Изобретение относится к радиолокации, в частности к радиолокационным угломерным системам, предназначенным для сопровождения радиоконтрастных объектов (РКО) по направлению и оценки их пеленгов в горизонтальной и вертикальной плоскостях.
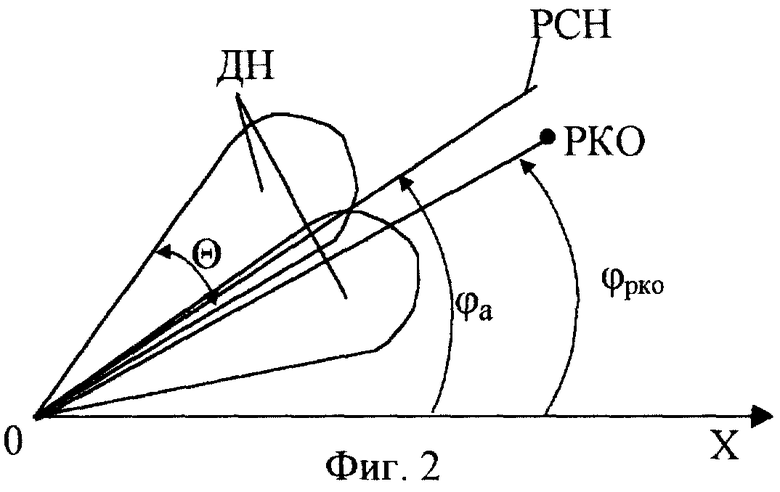
Известны способы сопровождения РКО по направлению и оценивания их пеленгов моноимпульсными радиолокационными системами (РЛС) [1, стр.5-39; 2, стр.5-14, 149-177, 183-196; 3, стр.261-298; 4, стр.216-224; 5]. В указанных способах и устройствах, их реализующих, одним из основных элементов является пеленгатор, состоящий из (см. фиг.1) антенны, квадратурного преобразователя и устройства обработки сигналов, который формирует сигналы, содержащие информацию о сторонах и величинах отклонения равносигнального направления (РСН) диаграммы направленности (ДН) антенны от направления на РКО (см. фиг.2) в двух взаимно перпендикулярных плоскостях. По этим сигналам формируют сигналы управления антенной при сопровождении РКО по направлению, а также оценивают значения пеленгов РКО.
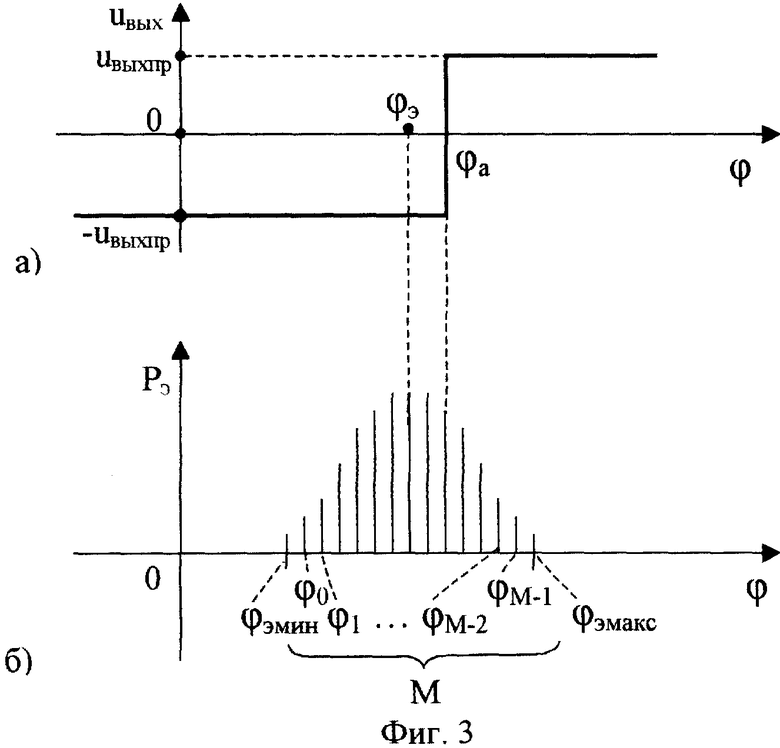
Наиболее часто используют способы сопровождения РКО по направлению и оценивания их пеленгов с применением моноимпульсных амплитудных суммарно-разностных систем обработки сигналов, описанных в литературе [1, стр.5-39; 3, стр.261-280]. К недостаткам указанных способов относят: наличие достаточно больших ошибок пеленгации, возникающих в результате взаимного влияния горизонтального и вертикального каналов пеленгатора; их неработоспособность, если амплитуда отраженного от РКО сигнала превысит динамический диапазон суммарного или разностных каналов пеленгатора [2, стр.209]. Перегрузка суммарного канала пеленгатора приводит к увеличению крутизны его пеленгационной характеристики (ПХ) и к уменьшению диапазона углов, в котором сохраняется ее линейность, причем при одновременной перегрузке суммарного и разностных каналов ПХ становится сигнатурной (см. фиг.3, а), называемой также релейной [6]. Выходные сигналы пеленгатора в этом случае несут информацию лишь о знаке угловых ошибок пеленгования РКО и не зависят от их величины. Это приводит к тому, что пространственная селекция РКО и сопровождение его по направлению на основе указанных выше способов становятся невозможными.
Из известных технических решений наиболее близким (прототипом) является моноимпульсный способ сопровождения РКО по направлению и определения его угловых координат, описанный в [5]. В нем: излучают сверхвысокочастотные (СВЧ) сигналы, принимают отраженные от РКО сигналы и формируют по ним три сигнала: суммарный и два разностных - ошибок пеленгации РКО в горизонтальной и вертикальной плоскостях. По этим сигналам формируют два нормированных разностных сигнала ошибок пеленгации РКО для упомянутых плоскостей. По этим сигналам и измеренным значениям углов положения антенны оценивают значения углов пеленга РКО и формируют сигналы для управления антенной. Значения оцененных углов пеленга РКО выдают потребителям информации.
Главным недостатком прототипа является низкая устойчивость и низкая точность сопровождения РКО по направлению в условиях, когда по каким-либо причинам (например, если амплитуда отраженного от РКО сигнала превысит динамический диапазон приемных каналов пеленгатора) ПХ пеленгатора приобретает сигнатурный характер.
Таким образом, задачей изобретения является обеспечение высокой устойчивости и точности сопровождения РКО по направлению в ситуациях, когда ПХ пеленгатора приобретает сигнатурный характер.
Поставленная задача достигается тем, что излучают СВЧ сигналы и принимают отраженные от РКО сигналы, по которым после их обработки формируют три сигнала: суммарный, нормированный разностный сигнал ошибки пеленгации в горизонтальной плоскости и нормированный разностный сигнал ошибки пеленгации в вертикальной плоскости. Измеряют значения углов поворота антенны в этих плоскостях. Определяют перегружены или нет приемные каналы пеленгатора.
