Область техники, к которой относится изобретение
Настоящее изобретение относится к области стабилизации судна, главным образом, от бортовой качки, которая является неприятной и временами небезопасной для пассажиров и команды, но настоящее изобретение также относится к улучшенным возможностям уменьшения последствий раскачивания и рыскания по сравнению с традиционными типами активных систем стабилизации.
Уровень техники
Способ уменьшения неприятного и временами опасного кренения лодок и кораблей на волнах создавался в течение многих лет, и имеется много принципиальных технологий, используемых с переменным успехом и результатами при различных условиях, типе судна и, в частности, стоимости выполнения и работы. Такие другие системы включают в себя бортовые управляемые рули, гироскопические стабилизаторы и сточные цистерны, чтобы упомянуть наиболее общеизвестные стабилизаторы.
Традиционные системы стабилизации, используемые на пассажирских судах, военно-морских судах и т.д., в основном предназначены для использования в процессе движения и главным образом для лодок, курсирующих в режиме перемещения и, следовательно, с относительно небольшими скоростями. Суда, на которых обычно используются стабилизаторы, из-за размера и формы корпуса имеют обычно длительный период кренения, следовательно, требуя относительно медленно действующую систему стабилизации, при этом противодействующие силы прилагаются к силам волн в течение относительно длительного периода времени. В течение последних 15 лет создавался рынок в той области, в которой также имелось требование к обеспечению стабилизации крена, если судно стоит на якоре, т.е. не двигается вперед, а также системам стабилизации, установленным на более быстроходных лодках, включая планирующие лодки. Такие изменения ставят много новых сложных задач и проблем, разъясняемых ниже.
Первая из общеизвестных проблем заключается в том, что для судна, не перемещающегося вперед по воде, следовательно, способного использовать силы в потоке воды, проходящем через бортовые управляемые рули при движении вперед судна для создания силы, чтобы противодействовать силам волн, которые кренят судно, единственным путем, которым бортовые управляемые рули могут приложить противодействующую силу, является выпуск/плавное движение бортовых управляемых рулей. Это означает, что ограничивается и максимально допустимая сила, и время, в течение которого эта сила прикладывается. Сила является результатом размера бортового управляемого руля и скоростью, с которой бортовой управляемый руль перемещается, и как противоположность, чем быстрее перемещается бортовой управляемый руль, тем короче период времени, в течение которого сила может быть приложена, так как имеется ограниченное физическое перемещение бортового управляемого руля, и также его следует остановить, одновременно не вызывая слишком большую противодействующую силу в нежелательном направлении. С математической или с физической точки зрения полный импульс силы главным образом определяется размером бортового управляемого руля.
Вторая проблема заключается в том, что современные более быстроходные суда имеют форму корпуса и вес, которые делают их естественные периоды кренения намного короче, чем у традиционных судов, на которых установлены стабилизаторы, и также что физическое требование к силе стабилизации является более высоким коэффициентом по сравнению с размером лодки в сравнении с традиционным судном, оснащенным стабилизаторами. Основной математический способ вычисления необходимой силы системы стабилизации для уменьшения крена на требуемую величину, главным образом, основывается на коэффициенте, именуемом метацентрическая высота (GM - измеритель метацентрической высоты). Это коэффициент, определяющий, как крепко судно держится на воде, т.е. чем точнее судно следует углам волн, тем больше силы требуется от системы стабилизации, чтобы противостоять этому крену, и что система стабилизации в действительности делает, так это заставляет лодку не следовать углу волны.
С учетом, что такие современные суда требуют больше силы, а также обеспечивают более короткий период времени для приложения этой силы, очевидно, что такие суда очень трудно стабилизировать.
Простым решением является установка очень больших бортовых управляемых рулей, способных добиться требуемой силы для уменьшения крена, однако это не всегда является хорошим решением по нескольким причинам, в частности, потому что очень большие бортовые управляемые рули вызывают большое сопротивление воды и, следовательно, являются причиной повышенного потребления топлива и сниженной скорости, что более важно для быстроходных судов, при условии, что сопротивление, как и все, является квадратичным коэффициентом скорости <Δ>2, поэтому воздействие на быстроходные суда становится большим. Физические размеры и потребление энергии приводных устройств, необходимых для приведения в действие больших бортовых управляемых рулей, также создают значительные проблемы, так как современные суда спроектированы с высоким приоритетом на основании доступного жизненного пространства и экономической эффективности.
Как подтверждается другими патентами и работой, проводимой в течение последних лет, было много попыток создания бортовых управляемых рулей с низким сопротивлением и систем энергоснабжения, которые являются по возможности наиболее рентабельными и энергосберегающими.
Однако третья проблема, которая очевидно не была рассмотрена в большой мере, но является важным эффектом настоящего изобретения, заключается в том, что при использовании очень больших традиционных бортовых управляемых рулей для получения необходимых сил снижения крена, это также будет иметь другие воздействия на суда, чем быстрее и легче судно, тем более негативными становятся эти воздействия. Судно имеет 6 степеней свободы движения, простое повышение традиционного импульса силы будет причиной других негативных воздействий на судно, вызывая повышенное раскачивание и рыскание и в процессе движения, и при стоянии на якоре, которые являются другими, но все же негативными воздействиями на судно.
В настоящее время общий обзор рынка показывает, что бортовые управляемые рули, даже с ограничениями настоящих бортовых управляемых рулей, обеспечивают наилучшие комплексные решения в виде единой технологичной системы, чтобы использовать и для стабилизации в процессе движения, и при стоянии на якоре, так как большинство других решений, подобно гироскопам или цистернам стабилизации, не выполняются хорошо в процессе движения более быстроходных судов. Однако проблема способности приложить достаточную силу при стоянии на якоре или при высокой скорости легких судов, не вызывая слишком много других негативных последствий для судна, в основном, все еще остается нерешенной в отношении бортовых управляемых рулей.
Одно решение по улучшению ситуации представлено в патенте US 2007/0272143/ЕР 1577210, в котором описываются бортовые управляемые рули, которые обладают способностью изменять размер и форму, чтобы, таким образом, иметь другой размер в процессе движения или при стоянии на якоре, повышая возможную силу, не вызывая дополнительное сопротивление, если в этом нет необходимости.
В европейской заявке ЕР 1577210 А1 описывается активная система стабилизации крена, содержащая бортовые управляемые рули с субэлементами, причем субэлементы являются подвижными, т.е. присоединены к бортовым управляемым рулям.
В патенте US 2223562 А описывается бортовой управляемый руль с основанием бортового управляемого руля, имеющего заднюю и переднюю кромки, причем основание бортового управляемого руля выполнено с возможностью вращения вокруг оси, перпендикулярной корпусу лодки.
