Область техники, к которой относится настоящее изобретение
Настоящее изобретение относится к технологии стабилизации положения лодок и кораблей. В частности, настоящее изобретение относится к гироскопическому стабилизатору с магнитным подвесом, который может быть использован для противодействия движению с креном.
Уровень техники
Гиростабилизаторы предшествующего уровня техники для судов работают на прочно устоявшемся принципе стабилизации движения крена лодки или судна, который основан на использовании уравновешивающего крутящего момента, создаваемого гиростабилизатором с помощью маховика или ротора, который вращается в карданном подвесе.
После установки гиростабилизатора на лодке или судне он будет располагаться с перпендикулярно ориентированными относительно друг друга осями, такими как ось вращения маховика, ось карданного подвеса и ось крена судна, при этом ось крена судна будет проходить в продольном направлении судна. Момент количества движения вращающегося маховика представляет собой сохраняющуюся физическую величину, и при крене судна маховик будет прецессировать для сохранения момента количества движения. Прецессия будет создавать уравновешивающий крутящий момент, противодействующий крутящему моменту крена, воздействующему на корпус судна, благодаря чему гиростабилизатор будет проявлять тенденцию к выравниванию судна.
Во время прецессии, т.е. во время совершения гироскопом прецессионного движения с целью противодействия крену, угол маховика относительно корпуса судна будет меняться, в результате чего возникают составляющие крутящего момента в направлении движения рыскания и/или тангажа. Однако судно, как правило, обладает устойчивостью как к вращению по рысканию, так и к вращению по тангажу, но по мере увеличения указанного угла маховика эффективность стабилизации крена снижается.
Один из примеров реализации такого гироскопического стабилизатора крена приведен в патентах US20050076726A1 и US2005274210 A1. Этот стабилизатор включает в себя маховик или ротор; приводной двигатель маховика, выполненный с возможностью обеспечения вращения маховика вокруг оси вращения; карданный подвес, выполненный с возможностью обеспечения прецессии маховика относительно оси карданного подвеса; и устройство для приложения крутящего момента к маховику относительно оси карданного подвеса. Маховик и карданный подвес сконфигурированы таким образом, что при установке на судне стабилизатор демпфирует движение крена судна. Электродвигатель, соединенный с осью вращения, ускоряет вращение ротора до требуемых оборотов. Маховик может быть установлен в вакуумной камере для уменьшения лобового сопротивления воздуха. Первая ссылочная позиция указывает на то, что ротор может вращаться с частотой 10 000 об/мин или выше.
Однако, как было подтверждено патентом WO2007095403 A2, тяжелый маховик, вращающийся на больших оборотах, опирается на подшипники, которые подвергаются воздействию больших осевых и радиальных нагрузок, вследствие чего эти подшипники выделяют большое количество образуемого при трении тепла, которое должно рассеиваться во избежание опасного нагрева.
В патенте CN 102381452A описан гиростабилизатор для лодки, в котором при увеличении частоты вращения ротора до высоких значений задействуется механический привод, что сделано для уменьшения размеров стабилизатора.
Патент EP3098157A1 раскрывает гироскопическое устройство для стабилизации крена морского судна, включающее в себя основание (1), сообщающееся с узлом, который содержит ротор (2), выполненный с возможностью вращения вокруг оси (6); электродвигатель (3), предназначенный для обеспечения вращения ротора вокруг указанной оси; контейнер (8) качения, поворачивающийся вокруг оси качения (7) и снабженный сообщающимся с ним ротором; первый опорный элемент (4) и второй опорный элемент (5), расположенный напротив первого опорного элемента, которые предназначены для удержания контейнера качения в требуемом положении с возможностью качения.
В результате высокая частота вращения обуславливает быстрый износ подшипников вследствие истирания и сокращение срока их службы. Следовательно, дополнительно повышать частоту вращения становится сложно, и чтобы удерживать частоту вращения на относительно низком уровне и одновременно обеспечивать достаточную гироскопическую прецессию, гироскопы должны иметь большие размеры.
Патент US3888553 раскрывает левитационное магнитное устройство, в котором ротор удерживается магнитным способом.
Патент US3845995A раскрывает вращательное магнитное устройство, содержащее статор и ротор. На роторе установлено множество постоянных магнитов, располагающихся по окружности ротора с чередующейся полярностью в окружном направлении. На статоре располагается множество обмоток, находящихся в магнитном поле, которое генерируется постоянными магнитами.
Патент US3787100A раскрывает гироскоп, включающий в себя вращающийся элемент, который опирается на пару магнитных подвесов. Каждый подвес характеризуется наличием двух детекторов, выдающих сигналы, которые отображают положение указанного элемента относительно общей оси двух подвесов в первом и втором направлениях, проходящих перпендикулярно указанной оси и друг другу.
Патент DE3310110A1 раскрывает моментный датчик для генерирования движения наклона ротора. Ротор характеризуется определенной частотой вращения и приводится в действие, например, с помощью дополнительного электродвигателя. На роторе располагаются постоянные магниты 3 и 4, которые генерируют магнитное поле, радиально направленное в воздушном зазоре, парами отдельных полюсов.
Однако технические решения указанных типов, где используются магнитные подвесы, не очень подходят для того, чтобы можно было справиться с большими крутящими моментами, возникающими в результате движений крена судна, а также для обеспечения противоположно направленного крутящего момента с целью стабилизации положения судна.
Раскрытие изобретения
Задача настоящего изобретения состоит в том, чтобы устранить проблемы предшествующего уровня техники и предложить усовершенствованный гиростабилизатор и систему гиростабилизатора.
Для достижения требуемого стабилизирующего эффекта с помощью более компактного гиростабилизатора в предпочтительном варианте большая часть массы маховика должна быть распределена по его окружности или ободу. Если частота вращения может быть увеличена, то вес и размеры маховика могут быть уменьшены, но на существующем уровне техники добиться этого сложно, например, из-за нагрузки и износа подшипников.
Изобретение, устраняющее указанные проблемы, представляет собой гиростабилизатор согласно независимым пунктам его формулы.
С помощью гиростабилизатора согласно вариантам осуществления настоящего изобретения могут быть достигнуты технические эффекты, описанные ниже.
Этот гиростабилизатор может быть более компактным в сравнении со стабилизаторами предшествующего уровня техники, поскольку частота вращения ротора может быть увеличена без износа шариковых подшипников вследствие истирания и сокращения срока их службы.
Поскольку предложенный гиростабилизатор может вращаться с более высокой частотой, диаметр ротора может быть уменьшен, и для запуска ротора требуется меньший крутящий момент.
Предложенный гиростабилизатор может обладать более высокой надежностью и энергоэффективностью, чем гиростабилизаторы предшествующего уровня техники.
Следовательно, могут быть сокращены эксплуатационные расходы.
Предложенный гиростабилизатор не содержит масло, и поэтому он более чистый и безвредный для окружающей среды, чем гиростабилизаторы с маслоотстойником.
Предложенный гиростабилизатор может выдерживать высокие кратковременные нагрузки, которые обычно имеют место в стабилизирующих системах.
Благодаря конструкции этого гиростабилизатора его легче герметизировать для работы в вакууме или газонаполненном пространстве.