Если ни один из его приемных каналов не перегружен, то
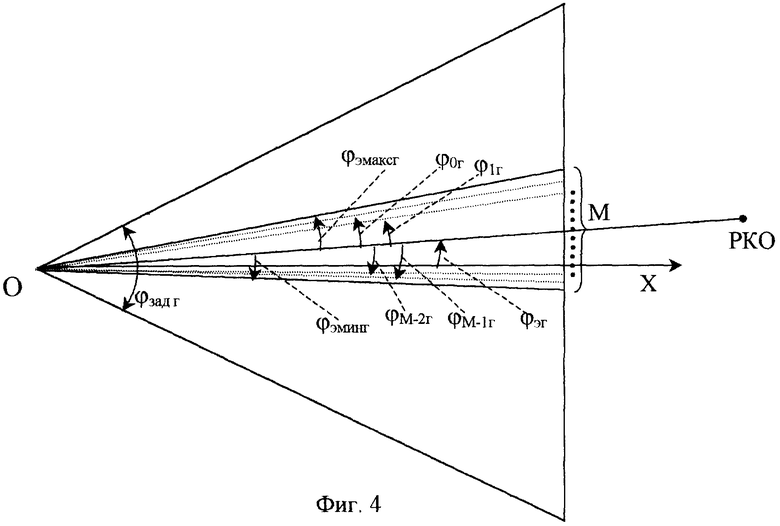
по нормированным разностным сигналам ошибок пеленгации и значениям углов поворота антенны для обеих плоскостей оценивают значения углов пеленга РКО и угловых скоростей его линии визирования и формируют экстраполированные значения углов пеленга РКО на следующий такт обработки сигналов; по экстраполированным значениям углов пеленга РКО вычисляют значения границ телесного угла {ϕ эмаксг, ϕ эминг, ϕ эмаксв, ϕ эминв} (см. фиг.4, где приведены границы телесного угла для одной плоскости) (здесь и далее подстрочные индексы “г” и “в” показывают, что сигнал принадлежит горизонтальной или вертикальной плоскости либо соответствующему каналу обработки), в пределах которого, по расчетам, будет находиться РКО на следующем такте обработки сигналов, разбивают его в каждой из упомянутых плоскостей на М равноотстоящих друг от друга угловых позиций пеленгов РКО ϕ 0г, ϕ 1г,... ,ϕ М-2г, ϕ М-1г и ϕ 0в, ϕ 1в,... ,ϕ М-2в, ϕ М-1в (см. фиг.4) и для каждой из них вычисляют значение экстраполированной плотности вероятности (ПВ) Рэmг и Рэmв (см. фиг.3, б) нахождения РКО на этой угловой позиции для соответствующей плоскости;
иначе
в каждой, из упомянутых выше, плоскости для каждого возможного пеленга РКО ϕ 0г, ϕ 1г,... ,ϕ М-2г, ϕ М-1г и ϕ 0в, ϕ 1в,... , ϕ М-2в, ϕ М-1в вычисляют значения апостериорных ПВ; по измеренным значениям углов поворота антенны и вычисленным значениям апостериорных ПВ оценивают значения углов пеленга РКО и угловых скоростей его линии визирования и формируют экстраполированные значения углов пеленга РКО на следующий такт обработки сигналов; по экстраполированным значениям углов пеленга РКО вычисляют значения границ телесного угла {ϕ эмаксг, ϕ эминг, ϕ эмаксв, ϕ эминв} в котором, по расчетам, будет находиться РКО на следующем такте обработки сигналов, разбивают его в каждой из упомянутых плоскостей на М равноотстоящих друг от друга угловых позиций пеленгов РКО ϕ 0г, ϕ 1г,... , ϕ М-2г, ϕ М-1г и ϕ 0в, ϕ 1в,... ,ϕ М-2в, ϕ М-1в и для каждой из них вычисляют значение экстраполированной ПВ нахождения РКО на этой угловой позиции для соответствующей плоскости.
По оцененным значениям угловых скоростей линии визирования РКО и экстраполированным значениям его углов пеленга формируют сигналы управления антенной.
Далее процесс сопровождения РКО повторяют.
Согласно предлагаемому способу вводят и запоминают исходные данные: α - константу, отражающую маневренные свойства РКО; М - константу, задающую количество дискретных угловых позиций в телесном угле {ϕ эмакст, ϕ эминг, ϕ эмаксв, ϕ эминв} (см. фиг.4), в котором осуществляют обнаружение РКО; τ - интервал (такт) обработки сигналов; kуг, Кув - коэффициенты пропорциональности преобразования угловых ошибок положения антенны в напряжения; Dϕ г, Dϕ в - дисперсии ошибок оценивания углов пеленга РКО; Dξ г, Dξ в - дисперсии угловых шумов пеленгов РКО, задаваемые типом РКО, который предполагается сопровождать; Θ г и Θ в - ширину ДН антенны; Uпор - пороговое значение нормированного сигнала ошибки пеленгации,задаваемое типом используемого пеленгатора.
Далее приступают к сопровождению РКО, для чего:
1) излучают СВЧ сигналы для радиолокационного обзора пространства в заданном телесном угле {ϕ задг, ϕ задв} (см. фиг.4). Принимают отраженные от РКО СВЧ сигналы и из них формируют три сигнала: суммарный Σ , и два разностных сигнала ошибок пеленгации jΔ г и jΔ в, определяющих отклонение РСН антенны от направления на РКО в горизонтальной и вертикальной плоскостях соответственно и сдвинутых по фазе на 90° относительно суммарного сигнала (здесь и далее символ j указывает на сдвиг фазы сигнала на 90° );
2) суммарный ∑ и разностные jΔ г и jΔ в сигналы одним из известных способов, например, описанным в [3, стр.268-272; 5], усиливают, фильтруют от шумов, преобразуют в цифровую форму и формируют по ним два нормированных сигнала ошибок пеленгации Δ г/∑ и Δ в/∑ в горизонтальной и вертикальной плоскостях, соответственно;
3) измеряют значения углов поворота антенны (ϕ aг, ϕ ав в соответствующих плоскостях;
4) модули амплитуд нормированных сигналов ошибок пеленгации |Δ г/∑ | и |Δ в/∑ | поочередно сравнивают с пороговым значением нормированного сигнала ошибки пеленгации Uпop, определяя этим: перегружен или нет приемный канал пеленгатора. Считают, что приемный канал пеленгатора перегружен, если |Δ г/∑ |>Uпop или |Δ в/∑ |>Uпор;
Если ни один из приемных каналов пеленгатора не перегружен, то выполняют действия, описанные в позициях 5-7 и 13, иначе - начиная с позиции 8;
5) по нормированным сигналам ошибок пеленгации Δ г/∑ , Δ в/∑ , и углам поворота антенны ϕ aг и ϕ ав одним из известных способов, например, описанным в [3, стр.289-298; 5; 7; 8, стр.35-32, 51-61], оценивают значения углов пеленга РКО  ,
,  , угловых скоростей линии визирования
, угловых скоростей линии визирования  ,
,  и экстраполированных на следующий такт обработки сигналов значений углов пеленга РКО ϕ эг, ϕ эв. Значения
и экстраполированных на следующий такт обработки сигналов значений углов пеленга РКО ϕ эг, ϕ эв. Значения  ,
,  и
и  ,
,  выдают потребителям информации, а значения ϕ эг, ϕ эв,
выдают потребителям информации, а значения ϕ эг, ϕ эв,  ,
,  запоминают;
запоминают;
6) вычисляют ϕ эминг, ϕ эмаксг, ϕ эминв, ϕ эмаксв - экстраполированные значения границ углов пеленга РКО по формулам:
Физически экстраполированные значения границ углов пеленга ϕ эминг, ϕ эмаксг, ϕ эминв, ϕ эмаксв (см. фиг.4) означают, что РКО, в силу своих маневренных свойств, определяемых коэффициентом α , и угловых шумов, определяемых дисперсиями Dξ г и Dξ в, на следующем такте обработки сигналов не может находиться вне пределов телесного угла {ϕ эминг, ϕ эмаксг, ϕ эминв, ϕ эмаксв}, заданного этими границами, в центре которого - экстраполированное значение пеленга РКО, определяемого углами ϕ эг, ϕ эв;
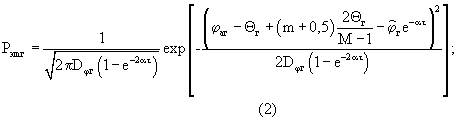
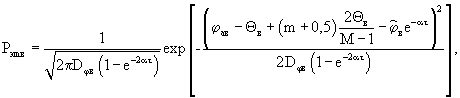
7) полученный телесный угол {ϕ эминг, ϕ эмаксг, ϕ эминв, ϕ эмаксв} в каждой из плоскостей разбивают на М равноотстоящих друг от друга угловых позиций ϕ mг, ϕ mв (см. фиг.4) (где  , а черта над символами здесь и ниже означает, что значение переменной m изменяется от 0 до М-1 с шагом 1), для каждой из которой вычисляют Рэmг и Рэmв - экстраполированное значение ПВ нахождения РКО в этом направлении по формулам:
, а черта над символами здесь и ниже означает, что значение переменной m изменяется от 0 до М-1 с шагом 1), для каждой из которой вычисляют Рэmг и Рэmв - экстраполированное значение ПВ нахождения РКО в этом направлении по формулам:
Значения угловых позиций ϕ mг, ϕ mв и экстраполированные значения ПВ Рэmг и Рэmв запоминают и переходят к выполнению действий, описанных в позиции 13;
8) поочередно сравнивают измеренное значение угла поворота антенны ϕ аг в горизонтальной плоскости со всеми запомненными угловыми позициями ϕ mг угла {ϕ эминг, ϕ эмаксг}, где  . По результатам сравнения находят угловую позицию пеленга РКО ϕ mг, равную углу ϕ аг, определяя этим Маг - номер угловой позиции пеленга РКО ϕ mг, соответствующего значению угла поворота антенны ϕ aг.
