Изобретение относится к средствам обнаружения под землей токопроводящих объектов с использованием магнитных или электрических полей, создаваемых или изменяемых объектом или детектирующим устройством и может использоваться, в частности, для контроля глубины положения электронного зонда в головке бурового инструмента при горизонтально направленном бурении в процессе бурения под землей.
Проблема заключается в следующем.
Сигнал электронного зонда в виде переменного магнитного поля определенной частоты, несущий информацию о положении и глубине залегания буровой головки, принимается и обрабатывается приемным устройством (локатор-приемник) на поверхности земли. При этом точность определения координат электронного зонда, размещаемого в головке бурового инструмента, по дистанции (глубине) и по положению может сильно отличаться друг от друга в разных участках местности из-за наличия и обилия так называемых пассивных помех, которые могут представлять собой скопления металла (в виде арматуры, труб и т.п.), повышенную электропроводность почвы или почву, насыщенную ферромагнитными вкраплениями, например, железистым песчаником (см. Руководство по эксплуатации локационной системы F5 компании DCI, США).
Известны два способа вычисления глубины залегания электронного зонда под землей, основанных на измерении параметров генерируемого им магнитного поля.
Первый, абсолютный, основан на строгой зависимости напряженности магнитного поля от расстояния в плоскости, перпендикулярной оси электронного зонда (наводимая ЭДС обратно-пропорциональна кубу расстояния).
Второй способ, дифференциальный, основан на соотношении напряженности магнитного поля зонда на двух дистанциях от зонда, абсолютные значения которых неизвестны, но разность дистанций можно измерить.
Первый способ применяется, в частности, во всех локационных системах для горизонтально направленного бурения (ГНБ) компании DCI (Digital Control Inc., США).
Второй способ широко использовался в более старых локационных системах, например, RD-385L компании RADIODETECTION (Великобритания), где прием сигнала от зонда ведется одновременно на две антенны, разнесенных в пространстве.
К сожалению, оба способа имеют свои недостатки. В первом способе любые неоднородности почвы (арматура, трубопроводы), влияющие на "идеальную" форму силовых линий магнитного поля зонда, приводят к существенному снижению точности определения координат зонда, находящегося в буровой головке под землей. Второй способ отличается увеличением погрешности измерения с увеличением глубины залегания зонда в буровой головке под землей.
Объединение двух способов позволяет существенным образом увеличить точность определения координат зонда под землей. Результаты исследований, расчетов и испытаний такого "объединенного" способа, выбранного далее в качестве прототипа, приведены в ряде публикаций, в частности в статье Наговицына А.Л. "Пассивные помехи в горизонтально направленном бурении: наука побеждать", опубликованной в отраслевом журнале «СТО (Строительство, Технологии, Организация)», №06/63/2018 (см Приложение к заявке).
Здесь в описанном известном способе экспериментальным образом подтверждены основные выводы, позволяющие вообще отказаться от процедуры калибровки при использовании первого способа измерения глубины положения зонда под землей и существенно снижающие погрешность измерений на больших глубинах залегания зонда при применении второго способа.
Для оценки обоих способов вычисления рассмотрим основные формулы, используемые для расчета глубины, где главный посыл основан на строгой зависимости напряженности магнитного поля от расстояния в плоскости, перпендикулярной оси электронного зонда (как уже упоминалось, наведенная ЭДС обратно-пропорциональна кубу расстояния), что отражено в выражении (1).



