Заявляемое изобретение относится к мобильным (буксируемым или встроенным в автомобиль) измерительным средствам, предназначенным для непрерывного измерения коэффициента сцепления колес с поверхностью взлетно-посадочных полос аэродромов с твердым покрытием, а также может быть использовано для исследования сцепных свойств сооружаемых и эксплуатируемых дорог с твердым покрытием.
Во всем мире авиатранспорт на конечном этапе посадки тормозит колесами и большая или меньшая скользкость искусственного покрытия взлетно-посадочной полосы (ВПП) определяет степень безопасности посадки воздушного судна. При недостаточно эффективном торможении самолет может совершить выбег за пределы ВПП либо потерять в пределах полосы путевую устойчивость и совершить разворот во время торможения (особенно при сильном боковом ветре и (или) неравномерной скользкости покрытия ВПП), а это грозит катастрофой, иногда оканчивающейся полной гибелью воздушного судна с пассажирами и экипажем.
Поэтому для обеспечения безопасности посадки в ненадежных погодных условиях и при наличии таких загрязнителей, как рыхлый или плотный и укатанный снег, изморозь, лед, слякоть, грязь, песок, лужи, стоячая вода, мокрый асфальт, нефтепродукты и резиновые отложения, необходимо проводить предпосадочные оперативные измерения коэффициента сцепления ВПП с целью определения безопасной тормозной дистанции приземляющихся воздушных судов.
В настоящее время метод непрерывного предпосадочного оперативного контроля фрикционных свойств ВПП путем прокатывания специального измерительного колеса по поверхности ВПП вдоль по всей ее длине туда и обратно с принудительным торможением его с постоянным скольжением и одновременным измерением и индикацией текущих значений коэффициента сцепления регламентирован в мире Руководствами национальных агентств гражданской авиации всех ведущих стран мира, например, Циркуляр ИКАО «Состояние поверхности ВПП: оценка, измерение и представление данных». Международная ассоциация гражданской авиации. (Cir329 - AN/191-ICAO). - 2012.
Известны широко распространенные в зарубежной практике измерений коэффициента сцепления колес с аэродромными покрытиями способ и устройство измерения трения покрытий, внедряемые компанией ASFT SAAB-Scania АВ, Швеция (патент US 4098111, МПК G01N 19/2, опубликовано 04.07.1978 «Метод и устройство для измерения коэффициента сцепления ВПП»). Известное устройство представляет собой агрегат, расположенный на двухосной буксируемой тележке или встроенный в автомобиль. Оно содержит механическую измерительную систему с измерительным колесом специального исполнения, измерительными датчиками, преобразующими величины измеряемых сил в электрические сигналы, и электронный блок с регистрирующим устройством, в котором указанные электрические сигналы преобразуются в искомую величину коэффициента сцепления. В механическую измерительную систему входят двухступенчатый цепной редуктор, размещенный в составном шарнирно сочлененном корпусе, измерительный датчик, установленный в ступице измерительного колеса, дифференциал и полуоси, размещенные в жесткой балке заднего моста, и задающие колеса, роль которых выполняют неведущие (несущие, опорные) колеса транспортного средства. Измерительный датчик, размещенный в ступице измерительного колеса и представляющий собой тензометрическую систему, измеряет величину усилий, действующих между измерительным колесом и корпусом редуктора в вертикальной и горизонтальной плоскостях. Нагружение измерительного колеса вертикальной силой осуществляется грузом, шарнирно закрепленным на кузове автомобиля и воздействующим на измерительное колесо через упругую стойку, корпус редуктора и ступицу измерительного колеса с измерительным датчиком. Нагружение измерительного колеса крутящим моментом, обеспечивающим ему заданную величину проскальзывания относительно поверхности дорожного (аэродромного) покрытия, осуществляется от задних колес автомобиля, размещенных на жесткой балке заднего моста, через полуоси, проходящие внутри этой балки, дифференциал, вращающийся относительно балки в подшипниках, и двухступенчатый цепной редуктор, ведущая звездочка которого закреплена на коробке дифференциала, а ведомая - на выходном валу редуктора, соединенном с измерительным колесом.
Существенным недостатком этого устройства является то, что оно, подобно подавляющему большинству аналогичных устройств непрерывного измерения коэффициента сцепления, имеет механическую систему нагружения (торможения) измерительного колеса, которая прокатывает его с постоянным значением скольжения, задаваемым кинематически с помощью понижающего редуктора, связывающего несущие колеса устройства с измерительным колесом. При равномерном движении такого устройства по ВПП измерительное колесо прокатывается принудительно равномерно с раз и навсегда кинематически заданным постоянным скольжением, и поэтому в нем нельзя управлять режимами торможения, что далеко не соответствует действительным режимам торможения колес транспортных средств, осуществляемым их автоматами торможения. Следовательно, измерения, производимые с помощью такого устройства, могут приводить к значительным ошибкам прогнозирования тормозного пути.
Известно устройство (RU 2259569 Низовой А.В., Луканов Н.И. Устройство для определения коэффициента сцепления колеса с аэродромным покрытием. Опубл. 27.08.2005.), в котором для управляемого торможения в процессе буксировки измерительного колеса электрической машины постоянного тока с независимым возбуждением, механически соединенной с измерительным колесом и электрически включенной на активную (реостатную) нагрузку, управление торможением осуществляется через обмотку возбуждения электрической машины, а независимый груз обеспечивает нормальную прижимную силу нагрузки Pr на измерительное колесо.
В процессе измерений системой автоматического управления осуществляется поиск максимального значения коэффициента сцепления (μмакс), которое вычисляется путем измерения максимальной силы продольного динамического торможения измерительного колеса по поверхности аэродромного покрытия, получаемой при работе электрической машины постоянного тока в генераторном режиме динамического (реостатного) торможения, когда максимальная механическая сила сцепления Pсцеп.макс измерительного колеса превращается в электрическую и выделяется в виде тепловой энергии в блоке активной нагрузки. При этом максимальный коэффициент сцепления μмакс вычисляется по формуле

Режим поиска состоит в равномерном увеличении тока генератора на активной нагрузке, соответственно увеличивается тяговая сила, достигая значения силы страгивания измерительного колеса относительно поверхности ВПП, и дальнейшее увеличение тяговой силы приводит к началу проскальзывания (пробуксовки) измерительного колеса S≥0.
В описании технического решения утверждается, что наибольшей силы сцепления измерительное колесо достигает не в момент начала пробуксовки (S=0+0), а при наличии скольжения, равном 0,1-0,2. Как только рост тяговой силы, измеряемой измерительным элементом, при плавном увеличении скольжения прекращается, это соответствует, по мнению авторов, максимальному значению тяговой силы торможения измерительного колеса и, следовательно, максимальной силе его сцепления с поверхностью аэродромного покрытия, а значит, и максимальному значению коэффициента сцепления μмакс, которое вычисляется по формуле (*) и регистрируется. При этом осуществляется дискретное измерение максимальной величины коэффициента сцепления на локальном участке ВПП и утверждается, что измерение производится в соответствии с требованиями ICAO.
Однако данное техническое решение обладает рядом недостатков, наиболее существенными из которых для нашего изложения являются следующие:
- Главная особенность технического решения состоит в дискретном действии системы торможения измерительного колеса и дискретном определении максимального значения продольного коэффициента сцепления μмакс колеса с аэродромным покрытием. Однако дискретное действие системы электромеханического торможения измерительного колеса, связанное с измерением скольжения в перемежающихся режимах поиска и слежения, противоречат требованиям ICAO, FAA и РЭГА РФ-94, регламентирующим методику непрерывного процесса измерения КС с постоянным значением скольжения, взятым из диапазона 0,1-0,2.