Краткое описание чертежей
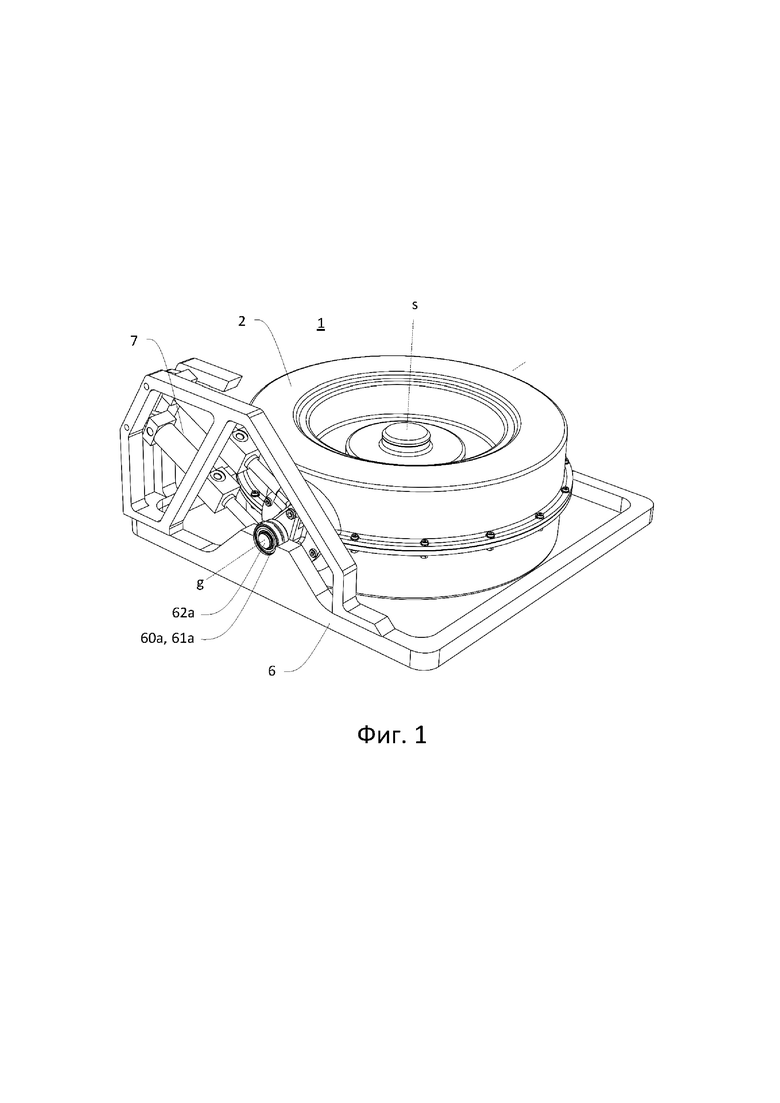
На фиг. 1 представлено перспективное изображение одного из вариантов осуществления гиростабилизатора 1 согласно настоящему изобретению.
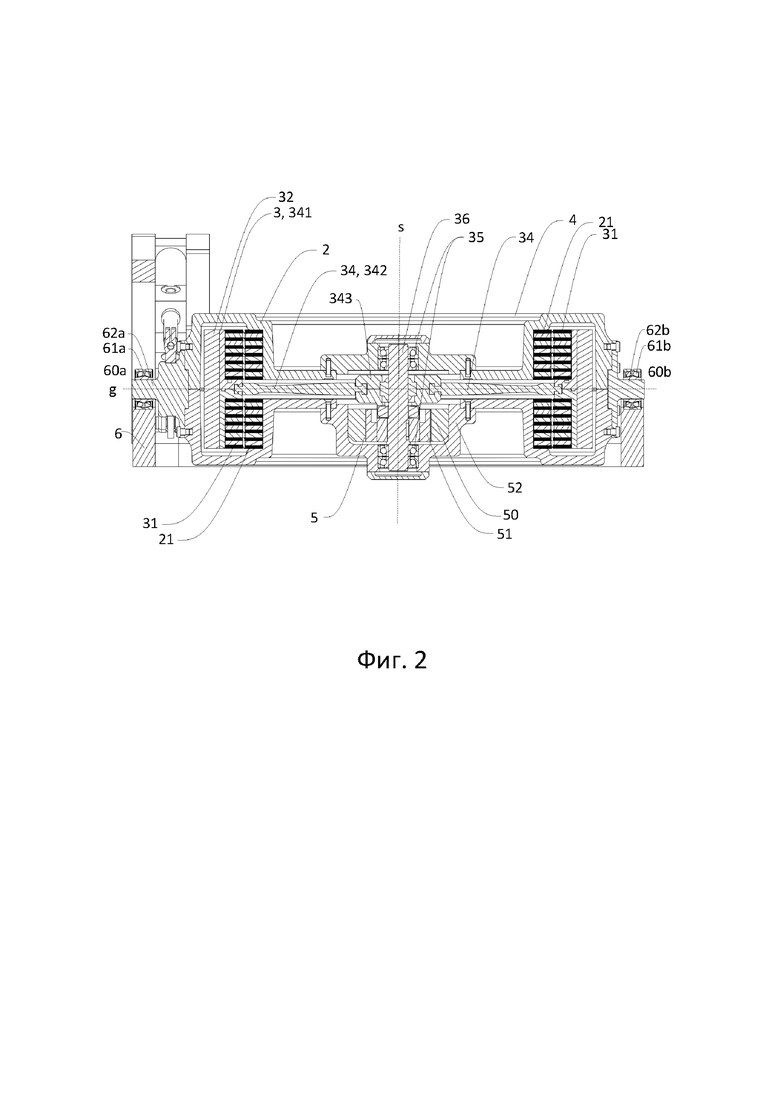
На фиг. 2 показан поперечный разрез того же варианта осуществления гиростабилизатора, что и на фиг. 1, где плоскость сечения соответствует плоскости, образованной осью (s) вращения и осью (g) карданного подвеса.
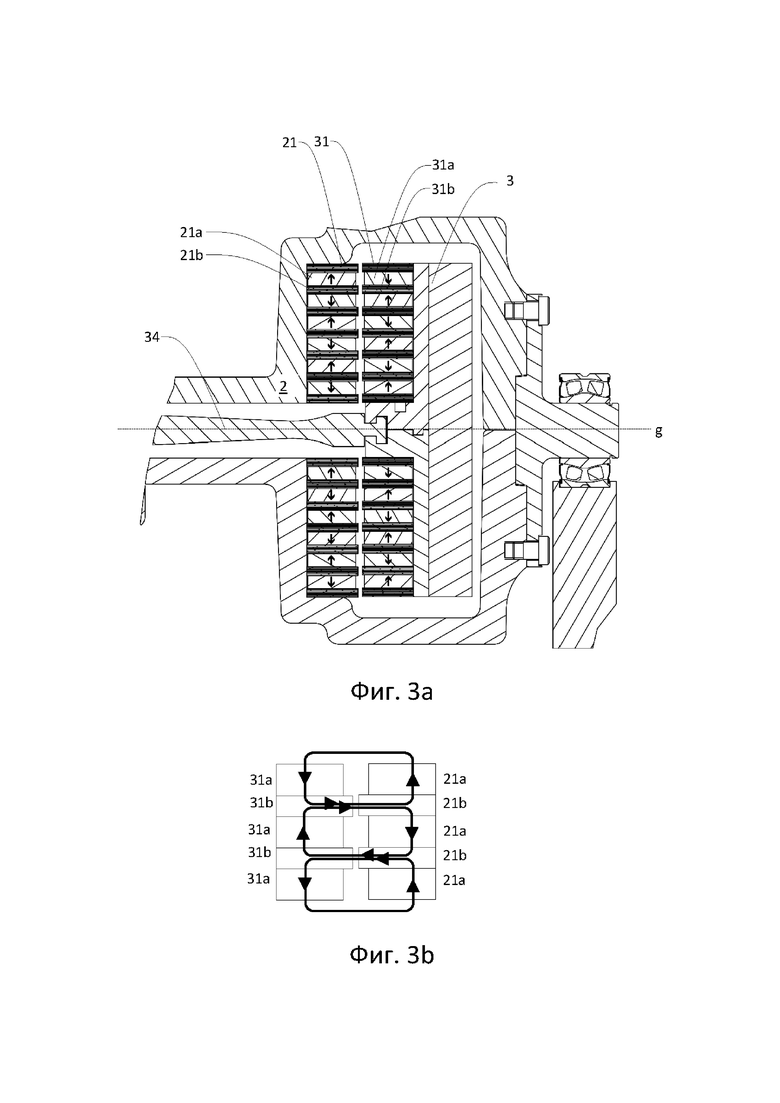
На фиг. 3a представлено более детальное изображение в поперечном разрезе статора 21 в сборе и ротора 31 в сборе, которые показаны на фиг. 2.