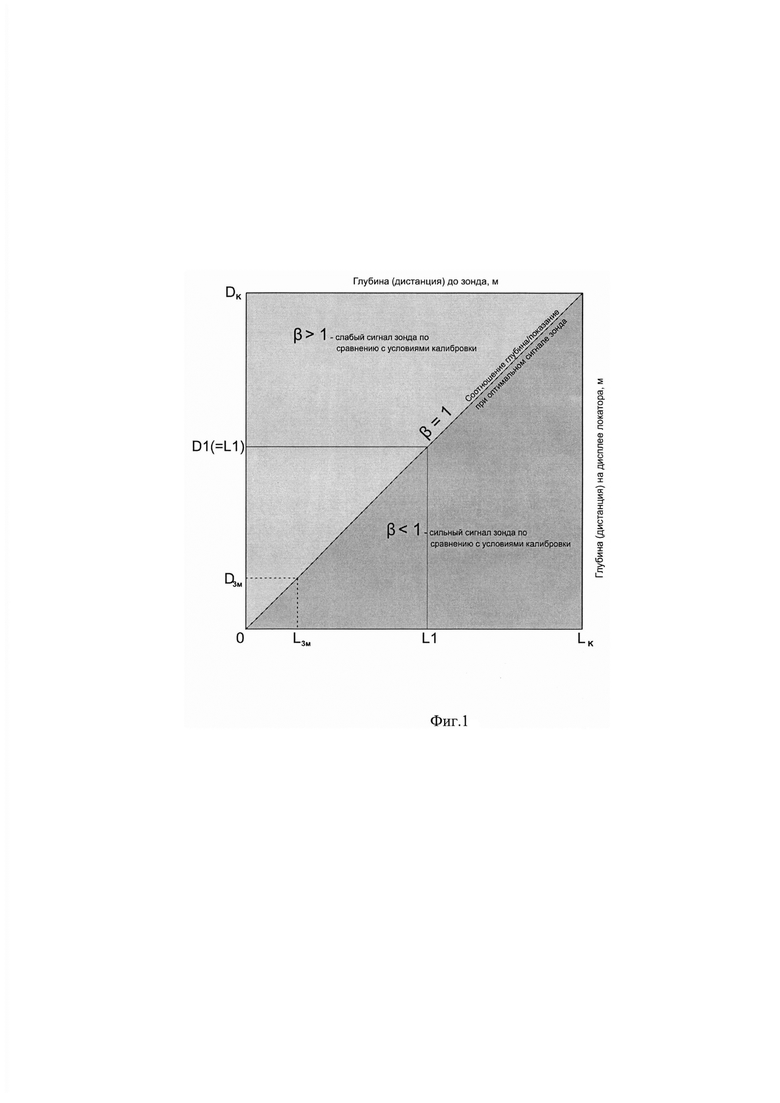
Здесь U - напряжение, наведенное магнитным полем зонда на приемные антенны локатора-приемника, расположенного на расстоянии L от зонда, K(зонд) - коэффициент пропорциональности, зависящий от мощности зонда, М - коэффициент преобразования в локаторе, необходимый для обеспечения равенства показаний D на дисплее локатора с реальной глубиной L. Это тождественно равенству (β=1) в выражении (3) при идеальной калибровке локатора, обычно выполняемой на дистанции 3, 10 или 15 метров между зондом и локатором-приемником на поверхности земли. (см. фиг. 1)
Влияние пассивных помех нарушает условия идеальной калибровки. Это соответствует вариации коэффициента K(зонд) в выражении (2), то есть вариации параметра, который невозможно прямым образом определить под землей. На фиг. 1 показаны области изменения коэффициента (β), включая линию идеальной калибровки, где (β=1). Для устранения ошибок измерения глубины зонда, когда (β≠1), используется способ вычисления положения зонда, основанный на подобии треугольников (см. Приложение к заявке).
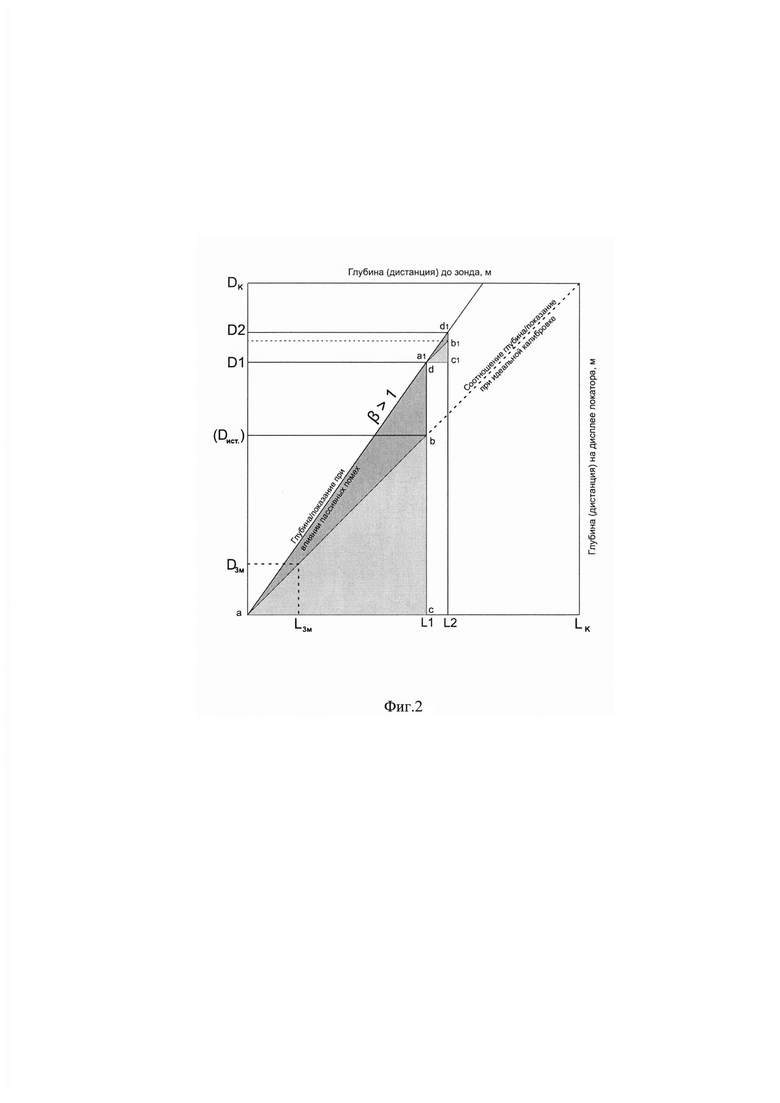
На фиг. 2 приведено графическое пояснение использования данного способа (прототипа).