Другими известными решениями являются выдвижные бортовые управляемые рули, которые только разворачиваются в воду при необходимости, таким образом, не создавая сопротивления, когда в этом нет необходимости. Оба решения используются очень редко на судах с ограниченным пространством для установки и ресурсами в силу их сложности, требований к внутреннему пространству и стоимости.
Также имеется много других патентов и заявок на патенты на различные средства и способы по увеличению эффективности бортовых управляемых рулей, большинство из них относятся к различным типам приводного механизма или управляющих алгоритмов и, следовательно, не имеют отношения к изобретению.
Раскрытие изобретения
Задачей настоящего изобретения является раскрытие активной системы стабилизации для судна, которая является более эффективной, чем известный уровень техники.
Одна из проблем технологии известного уровня техники заключается в том, что успокоители бортовой качки могут вызывать раскачивание или рыскание судна из-за больших сил, прилагаемых к стабилизаторам, и тем самым создают другое неприятное для пассажиров перемещение, представленное выше.
Таким образом, задачей изобретения является раскрытие активной системы стабилизации, которая способна стабилизировать кренение судна при стоянии на якоре и в процессе движения, без внесения других неприятных перемещений судна.
Проблема, связанная с конструкцией системы стабилизации, противодействующей крену, заключается в том, что бортовые управляемые рули не должны продолжаться снаружи корпуса в боковом направлении. Многие лодки, особенно прогулочные лодки, имеют плоский V-образный корпус, это означает, что бортовые управляемые рули должны располагаться под плоской частью, что дает немного свободы для различных перемещений бортовых управляемых рулей.
Настоящим изобретением разрешена проблема способности приложения достаточной силы для уменьшения крена активной системой бортовых управляемых рулей, чтобы значительно уменьшить кренение судна, вызываемое волнами, сохраняя в то же время негативные действия, такие как повышенное потребление топлива, сниженная скорость, прямое потребление энергии системы стабилизации, потребление пространства внутри судна, первоначальные инвестиционные расходы, стоимость работы и технического обслуживания, и сведения других неприятных перемещений судна к минимуму.
Раскрытое решение предполагает использовать конструкцию бортового управляемого руля, которая изменяет направление силы, создаваемой бортовыми управляемыми рулями и во время движения, и при стоянии на якоре, чтобы результирующие силы были направлены по большей части в нужном направлении, чем в системах известного уровня техники, чтобы только противостоять крену. Поскольку направление приложенных сил более идеальное для предлагаемой задачи, бортовые управляемые рули могут быть меньше по размеру, вызывая меньше сопротивления, иметь такую же силу уменьшения крена при значительно меньшем прямом потреблении энергии и быть способными приложить больше силы в нужном направлении и, следовательно, вызывать меньше других нежелательных перемещений судна.
Независимый анализ на основании математических моделей показал, что новейшая и соответствующая изобретению форма бортовых управляемых рулей согласно изобретению решает упомянутые выше проблемы.
Таким образом, изобретением согласно одному варианту является бортовой управляемый руль для судна с корпусом, при этом бортовой управляемый руль содержит:
- основание (11) руля, выполненное с возможностью шарнирного прикрепления к корпусу с помощью поворотного устройства (20), чтобы упомянутый бортовой управляемый руль (10) мог вращаться вокруг оси p вращения,
- верхнюю оконечность (30) руля,
- переднюю кромку (12), и
- заднюю кромку (13),
при этом переднее направление (f) бортового управляемого руля (10) определяется от задней кромки (13) до передней кромки (12) у основания (11) руля, и при этом задняя кромка (13) у верхней оконечности (30) руля изгибается от плоскости (15), определяемой передним направлением (f) и осью (р) вращения, чтобы придать задней кромке (13) вогнутый профиль в боковом направлении (Id) перпендикулярно плоскости (15).
В одном из вариантов изобретением также является активная система бортовых управляемых рулей для судна с корпусом, имеющим диаметральную линию, при этом активная система бортовых управляемых рулей содержит:
- первый бортовой управляемый руль (10) по п. 1 с первым поворотным устройством, выполненным с возможностью прикрепления к корпусу (2) на стороне левого борта диаметральной линии,
- второй бортовой управляемый руль (10) по п. 1 со вторым поворотным устройством, выполненным с возможностью прикрепления к корпусу (2) на стороне правого борта диаметральной линии,
причем верхние оконечности (30) первого и второго бортовых управляемых рулей (10, 10) изогнуты в противоположных боковых направлениях от диаметральной линии, первое и второе поворотные устройства (20) выполнены с возможностью поворота первого бортового управляемого руля (10) и второго бортового управляемого руля (10) соответственно,
- датчик (80) крена, и
- систему (70) управления, при этом система управления выполнена с возможностью получения сигналов индикации крена от датчика (60) крена и дополнительно выполнена с возможностью передачи сигналов управления на первое и второе поворотные устройства (20) для вращения первого и второго бортовых управляемых рулей (10), чтобы противостоять крену судна.
Таким образом, изобретение предусматривает значительно возросшую силу уменьшения крена по сравнению с размером бортовых управляемых рулей, потреблением энергии, технической сложностью, негативными воздействиями во время движения судна и стоимостью на основном уровне, полностью независящие от исполнительной техники, которая используется, т.е. изобретение предусматривает одинаковые выгоды для всей приводной техники.
Краткое описание чертежей
На прилагаемых чертежах показаны некоторые варианты заявленного изобретения.