. По результатам сравнения находят угловую позицию пеленга РКО ϕ mг, равную углу ϕ аг, определяя этим Маг - номер угловой позиции пеленга РКО ϕ mг, соответствующего значению угла поворота антенны ϕ aг.
Аналогичные действия выполняют и для вертикальной плоскости, определяя номер угловой позиции пеленга РКО Мав, соответствующий значению угла поворота антенны ϕ ав;
9) используя найденные номера угловых позиций пеленга РКО Маг, Мав вычисляют значения апостериорных ПВ Раmг и Раmв для каждой угловой позиции пеленга РКО ϕ mг, ϕ mв в соответствующей плоскости по формулам:
10) вычисляют значения углов пеленга РКО ϕ г, ϕ в по формулам:

11) используя значения дисперсий ошибок оценивания углов пеленга РКО Dϕ г, Dϕ в и дисперсий угловых шумов пеленга РКО Dξ г, Dξ в, по вычисленным значениям углов пеленга РКО ϕ г, ϕ в одним из известных способов калмановской [3, стр.289-298; 8, стр.25-32] или адаптивной [7; 8, стр.51-61] фильтрации формируют оцененные значения углов пеленга РКО  ,
,  , угловых скоростей линии визирования
, угловых скоростей линии визирования  ,
,  , экстраполированные значения углов пеленга РКО ϕ эг, ϕ эв на следующий такт обработки сигналов, а также новые значения дисперсий ошибок оценивания углов пеленга РКО Dϕ г, Dϕ в.
, экстраполированные значения углов пеленга РКО ϕ эг, ϕ эв на следующий такт обработки сигналов, а также новые значения дисперсий ошибок оценивания углов пеленга РКО Dϕ г, Dϕ в.
Оцененные значения  ,
,  и
и  ,
,  выдают потребителям информации, а значения ϕ эг, ϕ эв,
выдают потребителям информации, а значения ϕ эг, ϕ эв,  ,
,  , Dϕ г, Dϕ в запоминают;
, Dϕ г, Dϕ в запоминают;
12) выполняют действия, описанные в позициях 6 и 7;
13) по экстраполированным значениям углов пеленга РКО ϕ эг, ϕ эв и оцененным значениям угловых скоростей линии визирования  ,
,  одним из известных способов, например, описанным в [3, стр.266, 284-285; 5; 6] формируют сигналы управления антенной uaг и uав.
одним из известных способов, например, описанным в [3, стр.266, 284-285; 5; 6] формируют сигналы управления антенной uaг и uав.
После этого описанный выше процесс сопровождения РКО повторяют.
Предлагаемый способ по сравнению с прототипом обладает более широкими возможностями по сопровождению РКО по направлению и оценке его пеленгов, в частности он позволяет устойчиво формировать оценки углов пеленга РКО и угловых скоростей линии визирования РКО даже в случае перегрузки приемных каналов пеленгатора.
Перейдем к рассмотрению устройства сопровождения РКО по направлению, связанного единым изобретательским замыслом с вышеописанным способом сопровождения РКО по направлению.
Из известных технических решений наиболее близким к заявляемому устройству по своей технической сущности является устройство сопровождения РКО по направлению (Monopolse tracking apparatus) [5].
Главным недостатком этого устройства является низкая устойчивость и низкая точность сопровождения РКО по направлению в условиях, когда ПХ пеленгатора приобретает сигнатурный характер.
Таким образом, задачей изобретения является обеспечение высокой устойчивости устройства сопровождения РКО по направлению и высокой точности определения угловых координат РКО в любых условиях применения, в том числе и в случаях, когда приемные каналы устройства перегружены.
Поставленная задача достигается тем, что в устройство, содержащее антенну, антенный переключатель, квадратурный преобразователь, устройство обработки сигналов (УОС), передатчик, синхронизатор, цифроаналоговый преобразователь (ЦАП), первый вычислитель, запоминающее устройство (ЗУ), дополнительно введены второй вычислитель, устройство обнаружения перегрузки (УОП) и два коммутатора.
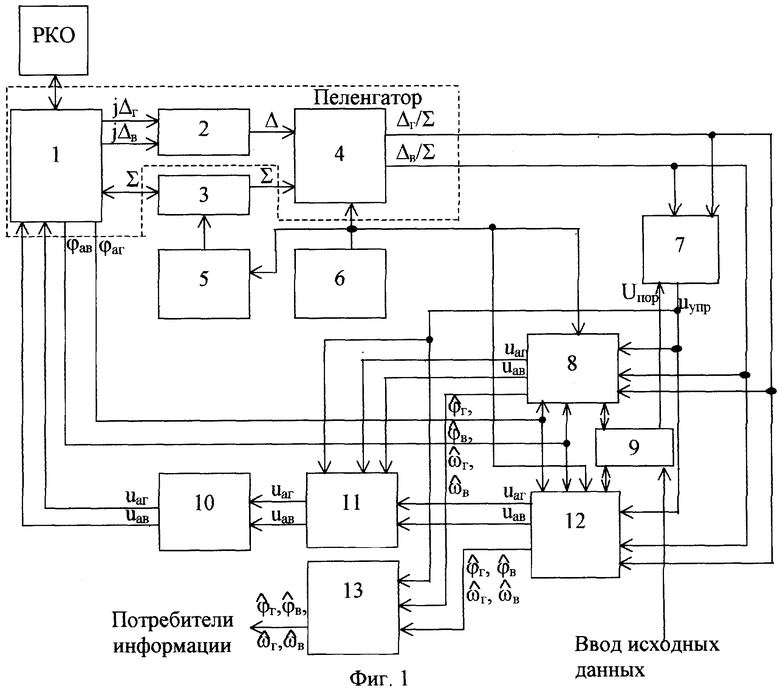
На фиг.1 представлена структурная схема устройства сопровождения РКО по направлению, которое содержит: 1 - антенну с входящими в ее состав моноимпульсным устройством суммарно-разностной обработки сигналов, приводом и датчиком углового положения антенны; 2 - квадратурный преобразователь; 3 - антенный переключатель; 4 - УОС; 5 - передатчик; 6 - синхронизатор; 7 - УОП; 8 - первый вычислитель; 9 - ЗУ; 10 - ЦАП; 11 - первый коммутатор; 12 - второй вычислитель; 13 - второй коммутатор. На данной фигуре символом РКО обозначен радиоконтрастный объект. Блоки 1, 2 и 4 и их связи по совместному функционированию образуют пеленгатор.
На фиг.2 изображены две парциальные диаграммы направленности (ДН) антенны; точками О и РКО обозначено положение заявляемого устройства и радиоконтрастного объекта; прямая O-РСН определяет равносигнальное направление (РСН) антенны; прямая O-Х определяет направление, относительно которого осуществляют измерения всех углов; ϕ а, ϕ рко - угловое положение антенны и РКО, соответственно. Для обеих плоскостей пеленгации формы ДН и ее пеленгационной характеристики одинаковы.