На фиг. 3b схематически показаны магнитные силовые линии, обусловленные конфигурацией статора и ротора (21 и 31) в сборе.
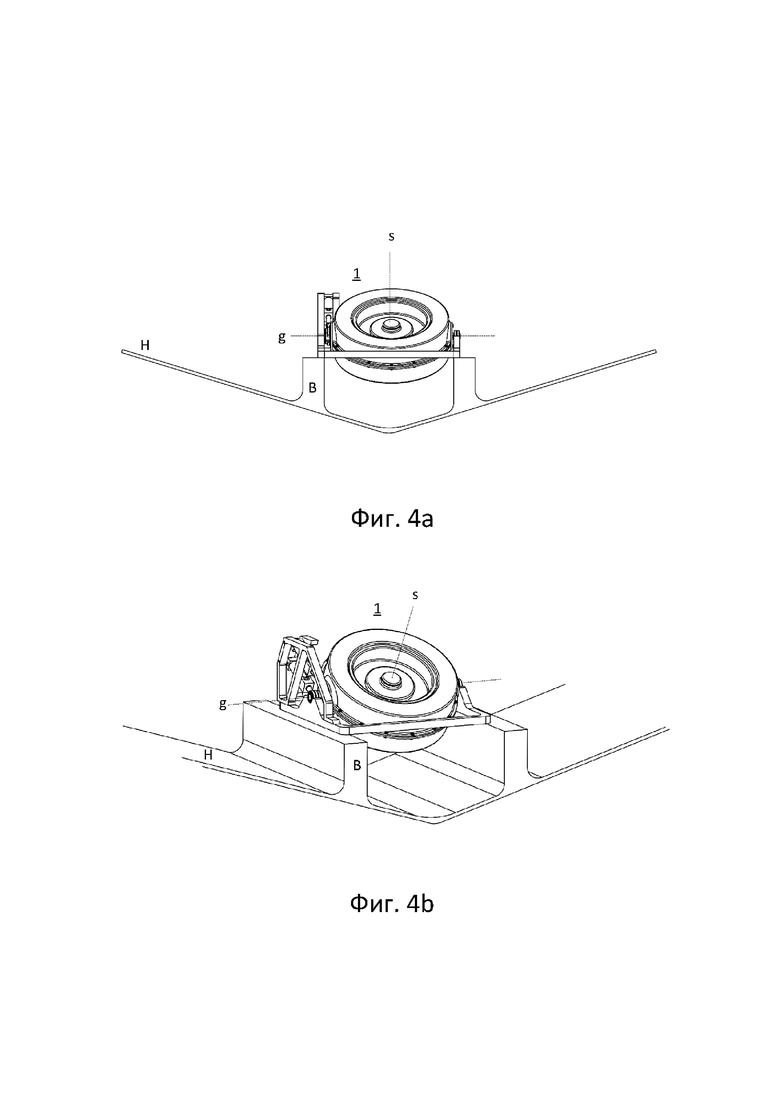
На фиг. 4a и 4b показан поперечный разрез корпуса H судна, где располагается гиростабилизатор, изображенный на фиг. 1, с рамой 6, опирающейся на укосину B или стрингер в центре корпуса.
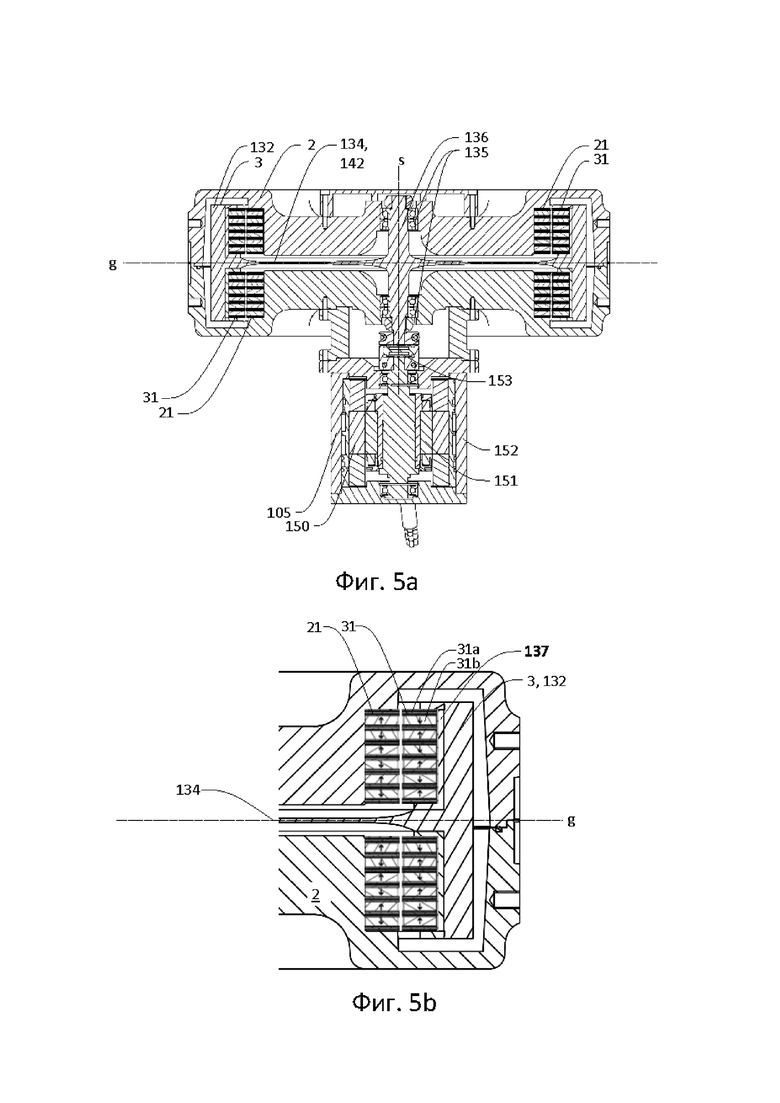
На фиг. 5a показан вид в поперечном разрезе одного из вариантов осуществления гиростабилизатора.
На фиг. 5b представлено более детальное изображение в поперечном разрезе статора 21 в сборе и ротора 31 в сборе, которые показаны на фиг. 5a.
