ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к датчику ускорения и способу изготовления такого датчика ускорения. В частности, изобретение относится к микроэлектромеханическому датчику ускорения для измерения ускорения параллельного поверхности подложки датчика ускорения, а также к способу изготовления такого микромеханического датчика ускорения.
УРОВЕНЬ ТЕХНИКИ
Микроэлектромеханические датчики ускорения являются микросистемами или также системами MEMS (англ.: micro-electromechanical system), которые способны регистрировать ускорения. Обычно для этого предусмотрена одна или более пробная масса (или также маятник), которая при ускорении датчика отклоняется относительно подложки датчика. Для этого пробная масса может быть соединена с подложкой с возможностью перемещения, например, с помощью пружины.
Для регистрирования ускорения электрод (далее: «подвижный электрод») является составной частью пробной массы, а на подложку нанесен неподвижный противоположный электрод, который расположен напротив подвижного электрода. Если при отклонении пробной массы происходит изменение расстояния между подвижным электродом и противоположным электродом, то его регистрируют цепью регулирования (замкнутой цепью, Closed Loop) и к электродам прикладывают соответствующее напряжение, которое ведет к возврату пробной массы в исходное положение. При этом величина приложенного напряжения служит для определения ускорения.
Для обеспечения возможности регистрирования ускорений в более чем одном измерении могут быть предусмотрены, например, три одинаковых по конструкции датчика ускорения, ось регистрирования каждого из которых соответственно ориентирована по одной из трех пространственных осей. Альтернативно или дополнительно возможно, например, обеспечивают на одной и той же подложке несколько пробных масс с возможностью отклонения в различных направлениях.
Вследствие своей предпочтительной линейной характеристики в последнее время хорошо зарекомендовали себя датчики ускорения с зацепляющимися (или входящими в зацепление) друг с другом электродами. При этом подвижные электроды и противоположные электроды выполнены в виде гребенчатых электродов, причем зубья соответствующих гребенок входят в зацепление друг с другом. Таким образом, подвижные электроды и противоположные электроды образуют конденсатор, причем возвращающее напряжение, которое должно быть приложено к электродам этого конденсатора для возврата в исходное состояние, является в широких диапазонах линейным относительно отклонения пробной массы.
Проблема такой конструкции входящих друг в друга с зацеплением электродов заключается в недостаточном демпфировании, так что при высоких ускорениях, например, подвижный электрод может сталкиваться с противоположным электродом или прокладкой, что может привести к механическим дефектам и неточным или непригодным результатам измерения.
В документе DE-A1-10 2011 083487 раскрыт датчик ускорения, содержащий подложку, подвижную массу и измерительное устройство, причем подвижная масса выполнена с возможностью отклонения вдоль направления отклонения в виде движения отклонения относительно подложки под действием внешнего ускорения, действующего на датчик ускорения, измерительное устройство выполнено с возможностью перемещения вдоль направления перемещения в виде измерительного движения относительно подложки с обеспечением измерения отклонения подвижной массы, а измерительное устройство соединено с подвижной массой таким образом, что амплитуда указанного отклонения вдоль направления отклонения больше, чем амплитуда измерительного движения вдоль направления измерения.
В документе US-A1-2012/031185 раскрыт микромеханический датчик ускорения, который содержит подложку и подвижную массу, которая расположена с возможностью перемещения в направлении измерения относительно подложки. Указанный микромеханический датчик ускорения содержит одно или более демпфирующее устройство для демпфирования движений подвижной массы, перпендикулярных направлению измерения.
В документе WO-A1-2006/105314 раскрыт емкостной датчик ускорения, который содержит первый неподвижный электрод и второй неподвижный электрод. Указанный первый неподвижный электрод отделен от второго неподвижного электрода зазором. Между первым и вторым неподвижными электродами расположен подвижный электрод, который рассчитан таким образом, чтобы обеспечивать демпфирование сжатия между подвижным и неподвижными электродами для демпфирования движения подвижного электрода. Электрическая схема определяет положение подвижного электрода в любом положении в по существу всем пространстве зазора между первым и вторым неподвижными электродами.
В документе US-A1-2007/029629 раскрыт микромеханический датчик и способ изготовления и вертикальное исполнение датчика и электрической схемы на подложке кристалла. Указанный процесс включает обработку первой кристаллической пластины для неполного определения измерительной структуры на первой ее поверхности, объединение первой и второй кристаллических пластин вместе и последующее травление кристаллической пластины с обеспечением завершения первой измерительной структуры, включая высвобождение элемента относительно второй кристаллической пластины.
Таким образом, задачей изобретения является обеспечение датчика ускорения с входящими в зацепление гребенчатыми электродами, при котором увеличено демпфирование движения отклонения пробной массы. Указанную задачу решают с помощью изобретения согласно независимым пунктам формулы изобретения. Предпочтительные варианты реализации описаны в зависимых пунктах.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Датчик ускорения согласно настоящему изобретению содержит, например, подложку, которая имеет поверхность подложки. Кроме того, датчик ускорения содержит пробную массу, которая выполнена с возможностью перемещения относительно подложки по существу в параллельном поверхности подложки в положительном направлении (x) отклонения, причем пробная масса содержит подвижный гребенчатый электрод, выполненный с возможностью перемещения вместе с пробной массой, а подвижный гребенчатый электрод содержит множество зубьев, которые проходят в положительном направлении (x) отклонения. В некоторых вариантах реализации изобретения датчик ускорения, кроме того, содержит неподвижно соединенный с подложкой противоположный электрод, причем противоположный электрод содержит неподвижный гребенчатый электрод, а неподвижный гребенчатый электрод содержит множество зубьев, которые проходят в направлении, противоположном положительному направлению (x) отклонения, причем зубья подвижного гребенчатого электрода и зубья неподвижного гребенчатого электрода входят с зацеплением друг в друга. Далее, в некоторых вариантах реализации изобретения датчик ускорения содержит неподвижно соединенный с подложкой экранирующий электрод, который выполнен с возможностью увеличения пневматического демпфирования пробной массы во время движения отклонения пробной массы.
Под термином «пневматическое демпфирование» в последующем следует понимать, например, демпфирование, соответственно, увеличение или уменьшения частичного объема, при котором, например, газ протекает из уменьшающегося частичного объема в увеличивающийся частичный объем. Подробное пояснение термина «пневматическое демпфирование» приведено ниже.
Далее, подвижный гребенчатый электрод содержит спинку гребенки с поверхностью спинки гребенки, которая проходит в целом перпендикулярно положительному направлению (x) отклонения. В некоторых вариантах реализации изобретения экранирующий электрод содержит поверхность экранирующего электрода, которая в целом параллельна поверхности спинки гребенки.