Расчет реальной глубины зонда L1 производится, исходя из подобия треугольников на основе выражений (4)-(6):



Здесь S(x, x) - длина соответствующих катетов в подобных треугольниках на фиг. 2. И только один параметр неизвестен - L1, то есть реальная глубина положения зонда под землей, остальные либо считываются с экрана локатора-приемника (D1 и D2), либо измеряются рулеткой (L2-L1).
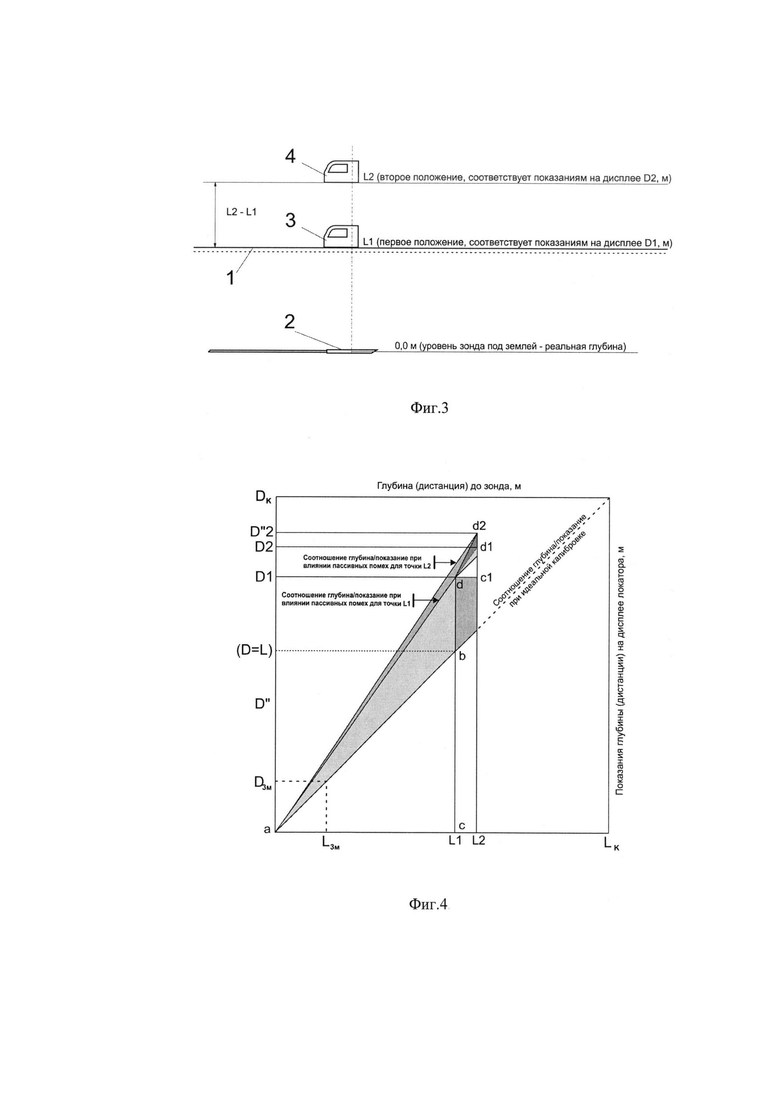
На фиг. 3 изображена схема проведения измерений с расчетом глубины согласно прототипу. Здесь 1 - поверхность земли, 2 - буровая головка с измерительным зондом, 3 - первое положение локатора-приемника, 4 - второе положение локатора-приемника, L1 - первая точка проведения измерения глубины, D1 - показания глубины на дисплее прибора (локатора) в точке L1, вторая точка L2 располагается выше точки L1 и ей соответствуют показания D2 на дисплее локатора. Абсолютные значения L1 и L2, соответствующие расстоянию от локатора до зонда под землей, неизвестны. Значение разности между L2 и L1 по высоте измеряется рулеткой.
