Изобретение относится к области точного приборостроения, к приводам микроманипуляторов и может быть использовано для малого регулируемого перемещения (микроперемещения, наноперемещения) рабочего органа различных объектов, например держателей, кантилевера атомно-силового микроскопа, при разработке микро- и наноинструментов, для создания малошумящих микромоторов.
Известны способ и устройство: в способе осуществления перемещений рабочего органа в устройствах плунжерного типа изменение давления в рабочих камерах производят при постоянном объеме рабочего тела путем добавления твердотельного носителя в рабочие камеры и перемещения его между ними. Устройство снабжено, по крайней мере, одним механизмом перемещения рабочего органа – твердотельного носителя, обеспечивающего позиционирование рабочего органа при его микроперемещении (RU 2320904).
Недостатками данных способа и устройства являются недостаточная точность микроперемещений рабочего органа, узкая область применения способа и устройства малых перемещений.
Известно устройство для точного позиционирования (малых перемещений рабочего органа – поршня), которое содержит два сообщающихся сосуда различного сечения, заполненных упругой средой (жидкостью) и закрытых подвижными поршнями, и привод, создающий усилие на одном из поршней. По крайней мере, один из сосудов снабжен одним средством изменения его подпоршневого объема, выполненным в виде перемещаемого внутрь его сильфона или в виде размещенной в его стенке или поршне мембраны малого диаметра. В данном устройстве малых перемещений рабочего органа реализуется способ перемещения рабочего органа – поршня – за счет изменения давления упругой среды при помощи мембраны (RU 2475354).
Недостатками данных способа и устройства являются недостаточная точность малых перемещений рабочего органа, недостаточная эффективность использования способа малых перемещений, узкая область применения способа и устройства малых перемещений рабочего органа.
Известно устройство, в котором движение рабочему органу передается под действием давления газа или жидкости на упругую (эластичную) мембрану из резины, полиэтилена, фторопласта или тонкой пластины металла. Усилие, создаваемое давлением упругой среды на мембрану, передается на рабочий орган – шток, который производит перемещения, в том числе малые перемещения (http://geyz.ru/news/2012-02-14-475. Мембранные приводы арматуры).
Для данных способа и устройства, в котором реализуется способ перемещений рабочего органа, характерными являются следующие недостатки: недостаточная точность перемещений рабочего органа, включая невозможность гарантировать точность малых перемещений рабочего органа, узкая область применения способа и устройства малых перемещений.
Наиболее близким по технической сущности к предлагаемому техническому решению является устройство мембранного типа, с помощью которого осуществляется способ малых перемещений рабочего органа. Мембранное устройство состоит из рабочей подмембранной полости, в которую подают воздух под давлением, и эластичной резиновой мембраны, соединенной с рабочим органом – со штоком. Возвратно-поступательное движение (перемещение) штока осуществляется путем подачи в подмембранную полость воздуха под давлением (http://stroy-technics.ru/article/ispolnitelnye-ustroistva. Исполнительные устройства. Пневматические исполнительные механизмы. Мембранные устройства).
Недостатками данных способа и устройства являются недостаточная точность микроперемещений рабочего органа, узкая область применения способа и устройства малых перемещений.
В способе малых перемещений рабочего органа устройства мембранного типа изменение давления газа в рабочей камере осуществляется за счет пропускания импульсов электрического тока в проводнике, размещенном в рабочей камере. Устройство снабжено подвижным элементом - мембраной - и укрепленным на ней рабочим органом - штоком. Повышение давления газа, обусловленное протеканием электрического тока в проводнике внутри рабочей камеры, приводит в движение мембрану и укрепленный на ней рабочий орган - шток.
Задачей предполагаемого изобретения является осуществить в том числе и малые (до 1 мкм) контролируемые перемещения рабочего органа, повысить точность перемещения рабочего органа, повысить эффективность использования способа малых перемещений и устройства для осуществления способа, расширить область применения.