Кроме того, поверхность спинки гребенки и поверхность экранирующего электрода расположены напротив друг друга. Во время движения отклонения пробной массы изменяется расстояние между поверхностью спинки гребенки и поверхностью экранирующего электрода, причем изменение расстояния используют для увеличения пневматического демпфирования пробной массы.
Пробная масса отклоняется при ускорении под действием своей инерции масс и по истечению определенного времени возвращается в свое состояние покоя под действием упругой возвращающей силы. Далее, напряжение, которое прикладывают к подвижному гребенчатому электроду и неподвижному гребенчатому электроду или к противоположному электроду обеспечивает отклонение пробной массы под действием электростатических сил. При движении отклонения пробной массы изменяющееся расстояние между расположенными напротив друг друга поверхностями (поверхностью спинки гребенки и поверхностью экранирующего электрода) обеспечивает, например, изменение объема между поверхностью спинки гребенки и поверхностью экранирующего электрода. Изменение объема способствует увеличению пневматического демпфирования пробной массы.
Далее, пробная масса и экранирующий электрод подключены к одному и тому же электрическому потенциалу.
При этом пробная масса и экранирующий электрод приведены к одному и тому же электрическому потенциалу посредством приложения напряжения с помощью соответствующих электрических соединений. Если пробная масса и экранирующий электрод имеют один и тот же электрический потенциал, то между ними отсутствуют притягивающие или отталкивающие электростатические силы. Таким образом, движению отклонения пробной массы не мешают электростатические силы между пробной массой и экранирующим электродом. Это обеспечивает повышение точности измерения ускорения.
Противоположный электрод и экранирующий электрод механически соединены между собой с помощью изоляционного слоя.
Изоляционный слой представляет собой, например, оксидный слой, который обеспечивает электрическую изоляцию между экранирующим электродом и противоположным электродом. Если противоположный электрод и экранирующий электрод механически соединены друг с другом, это обеспечивает преимущество, выраженное в возможности исполнения экранирующего электрода более тонким, так как противоположный электрод обеспечивает механическую стабильность. За счет этого возможны, например, экономия места и/или улучшение механической стабильности.
Пробная масса содержит дополнительный подвижный с пробной массой гребенчатый электрод, причем дополнительный подвижный гребенчатый электрод содержит множество зубьев, которые проходят в направлении, противоположном положительному направлению (x) отклонения. Далее, в некоторых вариантах реализации изобретения датчик ускорения содержит дополнительный неподвижно соединенный с подложкой противоположный электрод, причем дополнительный противоположный электрод содержит дополнительный неподвижный гребенчатый электрод, причем дополнительный гребенчатый электрод содержит множество зубьев, которые проходят в положительном направлении (x) отклонения, при этом зубья дополнительного подвижного гребенчатого электрода и зубья дополнительного неподвижного гребенчатого электрода могут входить с зацеплением друг в друга. Датчик ускорения содержит неподвижно соединенный с подложкой дополнительный экранирующий электрод, который выполнен с возможностью увеличения пневматического демпфирования во время движения отклонения пробной массы.
Дополнительные подвижные гребенчатые электроды и дополнительные неподвижные гребенчатые электроды обеспечивают более точное регистрирование, например, ускорения в положительном направлении (x) отклонения, а также в направлении, противоположном положительному направлению (x) отклонения. В таком случае и для отклонения в положительном, и для отклонения в отрицательном направлении x существуют соответствующие электроды для регистрирования ускорения или возврата пробной массы в исходное положение.
Экранирующий электрод и дополнительный экранирующий электрод могут быть соединены друг с другом с образованием цельной конструкции или за одно целое.
При этом предусмотрен, например, один электрод, который выполняет как функцию экранирующего электрода, так и функцию дополнительного экранирующего электрода. Это может, например, быть предпочтительно для механической стабильности экранирующего электрода или дополнительного экранирующего электрода. К тому же за счет такой конструкции возможно обеспечить, например, экономию пространства на подложке, так как исключают промежуточное пространство между экранирующим электродом и дополнительным экранирующим электродом.
Датчик ускорения содержит один или более пружинный элемент, который соединяет между собой пробную массу и подложку с обеспечением возможности отклонения пробной массы в положительном направлении (x) отклонения и обеспечением в целом жесткого крепления пробной массы в направлении (y), перпендикулярном положительному направлению (x) отклонения и параллельном поверхности подложки.
Также обеспечена возможность в целом жесткого крепления пробной массы в направлении (z), перпендикулярном поверхности подложки.
За счет жесткого крепления пробной массы в направлениях, в которых не должно производиться регистрирование движения отклонения или ускорения, обеспечивают, например, повышение точности измерения ускорения, так как расстояние между подвижным гребенчатым электродом и неподвижным гребенчатым электродом изменяется лишь в направлении x, но не в направлениях у или z.
Способ изготовления датчика ускорения может включать этапы: изготовление подложки, которая содержит поверхность подложки; и изготовление пробной массы, которая выполнена с возможностью перемещения относительно подложки в положительном направлении (x) отклонения, которое в целом в параллельно поверхности подложки, причем пробная масса содержит подвижный гребенчатый электрод, выполненный с возможностью перемещения вместе с пробной массой, а подвижный гребенчатый электрод содержит множество зубьев, которые проходят в положительном направлении (x) отклонения. Кроме того, способ может включать следующие этапы: изготовление противоположного электрода, неподвижно соединенного с подложкой, причем противоположный электрод содержит неподвижный гребенчатый электрод, а неподвижный гребенчатый электрод содержит множество зубьев, которые проходят в направлении, противоположном положительному направлению (x) отклонения, и причем зубья подвижного гребенчатого электрода и зубья неподвижного гребенчатого электрода входят в зацепление друг с другом; и изготовление экранирующего электрода, который неподвижно соединен с подложкой и выполнен с возможностью увеличения пневматического демпфирования пробной массы во время движения отклонения пробной массы.
Способ изготовления датчика ускорения содержит, далее, следующие этапы: настройка давления газа датчика ускорения с обеспечением регулировки оптимального демпфирования движения отклонения пробной массы.
В некоторых вариантах реализации изобретения способ изготовления датчика ускорения может дополнительно включать следующие этапы: подбор расстояния между подвижным гребенчатым электродом и экранирующим электродом при заданном давлении газа датчика ускорения с обеспечением регулировки оптимального демпфирования движения отклонения пробной массы.
