Изобретение относится к автоматизированной бортовой системе управления рельсовым транспортным средством. Далее изобретение относится к рельсовому транспортному средству. Кроме того, изобретение относится к способу автоматизированного управления транспортным средством.
Рельсовые транспортные средства содержат автоматизированные системы, основанные обычно, в основном, на согласовании инфраструктуры, т.е. сети, в которой движется рельсовое транспортное средство. С помощью этих систем принимаются меры по предохранению участков пути от мешающих объектов. Для этого используются, например, двери на перронах или датчики для контроля свободы пути на вокзалах. Кроме того, происходит существенное влияние на рельсовые транспортные средства извне. Для этого постоянные ориентиры инфраструктуры задают точки синхронизации. Обычно автоматический режим движения основан на поездной системе обеспечения безопасности с соответствующим оборудованием со стороны транспортного средства и инфраструктуры. В случае такого рода автоматизированного управления поездом всегда должна быть согласованная инфраструктура вне подлежащих управлению рельсовых транспортных средств. Если она на участке пути отсутствует, то обычно на нем не может осуществляться автономное движение.
В DE 102017101505 А1 описан способ оптимизации режима движения на основе относящихся к участку пути и положению данных, а также не относящихся к участку пути данных.
В WO 2018/104477 А1 описан способ распознавания колеи. Для распознавания колеи используется блок съемки изображений.
В DE 102012215533 А1 положение рельсового транспортного средства корректируется с помощью снимков стационарных ориентиров. Для этого предусмотрены бортовые сенсоры, с помощью которых регистрируется окружающее рельсовое транспортное средство пространство. Положение ориентиров определяется затем с помощью данных о положении из базы данных.
В Shenton R: «Video Train Positioning», IRSE AUSTRALASIA TECHNICAL MEETING, 18.03.2011 (2011-03-18), стр. 1-8, ХР003029634 описана основанная на видео одометрия с автоматизированной регистрацией положения и скорости рельсового транспортного средства с учетом кривизны кривых участка рельсового пути.
В US 2015/268172 А1 описано оптическое наблюдение за участком пути перед рельсовым транспортным средством посредством камеры, расположенной на рельсовом транспортном средстве. Снимок участка пути сравнивается с эталонным изображением, чтобы определить изменения участка пути.
В WO 2018/104454 А2 описано автоматизированное распознавание препятствий для единиц железнодорожного подвижного состава, причем распознавание объектов ограничено фрагментом изображения с проезжаемым путем, а также лежащей слева и справа от него критической зоной. Это изображение сравнивается с известной метаинформацией, а также дополнительной информацией, например, с планами участков пути или карточным материалом.
Задачей изобретения является создание автоматизированного управления рельсовым транспортным средством и соответствующего способа автоматизированного управления, которые требовали бы меньше затрат и были бы более гибкими в применении, чем обычные системы.
Эта задача решается посредством автоматизированной бортовой системы управления рельсовым транспортным средством по п. 1, рельсового транспортного средства по п. 7 и способа автоматизированного управления рельсовым транспортным средством по п. 8 формулы.
Предложенная автоматизированная бортовая система управления рельсовым транспортным средством содержит бортовой блок определения уставок заданных значений, автоматизированную поездную эксплуатационную систему, блок движения и торможения и дополнительные датчики для регистрации информации об окружающем пространстве. Автоматизированный бортовой блок определения уставок заданных значений предназначен для того, чтобы на основе высокоточного определения положения со стороны транспортного средства и высокоточных данных карты, а также данных дополнительных датчиков определять оперативные уставки заданных значений для режима регулирования и для текущего задания движения рельсового транспортного средства. Задание движения включает в себя, например, остановки и продолжительности остановок, которая должны соблюдаться во время следования рельсового транспортного средства. Под определением положения со стороны транспортного средства следует понимать независимое от инфраструктуры определение положения, причем необходимые для этого датчики установлена в рельсовом транспортном средстве.
Режим регулирования включает в себя динамическое определение заданных значений торможения и ускорения, чтобы транспортное средство двигалось в соответствии с заданием движения и ситуацией внешнего окружения. Из установленного маршрута (см. задание движения) следует статический профиль скорости. Регулирование должно, прежде всего, при соблюдении этих уставок настраивать целевую скорость транспортного средства. Дополнительно в процесс регулирования включаются динамические воздействия, например, светосигнальные установки, другие рельсовые транспортные средства на пути движения или потенциальные препятствия.
Задание движения включает в себя предварительно установленный маршрут и, при необходимости, данные графика движения по времени. Речь идет, тем самым, о задании движения, которое должно выполнить транспортное средство. Например, задание движения включает в себя указание следовать из пункта А в пункт В при соблюдении относительного графика. При этом рейс должен происходить с максимально возможной скоростью и продолжительностью остановки Х секунд. Для высокоточного определения положения могут использоваться технические компоненты, которые определяют, например, высокоточное GPS-положение (скорректированная GPS). Далее ориентиры, например мачты воздушной контактной сети, направление пути, здания и т.д., служат в качестве ориентиров согласования. В этой связи следует назвать, например, метод SLAM (одновременная локализация и построение карты). Регистрация этих признаков происходит за счет датчиков окружающего пространства на транспортном средстве. Для высокоточного определения положения происходит далее слияние измеренных данных этих компонентов. Могут использоваться высокоточные GPS-приемники, инерциальные датчики, одометрия транспортного средства и датчики окружающего пространства в подходящей для рельсового транспортного средства комбинации (слияние).