Технически задача решается за счет того, что в устройстве мембранного типа, содержащем корпус, рабочую камеру, заполненную газом, и эластичную мембрану, соединенную с рабочим органом, выполненным в виде штока, в рабочей камере размещен проводник электрического тока с возможностью соединения с генератором импульсов электрического тока. Устройство позволяет реализовать способ малых перемещений рабочего органа устройства мембранного типа, включающий создание воздействия на рабочий орган в виде штока с использованием эластичной мембраны, соединенной со штоком, за счет изменения давления газа в рабочей камере, причем изменение давления в рабочей камере осуществляют путем пропускания импульсов электрического тока в проводнике, размещенном в рабочей камере, выполненной с отводом в виде трубки, выход которой закрыт эластичной мембраной. Техническим результатом данного технического решения является повышение точности перемещения рабочего органа, повышение эффективности использования способа малых перемещений, расширение области применения способа и устройства малых перемещений.
Сущность изобретения поясняется фиг. 1-5.
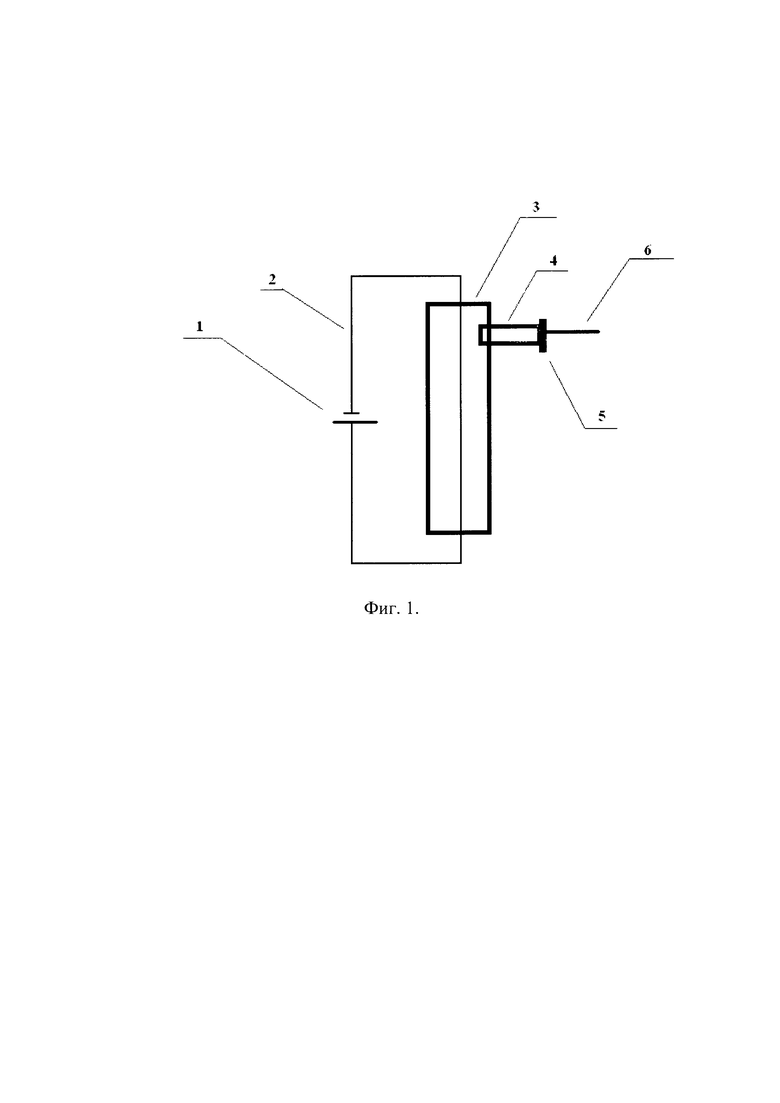
На фиг. 1 представлена схема устройства.
