Фае.
Изобретение относится к области демпфирования колебаний упругих элементов конструкции объектов и може быть преимущественно использовано п проектировании и создании перспективных систем управления объектами нежесткой конструкции.
Целью изобретения является повышение быстродействия устройства.
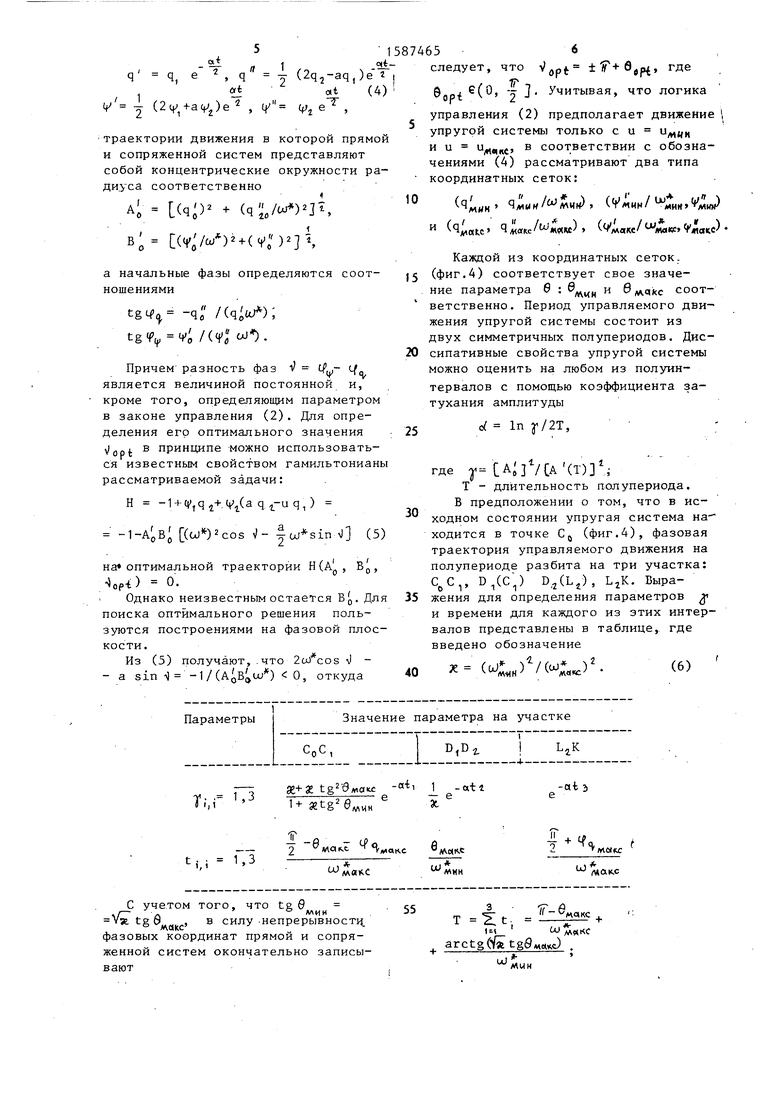
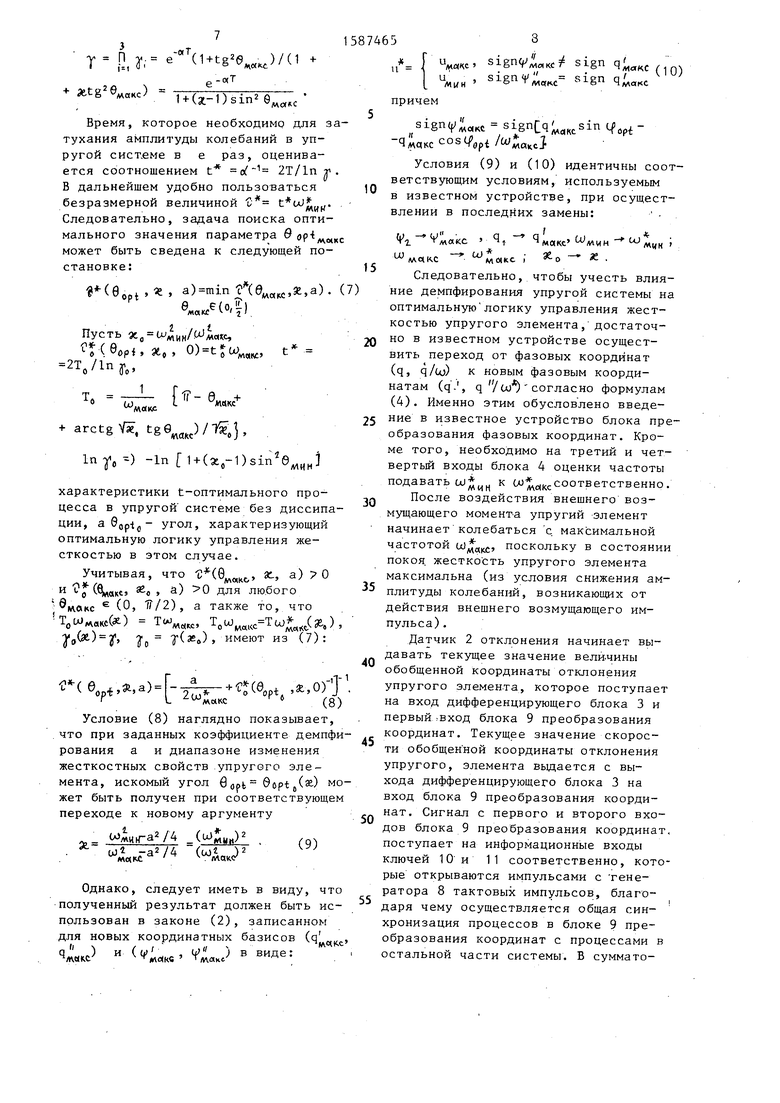
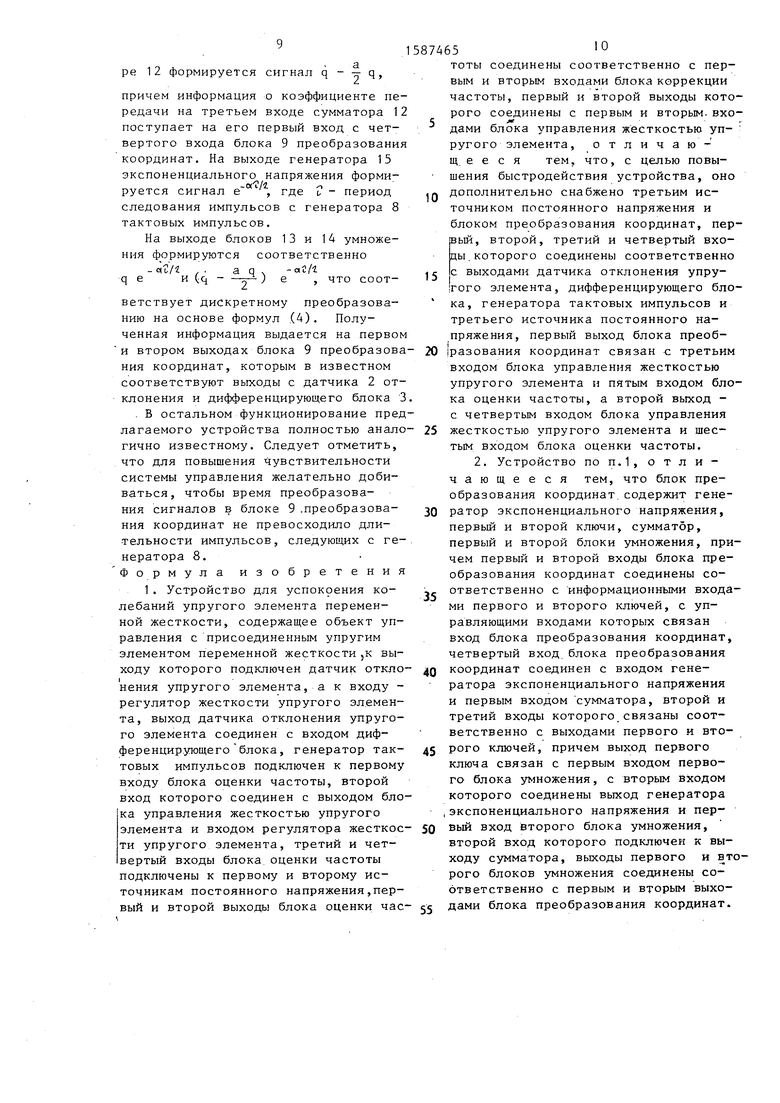
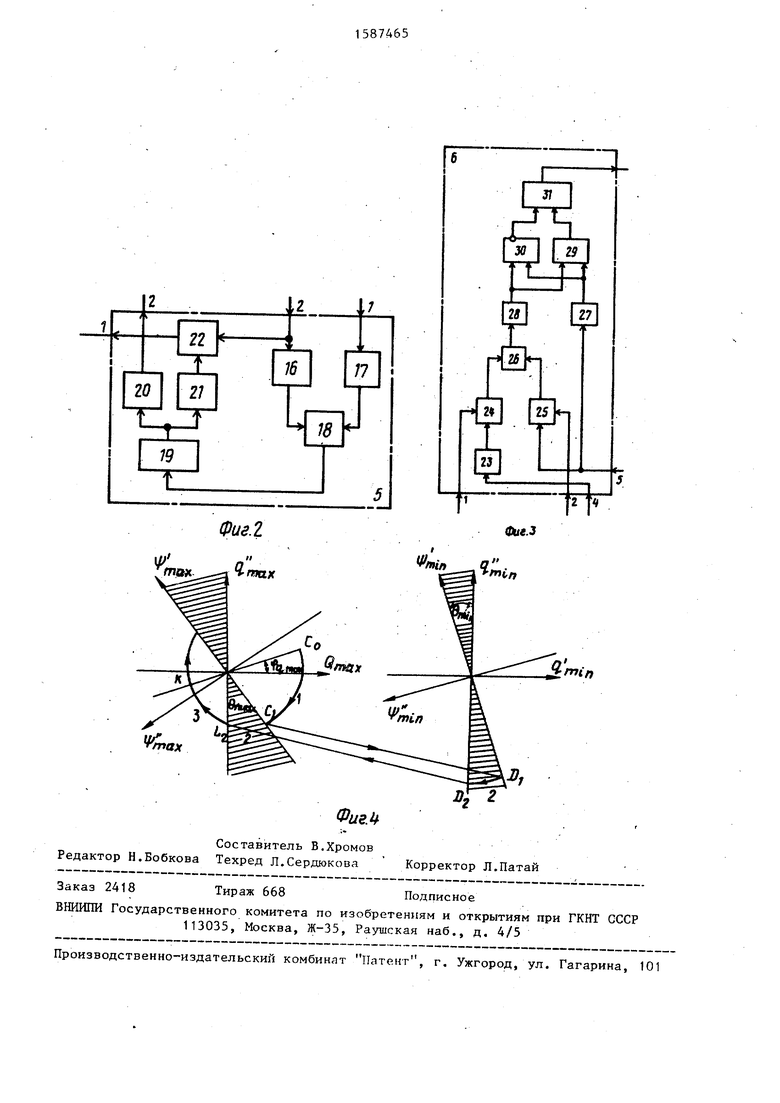
На фиг.1 представлена функциональная схема устройства} на фиг.2 Функциональная схема блока, коррекции частоты- на фиг.З - функциональная схема блока управления жесткостью упругого , элемента; на фиг. 4 координаты фйзовой плоскости и фа зовая траектория упругого элемента.