Автоматизированная поездная эксплуатационная система предназначена для того, чтобы на основе уставок заданных значений бортового блока определения уставок заданных данных формировать команды движения и торможения.
При этом на данном уровне учитывается соблюдение профиля движения. Этот профиль движения основан на данных текущего задания движения и на данных карты, которые включают в себя информацию о максимальных скоростях и расстояниях. Можно определить также особенно энергоэффективный профиль движения при соблюдении краевых условий текущего задания движения, например установленное время движения и т.д.
Блок движения и торможения предназначен для того, чтобы на основе полученных команд движения и торможения выполнять тяговые и тормозные действия.
Предпочтительно автоматизированная эксплуатация рельсового транспортного средства не требует никаких согласований с участком пути и инфраструктурой участков пути, поскольку предложенная автоматизированная бортовая система управления рельсовым транспортным средством включает в себя все необходимые для автоматизированной эксплуатации компоненты. Кроме того, бортовое расположение компонентов, необходимых для автоматизированного движения, преимущественно автономного движения, облегчает также смешанную эксплуатацию автоматизированных и управляемых вручную транспортных средств, т.е. не возникает никаких мешающих влияний за счет блоков со стороны инфраструктуры, которые управляют автоматизированным или также автономным движением.
Другим режимом эксплуатации является обмен информацией транспортными средствами между собой. Таким образом, транспортные средства могут, например, расширить свою сенсорную область обзора за счет включения в рейс данных от других рельсовых транспортных средств или других транспортных средств.
Предложенное рельсовое транспортное средство содержит предложенную автоматизированную бортовую систему управления рельсовым транспортным средством. Предложенное рельсовое транспортное средство обладает преимуществами предложенной автоматизированной бортовой системы управления рельсовым транспортным средством.
В предложенном способе автоматизированного управления рельсовым транспортным средством происходят бортовое определение положения рельсового транспортного средства и регистрация информации об окружающем рельсовое транспортное средство пространстве. Далее на основе выявленного положения и высокоточных данных карты определяются оперативные заданные уставки для режима регулирования и задания движения рельсового транспортного средства. На основе заданных уставок бортового блока определения заданных предписаний команды движения и торможения определяются посредством автоматизированной поездной эксплуатационной системы. Наконец на основе полученных команд движения и торможения выполняются тяговые и тормозные действия.
Помимо команд движения и торможения могут предупреждаться также другие участники движения. В простейшем случае это может происходить посредством сигнального колокола. Также может подаваться обратное сообщение об текущих плановых и ходовых маневрах, например с помощью светящейся ленты снаружи на транспортном средстве, которая кодирует в цвете разные состояния.
Части предложенной автоматизированной бортовой системы управления рельсовым транспортным средством могут быть выполнены преобладающим образом в виде программных компонентов. Это касается, в частности, частей блока определения уставок заданных значений и автоматизированной поездной эксплуатационной системы. В принципе, эти компоненты могут быть реализованы, однако, также отчасти, в частности если речь идет об особенно быстрых вычислениях, в виде поддерживаемого программным обеспечением аппаратного обеспечения, например FPGA (программируемая пользователем вентильная матрица) и т.п. Точно так же необходимые интерфейсы, например, если речь идет только о получении данных от других программных компонентов, могут быть выполнены в виде программных интерфейсов. Однако они могут быть выполнены также в виде аппаратных интерфейсов, которые управляются подходящей программой.
Частично программная реализация имеет то преимущество, что даже еще до сих используемые в рельсовых транспортных средствах вычислительные системы, которые могут быть, например, частью автоматизированной системы управления, например автономной или частично автономной системы управления, могут быть дооснащены простым образом за счет обновления программного обеспечения, чтобы работать предложенным образом. Следовательно, задача решается также посредством соответствующего компьютерного программного продукта с компьютерной программой, которая загружается непосредственно в память такой вычислительной системы, с сегментами, чтобы выполнить все этапы способа автоматизированного управления рельсовым транспортным средством, если компьютерная программа выполняется в вычислительной системе.
Такой компьютерный программный продукт может включать в себя помимо компьютерной программы, при необходимости, дополнительные составные части, например документацию и/или дополнительные компоненты, также аппаратные компоненты, например аппаратные ключи (донглы и т.д.) для использования программного обеспечения.
Для переноса к памяти вычислительной системы и/или для хранения в вычислительной системе может служить компьютерно-читаемая среда, например карта памяти, жесткий диск или прочий переносной или жестко встроенный носитель данных, на котором записаны считываемые вычислительным блоком и выполняемые сегменты компьютерной программы. Для этого вычислительный блок может содержать, например, один или несколько взаимодействующих между собой микропроцессоров и т.п.