Осуществление изобретения
В последующем описании приведены различные примеры и варианты осуществления настоящего изобретения, чтобы специалист в данной области техники могу глубже понять идею заявленного изобретения. При этом предполагается, что конкретные детали, описанные в контексте различных вариантов осуществления настоящего изобретения и в привязке к прилагаемым чертежам, не должны рассматриваться как носящие ограничительный характер. Правильнее сказать, что объем настоящего изобретения определяется прилагаемой формулой.
Варианты осуществления настоящего изобретения, описанные ниже, пронумерованы. Кроме того, также описаны зависимые или сходные варианты осуществления, относящиеся к пронумерованным вариантам осуществления. Если специально не указано иное, то любой вариант осуществления настоящего изобретения, который может быть объединен с одним или несколькими пронумерованными вариантами осуществления, может быть также напрямую объединен с любым из зависимых вариантов осуществления, относящихся к пронумерованным вариантам осуществления.
Первым вариантом осуществления настоящего изобретения предложен гиростабилизатор 1, содержащий ротор 3, выполненный с возможностью вращения вокруг оси s вращения, и статор 2, причем ротор 3 и статор 2 содержат ротор и статор (31 и 21, соответственно) в сборе. Ротор 31 в сборе располагается радиально снаружи статора 21 в сборе относительно оси s вращения, как это показано на фиг. 2, причем ротор и/или статор (31, 21) в сборе содержит элементы 31a и 21a, генерирующие магнитное поле, например, магниты, причем ротор и/или статор (31, 21) в сборе содержит, соответственно, магниты 31a и 21a ротора и/или статора.
В первом зависимом варианте осуществления настоящего изобретения магниты 31a и 21a ротора и/или статора характеризуются магнитной осью, проходящей в направлении оси вращения.
Магнитная ось представляет собой линию, соединяющую два полюса магнита.
Во втором зависимом варианте осуществления настоящего изобретения, который может быть объединен с первым зависимым вариантом осуществления, магниты 31a и 21a ротора и/или статора в сборе собраны в пакет с чередующимися направлениями магнитного поля в направлении оси s вращения.
В третьем зависимом варианте осуществления настоящего изобретения, который может быть объединен с первым или вторым зависимым вариантом осуществления, ротор 31 в сборе и/или статор 21 в сборе содержит промежуточные элементы 31b и 21b ротора и/или статора, располагающиеся между магнитами 31a и 21a, соответственно, ротора и/или статора.
В четвертом зависимом варианте осуществления настоящего изобретении, который может быть объединен с любым зависимым вариантом осуществления, указанным выше, ротор 31 в сборе и статор 21 в сборе содержат магниты, причем магниты в статоре 21 в сборе вертикально совмещены с магнитами в роторе 31 в сборе с противоположными направлениями магнитного поля и обращены в их сторону.
В пятом зависимом варианте осуществления настоящего изобретения, который может быть объединен с третьим и четвертым зависимыми вариантами осуществления, ротор 31 в сборе и статор 21 в сборе содержат промежуточные элементы 31b и 21b, причем промежуточные элементы 31b ротора вертикально совмещены с соответствующими промежуточными элементами 21b статора и обращены в их сторону.
В шестом зависимом варианте осуществления настоящего изобретения, который может быть объединен с любым из зависимых вариантов осуществления с третьего по пятый, промежуточные элементы 31b ротора расположены ближе к статору 21 в сборе, чем магниты 31a ротора.
В седьмом зависимом варианте осуществления настоящего изобретения, который может быть объединен с любым из зависимых вариантов осуществления с третьего по шестой, промежуточные элементы 21b статора расположены ближе к ротору 31 в сборе, чем магниты 21a статора.
В восьмом зависимом варианте осуществления настоящего изобретения, который может быть объединен с любым из зависимых вариантов осуществления с третьего по седьмой, каждый из промежуточных элементов 31b и 21b ротора и/или статора выполнен из ферромагнитного материала.
Статор 21 в сборе и/или ротор 31 в сборе может иметь кольцеобразную форму.
Во втором варианте осуществления настоящего изобретения, который может быть объединен с первым вариантом осуществления, статор и ротор (21 и 31) в сборе обращены друг к другу и выполнены с возможностью создания многоуровневых радиальных магнитных силовых линий, направление которых чередуется в направлении, перпендикулярном радиальному направлению.
В первом сходном варианте осуществления ротор 31 в сборе содержит многослойную структуру из элементов 31a ротора, генерирующих магнитное поле, которые разделены промежуточными элементами 31b ротора в направлении, перпендикулярном радиальному направлению.
Во втором сходном варианте осуществления, который может быть объединен с первым сходным вариантом осуществления, последующие элементы 31a ротора, генерирующие магнитное поле, характеризуются чередующимися направлениями магнитного поля, перпендикулярными радиальному направлению.
В третьем сходном варианте осуществления, который может быть объединен с первым или вторым сходным вариантом осуществления, статор 21 в сборе содержит многослойную структуру из элементов 21a статора, генерирующих магнитное поле, которые разделены промежуточными элементами 21b статора в направлении, перпендикулярном радиальному направлению, при этом последующие элементы 21a статора, генерирующие магнитное поле, характеризуются чередующимися направлениями магнитного поля, перпендикулярными радиальному направлению, причем оба набора элементов из числа обращенных друг к другу элементов 21a статора, генерирующих магнитное поле, и элементов 31a ротора, генерирующих магнитное поле, создают противоположно направленные магнитные поля, перпендикулярные радиальному направлению.
Элементами 31a ротора, генерирующими магнитное поле, могут служить постоянные магниты.
Промежуточные элементы 31b ротора могут быть выполнены из стали.
Было проведено моделирование, которое показало, что технический эффект магнитной опоры может быть достигнут с магнитами только в роторе в сборе, только в статоре в сборе, или в обоих этих компонентах в сборе. Указанный эффект значительно улучшается, если магниты предусмотрены как в статоре в сборе, так и в роторе в сборе.
В третьем варианте осуществления настоящего изобретения гиростабилизатор 1 содержит ось 36, 136 ротора и раму 34, 134 ротора, причем рама 34, 134 ротора соединяет ротор 31 в сборе с осью 36, 136 ротора и закрепляет его с возможностью последующего вращения на указанной оси.
Ось 36, 136 ротора в первом зависимом варианте осуществления настоящего изобретения опирается на подшипник 35, 135 вращения, установленный по центру статорного элемента 2 и соединяющий ось 36, 136 ротора со статорным элементом 2, обеспечивая возможность вращения роторного элемента 3 вокруг оси s вращения. Подшипник 35, 135 вращения может быть разрезан на верхнюю часть и нижнюю часть для уравновешивания каждого конца оси 36, 136 ротора, как это показано на фиг. 2 и 5a.
Во втором зависимом варианте осуществления настоящего изобретения рама 134 ротора располагается в сечении, симметричном относительно оси 36, 136 ротора.
В третьем зависимом варианте осуществления изобретения, который может быть объединен с первым или вторым вариантом осуществления, описанным выше, рама 134 ротора располагается в сечении, симметричном относительно плоскости, перпендикулярной оси 36, 136 ротора.
В четвертом варианте осуществления настоящего изобретения, который может быть объединен с любым вариантом осуществления, описанным выше, рама 34 ротора содержит трубчатое кольцо 341, расположенное снаружи ротора 31 в сборе, и радиальный элемент 342, причем радиальный элемент 342 соединен с трубчатым кольцом 341 и вращающимся подшипником 35.
