Область техники, к которой относится изобретение.
Изобретение относится к машиностроению, а именно к упругим устройствам.
Уровень техники.
Наиболее близким к изобретению по технической сущности является управляемое упругое устройство, содержащее упругий элемент и систему управления упругостью с нагнетающим устройством (см. патент RU №2646215).
В известной системе упругими элементами являются пружины, что ограничивает возможность управления упругостью.
Раскрытие изобретения.
Задача, на решение которой направлено заявляемое изобретение, заключается в расширении возможностей управления упругостью.
Технический результат заключается в улучшении характеристик регулирования: точности, быстродействия, запаса устойчивости и получения разнообразных функций упругости.
Технический результат обеспечивается следующей совокупностью признаков. Управляемое упругое устройство, содержащее упругий элемент и систему управления упругостью с нагнетающим устройством, отличающееся тем, что упругий элемент выполнен в виде гидроцилиндра, а система управления упругостью состоит из контроллера, связанного с датчиками усилия и перемещения штока гидроцилиндра, и гидрораспределителем с электромагнитным управлением, насоса высокого давления и последовательно соединенного с ним гидроаккумулятора, связанного со входом гидрораспределителя, выход которого связан с над- и подпоршневым пространством гидроцилиндра.
Задача, на решение которой направлено заявляемое изобретение, и технический результат взаимосвязаны следующим образом.
Улучшение характеристик регулирования: точности, быстродействия, запаса устойчивости и получения разнообразных функций упругости - приводит к расширению возможностей управления упругостью.
Краткое описание чертежей.
На фиг. 1 изображена схема управляемого упругого устройства, на фиг. 2-7 - упругие характеристики устройства.
Осуществление изобретения.
Изобретение может быть осуществлено следующим образом.
У управляемого упругого устройства, содержащего упругий упругий элемент и систему управления упругостью с нагнетающим устройством, упругий элемент выполнен в виде гидроцилиндра, а система управления упругостью состоит из контроллера, связанного с датчиками усилия и перемещения штока гидроцилиндра, и гидрораспределителем с электромагнитным управлением, насоса высокого давления и последовательно соединенного с ним гидроаккумулятора, связанного со входом гидрораспределителя, выход которого связан с над- и подпоршневым пространством гидроцилиндра.
Таким образом, назначение изобретения - применение его в качестве управляемого упругого устройства - реализуется.
Сведения, подтверждающие возможность получения при осуществлении изобретения технического результата (причинно-следственная связь существенных признаков с указанным техническим результатом), состоят в следующем.
Выполнение упругого элемента в виде гидроцилиндра и оснащение системы управления упругостью контроллером, связанным с датчиками усилия и перемещения штока гидроцилиндра, приводит к улучшению характеристик регулирования: точности, быстродействия, запаса устойчивости и получения разнообразных функций упругости.
Следовательно, совокупность существенных признаков достаточна для достижения обеспечиваемого изобретением технического результата.