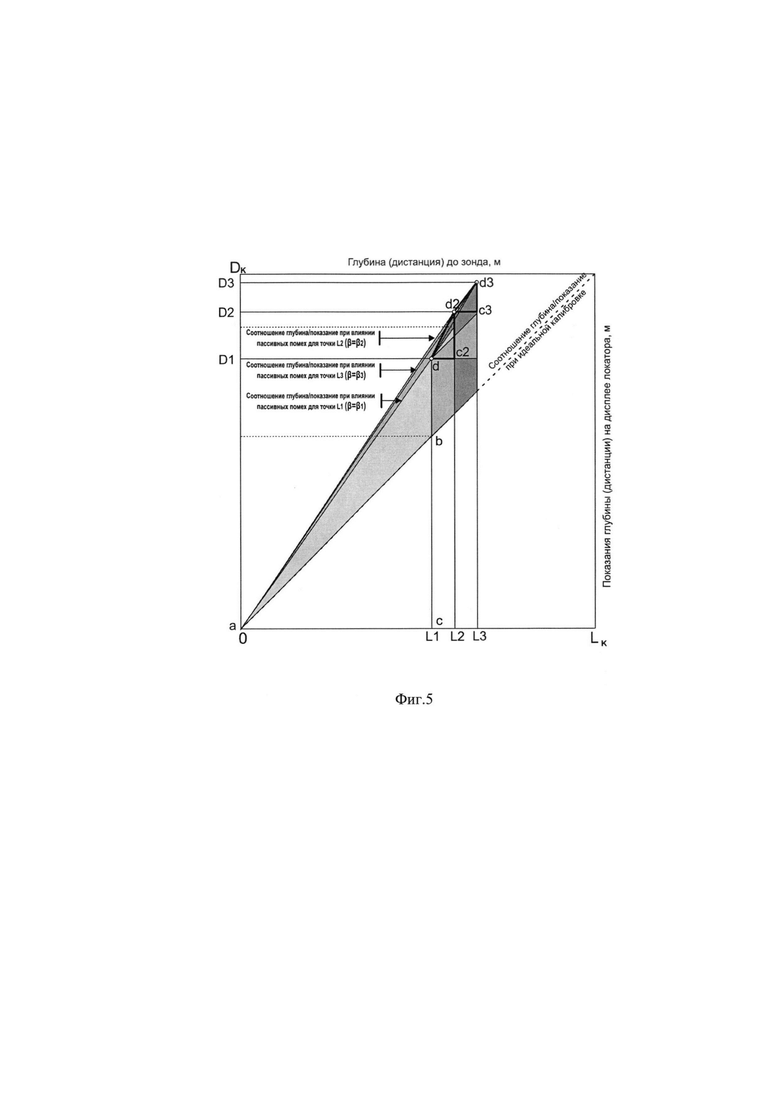
Тем не менее, на практике был выявлен ряд недостатков предложенного объединенного способа, в частности резкое нарастание ошибки измерения при работе на железобетонных площадках, на фундаментах, вблизи коммуникационных колодцев. Причиной этому являются разные условия воздействия пассивных помех, то есть разные значения коэффициента (β) в двух точках измерения глубины L1 и L2 (см. фиг. 4).
На фиг. 4 приведено графическое пояснение возникновения ошибки при разных условиях влияния пассивных помех в точках измерения L1 и L2. Метод подобия треугольников здесь применить нельзя из-за появления дополнительных неизвестных, делающих расчет реальной глубины положения зонда в буровой головке недостоверным.
Если нет уверенности, что вблизи точки L1 (это поверхность грунта (1) на фигуре 3) под землей нет никаких металлических предметов (трубы, арматура), в полной мере доверять расчетам нельзя из-за разного влияния указанных металлических предметов на форму и напряженность переменного магнитного поля от зонда в точках L1 и L2. Необходимо каким-либо образом удостовериться в равенстве условий проведения измерений в указанных точках.
Подытоживая вышесказанное, можно констатировать тот факт, что недостатком описанного в прилагаемой статье прототипа является неудовлетворительная точность определения вышеописанным способом глубины расположения электронного зонда буровой головки в процессе осуществления горизонтально направленного бурения при наличии пассивных помех.
Задачей является повышение точности определения положения электронного зонда буровой головки при наличии пассивных помех.
Поставленная задача решается тем, что в способе повышения точности контроля глубины положения электронного зонда под землей для локационной системы ГНБ, включающем в себя снятие показаний (D1) глубины нахождения электронного зонда по дисплею локатора-приемника на уровне земной поверхности (положение L1), подъем локатора-приемника на величину не менее полуметра относительно земной поверхности (положение L2), снятие показаний (D2) глубины нахождения электронного зонда по дисплею локатора-приемника на новом уровне (положение L2), вычисление реальной глубины положения электронного зонда под землей с помощью метода подобия треугольников по двум значениям показаний D1 и D2 для двух разных положений локатора-приемника по высоте над поверхностью земли (L1 и L2) по формуле:
L1'(м)=D1(м) * (L2-L1)(м) / (D2(м)-D1(м)),
где L1'(м) - реальная глубина положения зонда под землей в метрах, D1(м) и D2(м) - показания глубины в метрах, считываемые с дисплея локатора-приемника при положениях последнего L1 и L2, разность между которыми можно измерить, СОГЛАСНО ИЗОБРЕТЕНИЮ, дополнительно вводят третью точку проведения измерений и производят снятие показаний (D3) глубины нахождения электронного зонда по дисплею локатора-приемника в новом, отличающемся относительно положения L2, третьем положении локатора-приемника (положение L3), рассчитывают значение глубины зонда под землей, основываясь на значениях показаний на дисплее D2 и D3, по формуле: L1''(м)=[D2(м) * (L3-L2)(м) / (D3(м)-D2(м))]-(L2-L1)(м), сравнивают между собой полученные расчетные значения глубины положения зонда под землей L1'(м), L''(м) и при различии полученных расчетных значений глубины положения зонда под землей между собой в пределах 0,95≤(L1'(м) / L1''(м))≤1,05, принимают, что любое из двух расчетных значений глубины в пределах погрешности приборов соответствует реальному положению зонда под землей, а при различии их между собой более, чем в указанных пределах, используют, как более достоверное, значение реальной глубины L1''(м).
Введение дополнительно третьей точки проведения измерений и снятие показаний (D3) глубины нахождения электронного зонда по дисплею локатора-приемника в новом, отличающемся относительно положения L2, третьем положении локатора-приемника (положение L3), расчет значения глубины зонда под землей, основываясь на значениях показаний на дисплее D2 и D3, по формуле:
L1''(м)=[D2(м) * (L3-L2)(м) / (D3(м)-D2(м))]-(L2-L1)(м), в совокупности со сравнением между собой полученных расчетных значений глубины положения зонда под землей L1'(м), L1''(м) и принятием при различии полученных расчетных значений глубины положения зонда под землей между собой в пределах 0,95≤(L1'(м) / L1''(м))≤1,05, решения о том, что любое из двух расчетных значений глубины в пределах погрешности приборов соответствует реальному положению зонда под землей, а при различии их между собой более, чем в указанных пределах, используют, как более достоверное, значение реальной глубины L1''(м), дает возможность более точно определить реальную глубину расположения электронного зонда под землей при наличии пассивных помех.
Технический результат - повышение точности определения положения зонда под землей при наличии в ней пассивных помех.
Заявляемый способ обладает новизной в сравнении с прототипом, отличаясь от него такими существенными признаками как введение дополнительно третьей точки проведения измерений, снятие показаний (D3) глубины нахождения электронного зонда по дисплею локатора-приемника в новом, отличающемся относительно положения L2, третьем положении локатора-приемника (положение L3), расчет значения глубины зонда под землей, основываясь на значениях показаний на дисплее D2 и D3, по формуле: L1''(м)=[D2(м) * (L3-L2)(м) / (D3(м)-D2(м))]-(L2-L1)(м), сравнение между собой полученных расчетных значений глубины положения зонда под землей L1'(м), L1''(м) и принятие при различии полученных расчетных значений глубины положения зонда под землей между собой в пределах 0,95≤(L1'(м) / L1''(м))≤1,05, решения о том, что любое из двух расчетных значений глубины в пределах погрешности приборов соответствует реальному положению зонда под землей, а при различии их между собой более, чем в указанных пределах, использование, как более достоверного, значения реальной глубины L1''(м), обеспечивающими в совокупности достижение заданного результата.
Заявителю неизвестны технические решения, обладающие указанными отличительными признаками, которые обеспечивали бы в совокупности достижение заданного технического результата, поэтому он считает, что заявляемый способ соответствует критерию «изобретательский уровень».
Заявляемый способ может успешно использоваться при осуществлении горизонтально направленного бурения и потому соответствует критерию «промышленная применимость».
Изобретение иллюстрируется чертежами, где на фиг. 1-4 представлены иллюстрации, поясняющие принцип работы прототипа, а на фиг. 5, 6 - иллюстрации к сущности заявляемого способа.