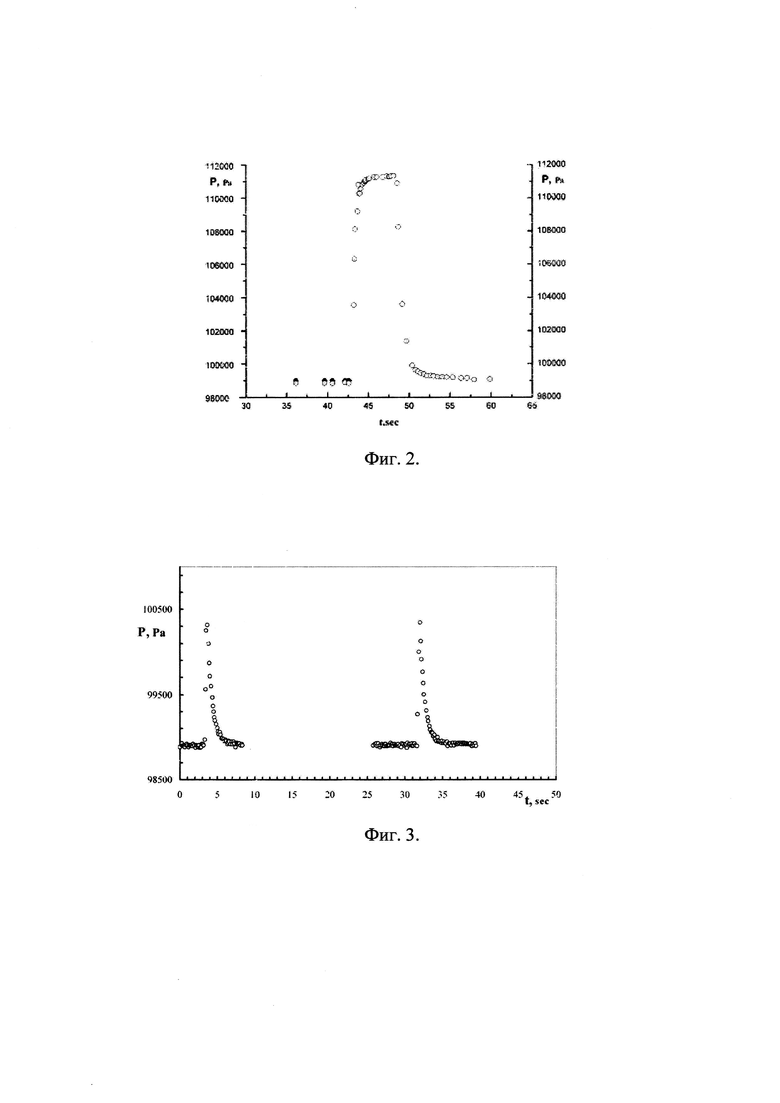
На фиг. 2 представлены типичные экспериментальные зависимости давления Р в рабочей камере от времени t для проводника из сплава никеля при воздействии импульса тока длительностью τ=5,5 сек с амплитудой I=0,6 А.
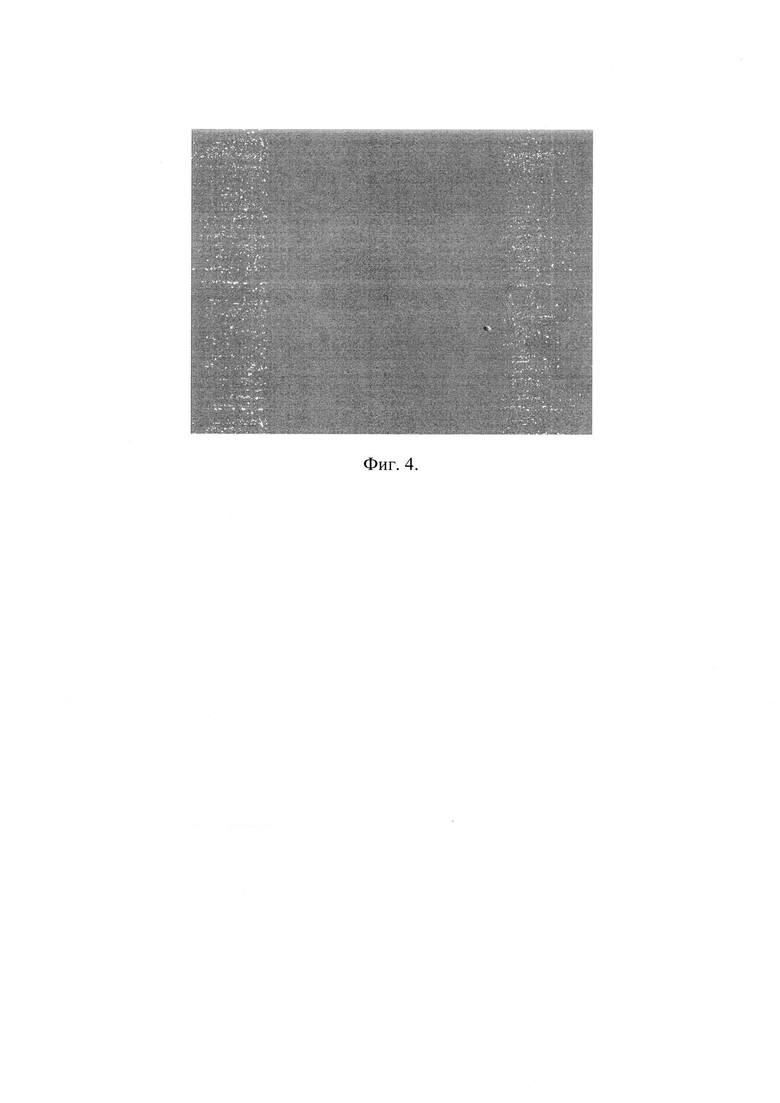
На фиг. 3 представлены экспериментальные зависимости давления от времени при протекании в проводе никелевого сплава двух последовательных токовых импульсов амплитудой I=0,36 А и длительностью τ=210 мсек.