Зависимые пункты формулы и нижеследующее описание содержат соответственно особенно предпочтительные варианты осуществления и модификации изобретения. При этом, в частности, пункты формулы одной категории могут быть модифицированы аналогично зависимым пунктам формулы другой категории и их частям описания. Кроме того, в рамках изобретения также различные признаки различных примеров осуществления и пункты формулы могут быть комбинированы также в новые примеры осуществления.
В одном предпочтительном варианте предложенной автоматизированной бортовой системы управления рельсовым транспортным средством бортовой блок определения предписаний заданных значений содержит один из следующих датчиков:
- блок определения положения, например на основе системы спутниковой навигации,
- инкрементальный счетчик пройденного пути,
- визуализирующую систему,
- инерциальные датчики.
Названные датчики могут использоваться преимущественно в комбинации. Комбинация датчиков позволяет компенсировать недостатки отдельных видов датчиков. Например, у счетчиков пройденного пути возникают эффекты скольжения и центрифугирования, а у спутниковых блоков определения положения – неточности при проезде туннелей или через лес. Применение инерциальных датчиков обеспечивает обнаружение направления при проезде стрелок.
В одном варианте предложенной автоматизированной бортовой системы управления рельсовым транспортным средством бортовой блок определения уставок заданных значений содержит блок согласования зарегистрированной информации датчиков с высокоточной картой участка пути. Такая высокоточная карта обеспечивает точную идентификацию релевантных признаков участка пути как в текущем положении транспортного средства, так и для дальнейшего прохождения соответствующего заданию движения маршрута.