Более конкретно на чертежах представлены на:
- фиг. 1 - области изменения коэффициента (β), включая линию идеальной калибровки, где (β=1) для прототипа;
- фиг. 2 - графическое пояснение использования известного способа (прототипа);
- фиг. 3 - схема проведения измерений с расчетом глубины согласно прототипу;
- фиг. 4 - графическое пояснение возникновения ошибки при разных условиях влияния пассивных помех в точках измерения L1 и L2 в прототипе;
-фиг.5 - графическое пояснение заявляемого способа расчетной оценки достоверности положения электронного зонда по глубине;
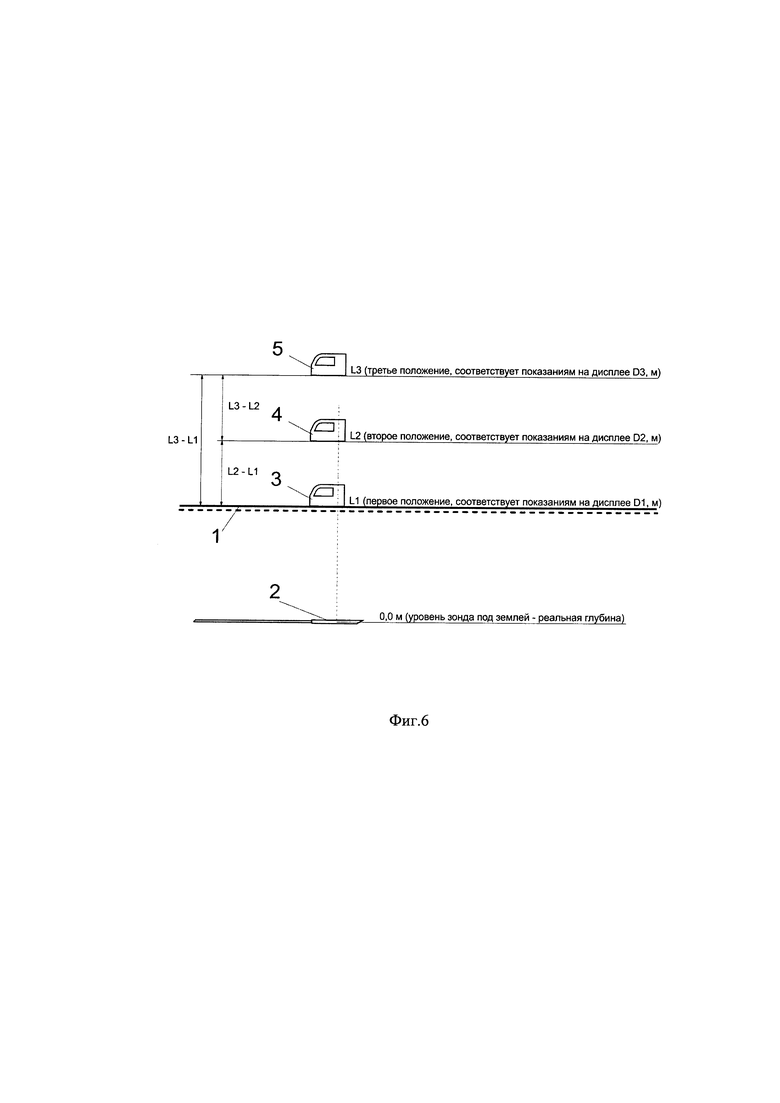
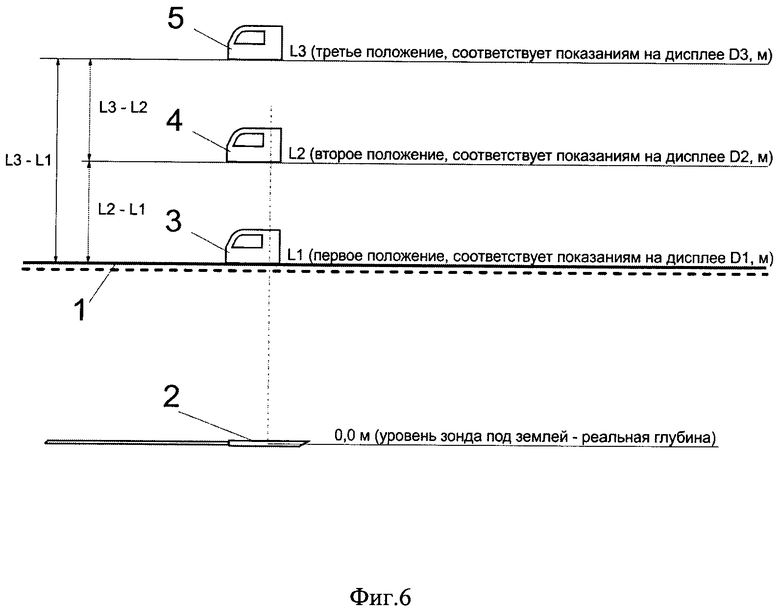
- фиг. 6 - изображена схема проведения подобных измерений с расчетом трех значений глубины L1 согласно формулам 7-9 для заявляемого способа.
