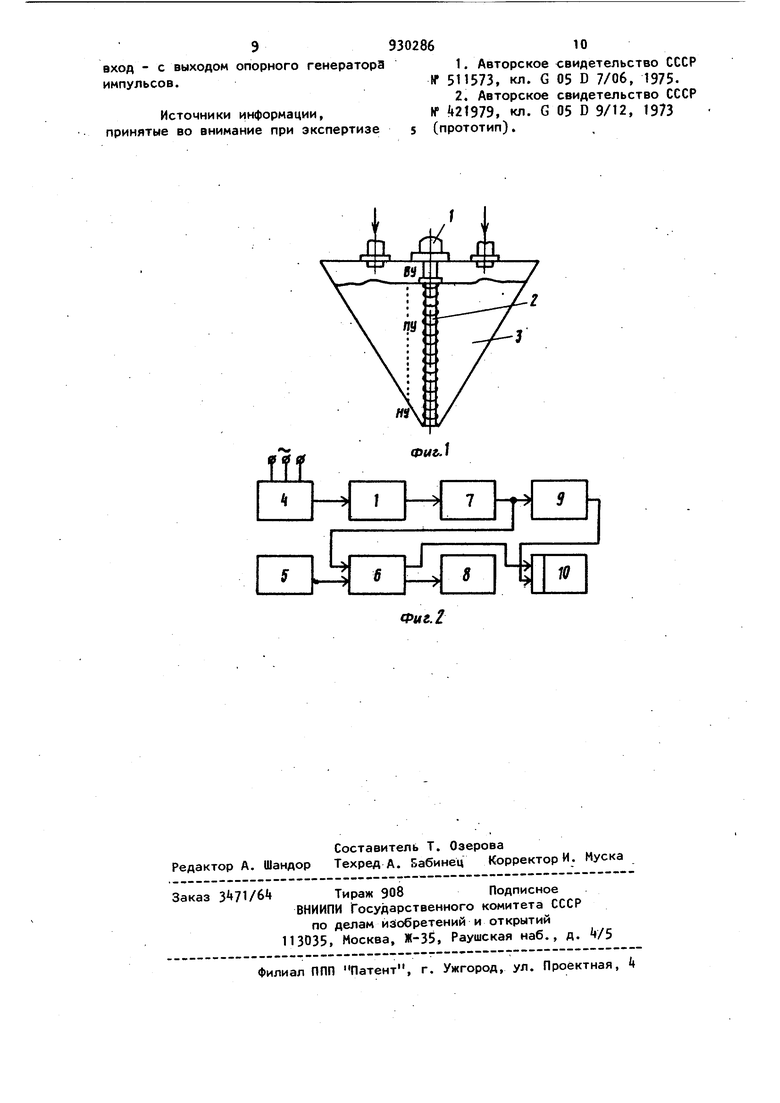
Изобретение относится к автомаТйке и предназначено для дозирования поступления сыпучих и жидких материалов в строительной индустрии. Известно устройство для регулирования расхода жидкости, содержащее поплавковый дозатор с входным и выходным патрубками, в котором расположены задатчик расхода и измеритель-, ный элемент, датчик уровня, секундомер, мерный сосуд, в котором размещены камера аварийного слива, датчик уровня, запорный клапан, соединенный через шток с секундомером, и дополнительный патрубок, связанный с поплавковым дозатором и через выходной патрубок с задатчиком расхода Q. Недостатками указанного устройства являются сложность конструкции и схемы измерительного устройства, невозможность регулирования расхода сыпучих материалов. Наиболее близким по технической сущности к настоящему изобретению является двухпозиционный регулятор уровня, содержащий двухфазовый исполнительный двигатель - редуктор,,на выходном валу которого установлены крыльчатки верхнего и нижнего уровней . Одна из статорных обмоток двигателя через конденсатор подключена к вторичной обмотке понижающего трансформатора, а другая, через выпрямительный мост и опорный диод, подключена к тиристору. Кроме того, в схеме имеется дополнительный трансформатор и коммутирующий элемент, управляющий работой исполнительного реле 2. . Недостатком указанного регулятора являются невозможность непрерывного измерения уровня различных сыпучих и жидких материалов по глубине бункера и их дозирования, невозможность настройки регулятора в процессе работы на различные материалы, обладающие различными физическими свойствами и повышенная истираемость крыльчаток в процессе работы, ограничиваю щая. диапазон их применения. Эти недостатки существенно сужают диапазон применения и использования регулятора и создают трудности настройки, регулировки и применения его. Цель изобретения повышение точности и быстродействия и расширение области применения устройства для различных сыпучих и жидких материалов в любом заданном объеме с автоматической перестройкой механизма при переходе с одного вида материала на другой. Поставленная цель достигается тем что устройство, содержащее датчик уровня, установленный через редуктор на валу двигателя и исполнительный механизм, содержит генератор, управля емый напряжением, опорный генератор импульсов и квадратурный фильтр, при чем датчик уровня выполнен в виде шн КЗ, обмотк-а двигателя соединена со входом генератора, управляемого напряжением, выход которого подключен к одному входу квадратурного фильтра выход которого связан со входом исполнительного механизма, а другой вход с выходом опорного генератора импульсов. применение шнека в составе первич ного преобразователя (датчика) приво дит к качественным отличиям и более высокому положительному эффекту и, по сравнению с устройством, содержащим крыльчатку, позволяет добиться непрерывного, в отличии от