На фиг.3, а приведена ПХ пеленгатора в состоянии перегрузки, где uвых - значение выходного сигнала пеленгатора, а точки ϕ а и ϕ э определяют текущее значение угла поворота антенны и экстраполированное значение угла пеленга РКО соответственно; символом uвыхпр обозначено предельное значение выходного сигнала пеленгатора.
На фиг.3, б изображена зависимость экстраполированной ПВ Рэ нахождения РКО в каждой из М угловых позиций ϕ 0, ϕ 1 ...,ϕ м-2, ϕ м-1 возможного пеленга РКО от значения угла пеленга РКО ϕ . Точки ϕ эмин, ϕ эмакс определяют экстраполированные значения границ пеленга РКО.
На фиг.4 точками О и РКО показано положение заявляемого устройства и радиоконтрастного объекта соответственно; прямая О-Х определяет линию горизонта; угол ϕ зад г определяет заданную зону обзора; угол ϕ эг определяет экстраполированное положение РКО на следующий такт работы устройства; углами ϕ эмаксг и ϕ эминг заданы границы угла {ϕ эмаксг, ϕ эминг}, в котором по расчетам будет находиться РКО при следующем такте работы устройства; углы ϕ 0г, ϕ 1г,... ,ϕ М-2г, ϕ М-1г определяют М угловых позиций в пределах угла {ϕ эмаксг, ϕ эминг};
Устройство сопровождения РКО по направлению содержит антенну 1, первый (разностного сигнала горизонтального канала jΔ г) и второй (разностного сигнала вертикального канала jΔ в) выходы которой соединены соответственно с первым и вторым входами квадратурного преобразователя 2, выход которого соединен с первым входом УОС 4, третий (суммарного сигнала ∑ ) выход антенны 1, являющийся одновременно и ее первым входом, соединен с первым входом, являющимся одновременно и первым выходом, антенного переключателя 3, четвертый (сигнала угла поворота антенны в горизонтальной плоскости ϕ аг) и пятый (сигнала угла поворота антенны в вертикальной плоскости ϕ ав) выходы антенны 1 соединены соответственно с первыми и вторыми входами первого 8 и второго 12 вычислителей, второй вход УОС 4 соединен с вторым выходом антенного переключателя 3, второй вход которого соединен с выходом передатчика 5, выход синхронизатора 6 соединен с синхровходами передатчика 5, УОС 4,первого 8 и второго 12 вычислителей, первый (нормированного сигнала ошибок пеленгации горизонтального канала Δ г/∑ ) и второй (нормированного сигнала ошибок пеленгации вертикального канала Δ в/∑ ) выходы УОС 4 соединены соответственно: с первым и вторым входами УОП 7, четвертым и пятым входами первого вычислителя 8, четвертым и пятым входами второго вычислителя 12, выход УОП 7 соединен с управляющими входами первого 11, второго 13 коммутаторов и третьими входами первого 8 и второго 12 вычислителей, первый (сигнала управления антенной uaг в горизонтальной плоскости) и второй (сигнала управления антенной uав в вертикальной плоскости) выходы первого вычислителя 8 соединены соответственно с первым и вторым входами первого коммутатора 11, первый и второй выходы ЗУ 9, являющиеся одновременно его первым и вторым входами, соединены соответственно с шестыми входами, являющимися одновременно и их выходами, первого 8 и второго 12 вычислителей, третий выход ЗУ 9 соединен с третьим входом УОП 7, на третий вход ЗУ 9 подают исходные данные от внешнего источника, первый (сигнала управления антенной uaг в горизонтальной плоскости) и второй (сигнала управления антенной uав в вертикальной плоскости) выходы первого вычислителя 8 соединены соответственно с первым и вторым входами первого коммутатора 11, первый (сигнала управления антенной uaг в горизонтальной плоскости) и второй (сигнала управления антенной uав в вертикальной плоскости) выходы которого соединены соответственно с первым и вторым входами ЦАП 10, первый (сигнала управления антенной uaг в горизонтальной плоскости) и второй (сигнала управления антенной uав в вертикальной плоскости) выходы которого соединены соответственно с вторым и третьим входами антенны 1, третий (оцененных значений углов пеленга РКО  ,
,  и угловых скоростей линии визирования
и угловых скоростей линии визирования  ,
,  ) выход первого вычислителя 8 соединен с первым входом второго коммутатора 13, первый (сигнала управления антенной uaг в горизонтальной плоскости) и второй (сигнала управления антенной uав в вертикальной плоскости) выходы второго вычислителя 12 соединены соответственно с третьим и четвертым входами первого коммутатора 11, третий (оцененных значений углов пеленга РКО
) выход первого вычислителя 8 соединен с первым входом второго коммутатора 13, первый (сигнала управления антенной uaг в горизонтальной плоскости) и второй (сигнала управления антенной uав в вертикальной плоскости) выходы второго вычислителя 12 соединены соответственно с третьим и четвертым входами первого коммутатора 11, третий (оцененных значений углов пеленга РКО  ,
,  и угловых скоростей линии визирования,
и угловых скоростей линии визирования,  ,
,  ) выход второго вычислителя 12 соединен с вторым входом второго коммутатора 13, с выхода которого оцененные значений углов пеленга РКО
) выход второго вычислителя 12 соединен с вторым входом второго коммутатора 13, с выхода которого оцененные значений углов пеленга РКО  ,
,  и угловых скоростей линии визирования
и угловых скоростей линии визирования  ,
,  выдают потребителям.
выдают потребителям.
Антенна 1 с входящими в ее состав устройством суммарно-разностной обработки сигналов, приводом антенны и датчиками ее углового положения в горизонтальной и вертикальной плоскостях построена известным способом [5]. Она осуществляет:
- преобразование мощных сверхвысокочастотных (СВЧ) импульсов, подаваемых на ее первый вход, в радиосигналы и излучение их в пространство;
- прием отраженных от РКО радиосигналов, их усиление, пространственную селекцию и формирование трех сигналов: разностного сигнала горизонтального канала jΔ г (первый выход антенны), разностного сигнала вертикального канала jΔ в (второй выход) и суммарного сигнала ∑ (третий выход),
- обеспечение сопровождения РКО по углам пеленга посредством разворота зеркала антенны в направление на РКО приводом антенны по сигналам управления антенной uaг в горизонтальной и uав в вертикальной плоскостях, подаваемых на ее второй и третий входы соответственно;
- измерение значений углов поворота антенны ϕ aг (четвертый выход), ϕ ав (пятый выход) в соответствующих плоскостях датчиками углового положения, расположенными на приводе антенны.
Квадратурный преобразователь 2 построен известным образом [5]. Он выполняет следующие преобразования разностных сигналов ошибок пеленгации jΔ г, jΔ в:
- сдвигает фазу разностного сигнала ошибки пеленгации jΔ г в горизонтальной плоскости на 90° , формируя разностный сигнал ошибки пеленгации Δ г;
- суммирует разностный сигнал ошибки пеленгации Δ г в горизонтальной плоскости с разностным сигналом ошибки пеленгации jΔ в в вертикальной плоскости, формируя комбинированный сигнал ошибок пеленгации Δ =Δ г+jΔ в.
Антенный переключатель 3 также известен [5]. Он передает мощные СВЧ сигналы передатчика 5 на вход антенны 1, не пропуская их на вход УОС 4, и передает суммарный сигнал ∑ с выхода антенны 1 на вход УОС 4, не пропуская его на вход передатчика 5.
УОС 4 построен известным образом (см. прототип [5]). Он выполняет следующие действия над поданными в него сигналами:
- преобразует комбинированный сигнал ошибок пеленгации Δ и суммарный сигнал ∑ с СВЧ на промежуточную частоту (ПЧ), на которой путем их сложения и вычитания формирует два сигнала Σ +Δ и Σ -Δ (тем самым осуществляет временное уплотнение сигналов);
- полученные сигналы Σ +Δ и Σ -Δ в течение первого временного интервала, равного половине интервала обработки сигналов, усиливает соответственно в первом (А) и втором (В) усилительных каналах, формируя соответственно сигналы [ Σ +Δ ] А и [ Σ -Δ ] в, а затем, в течение второго временного интервала, равного по длительности первому, наоборот - во втором (В) и первом (А) усилительных каналах, формируя соответственно сигналы [Σ +Δ ]в и [ Σ +Δ ] А;
- полученные сигналы [ Σ +Δ ] А, [ Σ +Δ ] В, [ Σ -Δ ] В и [ Σ -Δ ] А гетеродинированием преобразует с ПЧ на видеочастоту и затем по ним формирует два видеосигнала [ Σ +Δ ] 1=[ Σ +Δ ] А+[ Σ +Δ ] В и [ Σ -Δ ] 2=[ Σ -Δ ] В+[ Σ -Δ ] А;
- полученные видеосигналы [ Σ +Δ ] 1 и [ Σ -Δ ] 2 преобразует в цифровую форму и подвергают их узкополосной фильтрации путем быстрого преобразования Фурье и затем разделяет их на суммарный сигнал ∑ и комбинированный разностный сигнал ошибок пеленгации Δ ;
- делением комбинированного разностного сигнала ошибок пеленгации Δ на суммарный сигнал ∑ формирует нормированный сигнал ошибок пеленгации Δ /∑ ;
- сравнением фазы полученного нормированного сигнала ошибок пеленгации Δ /∑ с фазой суммарного сигнала ∑ , а затем с фазой суммарного сигнала, сдвинутой на 90° , разделяет его на два нормированных сигнала ошибок пеленгации Δ г/∑ и Δ в/∑ в горизонтальной и вертикальной плоскостях соответственно.
Поскольку при описанных преобразованиях упомянутых сигналов с СВЧ на ПЧ, видеочастоту и переводе их в цифровую форму с их информационными составляющими (фазой, знаком и др.) преобразований не производится, то их обозначения не изменены.
Сигнал с синхронизатора 6 обеспечивает в УОС 4 синхронность описанного алгоритма.
Передатчик 5 известен [5]. Он формирует мощные СВЧ сигналы заданной длительности в момент прихода на его вход видеоимпульсов с синхронизатора 6.
Синхронизатор 6 построен известным способом [5]. Он вырабатывает видеоимпульсы, являющиеся синхроимпульсами для всех блоков заявляемого устройства.
УОП 7 представляет собой совокупность двух однотипных сравнивающих устройств, на один вход каждого из которых подают постоянное пороговое напряжение нормированного сигнала ошибки пеленгации Uпop, значение которого задают, исходя из типа используемого пеленгатора, а на вторые входы - модули амплитуд нормированных сигналов |Δ г/∑ | и |Δ в/∑ | ошибок пеленгации РКО. Выходы обоих сравнивающих устройств соединены между собой, поэтому при превышении амплитудой любого из нормированных сигналов |Δ г/∑ | и |Δ в/∑ | амплитуды порогового напряжения Uпop вырабатывается управляющий сигнал uупp, который поступает на выход УОП 7.
Каждый из вычислителей - первый 8 и второй 12 представляет собой типовую электронно-вычислительную машину общего назначения, входящую в настоящее время в состав любой радиолокационной станции. Отличие вычислителей заключается в том, что при отсутствии управляющего сигнала uупp первый вычислитель 8 включается (то есть выполняет возложенные на него функции), а второй вычислитель 12 - выключается (то есть не выполняет возложенные на него функции), и наоборот: при наличии управляющего сигнала uупp второй вычислитель 12 включается, а первый вычислитель 8 выключается. Сигналы с синхронизатора 6 обеспечивают синхронность выполняемых в них вычислений.
ЗУ 9 - стандартное оперативное запоминающее устройство, связанное обычным способом с первым 8 и вторым вычислителями 12.
ЦАП 10 - стандартный цифроаналоговый преобразователь.
Первый коммутатор 11 представляет собой типовое коммутирующее устройство, которое при отсутствии управляющего сигнала uупp коммутирует сигналы с его первого и второго входов на первый и второй выходы соответственно, а при наличии управляющего сигнала uупp коммутирует сигналы с его третьего и четвертого входов на первый и второй выходы соответственно.
Второй коммутатор 13 представляет собой типовое коммутирующее устройство, которое при отсутствии управляющего сигнала uупp коммутирует сигналы с его первого входа на выход, а при наличии управляющего сигнала - с его второго входа на выход.
Заявляемое устройство работает следующим образом.
В ЗУ 9 вводят значения следующих констант: α - константу, отражающую маневренные свойства РКО; М - константу, задающую количество дискретных угловых позиций в телесном угле, в котором осуществляют обнаружение РКО; τ - интервал обработки сигналов; kуг, kув - коэффициенты пропорциональности преобразования угловых ошибок положения антенны в напряжения в горизонтальной и вертикальной плоскостях соответственно; Dξ г, Dξ в - дисперсии ошибок оценивания углов пеленга РКО, задаваемые исходя из типа используемого пеленгатора; Dξ г, Dξ в - дисперсии угловых шумов пеленгов РКО, задаваемые исходя из типа РКО, который предполагается сопровождать; Θ г и Θ в - ширину ДН антенны в горизонтальной и вертикальной плоскости, соответственно; Uпop - пороговое значение нормированного сигнала ошибки пеленгации, задаваемое исходя из типа используемого пеленгатора.
Передатчик 5 по синхросигналам, поступающим из синхронизатора 6, формирует СВЧ сигналы, которые через антенный переключатель 3 подают в антенну 1, которая излучает их в направление РКО. На выходе антенны 1, после приема ею отраженных от РКО сигналов и их пространственной селекции, моноимпульсным устройством суммарно-разностной обработки формируют три сигнала: суммарный (и два разностных сигнала ошибок пеленгации jΔ г и jΔ в, определяющих отклонение РСН антенны от направления на РКО соответственно в горизонтальной и вертикальной плоскостях, причем разностные сигналы ошибок пеленгации jΔ г и jΔ в сдвинуты по фазе на 90° относительно фазы суммарного сигнала ∑ (здесь и далее символ j указывает на сдвиг фазы сигнала на 90° ). С первого и второго выходов антенны 1 разностные сигналы ошибок пеленгации jΔ г и jΔ в подают соответственно на первый и второй входы квадратурного преобразователя 2, в котором (см. прототип [5]) разностный сигнал ошибки пеленгации jΔ г горизонтального канала сдвигают по фазе на 90° , суммируют его с разностным сигналом ошибки пеленгации jΔ в в вертикальной плоскости, формируя комбинированный сигнал ошибок пеленгации Δ =Δ г+jΔ в, который с выхода квадратурного преобразователя 2 подают на первый вход УОС 4. Суммарный сигнал (с выхода антенны 1 через антенный переключатель 3 подают на второй вход УОС 4. В этом устройстве известным способом, описанным выше, поданные в него упомянутые сигналы усиливают, фильтруют от шумов, преобразуют в цифровую форму и формируют по ним для каждой из двух плоскостей соответственно нормированные сигналы ошибок пеленгации Δ г/∑ и Δ в/∑ , которые с первого и второго выходов УОС 4 подают соответственно на первый и второй входы УОП 7, четвертый и пятый входы первого вычислителя 8, четвертый и пятый входы второго вычислителя 12.
С помощью датчиков углового положения, расположенных в антенне 1, измеряют значения углов поворота антенны ϕ aг и ϕ ав в соответствующих плоскостях, которые через четвертый и пятый выходы антенны 1 подают соответственно на первый и второй входы первого вычислителя 8 и на первый и второй входы второго вычислителя 12.