Эти охватываемые высокоточной картой участка пути признаки могут включать в себя, по меньшей мере, часть следующей информации:
- характер участка пути,
- положения сигналов,
- положения остановок,
- ответвления.
Информация о характере участка пути включает в себя также значения градиентов подъемов и значения радиусов кривых, релевантные для выбора скорости или тяговой мощности.
В одном варианте предложенной автоматизированной бортовой системы управления рельсовым транспортным средством текущая уставка, как должно двигаться рельсовое транспортное средство, определяется на основе текущего локального положения, задания движения и хранящейся в памяти карты. Выявленное локальное положение позволяет определить текущее положение рельсового транспортного средства на хранящейся в памяти карте, а задание движения дает информацию об остановках, от которых отправляется рельсовое транспортное средство и которые также могут быть идентифицированы на хранящейся в памяти карте. Следовательно, можно определить маршрут на карте и на основе возникающих на этом маршруте релевантных признаков можно назначить уставки для режима движения рельсового транспортного средства.
Предпочтительно информация визуализирующей системы используется для определения следующей информации:
- оптическое распознавание сигналов,
- восприятие других участников движения,
- восприятие пассажиров на остановке для осуществления отправления от нее.
Предпочтительно предложенная автоматизированная бортовая система управления рельсовым транспортным средством может воспринимать также информацию из окружающего пространства и учитывать в текущем профиле движения. Для этого автоматизированная бортовая система управления рельсовым транспортным средством оборудована вышеназванными дополнительными датчиками и блоками оценки. Зарегистрированная с помощью названных блоков информация об окружающем пространстве обрабатывается сообща с остальной информацией датчиков в виде уставок заданных значений для автоматизированной поездной эксплуатационной системы. Уставки заданных значений могут включать в себя, например, уставки скорости или значения для регулирования скорости. Регулирование скорости может осуществляться с помощью автоматизированной системы, которая устанавливает скорость в зависимости от полученной информации о положении и окружающем пространстве. В качестве альтернативы также в текущей ситуации на основе информации об окружающем пространстве и о положении можно определить, как далеко может двигаться рельсовое транспортное средство в текущей ситуации.
Изобретение еще раз более подробно поясняется ниже со ссылкой на прилагаемые чертежи, на которых изображают:
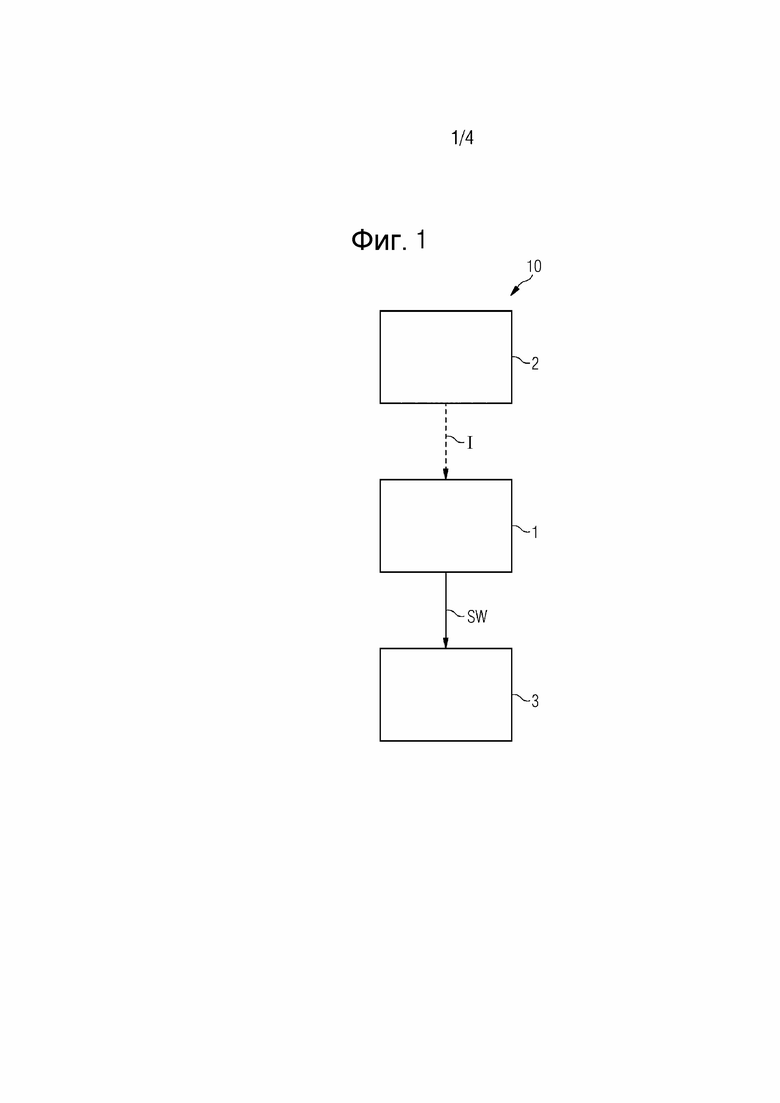
фиг. 1 - схематично традиционную систему автоматизированного управления рельсовым транспортным средством;
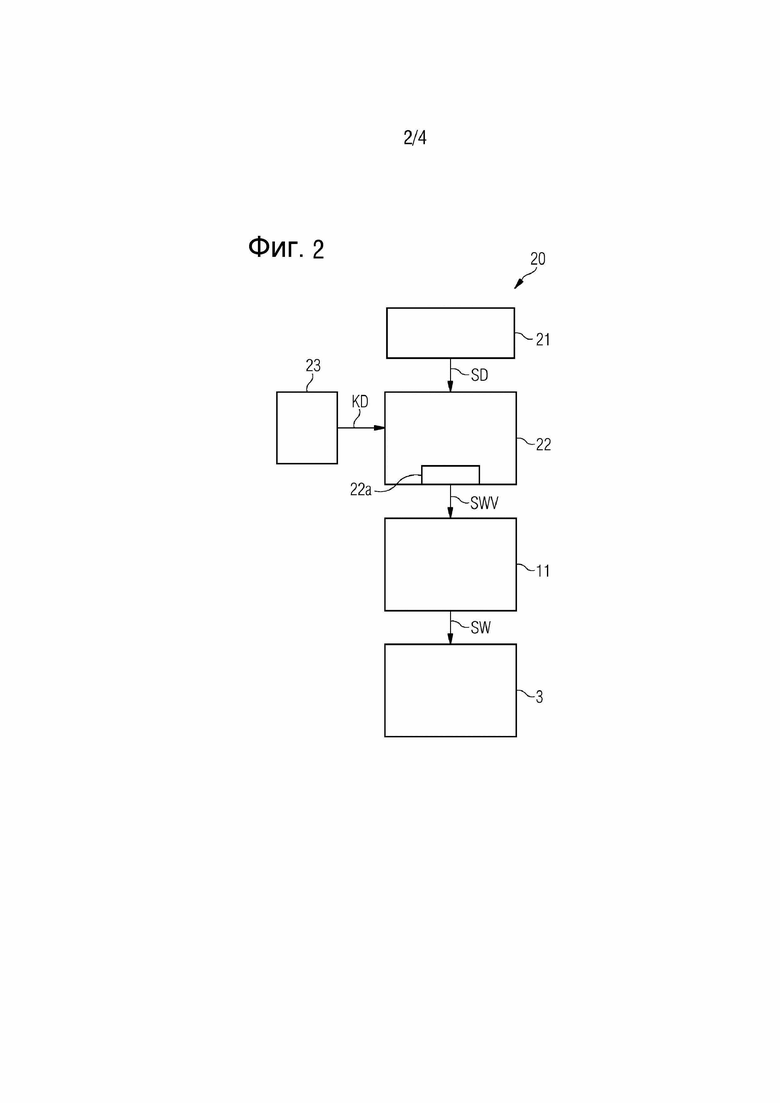
фиг. 2 - схематично автоматизированную бортовую систему управления рельсовым транспортным средством в соответствии с первым примером осуществления изобретения;
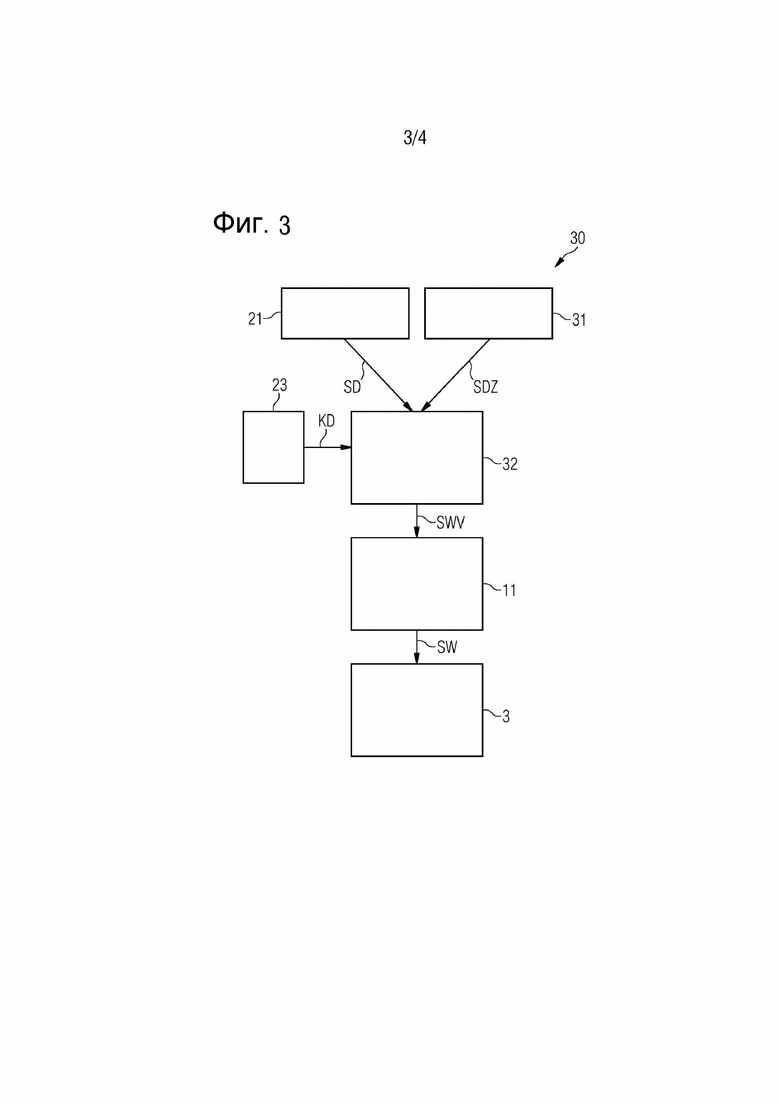
фиг. 3 - схематично автоматизированную бортовую систему управления рельсовым транспортным средством в соответствии со вторым примером осуществления изобретения;
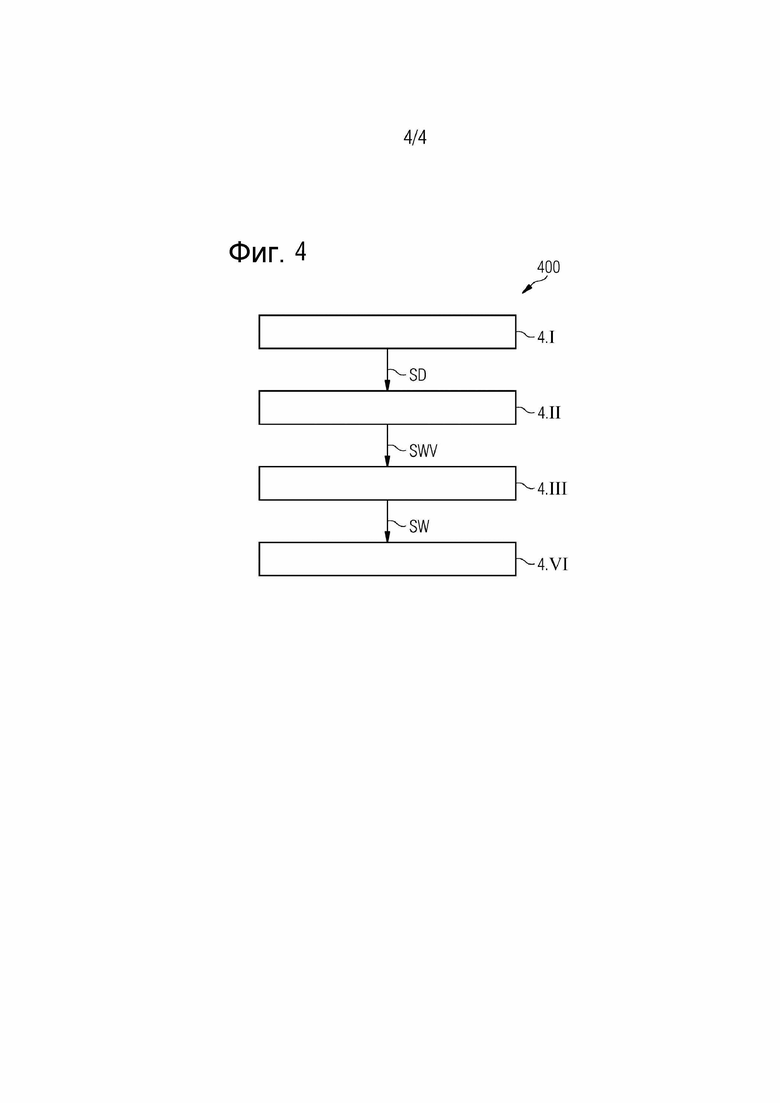
фиг. 4 - блок-схему, иллюстрирующую способ автоматизированного управления рельсовым транспортным средством в соответствии с примером осуществления изобретения.