Устройство для успокоения колебаний упругого элемента переменной жесткости содержит объект 1 управления с присоединенным упругим элементом, датчик 2 отклонения упругого элемента, дифференцирующий блок 3, блок 4 оценки частоты, блок 5 коррекции частоты, блок 6 управления жесткостью упругого элемента, регулятор 7 жесткости, генератор 8 тактовых импульсов, блок 9 преобразования координат. Первый, второй и третий источники постоянного напряжения не показаны.
Блок 9 преобразования координат содержит первый и второй ключи 10 и 11, сумматор 12, первый 13 и второй 14 блоки -умножения, генератор 15 экспоненциального напряжения.
Блок 5 коррекции частоты (фиг.2) содержит два квадратора 16 и 17, делитель 18, нелинейный элемент 19, синусный функциональный преобразователь 20, косинусный функциональный преобразователь 21, второй делитель 22.
Блок 6 (фиг.З) содержит инвертор 23, два делителя 24 и 25 напряжения.
сумматор 26, два релейных элемента 27 и 28, элемент И 29, элемент ИЛИ-НЕ 30, элемент ИЛИ 31.
Устройство работает следующим образом.
Динамика упругого элемента с демпфированием описывается системой дифференциальных уравнений второго порядка:
5
0
5
Ч 2 Я, а uq , (1)
где q , q - фазовые координаты объекта-,
а О - коэффициент демпфирова- г ния i
иб и ин /АИН,
ллокс управляющий параметр j длим; м«кс соответственно минимальная и максимальная частоты собственных колебаний из диапазона возможных изменений.
Ищут t.- оптимальное управление для перевода объекта (1) из состояния (q,(0)q, q,j(0)q,) в точку (0,0).
Структура оптимального управления при а const имеет вид:
30
Гамаке, sign Ц j sign q , sign Ц sign q.
(2)
35
где (f - компонента вектора сопря- . . женных переменных, удовлетворяющих системе
ф, uVj; ф - Ф,- av
Ч(3)
Решение ищут в замкнутой форме. Вводят обозначение 00 и-а /4 (соответственно UJ; 1(ил,„н), w w(.)) И записывают в общем виде решение систем (1) и (3) для случая а - ммн соответствующего колебательному характеру переходных процессов: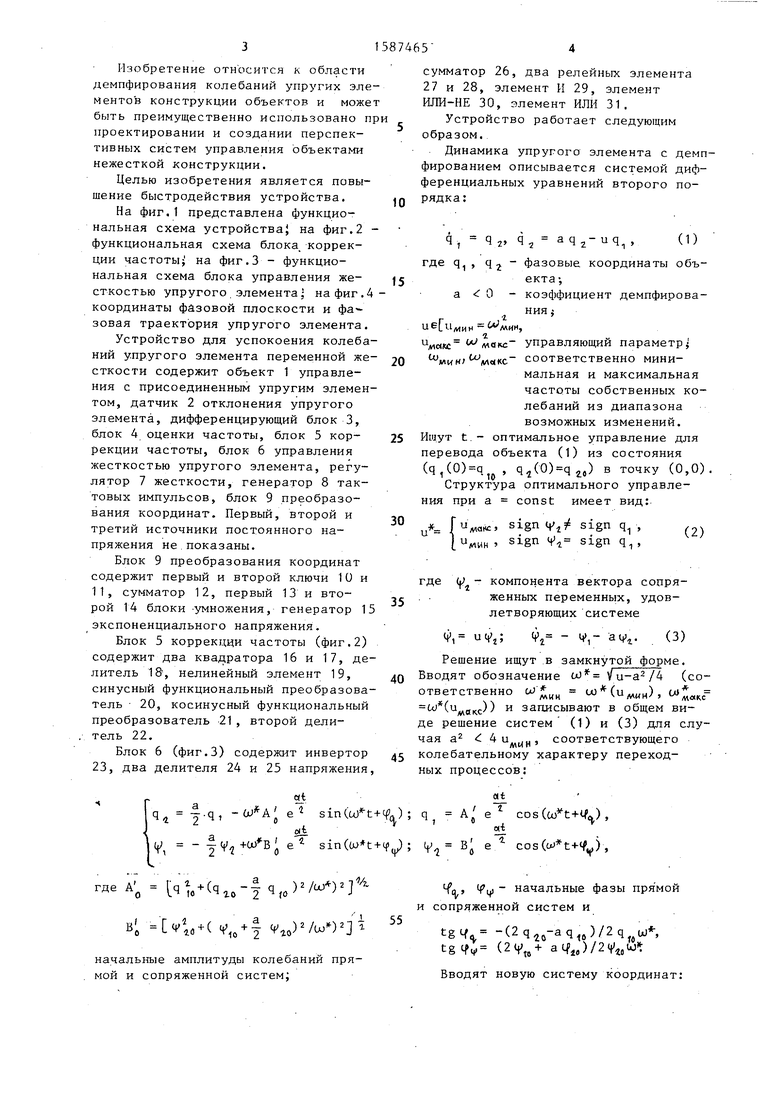
Изобретение относится к демпфированию колебаний упругих элементов конструкции объектов. Целью изобретения является повышение быстродействия устройства. Устройство содержит объект 1 управления с присоединенным упругим элементом, датчик 2 отклонения упругого элемента, дифференцирующий блок 3, блок 4 оценки частоты, блок 5 коррекции частоты, блок 6 управления, регулятор 7 жесткости, генератор 8 тактовых импульсов, блок 9 преобразования координат. 4 ил.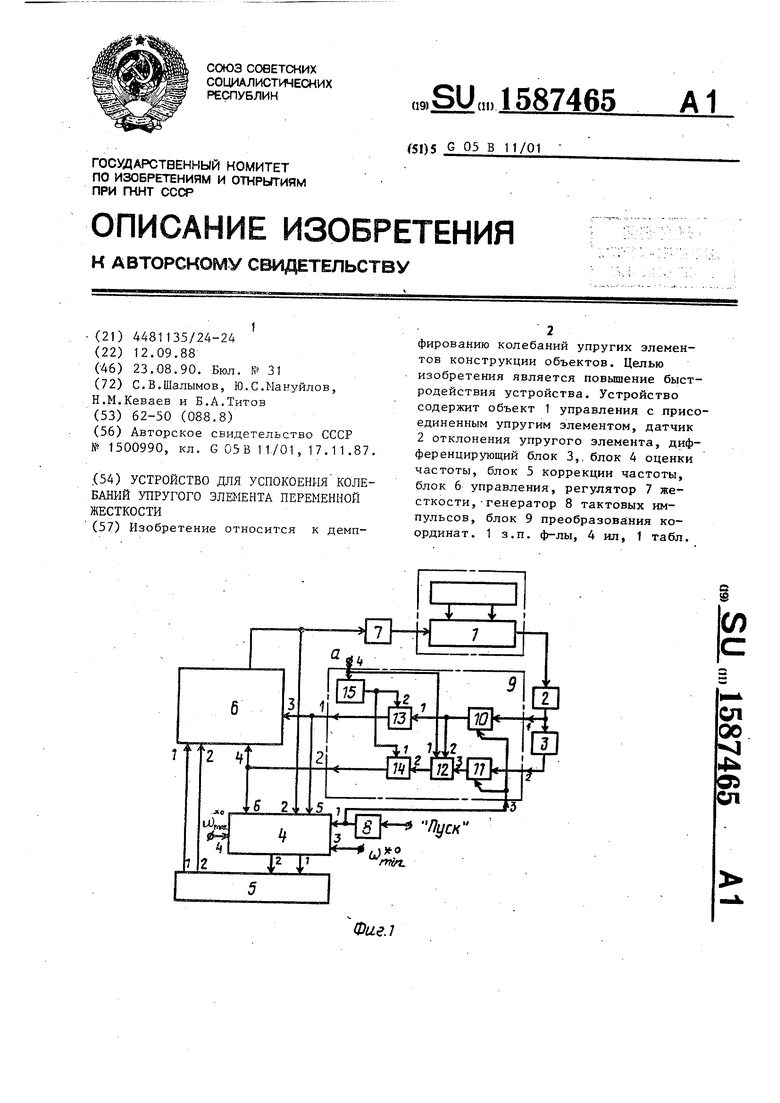
«t
i
q -o-qi e sin((f.); q e cos (),
Sli
V, - e sin(w tH-4i ; ( B e / cos(),
где A; q.()2/a.)2j
B, v ,,+( v.f v«)voo)i
начальные амплитуды колебаний прямой и сопряженной систем;
№i
i
55
.f ы начальные фазы пря мой и сопряженной систем и
tg4 -(2q,j,-aq,,))-, t8tf4. (2Ц „+ aq ),wt
Вводят новую систему координат:
at
q q, e , q у(2q.j-aq,)eT «t «t (4)
V - (2v/avpe2 , , e ,
траектории движения в которой прямой и сопряженной систем представляют собой концентрические окружности ра- ди.уса соответственно
АО (ч) + (,
(/w)-b(4 :)i
а начальные фазы определяются соотношениями
tg4 ( -qo /();
tgf /((f OJ).
Причем разность фаз V с/ является величиной постоянной и, кроме того, определяющим параметром Б законе управления (2). Для определения его оптимального значения Vopt принципе можно использоваться известным свойством гамильтонианы рассматриваемой задачи:
Н -1 + ,.(а ,)
-1-АрВ (cJ)2cos il- (5) ходится в точке С (фиг.4), фазовая
на оптимальной траектории Н(Ар, В,
/lopi) ООднако неизвестным остается Вр, Для поиска оптимального решения пользуются построениями на фазовой плоскости.
Из (5) получают, .что 1 - - а sin -1/() О, откуда
С учетом того, что te. 9
.Г ,° АЛИИ
Уэе. tg У , в силу-непрерывности микс
фазовых координат прямой и сопряженной систем окончательно записывают
87465
следует, что IT
10
V,pt
ept
где
0 , C(0, -j J, Учитывая, что логика
управления (2) предполагает движение , упругой системы только с и ,ц и U , в соответствии с обозначениями (4) рассматривают два типа координатных сеток:
(«н ), (VMHH/I MH« «W) и (Ч;(,«и. Ч««с/ м««) ( Хм«е/ /; «с.К«акс)
Каждой из координатных сеток, (фиг.4) соответствует свое значение параметра б : и 6 соответственно. Период управляемого движения упругой системы состоит из двух симметричных полупериодов. Дис- сипативные свойства упругой системы можно оценить на любом из полуинтервалов с помощью коэффициента затухания амплитуды
0 In ,
где J A jVCA d)
Т - длительность полупериода. В предположении о том, что в исходном состоянии упругая система на-
траектория управляемого движения на полупериоде разбита на три участка: ,, D(C ) D,(Lj), LjK. Выражения для определения параметров и времени для каждого из этих интервалов представлены в таблице, где введено обозначение
.2 --
(н)/К««с)
(6)
T.i.- -«1М tOMWKC
макс
л. arctg(l/;fe tg MctKc) .
uj::,,
мын
П Т,. е
-«т
1587465
(..)/(1
11
)
,
MWH
,«K.
sig 4j,«KC(io) sign .c °
H-(x-1)sin20,,
Время, которое необходимо для затухания амплитуды колебаний в упругой сист.еме в е раз, оценивается соотношением t 2Т/1п т , В дальнейшем удобно пользоваться безразмерной величиной € ). Следовательно, задача поиска оптимального значения параметра 9 ,c может быть сведена к следующей постановке:
причем
10
signVMc,Kt si8nCq;v.c,KcSii pi -q qKcCOSl pt/W J
Условия (9) и (10) идентичны соответствующим условиям, используемым в известном устройстве, при осуществлении в последних замены: .
, I
Vi-v:
ш
макс W
Ч,
(e,pt,«, a)minf(0
8,
,е{о4).
мак
,5е,а)
«а« Пусть 9t ,()(c,
t(0opb эе,,
2То/1пз „
0)).
с /«««
t
Те
1
W
ДЛ«КС
,
макс
+ arctgV. tge)/T,j,
In
0--) -In Н(х.-1),„
i
характеристики t-оптимального процесса в упругой системе без диссипации, a0(jp-to- угол, характеризующий оптимальную логику управления жесткостью в этом случае.
Учитывая, что (, X., а) О («KtJ « ) О для любого (локс (О, if/2}, а также то, что T,(«) Tw,,,, T,uJ,,,.), 3 (,(«) Jf, 5 j(, имеют из (7):
- op.
,Э1,а)
.
,,оГ
(8)
Условие (8) наглядно показывает, что при заданных коэффициенте демпфирования а и диапазоне изменения жесткостных свойств упругого элемента, искомый угол б opt ©opt (зе.) может быть получен при соответствующем переходе к новому аргументу
-v, /4 (и)н) .к
(9)
Однако, следует иметь в виду, что полученный результат должен быть использован в законе (2), записанном
для новых координатных базисов (q „
II W- NC4 л«.с V;«,,, „,, в виде:
15
20
макс мин Э о X. ,
ш
ми к
25
30
ЛАЧКС ММКС I
Следовательно, чтобы учесть влия- (7) ние демпфирования упругой системы на оптимальную логику управления жесткостью упругого элемента, достаточно в известном устройстве осуществить переход от фазовых координат (QJ q/Co) к новым фазовым координатам (q- , q /W) согласно формулам (4). Именно этим обусловлено введение в известное устройство блока преобразования фазовых координат. Кроме того, необходимо на третий и чет- вертьй входы блока 4 оценки частоты подавать со к со соответственно.
После воздействия внешнего возмущающего момента упругий элемент начинает колебаться с. максимальной частотой , поскольку в состоянии покоя, жесткость упругого элемента максимальна (из условия снижения амплитуды колебаний, возникающих от действия внешнего возмущающего импульса) ,
Датчик 2 отклонения начинает выдавать текущее значение величины обобщенной координаты отклонения упругого элемента, которое поступает на вход дифференцирующего блока 3 и первый :Вход блока 9 преобразования координат. Текущее значение скорости обобщенной координаты отклонения упругого, элемента вьщается с выхода диффер енцирующего блока 3 на вход блока 9 преобразования координат. Сигнал с первого и второго входов блока 9 преобразования координат, поступает на информационные входы ключей 10 и 11 соответственно, которые открываются импульсами с тене- ратора 8 тактовых импульсов, благодаря чему осуществляется общая син- хронизация процессов в блоке 9 преобразования координат с процессами в остальной части системы. В суммато35
40
45
50
55
MWH
signCf aKC
,«K.
sig 4j,«KC(io) sign .c °
причем
signVMc,Kt si8nCq;v.c,KcSii pi -q qKcCOSl pt/W J
Условия (9) и (10) идентичны соответствующим условиям, используемым в известном устройстве, при осуществлении в последних замены: .
, I
Vi-v:
ш
макс W
Ч,
5
макс мин Э о X. ,
ш
ми к
ЛАЧКС ММКС I
Следовательно, чтобы учесть влия- ние демпфирования упругой системы на оптимальную логику управления жесткостью упругого элемента, достаточно в известном устройстве осуществить переход от фазовых координат (QJ q/Co) к новым фазовым координатам (q- , q /W) согласно формулам (4). Именно этим обусловлено введение в известное устройство блока преобразования фазовых координат. Кроме того, необходимо на третий и чет- вертьй входы блока 4 оценки частоты подавать со к со соответственно.
ре 12 формируется сигнал q - q,
причем информация о коэффициенте передачи на третьем входе сумматора 12 поступает на его первый вход с четвертого входа блока 9 преобразования координат. На выходе генератора 15 экспоненциального напряжения формируется сигнал , где t - период следования импульсов с генератора 8 тактовых импульсов.
На выходе блоков 13 и 14 умножения формируются соответственно
, . а q , -с.г/1 q е и (;q - -) е , что соот
ветствует дискретному преобразованию на основе формул .(4), Полученная информация выдается на первом и втором выходах блока 9 преобразова ния координат, которым в известном соответствуют выходы с датчика 2 отклонения и дифференцирующего блока 3 , В остальном функционирование пред лагаемого устройства полностью анало гично известному. Следует отметить, что для повышения чувствительности системы управлений желательно добиваться, чтобы время преобразования сигналов в блоке 9 .преобразова- ния координат не превосходило длительности импульсов, следующих с генератора 8, Формула изобретения
1, Устройство для успокоения колебаний упругого элемента переменной жесткости, содержащее объект управления с присоединенным упругим элементом переменной жесткости ,к выходу которого подключен датчик откло нения упругого элемента, а к входу - регулятор жесткости упругого элемента, выход датчика отклонения упругого элемента соединен с входом диф- ференцир.ующего блока, генератор так- товых импульсов подключен к первому входу блока оценки частоты, второй вход которого соединен с выходом блока управления жесткостью упругого элемента и входом регулятора жесткое- ти упругого элемента, третий и четвертый входы блока оценки частоты подключены к первому и второму источникам постоянного напряжения,первый и второй выходы блока оценки час-
10
20
25
0
587465 О
тоты соединены соответственно с первым и вторым входами блока коррекции частоты, первый и второй выходы которого соединены с первым и вторым, вхосж.
дами блока управления жесткостью уп- ругого элемента, отличаю- щ е е с я тем, что, с целью повышения быстродействия устройства, оно дополнительно снабжено третьим источником постоянного напряжения и блоком преобразования координат, пер- вьш, второй, третий и четвертый вхо- цы.которого соединены соответственно с выходами датчика отклонения упругого элемента, дифференцирующего блока, генератора тактовых импульсов и третьего источника постоянного напряжения, первый выход блока преоб- разования координат связан с третьим входом блока управления жесткостью упругого элемента и пятым входом блока оценки частоты, а второй выход - с четвертым входом блока управления жесткостью упругого элемента и шестым входом блока оценки частоты, 2, Устройство по П.1, о т л и 15
чающееся тем, что блок преобразования координат, содержит генератор экспоненциального напряжения, первый и второй ключи, сумматор, первый и второй блоки умножения, причем первый и второй входы блока преобразования координат соединены соответственно с информацио}шъми входами первого и второго ключей, с управляющими входами которых связан вход блока преобразования координат, четвертый вход блока преобразования координат соединен с входом генератора экспоненциального напряжения и первым входом сумматора, второй и третий входы которого связаны соответственно с выходами первого и второго ключей, причем выход первого ключа связан с первым входом первого блока умножения, с вторым входом которого соединены выход генератора ,экспоненциального напряжения и первый вход второго блока умножения, второй вход которого подключен к выходу сумматора, выходы первого и второго блоков умножения соединены соответственно с первым и вторым выходами блока преобразования координат.
18
Ю
Фиг.2
а
тон- Ч. так
VC
majf
Фи9.3
nin Q ::- /nt
/nt/,
«m.
| Устройство для успокоения колебаний упругого элемента переменной жесткости | 1987 |
|
SU1500990A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