В УОП 7 модули амплитуд сигналов |Δ г/∑ | и |Δ в/∑ | ошибок пеленгации сравнивают с пороговым значением нормированного сигнала ошибки пеленгации Uпop, подаваемого из ЗУ 9 на третий вход УОП 7. Если {|Δ г/∑ |≤ Uпop и |Δ в/∑ |≤ Uпop}, то из УОП 7 управляющий сигнал uупp не выдают. В этом случае в первом вычислителе 8 по разностным сигналам Δ г/∑ и Δ в/∑ и по значениям углов ϕ aг, ϕ ав, одним из известных способов, например, описанным в [3, стр.289-298], оценивают значения углов пеленга  ,
,  РКО и угловых скоростей линии визирования
РКО и угловых скоростей линии визирования  ,
,  и, с его третьего выхода через второй коммутатор 13, выдают их потребителям информации.
и, с его третьего выхода через второй коммутатор 13, выдают их потребителям информации.
Также в первом вычислителе 8 по формулам


определяют экстраполированные значения углов пеленга ϕ эг, ϕ эв РКО на следующий такт обработки сигналов, и по ним и измеренным значениям углов поворота антенны ϕ aг и ϕ ав в соответствии с формулами


находят сигналы управления антенной uaг и uав, которые соответственно с первого и второго выходов первого вычислителя 8 подают на первый и второй входы первого коммутатора 11 и далее с его первого и второго выходов - на первый и второй входы ЦАП 10, где их преобразуют в аналоговую форму и далее соответственно с его первого и второго выходов через второй и третий входы антенны 1 подают на привод управления антенной, который поворачивает антенну в направление РКО.
В вышеприведенных формулах: τ - интервал обработки сигналов; kуг, kув - коэффициенты пропорциональности преобразования угловых ошибок положения антенны в напряжения в горизонтальной и вертикальной плоскостях соответственно, которые в первый вычислитель 8 подают из ЗУ 9.
Оцененные значения угловых скоростей линии визирования  ,
,  и экстраполированные значения углов пеленга ϕ эг, ϕ эв запоминают в ЗУ 9.
и экстраполированные значения углов пеленга ϕ эг, ϕ эв запоминают в ЗУ 9.
Кроме этого в первом вычислителе 8 вычисляют фэминг, ϕ эмаксг, ϕ эминв, ϕ эмаксв - экстраполированные значения границ углов пеленга РКО по формулам


определяя этим телесный угол {ϕ эминг, ϕ эмаксг, ϕ эминв, ϕ эмаксв}, который в каждой из плоскостей разбивают на М равноотстоящих друг от друга угловых позиций пеленга РКО ϕ mг, ϕ mв, значения которых определяют по формулам:
 ,
,  ,
,
где  , для каждой из которой вычисляют Рэmг и Рэmв - экстраполированное значение ПВ нахождения РКО в этом направлении по формулам
, для каждой из которой вычисляют Рэmг и Рэmв - экстраполированное значение ПВ нахождения РКО в этом направлении по формулам
В вышеприведенных формулах: α и М - константы; Dϕ г, Dϕ в - дисперсии ошибок оценивания углов пеленга РКО; Dξ г, dξ в - дисперсии угловых шумов пеленгов РКО; Θ г и Θ в - ширина ДН антенны в горизонтальной и вертикальной плоскости соответственно, значение которых подают в первый вычислитель 8 из ЗУ 9.
Экстраполированные значения ПВ Рэmг, Рэmв и угловых позиций пеленгов РКО ϕ mг, ϕ mв запоминают в ЗУ 9.
В передатчике 5 по сигналам синхронизатора 6 снова формируют СВЧ сигнал, который с помощью антенны 1 излучают в направлении РКО и процесс сопровождения РКО повторяют.
Если {|Δ г/∑ |>Uпop или |Δ в/∑ |>Uпop}, то из УОП 7 на управляющие входы первого 11 и второго 13 коммутаторов и на третьи входы первого 8 и второго 12 вычислителей подают управляющий сигнал uупp. По этому сигналу во втором вычислителе 12 поочередно сравнивают измеренное значение угла поворота антенны ϕ aг в горизонтальной плоскости со всеми запомненными угловыми позициями пеленгов РКО ϕ mг угла {ϕ эминг, ϕ эмаксг}, где  . По результатам сравнения находят угловую позицию пеленгов РКО ϕ mг, равную углу поворота антенны ϕ aг, определяя этим Маг - номер угловой позиции пеленга РКО, соответствующего значению угла поворота антенны ϕ aг. Здесь также поочередно сравнивают измеренное значение угла поворота антенны ϕ ав в вертикальной плоскости со всеми запомненными угловыми позициями пеленгов РКО ϕ mв угла {ϕ эминв, ϕ эмаксв}. По результатам сравнения находят угловую позицию пеленга РКО (ϕ mв, равную углу поворота антенны ϕ ав, определяя этим Мав - номер угловой позиции пеленга РКО, соответствующего значению угла поворота антенны ϕ ав.
. По результатам сравнения находят угловую позицию пеленгов РКО ϕ mг, равную углу поворота антенны ϕ aг, определяя этим Маг - номер угловой позиции пеленга РКО, соответствующего значению угла поворота антенны ϕ aг. Здесь также поочередно сравнивают измеренное значение угла поворота антенны ϕ ав в вертикальной плоскости со всеми запомненными угловыми позициями пеленгов РКО ϕ mв угла {ϕ эминв, ϕ эмаксв}. По результатам сравнения находят угловую позицию пеленга РКО (ϕ mв, равную углу поворота антенны ϕ ав, определяя этим Мав - номер угловой позиции пеленга РКО, соответствующего значению угла поворота антенны ϕ ав.
После этого здесь же вычисляют значения апостериорных ПВ Раmг и Раmв в каждой плоскости для каждого из возможных m-х углов пеленга РКО по формулам
и по ним - значения углов пеленга ϕ г, ϕ в РКО для соответствующих плоскостей по формулам
Затем, используя значения дисперсий Dϕ г, Dϕ в и Dξ r, Dξ в, подаваемых из ЗУ 9, одним из известных способов калмановской фильтрации, например описанным в [3, стр.289-298], по вычисленным значениям углов пеленга ϕ г, ϕ в РКО, как по измеренным значениям этих углов, оценивают: значения углов пеленга  ,
,  РКО, угловых скоростей линии визирования
РКО, угловых скоростей линии визирования  ,
,  и новые значения дисперсий ошибок оценивания пеленгов Dϕ г, Dϕ в РКО, а также в соответствии с приведенными выше формулами находят экстраполированные значения углов пеленга ϕ эг, ϕ эв РКО на следующий такт обработки сигналов, и формируют сигналы управления антенной uaг и uав. Сигналы управления антенной uaг и uав соответственно с первого и второго выходов второго вычислителя 12, подают на третий и четвертый входы первого коммутатора 11, который коммутирует их на первый и второй входы ЦАП 10, с соответствующих выходов которого их аналоговые эквиваленты подают через второй и третий входы антенны 1 на ее привод, поворачивающий антенну в направлении на РКО.
и новые значения дисперсий ошибок оценивания пеленгов Dϕ г, Dϕ в РКО, а также в соответствии с приведенными выше формулами находят экстраполированные значения углов пеленга ϕ эг, ϕ эв РКО на следующий такт обработки сигналов, и формируют сигналы управления антенной uaг и uав. Сигналы управления антенной uaг и uав соответственно с первого и второго выходов второго вычислителя 12, подают на третий и четвертый входы первого коммутатора 11, который коммутирует их на первый и второй входы ЦАП 10, с соответствующих выходов которого их аналоговые эквиваленты подают через второй и третий входы антенны 1 на ее привод, поворачивающий антенну в направлении на РКО.
Оцененные значения углов пеленга  ,
,  РКО и угловых скоростей линии визирования
РКО и угловых скоростей линии визирования  ,
,  с третьего выхода второго вычислителя 12 подают на второй вход второго коммутатора 13 и далее потребителям информации.
с третьего выхода второго вычислителя 12 подают на второй вход второго коммутатора 13 и далее потребителям информации.
Экстраполированные значения углов пеленга ϕ эг, ϕ эв РКО и вычисленные значения дисперсий ошибок оценивания пеленгов Dϕ г, Dϕ в РКО запоминают в ЗУ 9.