На фиг. 4 представлена стеклянная пластинка со специально расположенным дефектом (миниатюрное пятно), относительно которого при наблюдении в микроскоп определялось положение рабочего органа - штока.
На фиг. 5 показаны три положения штока: а) до начала действия импульса электрического тока; b) в течение действия импульса длительностью τ=5,5 сек с амплитудой I=0,22 А; с) после окончания импульса.
Устройство включает (фиг. 1) источник электрического тока (импульсного тока) 1; проводник тока 2; корпус 3; отвод 4; мембрану 5; шток 6, соединенный с мембраной 5. Внутренний объем корпуса 3 и отвода 4 образует рабочую камеру устройства.
Устройство работает и способ реализуется следующим образом, суть которого ясна из нижеприведенного примера реализации способа.
Для реализации способа в рабочую камеру устройства (внутренняя полость запаянной стеклянной трубки диаметром 8 мм) помещался металлический проводник 2 с возможностью соединения с источником электрического тока 1. В качестве проводников от источника тока использовались провода меди. Внутри рабочей камеры использовался провод сплава никеля диаметром 100 мкм. В качестве источника электрического тока использовался генератор импульсов электрического тока с регулируемой амплитудой и длительностью импульса тока. В начале эксперимента в стеклянной трубке устанавливалось атмосферное давление воздуха. Пропускание импульса электрического тока по проводнику 2 приводило к повышению давления газа в рабочей камере и, как следствие, к прогибу мембраны 5 и малому перемещению штока 6.
При реализации способа устойчиво наблюдаются «скачки» давления в окрестности проводника с током, зависящие от амплитуды и длительности импульса тока. При достаточной длительности импульса тока импульс давления «повторяет» форму импульса тока.
Представленные на фиг. 3 экспериментальные зависимости давления от времени при протекании в проводе никелевого сплава двух коротких последовательных одинаковых импульсов тока амплитудой I=0,36 А и длительностью τ=210 мсек показывают повторяемость характера изменения давления. За время между окончанием первого импульса тока и стартом последующего происходит установление первоначального давления.
При реализации способа было зафиксировано однозначное соответствие между амплитудой (при заданной длительности) импульсов тока, протекающих в проводнике, и амплитудой изменения давления в окружающем проводник воздушном слое.
Изменения давления использовались для регулируемого малого перемещения миниатюрного штока 6, который крепился к мембране 5, закрывающей выход трубки. При протекании тока в проводнике в рабочей камере происходило изменения давления воздуха в трубке, приводящее в движение мембрану и укрепленный на ней шток. Малые перемещения штока 6 наблюдались в микроскопе. Для удобства наблюдения перемещения штока 6 рядом с ним устанавливалась стеклянная пластинка с дефектом (миниатюрное пятно) (фиг. 4), относительно которого измерялось положение штока.
Перемещение штока на фиг. 5 составляет более 200 мкм. При меньших значениях амплитуд импульсного тока перемещение штока соответственно меньше. При применении импульсов тока с малым значением амплитуды оказалось возможным добиваться перемещений меньше 1 мкм.
При сравнении положения штока относительно дефекта (пятна) стеклянной пластины видно, что по окончании действия импульса тока шток возвращается в начальное положение.
Приведенный пример реализации способа и проведенные исследования позволяют предложить широкое применение способа малых перемещений. Устройство и способ обладают рядом преимуществ перед существующими. Положительные отличия заключаются в следующем:
a) экономичность производства,
b) простота изготовления,
c) бесшумность работы,
d) малые размеры рабочего органа,
е) возможность удаления рабочего органа от механизма, обеспечивающего перемещения,
f) регулируемое усилие позволяет избежать поломки микро- и нанодеталей (например, кантилеверов при нанолитографии и сканировании поверхностей).