Описание управляемого упругого устройства.
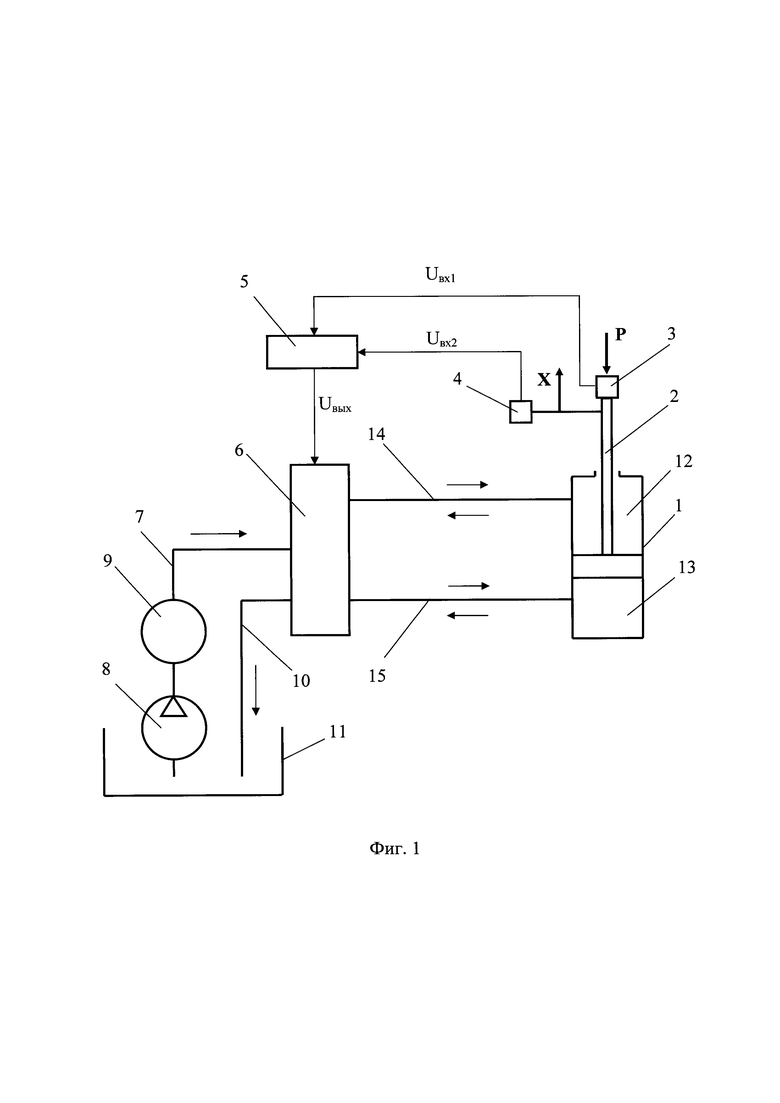
Управляемое упругое устройство (фиг. 1) содержит упругий элемент в виде гидроцилиндра двойного действия 1, на штоке 2 которого установлен датчик усилия 3, на который воздействует внешнее усилие Р, датчик перемещения 4, который реагирует на перемещение X штока 2, датчики 3 и 4 связаны со входом контроллера 5, выход которого связан с гидрораспределителем 6, в напорную магистраль 7 которого последовательно включены насос 8 и гидроаккумулятор 9. Сливная магистраль 10 связана с емкостью 11 для рабочей жидкости. Выход гидрораспределителя 6 связан с надпоршневой 12 и подпоршневой 13 полостями гидроцилиндра 1 напорно-сливными магистралями 14 и 15.
На фиг 2-7 представлена часть функций упругости Р=Р(Х), запрограммированных в контроллере 5. Эти функции могут быть в табулированном виде и/или в виде аналитических выражений.
На фиг. 2 представлена линейная функция упругости. На фиг. 3 представлена функция с квазинулевой упругостью на участке а-b. На фиг. 4 представлена характеристика, реализующая функцию сухого трения

На фиг. 5 представлена ломаная упругая функция в точке Х0. На фиг. 6 - упругая функция с отрицательной жесткостью между точками а и b. На фиг. 7 представлена упругая функция с разрывом первого рода в точке Х0. Здесь при X<Х0 - положительная жесткость, при X>Х0 - отрицательная жесткость.
Управляемое упругое устройство работает следующим образом.
При действии внешнего усилия Р на шток 2 гидроцилиндра 1 датчик 3 преобразует усилие в сигнал Uвх1, передаваемый на вход контроллера 5. Под действием силы Р шток 2 перемещается. Перемещение X преобразуется датчиком 4 в сигнал Uвх2, который поступает на другой вход контроллера 5.
В зависимости от технических и функциональных особенностей устройства контроллер 5 реализует одну из многих заложенных в него функций упругости, часть из которых представлена на фиг. 2-7. При этом каждому усилию Р на штоке 2 соответствует перемещение X, например усилию P1 соответствует перемещение X1, усилию Р2 соответствует перемещение Х2 (фиг. 2).
Если пара сигналов от Р и X, поступивших с датчиков 3 и 4, не соответствует выбранной функции контроллера 5, он формирует управляющей сигнал Uвых на гидрораспределитель 6, который управляет потоками рабочей жидкости в магистралях 14 и 15 таким образом, чтобы устранить рассогласование между заданной и фактической функциями упругости. Например, если при некотором усилии Р перемещение X оказалось больше заданного программой, контроллер 5 формирует управляющий сигнал на подачу рабочей жидкости по магистрали 15 в подпоршневую полость 13 гидроцилиндра 1. При этом жидкость из надпоршевой полости 12 поступает в магистраль 14, через гидрораспределитель 6 по сливной магистрали 10 в емкость 11. Шток 2 поднимается вверх. Процесс регулирования происходит до тех пор, пока не достигается согласованность между заданной и фактической функциями упругости.
Знак функции (1) определяется контроллером 5 по производной  сигнала перемещения X от датчика 4.
сигнала перемещения X от датчика 4.
Таким образом, у предлагаемого управляемого упругого устройства, в отличие от прототипа, расширены возможности управления упругостью.