На фиг. 1 схематично изображена традиционная система 10 автоматизированного управления рельсовым транспортным средством. Система 10 содержит несколько расположенных в инфраструктуре систем 2 безопасности. Например, эти системы 2 безопасности содержат технические устройства, которые выполнены для предохранения участка пути от мешающих объектов. Они включают в себя двери на перронах и датчики для контроля свободы пути. Далее системы безопасности содержат постоянные стационарные ориентиры для синхронизации рельсовых транспортных средств и стационарные предохранительные устройства для затормаживания или остановки рельсовых транспортных средств. Частью системы 10 автоматизированного управления рельсовым транспортным средством являются также бортовые автоматизированные блоки 1 управления, которые на основе переданной техническими устройствами инфраструктуры информации I, например позиционных данных, сигналов остановки и т.п., отдают команды SW движения и торможения и передают их на тяговые и тормозные блоки 3. Последние выполняют команды движения и торможения, благодаря чему реализовано автоматическое управление движением рельсового транспортного средства.
На фиг. 2 схематично изображена автоматизированная бортовая система 20 управления рельсовым транспортным средством в соответствии с первым примером осуществления изобретения. Она отличается от традиционных систем 10 автоматизированного управления рельсовыми транспортными средствами тем, что она реализована в транспортном средстве и не требует никакой коммуникации с оборудованием инфраструктуры.
Один вариант в комбинации с компонентами системы обеспечения безопасности движения поезда и инфраструктурой, а также собственным «интеллектом» транспортного средства также возможен, но необязателен для автоматизированной или автономной функции движения.
Изображенная на фиг. 2 автоматизированная бортовая система 20 управления рельсовым транспортным средством, как и традиционная система 10, содержит устройство 3 управления приводом и тормозами. Оно получает от автоматизированной поездной эксплуатационной системы 11 команды SW движения и торможения. Автоматизированная поездная эксплуатационная система 11 выполняет в автоматизированной бортовой системе 20 управления рельсовым транспортным средством функцию управления и регулирования. При этом учитываются физические свойства рельсового транспортного средства. Во-первых, происходит регулировочно-техническая реализация команд движения и торможения, а, во-вторых, с помощью автоматизированной поездной эксплуатационной системы 11 достигается соблюдение профиля движения. Названные действия основаны на уставках SWV заданных значений. Уставки SWV заданных значений создаются бортовым блоком 22 определения уставок заданных значений. Блок 22 определения уставок заданных значений соединен с бортовыми датчиками 21 и с базой 23 данных. Бортовые датчики 21 содержат блоки для спутниковой навигации, инкрементальные счетчики пройденного пути, инерциальные датчики или визуализирующие блоки. С помощью выявленных названными датчиками данных SD блок 22 определения уставок заданных значений определяет локальное положение Р рельсового транспортного средства. кроме того, блок 22 определения уставок заданных значений содержит блок 22а сравнения, который дополнительно к выявленному положению Р получает из базы 23 данных данные KD карты. Комбинация разных видов датчиков позволяет компенсировать неточности отдельных систем. Например, импульсные датчики пути имеют эффекты скольжения и центрифугирования, а у спутниковых сигналов возникают эффекты отключения при проезде туннелей или через лес. Использование инерциальных датчиков обеспечивает к тому же обнаружение направления при проезде стрелок.
Блок 22а сравнения проводит на основе положения Р и данных KD карты сравнение, причем регистрируется и оценивается содержащаяся в карте информация, которая требуется для режима движения и, тем самым, для текущих уставок SWV заданных значений. Эта информация может включать в себя, например, направление участка пути, положения сигналов, положения остановок, ответвления и т.п.
Рейс рельсового транспортного средства следует заданному заданию движения, которое определено, например, графиком движения. Текущие уставки SWV заданных значений, указывающие, насколько далеко должно двигаться рельсовое транспортное средство, определяются с помощью текущего локального положения Р, заданного задания движения и данных KD карты, точнее говоря, хранящегося в данных KD карты маршрута задания движения. Как уже упомянуто, выявленные уставки заданных значений передаются на автоматизированную поездную эксплуатационную систему 11, формирующую на их основе команды SW движения и торможения, которые управляют устройством 3 управления приводом и тормозами.
На фиг. 3 схематично изображена автоматизированная бортовая система 30 управления рельсовым транспортным средством в соответствии со вторым примером осуществления изобретения. Система 30 отличается от системы 20 на фиг. 2 тем, что она содержит дополнительные датчики 31 для получения информации из окружающего пространства. Дополнительные датчики включают в себя визуализирующие системы и радар для распознавания сигналов, восприятия других участников движения, восприятия препятствий в зоне пути и восприятия пассажиров на остановках. Далее система 30 отличается от системы 20 на фиг. 2 тем, что содержит блок 32 определения уставок заданных значений, который оценивает зарегистрированную дополнительную информацию SDZ датчиков и включает ее в определение предписаний SWV заданных значений. Таким образом, рельсовое транспортное средство может безопасно двигаться также в незащищенной и открытой зоне. Остальные блоки, например база 23 данных, автоматизированная поездная эксплуатационная система 11, а также блок 3 управления приводом и тормозами, не отличаются по своей функции от таких же блоков на фиг. 2 и потому в связи с фиг. 3 еще раз подробно не поясняются.