Очевидным является эффективное применение способа и устройства в следующих областях:
1) в нанолитографии;
2) для регулируемой подачи держателей при микро- и наноперемещениях, в том числе и перемещениях кантилевера атомно-силового микроскопа;
3) для создания микро- и наноинструментов, различных микро- и наномеханизмов;
4) для создания малошумящих микро- и наномоторов (в том числе поршневых);
5) для создания бесшумных воздушных компрессоров (например, для обогащения воздухом воды для обеспечения условий содержания рыбы и водных микроорганизмов).
Литература
1. Патент РФ №2320904, F15B 15/00. Способ осуществления рабочего органа в устройствах плунжерного типа и устройство для его осуществления / Болгов А.Н., Ивоботенко Б.А., Пашкин М.П. Опубликован 27.03.2008. Бюл. №9.
2. Патент РФ №2475354, B25J 7/00, F01B 25/02, H02N 2/02. Устройство для точного позиционирования / Аганин В.А., Ицексон Е.Л., Хайкин Р.З. и др. Опубликован 20.02.2013. Бюл. №5.
3. http://geyz.ru/news/2012-02-14-475. Мембранные приводы арматуры.
4. http://stroy-technics.ru/article/ispolnitelnye-ustroistva. Исполнительные устройства. Пневматические исполнительные механизмы. Мембранные устройства. Прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для осуществления возвратно-поступательного движения рабочего органа | 2018 |
|
RU2702449C1 |
| Способ дозирования жидкости и устройство для его осуществления | 2018 |
|
RU2687331C1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ГАЗА В ЖИДКОСТЬ | 2022 |
|
RU2796956C1 |
| Устройство для демонстрации броуновского движения | 1991 |
|
SU1818628A1 |
| Устройство для демонстрации реактивного движения | 1991 |
|
SU1802370A1 |
| Демонстрационный прибор по физике | 1990 |
|
SU1767514A1 |
| УСТРОЙСТВО ДЛЯ ЭЛЕКТРОХИМИЧЕСКОЙ ОБРАБОТКИ | 2007 |
|
RU2355523C1 |
| СПОСОБ ОБРАБОТКИ ТВЕРДОГО МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2093358C1 |
| Установка для смешения компонентов смесевого твердого ракетного топлива | 2022 |
|
RU2796958C1 |
| Многопозиционный регулятор уровня | 1980 |
|
SU930286A1 |

Изобретение относится к области точного приборостроения, к приводам микроманипуляторов и может быть использовано для малого регулируемого перемещения рабочего органа различных объектов. Технический результат – повышение точности перемещения. Способ малых перемещений рабочего органа устройства мембранного типа включает создание воздействия на рабочий орган в виде штока с использованием эластичной мембраны, соединенной со штоком, за счет изменения давления газа в рабочей камере. При этом изменение давления в рабочей камере осуществляют путем пропускания импульсов электрического тока в проводнике, размещенном в рабочей камере, выполненной с отводом в виде трубки, выход которой закрыт эластичной мембраной. 2 н.п. ф-лы, 5 ил.
1. Способ малых перемещений рабочего органа устройства мембранного типа, включающий создание воздействия на рабочий орган в виде штока с использованием эластичной мембраны, соединенной со штоком, за счет изменения давления газа в рабочей камере, отличающийся тем, что изменение давления в рабочей камере осуществляют путем пропускания импульсов электрического тока в проводнике, размещенном в рабочей камере, выполненной с отводом в виде трубки, выход которой закрыт эластичной мембраной.
2. Устройство для малых перемещений рабочего органа устройства мембранного типа, содержащее корпус, рабочую камеру, заполненную газом, и эластичную мембрану, соединенную с рабочим органом, выполненным в виде штока, отличающееся тем, что оно снабжено проводником электрического тока, расположенным в рабочей камере с возможностью соединения с генератором импульсов электрического тока.
| ПНЕВМОГИДРОПРИВОД | 2006 |
|
RU2324845C1 |
| Преобразователь энергии | 1986 |
|
SU1344962A1 |
| Двигатель линейного перемещения | 1987 |
|
SU1622659A1 |
| Препарат для фиксации перманентной завивки волос | 1961 |
|
SU146261A1 |
| 0 |
|
SU161750A1 |