дискретно го изменения в двух характерных точках известного изменения величины выходного напряжения первичного преобразователя (датчика) в зависимости от изменения уровня среды резервуара что создает условия для программного регулирования изменения уровня среды во времени до заданного уровня дозй;рования, повышения точности дозирова ния, установки широкого диапазона уровня дозирования, непрерывного кон троля уровня дозирования и повышения производительности устройства. Более высокое быстродействие настоящего устройства по сравнению с известным, вызванное тем, что скачко образное изменение реактивного сопро тивления статорной обмотки двигателя прототипа не определяет мгновенное одновременное уменьшение напряжения на статорной обмотке до порогового значения напряжения, при котором исполнительный механизм отключается, что определяется временем переходного процесса уменьшения резонансной амплитуды до порогового значения выпрямленного напряжения. Более высокое быстродействие заявляемого объекта создает условия для повышения точности дозирования; повышения точности непрерывного контроля уровня среды, менее жесткого энергетического режима работы двигателя. На фиг. 1 изображена кинематическая схема регулятора; на фиг. 2 структурная схема. Устройство содержит приводной асинхронный двигатель 1 с редуктором (на чертеже объединены), шнек 2, бункер 3. Кроме того, на фиг. 1 обозначено:ВУ - верхний уровень засыпаемой массы. ПУ - промежуточный уровень засыпаемой массы. НУ - нижний уровень засыпаемой .массы. Фиг. 2 содержит стабилизатор k сетевого напряжения, опорный генератор 5 импульсов, квадратурный фильтр 6, генератор, управляемый напряжением 7, исполнительный механизм 8, выделитель нуля 9, счетчик 10. Регулятор работает следующим образом. Основными типами электродвигателей, используемых для привода производственных механизмов с регулируемой скоростью движения рабочего органа, являются двигатели постоянного тока и асинхронные с фазным и короткозамкнутым ротором, которые, несмотря на некоторое ограничение возможности регулирования скорости, надежнее, имеют меньшие габариты, вес и стоимость. Известно, что между скоростью вращения магнитного поля статора h.Тоб,/мин1, числом пар полюсов Р и частотой тока ГьГ существует соотношениеf php 60 При подключении асинхронного двигателя через стабилизатор сетевого напряжения k к сети переменного тока, возникающее вращающееся магнитное поле, пересекая обмотки ротора, наводит в них ЗДС, под действием которой в обмотках ротора проходят токи, зна чения которых определяются величиной этой ЭДС и сопротивлениями обмоток. Взаимодействие тока в проводниках ротора и вращающегося магнитного потока вызывает появление вращающегося момента Mgp, приложенного к ротору. При М вр М, где М - момент сопротивления механизма, ротор начинает вращаться. Вращающий момент, развиваемый двигателем при скорости вращения ротора п О, называют пусковым и обозначают М.