Кроме этого во втором вычислителе 12 для следующего шага измерений по формулам (1) вычисляют ϕ эминг, ϕ эмаксг, ϕ эминв, ϕ эмаксв - экстраполированные значения границ углов пеленга РКО, формируя этим телесный угол {ϕ эминг, ϕ эмаксг, ϕ эминв, ϕ эмаксв}, который в каждой из плоскостей разбивают на М угловых позиций пеленгов РКО ϕ mг, ϕ mв, для каждой из которой по формулам (2) вычисляют экстраполированное значение ПВ Рэmг и Рэmв нахождения РКО в этом направлении. Значения Рэmг и Рэmв запоминают в ЗУ 9.
После этого описанный выше процесс сопровождения РКО повторяют. Заявленное устройство обладает по сравнению с прототипом более широкими возможностями при сопровождении РКО по направлению, в частности оно устойчиво функционирует даже при перегрузках приемных каналов пеленгатора, при которых прототип не может выполнять свои функции.
Использование изобретения позволит реализовать устойчивое сопровождение РКО по направлению и обеспечить формирование оценок пеленгов РКО с высокой точностью в любых условиях, даже при перегрузках в приемных каналах пеленгатора.
Реализация заявленного способа не предъявляет особых требований к антенне и ее приводу, приемным каналам пеленгатора, измерителям, а также к принципам построения вычислителей, их быстродействию и объему памяти ЗУ.
Литература
1. Дудник П.И. Моноимпульсные радиолокационные устройства, радиотехника (Итоги науки и техники). - М.: ВИНИТИ, т.3, 1972.
2. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. - М.: Радио и связь, 1984.
3. Меркулов В.И., Лепин В.Н. Авиационные системы радиоуправления. Ч.1, 2. - М.: Радио и связь, 1996.
4. Максимов М.В., Горгонов Г.И. Радиоэлектронные системы самонаведения. - М.: Радио и связь.
5. Патент США №5014064, кл. G 01 S 13/00 или 342-152, 07.05.1991.
6. Меркулов В.И., Викулов О.В., Минкин Ф.Ю. Оценивание случайных процессов при использовании сигнатурных наблюдений. - М.: ИПРЖРТ, Научно-технические серии. Радиолокация и радиотелеметрия, 1999, вып.1.
7. Патент РФ №2148836, кл. 7 G 01 S 13/66, 23.12.1998.
8. Меркулов В.И., Перов А.И., Саблин В.Н. и др. Радиолокационные измерители дальности и скорости. T.1 - М.: Радио и связь, 1999.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОИМПУЛЬСНОЕ РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО СОПРОВОЖДЕНИЯ ПО НАПРАВЛЕНИЮ | 2004 |
|
RU2273863C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА В РАДИОЛОКАЦИОННОЙ СИСТЕМЕ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ | 2003 |
|
RU2237909C1 |
| КОМПЛЕКСНЫЙ ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ, СКОРОСТИ И УГЛОВЫХ КООРДИНАТ ДЛЯ РАДИОТЕХНИЧЕСКИХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2251711C1 |
| СПОСОБ УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ПРИВОДОМ АНТЕННЫ, ОБЕСПЕЧИВАЮЩИЙ УСТОЙЧИВОЕ СОПРОВОЖДЕНИЕ ИНТЕНСИВНО МАНЕВРИРУЮЩИХ И ВЫСОКОСКОРОСТНЫХ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2571363C2 |
| СПОСОБ НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ОТДЕЛЬНУЮ ВОЗДУШНУЮ ЦЕЛЬ В СОСТАВЕ ПЛОТНОЙ ГРУППЫ ЦЕЛЕЙ | 2003 |
|
RU2253082C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ НИЗКОЛЕТЯЩИХ ЦЕЛЕЙ | 2017 |
|
RU2667484C1 |
| БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛЕЙ | 1988 |
|
RU2144202C1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ ПЕЛЕНГА ПОДВИЖНОГО ОБЪЕКТА | 2012 |
|
RU2507529C1 |
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2079150C1 |
| СПОСОБ АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ КОМПЕНСАЦИИ ПОМЕХ ПРИ МОНОИМПУЛЬСНОМ АМПЛИТУДНОМ СУММАРНО-РАЗНОСТНОМ ПЕЛЕНГОВАНИИ И НАЛИЧИИ ОШИБОК КАЛИБРОВКИ ПРИЕМНЫХ КАНАЛОВ | 2011 |
|
RU2456631C1 |
Предлагаемый способ заключается в том, что излучают сверхвысокочастотные сигналы и принимают отраженные от РКО сигналы, по которым после обработки формируют два нормированных сигнала Δг/∑ и Δв/∑ ошибок пеленгации в горизонтальной и вертикальной плоскостях, соответственно. Измеряют значения углов поворота антенны ϕаг, ϕав в упомянутых плоскостях. Определяют перегружены или нет приемные каналы пеленгатора. Если ни один из них не перегружен, то: 1) по сигналам Δг/∑, Δв/∑ ϕаг и ϕав оценивают значения углов пеленга РКО, угловых скоростей его линии визирования, формируют экстраполированные значения углов пеленга РКО на следующий такт обработки сигналов; 2) вычисляют значения границ телесного угла, в котором, по расчетам, будет находиться РКО на следующем такте, и разбивают его на М угловых позиций ϕmг, ϕmв (где  ), для каждой из которых вычисляют экстраполированное значение плотности вероятности (ПВ) нахождения РКО на этой угловой позиции; иначе: 3) относительно угловой позиции, в которой в данный момент находится антенна, вычисляют значения апостериорных ПВ для каждой угловой позиции ϕmг, ϕmв возможного пеленга РКО, по которым вычисляют значения оценок пеленгов РКО для соответствующих плоскостей; 4) выполняют действия, описанные в позиции 2. Формируют сигналы управления антенной, после чего описанные процесс сопровождения РКО повторяют. Устройство сопровождения РКО по направлению, реализующее заявленный способ, содержит антенну, антенный переключатель, квадратурный преобразователь, устройство обработки сигналов, передатчик, синхронизатор, запоминающее устройство, цифроаналоговый преобразователь, первый вычислитель, второй вычислитель, устройство обнаружения перегрузки и два коммутатора. Устройство обеспечивает для любой РЛС режим сопровождения РКО, когда приемные каналы ее пеленгатора не перегружены, и режим, в котором при перегрузке приемных каналов оценивание углов пеленга РКО осуществляется на основе вычисления апостериорных и экстраполированных на один такт обработки сигналов ПВ нахождения РКО в экстраполированном пеленге. 2 н.п. ф-лы, 4 ил.
), для каждой из которых вычисляют экстраполированное значение плотности вероятности (ПВ) нахождения РКО на этой угловой позиции; иначе: 3) относительно угловой позиции, в которой в данный момент находится антенна, вычисляют значения апостериорных ПВ для каждой угловой позиции ϕmг, ϕmв возможного пеленга РКО, по которым вычисляют значения оценок пеленгов РКО для соответствующих плоскостей; 4) выполняют действия, описанные в позиции 2. Формируют сигналы управления антенной, после чего описанные процесс сопровождения РКО повторяют. Устройство сопровождения РКО по направлению, реализующее заявленный способ, содержит антенну, антенный переключатель, квадратурный преобразователь, устройство обработки сигналов, передатчик, синхронизатор, запоминающее устройство, цифроаналоговый преобразователь, первый вычислитель, второй вычислитель, устройство обнаружения перегрузки и два коммутатора. Устройство обеспечивает для любой РЛС режим сопровождения РКО, когда приемные каналы ее пеленгатора не перегружены, и режим, в котором при перегрузке приемных каналов оценивание углов пеленга РКО осуществляется на основе вычисления апостериорных и экстраполированных на один такт обработки сигналов ПВ нахождения РКО в экстраполированном пеленге. 2 н.п. ф-лы, 4 ил.