Заявляемый способ заключается в следующем.
Снимают показания (D1) глубины нахождения электронного зонда по дисплею локатора-приемника на уровне земной поверхности (положение L1). Затем осуществляют подъем локатора-приемника на величину не менее полуметра относительно земной поверхности (положение L2) и снимают показание (D2) глубины нахождения электронного зонда по дисплею локатора-приемника на новом уровне (положение L2). Вводят третью точку проведения измерений и производят снятие показаний (D3) глубины нахождения электронного зонда по дисплею локатора-приемника в новом, отличающемся относительно положения L2, третьем положении локатора-приемника (положение L3) (см. фиг. 5). Вычисление реальной глубины положения электронного зонда под землей производят с помощью метода подобия треугольников. Рассчитывают значение глубины зонда под землей, основываясь на значениях показаний на дисплее D2 и D3, по формуле: L1''(м)=[D2(м) * (L3-L2)(м) / (D3(м)-D2(м))]-(L2-L1)(м), где L1''(м) - значение реальной глубины расположения электронного зонда. Сравнивают между собой полученные расчетные значения глубины положения зонда под землей L1'(м), L1''(м) и при различии полученных расчетных значений глубины положения зонда под землей между собой в пределах 0,95≤(L1'(м) / L1''(м))≤1,05, принимают, что любое из двух расчетных значений глубины в пределах погрешности приборов соответствует реальному положению зонда под землей. При различии двух расчетных значений глубины между собой более, чем в указанных пределах, используют, как более достоверное, значение реальной глубины L1''(м.).
На фиг. 5 представлено графическое пояснение предлагаемого способа расчетной оценки достоверности положения электронного зонда по глубине. Чем выше степень подобия треугольников d-d2-c2 и d2-d3-c3, тем выше соответствие расчетной глубины истинному значению глубины положения зонда под землей.
На фиг. 6 изображена схема проведения подобных измерений с расчетом трех значений глубины L1 согласно формулам (7)-(9). Здесь 5 - третье положение локатора-приемника, а точка положения локатора L3 может располагаться как ниже точки L2, так и выше. Расчеты трех значений глубин L1', L1'', L1''' производят по следующим формулам:



Здесь значение глубины D3 на дисплее локатора соответствует положению последнего в точке L3.
Абсолютные значения LI, L2, L3 неизвестны, но известна разность между ними, которая может быть измерена рулеткой. Существенные различия реальной глубины зонда L1, рассчитанные по трем разным точкам положения локатора над землей, свидетельствуют о нарушении эквивалентности условий измерений в точках LI, L2, L3 (то есть отличающиеся значения коэффициента (β)). За границу достоверности можно принять различие двух (или трех) расчетных значений L1 на 5%, что соответствует заявляемой производителем (компания DCI, США) погрешности измерения глубины локатором.

Если погрешность меньше 5%, допустимо использование способа измерения глубины залегания зонда, приведенного в прототипе. Если погрешность больше, то более достоверным является расчет глубины Lie использованием показаний D2 и D3 локатора в точках L2 и L3 по формуле (8), причем чем выше подняты точки L2 и L3 над точкой L1 ("отрыв" от поверхности, под которой расположены неизвестные источники пассивных помех - арматура, трубопроводы, строительный мусор), тем выше точность расчета глубины положения зонда под землей.