При этом, например, оптимальное давление газа (или давление наполнения) или оптимальное расстояние между подвижным гребенчатым электродом и экранирующим электродом обеспечивают оптимальное демпфирование пробной массы. Далее, оптимальное демпфирование обеспечивают за счет подбора типа газа, использующегося для заполнения датчика ускорения. При обеспечении оптимального демпфирования оно является не таким высоким, что пробная масса сильно задемпфирована и из-за этого не имеет возможности отклоняться в достаточной мере, и не таким малым, что, например, подвижный и неподвижный гребенчатые электроды, или подвижный электрод или пробная масса и прокладка соударяются друг с другом.
Далее на основании фигур описаны варианты реализации изобретения, его принцип действия, а также его преимущества. Возможно комбинировать элементы вариантов реализации, так как они не исключают друг друга.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 показывает схематический вид сверху датчика ускорения в соответствии с настоящим изобретением.
Фиг. 2 показывает схематический вид сверху датчика ускорения в соответствии с настоящим изобретением, причем средства электрического соединения пробной массы, противоположных электродов и экранирующих электродов изображены схематически.
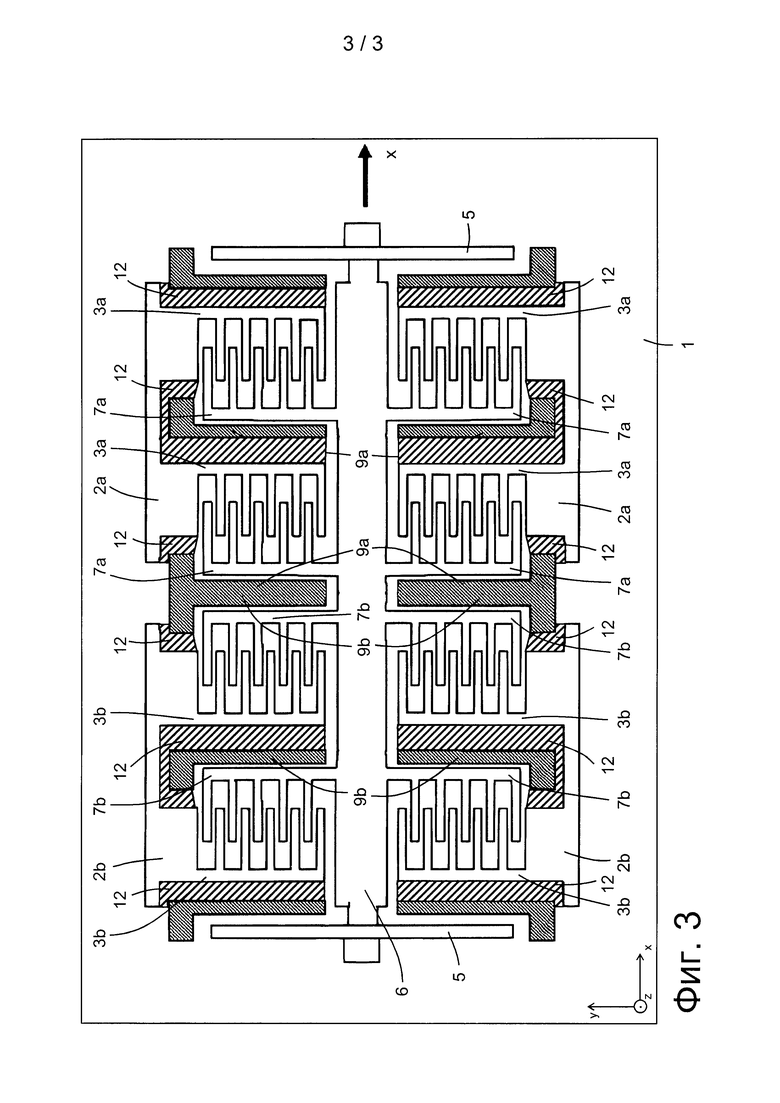
Фиг. 3 показывает схематический вид сверху датчика ускорения в соответствии с изобретением, причем противоположные электроды и экранирующие электроды механически соединены между собой через изоляционные слои.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
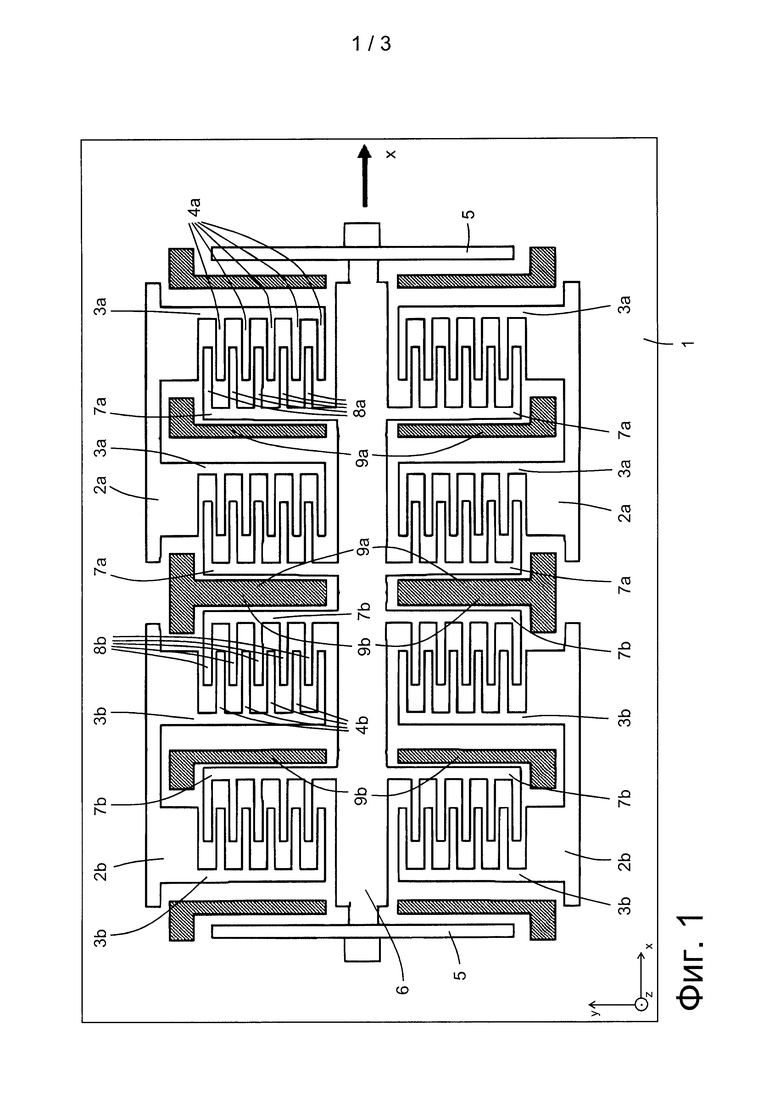
Фиг. 1 показывает вид сверху датчика ускорения для измерения ускорения в положительном направлении отклонения (направлении x) параллельно плоскости чертежа. В плоскости чертежа расположена поверхность подложки 1, на которой расположены дополнительные элементы датчика ускорения. Таким образом, далее ось x является чувствительной осью, вдоль которой измеряют (отрицательное или положительное) ускорение. Ось y расположена перпендикулярно к ней и находится на изображении по фиг. 1 параллельно плоскости чертежа или параллельно поверхности подложки 1. Ось z расположена перпендикулярно к оси x и к оси y и описывает, тем самым, нормаль плоскости чертежа по фиг.1 или поверхности подложки.
