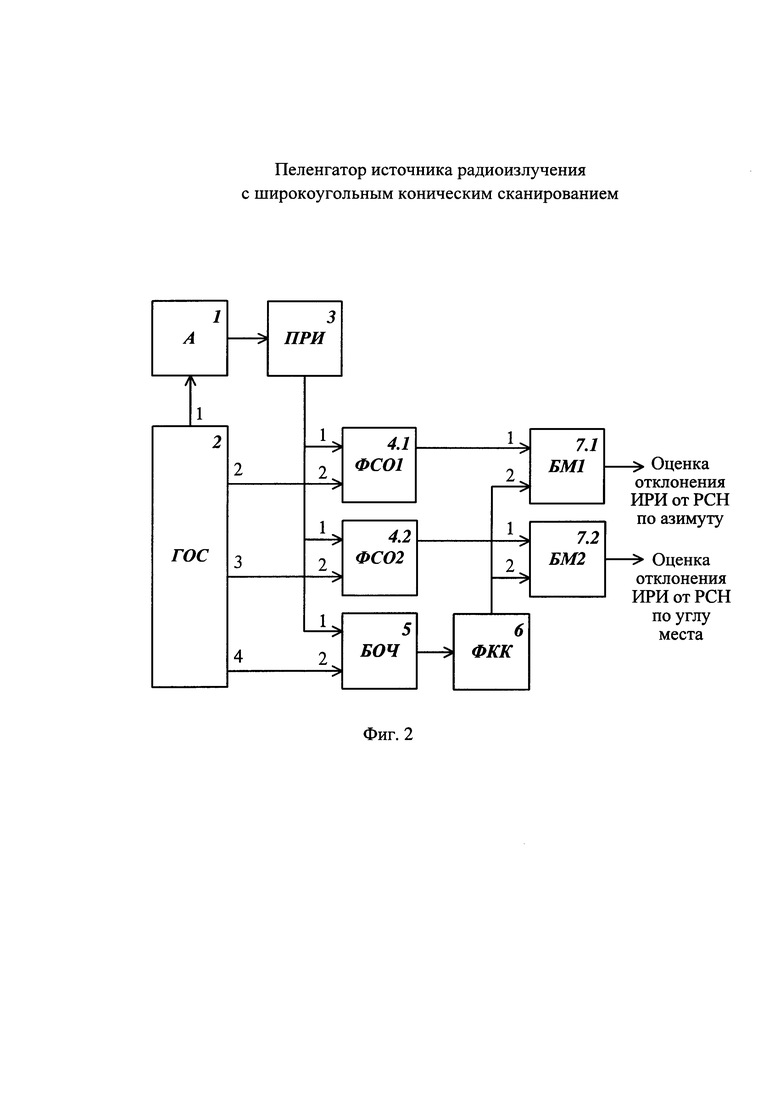
Для достижения указанного технического результата в пеленгаторе источника радиоизлучения, содержащем, так же как и пеленгатор-прототип, последовательно соединенные генератор опорных сигналов, антенну и приемник радиоизлучения, а также первый и второй формирователи сигналов отклонения, первые входы которых соединены с выходом приемника радиоизлучения, а их вторые входы соединены соответственно с вторым и третьим выходами генератора опорных сигналов, введено расширение антенного луча в одной плоскости, которая проходит через ось его вращения, а также введены последовательно соединенные блок оценки частоты и формирователь корректирующей компоненты, а также первый и второй блоки масштабирования, первые входы которых соединены соответственно с выходами первого и второго формирователей сигналов отклонения, первый и второй входы блока оценки частоты подключены соответственно к выходу приемника радиоизлучения и четвертому выходу генератора опорных сигналов, вторые входы первого и второго блоков масштабирования совместно подключены к выходу формирователя корректирующей компоненты, а их выходы являются выходами заявляемого пеленгатора.
В известных пеленгаторах, использующих метод конического сканирования, не содержится признаков, отличающих заявляемый пеленгатор от пеленгатора-прототипа. Применение в заявляемом пеленгаторе модифицированного антенного луча вместе с вновь вводимыми блоками и связями позволяет обеспечить расширенный (относительно известных пеленгаторов) раствор конической области пространства, в которой возможна пеленгация ИРИ при фиксированном уровне погрешности оценки каждой из двух его угловых координат.
Во многих практических применениях пеленгаторов, использующих метод конического сканирования, существенное значение имеет ширина раствора конической области пеленгации ИРИ, в которой однозначны оценки его угловых координат. В частности, это относится к ситуации, когда антенна пеленгатора жестко связана с его подвижным носителем (платформой). Пространственные эволюции этого носителя сопровождаются изменениями ориентации антенного луча (например, ввиду непостоянства углов рыскания и тангажа беспилотного летательного аппарата [15]), которые не всегда могут быть полностью скомпенсированы [16, 17].
Изобретение направлено на расширение раствора конической области пеленгации ИРИ, а технический результат изобретения достигается за счет следующих двух черт заявляемого пеленгатора, которые отличают его от пеленгатора-прототипа.
1. Использования широкоугольного конического сканирования антенным лучом «веерного» типа, подобно радиолокационным станциям панорамного обзора [2, 3, 5, 8]. Такой антенный луч имеет расширенную ДН только в одной плоскости, проходящей через ось конической поверхности его перемещения. Результатом сканирования данным антенным лучом является охват широкой конической области пространства, в которой возможна пеленгация ИРИ.
2. Введения в функциональную схему пеленгатора-прототипа новых блоков и связей, обеспечивающих извлечение оценок угловых координат ИРИ с учетом специфики амплитудной модуляции принимаемого сигнала ИРИ, связанной с использованием антенного луча «веерного» типа. Специфика этой модуляции позволяет совместить метод пеленгации, используемый в пеленгаторе-прототипе, с вводимым в заявляемый пеленгатор дополнительным методом, состоящем в оценке времени контакта с ИРИ с целью выделения информации об угловом положении ИРИ в пределах всей широкой конической области сканирования антенного луча «веерного» типа.
Рассмотрим поочередно каждый из двух отмеченных пунктов.
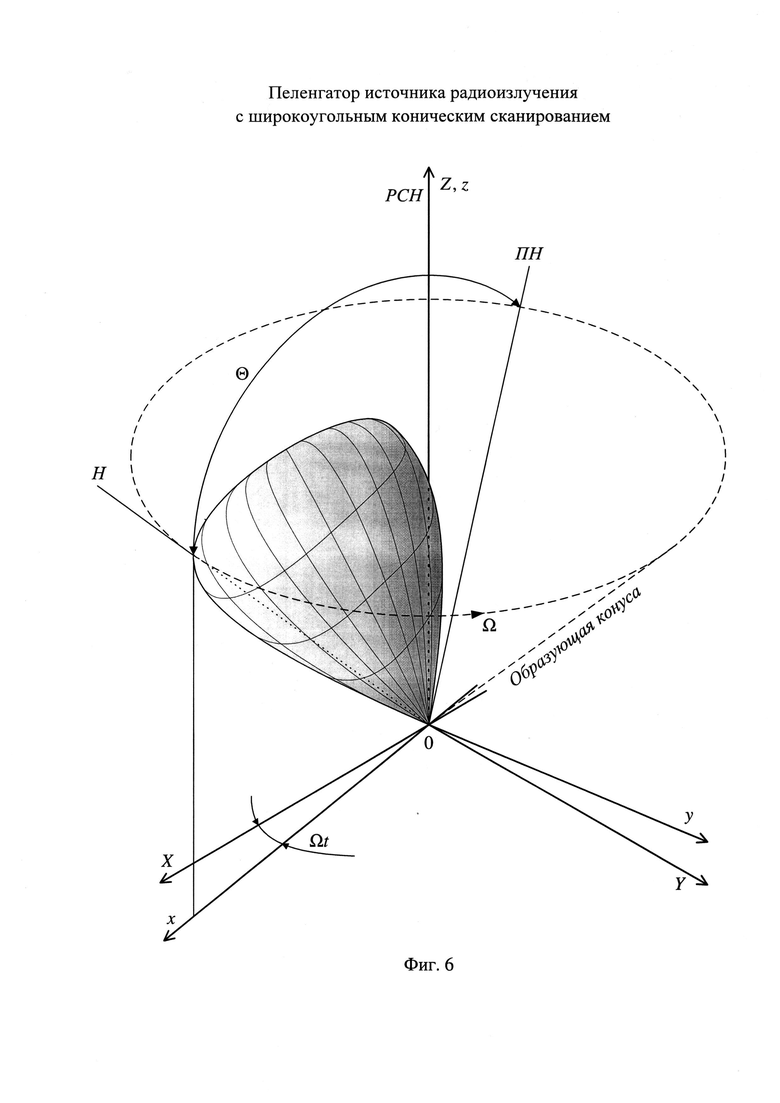
При коническом сканировании ось луча антенны перемещается по конической поверхности, а система координат xyz, связанная с данным антенным лучом, вращается вокруг оси РСН (совпадающей с осями 0z и 0Z) с угловой скоростью Ω относительно измерительной системы координат XYZ, что иллюстрирует фиг. 4 для пеленгатора-прототипа и фиг. 6 - для заявляемого пеленгатора.
Раствор 0 конической поверхности, образуемой за счет перемещения антенного луча «карандашного» типа в пеленгаторе-прототипе (фиг. 4), определяется углом между двумя направлениями оси данного луча в два момента времени, которые отстоят друг от друга на половину периода сканирования Т/2=π/Ω.
Направление Н антенного луча «веерного» типа, перемещение которого формирует коническою поверхность с расширенным раствором Θ (фиг. 6), соответствует дальней (относительно РСН) границе плоского вершинного участка ДН данного луча. При этом раствор Θ определяется как угол между направлением Н и противоположным ему направлением ПН, которое смещено по времени на T/2.
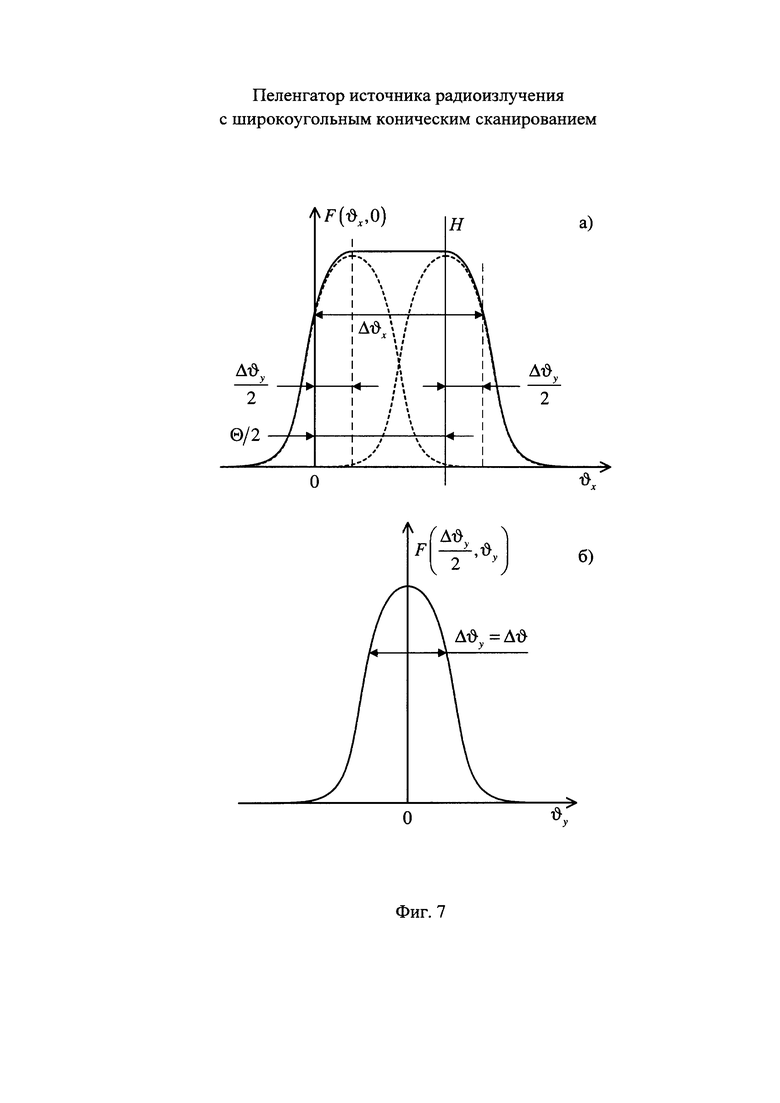
Аналитические связи раствора Θ с параметрами антенных лучей «карандашного» и «веерного» типов нетрудно установить на основе фиг. 5 и 7, где соответственно показаны ДН данных антенных лучей. При описании ДН каждого антенного луча в системе координат xyz используются углы ϑx и ϑy между осью 0z и проекциями пространственного направления, характеризуемого данными углами, на плоскости x0z и y0z соответственно. Параметры ширины рассматриваемых антенных лучей определяются по уровню половинной мощности: Δϑx - в плоскости x0z и Δϑy - в плоскости y0z. На фиг. 5 изображено сечение ДН антенного луча «карандашного» типа в плоскости x0z, а на фиг. 7 - сечения ДН антенного луча «веерного» типа: а) в плоскости x0z; б) в плоскости, которая ортогональна плоскости x0z и имеет смещение Δϑy/2 по оси ϑх.
В случае антенного луча «карандашного» типа, используемого в пеленгаторе-прототипе, справедливо равенство Δϑx=Δϑy=Δϑ, а из фиг. 5 следует, что раствор Θ равен ширине Δϑ при пересечении ДН F0(ϑx,0) этого антенного луча оси 0z на уровне  . (Данное численное значение принято с целью упрощения изложения, хотя возможны и другие численные значения [2, 18]). Величина Δϑ принимается как базовая ширина антенного луча, которая соответствует заданным размерам антенны, длине волны λ, а также амплитудно-фазовому распределению поля в раскрыве антенны. Например: Δϑ≅59λ/d, град - в случае равномерного синфазного возбуждения круглого раскрыва антенны диаметром d [11].
. (Данное численное значение принято с целью упрощения изложения, хотя возможны и другие численные значения [2, 18]). Величина Δϑ принимается как базовая ширина антенного луча, которая соответствует заданным размерам антенны, длине волны λ, а также амплитудно-фазовому распределению поля в раскрыве антенны. Например: Δϑ≅59λ/d, град - в случае равномерного синфазного возбуждения круглого раскрыва антенны диаметром d [11].
Антенный луч «веерного» типа, использование которого отличает заявляемый пеленгатор от пеленгатора-прототипа, будем характеризовать коэффициентом а, отражающим различие параметров ширины данного луча в плоскостях x0z и y0z в виде: а=Δϑх/Δϑy.
Формирование ДН антенного луча «веерного» типа может быть реализовано через комбинацию нескольких (минимум - двух) парциальных ДН, имеющих различные смещения в плоскости x0z, пример которых показан на фиг. 7, а пунктиром. При этом каждая такая парциальная ДН описывает антенный луч «карандашного» типа с одним параметром ширины Δϑ, а в результате линейной комбинации нескольких парциальных ДН с различными смещениями только в плоскости x0z нетрудно получить Δϑx=aΔϑ. В плоскости, ортогональной плоскости x0z, смещения рассматриваемых парциальных ДН отсутствуют, следовательно: Δϑy=Δϑ, что иллюстрирует фиг. 7, б.
С учетом проведенных рассуждений и иллюстрации сечения антенного луча «веерного» типа в плоскости x0z (фиг. 7, а), проходящей через ось конической поверхности сканирования и направление Н (фиг. 6 и 7, а), раствор данной конической поверхности для заявляемого пеленгатора будет равен