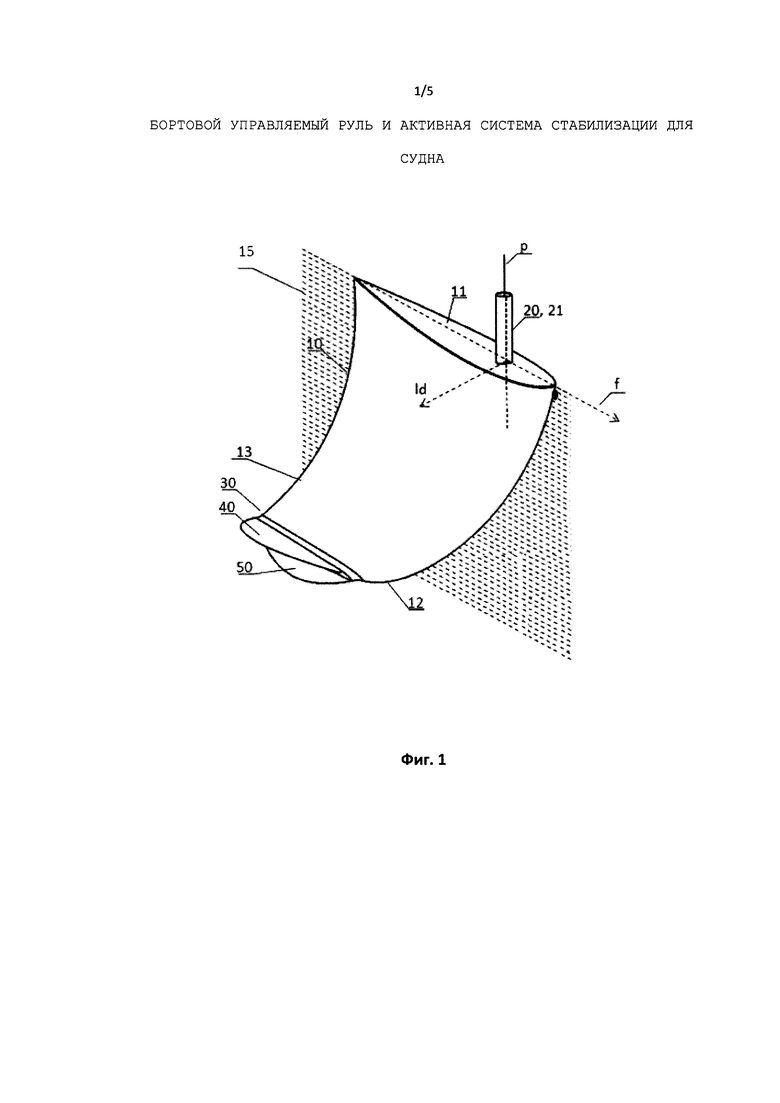
На Фиг. 1 показан вид в изометрии бортового управляемого руля согласно изобретению.
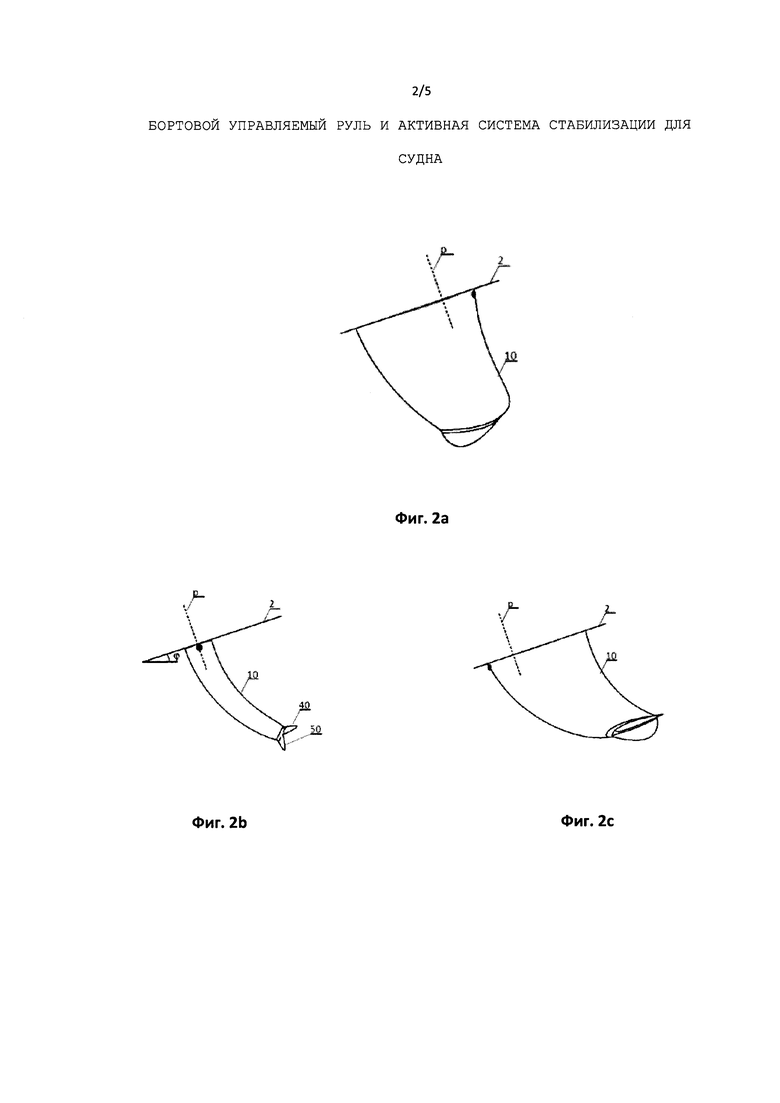
На Фиг. 2а, 2b, 2с показан бортовой управляемый руль согласно варианту изобретения, поворачивающийся вокруг оси (р) вращения в три разных положения.
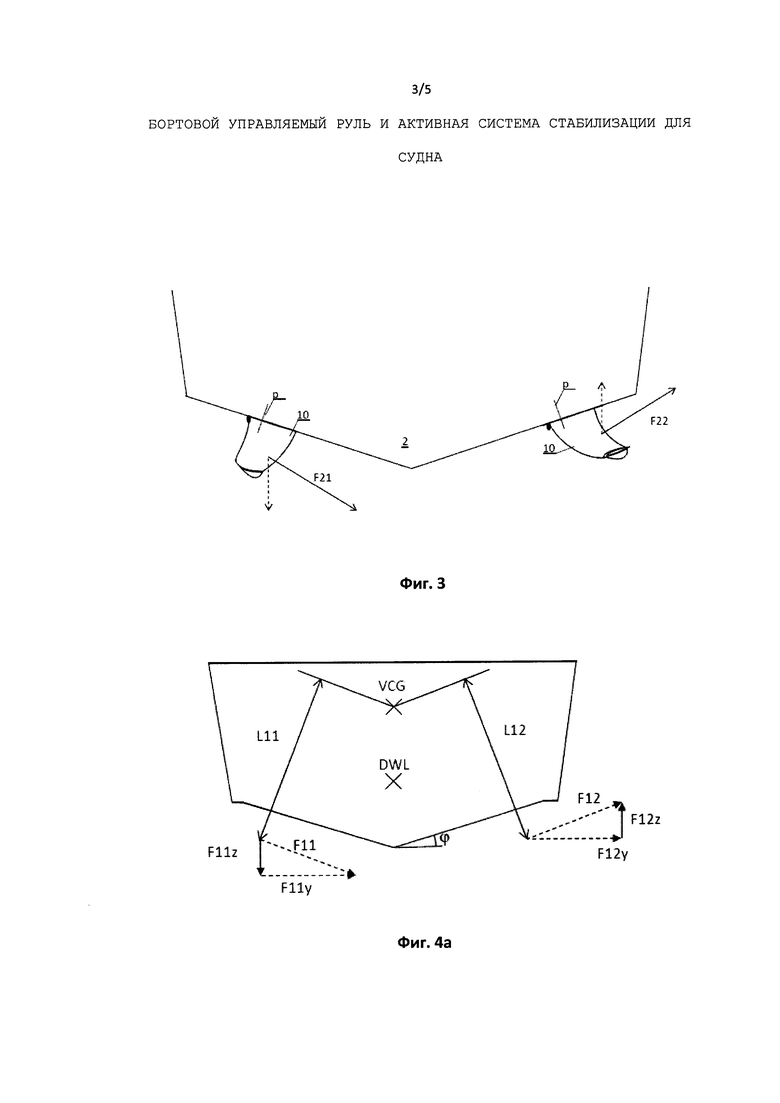
На Фиг. 3 показаны два бортовых управляемых руля согласно варианту изобретения, прикрепленных к борту лодки.
