Изобретение относится к акселерометрам, в которых измерение ускорения производится на основании усилии необходимых для удержания инерционного элемента в состоянии покоя или подаче назад в положение определяемое относительно корпуса устройства, в частности к акселерометрам, где эти усилия вырабатываются электростатически,и направлено на их улучшение с точки зрения повьппения их точности
Цель изобретения - повышение точности измерения.
На фиГо изображена блок-схема акселерометраJ Н4 фиг. 2 - для определения положения инерционного элемента; на фиг. Зи 4- блоки компенсации переменной составляющей потенциала инерционного элемента; на фиг, 5 - блок компенсации постоянной сое тавляющей потенциала инерционного элмента; на фиГ(, 6 - вычислительная схема S
На фиг,1 обозначен инерционный элемент 1 и электроды акселерометра. Инерционный элемент выполнен сферическим (в виде mapaj и плавает в корпусе (не показан;, Три пары полюсных электродовJ расположенных в корпусе вместе с измерительным элементом (шаром), создают последовательность емкостей (конденсаторов).Каждый электрод играет роль как электрода определения положения, так и Электрода контроля положения. На фиг.1 показаны оба электрода 2 и 3 в одной паре.
Электроды 2 и 3.соединены со схемой 4 определения положения Эта схе
R
емкостей () между инерционным элементом и электродами 2 и 3, а также величину (С + С) - С(, где известная емкостная величина.
Разностный сигнал (С,-Сг.) подается на схему 5 для выработки сигналов контроля расположения„ Сигналы контроля расположения, выработанные схемой 5f подаются на электроды 2 и 3. Эти сигналы могут быть либо постоянными, либо переменными.
Величина (С,+С,,) - С, передается на вычислительную схему 6, которая выдает измеренную величину ускорения на блок 7 индикации.
Электрод 3 в электродной системе акселерометра соединен со схемой 8 для компенсации переменной состав
ляющей потенциала инерционного элемента. Выход схемы 8 соединен с электродами 9 и 10.
Если сигнал контроля положения переменный, то необходима вторая схема 1 для компенсации переменной составляющей потенциала инерционного элемента, причем эта схема идентична схеме 8, но работает на другой частоте. Ее вход подсоединяется к электроду 12, а выходы - к электродам 13 и 14, Вибрирующий электрод 15 в электродной системе акселерометра составляет часть схемы 16 компенсации постоянной составляющей потенциала инерционного элемента. Вход схемы 16 соединен с электродами 2 и 3 определения положения и контро-. ля положения, а выходы с теми же электродами,
На фиг о 2 представлена измерительная схема 4 сигнала определения положения, содержащая инерционньш элемент (шар) 1 и электроды 2 и 3, создающие емкости С, и С с шаром 1, а также часть кожуха, не снабженную электродами, создающую емкость CQ с шаром, которая значительно больще, чем С, и С.
Электроды 2 и 3 соединены посредством конденсаторов 17 и 18 с клеммами вторичной обмотки дифференциального трансформатора 19, На первичную
обмотку дифференциального трансформатора подается напряжение от источника 20 переменного напряжения с угловой частотой СО . Средняя точка 21 вторичной обмотки дифференциального трансформатора 19 соединена с одной из клемм вторичной обмотки второго дифференциального трансформатора 22. Другая клемма вторичной обмотки дифференциального трансформатора 22 заземлена посредством конденсатора 23 известной емкости С, , Первичная обмотка дифференциального трансформатора 22 соединена с источником 24 переменного тока с угловой частотой о .
Средняя точка 25 дифференциального трансформатора 22 соединена с входом операционного усилителя 26 с емкостью С обратной связи. Выход этого операционного усилителя соединен с двумя синхронными детекторами 27 и 28, на которые поступают сигналы с УГЛОВЫМИ частотами О и со от соответствующих источников 20 и 2Д переменного напряжения.
Сигналы, возникающие на выходе р синхронного детектора 27, пропорциональные () t подаются на схему 5 выработки сигнала контроля положения Схема 5 в основном содержит элемент 29 коррекции и дифференциальный усилитель 30, Когда сигналы контроля положения являются переменными с частотой СО , схема содержит модулятор 31 , у которого эта высота является несущей. Выход схемы 5 сигнала контроля положения соединен с электродами 2 и 3 посредством резисторов 32 и 33.
Сигнал, возникающий на выходе р , пропорциональный величине (С,+C)-C, когда потенциал V/(o / шара на частоте со является нулевым, подается на вычислительную схему 6.
Для исключения любых погрешностей при измерении ускорения, вносимых паразитными емкостями Cpi , Ср , Срэ между электродами .и проводниками, находящимися на потенциале земли, и контроля положения окружены защитными электродами 34 и 35, Последние соединены с экраном 36, которьй также охватывает источники переменного напряжения и трансформаторы и соединен со средней точкой 25 вторичной обмотки трансформатора 22 и с одним входом операционного усилителя 26.
Если е представляет собой амплитуду на клеммах вторичной обмотки дифференциальных трансформаторов 19 и 22, то входньте сигналы на схему 4 измерения сигналов определения положения могут быть записаны в виде:
р с, -С, е ; (1)
С.Ге;
,р (С,+ С) - - (С, - С.) . V (со ).
(2) (3)
где V(Q ) -5l4-- -e .
Со 2: С, 1 .
V/co / имеет отношение к амплитуде составляющей потенциала инерционного элемента на частоте со .
Равенство (2) для р содержит паразитную величину V((j ), поэтому необходимо предпринять меры для исклю5. 5
, 20
, 35
40
45
25
50
«
чения постоянного потенциала V и потенциала V/coV при угловой частоте to инерционного элемента. Если к тому же сигналы контроля положения являются переменными с частотой ОЭ- , то потенциал инерционного элемента на этой частоте также должен быть исключен.
Целью схем 8, 11 и (б является устранение этих потенциалов за счет сведения к нулю,
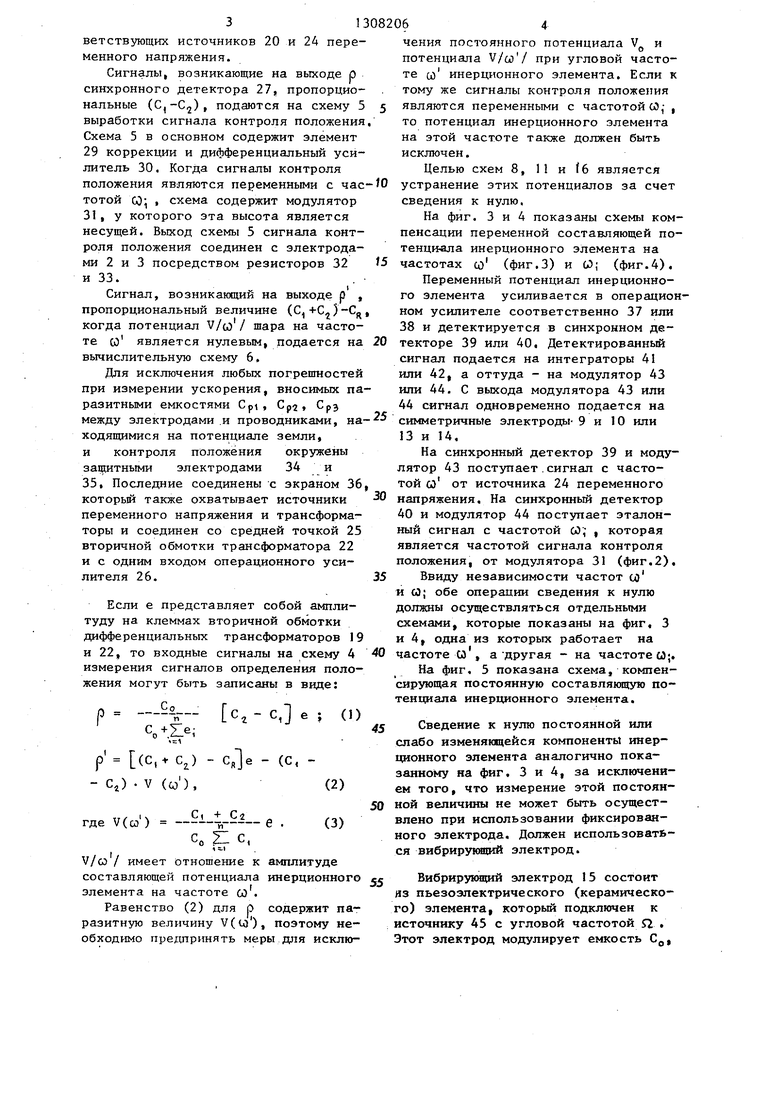
На фиг. 3 и 4 показаны схемы компенсации переменной составляющей потенциала инерционного элемента на частотах со (фиг.З) и (0; (фиг.4),
Переменный потенциал инерционного элемента усиливается в операционном усилителе соответственно 37 или 38 и детектируется в синхронном детекторе 39 или 40. Детектированньй сигнал подается на интеграторы 41 или 42, а оттуда - на модулятор 43 или 44. С выхода модулятора 43 или 44 сигнал одновременно подается на симметричные электроды- 9 и 10 или 13 и 14.
На синхронный детектор 39 и модулятор 43 поступает .сигнал с частотой со от источника 24 переменного напряжения. На синхронный детектор 40 и модулятор 44 поступает эталонный сигнал с частотой СО, , которая является частотой сигнала контроля положения, от модулятора 31 (фиг.2),
Ввиду независимости частот со и СО; обе операции сведения к нулю должны осуществляться отдельными схемами, которые показаны на фиг, 3 и 4, одна из которых работает на частоте Са , а другая - на частоте ей;.
На фиг. 5 показана схема, компенсирующая постоянную составляклцую потенциала инерционного элемента.
Сведение к нулю постоянной шш слабо изменяющейся компоненты инерционного элемента аналогично показанному на фиг. 3 и 4, за исключением того, что измерение этой постоянной величины не может быть осуществлено при использовании фиксированного электрода. Должен использоваться вибрирукйций электрод.
Вибрирукиций электрод 15 состоит из пьезоэлектрического (керамического) элемента, который подключен к источнику 45 с угловой частотой Q . Этот электрод модулирует емкость С,,
а поэтому и потенциал V, заданный уравнением, которое принимает вид:
VQ t;
AV V
uCt
GO +Z:C;.
Потенциал t,Vg подается на электроды 2 и 3| усиливается операционным усилителем 46 и детектируется синхронным дете,ктором 47. Детектированный сигнал подается на интегратор 48, а оттуда - на усилитель 49. Выходной сигнал с последнего подается на
валентные величины V , V, , относительно других пар электродов возводятся в квадрат в блоках 54 и 55 возведения и других (не показаны), а полученные таким образом квадраты умножаются на VC, до v С в умножителях от 56 до 61 с тем, чтобы получились величины oTVCj (V ) до VCg (V,).
20
25
дующие сложения:
vc,/v,/ +
VC,/Vj/ + ,,/ ; VCy/Vj/ + VCfe/V,/S
a сигналы, выходящие из этих сумматоров, являются составляющими соответственно FJ,, Ь ц и F электростатической силы F,
Формула Изобрет. ения
электроды 2 и 3 детектирования поло- 15 Сумматоры 62-64 осуществляют слежения и контроля положения, Так как в трехмерном акселерометре имеется три пары электродов определения положения и контроля положения, то одна из этих пар спужят также для устранения постоянного потенциала инерционного элемента.
На фиг,6 показана вычислительная схема 6. На эту схему поступают следующие сигналы: сигналы определения положения р п (фиг.2); сигналы контроля положения V,, V (фиг.2), иду- гцие на электроды 2 и 3 а также другие сигналы определения положения и контроля положения, идущие от электродов и направляющиеся к парам электродов относительно других координатных осей.
Поперечное сечение электрода предполагается весьма малым, так что конденсаторы электрод - шар могут быть сравнимы с плоскими конденсаторами с емкостью, заданной уравнением
( Х
30
1
(6)
35
40
Электростатический акселерометр, содержащий кожух с расположенным в нем .инерционным элементом в виде шара, систему электродов, расположенную в соответствии с координатными осями и образующую электростатический подвес, схему определения положения шара, содержащую первый емкостный мост конденсаторы которого соединены с вторичной обмоткой первого дифференциального трансформатора, первичная обмотка которого подключена к источнику переменного напряжения, операционный усилитель с емкостью в цепи обратной связи, выход которого соединен с одним из входов . синхронного детектора, второй вход которого соединен с источником переменного напряжения, а вход подключен к одному из электродов, схему контроля положения шара, содержащую элемент коррекции, вход которого соединен с выходом синхронного детектора, а выход - с последовательно соединенными дифференциальным усилителем и модулятором, и блок индикации.
где
g диэлектрическая постоянная; (S - площадь поверхности, X - переменная высота конденсатора.
После дифференцирования уравнения (6) относительно X получается следующее уравнение:
9 Ci с; Тх EG
(7)
Электростатический акселерометр, содержащий кожух с расположенным в нем .инерционным элементом в виде шара, систему электродов, расположенную в соответствии с координатны ми осями и образующую электростатический подвес, схему определения по ложения шара, содержащую первый емкостный мост конденсаторы которого соединены с вторичной обмоткой первого дифференциального трансформато ра, первичная обмотка которого подключена к источнику переменного нап ряжения, операционный усилитель с е костью в цепи обратной связи, выход которого соединен с одним из входов . синхронного детектора, второй вход которого соединен с источником пере менного напряжения, а вход подключен к одному из электродов, схему контроля положения шара, содержащую элемент коррекции, вход которого со динен с выходом синхронного детекто ра, а выход - с последовательно сое диненными дифференциальным усилителем и модулятором, и блок индикации
Блок 50 позволяет вычислить разность (C,-Cj),B то время как блок 51 вычисляет сумму (С,+0) .Сумматор-вы- .атт,кр1ся тем, что, читатель 5-2 выдает сигналы, представс целью повышения точности измерения, в него введены 1второй емкостны мост, второй дифференциальный транс форматор, одна из клемм вторичной о
ляющие С, и Cj, Эти сигналы возводятся в квадрат в блоке 53 возведения. Полученные таким образом сигналы
пропорциональны VC, , VC и эквивалентным величинам VC, VC, C и VCg относительно других пар электродов.
Величины V, и V
7
а также экви- Vj и V,
валентные величины V , V, , относительно других пар электродов возводятся в квадрат в блоках 54 и 55 возведения и других (не показаны), а полученные таким образом квадраты умножаются на VC, до v С в умножителях от 56 до 61 с тем, чтобы получились величины oTVCj (V ) до VCg (V,).
Сумматоры 62-64 осуществляют сле
дующие сложения:
vc,/v,/ +
VC,/Vj/ + ,,/ ; VCy/Vj/ + VCfe/V,/S
a сигналы, выходящие из этих сумматоров, являются составляющими соответственно FJ,, Ь ц и F электростатической силы F,
Сумматоры 62-64 осуществляют слеФормула Изобрет. ения
30
35
40
Электростатический акселерометр, содержащий кожух с расположенным в нем .инерционным элементом в виде шара, систему электродов, расположенную в соответствии с координатными осями и образующую электростатический подвес, схему определения положения шара, содержащую первый емкостный мост конденсаторы которого соединены с вторичной обмоткой первого дифференциального трансформатора, первичная обмотка которого подключена к источнику переменного напряжения, операционный усилитель с емкостью в цепи обратной связи, выход которого соединен с одним из входов . синхронного детектора, второй вход которого соединен с источником переменного напряжения, а вход подключен к одному из электродов, схему контроля положения шара, содержащую элемент коррекции, вход которого соединен с выходом синхронного детектора, а выход - с последовательно соединенными дифференциальным усилителем и модулятором, и блок индикации
50
.атт,кр1ся тем, что,
.атт,кр1ся тем, что,
с целью повышения точности измерения, в него введены 1второй емкостный мост, второй дифференциальный трансформатор, одна из клемм вторичной обмотки которого заземлена через введенный конденсатор, а другая клемма вторичной обмотки соединена со средней точкой вторичной обмотки первого дифференциального трансформатора второй источник переменного напряжения, соединенный с первичной обмоткой второго дифференциального трансформатора, средняя точка вторичной обмотки которого соединена с входом операционного усилителя и одним из защитных электродов, при этом вход операционного усилителя соединен с другим защитным электродом, а также второй синхронный детектор, один из входов которого соединен с вторым источником переменного напряжения, а другой вход - с выходом операционного усилителя и одним из входов первого синхронного детектора, а также вычислительная схема, подключенная к блоку индикации и включающая блоки вычитания и сложения,входы которых соединены с выходом схемы определения положения шара, сумматор-вычита- тель, входы которого соединены с выходами блоков вычитания и сложения, блок вычисления градиента, вход ко- Voporo соединен с выходом сумматора- вычитателя, квадраторы, входы которых соединены с соответствующими электродами умножители, входы которых подключены к выходам блока вычисления градиента и выходам квадраторов , .сумматоры, входы которых соединены с выходами умножителей, а выходы - с входами блока индикации, а
также два блока компенсации переменной составляющей потенциала инертш- онного элемента, каждый из которых содержит операционный усилитель с ем- костью в цепи обратной связи, вход которого соединен с соответствующими симметричными электродами, а выход подключен к входу синхронного детектора, интегратор, вход которого соединен с выходом синхронного детектора, второй вход которого подключен к соответствующему источнику переменного напряжения, а выход - к вычислительной схеме, и модулятор, один
вход которого соединен с выходом интегратора, другой вход - с выходом второго источника переменного напряжения схемы определения положения, а выход подключен к соответствующей
паре электродов, а также блок компенсации постоянной составляющей потенциала инерционного элемента, содержащий источник питания, вход которого соединен с соответствующими электродами, синхронный детектор, один из входов которого соединен с выходом источника питания, а другой - с выходом операционного усилителя, вход которого подключен к соответствующим
электродам, интегратор, вход которого соединен с выходом синхронного детектора, а выход - с входом усилителя, выход которого подключен к соответствующим электродам, при этом выход синхронного, детектора подключен к входу вычислительной схемы.
Со
5
t:h
,
-V2
Риа.З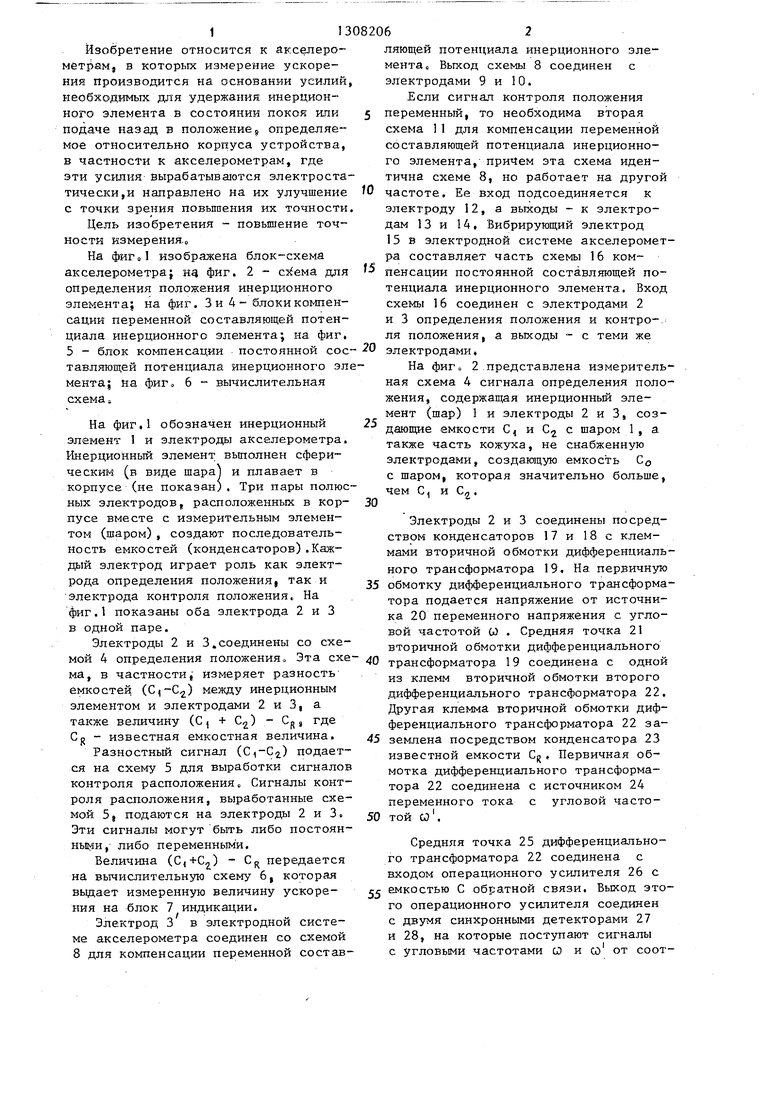



Изобретение отиосится к акселерометрам, в которых измерение ускорения производится на основании усилий, необходимых для удержания инерционного элемента в состоянии покоя. Цель изобретения - повышение- точности измерения. Устройство содержит инерционный элемент 1, электроды 2 и 3, размещенные в корпусе. Электроды 2 и 3 соединены со схемой 4 определения положения, которая измеряет разность емкостей между инерционньм элементом 1 и электродами 2 и 3, Разностный сигнал подается на схему 5 для выработки сигналов контроля расположения, которые могут быть либо постоянными, либо переменными. Электрод 3 соединен со схемой 8 для компенсации переменной составляющей потенциала инерционного элемента 1.Вибрирующий электрод 15 составляет часть схемы 16 компенсации постоянной составляющей потенциала инерционного элемента I. 6 ил. СО 00 о 00 О5
us. 4e,
Редактор М.Петрова
Составитель Н.Мараховская Техред В.Кадар
Заказ 1646/59 Тираж 777 .Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раугаская наб,, д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
фиг. 5
Корректор А.Зи юкосов
| Крестовина пересечения железнодорожных путей | 1983 |
|
SU1134655A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ПОЛУЧЕНИЯ ФОРСТЕРИТНОЙ ИЗОЛЯЦИОННОЙ ПЛЕНКИ НА ПОВЕРХНОСТИ АНИЗОТРОПНОЙ ЭЛЕКТРОТЕХНИЧЕСКОЙ СТАЛИ | 1996 |
|
RU2124055C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