В первом сходном варианте осуществления, который может быть объединен с третьим сходным вариантом осуществления, радиальный элемент 342 соединен с трубчатым кольцом 341 соосно оси g карданного подвеса.
Во втором сходном варианте осуществления, который может быть объединен с первым сходным вариантом осуществления, статор и ротор (21 и 31) в сборе разделены на верхние и нижние части, расположенные симметрично друг другу с противоположных сторон оси g карданного подвеса.
В третьем сходном варианте осуществления, который может быть объединен с первым или вторым сходным вариантом осуществления, рама 34 ротора, по меньшей мере, частично выполнена из немагнитного материала или материала с относительно низкой магнитной проницаемостью, такого как, например, латунь.
Радиальный элемент 342 может иметь дискообразную форму.
В четвертом сходном варианте осуществления, который может быть объединен с любым сходным вариантом осуществления с первого по третий, ротор 3 содержит трубчатый опорный элемент 32, расположенный радиально снаружи ротора 31 в сборе, причем трубчатый опорный элемент 32 выполнен с возможностью обеспечения опоры для ротора 31 в сборе в радиальном направлении.
Трубчатый опорный элемент 32 может быть выполнен из композиционного материала, такого как, например, углеволокно.
В пятом варианте осуществления настоящего изобретения, который может быть объединен с любым вариантом осуществления из числа третьего и четвертого вариантов осуществления и схожими с ними вариантами осуществления, гиростабилизатор 1 содержит гибкий соединительный элемент 343, расположенный между осью 36 ротора и рамой 34 ротора и выполненный с возможностью обеспечения проворачивания ротора 31 в сборе с магнитами относительно оси 36 ротора и статора 21 в сборе.
В первом сходном варианте осуществления настоящего изобретения гибкий соединительный элемент 343 выполнен с возможностью обеспечения возможности проворачивания ротора 31 в сборе с магнитами относительно оси 36 ротора и статора 21 в сборе под углом, по меньшей мере, 0,2 градуса.
Во втором сходном варианте осуществления, который может быть объединен с первым сходным вариантом осуществления, гибкий соединительный элемент 343 представляет собой гибкую кулачковую муфту, один конец которой соединен с осью 36 ротора, а другой – с рамой 34 ротора.
В шестом варианте осуществления настоящего изобретения, который может быть объединен с любым вариантом осуществления из числа первого и второго вариантов осуществления, гиростабилизатор 1 содержит цельную раму 134 ротора, причем рама 134 ротора включает в себя ось 136 ротора, радиальную опорную часть 132 и дискообразную часть 142, соединяющую между собой ось 136 ротора и радиальную опорную часть 132.
В первом сходном варианте осуществления настоящего изобретения осевая часть 136 ротора опирается на подшипник 135 вращения, установленный по центру статорного элемента 2 и соединяющий ось 136 ротора со статорным элементом 2, обеспечивая возможность вращения роторного элемента 3 вокруг оси s вращения. Подшипник 135 вращения может быть разрезан на верхнюю часть и нижнюю часть для уравновешивания каждого конца оси 136 ротора, как это показано на фиг. 5a. Подшипник 136 служит опорой для оси ротора и части ротора в радиальном направлении.
Во втором сходном варианте осуществления, который может быть объединен с первым сходным вариантом осуществления, цельная рама 134 ротора выполнена из высокопрочного материала, такого как, например, сталь. Примером используемых технологий изготовления может служить литье или ковка.
Внутри статорного элемента 2 находится статор 21 в сборе и ротор 31 в сборе, причем ротор 31 в сборе располагается радиально снаружи статора 21 в сборе.
В третьем зависимом варианте осуществления настоящего изобретения радиальная опорная часть 132 отходит от окружности дискообразной части 142 в направлении, перпендикулярном дискообразной части, образуя цилиндр.
В четвертом зависимом варианте осуществления настоящего изобретения, который зависит от третьего зависимого варианта осуществления, ротор 31 в сборе закреплен на внутренних стенках цилиндра.
В пятом зависимом варианте осуществления настоящего изобретения ротор 3 содержит кольцевую проставку 137, расположенную между ротором 31 в сборе и цилиндром. Кольцевая проставка может быть выполнена из немагнитного материала или материала с относительно низкой магнитной проницаемостью, например, из нержавеющей стали, с целью уменьшения магнитного потока в радиальной опорной части 132 ротора 3.
В шестом варианте осуществления настоящего изобретения, который может быть объединен с любым из вариантов осуществления с первого по пятый, гиростабилизатор содержит раму 6, выполненную с возможностью закрепления на судне, причем статорный элемент 2 выполнен с возможностью проворачивания вокруг оси g карданного подвеса относительно рамы 6, причем ось g карданного подвеса проходит перпендикулярно оси s вращения.
В первом сходном варианте осуществления гиростабилизатор содержит первую и вторую карданные оси 60a и 60b, шарнирно соединяющие между собой статорный элемент 2 и раму 6, причем в плоскости, перпендикулярной оси s вращения, первая и вторая карданные оси 60a и 60b располагаются снаружи роторного элемента 3 и статорного элемента 2.
Во втором сходном варианте осуществления, который может быть объединен с первым сходным вариантом осуществления, рама 6 содержит подшипники 61a и 62b карданного подвеса, выполненные с возможностью обеспечения опоры для валов 62a и 62b карданного подвеса, отходящих радиально наружу от внешнего радиуса статорного элемента 2, причем валы 62a и 62b карданного подвеса закреплены на статорном элементе 2.
В седьмом варианте осуществления настоящего изобретения, который может быть объединен с любым вариантом осуществления настоящего изобретения, описанным выше, гиростабилизатор 1 содержит вращательный двигатель 5, 105, выполненный с возможностью вращения роторного элемента 3 относительно статорного элемента 2. Вращательный двигатель 5, 105 содержит статорный элемент 50, 150 двигателя, соединенный со статорным элементом 2 с возможностью вращения, и роторный элемент 51, 151 двигателя, соединенный с роторным элементом 3 с возможностью вращения. Вращательный двигатель 5, 105 может содержать корпус 52, 152 двигателя, в который заключен вращательный двигатель 5, 105, и который выполнен с возможностью передачи тепла с вращательного двигателя 5, 105 в окружающее пространство.
Роторный элемент 51, 151 может рассеивать тепло и передавать его на ротор 3.
В первом зависимом варианте осуществления настоящего изобретения гиростабилизатор 1 содержит тормоз 7, соединяющий между собой раму 6 и статорный элемент 2.
Тормоз 7 может представлять собой активный тормоз 7, содержащий привод.
В одном из вариантов осуществления настоящего изобретения гиростабилизатор 1 содержит корпус 4, внутри которого в газонаполненном или разреженном пространстве располагается статор и ротор 21 и 31 в сборе с магнитами. Внутри этого же корпуса может также располагаться вращательный двигатель 5, 105.
Ниже будет описан один из независимых вариантов осуществления настоящего изобретения в привязке к чертежам.