На Фиг. 4а показан результирующий импульс силы, прикладываемый к лодке рулями согласно известному уровню техники.
На Фиг. 4b показан результирующий импульс силы, прикладываемый к лодке рулями согласно изобретению.
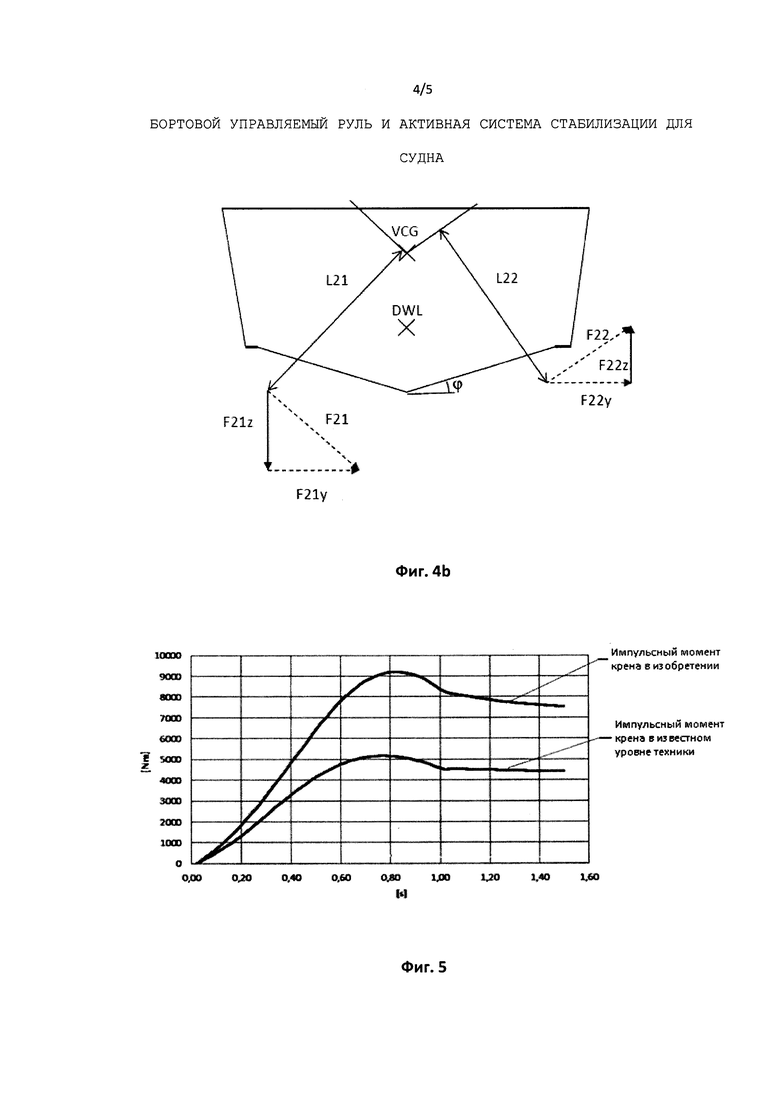
На Фиг. 5 графически показан повышенный импульс силы в направлении крена в сравнении с известным уровнем техники
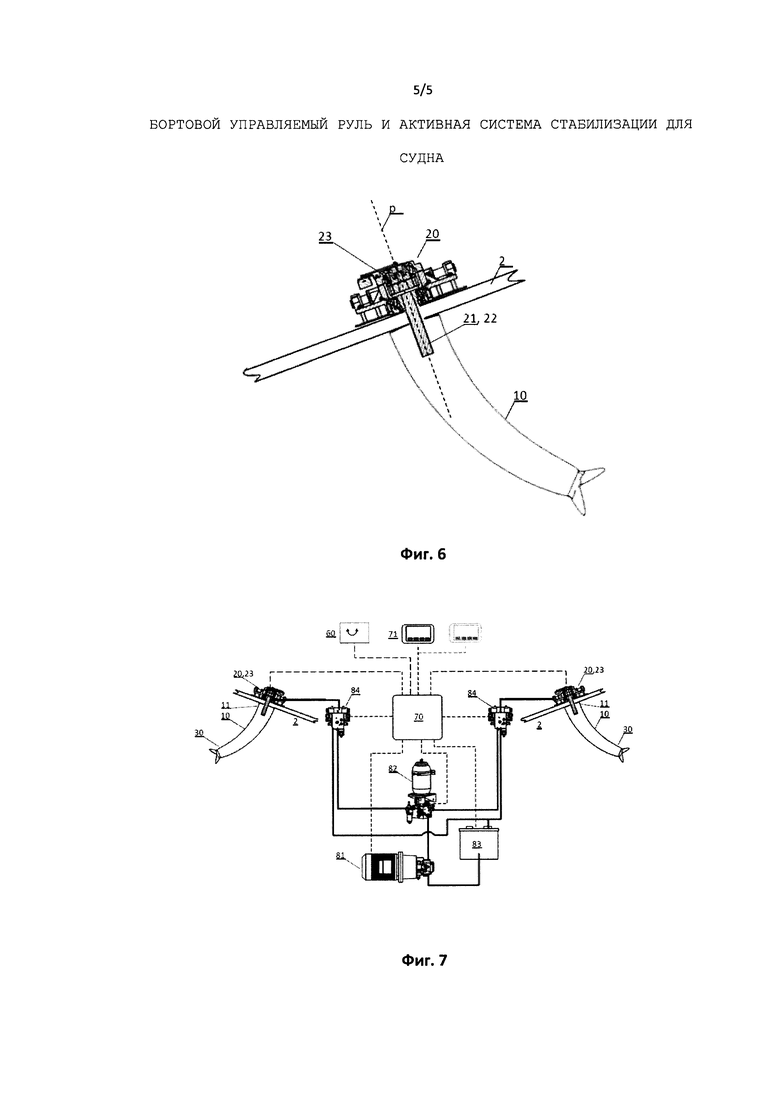
На Фиг. 6 показан бортовой управляемый руль, установленный под корпусом лодки, и приводное устройство внутри лодки.
На Фиг. 7 показана активная система бортового управляемого руля согласно варианту изобретения.
Осуществление изобретения
Ниже будет описано изобретение, а варианты изобретения будут разъяснены со ссылкой на прилагаемые чертежи.
Чтобы облегчить понимание чертежей, передняя кромка руля отмечена пунктиром. Такая маркировка никаким иным образом не относится к изобретению
На Фиг. 1 показан бортовой управляемый руль согласно изобретению.
В этом варианте бортовой управляемый руль содержит:
- основание (11) руля, выполненное с возможностью шарнирного прикрепления к корпусу с помощью поворотного устройства (20), чтобы упомянутый бортовой управляемый руль (10) мог вращаться вокруг оси p вращения,
- верхнюю оконечность (30) руля,
- переднюю кромку (12), и
- заднюю кромку (13),
при этом переднее направление (f) бортового управляемого руля (10) определяется от задней кромки (13) до передней кромки (12) у основания (11) руля, и при этом задняя кромка (13) у верхней оконечности (30) руля изгибается от плоскости (15), определяемой передним направлением (f) и осью (р) вращения, чтобы придать задней кромке (13) вогнутый профиль в боковом направлении (Id) перпендикулярно плоскости (15).
Следует отметить, что плоскость (15), показанная на Фиг. 1, которая определяет направления руля согласно изобретению, также может представлять направление рулей согласно известному уровню техники, при этом корпус руля известного уровня техники обычно находился бы в плоскости (15).
В варианте ось (р) вращения перпендикулярна основанию (11) руля.
Можно использовать различные типы профилей для увеличения сил, противодействующих крену, например профили с одним или более отдельными изгибами или плавный изогнутый профиль.
Согласно варианту вогнутый профиль задней кромки (13) выполнен изогнутым.
Согласно варианту задняя кромка (13) у верхней оконечности (30) руля изогнута от плоскости (15) по меньшей мере на 15° от задней кромки (13) у основания (11) руля.
Согласно варианту задняя кромка (13) у верхней оконечности (30) руля изогнута от плоскости (15) по меньшей мере на 20° от задней кромки (13) у основания (11) руля.
На Фиг. 2а, 2b и 2с показано, как можно сконструировать такой руль для крепления под стороной левого борта корпуса. Бортовой управляемый руль показан в трех положениях, все видны спереди. На Фиг. 2b руль находится в нейтральном положении, т.е. в положении, в котором руль не создавал бы силы, противодействующие крену, если судно не кренится в стоячей воде. На Фиг. 2а показан руль, поворачивающийся задней частью по направлению к диаметральной линии лодки, и на Фиг. 2с показан руль, поворачивающийся задней частью в противоположном направлении к стороне правого борта лодки.
Руль согласно изобретению выполнен из улучшенной в гидродинамическом отношении фольги, форма которой такова, что результирующая сила при вращении в потоке воды или при быстром вращении в процессе плавания будет вызывать вектор результирующей силы, который больше в направлении противодействия крену и меньше в боковом направлении, т.е. в направлении раскачивания и рыскания в сравнении с рулями известного уровня техники. Руль также имеет такую форму, чтобы уменьшить сопротивление, в то же время способен увеличить силу.
Настоящее изобретение решает проблему, оставшуюся в известном уровне техники, т.е. где устанавливать рули, чтобы они только непосредственно прилагали силу и только в нужном направлении, чтобы противодействовать крену. Рули согласно известному уровню техники прилагают силу в направлении, параллельном направлению к углу дифферента, где они установлены. Затем это трансформируется в силу крена силой, представленной силой, действующей вокруг центра гравитации лодки, относительно которого математически предполагается кренение, при этом центр гравитации можно считать опорой. Однако поскольку лодка плавает по воде, центр гравитации в действительности не является фиксированной точкой опоры, он только действует в качестве опоры в пределах ограничения инерции в направлениях, в которых мы не хотим, чтобы он двигался, подобно перемещениям раскачивания и рыскания. По сути дела проблемой с инерцией лодки в нежелательных направлениях движения является четкий ограничивающий фактор для полного импульса силы, который можно приложить, следовательно, увеличение силы в неточном направлении не решит всей проблемы и будет требовать компромисса, на каком уровне вы можете ее практически приложить, чтобы противодействовать крену без других негативных воздействий, особенно на современных легких судах. В то же время настоящее изобретение будет также повышать эффективность на более тяжелых традиционных судах, на которых потенциал рыскания и раскачивания не такой доминирующий в силу их более высоких уровней инерции.
На Фиг. 2а, 2b, 2с показан руль (10) согласно варианту изобретения, видимый спереди под стороной левого борта корпуса (2) с углом килеватости (ϕ). На Фиг. 2b руль (10) показан в нейтральном положении, т.е. не прикладывает силы в направлении крена, если вода спокойная, и лодка не кренится.
На Фиг. 2а показан руль в положении, в котором задняя часть руля принудительно направлена к диаметральной линии лодки, а на Фиг. 2с показан руль в положении, в котором задняя часть руля принудительно отведена от диаметральной линии лодки. Если руль перемещается по направлению к диаметральной линии, борт лодки, где расположен руль, будет подниматься, в то же время борт будет опускаться, если руль перемещается к борту лодки.
На Фиг. 3 показан пример лодки с двумя рулями (10), прикрепленными к корпусу (2), по одному с каждой стороны диаметральной линии. На этом чертеже рули показаны в положении вращения, чтобы противостоять движению крена. Силы (F1, F2) показывают результирующие силы движения руля, воздействующие на лодку. Силы, противодействующие крену, являются вертикальной составляющей сил, показанных пунктирными стрелками.
Повышение эффективности стабилизации, препятствующей крену, подтверждено математическими моделями и системами моделирования, которые показывают значительное изменение по сравнению с традиционными активными бортовыми управляемыми рулями с прямым корпусом.
На Фиг. 4 показаны результаты моделирования конкретной примерной лодки. Лодкой является лодка длиной 56 футов с ходовым мостиком, имеющая угол килеватости (ϕ), равный 16,5°. Дополнительно высота от основной плоскости до расчетной ватерлинии (DWL) составляет 0,86 м и от расчетной ватерлинии до вертикального центра гравитации (VCG) составляет 0,99 м.
Две конструкции руля требуют одинаковой силы, прикладываемой приводами, действующей на рули.
Силы, действующие на лодку при активации рулей, зависят от момента, прикладываемого к рулю, и длины плеча кренящего момента. В последующем описании правый борт находится справа на чертежах.