На фиг. 4 изображена блок-схема 400, иллюстрирующая способ автоматизированного управления рельсовым транспортным средством в соответствии с примером осуществления изобретения. На этапе 4.I сначала происходит бортовое распознавание окружающего рельсовое транспортное средство пространства. Далее на этапе 4.II происходит определение уставок SWV заданных значений для режима регулирования и задания движения рельсового транспортного средства на основе распознавания окружающего пространства. Затем на этапе 4.III происходит формирование команд SW движения и торможения для соблюдения выявленного задания движения на основе уставок SWV заданных значений бортового блока определения уставок заданных значений. Наконец на этапе 4.IV осуществляются тяговые и тормозные действия на основе полученных команд SW движения и торможения.
В заключение следует еще раз указать на то, что у описанных выше способов и устройств речь идет лишь о предпочтительных примерах осуществления изобретения и что специалист может варьировать изобретение, не выходя за рамки изобретения, насколько они заданы формулой. Полноты ради следует также указать на то, что использование неопределенных артиклей «один» и «одна» не исключает того, что соответствующие признаки могут быть также во множественном числе. Точно так же термин «блок» не исключает того, что он состоит из нескольких компонентов, которые, при необходимости, могут быть также пространственно распределены.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического торможения подвижного состава по данным высокоточной системы координат | 2015 |
|
RU2611445C1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ И ДИАГНОСТИКИ МОТОРВАГОННОГО ПОДВИЖНОГО СОСТАВА | 2022 |
|
RU2790985C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2518670C2 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ | 2009 |
|
RU2401217C1 |
| Система интервального регулирования движения поездов на основе спутниковых навигационных средств и цифрового радиоканала с координатным методом контроля | 2016 |
|
RU2618659C1 |
| Система для контроля и регулирования мощности и энергии, расходуемой транспортной системой | 2016 |
|
RU2629622C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА | 2023 |
|
RU2818401C1 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| Интеллектуальный комплекс управления перевозочным процессом городской рельсовой транспортной системы (ГРТС) | 2022 |
|
RU2791353C1 |
Техническое решение относится к средствам автоматизированного бортового управления рельсовым транспортным средством. Система (20, 30) содержит бортовой блок (22) определения уставок заданных значений, автоматизированную поездную эксплуатационную систему (11), блок (3) движения и торможения и дополнительные датчики для регистрации информации об окружающем пространстве. Бортовой блок (22) определения уставок заданных значений выполнен с возможностью, на основе бортового определения положения и данных (KD) карты, а также данных дополнительных датчиков, определять рабочие уставки заданных значений для режима регулирования и текущего задания движения рельсового транспортного средства. Система (11) выполнена с возможностью, на основе уставок (SWV) заданных значений бортового блока (22) определения уставок заданных значений, формировать команды (SW) движения и торможения. Блок (3) движения и торможения выполнен с возможностью осуществлять тяговые и тормозные действия на основе полученных команд (SW) движения и торможения. Достигается повышение безопасности движения рельсового транспортного средства. 4 н. и 5 з.п. ф-лы, 4 ил.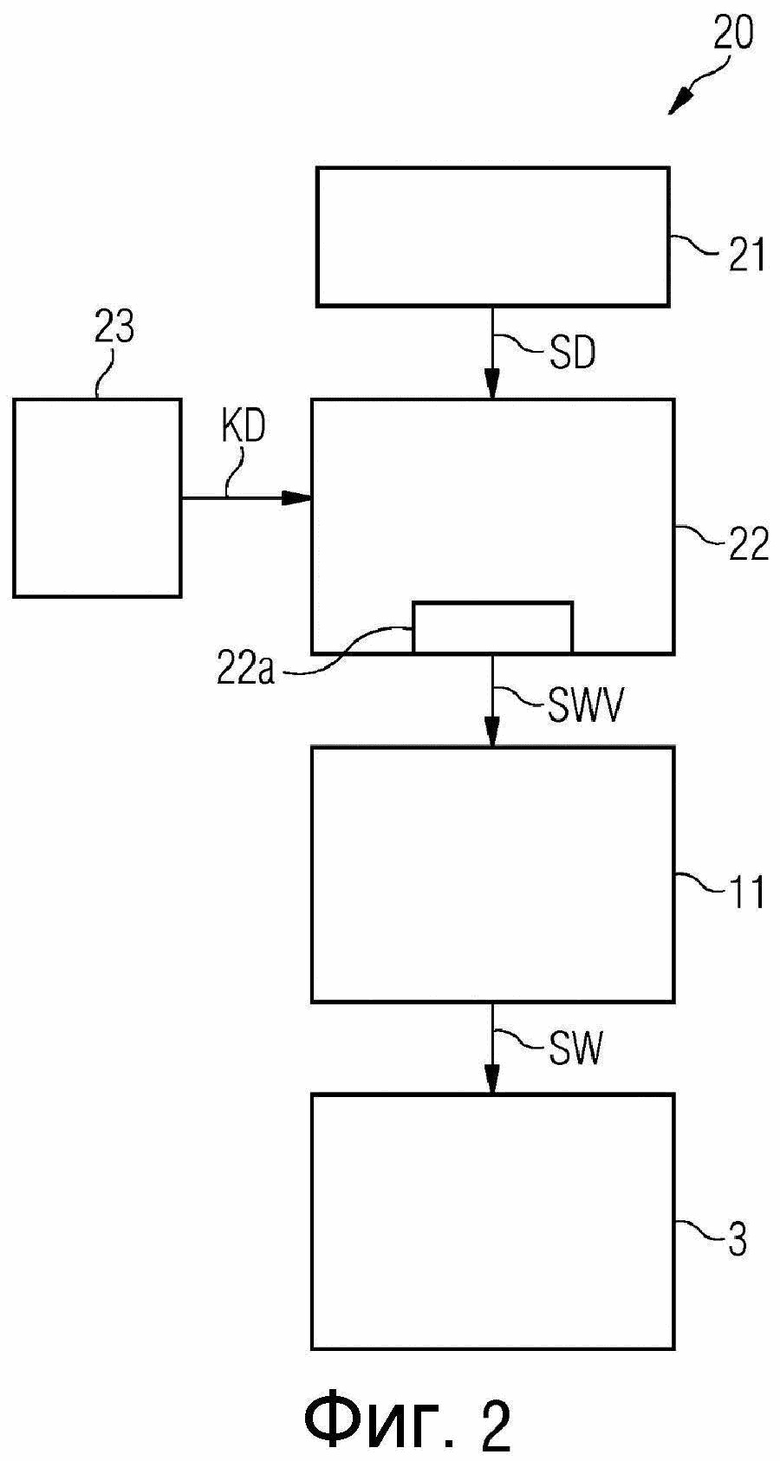