- При отсутствии режима непрерывного измерения невозможно получить картину распределения значений КС вдоль ВПП с достаточно малым шагом, регламентируемым требованиями ICAO, FAA и РЭГА РФ-94 (с усреднением на отрезках пути измерения не превышающих 2 м), что затрудняет оценку критического пути в условиях ненадежного состояния поверхности ВПП.
- При программировании работы устройства авторы исходят из предположения, что зависимость силы сцепления от скольжения плавно возрастет при изменении скольжения от нуля до 0,2, достигая на этом промежутке максимального значения. Однако на поверхностях, характеризуемых «сухим» трением, сила сцепления может достичь первого максимума в момент страгивания (S=0+0) поверхности измерительного колеса относительно поверхности ВПП, после которого резко убывает, достигает локального минимума, а затем плавно начинает возрастать и на отрезке S=0÷0.2 не достигает второго локального максимума. При этом режим поиска может быть прекращен при обнаружении первого максимума или при не обнаружении локального максимума, и работа устройства нарушается.
- Использование электрических машин постоянного тока, обладающих такими уязвимыми в эксплуатации узлами, как коллекторы и щеточные механизмы, снижает показатели их надежности и уменьшает длительность межремонтных пробегов.
Наиболее близким к заявляемому устройству является устройство по патенту RU 118753 «Устройство измерения коэффициента сцепления транспортных колес с аэродромными и автодорожными покрытиями», опубликовано 27.07.2012.
Принятое за прототип устройство содержит несущую раму, опирающуюся на два несущих колеса, измерительное колесо, блок управления, независимый груз, цепную передачу, тормозной генератор, датчик тока торможения, датчики угловых скоростей измерительного колеса и одного из несущих колес, управляемый трехфазный выпрямитель переменного тока, нагрузочное сопротивление, тензометрическую систему, состоящую из последовательно соединенных тензодатчика и блока преобразования сигналов тензодатчика, и систему автоматического управления скольжением (торможением) измерительного колеса, при этом измерительное колесо установлено в независимой подвеске, один конец которой присоединен к несущей раме посредством первой подшипниковой опоры, имеющей одну степень свободы вращения в вертикальной плоскости, а на другом конце независимой подвески размещено измерительное колесо, независимый груз закреплен на рычаге, присоединенном одним концом к несущей раме посредством второй подшипниковой опоры, а другим концом опирающимся через пружинный амортизатор с демпфером на свободный конец независимой подвески измерительного колеса, тормозной генератор размещен на несущей раме, а его вал с закрепленной на нем звездочкой связан цепной передачей со звездочкой, скрепленной со ступицей измерительного колеса, причем тормозной генератор установлен на несущей раме так, что ось вращения его вала совпадает с осью вращения в первой подшипниковой опоре рычажной подвески, несущей измерительное колесо, в качестве тормозного генератора применена трехфазная синхронная электрическая машина с индуктором, трехфазная обмотка статора тормозного генератора соединена с силовыми входами управляемого трехфазного выпрямителя переменного тока, к силовым выходам которого подключены последовательно соединенные датчик тока торможения и нагрузочное сопротивление, образующие замкнутую цепь выпрямленного тока статора тормозного генератора, датчики угловых скоростей кинематически соединены с измерительным и одним несущим колесами, выход блока управления подключен к первому входу системы автоматического управления скольжением, а выходы датчиков угловых скоростей измерительного и одного из несущих колес и датчика тока торможения подключены соответственно к ее второму, третьему и четвертому входам, а также к первому, второму и третьему входам блока управления, выход системы автоматического управления скольжением соединен с управляющим входом управляемого трехфазного выпрямителя переменного тока, тензодатчик встроен в консоль, закрепленную на независимой подвеске и несущую на свободном конце вспомогательную звездочку, передающую на консоль с тензодатчиком силу натяжения цепи цепной передачи, а выход блока преобразования сигнала тензодатчика подключен к четвертому входу блока управления.
Однако устройство, принятое за прототип, обладает недостатком, заключающимся в недоиспользовании его потенциальных возможностей по повышению точности и достоверности измерений коэффициента сцепления ВПП. А именно, в описании сущности устройства, принятого за прототип, указывается на возможность формирования программного скольжения в виде произвольной функции времени (с учетом ограничений по модулю величины и максимальной скорости изменения), что означает возможность формировать любые (с учетом ограничений) наперед заданные режимы торможения измерительного колеса с помощью управляемой электромеханической системы торможения, тогда как в описании работы устройства рассматривается только режим измерения с торможением измерительного колеса с постоянным скольжением, а вопросы разработки на базе принятого за прототип устройства технологии измерений с применением более сложных режимов торможения измерительного колеса, приближающихся к реальным режимам торможения колес приземляющихся воздушных судов, даже не обсуждаются.
Техническим результатом, на достижение которого направлено заявляемое устройство, является повышение точности и достоверности измерений коэффициента сцепления ВПП, базирующееся на имитации измерительным колесом в процессе измерения коэффициента сцепления ВПП антиблокировочных режимов торможения, близких к реальным режимам торможения колес приземляющихся воздушных судов, осуществляемым самолетными тормозными системами.
Устройство измерения коэффициента сцепления колес воздушных судов с покрытием взлетно-посадочных полос, содержащее несущую раму, опирающуюся на два несущих колеса, измерительное колесо, компьютерный пульт управления и индикации, независимый груз и цепную передачу, тормозной генератор, датчик тока торможения, датчики угловых скоростей измерительного колеса и одного из несущих колес и систему автоматического управления скольжением измерительного колеса, измерительное колесо установлено в независимой подвеске, один конец которой связан с несущей рамой посредством шарнирной опоры, имеющей одну вращательную степень свободы в вертикальной плоскости продольной симметрии несущей рамы, а на свободном конце независимой подвески размещена ступица с измерительным колесом, независимый груз закреплен на рычаге, присоединенном одним концом шарнирно к раме, а вторым концом опирающимся через пружинный амортизатор с демпфером на свободный конец независимой подвески измерительного колеса, вал тормозного генератора с закрепленной на нем звездочкой связан цепной передачей со звездочкой ступицы измерительного колеса, причем тормозной генератор установлен на раме так, что его ось вращения совпадает с осью вращения в шарнирной опоре независимой подвески, несущей измерительное колесо, датчики угловых скоростей кинематически соединены с измерительным и несущим колесами, первый выход компьютерного пульта управления и индикации подключен к первому входу системы автоматического управления скольжением, выходы датчиков угловых скоростей измерительного и несущего колес и датчика тока торможения подключены соответственно к ее второму, третьему и четвертому входам, а также к первому, второму и третьему входам компьютерного пульта управления и индикации, причем в устройство также введены управляемый трехфазный выпрямитель переменного тока, нагрузочное сопротивление и тензометрическая система, состоящая из последовательно соединенных измеряющего силу натяжения цепи тензодатчика в корпусе с узлом крепления к независимой подвеске и блока преобразования сигналов тензодатчика, в качестве тормозного генератора применена трехфазная синхронная электрическая машина с индуктором, трехфазная обмотка статора тормозного генератора соединена с силовыми входами управляемого трехфазного выпрямителя переменного тока, к силовым выходам которого подключены последовательно соединенные датчик тока торможения и нагрузочное сопротивление, образуя замкнутую цепь управляемого выпрямленного тока статора тормозного генератора, выход системы автоматического управления скольжением соединен с управляющим входом управляемого трехфазного выпрямителя переменного тока, а выход блока преобразования сигнала тензодатчика подключен к четвертому входу компьютерного пульта управления и индикации, причем в устройство также дополнительно введен блок корреляции результатов измерения коэффициента сцепления покрытия с реальной характеристикой торможения колес приземляющегося воздушного судна, первый, второй и третий входы которого соединены соответственно со вторым, третьим и четвертым выходами компьютерного пульта управления и индикации, а его первый и второй выходы подключены соответственно к пятому и шестому входам компьютерного пульта управления и индикации.
Блок корреляции результатов измерения коэффициента сцепления покрытия с реальной характеристикой торможения колес приземляющегося воздушного судна содержит компьютерное рабочее место командно-диспетчерского пункта аэродрома, блок экспертной оценки, программатор антиблокировочных режимов торможения и блок вычисления коэффициента корреляции коэффициента сцепления, первый, второй и третий входы компьютерного рабочего места командно-диспетчерского пункта соединены GSM-каналами соответственно с первым, вторым и третьим входами блока корреляции результатов измерения коэффициента сцепления, выход компьютерного рабочего места командно-диспетчерского пункта соединен GSM-каналом с первым входом блока экспертной оценки, второй вход блока экспертной оценки и первый вход блока вычисления коэффициента корреляции коэффициента сцепления соединены с первым входом блока корреляции результатов измерения коэффициента сцепления, первый выход блока экспертной оценки соединен со входом программатора антиблокировочных режимов торможения, выход которого подключен к первому выходу блока корреляции результатов измерения коэффициента сцепления, второй вход блока корреляции результатов измерения коэффициента сцепления и второй выход блока экспертной оценки подключены соответственно ко второму и третьему входам блока вычисления коэффициента корреляции коэффициента сцепления, а выход последнего соединен со вторым выходом блока корреляции результатов измерения коэффициента сцепления.
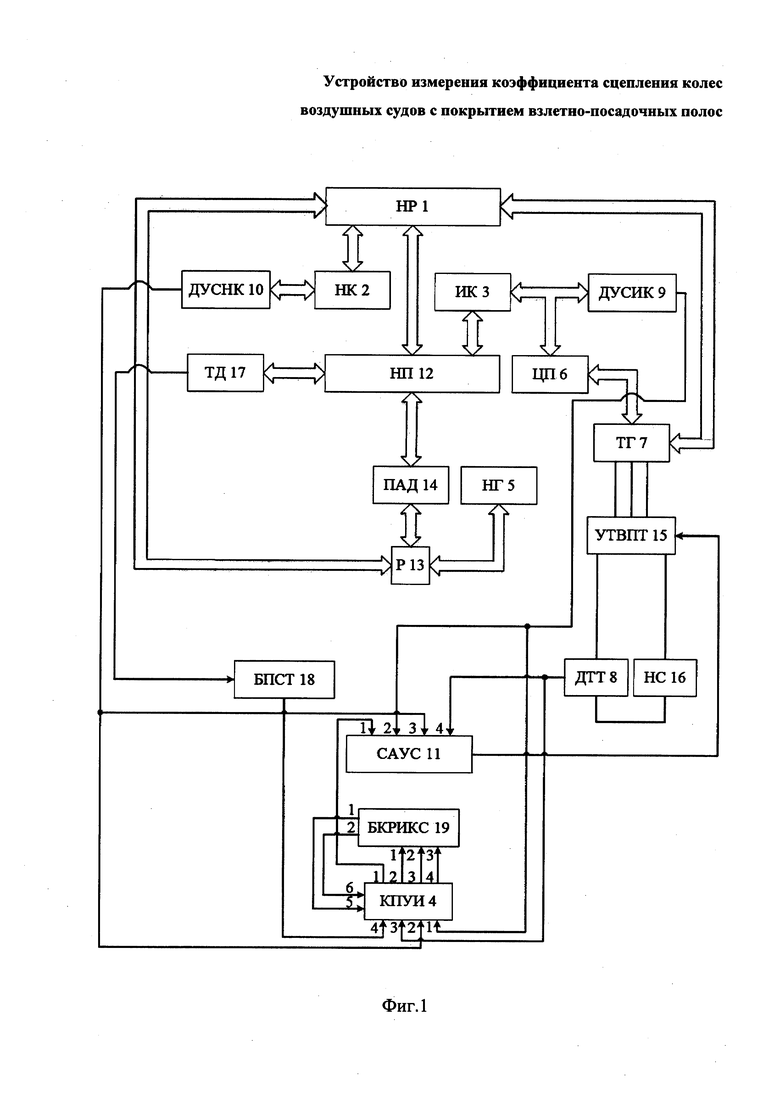
На фиг. 1 показана функциональная схема устройства измерения коэффициента сцепления колес воздушных судов с покрытием взлетно-посадочных полос.
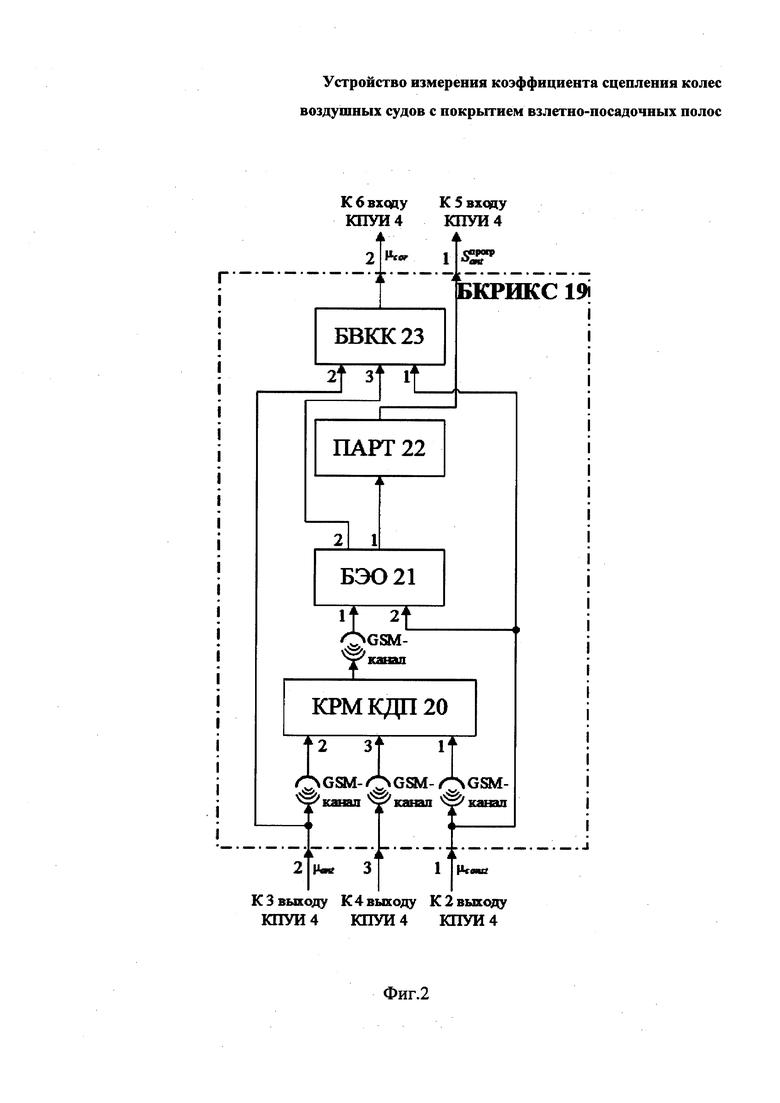
На фиг. 2 показана функциональная схема блока корреляции результатов измерения коэффициента сцепления.
На фиг. 1 и фиг. 2 цифрами и буквами обозначены составные части заявляемого устройства:
1 - HP - несущая рама;
2 - НК - несущие колеса;
3 - ИК - измерительное колесо;
4 - КПУИ - компьютерный пульт управления и индикации;
5 - НГ - независимый груз;
6 - ЦП - цепная передача;
7 - ТГ - тормозной генератор;
8 - ДТТ - датчик тока торможения;
9 - ДУС ИК - датчик угловой скорости измерительного колеса;
10 - ДУС НК- датчик угловой скорости несущего колеса;
11 - САУС - система автоматического управления скольжением;
12 - НП - независимая подвеска;
13 - Р - рычаг независимого груза;
14 - ПАД - пружинный амортизатор с демпфером;
15 - УТВПТ - управляемый трехфазный выпрямитель переменного тока;
16 - НС - нагрузочное сопротивление;
17 - ТД - тензометрический датчик;
18 - БПСТ - блок преобразования сигнала тензодатчика;
19 - БКРИКС - блок корреляции результатов измерения коэффициента сцепления;
20 - КРМ КДП - компьютерное рабочее место командно-диспетчерского пункта аэродрома;
21 - БЭО - блок экспертной оценки;
22 - ПАРТ - программатор антиблокировочных режимов торможения;
23 - БВКК - блок вычисления коэффициента корреляции коэффициента сцепления.
Устройство измерения коэффициента сцепления колес воздушных судов с покрытием взлетно-посадочных полос (см. фиг. 1) содержит несущую раму (HP) 1, опирающуюся на два несущих колеса (НК) 2, измерительное колесо (ИК) 3, управляемую электромеханическую систему торможения (УЭМСТ), компьютерный пульт управления и индикации (КПУИ) 4, независимый груз (НГ) 5 и цепную передачу (ЦП) 6, управляемая электромеханическая система торможения (УЭМСТ) состоит из тормозного генератора (ТГ) 7, датчика тока торможения (ДТТ) 8, датчиков угловых скоростей измерительного колеса (ДУС ИК) 9 и одного из несущих колес (ДУС НК) 10 и системы автоматического управления скольжением (САУС) 11 измерительного колеса 3, измерительное колесо 3 установлено в независимой подвеске (НП) 12, связанной одним концом с несущей рамой 1 шарнирной опорой, имеющей одну вращательную степень свободы в вертикальной плоскости продольной симметрии несущей рамы, а на ее свободном конце размещена ступица с измерительным колесом 3, которое во время движения непрерывно прокатывается вдоль тестируемого покрытия с торможением, осуществляемым управляемой электромеханической системой торможения, вертикальное нагружение измерительного колеса 3 создается независимым грузом 5, который закреплен на рычаге (Р) 13, присоединенном одним концом шарнирно к несущей раме 1, а вторым концом опирающимся через пружинный амортизатор с демпфером (ПАД) 14 на свободный конец независимой подвески 12 измерительного колеса 3, торможение измерительного колеса 3 в рамках управляемой электромеханической системы торможения осуществляется тормозным генератором 7, вал которого с закрепленной на нем звездочкой связан через цепную передачу 6 со звездочкой ступицы измерительного колеса 3, причем тормозной генератор 7 установлен на несущей раме 1 так, что его ось вращения совпадает с осью вращения в шарнирном соединении независимой подвески 12, несущей измерительное колесо 3, чтобы при качании подвески во время прокатывания измерительного колеса 3 исключалось возникновение дополнительных нагрузок на цепную передачу 6, датчики угловых скоростей 9 и 10 кинематически соединены соответственно с измерительным 3 и несущим 2 колесами, первый выход компьютерного пульта управления и индикации 4, вырабатывающий сигнал заданного (программного) скольжения, подключен к первому входу системы автоматического управления скольжением 11, выходы датчиков угловых скоростей 9 и 10 измерительного 3 и несущего 2 колес и датчика тока торможения 8 подключены соответственно к ее второму, третьему и четвертому входам, а также к первому, второму и третьему входам компьютерного пульта управления и индикации 4, устройство также содержит управляемый трехфазный полупроводниковый выпрямитель переменного тока (УТВПТ) 15, нагрузочное сопротивление (НС) 16 и тензометрическую систему (ТС), состоящую из последовательно соединенных измеряющего натяжения цепи тензодатчика (ТД)17 в корпусе с узлом закрепления на независимой подвеске 12 и блока преобразования сигнала тензодатчика (БПСТ) 18, в качестве тормозного генератора 7 применена трехфазная синхронная электрическая машина с индуктором, выполненным на высокостабилизированных магнитах, трехфазная обмотка статора тормозного генератора 7 через управляемый трехфазный выпрямитель переменного тока 15 подключена к последовательно соединенным датчику тока торможения 8 и нагрузочному сопротивлению 16, образуя замкнутую цепь выпрямленного управляемого тока торможения тормозного генератора 7, а выход системы автоматического управления скольжением 11, вырабатывающей сигнал управления, соединен с управляющим входом управляемого трехфазного выпрямителя переменного тока 15, тензодатчик 17 установлен в изгиб консоли, закрепленной на независимой подвеске 12 и несущей вспомогательную звездочку, передающую на консоль силу натяжения цепи цепной передачи 6, выход блока преобразования сигнала тензодатчика 18 подключен к четвертому входу компьютерного блока управления и индикации 4, причем в устройство дополнительно введен блок корреляции результатов измерения коэффициента сцепления (БКРИКС) 19 покрытия с реальной характеристикой торможения колес приземляющегося воздушного судна, первый, второй и третий входы которого соединены соответственно со вторым, третьим и четвертым выходами компьютерного блока управления и индикации 4, а его входы подключены к пятому и шестому входам компьютерного блока управления и индикации 4.
Блок корреляции результатов измерения коэффициента сцепления 19 (см. фиг. 2) содержит компьютерное рабочее место командно-диспетчерского пункта (КРМКДГТ) 20 аэродрома, блок экспертной оценки (БЭО) 21, программатор антиблокировочных режимов торможения (ПАРТ) 22 и блок вычисления коэффициента корреляции (БВКК) 23 коэффициента сцепления, первый, второй и третий входы компьютерного рабочего места командно-диспетчерского пункта (КРМ КДП) 20 соединены GSM-каналами соответственно со вторым, третьим и четвертым выходами компьютерного пульта управления и индикации (КПУИ) 4, которые являются одновременно первым, вторым и третьим входами блока корреляции результатов измерения коэффициента сцепления 19, выход компьютерного рабочего места командно-диспетчерского пункта 20 соединен GSM-каналом с первым входом экспертной оценки (БЭО) 21, второй вход блока экспертной оценки 21 и первый вход блока вычисления коэффициента корреляции (ВБКК) 23 коэффициента сцепления соединены с первым входом блока корреляции результатов измерения коэффициента сцепления 19, (или, что то же, со вторым выходом компьютерного пульта управления и индикации 4), первый выход блока экспертной оценки 21 соединен со входом программатора антиблокировочных режимов торможения (ПАРТ) 22, выход которого подключен к пятому входу компьютерного пульта управления и индикации 4, который является одновременно первым выходом блока корреляции результатов измерения коэффициента сцепления 19, второй вход блока корреляции результатов измерения коэффициента сцепления 19 (или, что то же, третий выход компьютерного пульта управления и индикации 4) и второй выход блока экспертной оценки 21 подключены соответственно ко второму и третьему входам блока вычисления коэффициента корреляции 23 коэффициента сцепления, а выход последнего соединен с шестым входом компьютерного пульта управления и индикации 4, являясь одновременно вторым выходом блока корреляции результатов измерения коэффициента сцепления 19.
Сущность предлагаемого устройства измерения коэффициента сцепления колес воздушных судов с покрытием взлетно-посадочных полос состоит в том, что измерительное колесо 3, расположенное на свободном конце независимой подвески 12, присоединенной другим концом к несущей раме 1 буксируемого измерительного колеса 3 посредством шарнирного соединения, имеющего одну вращательную степень свободы в вертикальной плоскости продольной симметрии комплекса, нагружают с помощью независимого груза 5 нормальной к исследуемой поверхности покрытия силой Fнорм и вместе с несущими колесами 2 катят по исследуемой поверхности с постоянной поступательной (линейной) скоростью Vлин, причем несущие колеса 2 катятся свободно без скольжения, а измерительное колесо 3 прокатывают с управляемым торможением, осуществляемым в рамках управляемой электромеханической системы торможения. Для этого к измерительному колесу 3 присоединяют тормозной генератор 7, связывая его вал с закрепленной на нем звездочкой цепной передачей 6 со звездочкой ступицы измерительного колеса 3. Тем самым, вал тормозного генератора 7 приводится в движение через измерительное колесо 3 силой тяги Fтяги буксировочного автомобиля, преодолевающей касательную к окружности измерительного колеса 3 продольную силу трения скольжения Fтр, действующую вдоль исследуемой поверхности покрытия на площадь («пятно») контакта измерительного колеса 3 с покрытием в направлении, противоположном направлению буксирования. Управляя развиваемым электромагнитным моментом торможения Mторм тормозного генератора 7, формируют заданное (программное) значение (или заданную функцию) скольжения Sпрогр(t).
Мгновенные значения скольжения S измерительного колеса (полагая, что несущие колеса вращаются свободно без скольжения) вычисляют по соотношению

где ωик, ωнк - угловые скорости вращения соответственно измерительного колеса и одного из несущих колес, Rик, Rнк - радиусы соответственно измерительного колеса и одного из несущих колес, измеренные с учетом деформации (смятия) пневматических шин колес, Vлин - линейная скорость поступательного движения буксирования; ωикRик - линейная скорость поступательного движения «пятна» контакта измерительного колеса. Отметим, что все переменные величины в формуле (1), в общем случае, суть функции времени, а в силу постоянства скорости буксирования Vлин=const, являются функциями пути L=Vлинt.
Механическая энергия торможения, отбираемая тормозным генератором 7 через измерительное колесо 3 у буксировочного автомобиля, преобразуется (за вычетом электрических и механических потерь) в электрическую энергию торможения.
Управление электрической энергией торможения, или, что то же, управление электромагнитным моментом торможения Мторм, осуществляют с помощью тормозного генератора 7, в качестве которого используется трехфазная синхронная электрическая машина переменного тока с системой возбуждения (индуктором), выполненной на постоянных магнитах, к статорным обмоткам которой через управляемый трехфазный выпрямитель переменного тока 15 подключают нагрузочное сопротивление 16. При правильно организованном управлении с помощью системы автоматического управления скольжением 11 механическая энергия торможения измерительного колеса 3, отнимаемая у буксировочного автомобиля кинематически соединенной с ним синхронной электрической машиной, всегда работающей в генераторном (тормозном) режиме динамического торможения, и преобразуемая (за вычетом собственных потерь) в электрическую энергию трехфазного переменного тока, далее преобразуется с помощью управляемого выпрямителя 15 в электрическую энергию постоянного тока, которая, в свою очередь, полностью превращается в тепловую энергию, выделяемую на нагрузочном сопротивлении 16.
Тормозной электромагнитный момент Мторм, развиваемый синхронным тормозным генератором 7, связан с током торможения Iт зависимостью

являющейся неотъемлемой высокостабильной характеристикой данной синхронной электрической машины 7, данного трехфазного управляемого выпрямителя переменного тока 15 и данного нагрузочного сопротивления 16. Поэтому, управляя с помощью управляемого выпрямителя 15 током торможения Iт, управляют режимами торможения измерительного колеса 3.
Система автоматического управления скольжением 11 осуществляет автоматическое управление скольжением измерительного колеса в рамках управляемой электромеханической системы торможением, а именно, управляя током торможения Iт, а значит, и электромагнитным моментом торможения Мторм тормозного генератора 7, формируют, в силу построения системы автоматического управления скольжением 11, режимы автоматического торможения измерительного колеса 3 с любым наперед заданным программным скольжением, определяемым в некотором допустимом диапазоне значений скольжения в виде постоянного значения

или в виде функции времени, определяющей той или иной антиблокировочный режим торможения

где средняя величина скольжения  ограничена некоторым допустимым диапазоном
ограничена некоторым допустимым диапазоном

принципиально, в силу построения электромеханической системы торможения, не достигающим единицы, что соответствовало бы режиму торможения «юзом», т.е. режиму с полной блокировкой вращения измерительного колеса.
Программные значения скольжения (3), (4) в диапазоне (5) поддерживаются автоматически с заданной точностью в процессе измерения текущих значений коэффициента сцепления измерительного колеса 3 с покрытием независимо от состояния исследуемой поверхности покрытия.
Для обеспечения заданных требований к системе автоматического управления скольжением 11 вводят датчики 9 и 10 угловых скоростей вращения измерительного и одного из несущих колес, чтобы иметь возможность точно вычислять действительные значения скольжения измерительного колеса 3, и датчик тока торможения 8, значения которого однозначно соответствуют, в силу зависимости (8), значениям момента торможения Мторм. Выходы всех введенных датчиков соединяют со входами системы автоматического управления скольжением 11, а также подключают ко входам компьютерного пульта управления и индикации 4, к одному из входов системы автоматического управления скольжением 11 подключают также выход компьютерного пульта управления и индикации 4, вырабатывающего сигнал заданного (программного) скольжения  , а выход системы автоматического управления скольжением 11, вырабатывающей сигнал управления скольжением Uy(t), подключают к управляемому входу управляемого выпрямителя 15.
, а выход системы автоматического управления скольжением 11, вырабатывающей сигнал управления скольжением Uy(t), подключают к управляемому входу управляемого выпрямителя 15.
Достижение заявленного технического результата - повышение точности и достоверности измерений коэффициента сцепления ВПП, базирующееся на имитации измерительным колесом в процессе измерения антиблокировочных режимов торможения, близких к реальным режимам торможения колес приземляющихся воздушных судов, обуславливается реализацией в предлагаемом устройстве новой технологии измерения коэффициента сцепления, предусматривающей, наряду с измерением коэффициента сцепления по общепринятому международными нормами стандартному методу измерения, осуществляемому путем прокатывания измерительного колеса 3 в режиме торможения с постоянным скольжением, проводить дополнительные измерения коэффициента сцепления путем прокатывания измерительного колеса 3 в антиблокировочном режиме торможения, при этом поддерживая значение среднего скольжения за период антиблокировочного цикла торможения, равное значению скольжения в стандартном методе измерения в режиме торможения с постоянным скольжением.
А именно, реализуя в предлагаемом устройстве новую технологию измерения коэффициента сцепления, осуществляют следующие действия:
- измеряют действующую вдоль тестируемого покрытия ВПП на «пятно» контакта измерительного колеса продольную силу Fтр трения скольжения, касательную к окружности измерительного колеса радиуса Rик, и вычисляют мгновенные значения коэффициента сцепления (трения) по формуле

где величиной  обозначены мгновенные значения коэффициента сцепления ВПП, измеренные методом непрерывного прокатывания измерительного колеса, подтормаживая его в режиме с постоянным скольжением S=const (S=0,1 или 0,2). Назовем метод непрерывного измерения коэффициента сцепления ВПП в режиме торможения измерительного колеса с постоянным скольжением стандартным методом.
обозначены мгновенные значения коэффициента сцепления ВПП, измеренные методом непрерывного прокатывания измерительного колеса, подтормаживая его в режиме с постоянным скольжением S=const (S=0,1 или 0,2). Назовем метод непрерывного измерения коэффициента сцепления ВПП в режиме торможения измерительного колеса с постоянным скольжением стандартным методом.
Среднее значение коэффициента сцепления μconst, измеренного в режиме торможения измерительного колеса с постоянным скольжением, вычисленное по всей длине предполагаемой посадочной (тормозной) дистанции ВПП приземляющегося воздушного судна, является стандартной описательной характеристикой коэффициента сцепления покрытия ВПП с загрязнением с той или иной описательной характеристикой указанных выше видов (рыхлый или плотный и укатанный снег, изморозь, лед, слякоть, грязь, песок, лужи, стоячая вода, мокрый асфальт, нефтепродукты и резиновые отложения и др.);
- по данным контрольно-диспетчерского пункта (КДП) аэродрома (и другим источникам) подготавливают обобщенную экспертную информацию об условиях посадки подлетающего воздушного судна, необходимую для обоснования выбора параметров антиблокировочного режима торможения (параметры технических характеристик воздушного судна, параметры технических характеристик самолетной системы торможения колес, описательную характеристику состояния ВПП, включая средний коэффициент сцепления μconst, измеренный в режиме торможения с постоянным скольжением);
- выбирают параметры заданного антиблокировочного режима торможения (скольжения) измерительного колеса (частоту, количество фаз, форму импульсов, величину среднего скольжения за период торможения) и строят или выбирают из меню программатора антиблокировочных режимов торможения программу задаваемого скольжения для осуществления измерений коэффициента сцепления ВПП в антиблокировочном режиме торможения измерительного колеса;
- проводят измерения коэффициента сцепления в антиблокировочном режиме торможения;
- по результатам измерений мгновенных значений коэффициента сцепления  в заданном антиблокировочном режиме торможения вычисляют среднее значение коэффициента сцепления μant, измеренное в антиблокировочном режиме торможения, по всей длине предполагаемой посадочной (тормозной) дистанции приземляющегося воздушного судна;
в заданном антиблокировочном режиме торможения вычисляют среднее значение коэффициента сцепления μant, измеренное в антиблокировочном режиме торможения, по всей длине предполагаемой посадочной (тормозной) дистанции приземляющегося воздушного судна;
- результирующее среднее значение коэффициента сцепления μcor, коррелирующие с реальными характеристиками торможения приземляющегося воздушного судна, рассчитывают в виде средневзвешенной суммы

с весовыми коэффициентами, удовлетворяющими следующим условиям:


где μconst, μant - средние значения коэффициента сцепления, измеренные соответственно в режиме торможения измерительного колеса с постоянным скольжением и в антиблокировочном режиме торможения; α, β - весовые коэффициенты (8), принимающие значения на отрезке [0,1], но в сумме, по смыслу выражения (7), всегда равные единице; kсоr - коэффициент корреляции, выражающийся соотношением (9) между измеренными средними значениями коэффициентов сцепления μconst и μant и зависящий также от принятых значений весовых коэффициентов.
В выражении

в частности, возможны крайние значения коэффициентов α, β, когда:
а) в случае полного учета корреляции
μcor=μant(α=0; β=1);
б) в случае полного пренебрежения корреляцией
μcor=μconst(α=1; β=0).
Подчеркнем, что выбор значений весовых коэффициентов α, β, также как и выбор параметров антиблокировочного режима торможения (частоты, количества фаз, формы импульсов), зависят от экспертных оценок обобщенных характеристик приземляющегося воздушного судна и его самолетной тормозной колесной системы, вида типовой описательной характеристики загрязнения ВПП в момент посадки, а также рекомендаций КДП аэродрома и других доступных учету и экспертной оценке факторов, характеризующих условия посадки приземляющегося воздушного судна.
Для осуществления указанных выше действий в заявляемом устройстве дополнительно вводится блок корреляции результатов измерений коэффициента сцепления 19 аэродромного покрытия с реальной характеристикой торможения колес приземляющегося воздушного судна, первый, второй и третий входы которого соединены соответственно со вторым, третьим и четвертым выходами компьютерного пульта управления и индикации 4, а первый и второй выходы блока корреляции результатов измерения коэффициента сцепления 19 подключены соответственно к пятому и шестому входам компьютерного пульта управления и индикации 4.
Предлагаемое устройство измерения коэффициента сцепления колес воздушных судов с покрытием взлетно-посадочных полос работает следующим образом.
Для выполнения измерений коэффициента сцепления необходимо разместить компьютерный пульт управления и индикации 4 в кабине буксировочного автомобиля, присоединить буксируемое устройство к фаркопу буксировочного автомобиля, протянуть и присоединить к соответствующим разъемам кабель связи от устройства к компьютерному пульту управления и индикации 4 в кабине автомобиля, включить управляемую электромеханическую систему торможения кнопкой, расположенной на несущей раме 1, включить компьютерный пульт управления и индикации 4 при помощи тумблера, расположенного на его корпусе, опустить с помощью ручной лебедки независимую подвеску 12 с измерительным колесом 3 на поверхность тестируемого аэродромного покрытия. Компьютерный пульт управления и индикации 4 представляет собой переносный модуль, выполненный на базе бортового панельного компьютера модели Advantech ТРС 1260Н с цветным сенсорным экраном TFT Color LCD 12,1", оснащен встроенным термопринтером модели FTP-639 MCL354 с шириной бумаги 80 мм, автономным источником питания и информационным разъемом для связи с буксируемым устройством, предназначен для управления программными режимами торможения (скольжения), измерения, вычисления и визуализации графиков и таблиц текущих значений коэффициента сцепления, программной реализации всех функций блока корреляции результатов измерения коэффициента сцепления 19, визуализации на электронной карте, занесенной в память компьютера, маршрутов измерительных проездов буксируемого комплекса, формирования и долгосрочного хранения протоколов в виде цветных диаграмм, цветных графиков, протоколов, нанесенных на цифровую карту, и протоколов в табличном виде распределения измеренных значений коэффициента сцепления вдоль пройденного пути по тестируемому покрытию, а также формирования оперативных протоколов с информацией о результатах измерений с выводом на печать на термопринтер либо для передачи по GSM - каналу на компьютерное рабочее место командно-диспетчерского пункта 20 диспетчеру аэродрома для принятия им решения о безопасной посадке подлетающего воздушного судна.
Для осуществления измерительного проезда измерительный комплекс буксируют с некоторой постоянной линейной скоростью Vлин, при этом ротор (индуктор) тормозного генератора 7 вместе с измерительным колесом 3 вращается с некоторой угловой скоростью ωик и магнитный поток ротора индуцирует в обмотках статора (якоря) электродвижущую силу, возрастающую с ростом угловой скорости измерительного колеса 3, а следовательно, и вращения ротора, при замыкании управляемым выпрямителем 15 цепи нагрузочного сопротивления 16 по ней протекает выпрямленный ток торможения Iт, на валу тормозного генератора 7, работающего в режиме динамического (реостатного) торможения, создается электромагнитный тормозной момент, приложенный к ступице измерительного колеса 3 в направлении, препятствующем буксировке устройства. Под действием системы автоматического управления скольжением 11 на управляющий вход управляемого выпрямителя 15 величина среднего значения тока торможения, а вместе с ним и величина среднего значения момента торможения, возрастают до тех пор, пока величина тормозного момента не превысит величину максимального момента трения покоя в пятне контакта шины измерительного колеса с поверхностью покрытия, возникает скольжение измерительного колеса, величина которого при правильно настроенной системе автоматического управления скольжением 11 достигнет программного значения SПРОГР, предписываемого компьютерным пультом управления и индикации 4.
Таким образом, в процессе непрерывного измерения коэффициента сцепления в рамках предлагаемого устройства с системой автоматического управления скольжением 11 тормозной генератор 7 обеспечивает необходимое торможение измерительного колеса 3 с одновременным автоматическим поддержанием заданного программного скольжения в виде произвольной функции времени SПРОГР(t) предписывающей те или иные программные антиблокировочные режимы торможения, или, в частном случае, в виде постоянной величины SПРОГР=const, выполняемые независимо от величины преодолеваемой продольной силы трения скольжения Fтр(t), приложенной к «пятну» (площадке) контакта шины измерительного колеса 3 с аэродромным покрытием, что обеспечивается автоматически системой автоматического управления скольжения 11 не мгновенно, а во времени с быстродействием и точностью, определяемой структурой системы автоматического управления скольжением 11, построенной, например, в соответствии с патентом на полезную модель RU 130707 «Система управления электромеханическим устройством торможения трансопртных колес», опубл. 27.07.2013.
Высокая точность непрерывного измерения продольной силы трения скольжения Fтр, касательной к пятну контакта шины измерительного колеса 3 с поверхностью аэродромных покрытий, и вычисления текущих и средних значений коэффициентов сцепления μconst и μant в предлагаемом устройстве обеспечивается тензометрической системой 17, 18, состоящей из высокоточного тензометрического датчика 17 (консольной конструкции модели Мерадат К-14А класса точности С3 (с погрешностью менее 0,2%) в корпусе из нержавеющей стали, работающий в диапазоне температур от «минус» 50°С до «плюс» 50°С), и высокоточного и термостабильного блока преобразования сигнала тензодатчика 18, а также компьютерным пультом управления и индикации 4, обеспечивающем программную поддержку вычислений текущих значений коэффициента сцепления по данным измерений тензометрической системы 17, 18.
Блок корреляции результатов измерения коэффициента сцепления 19 работает следующим образом. После первого основного измерительного проезда «туда и обратно» вдоль предполагаемого левого или правого следов колес планируемой посадочной дистанции подлетающего на посадку воздушного судна и получении результата измерения коэффициента сцепления μconst, измеренного стандартным методом в режиме торможения измерительного колеса 3 с постоянным скольжением в компьютерном пульте управления и индикации 4 составляется оперативный протокол стандартных измерений μconst, который передается через первый вход блока корреляции 19 на блок вычисления коэффициента корреляции 23 и одновременно поступает по GSM-каналу на компьютерное рабочее место командно-диспетчерского пункта 20 аэродрома. По результатам стандартных измерений μconst, анализа состояния покрытия ВПП, погодных и других факторов, подвергающих сомнению соответствие результатов стандартных измерений с постоянным скольжением реальным характеристикам торможения подлетающего воздушного судна, на командно-диспетчерском пункте принимается решение о проведении дополнительных измерений с целью корреляции результатов измерений.
На компьютерном рабочем месте командно-диспетчерского пункта 20 в рамках специальной программы составляется формуляр условий посадки, содержащий краткую обобщенную характеристику условий посадки, необходимую для выбора параметров антибокировочного режима торможения, применяемого при дополнительном измерении: основные параметры технических характеристик приземляющегося воздушного судна и его колесных систем торможения, а также обобщенные результаты измерений коэффициента сцепления в режиме торможения с постоянным скольжением, другие данные, отражающие требования оператора командно-диспетчерского пункта аэродрома.
Формуляр условий посадки передается по GSM-каналу из компьютерного рабочего места командно-диспетчерского пункта 20 в блок экспертной оценки 21, в него же одновременно из компьютерного пульта управления и индикации 4 через первый вход блока корреляции 19 передаются данные об измерении коэффициента сцепления μconst стандартным методом с постоянным скольжением.
В блоке экспертной оценки 21 по заданной программе проводится экспертная оценка данных об условиях посадки и составляется формуляр экспертной оценки данных об условиях посадки, на основе которого осуществляется выбор и расчет параметров антиблокировочного режима торможения: частота; количество фаз (число импульсов за период); форма импульсов; среднее значение скольжения за период. Параметры антиблокировочного режима передаются в программатор антибокировочных режима торможения 22. Одновременно из блока экспертной оценки 21 в блок вычисления коэффициента корреляции коэффициента сцепления 23 передается и сам формуляр экспертной оценки данных об условиях посадки.
Программатор 22 формирует вид функции программного скольжения для реализации антиблокировочного режима торможения Sпрогр.ant и передает ее через первый вход блока корреляции 19 в компьютерный пульт управления и индикации 4 для управления процессом измерений в антиблокировочном режиме торможения.
Под управлением компьютерного пульта управления и индикации 4 проводится дополнительный измерительный проезд «туда и обратно» для измерения коэффициента сцепления μant в антиблокировочном режиме торможения измерительного колеса на той же предполагаемой посадочной дистанции (желательно «след в след»), на которой были проведены измерения коэффициента сцепления μconst стандартным методом в режиме торможения с постоянным скольжением.
После обработки компьютерным пультом управления и индикации 4 результатов измерения коэффициента сцепления в антиблокировочном режиме торможения данные измерения коэффициента сцепления μant передаются из компьютерного пульта управления и индикации 4 через первый вход блока корреляции 19 в блок вычисления коэффициента корреляции коэффициента сцепления 23 и одновременно поступают по GSM-каналу на компьютерное рабочее место командно-диспетчерского пункта 20.
В блоке вычисления коэффициента корреляции 23 коэффициента сцепления на основе формуляра экспертной оценки данных об условиях посадки, составленной в блоке экспертной оценки 21, и результатов измерений коэффициентов сцепления в режиме торможения с постоянным скольжением μconst и в антиблокировочном режиме торможения μant, по специальной программе выбираются коэффициенты α, β взвешенной суммы (3) и вычисляется результирующее среднее значение измеренного коэффициента сцепления μcor, коррелирующего с реальной тормозной характеристикой подлетающего на посадку воздушного судна, которое передается на компьютерный пульт управления и индикации 4 для формирования итогового оперативного протокола результатов измерения коэффициента сцепления, коррелирующего с реальной характеристикой торможения подлетающего воздушного судна. Составленный в компьютерном пульте управления и индикации 4 итоговый оперативный протокол результатов измерения через первый вход блока корреляции 19 передается по GSM-каналу на компьютерное рабочее место командно-диспетчерского пункта 20 аэродрома, и на основании его производится оценка безопасной тормозной дистанции для подлетающего воздушного судна с тем, чтобы разрешить или отклонить его посадку.
Таким образом, согласно описанию, главным достоинством, отличающим заявляемое устройство от известных технических решений, является повышение точности и достоверности измерения коэффициента сцепления ВПП, обеспечиваемое осуществлением новой технологии измерения, основанной на имитации измерительным колесом в процессе измерения коэффициента сцепления покрытия антиблокировочных режимов торможения, имитирующих реальные режимы торможения колес воздушного судна при посадке.
Вышесказанное позволяет сделать вывод, что в заявляемом устройстве измерения коэффициента сцепления колес воздушных судов с покрытием взлетно-посадочных полос достигается заявленный технический результат, заключающийся в повышении точности и достоверности измерений коэффициента сцепления ВПП, что позволяет более обоснованно определять расчетную тормозную дистанцию приземляющегося воздушного судна, повышая тем самым безопасность посадки, чем опираясь на измерение общепринятым (стандартным) методом путем прокатывания измерительного колеса в режиме торможения с постоянным скольжением.
