Группа изобретений относится к оборудованию для контроля рабочих параметров при бурении и может быть использована для ремонта средств передачи сигналов измерения из скважины на поверхность в процессе бурения как в горизонтально, так и в вертикально направленных скважинах, а также в наклонно-направленных и разветвленно-горизонтальных скважинах в процессе бурения.
Известно, что электронный зонд, установленный в буровой головке установки горизонтально направленного бурения (ГНБ), используется для определения положения буровой головки в грунте и передачи этой информации на прибор оператора установки ГНБ для последующей коррекции параметров бурения.
Возможность определения положения буровой головки в грунте обусловлена однозначным и фиксированным положением зонда внутри буровой головки. Блок датчиков пространственного ориентации, закрепленный в зонде, вырабатывает сигналы, которые несут в себе информацию о пространственном положении зонда и, как следствие, буровой головки.
В электронном зонде сигналы блока датчиков с высокой точностью передают информацию на блок преобразователя, который формирует кодированное переменное магнитное поле вокруг зонда. Код этого магнитного поля содержит, в том числе, преобразованную информацию от блока датчиков пространственной ориентации. Магнитное поле с кодом улавливается на поверхности грунта специальным прибором-приемником, который ретранслирует информацию о пространственном положении зонда на прибор оператора установки ГНБ для последующего отображения данных на дисплее.
Для достижения высокой точности отображения параметров пространственной ориентации зонда на дисплее приемника в блоке преобразователя зонда, выполненном, как правило, на основе микроконтроллеров, используется система поправочных коэффициентов, записываемых в долговременную память микроконтроллеров или вспомогательных микросхем долговременной памяти и компенсирующих ошибки блока датчиков пространственной ориентации. Необходимая величина каждого поправочного коэффициента определяется в процессе юстировки каждого зонда и записывается в энергонезависимую память. В частности, путем введения поправочных коэффициентов совмещают продольную ось блока датчиков пространственной ориентации (значение, отображаемое на дисплее приемника) и продольную ось зонда (истинный наклон зонда по отношению к горизонту).
Известны зонды для установок ГНБ (торговое обозначение DX, DT, DFT, ЕТ, EDF, ST, FX, 5Х фирмы DIGITAL CONTROL INC., США, торговое обозначение 86В. 86ВН, 86BD фирмы Machine Works Inc., США), которые представляют собой неразборные герметичные устройства, прошедшие все необходимые котировочные процедуры в заводских условиях.
Ремонт электронных зондов представляет собой сложный процесс, заключающийся во вскрытии электронной платы, ее восстановительного ремонта и финишной герметизации зонда для получения его физических характеристик в соответствии с исходными «фирменными» требованиями.
Поправочные коэффициенты для юстировки параметров зонда, определяемые заводской настройкой, находятся в энергонезависимой памяти блока преобразователя данных. В процессе ремонта условия заводской настройки нарушаются вследствие изменения механического положения блока датчиков пространственного ориентации зонда и/или его замены.
В связи с закрытым характером программного обеспечения «фирменных» зондов все котировочные процедуры в процессе восстановительного ремонта невозможно проводить без использования дополнительных элементов.
Найти информацию, где детально описывался бы процесс ремонта электронных зондов, заявителю не удалось.
Известна лишь рекламная информация по сервисному обслуживанию и ремонту бурового оборудования, представленная в статье «Поддержка и сервисное обслуживание локаторов Ditch Witch SubSite 750KR и 752TKR» на сайте www.ditchwitch.ru/service/repair.html. (см. Приложение к заявке) и выбранная в качестве прототипа.
В данной статье (а точнее, рекламной информации) указаны следующие возможные виды ремонта:
- частичная или полная замена корпусных деталей;
- замена или ремонт электронных компонентов локатора, дисплея;
- поверка локатора;
- добавление функции трассоискателя 50 Гц в американских локаторах 752TKR;
- модернизация до двухчастотного локатора, т.е. добавление частоты 12 кГц;
- модернизация локаторов без передатчика и установка антенного блока для возможности работы с дисплеем 750D;
- обновление программного обеспечения, позволяющее использовать все функции устройства.
Далее указано, что специалисты фирмы обеспечивают вышеназванный ремонт локаторов, дисплеев, а также зондов, трассоискателей, компьютеров с указанием их типов.
Наиболее близким по технической сущности к заявляемому является в данном случае возможный ремонт зонда путем замены электронных компонентов зонда с последующей его поверкой, упомянутые в вышеназванном Приложении к заявке. Электронными компонентами зонда являются блок датчиков и связанный с ним блок преобразователя сигналов с блока датчиков.
Недостатком известных средств является сложность электронной «стыковки» замененного блока датчиков с блоком преобразователя сигналов и возможное снижение точности измерений за счет нарушения заводской настройки.