С подложкой 1 неподвижно соединены противоположные электроды 2а и дополнительные противоположные электроды 2b. В примере исполнения по фиг. 1 изображены соответственно два противоположных электрода 2а и два дополнительных противоположных электрода 2b, причем количество противоположных электродов 2а или дополнительных противоположных электродов 2b не ограничено этим. Так, например, могут быть предусмотрены также лишь соответственно один противоположный электрод 2а и один дополнительный противоположный электрод 2b или могут быть предусмотрено соответственно более двух противоположных электродов 2а и более двух дополнительных противоположных электродов 2b. Однако могут быть предусмотрены также, например, лишь противоположные электроды 2а и не предусмотрены дополнительные противоположные электроды 2b.
Неподвижно соединенные с подложкой 1 противоположные электроды 2а содержат неподвижные гребенчатые электроды 3а, которые соответственно содержат множество зубьев 4а, которые проходят в отрицательном направлении x, то есть в направлении, противоположном положительному направлению (x) отклонения. Эти неподвижные гребенчатые электроды называют неподвижными, так как они или соответствующие противоположные электроды 2а неподвижно соединены с подложкой. Неподвижные гребенчатые электроды могут быть выполнены, например, с такой формой, при которой они содержат спинку гребня, а также несколько зубьев 4а, простирающихся под прямым углом от спинки гребня.
Аналогично этому неподвижно соединенные с подложкой 1 дополнительные противоположные электроды 2b могут содержать дополнительные неподвижные гребенчатые электроды 3b, которые могут содержать несколько зубьев 4b, которые проходят в положительном направлении (x) отклонения. Также и эти дополнительные неподвижные гребенчатые электроды могут в соответствии с описанным выше содержать спинку гребня и несколько простирающихся с прохождением оттуда зубьев 4b.
В примере исполнения по фиг. 1 каждый противоположный электрод 2а и каждый дополнительный противоположный электрод 2b содержит соответственно два гребенчатых электрода (неподвижные гребенчатые электроды 3а или дополнительные неподвижные гребенчатые электроды 3b), причем количество неподвижных гребенчатых электродов 3а или дополнительных неподвижных гребенчатых электродов 3b не ограничено этим. Так, например, для каждого противоположного электрода 2а или для каждого дополнительного противоположного электрода 2b могут быть предусмотрены соответственно лишь один неподвижный гребенчатый электрод 3а или один дополнительный неподвижный гребенчатый электрод 3b или может быть предусмотрено соответственно более двух неподвижных гребенчатых электродов 3a или более двух дополнительных неподвижных гребенчатых электродов 3b.
Возможными представляются также примеры исполнения, в которых предусмотрены исключительно противоположные электроды 2а и не предусмотрены дополнительные противоположные электроды 2b, так что с подложкой соединены исключительно противоположные электроды 2а, которые содержат гребенчатые электроды 3a, зубья 4а которых проходят в отрицательном направлении х.
С помощью одного или нескольких пружинных элементов 5 пробная масса 6 (часто называемая также «маятником») соединена с подложкой 1. Пружинный элемент 5 соединяет между собой пробную массу 6 и подложку 1 таким образом, что пробная масса 6 может выполнять движение отклонения в положительном направлении отклонения (положительное направление x) и в направлении, противоположном положительному направлению отклонения (отрицательное направление x). При этом вследствие инерции масс, например, при ускорении подложки 1 в отрицательном направлении x, происходит отклонение пробной массы 6 относительно подложки 1 в положительном направлении x. Пробная масса 6 скреплена с помощью пружинного элемента 5 с подложкой 1 таким образом, что хотя отклонение возможно в положительном и отрицательном направлениях x, в таких направлениях как у, так и z она в целом укреплена неподвижно.
Пробная масса 6 содержит по меньшей мере один подвижный, т.е. выполненный с возможностью перемещения вместе с пробной массой 6 гребенчатый электрод 7а, причем этот «подвижный» гребенчатый электрод 7а неподвижно соединен с пробной массой 6 и, тем самым, укреплен с возможностью движения относительно подложки 1. Количество подвижных гребенчатых электродов 7а может определяться, например, количеством неподвижных гребенчатых электродов 3a, исходя в этом отношении из того, что для каждого неподвижного гребенчатого электрода 3a на пробной массе 6 может быть предусмотрен один подвижный гребенчатый электрод 7а.
Указанный по меньшей мере один подвижный гребенчатый электрод 7а может содержать, например, спинку гребня и несколько зубьев 8а, причем зубья 8а подвижного гребенчатого электрода 7а проходят в положительном направлении (x) отклонения, то есть в положительном направлении х. Подвижный гребенчатый электрод 7а и неподвижный гребенчатый электрод 3a расположены в качестве погружаемых электродов. Таким образом, зубья 8а подвижного электрода 7а и зубья 4а неподвижного гребенчатого электрода 3a входят с зацеплением друг в друга. Зубья 8а и 4а могут, например, входить с зацеплением друг в друга таким образом, что при рассмотрении в направлении у происходит постоянное чередование зуба 8а подвижного гребенчатого электрода 7а и зуба 4а неподвижного гребенчатого электрода 3a.
Например, для каждого неподвижного гребенчатого электрода 3a может быть предусмотрен один подвижный гребенчатый электрод 7а.
Аналогично этому пробная масса 6 может содержать по меньшей мере один дополнительный подвижный с пробной массой 6 гребенчатый электрод 7b. Например, для каждого дополнительного неподвижного гребенчатого электрода 3b может быть предусмотрен один дополнительный подвижный гребенчатый электрод 7b.
Также и дополнительный подвижный гребенчатый электрод 7b содержит спинку гребня и множество зубьев 8b, причем зубья 8b дополнительного подвижного гребенчатого электрода 7b проходят в отрицательном направлении x, то есть в направлении, противоположном положительному направлению (x) отклонения.
Аналогично приведенным выше исполнениям в отношении неподвижных гребенчатых электродов 3a и подвижных гребенчатых электродов 7а зубья 8b дополнительного подвижного гребенчатого электрода 7b и зубья 4b дополнительного неподвижного гребенчатого электрода 4b также могут входить с зацеплением друг в друга.