Эффективность предлагаемого управляемого упругого устройства обусловливается ее простотой и технологичностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОРМОЗ ПРИЦЕПА | 2019 |
|
RU2729334C1 |
| Стенд для динамических испытаний пневматических шин | 1981 |
|
SU993086A1 |
| Подвеска сиденья транспортного средства | 1981 |
|
SU971687A1 |
| Пневмоэлектрогидравлический следящий позиционный привод подачи инструмента | 1974 |
|
SU488450A1 |
| Автоматизированный гидроимпульсный вертикальный вибропресс | 1991 |
|
SU1784395A1 |
| Гидросистема управления рабочими органами шпалоподбивочного устройства | 1990 |
|
SU1761844A1 |
| Почвообрабатывающий агрегат | 1984 |
|
SU1253442A1 |
| ГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО СОЛНЕЧНОГО ТРЕКЕРА | 2021 |
|
RU2769457C1 |
| ТЯГОВО-СЦЕПНОЕ УСТРОЙСТВО МНОГОЗВЕННОГО ТРАНСПОРТНОГО ПОЕЗДА | 1998 |
|
RU2149765C1 |
| Транспортное средство для перевозки крупногабаритных грузов | 1986 |
|
SU1331692A1 |

Изобретение относится к машиностроению. Управляемое упругое устройство содержит упругий элемент в виде гидроцилиндра и систему управления упругостью с нагнетающим устройством. Система управления упругостью состоит из контроллера, связанного с датчиками усилия и перемещения штока гидроцилиндра, и гидрораспределителем с электромагнитным управлением, насоса высокого давления и последовательно соединенного с ним гидроаккумулятора. Гидроаккумулятор связан со входом гидрораспределителя, выход которого связан с над- и подпоршневым пространством гидроцилиндра. Достигается улучшение характеристик регулирования: точности, быстродействия и запаса устойчивости, а также получение разнообразных характеристик упругости. 7 ил.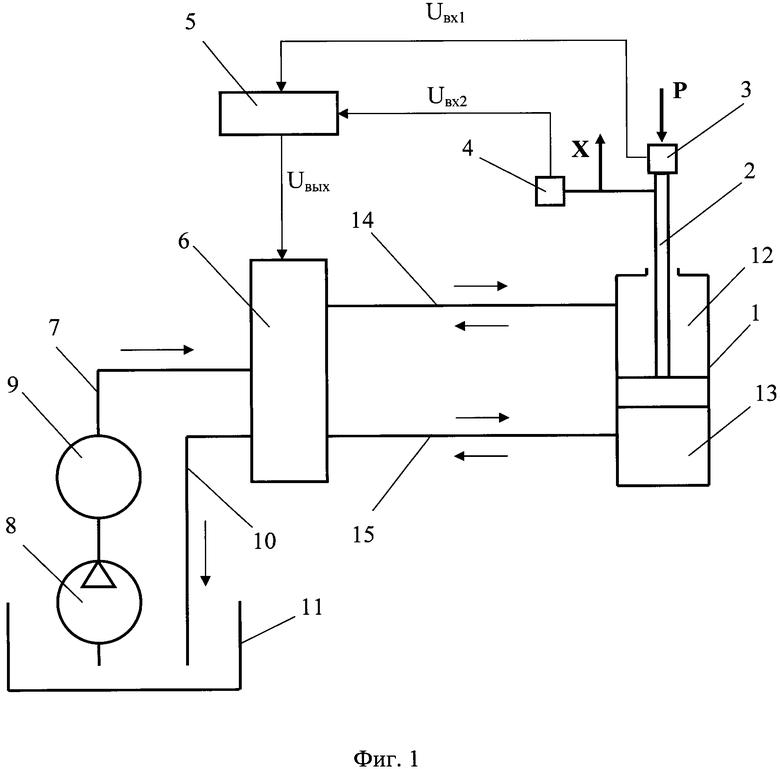
Управляемое упругое устройство, содержащее упругий элемент и систему управления упругостью с нагнетающим устройством, отличающееся тем, что упругий элемент выполнен в виде гидроцилиндра, а система управления упругостью состоит из контроллера, связанного с датчиками усилия и перемещения штока гидроцилиндра, и гидрораспределителем с электромагнитным управлением, насоса высокого давления и последовательно соединенного с ним гидроаккумулятора, связанного со входом гидрораспределителя, выход которого связан с над- и подпоршневым пространством гидроцилиндра.
| Гидравлическая опора силового агрегата с адаптируемыми характеристиками | 2016 |
|
RU2646215C2 |
| Устройство для торможения и останова груза | 1981 |
|
SU1203265A1 |
| Транспортное средство | 1984 |
|
SU1324871A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| US 5682980 A, 04.11.1997 | |||
| US 5862894 A, 26.01.1999. | |||