Установим далее связь между параметрами ширины двух рассматриваемых типов антенных лучей и погрешностью оценки каждой из двух угловых координат ИРИ (погрешностью пеленгации ИРИ). Наиболее важным показателем данной погрешности считается ее среднеквадратическое отклонение (СКО) σ на РСН [6]. Это СКО для метода конического сканирования, как известно [18], равно

где kσ - коэффициент пропорциональности для СКО σ, μ - крутизна ската ДН антенного луча на РСН в плоскости x0z, q - отношение сигнал/шум по мощности в полосе приема.
Из фиг. 5 и 7, а видно, что в обоих случаях величина μ обратно пропорциональна ширине Δϑ=Δϑy и может быть описана известным [1, 18] выражением: μ=kμ/Δϑ, где kμ - коэффициент пропорциональности для μ.
Величину q нетрудно найти по уравнению дальности радиолокации [19] для пассивного режима наблюдения ИРИ (однолучевого приема): q=kqD, где коэффициент kq включает в себя все остальные параметры, входящие в уравнение дальности радиолокации (плотность потока мощности сигнала ИРИ, спектральную плотность мощности шума, полосу приема и т.д. [7, 19]); D - коэффициент направленного действия (КНД) антенны.
Связь энергетического параметра КНД с параметрами ширины ДН установим на основе асимптотического выражения из [11], применяемого для практических расчетов. Используя введенный выше параметр а, запишем это выражение в виде:

где kD≅32000 град2 при исчислении углов в град.
Подставляя (4) в пропорциональность для отношения сигнал/шум, определяемую уравнением дальности радиолокации для пассивного режима, имеем:

Таким образом, ширина антенного луча в рассматриваемом контексте является не только метрическим, но и энергетическим параметром, что в обобщенной форме изложено в [20]. Совместное влияние величин Δϑ и a на СКО σ нетрудно описать, подставляя (5) в (3) и выражая крутизну μ через ширину Δλ. Тогда:

где  - коэффициент, связывающий СКО погрешности пеленгации ИРИ с параметрами ширины антенного луча.
- коэффициент, связывающий СКО погрешности пеленгации ИРИ с параметрами ширины антенного луча.
Анализируя совместно (2) и (6), можно видеть, что увеличение раствора Θ в 2a - 1 раз (при неизменной ширине Δϑ) сопряжено с потерей точности пеленгации ИРИ, выражающейся в увеличении СКО σ в  раз. Если считать, что раствор Θ задается через превышение ширины Δϑ в κ раз - в виде Θ=κΔϑ, то соответствующее СКО будет равно:
раз. Если считать, что раствор Θ задается через превышение ширины Δϑ в κ раз - в виде Θ=κΔϑ, то соответствующее СКО будет равно:

Описанная взаимосвязь относится только к заявляемому пеленгатору и определяется через параметр а антенного луча «веерного» типа.
В случае пеленгатора-прототипа, имеющего антенный луч «карандашного» типа с параметрами Δϑx=Δϑy=Δϑ (a=1), желание увеличить раствор Θ в κ раз реализуемо исключительно за счет соответствующего увеличения ширины Δϑ одновременно в двух плоскостях x0z и y0z (ввиду осевой симметрии данного луча), что приводит к: а) уменьшению КНД в κ2 раз, соответственно и величины q; б) уменьшению крутизны μ в κ раз. Оба эти обстоятельства согласно (3) влекут за собой существенный рост СКО σ0 пеленгатора-прототипа, причем:

Сравнение случаев «веерного» и «карандашного» типов антенных лучей, соответствующих заявляемому пеленгатору и пеленгатору-прототипу, можно провести по (7) и (8), исходно задавая допустимую потерю точности пеленгации ИРИ и определяя при этом возможное расширение раствора Θ. Результаты такого сравнения, показывающие возможное расширение раствора Θ для двух рассматриваемых типов антенных лучей, при увеличении СКО погрешности пеленгации ИРИ с шагом 1 дБ представлены в таблице. В последнем столбце данной таблицы приводится количественное выражение технического результата изобретения, определяемое отношением показателей расширения κ в случаях заявляемого пеленгатора и пеленгатора-прототипа.
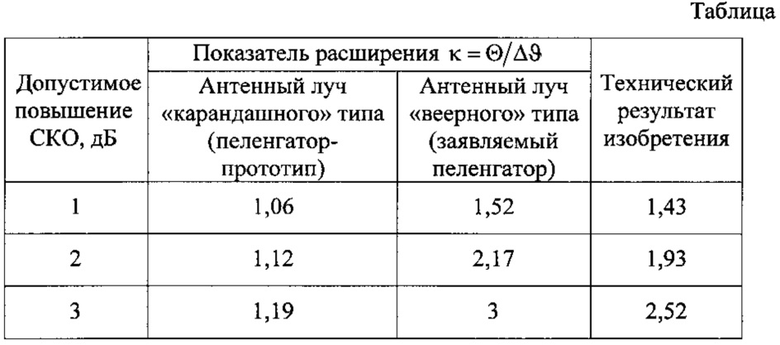
Результаты расчетов по (7) и (8) говорят о том, что, например, требование двукратного расширения раствора конической области пеленгации ИРИ (κ=2) влечет за собой увеличение СКО σ только в  раз (примерно на 1,8 дБ) в случае заявляемого пеленгатора, тогда как в случае пеленгатора-прототипа - очень значительное увеличение СКО σ0 в 4 раза (или на 12 дБ, поскольку κ2=4), что ограничивает применимость такого типа антенного луча при изложенных выше требованиях к пеленгации ИРИ.
раз (примерно на 1,8 дБ) в случае заявляемого пеленгатора, тогда как в случае пеленгатора-прототипа - очень значительное увеличение СКО σ0 в 4 раза (или на 12 дБ, поскольку κ2=4), что ограничивает применимость такого типа антенного луча при изложенных выше требованиях к пеленгации ИРИ.
Наряду с положительным эффектом от использования антенного луча «веерного» типа, следует иметь в виду, что технический результат изобретения, представленный в таблице, достигается только при введении в функциональную схему пеленгатора-прототипа новых блоков и связей. Наличие этих блоков и связей определяется необходимостью формирования оценок двух угловых координат ИРИ (в азимутальной и угломестной плоскостях) в пределах всей широкой конической области пространства, охватываемой антенным лучом «веерного» типа при сканировании.
Обращаясь к фиг. 7, а, нетрудно видеть диапазон углов ϑx, в пределах которого ДН антенного луча «веерного» типа почти постоянна - имеет плоский вершинный участок. В этом диапазоне углов метод конического сканирования, используемый как и в пеленгаторе-прототипе, дополняется методом извлечения угловой координатной информации об ИРИ, учитывающим специфику амплитудной модуляции принимаемого сигнала ИРИ (вносимой плоском вершинным участком ДН антенного луча «веерного» типа).
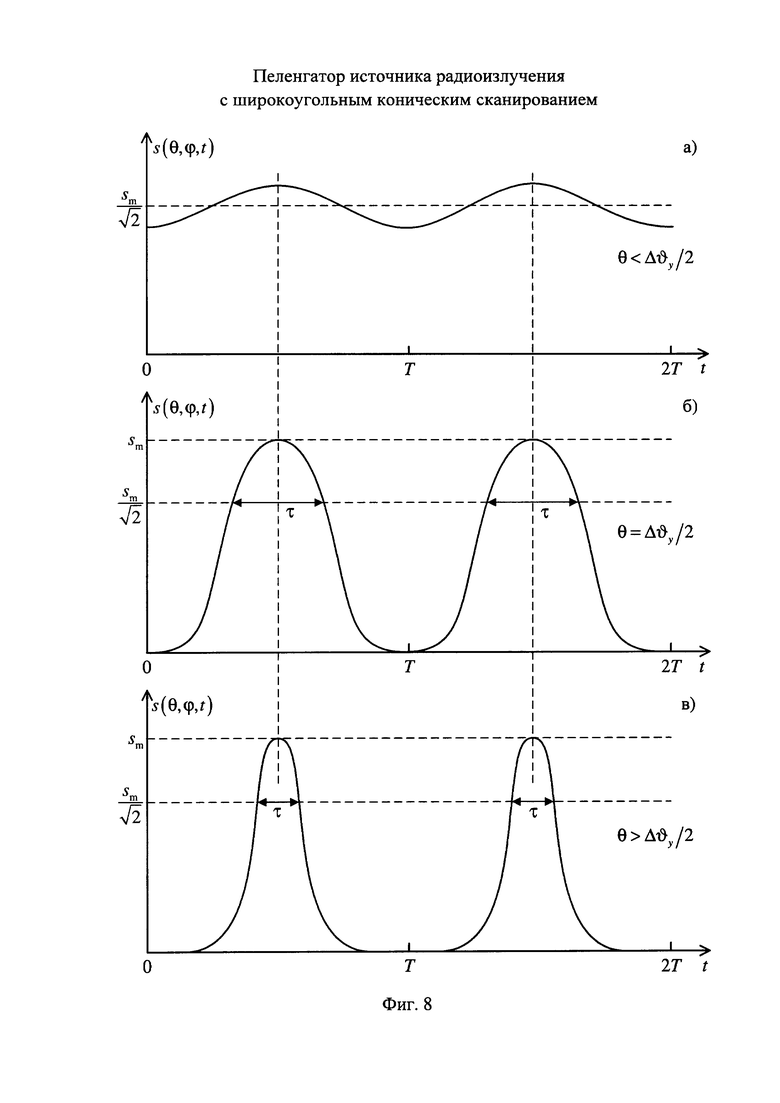
Отмеченную специфику амплитудной модуляции нетрудно проследить по фиг. 8, где показаны временные диаграммы принимаемого сигнала ИРИ при трех значениях широты ИРИ θ: а) θ<Δϑy/2, б) θ=Δϑy/2, в) θ>Δϑy/2.
Из фиг. 8, в видно, что в ситуации, когда угол θ выходит за переделы начального наклонного участка рассматриваемой ДН (ската ДН, пересекающего РСН), основная информация о широте ИРИ θ содержится во временном интервале τ - времени контакта с ИРИ. Время τ характеризует продолжительность единичного амплитудного отклика при прохождении «веерным» антенным лучом направления на ИРИ (в пределах одного периода сканирования).
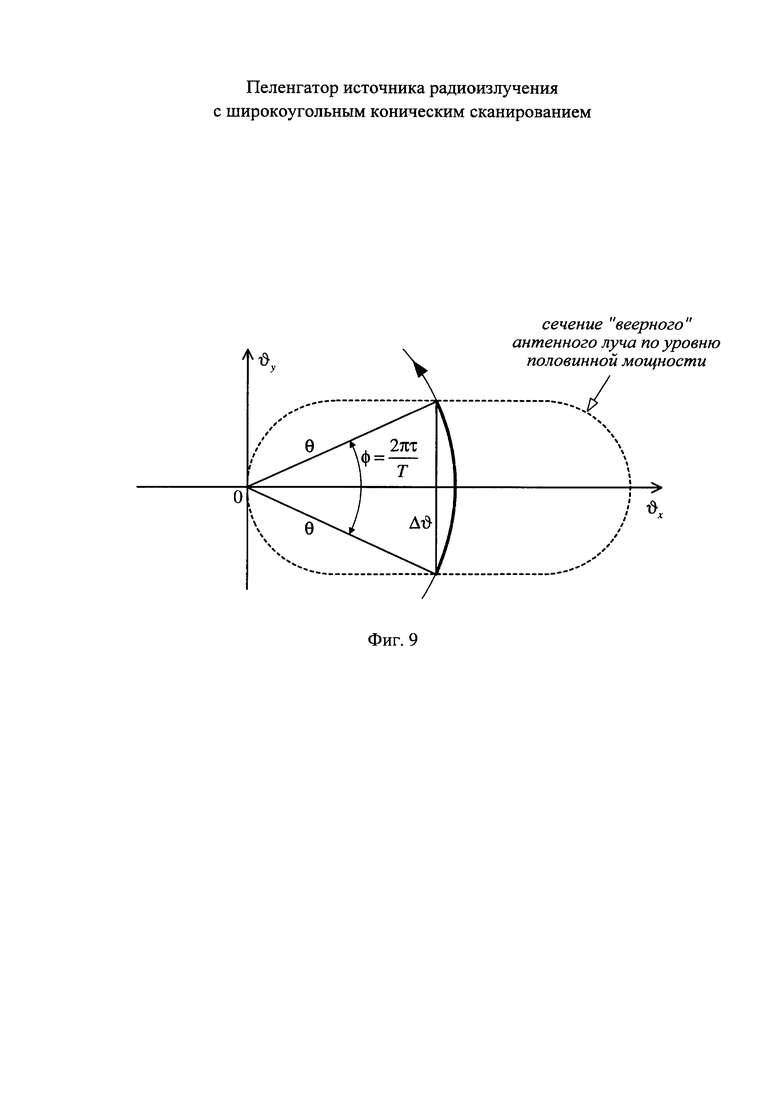
Связь между величинами τ и θ опишем на основе фиг. 9, где пунктиром показано сечение ДН «веерного» луча антенны по уровню половинной мощности в плоскости угловых координат ϑx и ϑy.
Жирной линией на фиг. 9 выделена дуга контакта с ИРИ. Этот контакт имеет место, когда значение ДН, соответствующее направлению на ИРИ, превышает  от своего максимального значения (т.е. превосходит уровень половинной мощности). Из фиг. 9 видно, что дуга контакта с ИРИ ограничена углом φ=2πτ/Т, где Т=2π/Ω - период сканирования.
от своего максимального значения (т.е. превосходит уровень половинной мощности). Из фиг. 9 видно, что дуга контакта с ИРИ ограничена углом φ=2πτ/Т, где Т=2π/Ω - период сканирования.
Углы θ и Δϑ представлены в плоскости угловых координат ϑx и ϑy отрезками (фиг. 9), которые образуют равнобедренный треугольник. При этом считается, что ширина ДН антенного луча «веерного» типа в плоскости, ортогональной плоскости x0z, равна базовой ширине: Δϑy=Δϑ. Исходя из изображенного на фиг. 9 треугольника, имеем: θsin(φ/2)=Δϑ/2, что, с учетом отмеченного выше равенства для угла φ, приводит к выражению:

Для определения времени τ воспользуемся известным [7, 20] методом оценки неэнергетического параметра посредством эквивалентного гармонического представления информационного процесса, в котором содержится данный параметр. Отметим, что на интервале времени τ такой эквивалентный гармонический процесс превышает уровень, равный  от своего амплитудного значения. Для гармонического процесса указанное превышение имеет место только на четверти его периода, следовательно:
от своего амплитудного значения. Для гармонического процесса указанное превышение имеет место только на четверти его периода, следовательно:

где  - частота эквивалентного гармонического процесса [7, 20] (часто: эффективная ширина [12] или среднеквадратическая частота [21] спектральной плотности указанного процесса); коэффициент "4" обусловлен принятым в качестве порогового для контакта с ИРИ уровнем
- частота эквивалентного гармонического процесса [7, 20] (часто: эффективная ширина [12] или среднеквадратическая частота [21] спектральной плотности указанного процесса); коэффициент "4" обусловлен принятым в качестве порогового для контакта с ИРИ уровнем  от максимума ДН;
от максимума ДН;  - коэффициент, учитывающий форму сечения ДН антенного луча «веерного» типа в плоскости y0z (предварительно проведенные численные расчеты по реальным ДН круглой антенны показали, что приближенно можно полагать
- коэффициент, учитывающий форму сечения ДН антенного луча «веерного» типа в плоскости y0z (предварительно проведенные численные расчеты по реальным ДН круглой антенны показали, что приближенно можно полагать  ).
).
Подстановка (10) в (9) приводит к простому выражению:

где  - коэффициент пропорциональности между
- коэффициент пропорциональности между  и θ.
и θ.
Частота  определяется непосредственно принимаемым сигналом ИРИ s(θ,ϕ,t) согласно известной [7, 20, 21] формуле:
определяется непосредственно принимаемым сигналом ИРИ s(θ,ϕ,t) согласно известной [7, 20, 21] формуле:

Оценка широты ИРИ θ, вычисляемая на основе (11) и (12), используется в заявляемом пеленгаторе для коррекции каждой из двух исходных оценок εX и εY углов θX и θY соответственно (угловых координат ИРИ относительно РСН), которые формируются методом конического сканирования.
Зависимости оценок εX и εY от соответствующих угловых координат θx и θY (при равенстве нулю ортогональных угловых координат) представляют собой исходные или нескорректированные ПХ в плоскостях X0Z и Y0Z. Причем, обе зависимости εX(θX) и εY(θY) совпадают друг с другом с точностью до обозначений, а их вид показан на фиг. 10, а пунктиром. Данное совпадение определяется тождественными условиями формирования двух оценок εX и εY при коническом сканировании, что показано при описании работы пеленгатора-прототипа.
Кроме того, обе указанные ПХ центрально симметричны: εX(-θX)=-εX(θX) и εY(-θY)=-εY(θY). При этом зависимость εX(Y)(θX(Y)) имеет экстремумы в точках с координатой  , а также спады при
, а также спады при  , обусловленные соответствующим уменьшением времени τ - фиг. 8, в.
, обусловленные соответствующим уменьшением времени τ - фиг. 8, в.
Коррекция оценок εX и εY вводится с целью расширения рабочего диапазона по соответствующим углам θX и θY, что означает расширение раствора Θ конической области пеленгации ИРИ. В переделах указанного рабочего диапазона обеспечивается линейность и однозначность преобразования каждой из двух угловых координат ИРИ в ее оценку.
В заявляемом пеленгаторе применяется мультипликативная коррекция, состоящая в масштабировании исходных оценок εX и εY за счет умножения каждой из них на корректирующую компоненту g(θ), обладающую следующими свойствами:
а) симметрией относительно оси 0Z в каждой из плоскостей X0Z и Y0Z ввиду зависимости от аргумента θ, являющего абсолютной величиной углового отклонения ИРИ от РСН;
б) единичным значением в пределах начальных линейных участков двух исходных нескорректированных ПХ по двум плоскостям пеленгации;
в) при увеличении θ в области  , компонента g(θ) возрастает таким образом, что достигается не только компенсация спадов зависимостей εX(θX) и εY(θY) в данной области, но и продолжение (растяжение) линейных участков этих зависимостей при
, компонента g(θ) возрастает таким образом, что достигается не только компенсация спадов зависимостей εX(θX) и εY(θY) в данной области, но и продолжение (растяжение) линейных участков этих зависимостей при  и
и  соответственно.
соответственно.
С достаточной для практики точностью указанные выше свойства компоненты g(θ) удовлетворяются при ее формировании в виде:

где  - коэффициент, уточняемый исходя из данных ο ДН конкретного антенного луча «веерного» типа. Величина
- коэффициент, уточняемый исходя из данных ο ДН конкретного антенного луча «веерного» типа. Величина  задает точку сопряжения плоского линейного и квадратичного участков зависимости корректирующей компоненты от угла θ.
задает точку сопряжения плоского линейного и квадратичного участков зависимости корректирующей компоненты от угла θ.
Результат применения мультипликативной коррекции на основе компоненты g(θ) показан на фиг. 10, а в виде скорректированной ПХ  (сплошная линия), а зависимость самой этой компоненты от угла
(сплошная линия), а зависимость самой этой компоненты от угла  - на фиг. 10, б. Изображенные на графиках фиг. 10 зависимости от угловой координаты θX(Y) построены при равенстве нулю соответствующей ортогональной угловой координаты θY(X)=0.
- на фиг. 10, б. Изображенные на графиках фиг. 10 зависимости от угловой координаты θX(Y) построены при равенстве нулю соответствующей ортогональной угловой координаты θY(X)=0.
Подставляя (11) в (13), получим процедуру расширения конической области пеленгации ИРИ, реализуемую в заявляемом пеленгаторе. Эта процедура состоит в формировании скорректированной оценки  угла θX(Y) в виде:
угла θX(Y) в виде:

где  .
.
Важно отметить, технический результат изобретения достигается только при совместном использовании в заявляемом пеленгаторе процедуры (14) и описанного выше антенного луча «веерного» типа. При этом, данным антенным лучом обеспечивается охват широкой конической области пеленгации ИРИ, а процедурой (14) - расширение области однозначности оценки каждой из угловых координат θX и θY за счет дополнительной информации об угле θ, которая содержится в частоте  принимаемого сигнала ИРИ.
принимаемого сигнала ИРИ.
Дополнительно отметим, что проведенное обоснование математических моделей для новых блоков и связей, вводимых в заявляемый пеленгатор, относится только к исходно принятому антенному лучу «веерного» типа и описывает необходимые условия достижения технического результата изобретения, при этом его количественное выражение представлено в приведенной выше таблице.
На фиг. 1 приведена функциональная схема прототипа, а на фиг. 2 приведена функциональная схема предлагаемого пеленгатора, где:
1 - антенна (А),
2 - генератор опорных сигналов (ГОС),
3 - приемник радиоизлучения (ПРИ),
4.1 и 4.2 - первый и второй формирователи сигналов отклонения (ФСО) соответственно,
5 - блок оценки частоты (БОЧ),
6 - формирователь корректирующей компоненты (ФКК),
7.1 и 7.2 - первый и второй блоки масштабирования (БМ) соответственно.
На фиг. 3 показано пространственное положение пеленгуемого ИРИ в измерительной системе координат XYZ и связанной с ней сферической системе координат.
На фиг. 4 представлено трехмерное изображение тела сканирующего антенного луча «карандашного» типа, применяемого в пеленгаторе-прототипе, в системе координат XYZ и в связанной с данным лучом системе координат xyz.
На фиг. 5 показано сечение ДН антенного луча «карандашного» типа в плоскости x0z, проходящей через ось конической поверхности сканирования и направление на ИРИ.
На фиг. 6 представлено трехмерное изображение тела сканирующего антенного луча «веерного» типа, применяемого в заявляемом пеленгаторе, в системе координат XYZ и в связанной с данным лучом системе координат xyz.
На фиг. 7 показаны сечения ДН антенного луча «веерного» типа:
а) в плоскости x0z, проходящей через ось конической поверхности сканирования и направление на ИРИ;
б) в плоскости, которая ортогональна плоскости x0z и имеет смещение Δϑy/2 по оси ϑx.
На фиг. 8 показаны временные диаграммы принимаемого сигнала ИРИ на выходе ПРИ 3 при трех различных значениях угла θ:
а) θ<Δϑy/2,
б) θ=Δϑy/2,
в) θ>Δϑy/2.
На фиг. 9 показано сечение ДН антенного луча «веерного» типа в плоскости угловых координатах ϑx и ϑy.
На фиг. 10 показаны зависимости для заявляемого пеленгатора:
а) скорректированной  и нескорректированной εX(Y)(θX(Y)) оценок угловой координаты θX(Y),
и нескорректированной εX(Y)(θX(Y)) оценок угловой координаты θX(Y),
б) корректирующей компоненты  .
.
На фиг. 11 приведена структурная схема ПРИ 3, где:
8 - смеситель (СМ),
9 - гетеродин (Г),
10 - усилитель промежуточной частоты (УПЧ),
11 - блок автоматической регулировки усиления (АРУ),
12 - детектор огибающей (ДО).
На фиг. 12 приведена структурная схема БОЧ 5, где:
13 - вычислитель производной (ВП),
14.1 и 14.2 - первый и второй квадраторы (К),
15.1 и 15.2 - первый и второй стробируемые интеграторы (СИ),
16 - делитель (Д).
На фиг. 13 приведена структурная схема ФКК 6, где:
17 - квадратор (К),
18 - умножитель (У),
19 - сумматор (С),
20 - вычислитель квадратного корня (ВКК).
На фиг. 14 показаны зависимости амплитудных коэффициентов спектрального разложения принимаемого сигнала ИРИ:
а) для прототипа,
б) для заявляемого пеленгатора,
а также
в) правые ветви ПХ прототипа и заявляемого пеленгатора.
Заявляемый пеленгатор источника радиоизлучения с широкоугольным коническим сканированием (фиг. 2) содержит последовательно соединенные ГОС 2, А 1 и ПРИ 3, последовательно соединенные БОЧ 5 и ФКК 6, а также две цепи последовательно соединенных ФСО 4 и БМ 7, при этом первые входы двух ФСО 4 и первый вход БОЧ 5 соединены с выходом ПРИ 3, вторые входы первого ФСО 4.1, второго ФСО 4.2 и БОЧ 5 соединены соответственно с вторым, третьим и четвертым выходами ГОС 2, выход ФКК 6 соединен с двумя вторыми входами первого БМ 7.1 и второго БМ 7.2, выходы которых являются выходами заявляемого пеленгатора по азимуту и углу места соответственно.
Работа заявляемого пеленгатора происходит следующим образом.
В качестве исходного условия работы заявляемого пеленгатора будем полагать воздействие сигнала ИРИ на антенну 1 в виде потока мощности, направление прихода которого совпадает с направлением на ИРИ. В антенне 1 осуществляется преобразование этого потока мощности в электрический сигнал, который с выхода антенны 1 поступает на вход ПРИ 3.
На фиг. 3 показана геометрическая модель пространственного положения ИРИ в декартовой системе координат XYZ, которая принимается в качестве измерительной системы координат. Направление на ИРИ характеризуется двумя углами θX и θY между осью 0Z и проекциями данного направления на плоскости X0Z (азимутальную) и Y0Z (угломестную) соответственно. Представленная геометрическая модель известна и аналогична пространственной координатной модели, используемой для управления беспилотными летательными объектами [10, с. 131, рис. 5.21].
Наряду с этим, при описании работы заявляемого пеленгатора будем использовать и сферические координаты ИРИ - углы θ и ϕ (фиг. 3) - соответственно широту и долготу направления на ИРИ, которые связаны с системой координат XYZ. Углы θX и θY выражаются через углы θ и ϕ: tgθX=tgθcosϕ и tgθY=tgθsinϕ (фиг. 3) или приближенно: θX≅cosϕ и θY≅θsinϕ, что допустимо с позиции практики. Введенные пары углов (θX,θY) и (θ,ϕ) далее будем считать угловыми отклонениями направления на ИРИ от РСН или угловыми координатами ИРИ, отсчитываемыми относительно РСН, которое совпадает с осью 0Z.
Работа заявляемого пеленгатора, так же как и пеленгатора-прототипа, синхронизирована сигналами, генерируемыми ГОС 2.
Синхронизирующий сигнал, управляющий сканированием антенного луча, передается с первого выхода ГОС 2 на вход антенны 1, который является входом позиционирования антенного луча по углу поворота в плоскости X0Y. Под воздействием данного сигнала антенный луч совершает непрерывное вращательное движение вокруг РСН (оси 0Z) по конической поверхности, как показано на фиг. 6.
Из этого рисунка видно, что, в отличие от пеленгатора-прототипа (фиг. 4), заявляемый пеленгатор имеет более широкую угловую область конического сканирования, что обусловлено применением антенного луча «веерного» типа, имеющего расширенную ДН в плоскости его смещения относительно РСН. При этом ось вращения антенного луча «веерного» типа проходит через область ската указанной расширенной ДН.
Фиг. 6 иллюстрирует непрерывное перемещение антенного луча «веерного» типа с круговой частотой Ω, при этом в момент времени t данный луч повернут в плоскости X0Y на угол Ωt. Аналогичным образом повернута и связанная с антенным лучом система координат xyz, ось 0z которой совпадает с РСН (также и с осью 0Z), а оси 0x и 0y образует угол Ωt с соответствующими осями 0Х и 0Y. Система координат xyz вводится для описания пространственных характеристик антенного луча «веерного» типа, а также - для наглядного отображения его отличия от антенного луча «карандашного» типа (фиг. 5).
Результат применения антенного луча «веерного» типа состоит в формировании конической поверхности с расширенным раствором Θ (по сравнению с пеленгатором-прототипом), в пределах которой возможна пеленгация ИРИ. Из фиг. 6 видно, что раствор Θ определяется как смещением антенного луча «веерного» типа относительно РСН, так и протяженностью плоского вершинного участка ДН данного луча. Для иллюстрации этого на фиг. 6 показано направление Н, соответствующее наиболее удаленной от РСН точке плоского вершинного участка ДН антенного луча «веерного» типа, а также противоположное направление ПН (относительно РСН). При перемещении направления Н формируется коническая поверхность, для которой направление Н выполняет роль образующей.
Ранее отмечалось, что использование широкоугольного конического сканирования является базовым условием достижения технического результата изобретения. В связи с этим, рассмотрим отдельно специфику ДН антенного луча «веерного» типа в связанной с ним системе координат xyz. Подобно приведенному выше описанию для случая пеленгатора-прототипа, в системе координат xyz будем оперировать углами ϑx и ϑy, которые образованы осью 0z и проекциями пространственного направления, характеризуемого данными углами, на плоскости x0z и y0z соответственно. При этом углы ϑx и ϑy в системе координат xyz аналогичны углам θХ и θY в системе координат XYZ (фиг. 3).
На фиг. 7, а показано сечение ДН антенного луча «веерного» типа в плоскости x0z. Принято, что увеличенную ширину Δϑx (по уровню половинной мощности) антенный луч «веерного» типа имеет только в плоскости x0z (фиг. 7, а), тогда как в ортогональной ей плоскости соответствующая ширина Δϑy равна базовой ширине Δϑ. Сечение ДН рассматриваемого антенного луча в указанной ортогональной плоскости иллюстрирует фиг. 7, б, при этом смещение этого сечения относительно оси 0z по координате ϑx выбрано равным Δϑy/2, поскольку на интервале от Δϑy/2 до Δϑx-Δϑy/2 данное сечение остается постоянным (в пределах плоского вершинного участка данной ДН). Базовая ширина Δϑ отражает потенциальные возможности антенны 1 с позиции пеленгации ИРИ и определяется размерами антенны 1, длиной волны λ, а также и амплитудно-фазовым распределением поля в раскрыве антенны 1 (что рассматривалось ранее).
Расширение антенного луча только в одной плоскости (x0z) может быть реализовано с помощью одного из известных методов синтеза ДН заданной формы [22, 23]. В качестве примера на фиг. 7,а показан вариант получения ДН с протяженным плоским вершинным участком за счет совмещения двух парциальных ДН (изображены пунктиром), которые имеют различные смещения по оси ϑx. При этом каждая из парциальных ДН относится к «карандашному» типу и характеризуется базовой шириной Δϑ=Δϑy. Приведенный на фиг. 7, а пример иллюстрирует то обстоятельство, что плоский вершинный участок ДН антенного луча «веерного» типа завершается в точке Δϑx-Δϑy/2, отмеченной направлением Н, следовательно, раствор Θ=2Δϑx-Δϑy. Отметим, что снижение КНД, сопутствующее расширению ДН, оговорено выше и является одним из факторов, которые учитываются при количественном обосновании технического результата изобретения.
Широкоугольное коническое сканирование, применяемое в заявляемом пеленгаторе, вызывает амплитудную модуляцию сигнала ИРИ в расширенном диапазоне углов θx и θy, который также включает в себя и плоский вершинный участок антенного луча «веерного» типа (до направления Н - см. фиг. 7, а).
Промодулированный данным антенным лучом сигнал ИРИ обрабатывается далее в ПРИ 3, реализация которого для заявляемого пеленгатора не имеет специфики, отличающей его от известных типовых схем, используемых в радиолокации [1-5, 24].
В качестве примера на фиг. 11 показана возможная структурная схема ПРИ 3, состоящая из последовательно соединенных смесителя (СМ) 8, усилителя промежуточной частоты (УПЧ) 10 и детектора огибающей (ДО) 12, а также гетеродина (Г) 9 и блока автоматической регулировки усиления (АРУ) 11. Сигнал ИРИ передается с входа ПРИ 3 на первый (сигнальный) вход СМ 8, а на второй (опорный) вход СМ 8 подается сигнал с выхода Г 9 для переноса сигнала ИРИ на промежуточную частоту. Выходной сигнал СМ 8 поступает на вход УПЧ 10, в котором этот сигнал усиливается и обрабатывается в спектральной области. С выхода УПЧ 10 обработанный сигнал ИРИ поступает на вход ДО 12, где осуществляется его амплитудное детектирование. При этом инерционность сглаживания продетектированного сигнала ИРИ в ДО 12 обеспечивает выделение непрерывной низкочастотной огибающей данного сигнала, амплитуда которой изменяется синхронно с перемещением антенного луча. Реализация ДО 12 является типовой для пеленгаторов с коническим сканированием и представлена в ряде литературных источников, например, в [8] или [2] в виде генератора расширенного сигнала. На второй (управляющий) вход УПЧ 10 подается сигнал управления усилением от блока АРУ 11, который формируется в АРУ 11 на основе выходного сигнала ДО 12, поступающего как на выход ПРИ 3, так и на вход блока АРУ 11. Блок АРУ 11, формирующий на своем выходе сигнал управления усилением (нормировки), также является типовым для пеленгаторов с коническим сканированием, а способы его реализации раскрыты в литературных источниках, например, в [1-4, 24].
Считая инерционность процессов детектирования и управления усилением (нормировки) в заявляемом пеленгаторе аналогичной пеленгатору-прототипу, будем полагать, что результатом нормировки, реализуемой с помощью АРУ 11, является замещение медленно меняющегося амплитудного сомножителя принимаемого сигнала ИРИ на постоянный коэффициент kА. К медленно меняющимся амплитудным флюктуациям принимаемого сигнала ИРИ или мультипликативным помехам, выступающим в качестве сомножителя данного сигнала, относятся те, время корреляции которых значительно превышает период сканирования Т. Поэтому, гармоники информационной амплитудной модуляции, вносимой перемещающимся антенным лучом «веерного» типа, не попадают в полосу частот нормировки, выполняемой с помощью АРУ 11 [2, 8]. Кроме того, будем полагать, что нормальные условия функционирования заявляемого пеленгатора обеспечиваются при таких отношениях сигнал/шум, которые позволяют считать пренебрежимо малыми комбинационные составляющие амплитудного детектирования вида «шум-шум» [12, 14].
Для описания принимаемого сигнала ИРИ на выходе ПРИ 3, являющегося функцией времени и угловых координат ИРИ, воспользуемся сферическими координатами ИРИ θ и ϕ, которые, как показано выше, связаны с углами θX и θY. При этом временной закон перемещения антенного луча «веерного» типа учтем в аргументе его ДН F(θ,Ωt-ϕ) и, основываясь на проведенных выше рассуждениях, опишем принимаемый сигнал ИРИ на выходе ПРИ 3: s(θ,ϕ,t)=kAF(θ,Ωt-ϕ), что аналогично случаю пеленгатора-прототипа.
Временные диаграммы сигнала s(θ,ϕ,t), изображенные на фиг. 8, иллюстрируют изменение формы данного сигнала в зависимости от широты ИРИ θ.
Фиг. 8, а отражает ситуацию, когда θ<Δϑy/2, и наглядно показывает наличие в сигнале s(θ,ϕ,t) только двух спектральных составляющих: а) постоянной составляющей с уровнем  , б) первой гармоники частоты сканирования, где sm - максимальное значение принимаемого сигнала, соответствующее плоскому вершинному участку ДН (фиг. 7, а). Увеличение угла θ в этой ситуации сопровождается ростом глубины амплитудной модуляции и амплитуды первой гармоники частоты сканирования, что аналогично пеленгатору-прототипу. Граничная ситуация максимума первой гармоники частоты сканирования в сигнале s(θ,ϕ,t) наступает при равенстве θ=Δϑy/2, что показано на фиг. 8, б.
, б) первой гармоники частоты сканирования, где sm - максимальное значение принимаемого сигнала, соответствующее плоскому вершинному участку ДН (фиг. 7, а). Увеличение угла θ в этой ситуации сопровождается ростом глубины амплитудной модуляции и амплитуды первой гармоники частоты сканирования, что аналогично пеленгатору-прототипу. Граничная ситуация максимума первой гармоники частоты сканирования в сигнале s(θ,ϕ,t) наступает при равенстве θ=Δϑy/2, что показано на фиг. 8, б.
В отличие от пеленгатора-прототипа, работа заявляемого пеленгатора продолжается и при дальнейшем увеличении угла θ>Δϑy/2, когда заметную роль в сигнале s(θ,ϕ,t) начинают играть высшие (начиная со второй) гармоники частоты сканирования, а сам сигнал s(θ,ϕ,t) приобретает импульсный характер, что видно из фиг. 8, в. В этой ситуации основным информационным параметром, позволяющим оценивать угловое отклонение ИРИ от РСН, становится время контакта с ИРИ τ, причем связь широты ИРИ θ с временем τ имеет обратную пропорциональность, описанную в (9).
Данная связь наглядно отражена на фиг. 9 и была рассмотрена ранее при описании сущности и способа достижения технического результата изобретения.
Дальнейшая обработка сигнала s(θ,ϕ,t), воспроизводимого на выходе ПРИ 3, осуществляется в трех параллельных цепях.
Первые две цепи, представленные двумя ФСО 4, аналогичны пеленгатору-прототипу и предназначены для формирования оценок εX и εY, которые соответствуют углам θX и θY в пределах узкой конической области пространства, ограниченной начальным участком ската ДН антенного луча «веерного» типа, когда  . В дальнейшем изложении оценки εX и εY считаются исходными или нескорректированными.
. В дальнейшем изложении оценки εX и εY считаются исходными или нескорректированными.
Третья цепь, состоящая из последовательно соединенных БОЧ 5 и ФКК 6, формирует на основе сигнала s(θ,ϕ,t) компоненту синхронной коррекции двух оценок εX и εY, которая обеспечивает расширение конической области пеленгации ИРИ за счет вершинного участка антенного луча «веерного» типа.
Принимаемый сигнал ИРИ с выхода ПРИ 3 поступает одновременно на первые входы первого ФСО 4.1 и второго ФСО 4.2. При этом на вторые входы ФСО 4.1 и ФСО 4.2 поступают азимутальный и угломестный опорные сигналы сканирования uX(t)=UcosΩt и uY(t)=UsinΩt соответственно со второго и третьего выходов ГОС 2, где U - амплитуда опорных сигналов сканирования.
В каждом ФСО 4 выполняется математическая операция перемножения двух сигналов, поступающих на его первый и второй входы, с последующей низкочастотной фильтрацией результата этого перемножения. Такая обработка является типовой при фазовом детектировании и реализуется на основе известной двухблочной структуры, приведенной, например в [14, с. 163, рис. 5.1].
Таким образом, сигналы угловых отклонений ИРИ от РСН на выходах ФСО 4.1 и ФСО 4.2 пропорциональны косинусам разностей фаз между сигналом s(θ,ϕ,t) и соответствующими опорными сигналами сканирования uX(t) и uY(t). За счет этого обеспечивается раздельное формирование двух независимых между собой оценок εX и εY на выходах соответственно ФСО 4.1 и ФСО 4.2:
где kS - коэффициент передачи каждого ФСО 4, kε=kSkAU - коэффициент пропорциональности для формируемых оценок,