Для оценки величин относительной скорости вращения ротора двигателя и магнитного поля используют понятие скольжения S Асинхронный двигатель использует вырабатываемую им механическую энергию для привода шнека, причем к его входному валу необходимо приложить Мцрпри заданной скорости вращения, ибо механическая мощность Р определя .ется как Р Мп/9,55 Вт н.м. об/мин Различают механическую характерис тику электрического двигателя, представляющую собой зависимость (п) и механическую характеристику производственного механизма, предста ляющую собой зависимость М f(п). При М Мл двигатель разогнаться не может,- при Mf MC - двигатель разгоняется. С изменением скорости вращения п разница между и М изменяется, причем при М Mgp скорость системы двигатель - шнек устанавлива ется постоянной. Известен номинальный режим работы двигателя, при котором он развивает номинальный момент и вращается с номинальной скоростью Пц - режим это длительный. Кратковременно двигатель может работать при MC Мц, при этом вводят понятие перегрузочной способности асинхронного двигателя Л , причем л , где М - критический (максимально .развиваемый) момент двигателя.
302866
Для большинства асинхронных двигателей Л 1,,2, а у крановых до; ходит до 3.
Обычно асинхронный двигатель рабо. 5 .тает на участке механической характеристики от синхронной п,. скорости до критической п,.
Вращающий момент асинхронного двигателя Mgp пропорционален квадрату 10 напряжения, причем в пределах большей части рабочей характеристики эта зависимость линейна.
При разработке регулятора учитывают максимальный и минимальный объем дозируемого рабочего тела, рассчитывают нес)бходимый объем бункера, представляющего собой усеченный конус, V которого равен (R - r -bR-r), где h - высота усеченного конуса; R- радиус основания; г - радиус окружности сечения. Объем V дозируемого рабочего тела пропорционален высоте h наполнения бункера, значение которой, в свою очередь, пропорциональны М цр двигателя или М механизма или квадрату напряжения U, снимаемого с статорной обмотки двигателя. Далее строят график нагрузки электродвигателя Mgp (t) во времени. Определяют объем бункера, тип и мощность двигателя и его перегрузочную способность X М вр. max Л -п Вр. НОМ с учетом снижения сетевого напряжения. При Снижении напряжения сети до 0,92 и..; а (0,92) 0,85, т. е. при 71 2, я 0,85-1,7. По графику п. 4 ° Р Д - ° вр (Пах и рассчитывают Мцр ном ьр tnoix/ определяют эквивалентный вращающий момент Mgp 3(ie ° двигатель в паузах не отключается и действующее значение магнитного .потока считаем по- СТОЯННЫМ. - J. &р р врэиб ,где tp - время работы двигателя; tp - время покоя. Сравнивают получившееся значение М я ГЛОХ Вр. экв .тах Р max Mftpmax таль устойчив и выбран правильно. Напряжение U, снимаемое с ротора трехфазного асинхронного двигателя, при применении асинхронного двигателя с фазным ротором, либо снимаемое через трансформатор тока со статор ной обмотки трехфазного асихронного двигателя с короткозамкнутым ротором пропорциональное объему рабочего тела бункера, поступает на вход генератора управляемогр напряжением 7, выходной сигнал U(t) которого стабилизированный по амплитуде и пропорциональный . и (t) и - cos через выделитель нуля 9 приходит соответственно на счетный вход счетчика 10, выходной сигнал которого пропорционален мгновенному объему, зани маемому рабочим телом бункера 3, и на первый вход квадратурного фильтра 6, на второй вход которого поступает сигнал U2Ct) опорного перестраиваемо го генератора импульсов 5, пропорциональный) Ug -cos C02t причем значение опорной частоты пере .страиваемого генератора импульсов 5 устанавливается в зaвиcимoctи от тре буемой дозировки рабочего тела и от его физических.свойств. Оба вышепере численных сигнала U(t) U cosco t UgCt) Ugcos cogt поступают на вход квадратурного филь тра 6, выходной сигнал которого U;j выделения составляющей GO -ЬЭ равный Uj(t) (032-)t при фиксированной частоте СО2Опорного перестраиваемого генератора импульсов/ соответствует определенному уровню наполнения бункера, соответст вующему определенному напряжению на обмотке статора двигателя и опреде8енной частоте Ц) генератора, управлямого напряжением 7, вблизи частоты СО2 вызовет скачок амплитуды выходного напряжения в виде резонансной криой с узкой полосой пропускания, дотаточный для срабатывания исполниельного механизма 8, в качестве которого возможно использование исполнительного реле, магнитного пускателя, электромагнитной заслонки и т. д., прекращающего подачу засыпаемой массы в бункер, или открывающего дно ункера или и то и другое. Одновременно выходной сигнал квадратурного фильтра 6 поступает на вход установки нуля счетчика 10, сбрасывая его показания. Перестраивая частоту CO 2 опорного генератора импульсов 5, возможно устанавливать необходимый уровень заполнения бункера, осуществляя дозировку поступающего рабочего тела с учетом его физических свойств. Достоинствами настоящего изобретения являются повышение точности и быстродействия, а также простота регулирования уровня рабочего тела; возможность непрерывного дозирования рабочего тела и оперативной настройки регулятора в зависимости от физических свойств рабочего тела, а также большая долговечность работы шнека и электронной части регулятора, выполненной на серийных интегральных микросхемах по сравнению с крыльчатками и электронной схемой известного. Формула изобретения Многопозиционный регулятор уровня, содержащий датчик уровня, установленный через редуктор на валу двигателя, и исполнительный механизм, отличающийся тем, что, с целью повышения точности, быстродействия и расширения области применения устройства, оно содержит генератор управляемый напряжением, опорный генератор импульсов и квадратурный фильтр, причем датчик уровня выполнен в виде шнека, обмотка двигателя соединена с входом генератора, управляемого напряжением, выход которого подключен к одному входу квадратурного фильтра, выход которого связан с входом исполнительного механизма, а другой
вход - с выходом опорного генератора импульсов.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР (Г 511573, кл. G 05 D 7/06, 1975.
2.Авторское свидетельство СССР If Й21979, кл. G 05 D 9/12, 1973
(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления асинхронным электроприводом и устройство для его осуществления | 1984 |
|
SU1458962A1 |
| Устройство для торможения частотно-регулируемого асинхронного электродвигателя | 1982 |
|
SU1241391A1 |
| Электропривод | 1985 |
|
SU1309244A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 1999 |
|
RU2169426C1 |
| Автоматическая микропроцессорная система регулирования температуры энергетической установки транспортного средства | 2016 |
|
RU2645519C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ТЕМПЕРАТУРЫ ОХЛАЖДАЮЩЕЙ СРЕДЫ ТЕПЛОВОЙ МАШИНЫ | 2003 |
|
RU2264544C2 |
| РЕГУЛЯТОР ТЕМПЕРАТУРЫ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2214929C1 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ТЕПЛОВОЙ МАШИНЫ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ ВЕНТИЛЯТОРА | 2011 |
|
RU2501961C2 |
| АВТОМАТИЧЕСКИЙ КОМБИНИРОВАННЫЙ МИКРОПРОЦЕССОРНЫЙ РЕГУЛЯТОР ТЕМПЕРАТУРЫ ТЕПЛОВОЙ МАШИНЫ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ ВЕНТИЛЯТОРА | 2011 |
|
RU2503558C2 |
| Устройство для частотного управления электроприводом | 1982 |
|
SU1089749A1 |
m
Ф{/&Л
Фи&.2