На Фиг. 4а показаны результирующие силы, действующие на лодку, если используются традиционные прямые бортовые управляемые рули согласно известному уровню техники, а на Фиг. 4b показаны силы, исходящие от усовершенствованного бортового управляемого руля согласно известному уровню техники.
На Фиг. 4а плечо (L11, L12) кренящего момента одинаково и с правого борта, и с левого борта, в данном случае 2,27 м, поскольку прямые рули также симметричны относительно диаметральной линии при активации. Результирующая чистая сила (F1, F2) на каждый руль составляет 1325 Н. Это позволяет получить крутящий момент 6015 Нм.
На Фиг. 4b рули на правом борту и на левом борту будут асимметричны при активации, как показано на Фиг. 3, и плечи кренящего момента будут разными. Плечо (L21) на левом борту составляет 2,55 м, а плечо (L22) на правом борту составляет 2,49 м. Результирующие чистые силы (F21, F22) с левого и правого бортов на каждый руль составляют 1610 H и 1310 H соответственно.
Это позволяет получить крутящий момент 7396 Нм. В данном случае полное улучшение крутящего момента крена составляет 23%. Подобная модель также покажет, что поперечные составляющие силы, действующие на лодку, снижены на 8%.
При разложении векторов (F11, F12) сил на Фиг. 4а и векторов (F21, F22) сил на Фиг. 4b очевидно, что силы в направлении крена значительно увеличены и что силы в направлении раскачивания и рыскания уменьшены.
Если лодка стоит на якоре, имеется небольшое сопротивление или совсем не имеется сопротивления или подъем на бортовой управляемый руль, который можно использовать для противодействия движениям крена. В этом случае рули должны стабилизировать лодку, просто толкая воду вниз с одной стороны и толкая воду вниз с другой стороны, и такие движения, противодействующие крену, следует предпринимать мгновенно, чтобы предотвратить крен.
В этом режиме улучшенная эффективность бортовых управляемых рулей согласно изобретению даже больше, чем в крейсерском режиме. Для такой же лодки длиной 56 футов с ходовым мостиком импульсный момент крена сравнили с известным уровнем техники с прямыми рулями, и результаты суммировали на Фиг. 5, на которой видно, что момент крена значительно лучше в изобретении, чем в известном уровне техники в отношении движений, препятствующих крену.
Согласно варианту изобретения поперечное сечение бортового управляемого руля имеет профиль NACA. Согласно варианту профиль является асимметричным с большей кривизной на вогнутой стороне, чем на выпуклой стороне. Это компенсирует меньшую вогнутую поверхность, что придало бы еще сопротивление или подъем с другой стороны бортового управляемого руля.
Дополнительный предпочтительный эффект можно получить, снабдив бортовой управляемый руль концевыми крылышками на верхней оконечности руля. Концевые крылышки известны из предыдущего уровня техники, причем они продолжаются перпендикулярно от верхней оконечности руля. Однако согласно варианту изобретения бортовой управляемый руль содержит первый вспомогательный руль (40), продолжающийся от верхней оконечности (30) руля в боковом направлении (Id), который улучшает свойства, препятствующие крену руля, не создавая нежелательные кавитационные каверны.
Согласно варианту бортовой управляемый руль содержит первый вспомогательный руль (40), продолжающийся от верхней оконечности (30) руля параллельно основанию (11) в боковом направлении (Id). Это показано на Фиг. 1 и Фиг. 2b. Затем первый вспомогательный руль (40) будет направлять силу при поворачивании или плавании в направлении, которое не параллельно поверхности корпуса. В варианте руль (10) содержит второй вспомогательный руль (50), продолжающийся от верхней оконечности (30) руля, при этом второй вспомогательный руль (50) продолжается в направлении, перпендикулярном основанию (11) руля. Как и в отношении первого вспомогательного руля (40), второй вспомогательный руль (50) также способствует свойствам, препятствующим крену, не создавая нежелательные кавитационные каверны. Бортовой управляемый руль может иметь только первый вспомогательный руль (40), только второй вспомогательный руль (50) или оба вспомогательных руля.
На Фиг. 6 показан вариант поворотного устройства (20), на котором видно, что руль (10) шарнирно прикреплен к корпусу (2) поворотным устройством (20). В этом варианте руль имеет отверстие (22) от основной плоскости в руль. Направление и центр отверстия расположены соответственно в направлении и центре оси (р) вращения. Ось (21) привода зафиксирована в отверстии, например, клеем или альтернативным крепежным средством и продолжается, проникая в корпус (2). Внутри корпуса (2) блок (23) привода прикреплен к корпусу (2), и блок привода выполнен с возможностью получения и крепления оси (21) привода, чтобы предотвратить ее уклонение. Модуль (23) привода является двухходовым приводом, выполненным с возможностью смещения оси (21) в угловом направлении, чтобы заставить руль (10) поворачиваться вокруг оси (р) в процессе работы.
Модуль (23) привода можно привести в действие целым рядом источников питания прямого или опосредованного действия, например гидравлические цилиндры, электромеханические приводы, электродвигатели любого типа, рычагов в сборе с механическим сопряжением или подобных устройств через вал или другой подходящий способ прямого соединения.
В одном из вариантов изобретения опорное или приводное устройство имеет механическую конструкцию, которая изменяет угол вала, или способ другого подходящего соединения упомянутой новой конструкции руля или традиционной прямой конструкции руля для достижения одинакового измененного направления силы либо, в основном, всегда, либо фактически как регулируемый угол для единовременной установки, или как переменную функцию в зависимости от условия использования в тот момент, например, при стоянии на якоре.
На Фиг. 7 показана блок-схема активной системы бортового управляемого руля согласно варианту изобретения.
Части левого и правого бортов корпуса (2) с соответствующими бортовыми управляемыми рулями (10) и поворотным устройством (20), содержащим приводы (23), показаны слева и справа на чертеже. Диаметральная линия не показана, но располагается между частями корпуса (2) в реальной системе. Согласно изобретению верхние оконечности (30) руля изогнуты или искривлены в противоположных направлениях от диаметральной линии.
В этом варианте изобретением является активная система бортовых управляемых рулей для судна с корпусом (2), имеющим диаметральную линию, при этом активная система бортовых управляемых рулей содержит:
- первый бортовой управляемый руль (10) по п. 1 с первым поворотным устройством, выполненным с возможностью прикрепления к корпусу (2) на стороне левого борта диаметральной линии,
- второй бортовой управляемый руль (10) по п. 1 со вторым поворотным устройством, выполненным с возможностью прикрепления к корпусу (2) на стороне правого борта диаметральной линии,
причем верхние оконечности (30) первого и второго бортовых управляемых рулей (10, 10) изогнуты в противоположных боковых направлениях от диаметральной линии,
- первое и второе поворотные устройства (20) выполнены с возможностью поворота первого бортового управляемого руля (10) и второго бортового управляемого руля (10) соответственно,
- датчик (60) крена, и
- систему (70) управления, при этом система управления выполнена с возможностью получения сигналов индикации крена от датчика (60) крена и дополнительно выполнена с возможностью передачи сигналов управления на первое и второе поворотные устройства (20) для вращения первого и второго бортовых управляемых рулей (10), чтобы противостоять крену судна.