Задачей является повышение надежности и точности работы зонда после ремонта при его последующей работе за счет обеспечения возможности согласования замененного блока датчиков с блоком преобразователя сигналов.
Поставленная задача решается тем, что:
- в способе восстановительного ремонта электронного зонда буровой установки горизонтально направленного бурения, включающем замену блока датчиков пространственного положения зонда, согласованного в заводских условиях с блоком преобразователя посредством поправочных коэффициентов, записанных в энергонезависимой памяти зонда, СОГЛАСНО ИЗОБРЕТЕНИЮ, после замены блока датчиков пространственного положения зонда производят согласование выходов нового блока датчиков с входами блока преобразователя для восстановления заданных настроек путем реализации с помощью введенного в зонд блока сопряжения с реализацией функции А=K×А’+S(A’), где А - набор данных по трем пространственным координатам, необходимый для корректного отображения положения зонда на дисплее приемника, А’ - тот же набор данных по трем пространственным координатам, но генерируемый новым блоком датчиков пространственного положения зонда, K - коэффициент передачи, подбираемый в процессе юстировки параметров зонда, S(A’) - матрица коэффициентов сдвига, формируемая в процессе юстировки параметров зонда;
- в восстановленный электронный зонд буровой установки горизонтально направленного бурения, включающий замененный блок датчиков пространственной ориентации и связанный с ним блок преобразователя сигналов с блока датчиков, СОГЛАСНО ИЗОБРЕТЕНИЮ, введен дополнительно блок сопряжения, содержащий набор механических и электронных аналоговых и/или цифровых элементов в виде устройства памяти для хранения коэффициентов передачи, подбираемых в процессе юстировки параметров зонда, вход которого связан с выходом замененного блока датчиков, связанным также с входом матрицы коэффициентов сдвига, формируемой в процессе юстировки параметров зонда, а выходы устройства памяти и матрицы связаны с входами сумматора, выход которого является входом для блока преобразователя данных зонда.
В заявляемом способе восстановительного ремонта электронного зонда буровой установки выполнение в отремонтированном зонде согласования выходов нового блока датчиков с входами блока преобразователя для восстановления заданных настроек параметров А при реализации вышеуказанной функции введенным в зонд блоком сопряжения А=К×А’+S(A’) посредством юстировки параметров А' нового блока датчиков с помощью подбираемых в процессе юстировки коэффициентов К и формируемой при этом матрицы S(A’) коэффициентов сдвига обеспечивает дальнейшую надежную работу отремонтированного зонда с хорошей точностью измерения параметров пространственного положения буровой головки.
В восстановленном таким способом электронном зонде с замененным блоком датчиков пространственного положения введение дополнительного блока сопряжения, содержащего набор механических и электронных аналоговых и/или цифровых элементов в виде устройства памяти для хранения коэффициентов передачи, подбираемых в процессе юстировки параметров зонда, вход которого связан с выходом нового блока датчиков, связанным также с входом матрицы коэффициентов сдвига, формируемой в процессе юстировки параметров зонда, а выходы устройства памяти и матрицы связаны с входами сумматора, выход которого является входом для блока преобразователя данных зонда, дает возможность обеспечить подбором параметров этих элементов согласование выходов нового блока датчиков с входами блока преобразователя для восстановления заданных заводских настроек и дальнейшую надежную работу этого зонда с хорошей точностью измерений.
Образно говоря, заявляемый способ можно сравнить с использованием человеком очков. Раньше зрение было хорошим, но со временем (эксплуатацией) зрение ухудшилось. Глаза или мозг откорректировать невозможно без особых знаний, которыми мы не владеем. Данные от датчиков (окружающих объектов) мы корректируем (юстируем) с помощью очков.
Способ коррекции данных с помощью дополнительных элементов, устанавливаемых в потоке данных и которые можно назвать преобразователями, универсален, но никогда не упоминался применительно к процедуре восстановительного ремонта зондов для установок ГНБ.
Технический результат - обеспечение согласования замененного блока датчиков с преобразователем сигналов для надежной и точной работы отремонтированного таким способом электронного зонда буровой головки.
Заявляемый способ обладает новизной в сравнении с прототипом, отличаясь от него наличием таких существенных признаков, как согласование выходов нового блока датчиков с входами блока преобразователя для восстановления заданных настроек путем реализации с помощью введенного после замены блока датчиков в зонд дополнительного блока сопряжения, содержащего набор механических и электронных аналоговых и/или цифровых элементов, подбором параметров упомянутых элементов, обеспечивающих согласование выходов нового блока датчиков с входами блока преобразователя для восстановления заданных настроек, путем реализации функции А= K×А’+S(A’), где А - набор данных по трем пространственным координатам, необходимый для корректного отображения положения зонда на дисплее приемника, А’ - тот же набор данных по трем пространственным координатам, но генерируемый новым блоком датчиков пространственного положения зонда, K - коэффициент передачи, подбираемый в процессе юстировки параметров зонда, S(A’) - матрица коэффициентов сдвига, формируемая в процессе юстировки параметров зонда, обеспечивающими в совокупности достижение заданного результата.
Заявляемый восстановленный таким способом электронный зонд также обладает новизной в сравнении с прототипом, отличаясь от него наличием в нем дополнительного блока сопряжения, соединенного входом с выходом блока датчиков, а выходом - с входом блока преобразования сигналов и содержащего набор механических и электронных аналоговых и/или цифровых элементов в виде устройства памяти для хранения коэффициентов передачи, подбираемых в процессе юстировки параметров зонда, вход которого связан с выходом нового блока датчиков, связанным также с входом матрицы коэффициентов сдвига, формируемой в процессе юстировки параметров зонда, а выходы устройства памяти и матрицы связаны с входами сумматора, выход которого является входом для блока преобразователя данных зонда, позволяющими в совокупности достичь заданного результата.
Заявителю неизвестны такие средства восстановительного ремонта электронных зондов буровых установок горизонтально направленного бурения, как описанные выше, обладающие указанными отличительными признаками, позволяющими в совокупности получить надежное согласование замененного блока датчиков пространственного положения зонда с блоком преобразователя сигналов, обеспечивающими фактически восстановление заводских настроек и гарантирующими в дальнейшем его надежную и точную работу, поэтому он считает, что заявляемые технические решения соответствуют критерию «изобретательский уровень».
Заявляемый способ восстановительного ремонта электронного зонда буровой установки горизонтально направленного бурения и восстановленный таким способом зонд могут найти широкое применение в буровом оборудовании, особенно в настоящее время, когда остро стоит проблема импортозамещения, и потому соответствуют критерию «промышленная применимость».
Изобретения иллюстрируются чертежами, где представлены на:
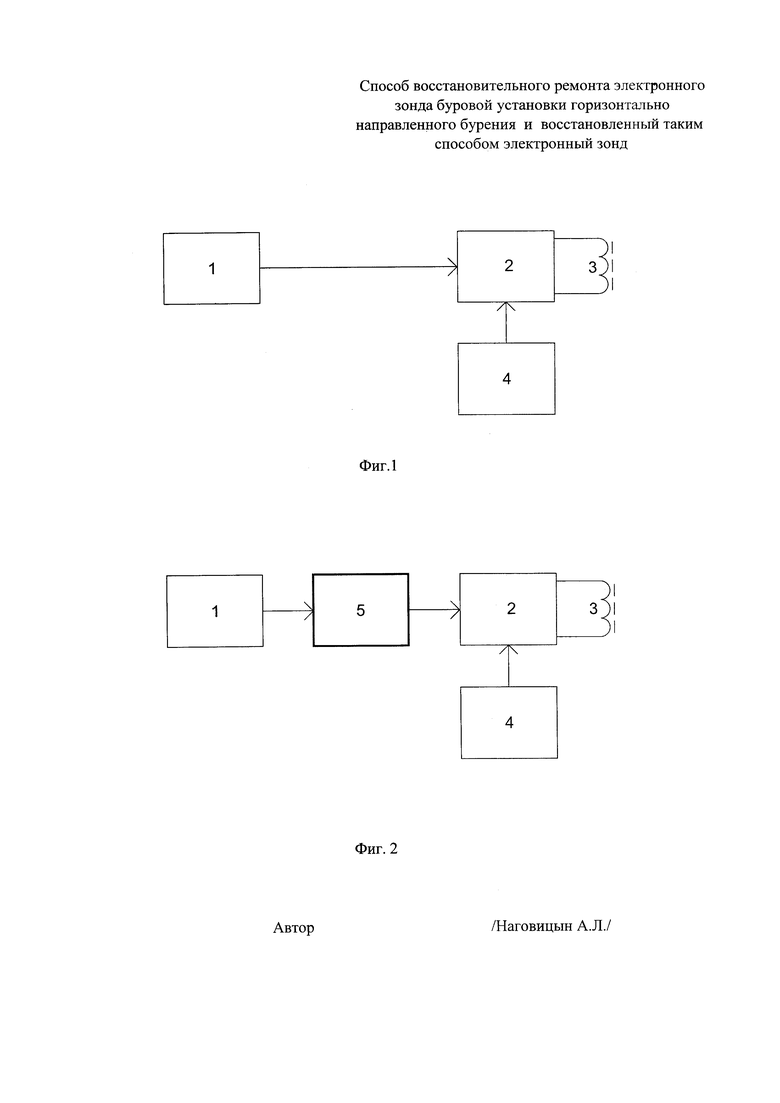
- фиг. 1 - блок-схема обычного электронного зонда буровой установки;
- фиг. 2 - блок-схема восстановленного электронного зонда после ремонта его заявляемым способом;
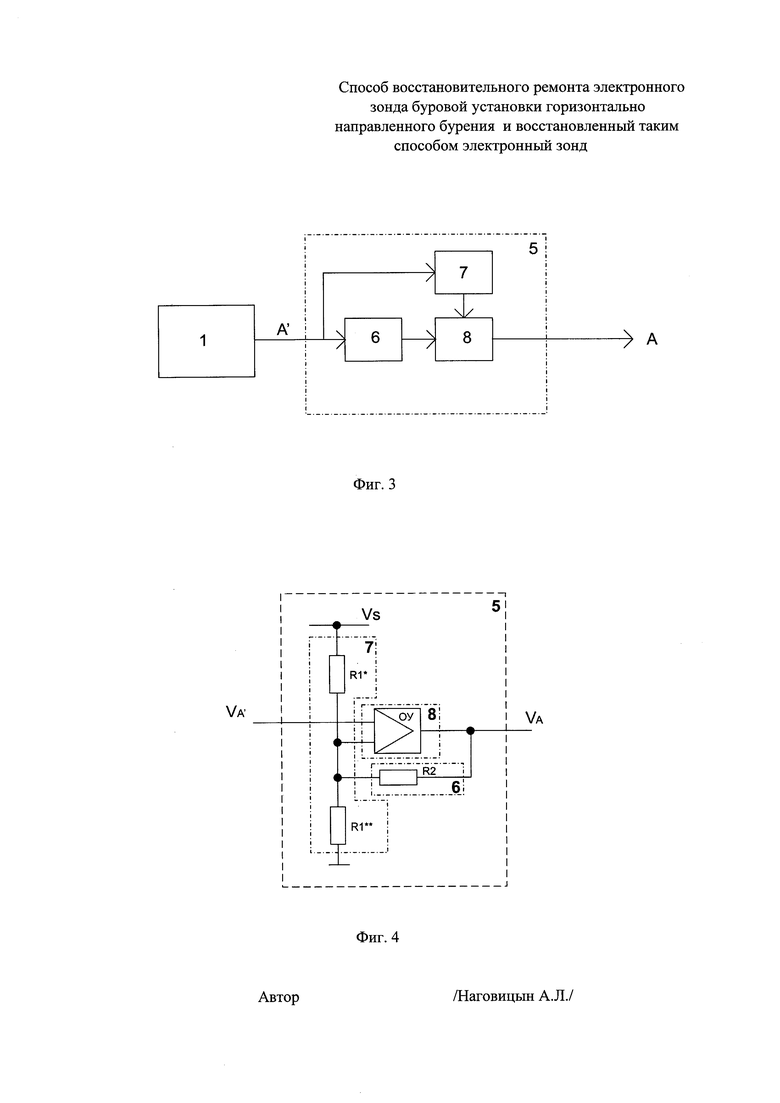
- фиг. 3 - функциональная схема блока сопряжения;
- фиг. 4 - пример реализации принципиальной схемы аналогового блока сопряжения для устранения систематической ошибки показаний дисплея для продольного наклона зонда;
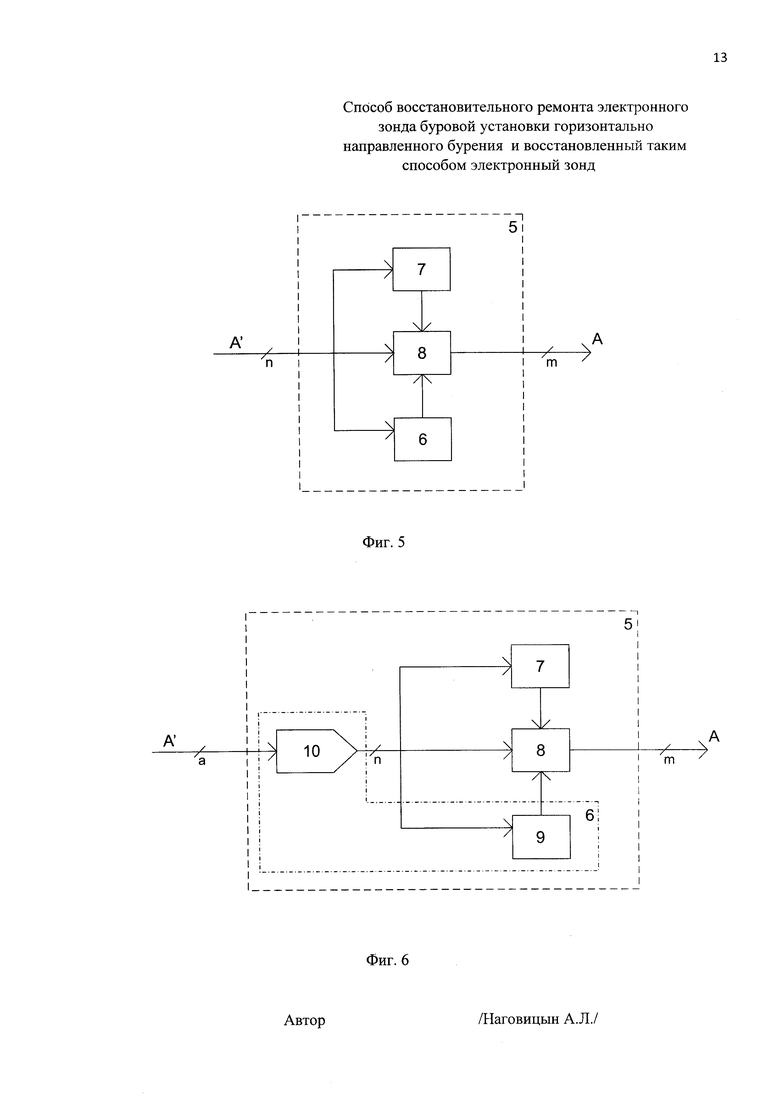
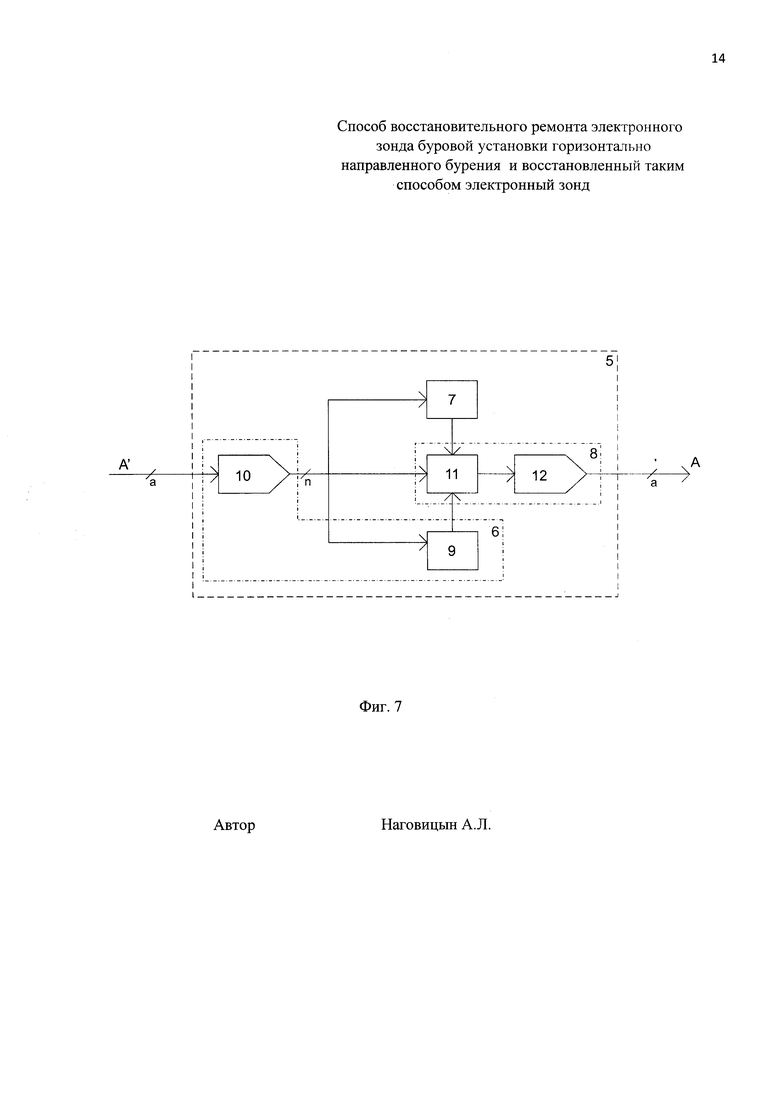
- фиг. 5 - фиг. 7 - примеры реализации функциональной схемы цифрового блока сопряжения, выполненного, например, на базе микроконтроллера, для устранения систематической ошибки показаний дисплея для текущего положения зонда.
Поскольку во взятой за прототип информации не приведено никаких схем, то заявитель, уже несколько лет успешно занимающийся на практике ремонтом электронных зондов буровых установок для горизонтально направленного бурения (ГНБ), приводит в данном описании блок-схему обычного электронного зонда до его ремонта (фиг. 1).
Блок-схема любого электронного зонда буровой установки ГНБ, приведенная на фиг. 1, содержит последовательно соединенные между собой блок 1 датчиков пространственной ориентации, блок 2 преобразователя данных, магнитную антенну 3 и связанный с блоком 2 блок 4 питания.
Поправочные коэффициенты для юстировки параметров зонда, определяемые заводской настройкой, находятся в энергонезависимой памяти (на чертежах не показана) блока 2 преобразователя данных. В процессе ремонта условия заводской настройки нарушаются вследствие изменения механического положения блока датчиков пространственного ориентации зонда и/или его замены.
Заявляемый способ восстановительного ремонта электронного зонда буровой установки горизонтально направленного бурения заключается в том, что после замены блока датчиков пространственного положения зонда производят согласование выходов нового блока датчиков с входами блока преобразователя для восстановления заданных настроек путем реализации с помощью введенного в зонд блока сопряжения функции А=К×А’+S(A’). При этом А - набор данных по трем пространственным координатам, необходимый для корректного отображения положения зонда на дисплее приемника, А’ - тот же набор данных по трем пространственным координатам, но генерируемый новым блоком датчиков пространственного положения зонда, К - коэффициент передачи, подбираемый в процессе юстировки параметров зонда, S(A’) - матрица коэффициентов сдвига, формируемая в процессе юстировки параметров зонда.
Заявляемый восстановленный таким способом электронный зонд буровой установки (фиг. 2) включает в себя замененный блок 1' датчиков пространственной ориентации, соединенный с его выходом блок 5 сопряжения и подключенный входом к выходу блока 5 блок 2 преобразователя сигналов с блока 1 датчиков.
Для всех вариантов выполнения блока 5 сопряжения использованы следующие обозначения: 6 - набор элементов, в том числе, например, матрица коэффициентов передачи в энергонезависимой памяти микроконтроллера, для юстирования коэффициента передачи блока сопряжения, 7 - набор элементов, в том числе, например, матрица коэффициентов сдвига в энергонезависимой памяти микроконтроллера, для компенсации систематической ошибки (сдвига) коэффициента передачи блока сопряжения, 8 - суммирующее устройство, выполненное на базе, например, операционного усилителя или арифметическо-логического устройства микроконтроллера, 9 - матрица корректирующих значений коэффициента передачи в энергонезависимой цифровой памяти, 10 - аналого-цифровой преобразователь, 11 - арифметическо-логическое устройство, 12 - цифроаналоговый преобразователь, а - аналоговый интерфейс, n - цифровой интерфейс разрядности n, m - цифровой интерфейс разрядности m.
При этом блок 5 сопряжения (фиг. 3) содержит набор механических и электронных аналоговых и/или цифровых элементов в виде устройства 6 памяти для хранения коэффициентов передачи, подбираемых в процессе юстировки параметров зонда, вход которого связан с выходом нового блока 1' датчиков, связанным также с входом матрицы 7 коэффициентов сдвига, формируемой в процессе юстировки параметров зонда, а выходы устройства 6 памяти и матрицы 7 связаны с входами сумматора 8, выход которого является входом для блока 2 преобразователя данных зонда.
Блок 5 выполняет функцию компенсации различий между параметрами исходного («фирменного») блока 1 датчиков пространственного положения зонда и нового блока 1' датчиков пространственного положения зонда, установленного в процессе ремонта. Подбором параметров механических, аналоговых и/или цифровых элементов блока 5 достигается идентичность показаний на дисплее приемника до ремонта (исходное состояние параметров «фирменного» зонда перед началом эксплуатации - "genuine condition") и после ремонта при любой ориентации зонда в пространстве, и реализуется функция:
А= K×А’+S(A’),
где: А - набор данных по трем пространственным координатам, необходимый для корректного отображения положения зонда на дисплее приемника, А’ - тот же набор данных по трем пространственным координатам, но генерируемый новым блоком 1' датчиков пространственного положения зонда, K - коэффициент передачи, подбираемый в процессе юстировки параметров зонда, S(A’) - матрица коэффициентов сдвига, формируемая в процессе юстировки параметров зонда.
Функциональная схема блока 5 сопряжения приведена на фиг. 3, где: 1' - новый блок датчиков пространственного положения зонда, 5 - собственно блок сопряжения.
В блоке 1' датчиков пространственной ориентации с аналоговыми выходами сопряжение осуществляется посредством юстировки параметров аналоговой схемы сопряжения.
Например, устранение систематической ошибки показаний дисплея для продольного наклона зонда осуществляется подбором элементов схемы, приведенной на фиг. 4, где: 8 - операционный усилитель, Vs - опорное напряжение для нового блока датчиков (обычно напряжение питания), устройство 6 - это резистор R2 в цепи обратной связи, устройство 7 - это R1 (R1*, R1**) - резистор, положение которого определяет знак компенсации, а значение определяется по формуле:
R1*=R2×((Vs-VA’)/(VA’-VA)) при положительном знаке величины ошибки продольного наклона (VA’-VA);
R1**=R2×((Vs-VA’)/(VA-VA’)) при отрицательном знаке величины ошибки продольного наклона (VA’-VA).
Цифровая реализация блока 5 сопряжения зависит от вновь применяемого блока 1' датчиков пространственного положения зонда и обычно выполняется на базе микроконтроллера (на чертежах не показан). Необходимые коэффициенты преобразования набора данных А’ в набор данных А определяются в процессе окончательной юстировки параметров конкретного зонда и записываются в долговременную память микроконтроллера.
Так, на фиг. 5 цифровой блок 5 сопряжения содержит матрицу 6 коэффициентов передачи в энергонезависимой памяти микроконтроллера и матрицу 7 коэффициентов сдвига в энергонезависимой памяти микроконтроллера, а также сумматор 8, выполненный на базе арифметико-логического устройства микроконтроллера, входы которых связаны с выходами цифрового интерфейса разрядности n нового блока датчиков пространственной ориентации. При этом выходы матрицы 7 коэффициентов сдвига и матрицы 6 коэффициентов передачи связаны с другими входами сумматора 8. Блок 5 устраняет систематическую ошибку показаний дисплея для текущего положения зонда, преобразуя поступающие с нового цифрового блока 1' сигналы датчиков пространственной ориентации разрядности n в сигналы цифрового интерфейса m разрядности.
Представленный на фиг. 6 цифровой блок 5 содержит аналоговый интерфейс а, через который сигналы с датчиков пространственной ориентации нового блока 1' поступают на аналого-цифровой преобразователь (АЦП) 10 в микроконтроллере, а с него далее на входы матрицы 7 коэффициентов сдвига в энергозависимой памяти микроконтроллера, суммирующего устройства 8 и матрицы 9 корректирующих значений коэффициента передачи в энергонезависимой цифровой памяти микроконтроллера. При этом выходы матрицы 7 коэффициентов сдвига и матрицы 6 коэффициентов передачи, включающей в себя в данном случае АЦП 10 и матрицу 9 коэффициентов, связаны с другими входами сумматора 8. В этом варианте выполнения блок 5 устраняет систематическую ошибку показаний дисплея для текущего положения зонда с одновременным преобразованием аналоговых сигналов от нового аналогового блока 1' датчиков положения в цифровой интерфейс, «понимаемый» блоком преобразователя зонда.
Цифровой блок 5, показанный на фиг. 7, также содержит матрицу 6 коэффициентов передачи в энергонезависимой памяти микроконтроллера и матрицу 7 коэффициентов сдвига в энергонезависимой памяти микроконтроллера и сумматор 8, но в этом случае матрица 6 коэффициентов передачи включает в себя АЦП 10 и матрицу 9 коэффициентов, а сумматор 8 состоит из арифметико-логического устройства 8 микроконтроллера и цифро-аналогового преобразователя (ЦАП) 12 микроконтроллера.
При этом выходы матрицы 7 коэффициентов сдвига и матрицы 6 коэффициентов передачи связаны с другими входами сумматора 8. Блок 5 в этом случае устраняет систематическую ошибку показаний дисплея для текущего положения зонда с одновременным преобразованием аналоговых сигналов а от нового аналогового блока 1' датчиков положения в цифровой интерфейс n для обработки данных микроконтроллером с последующим преобразованием результата в аналоговый интерфейс а, совместимый с блоком преобразователя зонда (если в зонде изначально использовался аналоговый блок датчиков положения).
Критерий успешного ремонта во всех вариантах выполнения блока 5 сопряжения - сохранение или улучшение после ремонта точности отображения пространственной ориентации электронного зонда на экране дисплея приемника.
Таким образом, разработан и опробован на конкретных устройствах способ восстановительного ремонта электронных зондов установок для горизонтально направленного бурения, позволяющий сохранить или улучшить метрологические параметры зонда, не меняя коэффициентов настройки «фирменного» изделия.
В сравнении с прототипом заявляемые способ восстановительного ремонта электронного зонда буровой установки горизонтально направленного бурения и восстановленный электронный зонд, отремонтированный таким способом, обеспечивают более высокую надежность работы зонда после ремонта и обеспечивают сохранение точностных характеристик зонда при его дальнейшей эксплуатации.
Группа изобретений относится к оборудованию для контроля рабочих параметров при бурении и может быть использована для ремонта средств передачи сигналов измерения из скважины на поверхность в процессе бурения как в горизонтальных, так и в других скважинах в процессе бурения. Техническим результатом является повышение надежности и точности работы зонда после ремонта при его последующей работе. Заявляемый способ восстановительного ремонта электронного зонда заключается в том, что после замены блока датчиков пространственного положения зонда производят согласование выходов нового блока датчиков с входами блока преобразователя для восстановления заданных настроек путем реализации с помощью введенного в зонд блока сопряжения функции А=K×А’+S(A’). При этом А - набор данных по трем пространственным координатам, необходимый для корректного отображения положения зонда на дисплее приемника, А’ - тот же набор данных по трем пространственным координатам, но генерируемый новым блоком датчиков пространственного положения зонда, К - коэффициент передачи, подбираемый в процессе юстировки параметров зонда, S(A’) - матрица коэффициентов сдвига, формируемая в процессе юстировки параметров зонда. Заявляемый восстановленный таким способом электронный зонд включает в себя замененный блок 1' датчиков пространственной ориентации, соединенный с его выходом блок 5 сопряжения и подключенный входом к выходу блока 5 блок 2 преобразователя сигналов с блока 1 датчиков. 2 н. и 1 з.п. ф-лы, 7 ил.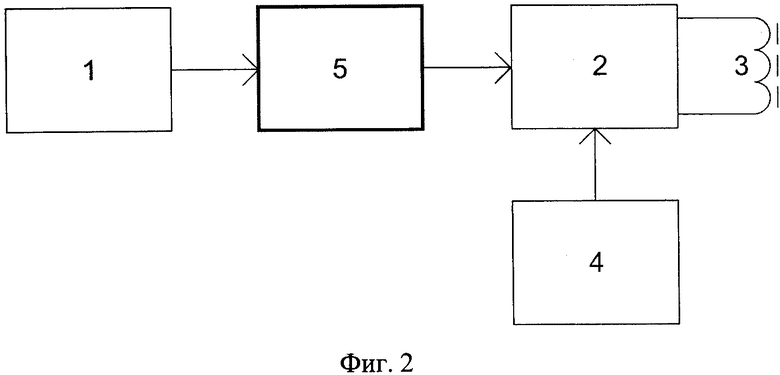
1. Способ восстановительного ремонта электронного зонда буровой установки горизонтально направленного бурения, включающий замену блока датчиков пространственного положения зонда, согласованного в заводских условиях с блоком преобразователя посредством поправочных коэффициентов, записанных в энергонезависимой памяти зонда, отличающийся тем, что после замены блока датчиков пространственного положения зонда производят согласование выходов нового блока датчиков с входами блока преобразователя для восстановления заданных настроек путем реализации функции А=K × А' + S(A'), где А - набор данных по трем пространственным координатам, необходимый для корректного отображения положения зонда на дисплее приемника, А' - тот же набор данных по трем пространственным координатам, но генерируемый новым блоком датчиков пространственного положения зонда, K - коэффициент передачи, подбираемый в процессе юстировки параметров зонда, S(A') - матрица коэффициентов сдвига, формируемая в процессе юстировки параметров зонда.
2. Восстановленный электронный зонд буровой установки горизонтально направленного бурения, включающий замененный блок датчиков пространственной ориентации и связанный с ним блок преобразования сигналов с блока датчиков, отличающийся тем, что в него введен дополнительно блок сопряжения, соединенный входом с выходом блока датчиков, а выходом - с входом блока преобразования сигналов и содержащий набор механических и электронных аналоговых и/или цифровых элементов в виде устройства памяти для хранения коэффициентов передачи, подбираемых в процессе юстировки параметров зонда, вход которого связан с выходом нового блока датчиков, связанным также с входом матрицы коэффициентов сдвига, формируемой в процессе юстировки параметров зонда, а выходы устройства памяти и матрицы связаны с входами сумматора, выход которого является входом для блока преобразователя данных зонда.
3. Восстановленный электронный зонд буровой установки по п. 2, отличающийся тем, что для устранения систематической ошибки показаний дисплея блок сопряжения в нем содержит операционный усилитель, один вход которого соединен с выходом нового блока датчиков, а второй вход через делитель напряжения в цепи обратной связи соединен с выходом операционного усилителя.
| EA 200200780 A1, 25.12.2003 | |||
| Циклонная пылеугольная топка | 1949 |
|
SU89691A2 |
| Аппарат для размола волокнистой массы | 1959 |
|
SU124790A1 |
| Способ контроля качества закалки стали | 1961 |
|
SU144189A1 |
| US 3068400 A1, 11.12.1962. | |||