Зубья описанных выше гребенчатых электродов входят с зацеплением друг в друга, например, таким образом, что они при нахождении датчика ускорения в состоянии покоя не касаются друг друга. Предпочтительно в положительном и отрицательном направлениях x между зубьями должно быть обеспечено достаточное пространство, так что при движении отклонения пробной массы 6 не происходит соприкосновения соответствующих гребенчатых электродов.
Конструкция погружаемых электродов или входящих друг в друга с зацеплением электродов имеет то преимущество, что прикладываемое к электродам напряжение возврата в исходное состояние является в дальних областях приблизительно линейным относительно отклонения пробной массы 6. Для обеспечения этой линейности, например, предпочтительно оставлять достаточное расстояние в направлении x между входящими друг в друга с зацеплением гребенчатыми электродами для того, чтобы в существенной мере подавить нелинейные эффекты плоского конденсатора между остриями зубьев и противолежащими спинками гребней и, следовательно, сделать их несущественным.
Предпочтительно датчик ускорения заполнен газом под заданным давлением. Таким образом, между зубьями гребенчатых электродов находится газ или, говоря точнее, молекулы газа. Если во время движения отклонения пробной массы 6 теперь, например, один подвижный гребенчатый электрод 7а движется в направлении неподвижного гребенчатого электрода 3a, газ должен выходить из промежуточных пространств зубьев. Это обеспечивает определенное «пневматическое демпфирование» колебания или движения отклонения пробной массы 6.
Под определением пневматического демпфирования далее следует понимать, таким образом, демпфирование за счет увеличения или уменьшения частичного объема, причем газ протекает, например, из уменьшающегося частичного объема в увеличивающийся частичный объем. При этом возникает разница в давлениях между частичными объемами, так как газ вследствие своей вязкости лишь наконец быстро может перетекать от одного частичного объема в другой частичный объем. Тем самым, присутствующее в уменьшающемся частичном объеме избыточное давление ведет к воздействию силы на наружные стенки уменьшающегося частичного объема. Происходит демпфирование движения отклонения или колебания, поскольку существует противодействующая сила, которая противодействует движению отклонения пробной массы 6.
Пневматическое демпфирование, которое вызвано изменяющимся объемом между зубьями гребенчатых электродов, что оказывается недостаточным для достижения желаемого высокого эффекта демпфирования.
По этой причине в случае датчика ускорения настоящего изобретения предусмотрены дополнительные экранирующие электроды 9а, которые повышают пневматическое демпфирование пробной массы 6. Экранирующие электроды 9а предпочтительно аналогично противоположным электродам 2а неподвижно укреплены на подложке 1, так что отклонение пробной массы 6 осуществляется относительно экранирующих электродов 9а. Экранирующие электроды 9а могут быть расположены, например, таким образом, что поверхность экранирующих электродов 9а ориентирована в направлении подвижных гребенчатых электродов 7а пробной массы 6. Говоря точнее, экранирующие электроды 9а могут иметь поверхность, которая в основном параллельна поверхности спинки гребня подвижных гребенчатых электродов 7а и расположена напротив нее. При этом поверхность экранирующих электродов и поверхность гребенчатых электродов могут быть расположены, например, в целом перпендикулярно положительному направлению (x) отклонения. Таким образом, во время движения отклонения пробной массы 6 поверхность спинки гребня перемещается к поверхности экранирующих электродов, что в результате уменьшающегося объема между экранирующим электродом 9а и подвижным гребенчатым электродом 7а обеспечивает увеличение пневматического демпфирования движения отклонения пробной массы 6.
Далее, для увеличения демпфирования пробной массы 6 предусмотрены также расположенные позади спинок гребней дополнительных подвижных гребенчатых электродов 3b дополнительные экранирующие электроды 9b. А именно, указанный по меньшей мере один дополнительный подвижный гребенчатый электрод 3b может содержать поверхность спинки гребня, которая является в целом перпендикулярной положительному направлению (x) отклонения. Далее, дополнительный экранирующий электрод 9b содержит поверхность экранирующего электрода, которая в целом параллельна поверхности спинки гребня дополнительного подвижного гребенчатого электрода 3b, причем поверхность экранирующего электрода и поверхность спинки гребня расположены напротив друг друга. При движении отклонения пробной массы 6 происходит уменьшение расстояния между поверхностью спинки гребня и поверхностью экранирующего электрода. Тем самым также и дополнительные экранирующие электроды 9b способствуют пневматическому демпфированию движения отклонения или колебания.
Как показано на фиг. 1, могут быть предусмотрены также комбинированные экранирующие электроды, которые одновременно выполняют функцию как экранирующих электродов 9а, так и дополнительных экранирующих электродов 9b. Тем самым экранирующие электроды 9а и дополнительные экранирующие электроды 9b могут быть соединены друг с другом с образованием цельной конструкции. Эти комбинированные экранирующие электроды могут содержать, например, две параллельные поверхности экранирующих электродов, причем одна из поверхностей экранирующего электрода может быть расположена напротив поверхности спинки гребня дополнительного подвижного гребенчатого электрода 7а, а другая из поверхностей экранирующего электрода может быть расположена напротив поверхности спинки гребня дополнительного подвижного гребенчатого электрода 7b. Таким образом, комбинированный экранирующий электрод может эффективно демпфировать движения отклонения пробной массы 6 как в положительном, так и в отрицательном направлениях x.
Фиг. 2 показывает схематический вид сверху следующего примера исполнения соответствующего изобретению датчика ускорения. Показанный на фиг. 2 датчик ускорения содержит в целом те же элементы, что и изображенный на фиг. 1 датчик ускорения, причем одинаковые элементы оснащены одинаковыми ссылочными обозначениями.
На фиг. 2 схематически проиллюстрированы возможности электрического подключения соответствующих электродов. При этом может быть предусмотрено электрическое присоединение 11а для пробной массы 6 или для подвижных гребенчатых электродов 7а или дополнительных подвижных гребенчатых электродов 7b. Далее, могут быть предусмотрены электрические присоединения 11b для противоположных электродов 2а и дополнительных противоположных электродов 2b или для соответствующих неподвижных гребенчатых электродов 3a и дополнительных неподвижных гребенчатых электродов 3b.
В режиме "Closed Loop" с помощью электрического присоединения 11а пробной массы 6 и электрических присоединений 11b противоположных электродов 2а или дополнительных противоположных электродов 2b можно регистрировать отклонение пробной массы и с помощью соответствующей цепи регулирования прикладывать напряжение возврата в исходное положение, которое ведет к возврату пробной массы в свою исходную позицию.