- амплитудный коэффициент спектрального разложения принимаемого сигнала ИРИ при гармонической составляющей с частотой nΩ. [13].
С целью оценки угла θ, используемого далее для формирования корректирующей компоненты g(θ), принимаемый сигнал ИРИ с выхода ПРИ 3 поступает на первый вход БОЧ 5, на второй вход которого воздействует синхронизирующий сигнал с четвертого выхода ГОС 2.
Пример структурной схемы БОЧ 5 раскрыт на фиг. 12. Этот пример аналогичен структурной схеме измерителя среднеквадратической частоты спектральной плотности, приведенной в [21, с. 258, рис. 5.20]. Схема (фиг. 12) содержит две параллельные цепи, на входы которых совместно передается входной сигнал БОЧ 5. Первая цепь состоит из последовательно соединенных вычислителя производной (ВП) 13, первого квадратора (К) 14.1 и первого стробируемого интегратора (СИ) 15.1, а вторая цепь - из последовательно соединенных второго К 14.2 и второго СИ 15.2. На вторые входы обоих СИ 15 воздействует синхронизирующий (стробирующий) сигнал, передаваемый со второго входа БОЧ 5 на два данных входа. Этот стробирующий сигнал представляет собой последовательность коротких импульсов с периодом повторения Т и задает интервал времени, в течение которого накапливаются (интегрируются) входные сигналы каждого из двух СИ 15. Накопленные за время Т сигналы с выходов первого СИ 15.1 и второго СИ 15.2 поступают соответственно на первый и второй входы делителя (Д) 16, где вычисляется их отношение, передаваемое с выхода Д 16 на выход БОЧ 5.
Следует отметить, что вместо оценки непосредственно частоты  , расчет которой требует дополнительной операции извлечения квадратного корня, удобнее использовать квадрат такой оценки, что представлено, например, на схеме в [21, с. 258, рис. 5.20]. С учетом обоснованного выше способа формирования корректирующей компоненты по (13), требующего возведения частоты в четвертую степень, оценку данной частоты желательно формировать в виде промежуточной величины w, равной квадрату соответствующей круговой частоты
, расчет которой требует дополнительной операции извлечения квадратного корня, удобнее использовать квадрат такой оценки, что представлено, например, на схеме в [21, с. 258, рис. 5.20]. С учетом обоснованного выше способа формирования корректирующей компоненты по (13), требующего возведения частоты в четвертую степень, оценку данной частоты желательно формировать в виде промежуточной величины w, равной квадрату соответствующей круговой частоты  и вычисляемой согласно [7, с. 120] в виде:
и вычисляемой согласно [7, с. 120] в виде:

Применяя спектральное разложение сигнала s(θ,ϕ,t) с использованием амплитудных коэффициентов cn(θ), описанных в (16), и проводя последовательность аналитических действий с (17), представим величину w как функцию угла θ:

где модуль индекса n принимает значения от нуля до некоторого числа, которым ограничивается число гармоник спектрального разложения принимаемого сигнала ИРИ. Наличие данного ограничения исходит из возможности учета высших (начиная со второй) гармоник этого разложения при заданных частотных характеристиках ПРИ 3.
Сформированная оценка частоты эквивалентной гармонической огибающей поступает с выхода БОЧ 5 на вход ФКК 6 в виде величины w(θ), зависимой от угла θ. В ФКК 6 осуществляется нелинейное преобразование этой величины, приводящее к формированию корректирующей компоненты g(θ) в виде:

где  , коэффициент
, коэффициент  - описан в (14).
- описан в (14).
Реализация преобразования (19) не представляет технических сложностей и может быть выполнена на основе известных блоков, выполняющих соответствующие математические операции.
В качестве примера на фиг. 13 показана цепь последовательно соединенных блоков, которые составляют структуру ФКК 6. Эта цепь включает в себя: квадратор (К) 17, умножитель (У) 18, сумматор (С) 19 и вычислитель квадратного корня (ВКК) 20. При этом на вторые входы У 18 и С 19 подаются опорные величины - соответственно коэффициент К и единица.
Рассматривая прохождение входного сигнала ФКК 6 через описанную последовательность блоков (фиг. 13), нетрудно видеть непосредственное соответствие проводимой обработки формуле (19). Результатом этой обработки является корректирующая компонента g(θ), воспроизводимая на выходе ФКК 6.
Данная компонента с выхода ФКК 6 поступает в виде сигнала одновременно на вторые входы обоих МБ 7. При этом на первые входы первого БМ 7.1 и второго БМ 7.2 передаются сигналы нескорректированных оценок εX и εY (15) с выходов соответственно первого ФСО 4.1 и второго ФСО 4.2.
В каждом из БМ 7 выполняется операция перемножения двух его входных сигналов, а структурно каждый из БМ 7 состоит из одного элемента - перемножителя. В результате двух одновременно проводимых перемножений на выходах первого БМ 7.1 и второго БМ 7.2 формируются скорректированные на область больших значений угла θ оценки  и
и  , соответствующие углам θX и θY в расширенных угловых диапазонах азимута и угла места.
, соответствующие углам θX и θY в расширенных угловых диапазонах азимута и угла места.
Скорректированные оценки  и
и  представляют собой результат работы заявляемого пеленгатора, поскольку его азимутальный и угломестный выходы совмещены соответственно с выходами первого БМ 7.1 и второго БМ 7.2.
представляют собой результат работы заявляемого пеленгатора, поскольку его азимутальный и угломестный выходы совмещены соответственно с выходами первого БМ 7.1 и второго БМ 7.2.
Зависимость скорректированной оценки  от угла θX(Y) при равенстве нулю ортогональной угловой координаты (θY(X)=0) представляет собой ПХ заявляемого пеленгатора в плоскости XOZ (Y0Z), иллюстрация которой приведена на фиг. 10, а. Этот рисунок показывает, что данная ПХ образуется как результат умножения зависимости исходной нескорректированной оценки εX(Y) от угла θX(Y) (или исходной ПХ, изображенной на фиг. 10, а пунктиром, рабочий участок которой ограничен диапазоном от
от угла θX(Y) при равенстве нулю ортогональной угловой координаты (θY(X)=0) представляет собой ПХ заявляемого пеленгатора в плоскости XOZ (Y0Z), иллюстрация которой приведена на фиг. 10, а. Этот рисунок показывает, что данная ПХ образуется как результат умножения зависимости исходной нескорректированной оценки εX(Y) от угла θX(Y) (или исходной ПХ, изображенной на фиг. 10, а пунктиром, рабочий участок которой ограничен диапазоном от  до
до  ,) и корректирующей компоненты g(θ) - фиг. 10, б. Видно, что при масштабировании (коррекции) исходной оценки εX(Y) в областях
,) и корректирующей компоненты g(θ) - фиг. 10, б. Видно, что при масштабировании (коррекции) исходной оценки εX(Y) в областях  достигается значительное расширение рабочего участка ПХ заявляемого пеленгатора и покрытие этим рабочим участком углового диапазона от -Θ/2 до Θ/2.
достигается значительное расширение рабочего участка ПХ заявляемого пеленгатора и покрытие этим рабочим участком углового диапазона от -Θ/2 до Θ/2.
Аналитическую запись проводимой коррекции (14) можно расширить, раскрывая частоту  на основе (17) и (18). Тогда, оценка
на основе (17) и (18). Тогда, оценка  примет следующий вид:
примет следующий вид:

Последнее выражение раскрывает суть технического результата изобретения с позиции использования дополнительной информации, содержащейся в высших (начиная со второй) гармониках спектрального разложения принимаемого сигнала ИРИ. Правая часть (20) свидетельствует об использовании всей совокупности гармоник принимаемого сигнала ИРИ, тогда как в пеленгаторе-прототипе используется только одна (первая) гармоника из аналогичной совокупности.
С целью иллюстрации технического результата изобретения рассмотрим зависимость оценки  для широты ИРИ θ. Эта оценка аналогична оценке
для широты ИРИ θ. Эта оценка аналогична оценке , введенной при описании работы пеленгатора-прототипа (определена на области значений θ≥0), и соответствует правым ветвями ПХ заявляемого пеленгатора по плоскостям X0Z и Y0Z.
, введенной при описании работы пеленгатора-прототипа (определена на области значений θ≥0), и соответствует правым ветвями ПХ заявляемого пеленгатора по плоскостям X0Z и Y0Z.
На фиг. 14 показано различие пеленгатора-прототипа и заявляемого пеленгатора по способу использования гармоник спектрального разложения принимаемого сигнала ИРИ и учету их зависимостей от угла θ. Кривые этих зависимостей от угла θ для коэффициентов  пеленгатора-прототипа и коэффициентов сn(θ) заявляемого пеленгатора показаны соответственно на фиг. 14 а и б. Нетрудно видеть, что в случае заявляемого пеленгатора кривые сn(θ) распространены на более широкий диапазон углов θ и имеют больший удельный вес при n≥2 по сравнению с аналогичными кривыми
пеленгатора-прототипа и коэффициентов сn(θ) заявляемого пеленгатора показаны соответственно на фиг. 14 а и б. Нетрудно видеть, что в случае заявляемого пеленгатора кривые сn(θ) распространены на более широкий диапазон углов θ и имеют больший удельный вес при n≥2 по сравнению с аналогичными кривыми  пеленгатора-прототипа. Данное обстоятельство отражает тот факт, что антенный луч заявляемого пеленгатора имеет «веерный» тип и охватывает при сканировании более широкую коническую область пространства по сравнению с антенным лучом «карандашного» типа пеленгатора-прототипа.
пеленгатора-прототипа. Данное обстоятельство отражает тот факт, что антенный луч заявляемого пеленгатора имеет «веерный» тип и охватывает при сканировании более широкую коническую область пространства по сравнению с антенным лучом «карандашного» типа пеленгатора-прототипа.
Отметим, что коэффициенты  при n≥2 для пеленгатора-прототипа (фиг. 14, а, пунктирные кривые) не участвуют в формировании оценок угловых координат ИРИ. Следовательно, в результате обработки принимаемого сигнала ИРИ, проводимой в пеленгаторе-прототипе, зависимость оценки
при n≥2 для пеленгатора-прототипа (фиг. 14, а, пунктирные кривые) не участвуют в формировании оценок угловых координат ИРИ. Следовательно, в результате обработки принимаемого сигнала ИРИ, проводимой в пеленгаторе-прототипе, зависимость оценки  от угла θ (фиг. 14, в, пунктирная кривая) с точностью до постоянного коэффициента повторяет соответствующую зависимость только одного коэффициента
от угла θ (фиг. 14, в, пунктирная кривая) с точностью до постоянного коэффициента повторяет соответствующую зависимость только одного коэффициента  , т.е. амплитуды только первой гармоники принимаемого сигнала ИРИ.
, т.е. амплитуды только первой гармоники принимаемого сигнала ИРИ.
В отличие от этого, в заявляемом пеленгаторе обработка принимаемого сигнала ИРИ проводится по всем его гармоническим составляющим, причем высшие гармоники, начиная с n≥2, имеют больший вес ввиду «веерного» типа антенного луча (фиг. 14, б). Формирование оценок угловых координат ИРИ в заявляемом пеленгаторе осуществляется на основе всех коэффициентов сn(θ), объединение которых согласно (20) приводит к протяженной по углу θ зависимости оценки ε от данного угла (фиг. 14, в, сплошная кривая).
Сопоставление двух кривых ε(θ) и  , представленных на фиг. 14, в и характеризующих основной функциональный показатель соответственно заявляемого пеленгатора и пеленгатора-прототипа, наглядно иллюстрирует расширение рабочей области по углу θ (или раствора области пеленгации ИРИ), т.е. достигаемый технический результат изобретения.
, представленных на фиг. 14, в и характеризующих основной функциональный показатель соответственно заявляемого пеленгатора и пеленгатора-прототипа, наглядно иллюстрирует расширение рабочей области по углу θ (или раствора области пеленгации ИРИ), т.е. достигаемый технический результат изобретения.
Таким образом, технический результат от использования заявляемого пеленгатора состоит в расширении раствора конической рабочей области пеленгации ИРИ при фиксированном уровне погрешности оценки каждой из двух его угловых координат.
Реализация заявляемого пеленгатора не вызывает практических трудностей, так как вновь вводимые блоки представляют собой завершенные функциональные узлы, выполняемые на основе известных и широко распространенных радиотехнических элементов, выпускаемых отечественной промышленностью.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. М.: Радио и связь, 1984. 312 с.
2. Сколник М. Введение в технику радиолокационных систем. М.: Мир, 1965. 748 с.
3. Зуфрин А.М. Методы построения судовых автоматических угломерных систем. Л.: Судостроение, 1970. 408 с.
4. Бартон Д.К. Радиолокационные системы / Пер. с англ. под ред. К.Н. Трофимова. М.: Военное изд-во, 1967. 480 с.
5. Справочник по основам радиолокационной техники / Под ред. В.П. Дружинина. М.: Военное изд-во, 1967. 768 с.
6. Вопросы статистической теории радиолокации / в 2 т. Под ред. Г.П. Тартаковского. М.: Сов. радио. Т. 2, 1964. 1080 с.
7. Теоретические основы радиолокации / Под ред. В.Е. Дулевича. М.: Сов. радио, 1978. 608 с.
8. Радиотехнические системы / Под ред. Ю.М. Казаринова. М.: Высшая школа, 1990. 496 с.
9. Кузьмин С.З. Цифровая радиолокация. Введение в теорию. Киев: КВЩ, 2000. 428 с.
10. Гуткин Л.С. Принципы радиоуправления беспилотными объектами. М.: Сов. радио, 1959. 384 с.
11. Сазонов Д.М. Антенны и устройства СВЧ. М.: Высшая школа, 1988. 432 с.
12. Тихонов В.И. Статистическая радиотехника. М.: Радио и связь, 1982. 624 с.
13. Гоноровский И.С. Радиотехнические цепи и сигналы. М.: Изд-во «Дрофа», 2006. 720 с.
14. Евсиков Ю.А., Чапурский В.В. Преобразование случайных процессов в радиотехнических устройствах. М.: Высшая школа, 1977. 264 с.
15. Авиационные системы радиоуправления / в 3 т. Под ред. А.И. Канащенкова и В.И. Меркулова. М.: Радиотехника. Т. 2. Радиоэлектронные системы самонаведения, 2003. 392 с.
16. Шаров С.Н. Основы проектирования координаторов систем управления движущимися объектами. Л.: Гособразование СССР, 1990. 96 с.
17. Максимов М.В., Горгонов Г.И. Радиоэлектронные системы самонаведения. М.: Радио и связь, 1982. 304 с.
18. Бартон Д., Вард Г. Справочник по радиолокационным измерениям. М.: Сов. радио, 1976. 392 с.
19. Barton D.К. Radar Equations for Modern Radar. Norwood, MA: Artech House, 2013. 448 p.
20. Коростелев А.А. Пространственно-временная теория радиосистем. M.: Радио и связь, 1987. 320 с.
21. Куликов Е.И. Методы измерения случайных процессов. М.: Радио и связь, 1986. 272 с.
22. Зелкин Е.Г., Соколов В.Г. Методы синтеза антенн: Фазированные антенные решетки и антенны с непрерывным раскрывом. М.: Сов. радио, 1980. 296 с.
23. Инденбом М.В. Антенные решетки подвижных обзорных РЛС. Теория, расчет, конструкции. М.: Издательство «Радиотехника», 2015 г. 416 с.
24. Радиоприемные устройства / Под ред. А.П. Жуковского. М.: Высшая школа, 1989. 342 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ УГЛОВЫХ КООРДИНАТ РАДИОСИГНАЛА В АМПЛИТУДНЫХ МОНОИМПУЛЬСНЫХ ПЕЛЕНГАЦИОННЫХ СИСТЕМАХ | 2016 |
|
RU2625349C1 |
| МОНОИМПУЛЬСНЫЙ ФАЗОВЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2364882C2 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2361230C1 |
| СПОСОБ ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ ПРИ ОБЗОРНОЙ МОНОИМПУЛЬСНОЙ АМПЛИТУДНОЙ СУММАРНО-РАЗНОСТНОЙ ПЕЛЕНГАЦИИ С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ (ВАРИАНТЫ) И ОБЗОРНЫЙ МОНОИМПУЛЬСНЫЙ АМПЛИТУДНЫЙ СУММАРНО-РАЗНОСТНЫЙ ПЕЛЕНГАТОР С ИСПОЛЬЗОВАНИЕМ АНТЕННОЙ РЕШЕТКИ И ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ | 2015 |
|
RU2583849C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ РАДИОКОНТРАСТНОГО ОБЪЕКТА ПО НАПРАВЛЕНИЮ И УСТРОЙСТВО СОПРОВОЖДЕНИЯ РАДИОКОНТРАСТНОГО ОБЪЕКТА ПО НАПРАВЛЕНИЮ | 2003 |
|
RU2249232C2 |
| Фазовый пеленгатор | 2016 |
|
RU2618522C1 |
| Способ обзора пространства | 2017 |
|
RU2666763C1 |
| Способ одновременного измерения двух угловых координат цели в обзорной амплитудной моноимпульсной радиолокационной системе с антенной решеткой и цифровой обработкой сигнала | 2015 |
|
RU2615491C1 |
| Способ пеленгации источников радиоизлучения | 2022 |
|
RU2788079C1 |
| Способ обзора пространства | 2015 |
|
RU2610833C1 |
Изобретение относится к области радиолокации и предназначено для определения угловых координат источника радиоизлучения одновременно в двух ортогональных плоскостях пеленгации. Технический результат - расширение раствора конической области двухплоскостной пеленгации источника радиоизлучения при фиксированном уровне погрешности оценки каждой из двух его угловых координат. Широкоугольность конического сканирования достигается за счет использования антенного луча, который расширен только в одной плоскости, проходящей через ось его вращения, а пеленгатор содержит антенну, генератор опорных сигналов, приемник радиоизлучения, блок оценки частоты, формирователь корректирующей компоненты, два формирователя сигналов отклонения и два блока масштабирования, соединенные определенным образом. 1 табл., 14 ил.
Пеленгатор источника радиоизлучения с широкоугольным коническим сканированием, содержащий последовательно соединенные генератор опорных сигналов, антенну и приемник радиоизлучения, а также первый и второй формирователи сигналов отклонения, первые входы которых соединены с выходом приемника радиоизлучения, а их вторые входы соединены соответственно с вторым и третьим выходами генератора опорных сигналов, отличающийся тем, что антенный луч расширен в одной плоскости, проходящей через ось его вращения, а также введены последовательно соединенные блок оценки частоты и формирователь корректирующей компоненты, а также первый и второй блоки масштабирования, первые входы которых соединены соответственно с выходами первого и второго формирователей сигналов отклонения, первый и второй входы блока оценки частоты подключены соответственно к выходу приемника радиоизлучения и четвертому выходу генератора опорных сигналов, вторые входы первого и второго блоков масштабирования совместно подключены к выходу формирователя корректирующей компоненты, а их выходы являются выходами заявляемого пеленгатора.
| ГУТКИН Л.С | |||
| Принципы радиоуправления беспилотным объектами | |||
| Москва, Советское радио, 1959Б с.252, рис.9.16 | |||
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2007 |
|
RU2330304C1 |
| ФАЗОВЫЙ СПОСОБ ПЕЛЕНГАЦИИ | 1997 |
|
RU2134429C1 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2005 |
|
RU2288480C1 |
| US 6184830 B1, 06.02.2001 | |||
| JP 2005321270 A, 17.11.2005 | |||
| WO 2000019230 A1, 06.04.2000. | |||