На Фиг. 7 пунктирные линии представляют электрические соединения, а сплошные линии представляют гидравлические соединения.
Другим компонентом, показанным на чертеже, является гидравлический насос (81). Это может быть аккумулятор с приводом от электродвигателя или другой подходящий насос.
Дополнительно к гидробаку (83) гидравлический аккумулятор (82) и клапаны (84) являются общими компонентами гидравлической системы.
Иллюстрация на Фиг. 7 является одним из примеров, как применить активную систему стабилизации согласно изобретению. При других применениях может быть, например, один насос для каждого бортового управляемого руля, электрические приводы и т.д.
Датчик (60) крена посылает сигналы крена на систему (70) управления, которая открывает и закрывает клапаны (84) в зависимости от текущего крена.
Можно использовать одну или более панелей (71) управления для установки параметров крена, например включения и выключения противодействия крену, и для представления параметров крена оператору.
Согласно варианту изобретения система управления выполнена с возможностью посылки сигналов управления на первое и второе поворотные устройства (20) для поворачивания первого и второго бортовых управляемых рулей (10) в одном и том же боковом направлении (Id) одновременно.
Система согласно изобретению может содержать больше чем два бортовых управляемых руля. Предпочтительно количество рулей четное, например, 2, 4 и т.д.
Активная система бортовых управляемых рулей содержит:
- третий бортовой управляемый руль (10) по п. 1, выполненный с возможностью прикрепления к корпусу (2) на стороне левого борта диаметральной линии,
- четвертый бортовой управляемый руль (10) по п. 1, выполненный с возможностью прикрепления к корпусу (2) на стороне правого борта диаметральной линии,
причем верхние оконечности (30) третьего и четвертого бортовых управляемых рулей (10, 10) изогнуты в противоположных боковых направлениях от диаметральной линии,
- третье и четвертое поворотные устройства (20) по п. 5 выполнены с возможностью поворачивания третьего бортового управляемого руля (10) и четвертого бортового управляемого руля (10) соответственно,
причем первый и второй бортовые управляемые рули (10, 10) выполнены с возможностью установки на первом расстоянии от кормы судна, и
третий и четвертый бортовые управляемые рули (10, 10) выполнены с возможностью установки на втором расстоянии от кормы судна.
Согласно варианту пары бортовых управляемых рулей можно приводить в действие независимо, т.е. первую пару, содержащую первый и второй бортовые управляемые рули (10), и вторую пару, содержащую третий и четвертый бортовые управляемые рули (10). Это может быть предпочтительным, если лодка работает в разных режимах, например в крейсерском или стоянии на якоре. В варианте передняя пара работает только при стоянии на якоре, а задняя пара работает только в крейсерских режимах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ спрямления крена быстроходного судна | 1983 |
|
SU1102708A1 |
| ЛЕДОКОЛЬНАЯ СИСТЕМА ДЛЯ ПЛАВАЮЩИХ ТЕЛ | 2009 |
|
RU2483967C2 |
| Способ управляемого изменения крена автономного необитаемого подводного аппарата | 2024 |
|
RU2823820C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СУДНА (ВАРИАНТЫ) | 2010 |
|
RU2418713C1 |
| СУДНО ПЕРЕДНЕПРИВОДНОЕ С АЭРОДИНАМИЧЕСКОЙ РАЗГРУЗКОЙ | 2014 |
|
RU2562473C1 |
| СПОСОБ "ПРОМЕТЕЙ" РАБОТЫ ПОДВОДНОЙ ЛОДКИ | 2000 |
|
RU2185992C1 |
| ГИРОСТАБИЛИЗАТОР | 2020 |
|
RU2813627C1 |
| СУДНО НА ПОДВОДНЫХ КРЫЛЬЯХ (ВАРИАНТЫ) | 1993 |
|
RU2057674C1 |
| АМФИБИЙНОЕ СУДНО НА ВОЗДУШНОЙ ПОДУШКЕ | 1997 |
|
RU2126753C1 |
| КОЛЕСНЫЙ ДВИЖИТЕЛЬНО-РУЛЕВОЙ КОМПЛЕКС СУДНА ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2456201C1 |
Изобретение относится к области судостроения и касается системы стабилизации судна. Предложены бортовой управляемый руль и активная система стабилизации судна. Бортовой управляемый руль содержит основание (11) руля, выполненное с возможностью шарнирного прикрепления к корпусу судна с помощью поворотного устройства (20) и вращения вокруг оси (p) вращения, верхнюю оконечность (30) руля, переднюю кромку (12) и заднюю кромку (13), при этом переднее направление (f) бортового управляемого руля (10) определяется от задней кромки (13) до передней кромки (12) у основания (11) руля, и задняя кромка (13) у верхней оконечности (30) руля изогнута от плоскости (15), определяемой передним направлением (f) и осью (р) вращения, чтобы придать задней кромке (13) вогнутый профиль в боковом направлении (Id) перпендикулярно плоскости (15). Технический результат заключается в повышении эффективности активной системы стабилизации судна. 2 н. и 10 з.п. ф-лы, 10 ил.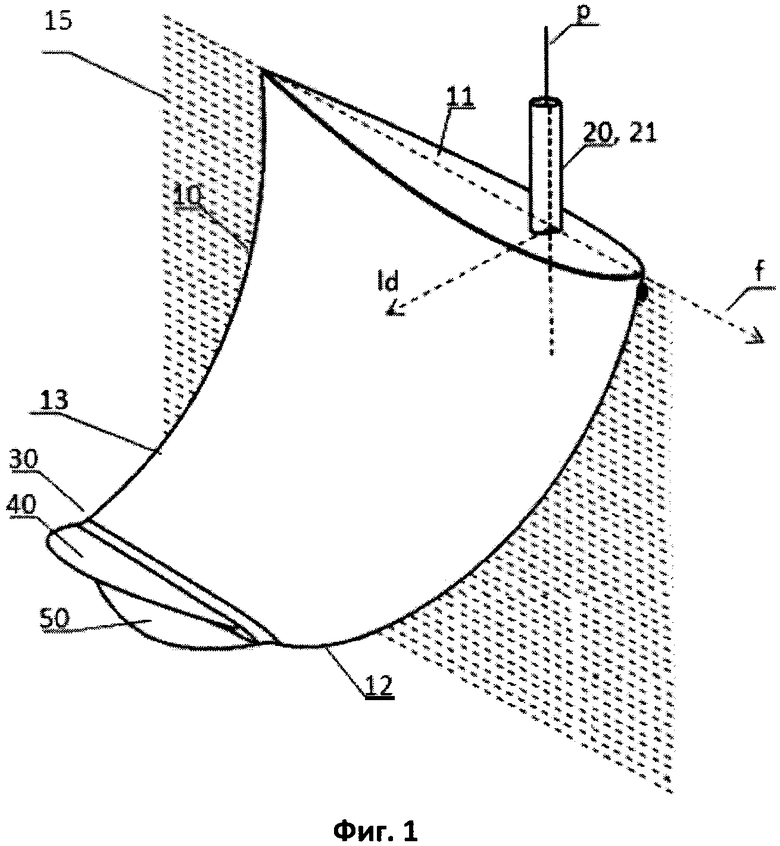
1. Бортовой управляемый руль (10) для судна с корпусом (2), при этом бортовой управляемый руль (10) содержит:
- основание (11) руля, выполненное с возможностью шарнирного прикрепления к корпусу с помощью поворотного устройства (20), чтобы упомянутый бортовой управляемый руль (10) мог вращаться вокруг оси p вращения,
- верхнюю оконечность (30) руля,
- переднюю кромку (12) и
- заднюю кромку (13),
при этом переднее направление (f) упомянутого бортового управляемого руля (10) определяется от упомянутой задней кромки (13) до упомянутой передней кромки (12) у упомянутого основания (11) руля, отличающийся тем, что задняя кромка (13) у верхней оконечности (30) руля изгибается от плоскости (15), определяемой передним направлением (f) и осью (p) вращения, чтобы придать задней кромке (13) вогнутый профиль в боковом направлении (Id) перпендикулярно плоскости (15).