В сравнении с прототипом заявляемый способ обеспечивает более высокую точность определения глубины положения электронного зонда буровой головки под землей при наличии в ней пассивных помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ восстановительного ремонта электронного зонда буровой установки горизонтально направленного бурения и восстановленный таким способом электронный зонд | 2015 |
|
RU2617816C2 |
| Блок ортогональных магнитных антенн для приемника локационной системы ГНБ | 2021 |
|
RU2777349C1 |
| Локатор для определения местоположения зонда при горизонтально направленном бурении | 2024 |
|
RU2831103C1 |
| Устройство для корректируемого по направлению расширения пилотной скважины | 2022 |
|
RU2778870C1 |
| СПОСОБ ОПТИЧЕСКОЙ ОБРАБОТКИ ИЗОБРАЖЕНИЯ И ОПТИЧЕСКАЯ СИСТЕМА ДЛЯ НЕГО | 2010 |
|
RU2429509C1 |
| ЭЛЕКТРОННЫЙ ЗОНД ДЛЯ БУРОВЫХ ГОЛОВОК УСТАНОВОК ГОРИЗОНТАЛЬНО НАПРАВЛЕННОГО БУРЕНИЯ | 2014 |
|
RU2549944C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В НАВИГАЦИОННОЙ СИСТЕМЕ | 2003 |
|
RU2311690C2 |
| СПОСОБ КРАТКОСРОЧНОГО ПРОГНОЗИРОВАНИЯ ЗЕМЛЕТРЯСЕНИЙ | 2009 |
|
RU2423729C1 |
| Способ и система швартовки судна | 2020 |
|
RU2747521C1 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ РЕЛЬСОВОГО ПУТИ | 2012 |
|
RU2570517C2 |
Изобретение относится к контролю глубины положения электронного зонда в головке бурового инструмента при горизонтально направленном бурении в процессе бурения под землей. Технический результат: повышение точности определения положения электронного зонда буровой головки при наличии пассивных помех. Сущность: снимают показания (D1) глубины нахождения электронного зонда по дисплею локатора-приемника на уровне земной поверхности (положение L1). Затем осуществляют подъем локатора-приемника на величину не менее полуметра относительно земной поверхности (положение L2) и снимают показание (D2) глубины нахождения электронного зонда по дисплею локатора-приемника на новом уровне (положение L2). Вводят третью точку проведения измерений и производят снятие показаний (D3) глубины нахождения электронного зонда. Вычисляют глубины L1’(м) и L1'' положения электронного зонда под землей с помощью метода подобия треугольников, основываясь на значениях показаний D1 и D2, а также D2 и D3 соответственно. Сравнивают между собой полученные значения L1'(м), L1''(м). При различии полученных значений в пределах 0,95≤(L1'(м) / L1''(м))≤1,05, принимают, что любое из двух значений глубины в пределах погрешности приборов соответствует реальному положению зонда под землей. При различии двух расчетных значений глубины между собой более, чем в указанных пределах, используют, как более достоверное, значение реальной глубины L1''(м). 6 ил.
.
Способ повышения точности контроля глубины положения электронного зонда под землей для локационной системы ГНБ, включающий в себя снятие показаний (D1) глубины нахождения электронного зонда по дисплею локатора-приемника на уровне земной поверхности (положение L1), подъем локатора-приемника на величину не менее полуметра относительно земной поверхности (положение L2), снятие показаний (D2) глубины нахождения электронного зонда по дисплею локатора-приемника на новом уровне (положение L2), вычисление реальной глубины положения электронного зонда под землей с помощью метода подобия треугольников по двум значениям показаний D1 и D2 для двух разных положений локатора-приемника по высоте над поверхностью земли (L1 и L2) по формуле:
L'(м)=D1(м) * (L2-L1)(м) / (D2(м)-D1(м)),
где L1'(м) - реальная глубина положения зонда под землей в метрах, D1(м) и D2(м) - показания глубины в метрах, считываемые с дисплея локатора-приемника при положениях последнего L1 и L2, разность между которыми можно измерить, отличающийся тем, что дополнительно вводят третью точку проведения измерений и производят снятие показаний (D3) глубины нахождения электронного зонда по дисплею локатора-приемника в новом, отличающемся относительно положения L2, третьем положении локатора-приемника (положение L3), рассчитывают значение глубины зонда под землей, основываясь на значениях показаний на дисплее D2 и D3, по формуле:
L1''(м)=[D2(м) * (L3-L2)(м) / (D3(м)-D2(м))]-(L2-L1)(м),
сравнивают между собой полученные расчетные значения глубины положения зонда под землей L'(м), L1''(м) и при различии полученных расчетных значений глубины положения зонда под землей между собой в пределах 0,95≤(L1'(м) / L1''(м))≤1,05 принимают, что любое из двух расчетных значений глубины в пределах погрешности приборов соответствует реальному положению зонда под землей, а при различии их между собой более, чем в указанных пределах, используют, как более достоверное, значение реальной глубины L1''(м).
| US 5720354, 24.02.1998 | |||
| US 20030136583 A1, 24.07.2003 | |||
| US 8754648 B2, 17.06.2014 | |||
| А.Л | |||
| НАГОВИЦЫН, Пассивные помехи в горизонтально направленном бурении: наука побеждать, СТО (Строительство, Технологии, Организации), 2018, N 6 (63). |

