Настоящее изобретение относится к роторным расширительным машинам и может использоваться, например, в качестве парового двигателя или двигателя с другим рабочим телом. Роторная расширительная машина может применяться для приведения в движение различных машин и механизмов, а также в качестве компрессора или насоса.
Известна роторная расширительная машина, описанная в патенте Российской Федерации №2387844, содержащая камеру с поршнями, валом, впускными и выпускными отверстиями, равносторонний шарнирно связанный четырехзвенник, криволинейные направляющие, механизм передачи движения от поршней к валу.
Известна роторная расширительная машина, описанная в патенте ФРГ №1451764. Она содержит четыре вращающихся поршня, соединенных между собой в виде равностороннего четырехугольника, обеспечивающего связь между поршнями и валом устройство, включает в себя пару рычагов, прочно соединенных с валом, и вторую пару рычагов, которые расположены поворотно по отношению к ним на том же валу.
Известна также роторная расширительная машина, описанная в патенте США №3295505, включающая четыре поршня, связанные в равносторонний четырехугольник, в котором передача вращения поршней на вал осуществляется четырьмя радиальными рычагами переменной длины, каждый из которых связан одним концом с валом.
Наиболее близким к заявляемому объекту является роторная расширительная машина, описанная в патенте США 4181481, содержащая корпус, с камерой, имеющей внутреннюю замкнутую цилиндрическую поверхность, образующие которой параллельны оси камеры, и две торцевые поверхности, камера имеет впускные и выпускные отверстия, проходящие сквозь корпус, вал, располагающийся в корпусе и проходящий через камеру соосно с ней, четыре поршня, расположенные в камере, образующие равносторонний шарнирно связанный четырехзвенник, имеющие каждый рабочую наружную поверхность, концы поршней находятся в плотном скользящем контакте с внутренней цилиндрической поверхностью камеры, являющейся для них главной направляющей, устройство передачи движения между поршнями и валом, содержащее жестко связанные с валом вспомогательные направляющие.
Недостатками прототипа являются: 1) невозможность обеспечения равномерного вращательного движения выходного вала и получения постоянного вращающего момента в связи с овальным профилем внутренней поверхности камеры; 2) низкая надежность передачи движения от поршней к валу; 3) низкий момент на валу из-за малого количества впускных и выпускных отверстий, их неоптимального размещения, а также неоптимальной конфигурации внешней рабочей поверхности поршней; 4) наличие таких угловых положений вала, при которых невозможен самозапуск машины; 5) пульсация момента инерции машины во время работы, что приводит к возникновению неуравновешенных динамических усилий в зонах касания поршней равностороннего шарнирно связанного четырехзвенника с внутренней поверхностью камеры и, следовательно, ее неравномерному износу и неравномерности хода машины.
Сформулируем совокупность технических результатов, достигаемых роторной расширительной машиной. Техническая задача заключается в создании роторной расширительной машины, которая имеет: специальный криволинейный профиль внутренней поверхности камеры, рассчитываемый по формуле, чем обеспечивает равномерное вращательное движение выходного вала и получение постоянного вращающего момента; механизм передачи движения от поршней к валу со звездочкой и роликами, который обеспечивает более высокую надежность расширительной машины в результате исключения трения скольжения; удвоенное количество впускных и выпускных отверстий, а также их оптимальное размещение в сочетании с упомянутой конфигурацией внешней рабочей поверхности поршней, обеспечивающее более высокий момент на валу расширительной машины и достижение возможности самозапуска машины при любом угловом положении вала; несколько модулей, в каждом из которых звездочка механизма передачи движения от поршней к валу повернута на расчетный угол, при котором обеспечивается большая равномерность хода вала машины в результате компенсации пульсаций момента инерции машины во время работы.
Техническое решение, обеспечивающее решение технической задачи, заключается в том, что роторная расширительная машина содержит корпус с камерой, имеющей внутреннюю замкнутую цилиндрическую поверхность, образующие которой параллельны оси камеры, и две торцевые поверхности, камера имеет впускные и выпускные отверстия, проходящие сквозь корпус, вал, располагающийся в корпусе и проходящий через камеру соосно с ней, четыре поршня, расположенные в камере, образующие равносторонний шарнирно связанный четырехзвенник, имеющие каждый рабочую наружную поверхность, концы поршней находятся в плотном скользящем контакте с внутренней цилиндрической поверхностью камеры, являющейся для них главной направляющей, устройство передачи движения между поршнями и валом, содержащее жестко связанные с валом вспомогательные направляющие. Новым является то, что внутренняя цилиндрическая поверхность камеры имеет профиль (направляющую), являющийся внешней эквидистантой, удаленной на расстояние R1 от опорной кривой, описываемой уравнением в полярных координатах:

где R1 - радиус скругления конца поршня, равный расстоянию от скользящего контакта поршня с внутренней цилиндрической поверхностью камеры до ближайшей шарнирной оси равностороннего шарнирно связанного четырехзвенника; ρ(α) - полярный радиус, исходящий из начала полярных координат О, расположенного в центре профиля камеры; α=0…2π - полярный угол; L - расстояние между осями шарниров поршня (длина стороны равностороннего шарнирно связанного четырехзвенника); π - число Пи; ψ - угол между соседними поршнями (т.е. между прямыми, соединяющими шарнирные оси); ψmin≥ψopt - задаваемая константа, равная минимальному углу между поршнями в равностороннем шарнирно связанном четырехзвеннике; ψopt - оптимальная величина минимального угла между поршнями ψmin в равностороннем шарнирно связанном четырехзвеннике, которая определяется из уравнения:
ψopt=2tan-1(π-2ψopt).
Рабочая наружная поверхность поршня представляет собой цилиндрическую поверхность, образующие которой параллельны оси камеры, а направляющая проходит через три точки касания профиля внутренней поверхности камеры с ближайшей внешней поверхностью поршня при прямом угле между соседними поршнями. Упомянутая направляющая состоит из трех сопряженных дуг, крайние дуги имеют радиус R1 а средняя дуга имеет радиус R=R1+R2, где радиус R2 определяется выражением:
Устройство передачи движения между поршнями и валом содержит ролики, установленные на внутренней стороне поршней, по два ролика на каждом поршне, опирающиеся на вспомогательные криволинейные направляющие, выполненные в виде четырехконечной звездочки, жестко установленные на валу соосно ему, оси роликов параллельны оси камеры и закреплены на каждом поршне на одинаковых расстояниях: L1 - расстояние от ближайшей шарнирной оси равностороннего шарнирно связанного четырехзвенника, принадлежащей данному поршню, L2 - расстояние от прямой, соединяющей середины шарнирных осей поршня; форма отрезка вспомогательной криволинейной направляющей, являющейся опорой для отдельного ролика, представляет цилиндрическую поверхность, образующие которой параллельны оси камеры, а направляющая является эквидистантой, удаленной на расстояние Rr от опорной кривой, описываемой следующими уравнениями в декартовых координатах:

где  ; Rr - радиус ролика; α=0…45°; знак «минус» перед L2 соответствует расположению оси ролика между прямой, соединяющей середины шарнирных осей поршня, и валом; знак «плюс» перед L2 соответствует расположению оси ролика между прямой, соединяющей середины шарнирных осей поршня, и внутренней поверхностью камеры.
; Rr - радиус ролика; α=0…45°; знак «минус» перед L2 соответствует расположению оси ролика между прямой, соединяющей середины шарнирных осей поршня, и валом; знак «плюс» перед L2 соответствует расположению оси ролика между прямой, соединяющей середины шарнирных осей поршня, и внутренней поверхностью камеры.
Камера имеет два впускных и два выпускных отверстия. Каждая пара впускных (выпускных) отверстий расположена диаметрально противоположно относительно оси О камеры в областях между средней и боковой линиями касания поршнем внутренней поверхности камеры при прямом угле между поршнями (в таком положении равносторонний шарнирно связанный четырехугольник имеет вид квадрата). При этом впускные и выпускные отверстия расположены по разные стороны от средней линии касания поршнем внутренней поверхности камеры.
На одном валу установлено N отдельных роторных расширительных машин (модулей) по пп. 1-3, вспомогательные криволинейные направляющие, выполненные в виде четырехконечной звездочки, которых повернуты каждая по оси вала в одном направлении последовательно на угол  .
.
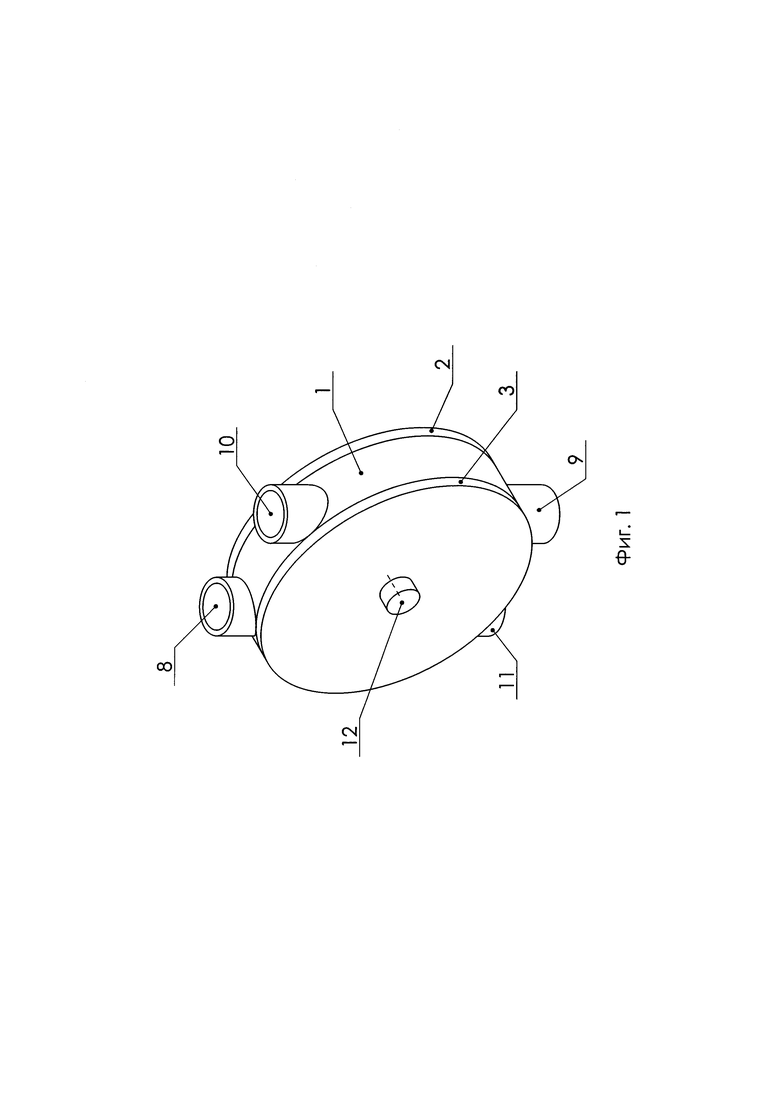
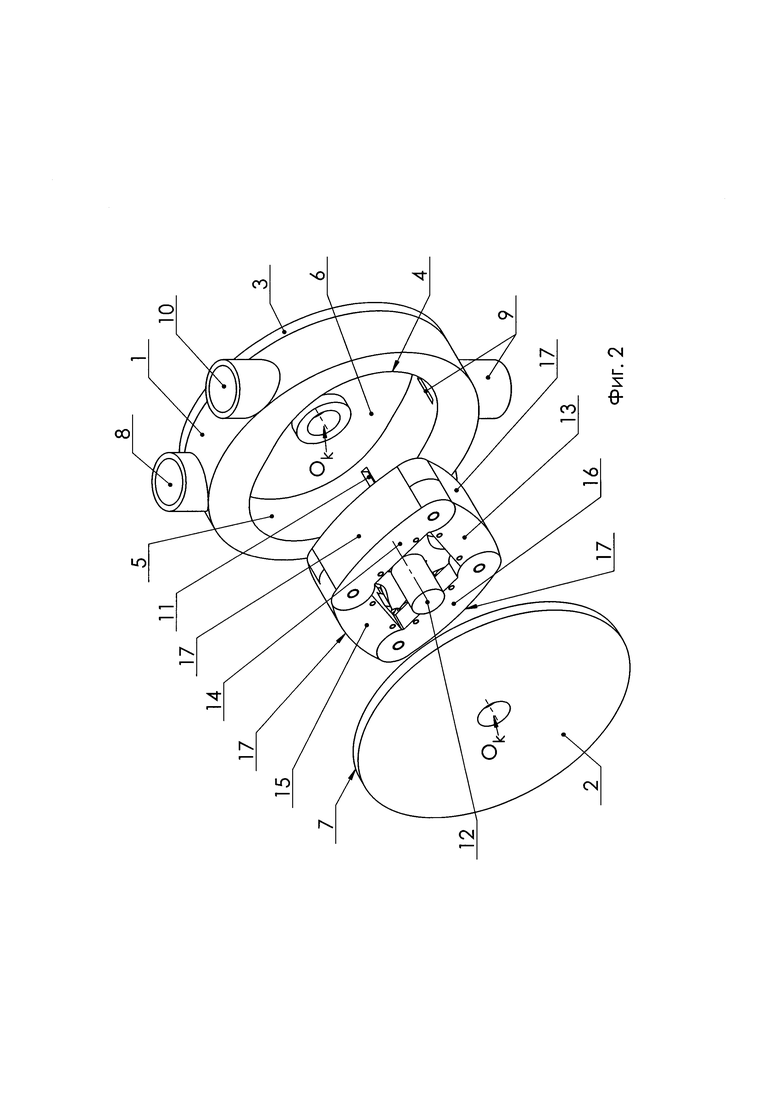
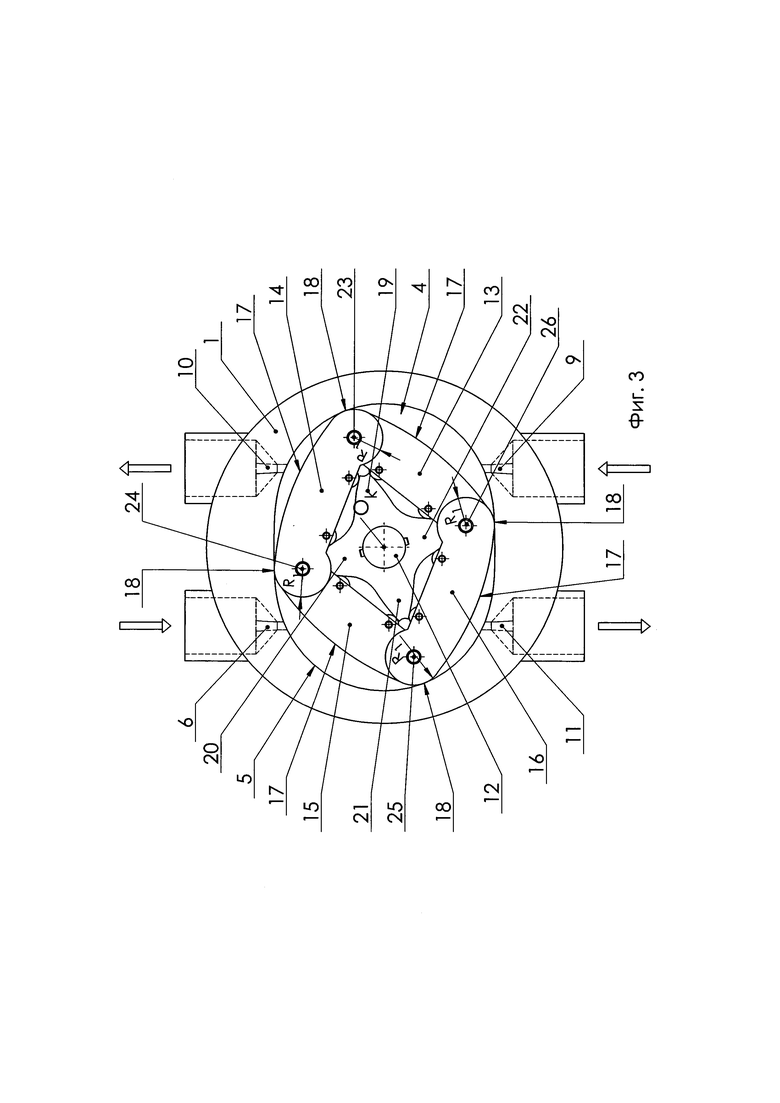
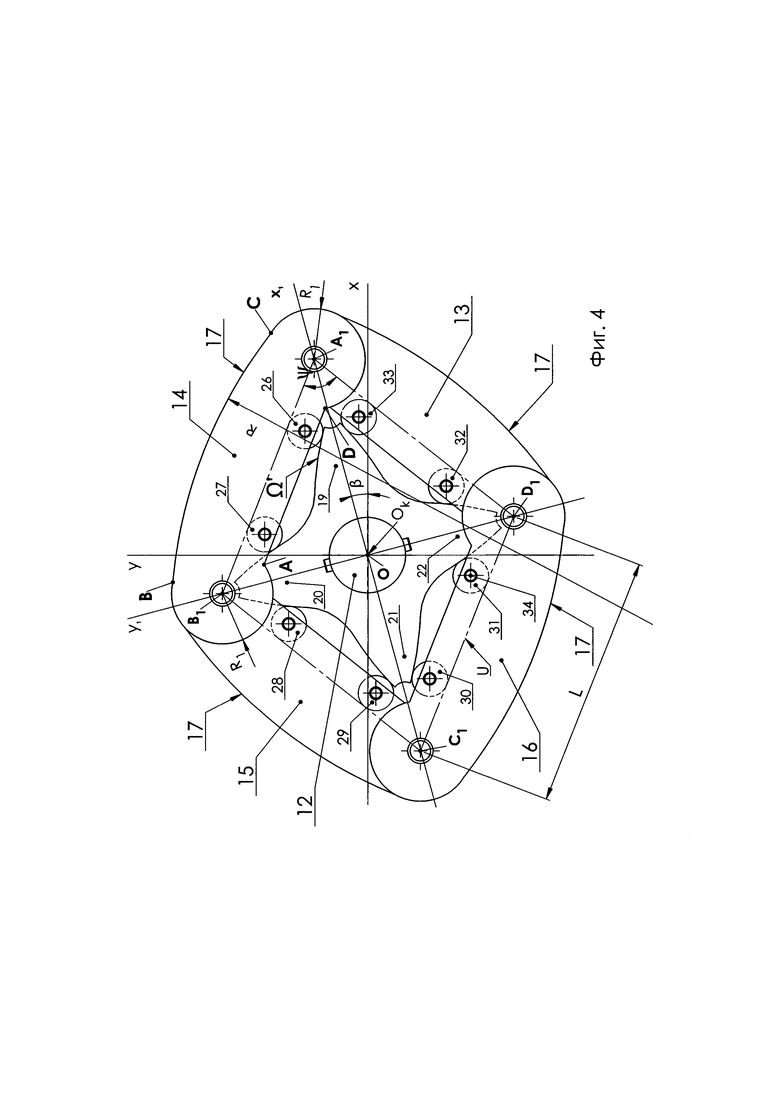
На фиг. 1 приведен внешний вид роторной расширительной машины. На фиг. 2 изображена роторная расширительная машина с разнесенными вдоль оси камеры частями. На фиг. 3 изображена роторная расширительная машина со снятыми торцевыми крышками. На фиг. 4 показана роторная расширительная машина без корпуса. На фиг. 5 иллюстрируется прилегание отдельного поршня к внутренней поверхности камеры. На фиг. 6 схематично изображен равносторонний шарнирно связанный четырехзвенник, вписанный в профиль внутренней цилиндрической поверхности камеры Q при ψmin=ψopt, а также профили Q' и Q'' при ψmin≠ψopt. Фиг. 7 иллюстрирует построение профиля рабочей наружной поверхности поршня. На фиг. 8 схематично изображены два положения равностороннего шарнирно связанного четырехзвенника при минимальном и максимальном углах между поршнями ψmin и ψmax. На фиг. 9 схематично изображено отдельное звено равностороннего шарнирно связанного четырехзвенника с роликом. На фиг. 10 показан внешний вид многомодульной роторной расширительной машины на примере двухмодульной. На фиг. 11 изображена двухмодульная роторная расширительная машина с разнесенными вдоль оси камеры частями. На фиг. 12 показано взаимное расположение на валу двух звездочек двухмодульной роторной расширительной машины.
Роторная расширительная машина содержит корпус 1, с торцевыми крышками 2, 3 (фиг. 1). Внутри корпуса имеется камера 4 (фиг. 2) с внутренней замкнутой цилиндрической поверхностью 5, сопряженной с двумя внутренними торцевыми поверхностями 6, 7 торцевых крышек (фиг. 2). Камера 4 имеет два впускных отверстия 8, 9 и два выпускных отверстия 10, 11, проходящих сквозь корпус 1 в камеру 4 (для противоположного направления вращения роторной расширительной машины впускные и выпускные отверстия меняются местами). В корпусе 1 располагается вал 12, который проходит через камеру 4 соосно с ней. В камере 4 размещены четыре поршня 13…16, образующие равносторонний шарнирно связанный четырехзвенник, имеющие каждый рабочую наружную поверхность 17. Концы поршней находятся в плотном скользящем контакте 18 (фиг. 3) с внутренней цилиндрической поверхностью 5 камеры 4, являющейся для них главной направляющей. Имеется устройство передачи движения между поршнями и валом, содержащее жестко связанные с валом криволинейные вспомогательные направляющие 19…22 (фиг. 3, 4), имеющие вид четырехконечной звездочки, концы которой при любом положении поршней не касаются шарнирных осей 23…26 поршней 13…16.
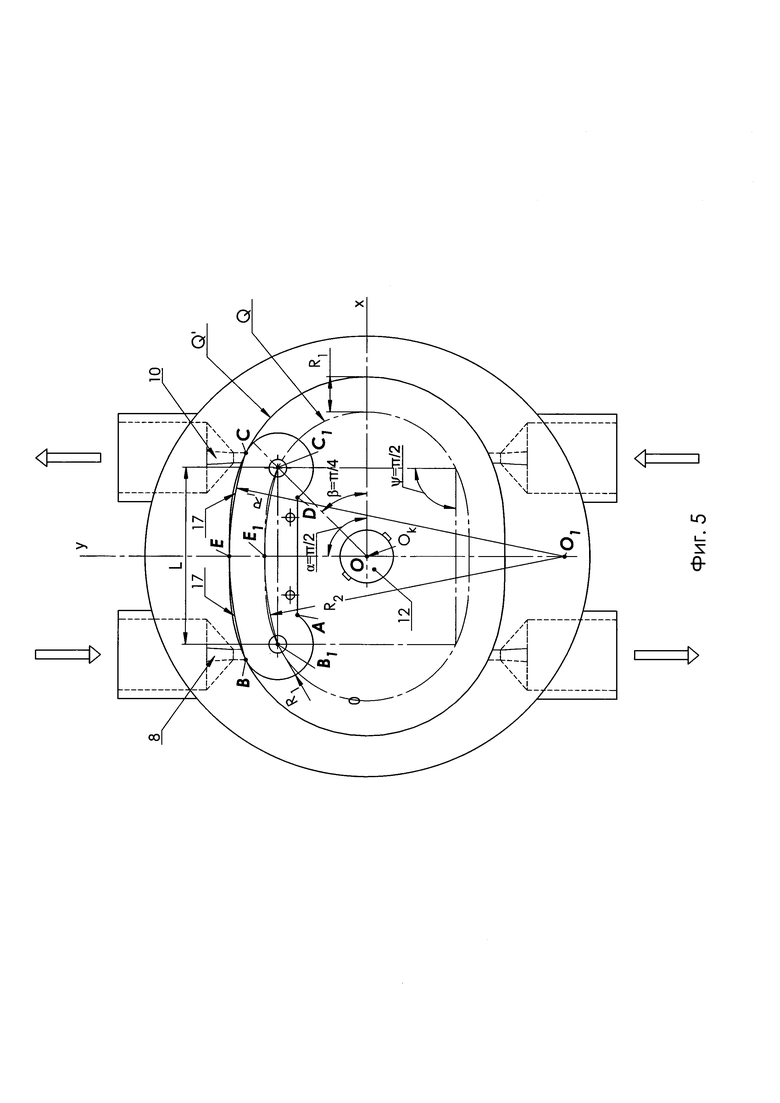
Внутренняя цилиндрическая поверхность 5 камеры 4 имеет профиль (направляющую), являющийся внешней эквидистантой Q' (фиг. 5), удаленной на расстояние R1 от опорной кривой Q, описываемой уравнением в полярных координатах:

где R1 - радиус скругления конца поршня (фиг. 7), равный расстоянию от скользящего контакта 18 (фиг. 3) поршня с внутренней цилиндрической поверхностью камеры до ближайшей шарнирной оси равностороннего шарнирно связанного четырехзвенника; ρ(α) - полярный радиус (фиг. 6) (начало полярных координат O расположено в центре профиля камеры); α=0…2π - полярный угол; L - расстояние между осями шарниров поршня (фиг. 4, 5) (длина стороны равностороннего шарнирно связанного четырехзвенника на фиг. 6); π - число Пи; ψ - угол между соседними поршнями; ψmin≥ψopt - задаваемая константа, равная минимальному углу между поршнями в равностороннем шарнирно связанном четырехзвеннике; ψopt - оптимальная величина минимального угла между поршнями ψmin в равностороннем шарнирно связанном четырехзвеннике, которая определяется из уравнения:

Вычисленное значение ψopt≈69,957°.
Поясним вывод уравнения (2).
Значение угла ψopt соответствует нулевой кривизне профиля камеры при  . Это условие достигается при равенстве нулю второй производной по α от проекции ρ(α) на декартову ось OY
. Это условие достигается при равенстве нулю второй производной по α от проекции ρ(α) на декартову ось OY  , где y(α)=ρ(α)sinα. Следовательно, для получения значения ψopt нужно решить указанное уравнение относительно ψ. Возьмем вторую производную от y(α) с учетом (1):
, где y(α)=ρ(α)sinα. Следовательно, для получения значения ψopt нужно решить указанное уравнение относительно ψ. Возьмем вторую производную от y(α) с учетом (1):

и приравняем ее нулю, заменив ψ на ψopt:

Упростив (4), получим искомое уравнение (2).
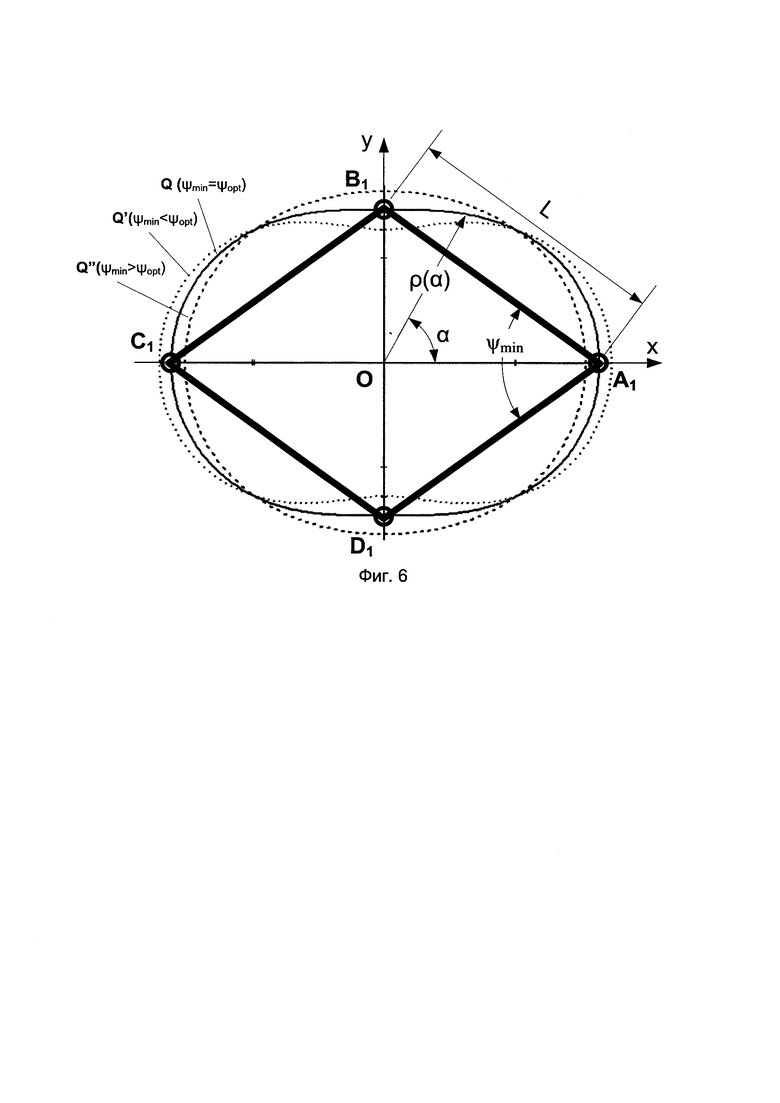
Выражение (1) выведено в патенте на изобретение Российской Федерации №2387844. Условием вывода формулы (1) является обеспечение равномерного вращательного движения вала машины, что равносильно равномерному вращательному движению декартовых осей Ox1 и Oy1 по углу β (угол поворота вала 12), связанных с вершинами A1, B1, C1, D1 равностороннего шарнирно связанного четырехзвенника (фиг. 4, 5), т.е.  . На фиг. 6 схематично изображен равносторонний шарнирно связанный четырехзвенник, вписанный в профиль внутренней цилиндрической поверхности камеры при ψmin=ψopt, а также ряд опорных кривых при ψmin≠ψopt. Например, при ψmin>ψopt опорная кривая приобретает конфигурацию Q'', которая обладает положительной кривизной (выпуклостью) профиля при
. На фиг. 6 схематично изображен равносторонний шарнирно связанный четырехзвенник, вписанный в профиль внутренней цилиндрической поверхности камеры при ψmin=ψopt, а также ряд опорных кривых при ψmin≠ψopt. Например, при ψmin>ψopt опорная кривая приобретает конфигурацию Q'', которая обладает положительной кривизной (выпуклостью) профиля при  , при этом вторая производная
, при этом вторая производная  . Для ψmin<ψopt профиль приобретает конфигурацию Q', которая имеет отрицательную кривизну (вогнутость) профиля при , при этом вторая производная
. Для ψmin<ψopt профиль приобретает конфигурацию Q', которая имеет отрицательную кривизну (вогнутость) профиля при , при этом вторая производная  .
.
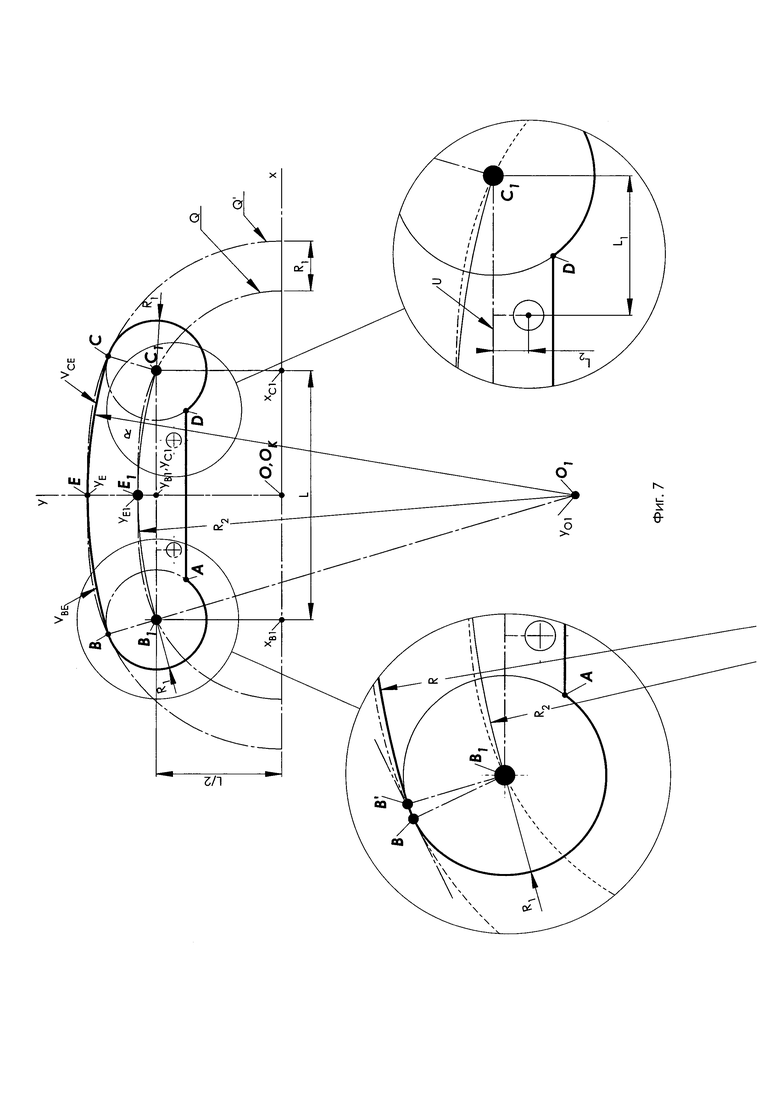
Рабочая наружная поверхность 17 каждого поршня (фиг. 4) представляет собой цилиндрическую поверхность, образующие которой параллельны оси Ok камеры 4, а направляющая проходит через три точки В, Е, С касания профиля внутренней поверхности камеры Q' с ближайшей внешней поверхностью поршня при прямом угле между соседними поршнями ψ=π/2 (фиг. 5, 7). Упомянутая направляющая состоит из трех сопряженных дуг АВ, ВС, CD (фиг. 5), крайние дуги АВ и CD имеют радиус R1, а средняя дуга ВС имеет радиус R=R1+R2, где радиус R2 определяется уравнением:

Поясним вывод формулы (5) (фиг. 5, 7) (фиг. 7 наиболее полно иллюстрирует построение профиля рабочей наружной поверхности поршня).
Рассмотрим положение равностороннего шарнирно связанного четырехзвенника при угле между соседними поршнями ψ=π/2 (фиг. 5) (при этом равносторонний шарнирно связанный четырехугольник имеет вид квадрата). Введем декартову систему координат xOy с центром О, лежащим на оси Ok камеры 4 (фиг. 2, 5, 7). Для определения радиуса R будем считать, что касание дуги ВС профиля внешней рабочей поверхности поршня с профилем внутренней цилиндрической поверхности 5 камеры 4 происходит в трех точках: В, Е, С, причем точка касания Е равноудалена от точек касания В и С. При этом между внешней рабочей поверхностью поршня и внутренней цилиндрической поверхностью 5 камеры 4 образуется два рабочих объема VBE, VCE, изолированных от остального пространства камеры 4. Ось Oy введенной декартовой системы координат проходит через среднюю точку касания Е. Центр O1 окружности радиуса R, являющейся направляющей внешней цилиндрической рабочей поверхности 17 поршня, лежит на оси Oy. Точки B1, E1, C1 лежат на окружности радиуса R2 с центром в точке O1. Данная окружность является концентрической по отношению к окружности радиуса R и отстоит от нее на расстояние R1 (радиус цилиндрического закругления конца поршня). Определим три уравнения, описывающие расположение точек B1, E1, C1 в выбранной декартовой системе координат:
где  ,
,  ,
,  - координаты икс точек B1, E1, C1;
- координаты икс точек B1, E1, C1;  ,
,  ,
,  - координаты игрек точек В1, Е1, С1;
- координаты игрек точек В1, Е1, С1;  ,
,  - координаты икс и игрек точки О1; R2=R-R1, R1 - радиус цилиндрического закругления конца поршня.
- координаты икс и игрек точки О1; R2=R-R1, R1 - радиус цилиндрического закругления конца поршня.
Определим , являющуюся координатой ρ(α) опорной кривой Q при . Из формулы (1) получим:

Следовательно, в системе уравнений (6) содержится две неизвестные: , R. После подстановки известных значений координат точек, получаем следующую систему уравнений:
решение которой дает искомое выражение (5) для R2.
На вынесенных увеличенных областях фиг. 7 показаны: слева - точка В скользящего контакта 18 (фиг. 3) конца поршня с внутренней поверхностью камеры и точка В' сопряжения профиля рабочей поверхности поршня (радиус R) с профилем закругления конца поршня (радиус R1); справа - расположение оси отдельного ролика по отношению к ближайшей шарнирной оси С1 поршня (расстояния L1, L2).
Устройство передачи движения между поршнями и валом содержит ролики 26…33 (фиг. 4), установленные на внутренней стороне поршней, по два ролика на каждом поршне, опирающиеся на вспомогательные криволинейные направляющие 19…22, выполненные в виде четырехконечной звездочки, жестко установленные на валу 12 соосно ему, оси 34 всех роликов параллельны оси Ok камеры и закреплены на каждом поршне на одинаковых расстояниях: L1 - расстояние от ближайшей шарнирной оси равностороннего шарнирно связанного четырехзвенника, принадлежащей данному поршню, и L2 - расстояние от прямой U, соединяющей середины шарнирных осей поршня (фиг. 4, 9). Форма отрезка вспомогательной криволинейной направляющей на звездочке, являющейся опорой для отдельного ролика, представляет цилиндрическую поверхность, образующие которой параллельны оси камеры, а направляющая является эквидистантой, удаленной на расстояние Rr от опорной кривой, описываемой следующими уравнениями в декартовых координатах:


где

Rr - радиус ролика; α=0…45°; знак «минус» перед L2 соответствует расположению оси ролика между прямой, соединяющей середины шарнирных осей поршня, и валом; знак «плюс» перед L2 соответствует расположению оси ролика между прямой, соединяющей середины шарнирных осей поршня, и внутренней поверхностью камеры.
Построение с помощью Mathcad вспомогательных криволинейных направляющих 19…22, выполненных в виде четырехконечной звездочки, показано в Приложении 1.
Поясним вывод формул (9-10).
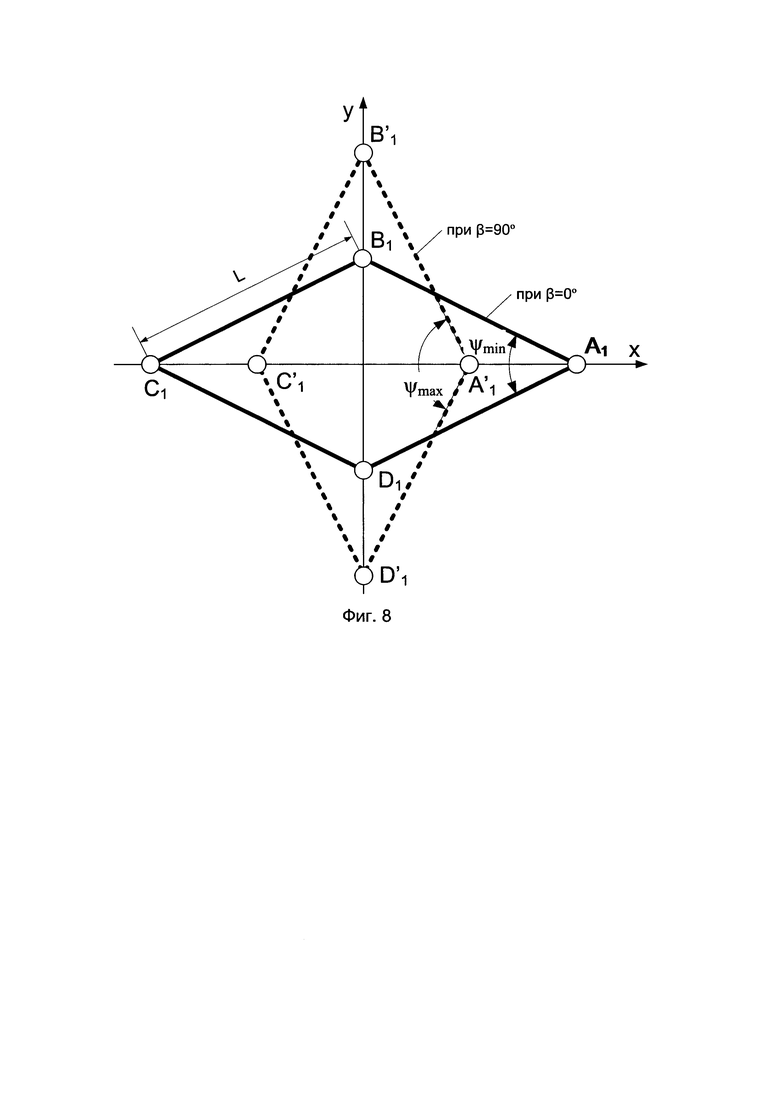
При повороте выходного вала β=0° и β=90° (фиг. 4) поршни (стороны равностороннего шарнирно связанного четырехзвенника A1B1C1D1) занимают положения, изображенные на фиг. 8 (движение без учета вращения). В начальном положении (β=0°) поршень 14 (фиг. 3, 4) находится в позиции А1В1 (фиг. 8), при этом угол между поршнями минимальный ψmin. При угле поворота вала β=90° поршень займет положение  ,
,  , а угол между поршнями достигнет максимального значения ψmax (если учитывать поворот поршней вместе с валом, то пунктирный ромб (фиг. ) будет еще и повернут на 90° против часовой стрелки), однако, для расчета траектории движения роликов, представляющей собой профиль вспомогательной направляющей, необходимо учитывать лишь движение поршней по отношению к валу, т.к. вращательное движение они совершают совместно). При таком перемещении любая точка K, жестко связанная со звеном А1В1, будет двигаться по определенной траектории. В нашем случае эта точка есть центр (проекция оси) ролика.
, а угол между поршнями достигнет максимального значения ψmax (если учитывать поворот поршней вместе с валом, то пунктирный ромб (фиг. ) будет еще и повернут на 90° против часовой стрелки), однако, для расчета траектории движения роликов, представляющей собой профиль вспомогательной направляющей, необходимо учитывать лишь движение поршней по отношению к валу, т.к. вращательное движение они совершают совместно). При таком перемещении любая точка K, жестко связанная со звеном А1В1, будет двигаться по определенной траектории. В нашем случае эта точка есть центр (проекция оси) ролика.
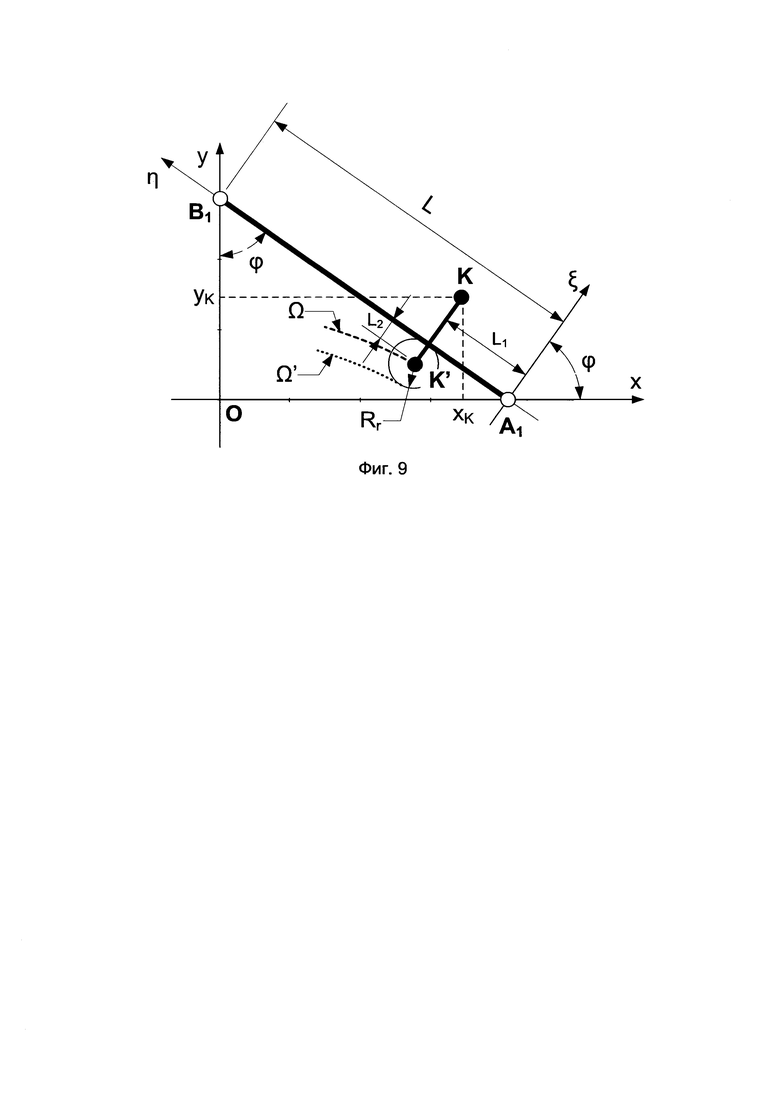
Чтобы определить аналитическую зависимость для траектории движения центров роликов относительно вала, изобразим отдельно звено А1В1 на фиг. 9 и введем две системы координат: неподвижную хОу и подвижную ξА1η, связанную со звеном A1B1. Точка A1 перемещается вдоль оси Ох и имеет координаты:  и
и  . При этом точка B1 перемещается вдоль оси Оу, ее координаты:
. При этом точка B1 перемещается вдоль оси Оу, ее координаты:  и
и  .
.
Используя формулы преобразования координат, определим координаты точки K в неподвижной системе хОу. (Для вывода формул (12, 13) использовано расположение точки К при положительных величинах ξK. В общем случае координата ξK может быть положительной, отрицательной (точка K'), либо равной нулю, в зависимости от расположения точки K относительно оси A1η. Например, в конструкции, изображенной на фиг. 4, координата ξK отрицательна. Координаты точки K:


где: ϕ - угол между осями Ох и A1ξ, или Оу и А1η.
Введем следующие подстановки:  ,
,  ,
,  , относительные координаты точки K, соответствующие центру ролика, в подвижной системе координат: ηK=L1, ξK=L2.
, относительные координаты точки K, соответствующие центру ролика, в подвижной системе координат: ηK=L1, ξK=L2.
Если ξK>0 (точка K), то ηK=L1, ξK=L2,


Если ξK<0 (точка K'), то ηK=L1, ξK=-L2,


Примем обобщенное обозначение декартовых координат центра ролика: x и y. Тогда после перечисленных подстановок выражения (12, 13) примут искомый вид (9, 10). Координата  точки А1 определяется выражением (11), где ρ(α) дается формулой (1).
точки А1 определяется выражением (11), где ρ(α) дается формулой (1).
Меняя угол α в диапазоне от 0° до 45°, получим траекторию (1) Ω перемещения центра одного ролика. Для получения участка профиля звездочки строится эквидистанта Ω' к траектории Ω со смещением на величину радиуса Rr роликов 26…33 (фиг. 4, 9).
Определив траекторию движения одного ролика, например ролика 26 (фиг. 4), можно известным методом симметричного переноса координат определить траектории для всех остальных роликов. Эквидистанта к каждой упомянутой траектории, удаленная от нее на расстояние Rr, является образующей для цилиндрического отрезка вспомогательной криволинейной направляющей, служащей опорой для соответствующего ролика. Построение траекторий для всех роликов с помощью программы Mathcad приведено в Приложении 1.
Каждая пара впускных отверстий 8, 9 и выпускных отверстий 10, 11 расположена диаметрально противоположно относительно оси О камеры в областях между средней и боковой линиями касания поршнем внутренней поверхности камеры при угле между поршнями, равном ψ=π/2 (при этом равносторонний шарнирно связанный четырехугольник имеет вид квадрата). При этом впускные и выпускные отверстия расположены по разные стороны от средней линии касания поршнем внутренней поверхности камеры при ψ=π/2. Например, на фиг. 5 положение изображенного поршня соответствует ψ=π/2, а впускное отверстие 8 расположено между средней линией касания поршнем внутренней поверхности камеры, которая изображается точкой Е, и боковой линией касания поршнем внутренней поверхности камеры, которая изображается точкой В. Выпускное отверстие 10 расположено между средней линией касания поршнем внутренней поверхности камеры, которая изображается точкой Е, и боковой линией касания поршнем внутренней поверхности камеры, которая изображается точкой С.
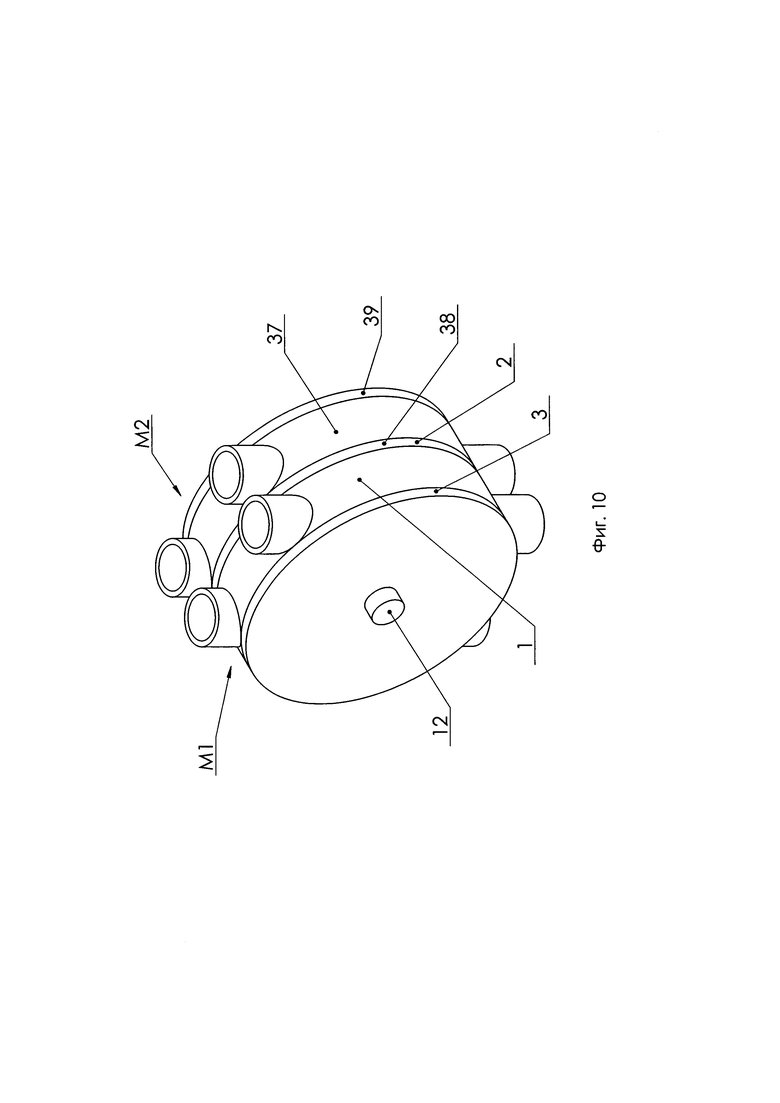
На одном валу установлено N отдельных роторных расширительных машин - модулей (по пп. 1-3 формулы изобретения), криволинейные вспомогательные направляющие 19…22 которых, имеющие вид четырехконечных звездочек 35, 36 (далее - звездочки), повернуты каждая по оси вала в одном направлении последовательно на угол  . На фиг. 10 показан внешний вид многомодульной роторной расширительной машины на примере двухмодульной. Оба модуля M1 и М2 имеют общий вал 12 и состоят: модуль M1 - из корпуса 1 с торцевыми крышками 2, 3, модуль М2 - из корпуса 37 с торцевыми крышками 38, 39, причем задняя крышка 2 первого модуля и передняя крышка 38 второго модуля являются общими, т.е. выполнены как единая стенка.
. На фиг. 10 показан внешний вид многомодульной роторной расширительной машины на примере двухмодульной. Оба модуля M1 и М2 имеют общий вал 12 и состоят: модуль M1 - из корпуса 1 с торцевыми крышками 2, 3, модуль М2 - из корпуса 37 с торцевыми крышками 38, 39, причем задняя крышка 2 первого модуля и передняя крышка 38 второго модуля являются общими, т.е. выполнены как единая стенка.
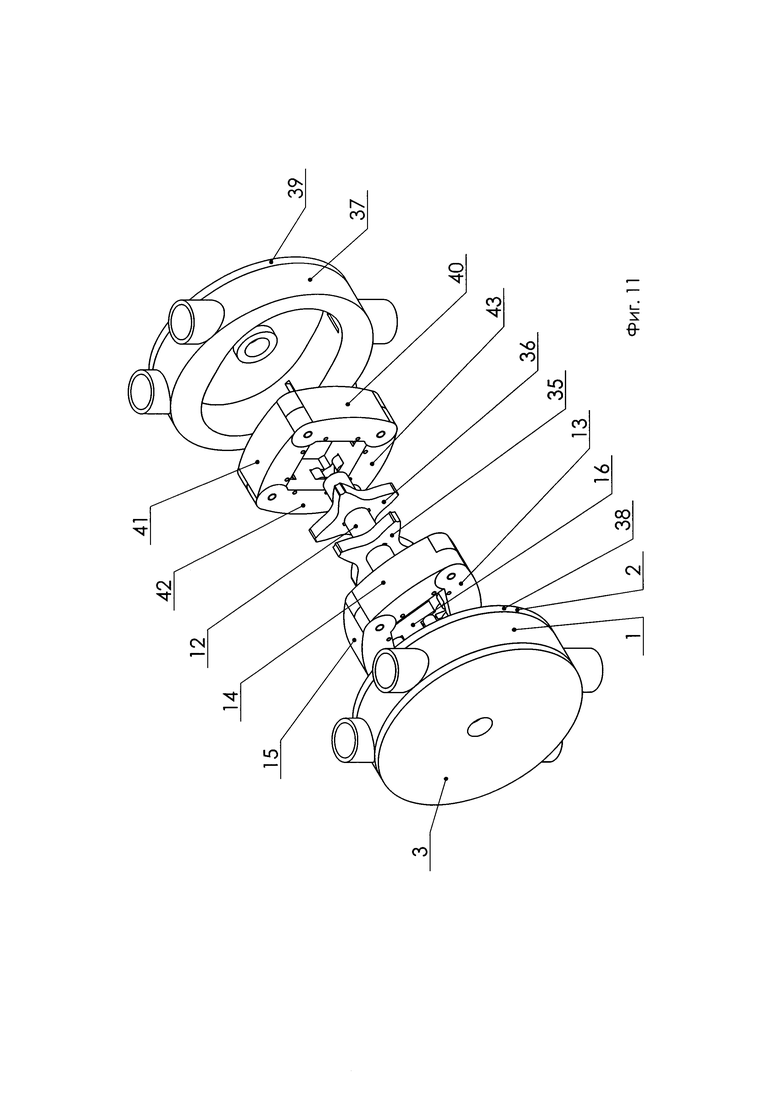
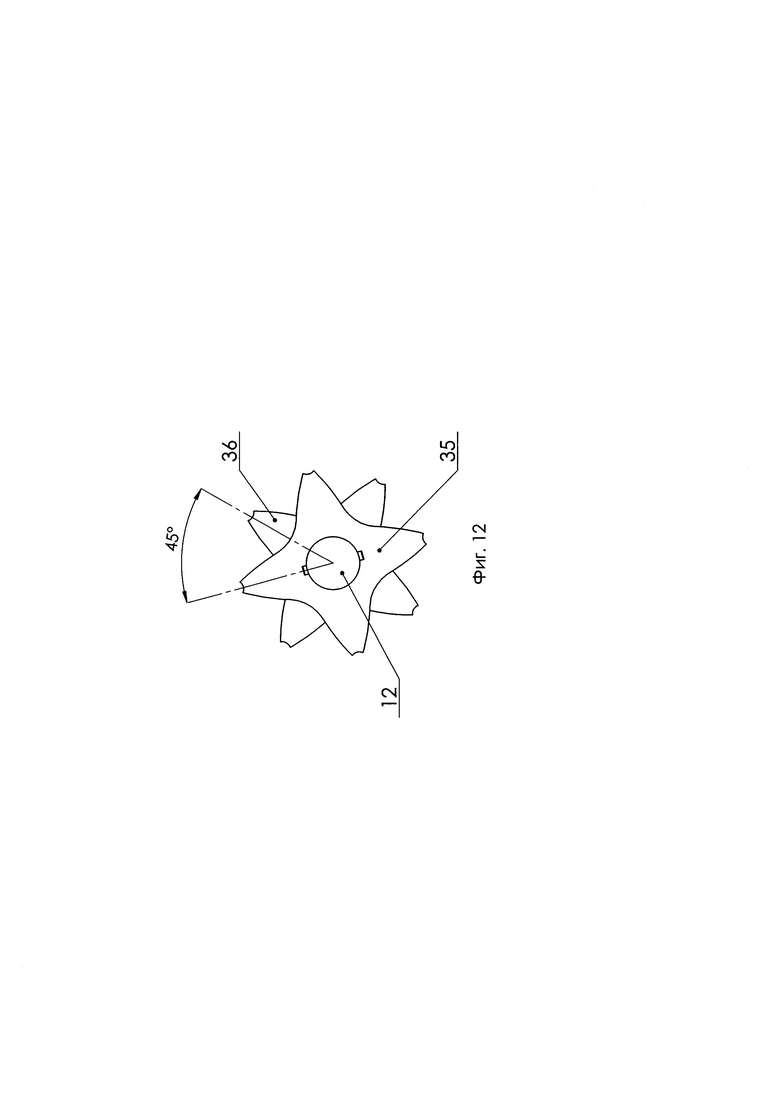
На фиг. 11 изображена двухмодульная роторная расширительная машина с разнесенными вдоль оси камеры частями. На ней изображены поршни первого модуля 13…16 и поршни второго модуля 40…43, а также звездочки 35, 36 двух модулей, повернутые друг относительно друга на угол 45°. На фиг. 12 показано взаимное расположение на валу двух звездочек 35, 36 двухмодульной роторной расширительной машины, которые повернуты друг относительно друга на угол 45°.
Роторная расширительная машина работает следующим образом.
При подаче через входные отверстия 8, 9 (фиг. 3) газообразного рабочего тела под давлением, на рабочие наружные поверхности 17 поршней 15, 13 действует распределенная сила, обусловленная разностью давлений рабочего тела и внешней среды (или давления в выпускном трубопроводе). В результате равносторонний шарнирно связанный четырехзвенник, состоящий из поршней, совершает вращательное движение против часовой стрелки. В процессе вращения упомянутый четырехзвенник циклически изменяет конфигурацию из-за взаимодействия с внутренней поверхностью камеры, имеющей профиль, заданный формулой (1). При этом через выходные отверстия 10, 11 рабочее тело выбрасывается наружу. Это обусловлено циклическим изменением объемов, заключенных между внутренней поверхностью камеры и рабочими наружными поверхностями поршней, в процессе вращения упомянутого четырехзвенника.
Движение поршней передается валу 12 через ролики, опирающиеся на вспомогательные криволинейные направляющие 19…22, имеющие вид четырехконечных звездочек. При этом ролики (их оси) совершают возвратно-поступательное движение вдоль упомянутых направляющих.
При угле между соседними поршнями ψ=π/2 (фиг. 5, 7) (при этом равносторонний шарнирно связанный четырехугольник имеет вид квадрата) имеются три области плотного скользящего контакта между внешними рабочими поверхностями противоположных (верхним и нижним) поршней, обращенных к впускным и выпускным отверстиям 8, 10 и 9, 11. Поэтому между внутренней поверхностью камеры и наружной рабочей поверхностью 17 упомянутых двух поршней образуется по два замкнутых по отношению к камере и друг другу объема, расположенных на фиг. 5, например, для верхнего поршня между точками В и Е, а также точками Е и С. Именно из этого положения рассматриваем начало движения поршней. Так как объем замкнутого объема BE, а также аналогичного объема для противоположного поршня малы, то получаем высокий коэффициент расширения рабочего тела в машине (отношение максимального рабочего объема к минимальному). Кроме того, наличие шести изолированных друг от друга объемов между рабочими внешними поверхностями поршней и внутренней поверхностью камеры при ψ=π/2 позволяет иметь не по одному, а по два впускных (выпускных) отверстия, что соответствует двукратному увеличению момента по сравнению с прототипом. Также, в результате этого, в отличие от прототипа, машина способна запускаться из любого углового положения вала. Дополнительное преимущество исполнения внешней рабочей поверхности поршня в форме цилиндрической поверхности в соответствии с п. 5 формулы состоит в высокой технологичности изготовления поршня.
Предлагаемая расширительная машина может быть выполнена в многомодульном (N-модульном) варианте при повороте звездочек модулей последовательно на расчетный угол . При этом достигается устранение зависимости момента инерции машины от угла поворота выходного вала, но при наличии этой зависимости у отдельного модуля (Приложение 2).
При работе передаточного механизма, содержащего ролики, связанные с поршнями и опирающиеся на звездочку, происходит возвратно-поступательное качение роликов при вращении шарнирно-связанного четырехзвенника. Это обеспечивает передачу момента к валу без трения скольжения. Следовательно, увеличивается долговечность передаточного механизма и надежность расширительной машины в целом, а также снижаются потери на трение, что повышает кпд.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2016 |
|
RU2651106C2 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ С ВНЕШНИМ ПОДВОДОМ ТЕПЛА | 2008 |
|
RU2387844C2 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2007 |
|
RU2374526C2 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2020 |
|
RU2754184C1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1993 |
|
RU2067672C1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2013 |
|
RU2531854C2 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2013599C1 |
| Силовая установка | 1988 |
|
SU1677351A1 |
| РОТОРНО-ПОРШНЕВАЯ МАШИНА | 1992 |
|
RU2044893C1 |
| ПАРОДИЗЕЛЬ | 2016 |
|
RU2644644C1 |
Изобретение относится к роторным расширительным машинам. Машина содержит корпус 1 с камерой 4, имеющей внутреннюю замкнутую цилиндрическую поверхность 5, образующие которой параллельны оси камеры 4, и две торцевые поверхности 6, 7. Камера 4 имеет впускные и выпускные отверстия 8-11, проходящие сквозь корпус 1, вал 12, проходящий через камеру 4 соосно с ней, четыре поршня 13-16, расположенные в камере 4, образующие равносторонний шарнирно связанный четырехзвенник, имеющие каждый рабочую наружную поверхность 17, устройство передачи движения между поршнями 13-16 и валом 12, содержащее жестко связанные с валом 12 вспомогательные направляющие 19-22. Концы поршней 13-16 находятся в плотном скользящем контакте с поверхностью 5 камеры 4, являющейся для них главной направляющей. Поверхность 5 камеры 4 имеет профиль, являющийся внешней эквидистантой, удаленной на расстояние от опорной кривой, описываемой уравнением в полярных координатах. Изобретение направлено на обеспечение равномерного вращательного движения выходного вала и получение постоянного вращающего момента, надежности, высокого момента на валу машины и достижение возможности самозапуска при любом угловом положении вала, повышение равномерности хода вала. 4 з.п. ф-лы, 12 ил.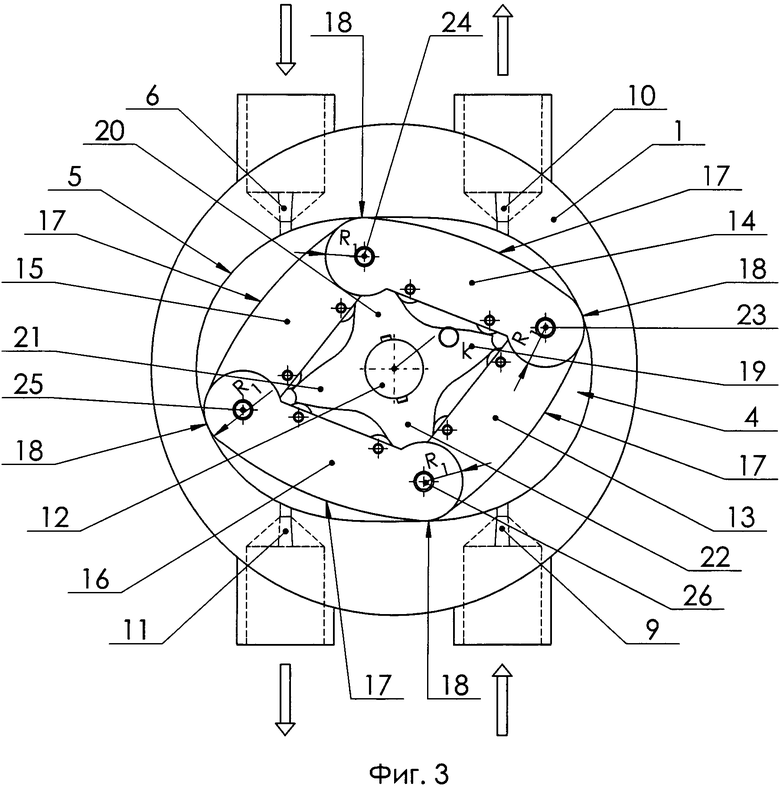
1. Роторная расширительная машина, содержащая корпус с камерой, имеющей внутреннюю замкнутую цилиндрическую поверхность, образующие которой параллельны оси камеры, и две торцевые поверхности, камера имеет впускные и выпускные отверстия, проходящие сквозь корпус, вал, располагающийся в корпусе и проходящий через камеру соосно с ней, четыре поршня, расположенные в камере, образующие равносторонний шарнирно связанный четырехзвенник, имеющие каждый рабочую наружную поверхность, концы поршней находятся в плотном скользящем контакте с внутренней цилиндрической поверхностью камеры, являющейся для них главной направляющей, устройство передачи движения между поршнями и валом, содержащее жестко связанные с валом вспомогательные направляющие, отличающаяся тем, что внутренняя цилиндрическая поверхность камеры имеет профиль, являющийся внешней эквидистантой, удаленной на расстояние R1 от опорной кривой, описываемой уравнением в полярных координатах:

где R1 - радиус скругления конца поршня, равный расстоянию от скользящего контакта поршня с внутренней цилиндрической поверхностью камеры до ближайшей шарнирной оси равностороннего шарнирно связанного четырехзвенника; ρ(α) - полярный радиус с началом полярных координат, расположенным в центре профиля камеры; α=0…2π - полярный угол; L - расстояние между осями шарниров поршня; π - число Пи; ψ - угол между прямыми, соединяющими шарнирные оси соседних поршней; ψmin≥ψopt - задаваемая константа, равная минимальному углу между поршнями в равностороннем шарнирно связанном четырехзвеннике; ψopt - оптимальная величина минимального угла между поршнями ψmin в равностороннем шарнирно связанном четырехзвеннике, которая определяется из уравнения:
ψopt=2tan-1(π-2ψopt).
2. Роторная расширительная машина по п. 1, отличающаяся тем, что устройство передачи движения между поршнями и валом содержит ролики, установленные на внутренней стороне поршней, по два ролика на каждом поршне, опирающиеся на вспомогательные криволинейные направляющие, выполненные в виде четырехконечной звездочки, жестко установленные на валу соосно ему, оси роликов параллельны оси камеры и закреплены на каждом поршне на одинаковых расстояниях: L1 - расстояние от ближайшей шарнирной оси равностороннего шарнирно связанного четырехзвенника, принадлежащей данному поршню, и L2 - расстояние от прямой U, соединяющей середины шарнирных осей поршня; форма отрезка вспомогательной криволинейной направляющей, являющейся опорой для отдельного ролика, представляет цилиндрическую поверхность, образующие которой параллельны оси камеры, а направляющая является эквидистантой, удаленной на расстояние Rr от опорной кривой, описываемой следующими уравнениями в декартовых координатах:

где  , Rr - радиус ролика, α=0…45°; знак «минус» перед L2 соответствует расположению оси ролика между прямой, соединяющей середины шарнирных осей поршня, и валом; знак «плюс» перед L2 соответствует расположению оси ролика между прямой, соединяющей середины шарнирных осей поршня, и внутренней поверхностью камеры.
, Rr - радиус ролика, α=0…45°; знак «минус» перед L2 соответствует расположению оси ролика между прямой, соединяющей середины шарнирных осей поршня, и валом; знак «плюс» перед L2 соответствует расположению оси ролика между прямой, соединяющей середины шарнирных осей поршня, и внутренней поверхностью камеры.
3. Роторная расширительная машина по п. 1, отличающаяся тем, что камера имеет два впускных и два выпускных отверстия, каждая пара впускных отверстий и выпускных отверстий расположена диаметрально противоположно относительно оси камеры в областях между средней и боковой линиями касания поршнем внутренней поверхности камеры при прямом угле между поршнями, при этом впускные и выпускные отверстия расположены по разные стороны от средней линии касания поршнем внутренней поверхности камеры; рабочая наружная поверхность поршня представляет собой цилиндрическую поверхность, образующие которой параллельны оси камеры, а направляющая проходит через три точки касания профиля внутренней поверхности камеры с ближайшей внешней поверхностью поршня при прямом угле между соседними поршнями.
4. Роторная расширительная машина по п. 1, отличающаяся тем, что рабочая наружная поверхность поршня представляет собой цилиндрическую поверхность, образующие которой параллельны оси камеры, а направляющая состоит из трех сопряженных дуг, крайние дуги имеют радиус R1, а средняя дуга имеет радиус R=R1+R2, где радиус R2 определяется уравнением:
5. Роторная расширительная машина по пп. 1-4, отличающаяся тем, что на одном валу установлено N отдельных роторных расширительных машин-модулей, вспомогательные криволинейные направляющие, выполненные в виде четырехконечной звездочки, которых повернуты каждая по оси вала в одном направлении последовательно на угол  , а торцевые стенки камер соседних модулей выполнены общими.
, а торцевые стенки камер соседних модулей выполнены общими.
| US 4181481 A, 01.01.1980 | |||
| Способ магнитной записи и воспроизведения цифровой информации | 1987 |
|
SU1451764A1 |
| US 3295505 A, 03.01.1967 | |||
| ДВИГАТЕЛЬ С КАЧАЮЩИМИСЯ ПОРШНЯМИ | 1997 |
|
RU2161703C1 |
| РОТОРНО-ПОРШНЕВАЯ МАШИНА | 1998 |
|
RU2154737C2 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ С ВНЕШНИМ ПОДВОДОМ ТЕПЛА | 2008 |
|
RU2387844C2 |