2. Бортовой управляемый руль по п. 1, отличающийся тем, что поперечное сечение бортового управляемого руля (10) имеет профиль NACA.
3. Бортовой управляемый руль по п. 1 или 2, отличающийся тем, что упомянутая ось (p) вращения перпендикулярна основанию (11) руля.
4. Бортовой управляемый руль по п. 1, отличающийся тем, что вогнутый профиль задней кромки (13) изогнут.
5. Бортовой управляемый руль по п. 1, отличающийся тем, что задняя кромка (13) у верхней оконечности (30) руля изгибается от плоскости (15) по меньшей мере на 15° от задней кромки (13) у основания (11) руля.
6. Бортовой управляемый руль по п. 1, содержащий первый вспомогательный руль (40), продолжающийся от верхней оконечности (30) руля параллельно основанию (11) руля в боковом направлении (Id).
7. Бортовой управляемый руль по п. 6, содержащий второй вспомогательный руль (50), продолжающийся от верхней оконечности (30) руля, при этом второй вспомогательный руль (50) продолжается в направлении, перпендикулярном основанию (11) руля.
8. Бортовой управляемый руль по п. 1, при этом поворотное устройство (20) содержит:
- ось (21) привода, выполненную с возможностью прикрепления к основанию (11) руля и продолжающуюся от основания (11) руля в направлении оси (p) вращения,
- привод (23), выполненный с возможностью крепления внутри корпуса (2) и дополнительно выполненный с возможностью получения и закрепления оси (21) привода через отверстие в корпусе (2).
9. Активная система бортовых управляемых рулей для судна с корпусом (2) с диаметральной линией, при этом активная система бортовых управляемых рулей, отличающаяся тем, что содержит:
- первый бортовой управляемый руль (10) по любому пп. 1-7 с первым поворотным устройством, выполненным с возможностью прикрепления к корпусу (2) на стороне левого борта диаметральной линии,
- второй бортовой управляемый руль (10) по любому пп. 1-7 со вторым поворотным устройством, выполненным с возможностью прикрепления к корпусу (2) на стороне правого борта диаметральной линии, причем верхние оконечности (30) первого и второго бортовых управляемых рулей (10, 10) изогнуты в противоположных боковых направлениях от диаметральной линии,
- первое и второе поворотные устройства (20), выполненные с возможностью поворачивания первого бортового управляемого руля (10) и второго бортового управляемого руля (10) соответственно,
- датчик (60) крена, и
- систему (70) управления, при этом упомянутая система управления выполнена с возможностью получения сигналов индикации крена от упомянутого датчика (60) крена и дополнительно выполнена с возможностью передачи сигналов управления на первое и второе поворотные устройства (20) для вращения первого и второго бортовых управляемых рулей (10), чтобы противостоять крену судна.
10. Активная система бортовых управляемых рулей по п. 9, отличающаяся тем, что упомянутая система управления выполнена с возможностью подачи сигналов управления на первое и второе поворотные устройства (20), чтобы одновременно поворачивать первый и второй бортовой управляемый руль в одном и том же боковом направлении (Id).
11. Активная система бортовых управляемых рулей по п. 8 или 9, содержащая:
- третий бортовой управляемый руль (10) по п. 1, выполненный с возможностью прикрепления к корпусу (2) на стороне левого борта диаметральной линии,
- четвертый бортовой управляемый руль (10) по п. 1, выполненный с возможностью прикрепления к корпусу (2) на стороне правого борта диаметральной линии,
причем верхние оконечности (30) третьего и четвертого бортовых управляемых рулей (10, 10) изогнуты в противоположных боковых направлениях от диаметральной линии,
- третье и четвертое поворотные устройства (20) по п. 5, выполненные с возможностью поворачивания третьего бортового управляемого руля (10) и четвертого бортового управляемого руля (10) соответственно,
причем первый и второй бортовые управляемые рули (10, 10) выполнены с возможностью установки на первом расстоянии от кормы судна, и
третий и четвертый бортовые управляемые рули (10, 10) выполнены с возможностью установки на втором расстоянии от кормы судна.
12. Активная система бортовых управляемых рулей по п. 11, отличающаяся тем, что упомянутая система (70) управления выполнена с возможностью управления первым и вторым бортовыми управляемыми рулями (10, 10) независимо от третьего и четвертого бортовых управляемых рулей (10, 10).
| СПОСОБ ОБРАЩЕНИЯ С ТВЕРДЫМИ НИЗКОРАДИОАКТИВНЫМИ ОТХОДАМИ | 2002 |
|
RU2223562C1 |
| ПЕРФОРАТОР ПРОКАЛЫВАЮЩИЙ | 2000 |
|
RU2172394C1 |
| US 2007272143 A1, 29.11.2007 | |||
| Успокоитель качки | 1978 |
|
SU796068A1 |
| US 3570438 A, 16.03.1971. | |||