1) излучают сверхвысокочастотные (СВЧ) сигналы, принимают отраженные от РКО СВЧ сигналы и по ним формируют три сигнала: суммарный ∑ и два разностных jΔг и jΔв, определяющих отклонение РСН антенны от направления на РКО в горизонтальной и вертикальной плоскостях соответственно и сдвинутых по фазе на 90° относительно суммарного сигнала (здесь и далее символ j указывает на сдвиг фазы сигнала на 90°),
2) по суммарному ∑ и разностным jΔг и jΔв сигналам формируют два нормированных сигнала ошибок пеленгации Δг/∑ и Δв/∑ в горизонтальной и вертикальной плоскостях соответственно,
3) измеряют значения углов поворота антенны ϕаг, ϕав в соответствующих плоскостях,
4) амплитуды нормированных сигналов ошибок пеленгации Δг/∑ и Δв/∑ поочередно сравнивают с пороговым значением нормированного сигнала ошибки пеленгации Uпор и,
если ни один из них не превышает его, то выполняют действия, описанные в позициях 5-8, иначе - начиная с позиции 9,
5) по нормированным сигналам ошибок пеленгации Δг/∑ и Δв/∑ и углам поворота антенны ϕaг и ϕав оценивают значения углов пеленга РКО 
 угловых скоростей линии визирования
угловых скоростей линии визирования 
 и экстраполированных на следующий такт обработки сигналов значений углов пеленга РКО ϕэг, ϕэв, оцененные значения углов пеленга РКО
и экстраполированных на следующий такт обработки сигналов значений углов пеленга РКО ϕэг, ϕэв, оцененные значения углов пеленга РКО  ,
,  и угловых скоростей линии визирования
и угловых скоростей линии визирования 
 выдают потребителям информации, а значения экстраполированных углов пеленга РКО ϕэг, ϕэв и угловых скоростей линии визирования
выдают потребителям информации, а значения экстраполированных углов пеленга РКО ϕэг, ϕэв и угловых скоростей линии визирования 
 запоминают,
запоминают,
6) вычисляют фэминг, фэмаксг, фэминв, фэмаксв - экстраполированные значения границ углов пеленга РКО по формулам:


формируя телесный угол в этих границах {ϕэминг, ϕэмаксг, ϕэминв, ϕэмаксв}, в центре которого - экстраполированное значение пеленга РКО, определяемого углами ϕэг, ϕэв,
7) полученный телесный угол {ϕэминг, ϕэмаксг, ϕэминв, ϕэмаксв} в каждой из плоскостей разбивают на М равноотстоящих друг от друга угловых позиций возможного пеленга РКО ϕmг, ϕmв (где  m=0, М-1 - номер угловой позиции, а черта над символами означает, что значение переменной m изменяется от 0 до М-1 с шагом 1), для каждой из которых вычисляют Рэmг и Рэmв - экстраполированное значение плотности вероятности (ПВ) нахождения РКО в этом направлении по формулам:
m=0, М-1 - номер угловой позиции, а черта над символами означает, что значение переменной m изменяется от 0 до М-1 с шагом 1), для каждой из которых вычисляют Рэmг и Рэmв - экстраполированное значение плотности вероятности (ПВ) нахождения РКО в этом направлении по формулам:
значения угловых позиций возможного пеленга РКО ϕmг, ϕmв и экстраполированные значения ПВ Рэmг и Рэmв запоминают,
8) переходят к выполнению действий, описанных в позиции 14,
9) поочередно сравнивают измеренное значение угла поворота антенны ϕaг в горизонтальной плоскости со всеми запомненными угловыми позициями возможного пеленга РКО ϕmг угла {ϕэминг, ϕэмаксг} и по результатам сравнения находят угловую позицию возможного пеленга РКО ϕmг, равную ϕaг, определяя этим Маг - номер угловой позиции возможного пеленга РКО, соответствующего значению угла поворота антенны ϕaг,
аналогичные действия выполняют и для вертикальной плоскости, определяя номер угловой позиции возможного пеленга РКО Мав, соответствующий значению угла поворота антенны ϕав,
10) используя найденные номера угловых позиций возможного пеленга РКО Маг, Мав, вычисляют значения апостериорных ПВ Раmг и Раmв для каждой угловой позиции возможного пеленга РКО ϕmг, ϕmв в соответствующей плоскости по формулам:
11) вычисляют значения углов пеленга РКО ϕг, ϕв по формулам:
12) используя значения дисперсий ошибок оценивания углов пеленга РКО Dϕг, Dϕв и дисперсий угловых шумов Dξг, Dξв, по вычисленным значениям углов пеленга РКО ϕг, ϕв формируют оцененные значения углов пеленга РКО 
 угловых скоростей линии визирования
угловых скоростей линии визирования 
 экстраполированные значения углов пеленга РКО ϕэг, ϕэв на следующий такт обработки сигналов, а также новые значения дисперсий ошибок оценивания пеленгов РКО Dϕг, Dϕв,
экстраполированные значения углов пеленга РКО ϕэг, ϕэв на следующий такт обработки сигналов, а также новые значения дисперсий ошибок оценивания пеленгов РКО Dϕг, Dϕв,
оцененные значения углов пеленга РКО 
 и угловых скоростей линии визирования
и угловых скоростей линии визирования 
 выдают потребителям информации, а экстраполированные значения углов пеленга РКО ϕэг, ϕэв, значения угловых скоростей линии визирования
выдают потребителям информации, а экстраполированные значения углов пеленга РКО ϕэг, ϕэв, значения угловых скоростей линии визирования  ,
,  и значения дисперсий ошибок оценивания пеленгов РКО Dϕг, Dϕв запоминают,
и значения дисперсий ошибок оценивания пеленгов РКО Dϕг, Dϕв запоминают,
13) выполняют действия, описанные в позициях 6 и 7,
14) по экстраполированным значениям углов пеленга РКО ϕэг, ϕэв и оцененным значениям угловых скоростей линии визирования  ,
,  формируют сигналы управления антенной uaг и uав,
формируют сигналы управления антенной uaг и uав,
после этого описанный выше процесс сопровождения РКО повторяют.
 ,
,  и угловых скоростей линии визирования
и угловых скоростей линии визирования  ,
,  ) выход первого вычислителя соединен с первым входом второго коммутатора, первый (сигнала управления антенной uaг в горизонтальной плоскости) и второй (сигнала управления антенной uав в вертикальной плоскости) выходы второго вычислителя соединены соответственно с третьим и четвертым входами первого коммутатора, третий (оцененных значений углов пеленга РКО
) выход первого вычислителя соединен с первым входом второго коммутатора, первый (сигнала управления антенной uaг в горизонтальной плоскости) и второй (сигнала управления антенной uав в вертикальной плоскости) выходы второго вычислителя соединены соответственно с третьим и четвертым входами первого коммутатора, третий (оцененных значений углов пеленга РКО  ,
,  и угловых скоростей линии визирования
и угловых скоростей линии визирования  ,
,  ) выход второго вычислителя соединен с вторым входом второго коммутатора, с выхода которого оцененные значения углов пеленга РКО
) выход второго вычислителя соединен с вторым входом второго коммутатора, с выхода которого оцененные значения углов пеленга РКО  ,
,  и угловых скоростей линии визирования
и угловых скоростей линии визирования  ,
,  выдают потребителям.
выдают потребителям.| US 5014064 А, 07.05.1991 | |||
| РАДИОТЕХНИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ, ИЗМЕРЕНИЯ СКОРОСТИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2126979C1 |
| МОНОИМПУЛЬСНЫЙ ПЕЛЕНГАТОР ДЛЯ ОБЗОРНОГО РАДИОЛОКАТОРА | 1989 |
|
RU2144199C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| US 6144333 A, 07.11.2000 | |||
| US 6133866 А, 17.10.2000 | |||
| ЦИФРОВОЙ ФАЗОМЕТР ДЛЯ ИЗМЕРЕНИЯ СРЕДНЕГО ЗНАЧЕНИЯ СДВИГА ФАЗ | 0 |
|
SU381038A1 |