Если эксплуатация датчика ускорения происходит в режиме "Open Loop", то с помощью электрических присоединений 11а или 11b можно измерять изменение емкости, на основании которого может быть рассчитано ускорение датчика ускорения.
Далее, могут быть предусмотрены электрические присоединения 11с для экранирующих электродов 9а или для дополнительных экранирующих электродов 9b. Через электрические присоединения 11с экранирующие электроды 9а или дополнительные экранирующие электроды 9b могут быть подключены к общему электрическому потенциалу. Для этого электрические присоединения 11с экранирующих электродов 9а и дополнительных экранирующих электродов 9b могут быть, например, соединены между собой.
К тому же экранирующие электроды 9а или дополнительные экранирующие электроды 9b могут быть подключены через свои электрические присоединения 11с к тому же, что и для пробной массы 6, потенциалу. Если экранирующие электроды и пробная масса 6 подключены к одному и тому же электрическому потенциалу, то и экранирующие электроды и соответствующие подвижные гребенчатые электроды 7а или дополнительные подвижные гребенчатые электроды 7b подключены к одному и тому же потенциалу. Это ведет к тому, что не возникают нежелательные электростатические силы между экранирующими электродами 9а или дополнительными экранирующими электродами 9b и соответствующими противолежащими подвижными гребенчатыми электродами 7а или дополнительными подвижными гребенчатыми электродами 7b. Фиг. 3 показывает схематический вид сверху следующего примера исполнения соответствующего изобретению датчика ускорения. Показанный на фиг. 3 датчик ускорения содержит в целом те же элементы, что и изображенный на фиг. 1 датчик ускорения, причем одинаковые элементы оснащены одинаковыми ссылочными обозначениями.
В случае изображенного на фиг. 3 датчика ускорения экранирующие электроды 9а или дополнительные экранирующие электроды 9b механически соединены через множество изоляционных слоев 12 с соответствующими противоположными электродами 2а или дополнительными противоположными электродами 2b. Таким образом, экранирующие электроды 9а и противоположные электроды 2а образуют интегральную структуру, что существенно повышает стабильность конструкции. Тем самым возможно, например, исполнение экранирующих электродов 9а более узкими, нежели в примере исполнения по фиг. 1. Изоляционный слой 12 является предпочтительным для электрической изоляции между собой экранирующих электродов 9а и противоположных электродов 2а. Такая электрическая изоляция целесообразна, например, в частности, в том случае, если экранирующие электроды 9а, 9b и пробная масса подключены к одному электрическому потенциалу.
Для регулировки силы обусловленного экранирующими электродами 9а, 9b демпфирования представляются возможными, например, две возможности, которые могут комбинироваться между собой любым образом.
Так, например, в процессе изготовления или после процесса изготовления производится такая настройка давления газа (или давления наполнения или внутреннего давления) датчика ускорения, при которой обеспечивается оптимальное демпфирование пробной массы 6. При этом сила пневматического демпфирования при обычных давлениях газа (или давлениях заполнения) может возрастать с повышением давления газа. При более высоких давлениях газа демпфирование не зависит от давления газа. Существует оптимальная величина, так как сила демпфирования не должна быть ни слишком высокой, ни слишком низкой.
Далее, в процессе изготовления или уже в процессе отделки расстояние между подвижными гребенчатыми электродами 7а (или дополнительными подвижными электродами 7b) и экранирующим электродом 9а (или дополнительным экранирующим электродом 9b) может быть отрегулировано таким образом, что достигается оптимальное демпфирование движения отклонения пробной массы 6. Чем меньше это расстояние, тем сильнее демпфирование при обычных для измерителей ускорения давлений заполнения (например, от 1 мбар до 1 бар).
Само собой разумеется, возможна комбинация между собой обоих названных выше способов регулировки оптимального демпфирования.
Изобретение относится к использованию экранирующих электродов 9а, 9b для увеличения демпфирования в измерителе ускорения типа MEMS. При конструктивном исполнении с погружающимися электродами (ср. фиг. 2), однако без экранирующих электродов хотя и возникают линейная характеристика и простота дизайна управления, однако возникает лишь малое демпфирование.
При вибрации это может привести к нежелательному выпрямлению. За счет использования дополнительных специально выполненных электродов (экранирующих электродов) 9а, 9b при помощи ширины зазора при данном давлении демпфирование может быть отрегулировано до достижения оптимальной величины.
В обычных конструкциях в качестве погружающихся пальцев (без экранирующих электродов) демпфирование быстро становится малым. Следствием является уменьшенная область возврата в исходное положение. Здесь величины давления газа часто выбирают высокими, чтобы добиться достаточно сильного демпфирования. Это, конечно, ведет к тому, что в результате воздействия температуры во внутреннем пространстве датчика происходят слишком высокие колебания давления и, следовательно, существует опасность механических деформаций. Для обеспечения работы, напротив, с меньшими давлениями зазоры электродов должны быть выполнены весьма малыми. В результате возникают высочайшие требования к технологии производства и, следовательно, не достигается удовлетворяющее решение.
Конструкция электродов настоящего изобретения с погружающимися пальцами, как на фиг. 1, обеспечивает при правильном исполнении почти постоянную и линейную характеристику электростатических сил в отношении отклонения в направлении x, однако с малым демпфированием. Экранирующие электроды 9а, 9b в конструкции плоского конденсатора, например, имеют потенциал той же величины, что и у подвижных гребенчатых электродов 7а, 7b, что приводит к их неэффективности в отношении действия электростатических сил, а также к нелинейности этой конструкции в отношении указанного действия сил, и по этой причине содействовать демпфированию могут только посредством заполнения газом. Следующее преимущество изобретения заключается в том, что общая активная структура (все подвижные и не подвижные части) может быть выполнена в ходе лишь одного единственного этапа DRIE-травления (глубокого реактивного ионного травления), что означает максимально возможную точность изготовления.
На фиг. 1 в качестве эскиза изображен измеритель ускорения с погружающимися электродами в соответствии с описанным здесь изобретением.
Измеритель ускорения состоит по существу из пробной массы 6, которую называют также маятником или чувствительной массой, которая может быть разделена на несущую структуру, подвижные или способные к колебаниям электроды 7а с эффективным направлением в положительном направлении x, подвижные или способные к колебаниям электроды 7b с активным направлением в отрицательном направлении x, а также траверс в виде работающих на изгиб пружин 5, посредством которых чувствительная масса 6 подвешена на закрепленных на месте опорах. Напротив подвижных электродов 7а, 7b расположены неподвижные электроды 3a, 3b. За счет приложения пригодной электростатической нагрузки маятник может постоянно удерживаться в своей позиции покоя. В этой простой конструкции функция распознавания позиции маятника (датчика перемещения) и возврат в исходное состояние объединены в одной системе электродов. Эта функциональность могла бы быть также разделена.
Подвижный маятник 6 выполнен из несущей структуры, действующей в позитивном направлении x группы 7а электродов, действующей в отрицательном направлении x группы 7b электродов, а также пружин 5 изгиба, которые соединяют подвижную структуру к неподвижному анкеру. Напротив подвижных электродов 7а, 7b расположены неподвижные электроды 3a, 3b. Последние служат для обеспечения возможности приложения электростатических сил к подвижной структуре 6 при пригодном нагружении электрическим напряжением. Неподвижные электроды 3a, 3b и нанесенные на подвижную структуру 6 подвижные электроды 7а, 7b перемежающимся образом входят друг в друга. При этом следует обратить внимание на то, чтобы между концом головки отдельного зуба электрода и концом основания противолежащего зуба оставалось достаточное свободное пространство с тем, чтобы действие плоского конденсатора и, следовательно, его нелинейность оставались второстепенными.
Между задней стороной неподвижных электродов 3a, 3b и задними сторонами подвижных электродов 7а, 7b введены экранирующие электроды 9а, 9b. Предпочтительно, они подключены к такому же, но отдельному потенциалу, как подвижные электроды 7а, 7b. За счет этого предотвращают ослабление электростатических сил в желаемых направлениях с помощью действующих на задних сторонах электродов сил противодействия. При этом важный аспект заключается в том, что эти экранирующие электроды 9а, 9b за счет их больших поверхностей, например, между экранирующим электродом 9а и подвижным гребенчатым электродом 7а, а также конструкцией плоского конденсатора выполнены с возможностью использования в качестве демпфирующего элемента.
Демпфирование может быть оптимально отрегулировано за счет размера зазора между экранирующим электродом 9а, 9b и подвижными электродами 7а, 7b, а также за счет давления газа. Преимущество, выраженное в достижении без проблем высоких величин демпфирования, и преимущества обычной конструкции электродов с погружаемыми электродами без экранирующих электродов 9а, 9b, а именно незначительная нелинейность и незначительное выпрямление вибрации, объединены с введением экранирующих электродов 9а, 9b в соответствии с фиг. 1.
В зависимости от способа изготовления возможно также объединение экранирующих электродов 9а, 9b и неподвижных электродов 3a, 3b в одну комбинированную структуру. В этом случае между экранирующими электродами 9а, 9b и электродами 3a, 3b обеспечивают, например, изоляционный слой, например оксидный слой. Это же справедливо для случая, если экранирующие электроды 9а, 9b и электроды 3a, 3b должны образовывать единый блок. При этом преимущество могло бы заключаться в возможности выполнения экранирующих электродов 9а, 9b отчетливо более тонкими, так как жесткость структуры уже обеспечена электродами 3a, 3b. Таким образом, в этом примере исполнения большая часть потребной площади для экранирующих электродов 9а, 9b является необоснованной, включая соответствующий зазор.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТВЕРДОТЕЛЬНЫЙ ДАТЧИК ЛИНЕЙНЫХ УСКОРЕНИЙ | 2018 |
|
RU2692122C1 |
| Твердотельный датчик линейных ускорений | 2020 |
|
RU2746112C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДАТЧИК УСКОРЕНИЯ | 2009 |
|
RU2401431C1 |
| ДАТЧИК УСКОРЕНИЯ | 1991 |
|
RU2014619C1 |
| ЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО КОММУТАЦИОННОЙ АППАРАТУРЫ | 2006 |
|
RU2423750C2 |
| Датчик линейных ускорений | 1983 |
|
SU1138747A1 |
| БАЗОВЫЙ ЭЛЕМЕНТ, ИМЕЮЩИЙ МНОЖЕСТВО ПРОВОДЯЩИХ ЗОН | 2008 |
|
RU2445254C2 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ДАТЧИКА | 2025 |
|
RU2840118C1 |
| ДАТЧИК ЭЛЕКТРИЧЕСКОГО ПОЛЯ ДЛЯ РАБОТЫ В МОРСКОЙ СРЕДЕ | 2007 |
|
RU2402029C2 |
| Способ калибровки датчика ускорения и датчик ускорения | 1990 |
|
SU1828547A3 |

Изобретение относится к датчику ускорения и способу изготовления такого датчика ускорения. Датчик ускорения содержит подложку с поверхностью подложки и пробную массу, которая выполнена с возможностью перемещения относительно подложки в направлении (x) отклонения, по существу параллельном поверхности подложки первом направлении (x). Пробная масса содержит гребенчатый электрод, выполненный с возможностью перемещения вместе с пробной массой и содержащий несколько зубьев, которые проходят в первом направлении (x). Датчик ускорения содержит, кроме того, противоположный электрод, неподвижно соединенный с подложкой и содержащий неподвижный гребенчатый электрод, а неподвижный гребенчатый электрод содержит несколько зубьев, которые проходят в направлении, противоположном первому направлению (x). Зубья подвижного гребенчатого электрода входят в зацепление с зубьями неподвижного гребенчатого электрода. Датчик ускорения содержит, кроме того, экранирующий электрод, неподвижно соединенный с подложкой и выполненный с возможностью увеличения демпфирования пробной массы во время движения отклонения пробной массы. Технический результат – увеличение демпфирования движения отклонения пробной массы. 2 н. и 7 з.п. ф-лы, 3 ил.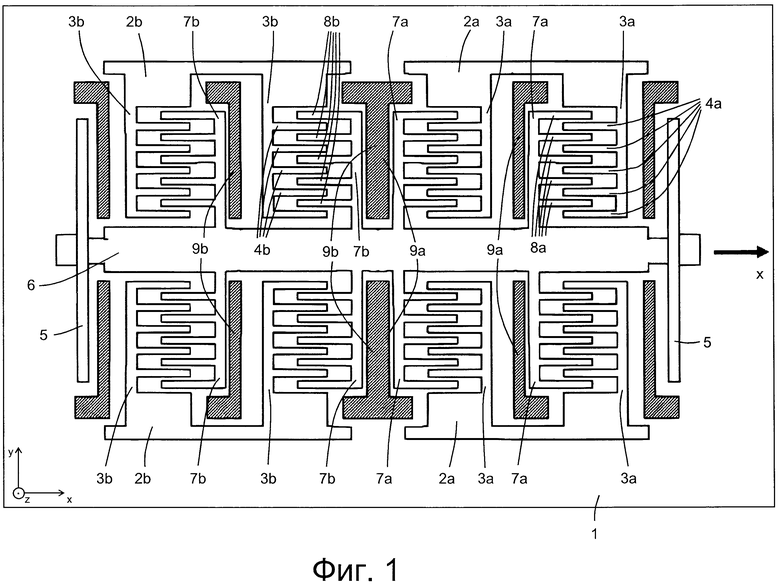
1. Датчик ускорения, содержащий
подложку (1), которая содержит поверхность подложки;
пробную массу (6), которая выполнена с возможностью перемещения относительно подложки (1) в направлении (x) отклонения, по существу параллельном поверхности подложки, причем пробная масса (6) содержит подвижный гребенчатый электрод (7а), выполненный с возможностью перемещения вместе с пробной массой, а подвижный гребенчатый электрод (7а) содержит множество зубьев (8а), которые проходят в положительном направлении (x) отклонения;
противоположный электрод (2а), неподвижно соединенный с подложкой (1), причем противоположный электрод (2а) содержит неподвижный гребенчатый электрод (3а), содержащий множество зубьев (4а), которые проходят в направлении, противоположном положительному направлению (x) отклонения, причем зубья (8а) подвижного гребенчатого электрода (7а) и зубья (4а) неподвижного гребенчатого электрода (3а) входят в зацепление друг с другом; и
экранирующий электрод (9а), неподвижно соединенный с подложкой (1) и выполненный с возможностью увеличения пневматического демпфирования пробной массы (6) во время движения отклонения пробной массы (6), в котором
подвижный гребенчатый электрод (7а) содержит спинку гребенки с поверхностью спинки гребенки, которая в целом перпендикулярна положительному направлению (x) отклонения;
экранирующий электрод (9а) содержит поверхность экранирующего электрода, которая в целом параллельна поверхности спинки гребенки;
поверхность спинки гребенки и поверхность экранирующего электрода расположены напротив друг друга;
во время движения отклонения пробной массы (6) происходит изменение расстояния между поверхностью спинки гребенки и поверхностью экранирующего электрода; причем
изменение расстояния обеспечивает увеличение пневматического демпфирования пробной массы (6).
2. Датчик ускорения по п. 1,
характеризующийся тем, что
пробная масса (6) и экранирующий электрод (9а) имеют один и тот же электрический потенциал.
3. Датчик ускорения по п. 1 или 2,
характеризующийся тем, что
противоположный электрод (2а) и экранирующий электрод (9а) механически соединены друг с другом через изоляционный слой (12).
4. Датчик ускорения по п. 1 или 2,
характеризующийся тем, что
пробная масса (6) содержит дополнительный подвижный гребенчатый электрод (7b), выполненный с возможностью перемещения вместе с пробной массой (6) и содержащий множество зубьев (8b), которые проходят в направлении, противоположном положительному направлению (x) отклонения;
датчик ускорения содержит дополнительный противоположный электрод (2b), неподвижно соединенный с подложкой (1) и содержащий дополнительный неподвижный гребенчатый электрод (3b), причем дополнительный неподвижный гребенчатый электрод (3b) содержит множество зубьев (4b), которые проходят в положительном направлении (x) отклонения, а зубья (8b) дополнительного подвижного гребенчатого электрода (7b) и зубья (4b) дополнительного неподвижного гребенчатого электрода (3b) входят с зацеплением друг в друга; и
датчик ускорения содержит дополнительный экранирующий электрод (9b), который неподвижно соединен с подложкой (1) и
выполнен с возможностью увеличения пневматического демпфирования пробной массы (6) во время движения отклонения пробной массы (6).
5. Датчик ускорения по п. 4,
характеризующийся тем, что
экранирующий электрод (9а) и дополнительный экранирующий электрод (9b) соединены друг с другом с образованием цельной конструкции.
6. Датчик ускорения по п. 1 или 2,
характеризующийся наличием
пружинного элемента (5), который соединяет между собой пробную массу (6) и подложку (1) с обеспечением возможности отклонения пробной массы (6) в положительном направлении (x) отклонения и обеспечением в целом жесткого крепления пробной массы (6) в направлении (y), перпендикулярном положительному направлению (x) отклонения и параллельном поверхности подложки.
7. Способ изготовления датчика ускорения, включающий следующие этапы:
изготовление подложки (1), которая содержит поверхность подложки;
изготовление пробной массы (6), которая выполнена с возможностью перемещения относительно подложки (1) в положительном направлении (x) отклонения, которое в целом параллельно поверхности подложки, причем пробная масса (6) содержит подвижный гребенчатый электрод (7а), выполненный с возможностью перемещения вместе с пробной массой (6), а подвижный гребенчатый электрод (7а) содержит множество зубьев (8а), которые проходят в положительном направлении (x) отклонения;
изготовление противоположного электрода (2а), неподвижно соединенного с подложкой (1), причем противоположный электрод (2а) содержит неподвижный гребенчатый электрод (3а), который содержит множество зубьев (4а), проходящих в направлении, противоположном положительному направлению (x) отклонения, причем зубья (8а) подвижного гребенчатого электрода (7а) и зубья (4а) неподвижного гребенчатого электрода (3а) входят в зацепление друг с другом; и
изготовление экранирующего электрода (9а), который неподвижно соединен с подложкой (1) и выполнен с возможностью увеличения пневматического демпфирования пробной массы (6) во время движения отклонения пробной массы, причем
подвижный гребенчатый электрод (7а) содержит спинку гребенки с поверхностью спинки гребенки, которая в целом перпендикулярна положительному направлению (x) отклонения;
экранирующий электрод (9а) содержит поверхность экранирующего электрода, которая в целом параллельна поверхности спинки гребенки;
поверхность спинки гребенки и поверхность экранирующего электрода расположены напротив друг друга;
во время движения отклонения пробной массы (6) происходит изменение расстояния между поверхностью спинки гребенки и поверхностью экранирующего электрода и
изменение расстояния обеспечивает увеличение пневматического демпфирования пробной массы (6).
8. Способ изготовления датчика ускорения по п. 7,
характеризующийся тем, что
способ предусматривает дополнительно:
настройку давления газа датчика ускорения с обеспечением регулировки оптимального демпфирования движения отклонения пробной массы (6).
9. Способ изготовления датчика ускорения по п. 7 или 8,
характеризующийся тем, что
способ предусматривает дополнительно:
подбор расстояния между подвижным гребенчатым электродом (7а) и экранирующим электродом (9а) при заданном давлении газа датчика ускорения с обеспечением регулировки оптимального демпфирования движения отклонения пробной массы (6).
| DE 102011083487 A1, 28.03.2013 | |||
| US 20060208327 A1, 21.09.2006 | |||
| US 20020178818 A1, 05.12.2002 | |||
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ЕМКОСТНОГО АКСЕЛЕРОМЕТРА | 1996 |
|
RU2098832C1 |
| Электростатический акселерометр | 1981 |
|
SU1308206A3 |