На фиг. 1 представлено перспективное изображение одного из вариантов осуществления гиростабилизатора 1 согласно настоящему изобретению. Статорный элемент 2 опирается на раму 6, а невидимый роторный элемент 3 выполнен с возможностью вращения вокруг оси s вращения внутри статорного элемента 2, причем статорный элемент 2 может шарнирно поворачиваться вокруг оси g карданного подвеса для создания уравновешивающего крутящего момента в направлении, противоположном направлению движения рамы, в плоскости, образованной осью g карданного подвеса и осью s вращения. Кроме того, на фиг. 1 показана карданная ось 60a, соединяющая между собой одну из сторон статорного элемента 2 и раму 6. Карданная ось 60a содержит подшипники 61a карданного подвеса, располагающиеся в раме 6, и вал 62a карданного подвеса, отходящий радиально наружу от внешнего радиуса статорного элемента 2, причем вал 62a карданного подвеса соединен со статорным элементом 2 и опирается на подшипник 61a карданного подвеса. Для большей наглядности специально не показана скоба, охватывающая верхнюю часть карданной оси 60a и неподвижно закрепленная на раме 6. Гиростабилизатор 1 снабжен соответствующей карданной осью на противоположной стороне статорного элемента 2, которая не видна на этом чертеже. Гиростабилизатор 1 также содержит тормоз 7, располагающийся между статорным элементом 2 и рамой 6.
На фиг. 2 представлен поперечный разрез того же гиростабилизатора, что показан на фиг. 1, где плоскость сечения соответствует плоскости, образованной осью s вращения и осью g карданного подвеса. Как можно видеть, статорный элемент 2 характеризуется наличием корпуса для роторного элемента 3. В центре статорного элемента 2 располагается подшипник 35 вращения, соединяющий между собой ось 36 ротора и статорный элемент 2, а также обеспечивающий возможность вращения роторного элемента 3 вокруг оси s вращения. В этом варианте осуществления подшипник 35 вращения разрезан на верхнюю часть и нижнюю часть для уравновешивания каждого конца оси 36 ротора.
Внутри статорного элемента 2 располагается статор 21 в сборе и ротор 31 в сборе, причем ротор 31 в сборе располагается радиально снаружи статора 21 в сборе. Дополнительные детали указанных компонентов в сборе показаны на фиг. 3.
Роторный элемент 3 включает в себя раму 34 ротора, содержащую трубчатый опорный элемент 32, располагающийся радиально снаружи ротора 31 в сборе и выполненный с возможностью обеспечения опоры для ротора 31 в сборе в радиальном направлении. В этом варианте осуществления опорный элемент 32 выполнен из углеволокна.
Рама 34 ротора дополнительно содержит трубчатое кольцо 341, проходящее радиально между ротором 31 в сборе и трубчатым опорным элементом 32, и радиальный элемент 342, реализованный в виде диска, соединяющего между собой трубчатое кольцо 341 и ось 36 ротора. Между осью 36 ротора и диском 342 предусмотрен гибкий соединительный элемент 343, выполненный с возможностью обеспечения незначительного проворачивания ротора 31 в сборе с магнитами относительно оси 36 ротора и статора 21 в сборе. В данном случае гибкий соединительный элемент 343 представляет собой гибкую кулачковую муфту, один конец которой соединен с осью 36 ротора, а другой – с диском 342.
Трубчатое кольцо 341 выполнено из латуни, а радиальный элемент 342 выполнен из алюминия.
Гиростабилизатор содержит раму 6, выполненную с возможностью закрепления на судне, при этом статорный элемент 2 выполнен с возможностью шарнирного вращения вокруг оси g карданного подвеса относительно рамы 6, а ось g карданного подвеса проходит перпендикулярно оси s вращения.
Гиростабилизатор дополнительно содержит первую и вторую карданные оси 60a и 60b, шарнирно соединяющие между собой статорный элемент 2 и раму 6. Первая и вторая карданные оси 60a и 60b располагаются снаружи роторного элемента 3 и статорного элемента 2 в плоскости, перпендикулярной оси s вращения.
Рама 6 содержит подшипники 61a и 61b карданного подвеса, выполненные с возможностью обеспечения опоры для валов 62a и 62b карданного подвеса, отходящих радиально наружу от внешнего радиуса статорного элемента 2, причем валы 62a и 62b карданного подвеса закреплены на статорном элементе 2.
Вращательный двигатель 5 располагается под радиальным элементом 342, и он выполнен с возможностью вращения роторного элемента 3 вокруг оси s вращения. Вращательный двигатель 5 содержит роторный элемент 51 двигателя, соединенный с осью 36 ротора, и статорный элемент 50 двигателя, соединенный со статорным элементом 2. Вращательный двигатель 5 заключен в корпус 52 двигателя, который передает тепло с этого двигателя в окружающее пространство.
Следует отметить, что центробежная сила с вращающегося ротора 31 в сборе воспринимается, прежде всего, опорным элементом 32, а не радиальным элементом 342. Радиальный элемент 342 предназначен, главным образом, для передачи энергии вращения с вращательного двигателя 5 на ротор 31 в сборе, а также для радиального позиционирования ротора 3.
На фиг. 3a представлено более детальное изображение в поперечном разрезе статора 21 в сборе и ротора 31 в сборе, которые показаны на фиг. 2. Статор 21 в сборе содержит многослойную структуру из элементов 21a статора, генерирующих магнитное поле, и промежуточных элементов 21b статора, при этом элементы 21a статора, генерирующие магнитное поле, представляют собой постоянные магниты, а промежуточные элементы 21b статора выполнены из стали.
Ротор 31 в сборе содержит, соответственно, многослойную структуру из элементов 31a ротора, генерирующих магнитное поле, и промежуточных элементов 31b ротора, выполненных из одного и того же материала.
Как можно видеть на чертежах, промежуточные элементы 21b статора совмещены с промежуточными элементами 31b ротора, а элементы 21a статора, генерирующие магнитное поле, совмещены с элементами 31a ротора, генерирующими магнитное поле.
Направление магнитных полей генерирующих магнитное поле элементов 21a и 31a статора и ротора проиллюстрировано на чертежах в виде стрелок в направлении от южного полюса к северному полюсу. В частности, последующие элементы 21a статора, генерирующие магнитное поле, характеризуются чередующимися направлениями, перпендикулярными радиальному направлению. Это же относится к элементам 31a ротора, генерирующим магнитное поле. Кроме того, элементы 21a статора, генерирующие магнитное поле, и элементы 31a ротора, генерирующие магнитное поле, которые располагаются на одном уровне, т.е. обращенные друг к другу магнитные элементы, характеризуются противоположными магнитными полями.
На фиг. 3b схематически показаны магнитные силовые линии, обусловленные конфигурацией статора и ротора (21 и 31) в сборе. Как можно видеть, все элементы 21a и 31a статора и ротора, генерирующие магнитное поле, располагающиеся над и под промежуточными элементами 21b и 31b, способствуют созданию магнитных полей в промежуточных элементах 21b и 31b в радиальном направлении.
Как можно видеть, направление магнитных силовых линий в радиальном направлении чередуется с последующими уровнями промежуточных элементов 21b и 31b. В этом сечении, а также в других сечениях по окружности границы раздела между ротором 31 в сборе и статором 21 в сборе создаются одинаковые магнитные поля, а роторный элемент 3 стабильно удерживается в равновесном центрированном положении.
На фиг. 5a и 5b показан один из альтернативных вариантов осуществления настоящего изобретения в поперечном разрезе. Этот вариант осуществления может быть внешне похож на варианты осуществления, показанные на фиг. 1, 4a и 4b. Однако изнутри рама ротора и опора для рамы ротора отличаются от аналогичных компонентов, показанных на фиг. 2 и 3a.
Как можно видеть, статорный элемент 2 обеспечивает корпус для размещения роторного элемента 3. В центре статорного элемента 2 располагается подшипник 135 вращения, обеспечивающий возможность вращения роторного элемента 3 вокруг оси s вращения. В этом варианте осуществления настоящего изобретения подшипник 135 вращения разрезан на верхнюю часть и нижнюю часть.
Внутри статорного элемента 2 располагается статор 21 в сборе и ротор 31 в сборе, причем ротор 31 в сборе располагается радиально снаружи статора 21 в сборе. Дополнительные детали, связанные с указанными сборками, можно видеть на фиг. 5b и 3b.
Роторный элемент 3 содержит цельную раму 134 ротора. Эта цельная рама ротора содержит осевую часть 136 ротора, которая опирается на подшипник 135 вращения; радиальную опорную часть 132; и гибкую дискообразную часть 142, которая соединяет между собой осевую часть 136 ротора и радиальную опорную часть 132. Радиальная опорная часть 132 отходит от окружности диска в направлении, перпендикулярном диску, образуя при этом цилиндр, причем на внутренних стенках этого цилиндра закреплен ротор в сборе. Указанный цилиндр выполнен симметричным относительно дискообразной части.
Прецессия имеет место только в случае смещения ротора 31 относительно статора 21 в сборе. Согласно этому варианту осуществления настоящего изобретения цельная рама ротора выполнена гибкой, что позволяет радиальной опорной части 132 смещаться перпендикулярно относительно осевой части 136 ротора.
Таким образом, жесткость дискообразной части 142 достаточно высока, чтобы удерживать ротор 132 в сборе в состоянии надлежащего совмещения со статором 121 в сборе, вне зависимости от того, находится ли ротор в состоянии покоя или вращается на максимальных оборотах, когда на статор в сборе не действует какой-либо момент внешних сил, но при этом она достаточно мала, чтобы ротор в сборе мог слегка проворачиваться относительно статора в сборе при вращении ротора, и когда на статор в сборе действует момент внешних сил, такой как движение крена судна.
Максимальное относительное смещение ротора в сборе относительно статора в сборе может быть ограничено, например, доступным физическим пространством или разделением магнитных силовых линий.
В этом варианте осуществления настоящего изобретения цельная рама ротора изготовлена из кованой стали.
В этом варианте осуществления настоящего изобретения вращательный двигатель 105 сконфигурирован таким образом, что его ось соединена с осью 136 ротора посредством гибкой муфты 136. Вращательный двигатель 105 располагается под цельной рамой 134 ротора и выполнен с возможностью обеспечения вращения роторного элемента 3 вокруг оси s вращения. Вращательный двигатель105 содержит ротор 151 двигателя, соединенный с осью 136 ротора, и статор 150 двигателя, соединенный со статорным элементом 2. Корпус 152 двигателя заключает в себе вращательный двигатель 5 и передает тепло с двигателя в окружающую среду.
Вращательный двигатель в этом варианте осуществления может быть заменен другими вращательными двигателями, например, в которых ось двигателя объединена с осью 136 ротора и располагается внутри корпуса так же, как это показано на фиг. 2.
На фиг. 5a специально не показано, как гиростабилизатор устанавливается на раме, но гиростабилизатор содержит раму, выполненную с возможностью закрепления на судне, причем статорный элемент 2 выполнен с возможностью шарнирного вращения вокруг оси g карданного подвеса относительно этой рамы, и при этом ось g карданного подвеса проходит перпендикулярно оси s вращения. Рама с сопутствующими компонентами может быть идентична раме, проиллюстрированной на фиг. 2. В этом случае вращательный двигатель 105 может располагаться над цельной рамой 134 ротора, или же он может быть интегрирован так, как это показано на фиг. 2.
В примерах осуществления настоящего изобретения различные признаки и детали проиллюстрированы в комбинациях. Тот факт, что некоторые признаки описаны в привязке к конкретному примеру, не должен рассматриваться как означающий, что все эти признаки обязательно должны быть включены во все варианты осуществления настоящего изобретения. И наоборот, признаки, которые описаны в привязке к разным вариантам осуществления заявленного изобретения, не должны рассматриваться как взаимно исключающие. Специалистам в данной области техники должно быть абсолютно понятно, что автором изобретения предполагаются варианты осуществления заявленного изобретения, которые включают в себя любой из наборов признаков, описанных в настоящем документе, и которые не являются явно взаимозависимыми, и при этом они являются неотъемлемой частью заявленного изобретения. Однако подробное описание всех таких вариантов осуществления не облегчило бы понимание принципов настоящего изобретения, и поэтому для упрощения или краткости изложения некоторые комбинации признаков были опущены.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИГАТЕЛЬ, СТРУКТУРА РОТОРА И МАГНИТНАЯ МАШИНА | 2008 |
|
RU2435282C2 |
| МАГНИТНАЯ ДВИГАТЕЛЬНАЯ И ЭЛЕКТРОГЕНЕРИРУЮЩАЯ СИСТЕМА | 2017 |
|
RU2730965C1 |
| ИНДУКТОРНОЕ СИНХРОННОЕ УСТРОЙСТВО | 2005 |
|
RU2361350C2 |
| БЕСЩЕТОЧНЫЙ ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА С ТОРМОЖЕНИЕМ В ОБЕСТОЧЕННОМ СОСТОЯНИИ | 2010 |
|
RU2521958C2 |
| УСТРОЙСТВО ДЛЯ УРАВНОВЕШИВАНИЯ ПОРШНЕВОЙ МАШИНЫ | 1992 |
|
RU2018039C1 |
| ВЕТРОВАЯ СИСТЕМА ГЕНЕРИРОВАНИЯ ЭЛЕКТРОЭНЕРГИИ, СИСТЕМА ПОСТОЯННЫХ МАГНИТОВ И ПРЕОБРАЗОВАТЕЛЬ ЭЛЕКТРОЭНЕРГИИ В МЕХАНИЧЕСКУЮ СИЛУ | 2004 |
|
RU2383778C2 |
| СОПЛОВОЙ АППАРАТ ТУРБИНЫ | 2016 |
|
RU2708931C1 |
| НАСОС ВСПОМОГАТЕЛЬНОГО КРОВООБРАЩЕНИЯ С ТОРЦЕВЫМ ДВИГАТЕЛЕМ | 2020 |
|
RU2744482C1 |
| ГИРОСТАБИЛИЗАТОР | 1978 |
|
SU1840380A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ И МОТОР-РЕДУКТОР | 2013 |
|
RU2554931C2 |
Изобретение относится к устройствам для уменьшения килевой и бортовой качки водных транспортных средств. Гиростабилизатор содержит ротор, выполненный с возможностью вращения вокруг оси вращения, и статор. При этом ротор и статор содержат, соответственно, ротор в сборе и статор в сборе. При этом ротор в сборе располагается радиально снаружи статора в сборе относительно оси вращения. Причем ротор и/или статор в сборе содержит магниты с магнитной осью, проходящей в направлении оси вращения. Причем магниты ротора и/или статора в сборе собраны в пакет с чередующимися направлениями магнитного поля в направлении оси вращения. Технический результат заключается в повышении надежности и уменьшении веса и размера маховика. 20 з.п. ф-лы, 8 ил.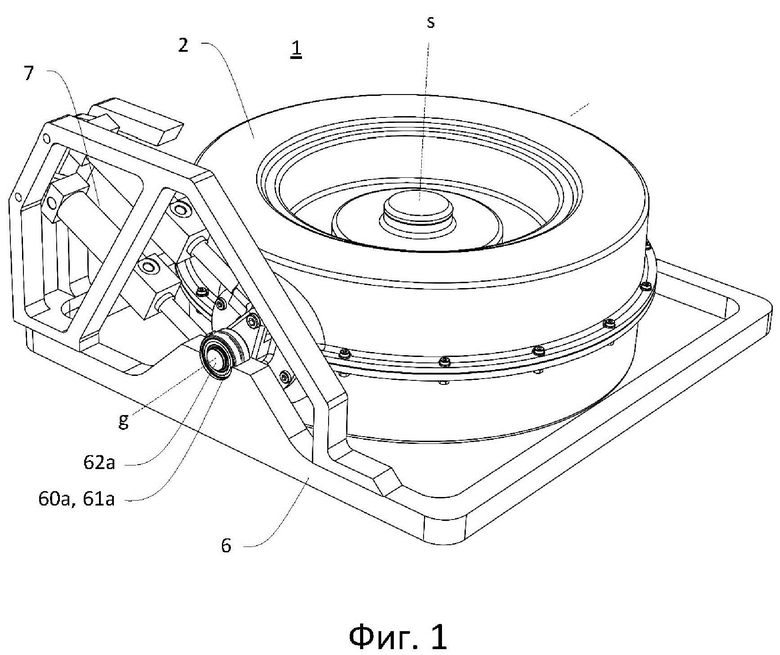
1. Гиростабилизатор (1), содержащий:
ротор (3), выполненный с возможностью вращения вокруг оси (s) вращения; и
статор (2), при этом:
ротор (3) и статор (2) содержат, соответственно, ротор (31) в сборе и статор (21) в сборе;
при этом ротор (31) в сборе располагается радиально снаружи статора (21) в сборе относительно оси (s) вращения, причем ротор и/или статор (31, 21) в сборе содержит магниты с магнитной осью, проходящей в направлении оси (s) вращения, причем магниты (31a, 21a) ротора и/или статора в сборе собраны в пакет с чередующимися направлениями магнитного поля в направлении оси (s) вращения.
2. Гиростабилизатор по п. 1, в котором статор и/или ротор в (21, 31) сборе содержит промежуточные элементы (31b, 21b) ротора и/или статора, располагающиеся между магнитами (31a, 21a) ротора и/или статора, соответственно.
3. Гиростабилизатор по п. 1 или 2, в котором каждый компонент в сборе из числа ротора (31) в сборе и статора (21) в сборе содержит магниты, причем магниты в статоре (21) в сборе совмещены с магнитами в роторе (31) в сборе и обращены в сторону магнитов в роторе (31) в сборе с противоположными направлениями магнитного поля в направлении оси (s) вращения.
4. Гиростабилизатор по п. 2 или 3, в котором каждый компонент в сборе из числа ротора (31) в сборе и статора (21) в сборе содержит промежуточные элементы (31b, 21b), причем промежуточные элементы (31b) ротора совмещены с соответствующими промежуточными элементами (21b) статора в направлении оси (s) вращения и обращены в их сторону.
5. Гиростабилизатор по любому из пп. 2-4, в котором промежуточные элементы (31b) ротора расположены ближе к статору (21) в сборе, чем магниты (31a) ротора.
6. Гиростабилизатор по любому из пп. 2-5, в котором все промежуточные элементы (31b, 21b) ротора и/или статора выполнены из ферромагнитного материала.
7. Гиростабилизатор по любому из пп. 1-6, в котором статор и ротор (21, 31) в сборе обращены друг к другу и выполнены с возможностью создания многоуровневых радиальных магнитных силовых линий с чередующимися направлениями в направлении, перпендикулярном радиальному направлению.
8. Гиростабилизатор по п. 7, в котором ротор (31) в сборе содержит многослойную структуру из элементов (31a) ротора, генерирующих магнитное поле, которые разделены промежуточными элементами (31b) ротора в направлении, перпендикулярном радиальному направлению.
9. Гиростабилизатор по п. 8, в котором последующие элементы (31a) ротора, генерирующие магнитное поле, характеризуются чередующимися направлениями магнитного поля, перпендикулярными радиальному направлению.
10. Гиростабилизатор по п. 8 или 9, в котором статор (21) в сборе содержит многослойную структуру из элементов (21a) статора, генерирующих магнитное поле, которые разделены промежуточными элементами (21b) статора в направлении, перпендикулярном радиальному направлению, при этом последующие элементы (21a) статора, генерирующие магнитное поле, характеризуются чередующимися направлениями магнитного поля, перпендикулярными радиальному направлению, причем оба набора элементов из числа обращенных друг к другу элементов (21a) статора, генерирующих магнитное поле, и элементов (31a) ротора, генерирующих магнитное поле, создают противоположно направленные магнитные поля, перпендикулярные радиальному направлению.
11. Гиростабилизатор по любому из пп. 8-10, в котором элементами (31a) ротора, генерирующими магнитное поле, служат постоянные магниты.
12. Гиростабилизатор по любому из пп. 8-10, в котором промежуточные элементы (31b) ротора выполнены из стали.
13. Гиростабилизатор по любому из пп. 1-12, содержащий ось (36, 136) ротора и раму (34, 134) ротора, причем рама (34, 134) ротора прикрепляет ротор (31) в сборе к оси (36, 136) ротора и соединяет их между собой с возможностью вращения.
14. Гиростабилизатор по любому из пп. 1-13, в котором рама (34) ротора содержит трубчатый опорный элемент (32), выполненный из углеволокна и располагающийся радиально снаружи ротора (31) в сборе, причем трубчатый опорный элемент (32) выполнен с возможностью обеспечения опоры для ротора (31) в сборе в радиальном направлении.
15. Гиростабилизатор по п. 13 или 14, содержащий гибкий соединительный элемент (343), расположенный между осью (36) ротора и рамой (34) ротора и выполненный с возможностью обеспечения проворачивания ротора (31) в сборе с магнитами относительно оси (36) и статора (21) в сборе.
16. Гиростабилизатор по п. 13, содержащий цельную раму (134) ротора, причем рама (134) ротора содержит осевую часть (136) ротора, радиальную опорную часть (132) и дискообразную часть (142), соединяющую между собой осевую часть (136) ротора и радиальную опорную часть (132).
17. Гиростабилизатор по п. 16, в котором осевая часть (136) ротора в первом сходном варианте осуществления опирается на подшипник (135) вращения, закрепленный по центру статорного элемента (2) и соединяющий между собой ось (136) ротора и статорный элемент (2) обеспечивая возможность вращения роторного элемента (3) вокруг оси (s) вращения.
18. Гиростабилизатор по п. 16 или 17, в котором цельная рама (134) ротора выполнена из литой или кованой стали.
19. Гиростабилизатор по любому из пп. 16-18, в котором радиальная опорная часть (132) отходит от окружности дискообразной части (142) в направлении, перпендикулярном дискообразной части, образуя цилиндр.
20. Гиростабилизатор по п. 19, в котором ротор (31) в сборе закреплен на внутренних стенках цилиндра.
21. Гиростабилизатор по п. 19, в котором ротор (3) содержит кольцевую проставку (137), расположенную между ротором (31) в сборе и цилиндром.
| US 3845995 A, 05.11.1974 | |||
| US 3787100 A, 22.01.1974 | |||
| US 2005274210 A1, 15.12.2005 | |||
| EP 3098157 A1, 30.11.2016 | |||
| ГИРОСКОП | 2001 |
|
RU2210733C2 |