Устройство измерения коэффициента сцепления колес воздушных судов с покрытием взлетно-посадочных полос (ВПП) содержит несущую раму, опирающуюся на два несущих колеса, измерительное колесо, компьютерный пульт управления и индикации, независимый груз с рычагом, цепную передачу, тормозной генератор, датчик тока торможения, датчики угловых скоростей измерительного колеса и одного из несущих колес, систему автоматического управления скольжением измерительного колеса, независимую подвеску, пружинный амортизатор с демпфером, управляемый трехфазный выпрямитель переменного тока, нагрузочное сопротивление, тензометрическую систему, блок корреляции результатов измерения коэффициента сцепления покрытия с реальной характеристикой торможения колес приземляющегося воздушного судна. Блок корреляции результатов измерения содержит компьютерное рабочее место командно-диспетчерского пункта аэродрома, блок экспертной оценки, программатор антиблокировочных режимов торможения и блок вычисления коэффициента корреляции коэффициента сцепления, соединенные определенным образом. Обеспечивается повышение точности и достоверности измерений коэффициента сцепления ВПП. 1 з.п. ф-лы, 2 ил. 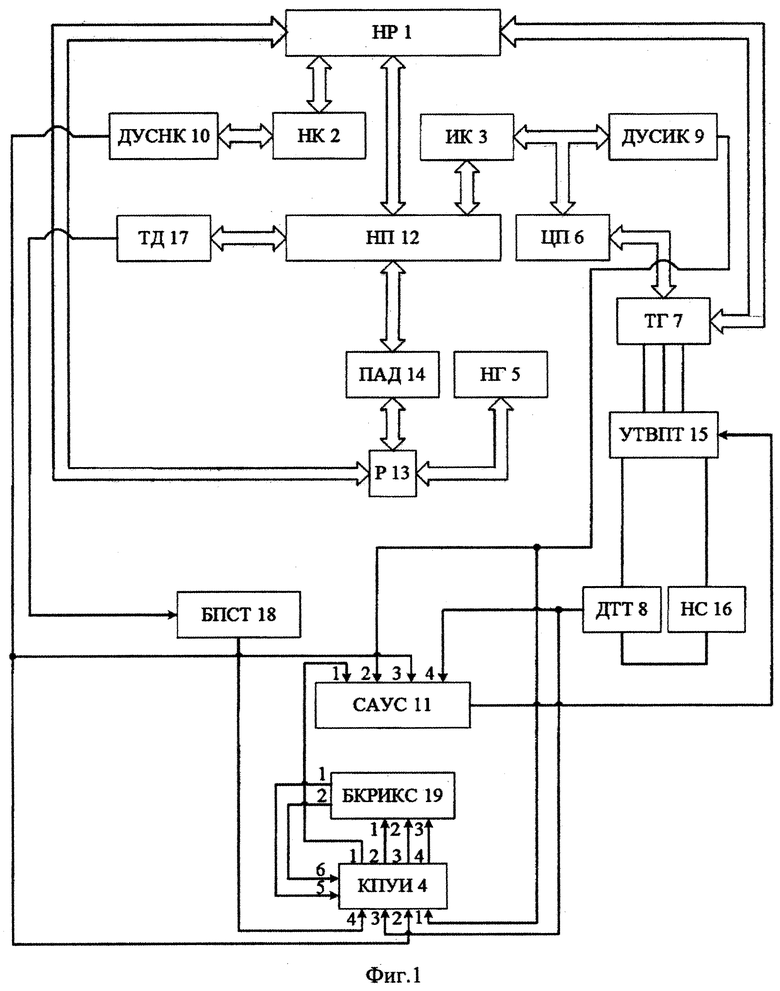
1. Устройство измерения коэффициента сцепления колес воздушных судов с покрытием взлетно-посадочных полос, содержащее несущую раму, опирающуюся на два несущих колеса, измерительное колесо, компьютерный пульт управления и индикации, независимый груз и цепную передачу, тормозной генератор, датчик тока торможения, датчики угловых скоростей измерительного колеса и одного из несущих колес и систему автоматического управления скольжением измерительного колеса, измерительное колесо установлено в независимой подвеске, один конец которой связан с несущей рамой посредством шарнирной опоры, имеющей одну вращательную степень свободы в вертикальной плоскости продольной симметрии несущей рамы, а на свободном конце независимой подвески размещена ступица с измерительным колесом, независимый груз, закрепленный на рычаге, присоединенном одним концом шарнирно к раме, а вторым концом опирающимся через пружинный амортизатор с демпфером на свободный конец независимой подвески измерительного колеса, вал тормозного генератора с закрепленной на нем звездочкой связан цепной передачей со звездочкой ступицы измерительного колеса, причем тормозной генератор установлен на раме так, что его ось вращения совпадает с осью вращения в шарнирной опоре независимой подвески, несущей измерительное колесо, датчики угловых скоростей кинематически соединены с измерительным и несущим колесами, первый выход компьютерного пульта управления и индикации подключен к первому входу системы автоматического управления скольжением, выходы датчиков угловых скоростей измерительного и несущего колес и датчика тока торможения подключены соответственно к ее второму, третьему и четвертому входам, а также к первому, второму и третьему входам компьютерного пульта управления и индикации, устройство также содержит управляемый трехфазный выпрямитель переменного тока, нагрузочное сопротивление и тензометрическую систему, состоящую из последовательно соединенных, предназначенного для измерения силы натяжения цепи тензодатчика в корпусе с узлом крепления к независимой подвеске и блока преобразования сигналов тензодатчика, в качестве тормозного генератора применена трехфазная синхронная электрическая машина с индуктором, трехфазная обмотка статора тормозного генератора соединена с силовыми входами управляемого трехфазного выпрямителя переменного тока, к силовым выходам которого подключены последовательно соединенные датчик тока торможения и нагрузочное сопротивление, образуя замкнутую цепь управляемого выпрямленного тока статора тормозного генератора, выход системы автоматического управления скольжением соединен с управляющим входом управляемого трехфазного выпрямителя переменного тока, а выход блока преобразования сигнала тензодатчика подключен к четвертому входу компьютерного пульта управления и индикации, отличающееся тем, что в устройство дополнительно введен блок корреляции результатов измерения коэффициента сцепления покрытия с реальной характеристикой торможения колес приземляющегося воздушного судна, первый, второй и третий входы которого соединены соответственно со вторым, третьим и четвертым выходами компьютерного пульта управления и индикации, а его первый и второй выходы подключены соответственно к пятому и шестому входам компьютерного пульта управления и индикации.
2. Устройство по п. 1, отличающееся тем, что блок корреляции результатов измерения коэффициента сцепления покрытия с реальной характеристикой торможения колес приземляющегося воздушного судна содержит компьютерное рабочее место командно-диспетчерского пункта аэродрома, блок экспертной оценки, программатор антиблокировочных режимов торможения и блок вычисления коэффициента корреляции коэффициента сцепления, первый, второй и третий входы компьютерного рабочего места командно-диспетчерского пункта соединены GSM-каналами соответственно с первым, вторым и третьим входами блока корреляции результатов измерения коэффициента сцепления, выход компьютерного рабочего места командно-диспетчерского пункта соединен GSM-каналом с первым входом блока экспертной оценки, второй вход блока экспертной оценки и первый вход блока вычисления коэффициента корреляции коэффициента сцепления соединены с первым входом блока корреляции результатов измерения коэффициента сцепления, первый выход блока экспертной оценки соединен со входом программатора антиблокировочных режимов торможения, выход которого подключен к первому выходу блока корреляции результатов измерения коэффициента сцепления, второй вход блока корреляции результатов измерения коэффициента сцепления и второй выход блока экспертной оценки подключены соответственно ко второму и третьему входам блока вычисления коэффициента корреляции коэффициента сцепления, а выход последнего соединен со вторым выходом блока корреляции результатов измерения коэффициента сцепления.
| УСТРОЙСТВО ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ АЭРОДРОМНЫХ И ДОРОЖНЫХ ПОКРЫТИЙ | 2008 |
|
RU2369856C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С АЭРОДРОМНЫМ ПОКРЫТИЕМ | 2004 |
|
RU2259569C1 |
| 0 |
|
SU165080A1 | |
| US 4144748 A1, 20.03.1979 | |||
| US 8707756 B2, 29.04.2014. | |||