1. Автоматизированная бортовая система (20, 30) управления рельсовым транспортным средством, содержащая бортовой блок (22) определения уставок заданных значений, автоматизированную поездную эксплуатационную систему (11), блок (3) движения и торможения и дополнительные датчики для регистрации информации об окружающем пространстве, причем бортовой блок (22) определения уставок заданных значений выполнен с возможностью определения рабочих уставок (SWV) заданных значений для режима регулирования и текущего задания движения рельсового транспортного средства на основе высокоточного бортового определения положения и высокоточных данных (KD) карты, а также динамических влияний, обнаруженных с помощью зарегистрированной посредством данных дополнительных датчиков информации об окружающем пространстве, с тем чтобы переместить рельсовое транспортное средство в соответствии с заданием движения и состоянием окружающего пространства, автоматизированная поездная эксплуатационная система (11) выполнена с возможностью формирования команд (SW) движения и торможения на основе уставок (SWV) заданных значений бортового блока (22) определения уставок заданных значений, и блок (3) движения и торможения выполнен с возможностью осуществления тяговых и тормозных действий на основе полученных команд (SW) движения и торможения.
2. Система по п. 1, в которой бортовой блок (22) определения уставок заданных значений содержит по меньшей мере один из следующих датчиков (21): блок определения положения, инкрементальный счетчик пройденного пути, визуализирующую систему, радарную систему, инерциальные датчики.
3. Система по п. 1 или 2, в которой бортовой блок (22) определения уставок заданных значений содержит блок (22а) сравнения зарегистрированной информации датчиков с высокоточной картой участка пути.
4. Система по п. 1, в которой высокоточная карта участка пути содержит по меньшей мере часть следующей информации: направление участка пути, положения сигналов, положения остановок, ответвления.
5. Система по любому из пп. 1-4, в которой текущая уставка, как должно двигаться рельсовое транспортное средство, определяется на основе текущего локального положения (Р), задания движения и хранящейся в памяти карты (KD).
6. Система по п. 2, в которой датчики содержат по меньшей мере одну визуализирующую систему или радарную систему, причем информация визуализирующей системы или радарной системы используется для определения следующей информации: идентификация сигналов, восприятие других участников движения, восприятие пассажиров на остановке для осуществления надлежащей процедуры на остановке.
7. Рельсовое транспортное средство, содержащее автоматизированную бортовую систему управления рельсовым транспортным средством по любому из пп. 1-6.
8. Способ автоматизированного управления рельсовым транспортным средством, включающий в себя этапы, на которых: выполняют бортовое высокоточное определение положения (Р) рельсового транспортного средства, регистрируют информацию об окружающем пространстве, определяют рабочие заданные уставки для режима регулирования и текущее задание движения рельсового транспортного средства на основе выявленного положения (Р) и высокоточных данных (KD) карты и обнаруженных с помощью информации об окружающем пространстве динамических влияний, чтобы переместить рельсовое транспортное средство в соответствии с заданием движения и состоянием окружающего пространства, формируют команды (SW) движения и торможения на основе заданных уставок (SWV), осуществляют тяговые и тормозные действия на основе полученных команд (SW) движения и торможения.
9. Компьютерно-читаемый носитель, на котором записаны исполняемые вычислительным блоком сегменты программы для осуществления всех этапов способа по п. 8, когда сегменты программы исполняются вычислительным блоком.
| DE 102012215533 A1, 06.03.2014 | |||
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| DE 102017101505 A1, 26.07.2018 | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |

