УРОВЕНЬ ТЕХНИКИ
В течение последних лет были значительно усовершенствованы сенсорные процессы для определения приближения к магнитным конструкциям, полям или магнитным аномалиям. При разведке природных ресурсов измерения датчиков могут использоваться для перехвата различных устройств или компонентов, определения производительности месторождения, составления прогнозов и выполнения действий, связанных с разведкой. В некоторых случаях при выполнении измерений могут потребоваться крупногабаритные сенсорные устройства, которые могут быть сложными в управлении, неточными, дорогостоящими и сложными.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Иллюстративные варианты реализации данного изобретения подробно описаны ниже со ссылками на прилагаемые графические материалы, которые включены в настоящий документ посредством ссылки, причем:
На Фиг. 1 проиллюстрировано схематическое представление оборудования для каротажа во время бурения (КВБ) в соответствии с описанными вариантами реализации изобретения;
На Фиг. 2 проиллюстрировано схематическое представление каротажного оборудования в соответствии с описанными вариантами реализации изобретения;
На Фиг. 3 проиллюстрировано схематическое представление системы датчиков на бурильной колонне с вращающейся системой управления направлением бурения в соответствии с описанными вариантами реализации изобретения;
На Фиг. 4 проиллюстрировано схематическое представление второй системы датчиков на бурильной колонне с вращающейся системой управления направлением бурения в соответствии с описанными вариантами реализации изобретения;
На Фиг. 5 проиллюстрировано графическое представление поперечного сечения магнитного поля при отсутствии намагничиваемого объекта вблизи бурового инструмента в соответствии с описанными вариантами реализации изобретения;
На Фиг. 6А проиллюстрировано схематическое, графическое представление поперечного сечения магнитного поля бурового инструмента при наличии намагничиваемого объекта в соответствии с описанными вариантами реализации изобретения;
На Фиг. 6В проиллюстрировано схематическое, графическое представление системы датчиков в соответствии с описанными вариантами реализации изобретения;
На Фиг. 6С проиллюстрировано графическое представление выталкивающего поля, создаваемого магнитами в соответствии с описанными вариантами реализации изобретения;
На Фиг. 6D проиллюстрировано графическое представление выталкивающего поля, создаваемого системой датчиков в соответствии с описанными вариантами реализации изобретения;
На Фиг. 7А проиллюстрировано схематическое, графическое представление инструмента для направленного бурения, используемого для пересечения существующей скважины в соответствии с описанными вариантами реализации изобретения;
На Фиг. 7В-7С проиллюстрированы виды поперечного сечения выравнивания при пересечении скважины в соответствии с описанными вариантами реализации изобретения;
На Фиг. 8А-8С проиллюстрированы схематические виды поперечного сечения системы датчиков магнитного сопротивления в соответствии с описанными вариантами реализации изобретения;
На Фиг. 9 проиллюстрирована эквивалентная схема системы датчиков в соответствии с описанными вариантами реализации изобретения;
На Фиг. 10 проиллюстрировано схематическое представление системы скважинных датчиков в обсадной колонне в соответствии с описанными вариантами реализации изобретения;
На Фиг. 11 и 12 проиллюстрировано схематическое представление инструмента для направленного бурения, используемого в разветвленной скважине в соответствии с описанными вариантами реализации изобретения; и
На Фиг. 13 проиллюстрирована структурная схема буровой системы в соответствии с описанными вариантами реализации изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
В иллюстративных вариантах реализации изобретения представлена система датчиков, способ, а также буровой инструмент и устройство для измерения или обнаружения намагничиваемой конструкции в подземной среде. Иллюстративные варианты реализации изобретения могут использоваться для пересечения скважины, например, в случае бурения разгрузочной скважины для пересечения со скважиной с неуправляемым выбросом, с целью блокировки или ремонта скважины с неуправляемым выбросом. Иллюстративные варианты реализации изобретения могут также использоваться для предотвращения пересечения скважин, находящихся в непосредственной близости друг от друга, например, в условиях буровой морской платформы, когда скважины могут располагаться на близком расстоянии друг от друга. В одном варианте реализации изобретения могут измеряться изменения магнитного сопротивления относительно азимутального направления вокруг реализованных систем или инструментов. Иллюстративные варианты реализации изобретения могут использоваться для измерения расстояния внутри или за пределами скважины. Например, система датчиков может быть выполнена с возможностью определения расстояния между инструментом и стенками обсадной колонны, определения местоположения ответвления скважины, а также измерения толщины стенки обсадной колонны. В данной заявке при использовании предлога "или" не подразумевается взаимоисключение.
В одном варианте реализации изобретения в качестве датчика иллюстративной системы может использоваться магнитометр. Тем не менее, в качестве датчиков могут использоваться один или более магнитометров, гауссметров, магнитометров с насыщенным сердечником, градиентометров, датчиков на эффекте Холла, катушек с обмотками, или других датчиков, выполненных с возможностью обнаружения или измерения напряженности или интенсивности магнитного поля (или изменений напряженности или интенсивности магнитного поля). Магнитометр выполнен с возможностью измерения напряженности магнитного поля, в то время как магнитный градиентометр выполнен с возможностью измерения скорости изменения магнитного поля (например, dB/dr) в виде пространственной производной. Например, градиентометры выполнены с возможностью измерения приращения напряженности магнитного поля в различных радиальных положениях (например, dB=В2-B1, dr=r2-r1), например, при заданных радиальных расстояниях. В одном варианте реализации изобретения величины, измеренные градиентометрами, могут являться приращением напряженности магнитного поля, измеренным с помощью двух магнитометров, деленным на величину зазора между ними. Магнитометры могут располагаться таким образом, чтобы их чувствительные оси и ориентации находились в одном направлении. В других вариантах реализации изобретения для получения более точных результатов и обеспечения резервирования в случае отказа может использоваться массив датчиков. В одном варианте реализации изобретения магнитометр выполнен с возможностью измерения напряженности магнитного поля, характерной для выбранного радиального направления.
Как описано в данной заявке, в иллюстративных вариантах реализации изобретения могут использоваться один или более датчиков магнитного сопротивления, включая магнитометры и градиентометры. Системы датчиков магнитного сопротивления могут содержать один или более постоянных магнитов. Например, вышеуказанные датчики могут включать катушки или обмотки для обнаружения изменения магнитного поля, создаваемого постоянным магнитом. Для обнаружения изменений магнитного потока, для определения скорости, направления и положения целевых устройств датчики могут вращаться. Целевые устройства могут быть сплавом на основе ферромагнитного материала или магнитными целями. Зондирование выполняется без контакта с целью (до тех пор, пока это необходимо).
Иллюстративные варианты реализации изобретения могут иметь многочисленные полезные улучшения по сравнению с существующими системами. В одном варианте реализации изобретения для системы датчиков протекание тока в целевой скважине или в ее компонентах может быть необязательным. Это может быть особенно важно для областей с большим количеством соляных пластов. Из-за соляных пластов активное возбуждение электрического тока становится достаточно затруднительным. В результате, в пластах с высоким сопротивлением система датчиков может направлять буровой инструмент к нужному пересечению. Поскольку передатчик и приемник для измерения расстояния располагаются в одном месте на компоновке низа бурильной колонны, может потребоваться меньше деталей. Различные варианты реализации изобретения содержат ряд маломощных применений. За счет использования выталкивающих магнитов и магнитометров может быть обеспечена радиальная азимутальная чувствительность не хуже, чем у более дорогих и сложных приборов. В других вариантах реализации изобретения система датчиков может использоваться для измерения износа обсадной колонны, являться прибором для поиска окон в многоствольной скважине, для определения местоположения муфты обсадной колонны и предоставлять профиль фрезерования.
Иллюстративные варианты реализации изобретения обеспечивают высокую точность измерения направления к и расстояния до ближайших намагничиваемых конструкций с целью обхода, прохождения в непосредственной близости или пересечения целевых скважин, приборов, компонентов, геологических пластов и т.д. Иллюстративные варианты реализации изобретения могут использоваться для направления разгрузочной для пересечения с целевой скважиной в форме активного возбуждения электрического тока. В одном варианте реализации изобретения система датчиков может использоваться со стандартным или направляемым буровым долотом. В других вариантах реализации изобретения система датчиков может использоваться в составе каротажного прибора.
Измерение расстояний с помощью системы датчиков может выполняться множеством способов. В одном варианте реализации изобретения может использоваться эталонная модель для определения значения интенсивности и направления поля намагничивания, создаваемого заданной конструкцией в зависимости от формы конструкции и магнитной проницаемости материала, из которого изготовлена конструкция. Результаты измерений могут сопоставляться с ожидаемыми результатами для определения приближения, ориентации или конфигурации обнаруживаемой конструкции. Система может также определять расстояние путем измерения градиента магнитного поля намагниченного объекта, который является наложением самого себя на постоянное магнитное поле. Система датчиков может также измерять изменение напряженности магнитного поля по мере приближения к или отклонения скважинного прибора от намагничиваемого объекта. Система датчиков также может определять расстояние путем измерения напряженности магнитного поля над нейтральной средой. В другом варианте реализации изобретения система датчиков может накладывать небольшое поле, возбужденное переменным током, на верхнюю часть поля магнитного сопротивления (желательно того же выталкивающего вида) путем использования противоположных обмоток на каждом магните. Данный вид активной локации может также использоваться в сочетании с постоянным магнитным полем от постоянного магнита. В иллюстративных вариантах реализации изобретения может также использоваться любое количество конструкций или устройств для усиления, направления, управления или иного влияния на магнитное поле.
На Фиг. 1 проиллюстрирована типовая среда для проведения каротажа во время бурения (KBБ) 100. КВБ может также упоминаться как измерение во время бурения (ИВБ). Буровая платформа 5 содержит буровую вышку 10, поддерживающую талевый блок 15. Оператор буровой установки пробуривает нефтяную или газовую скважину для добычи или разведки месторождения с помощью колонны бурильных труб 20. На талевом блоке 15 подвешен верхний привод 25, вращающий колонну бурильных труб 20, причем колонна бурильных труб 20 опускается через устье скважины 30. На нижнем конце колонны бурильных труб 20 устанавливается буровое долото 35. Буровое долото 35 вращается и бурение выполняется путем вращения колонны бурильных труб 20 с помощью забойного двигателя, находящегося возле бурового долота 35, или верхнего привода 25, или ведущей трубы и роторного стола (не показан) или с помощью этих двух способов.
В одном варианте реализации изобретения циркуляционное оборудование 40 перекачивает буровой раствор или другие жидкости через трубопровод 80 к буровой вышке 10 и подает его на буровую вышку 10 через буровой стояк 81, затем через гибкий шланг 82 на вертлюг 83 на верхнем приводе, что позволяет перекачивать через верхний привод 25 большие объемы жидкости под высоким давлением, затем через колонну бурильных труб 20 и верхний привод 25 вниз по колонне бурильных труб 20 так, чтобы жидкость подавалась в буровое долото 35 через сопла или форсунки. Буровой раствор возвращается обратно вверх через ствол скважины по кольцевому зазору, образованному между наружной частью колонны бурильных труб 20 и стенкой скважины 50, через противовыбросовый превентор, через обратный трубопровод 45, затем в яму для бурового раствора 55, резервуар или закрытую емкость на поверхности. На поверхности буровой раствор может очищаться, а затем повторно подаваться на буровую вышку с помощью циркуляционного оборудования 40. Буровой раствор может использоваться для выноса бурового шлама из забоя скважины на поверхность и выравнивания гидростатического давления в горных породах в среде для проведения каротажа во время бурения 100.
Компоновка низа бурильной колонны 60 (т.е., нижняя часть бурильной колонны 20) может содержать толстостенные трубы, называемые утяжеленными бурильными трубами, с помощью которых увеличивается вес, устойчивость и жесткость, благодаря чему облегчается процесс бурения. Толстые стенки этих утяжеленных бурильных труб позволяют их использовать в качестве корпуса приборов, инструментов и датчиков для каротажа в процессе бурения. Например, компоновка низа бурильной колонны 60 на Фиг. 1 может содержать систему датчиков 65 (также называемую датчиком магнитного сопротивления), а также модуль управления и связи 70.
Система датчиков 65 может содержать ряд постоянных магнитов и катушек, выполненных с возможностью обнаружения изменения магнитного поля в случае, когда система датчиков 65 располагается вблизи ферромагнетиков, парамагнетиков, магнитных земных пластов (например, пирита, парамагнитного сланца и т.д.), или других компонентов, подвергающихся воздействию магнитного поля. Система датчиков 65 может размещаться в скважинном приборе или переводнике бурильной колонны. В одном варианте реализации системы система датчиков 65 не содержит магнитных материалов, чтобы исключить влияния на показания, снятые с помощью системы датчиков 65. Типовые материалы для системы датчиков 65 могут включать различные виды аустенитных нержавеющих сталей.
В одном варианте реализации изобретения система датчиков 65 является датчиком магнитного сопротивления, который располагается максимально близко к буровому долоту 35 или встраивается в буровое долото 35, включая такие местоположения как режущая часть бурового долота из поликристаллического алмазного композита (ПАК) или элемент резца. В других вариантах реализации изобретения система датчиков 65 может являться частью колонны бурильных труб 20, которая находится прямо над буровым долотом 35. На Фиг. 4-7 проиллюстрированы различные конфигурации колонны бурильных труб 20 и системы датчиков 65. Система датчиков 65 может применяться для проведения измерений в пластах высокого сопротивления, таких как солевые пласты, для которых существующие активные средства возбуждения электрического тока не являются достаточно эффективными.
Кроме того, система датчиков 65 или компоновка низа бурильной колонны 60 могут содержать, без ограничений, детектор естественного гамма-излучения, зонд каротажа сопротивлений, зонд ядерного магнитного резонанса, зонд нейтронного каротажа пористости, или другие приборы для идентификации пластов при разведке месторождения и датчики. Другие инструменты и датчики также могут быть включены в состав компоновки низа бурильной колонны 60 или системы датчиков 65, включая, но, не ограничиваясь этим, датчики положения, датчики ориентации, акселерометры, компасы, датчики давления, датчики температуры, датчики вибрации и т.д.
Модуль связи и управления 70 (модуль телеметрии) собирает данные от различных датчиков компоновки низа бурильной колонны 60, относящиеся к свойствам пласта, или различным параметрам режима бурения, компоновкам инструмента и конфигурации, а также показания от системы датчиков 65, при этом данные сохраняются во внутренней памяти. Кроме того, некоторые или все данные могут передаваться на поверхность посредством проводной связи, беспроводной связи, магнитной связи, сейсмической связи, гидроимпульсной телеметрии и т.д.
Например, модуль связи и управления 70 может передавать информацию на поверхность. Сигналы передачи данных могут приниматься приемником 84, расположенным на поверхности, преобразовываться в соответствующий формат, и обрабатываться в виде данных одним или более вычислительными или коммуникационными устройствами, например, компьютером 75. Как описывается в данной заявке, вычислительные устройства, например, компьютеры, могут содержать один или более центральных процессоров (ЦП) или аппаратную или программную управляющую логику, соединенную с возможностью обмена данными с запоминающим устройством, таким как жесткий диск, оперативная память, магнитная оперативная память (МОЗУ) или другими видами энергонезависимой памяти, которая содержит набор выполняемых процессором команд или программное обеспечение.
В некоторых вариантах реализации изобретения, набор программ может храниться на портативных носителях информации 80, таких как флэш-накопители, компакт-диски, цифровые видеорегистраторы и т.д., а затем храниться в компьютере 75 или запускаться с портативных носителей информации. Компьютер 75 также может принимать данные, вводимые пользователем посредством устройства ввода 91, такого как, клавиатура, мышь, курсор, а также кнопки мыши, микрофон или другие устройства для обработки и декодирования принятых сигналов. Результирующие сенсорные и телеметрические данные могут быть дополнительно проанализированы и обработаны с помощью компьютера 75 для формирования отображения полезной информации на компьютерном мониторе 90 или устройстве отображения или вывода какого-нибудь другого вида, например, мобильного устройства, такого как смартфон или планшетный ПК. Например, буровой мастер может использовать систему, которая является частью среды для проведения каротажа во время бурения 100, для получения и отображения измеренного расстояния, пересечения или информации о магнитном поле для стенки ствола скважины 50 и скважинных компонентов, конструкций или пластов.
На Фиг. 2 проиллюстрировано схематическое представление среды для проведения каротажа 200 в соответствии с описанными вариантами реализации изобретения. Среда проведения каротажа 200 может содержать любое количество инструментов, устройств, буровых площадок, систем и оборудования, которые могут использоваться для реализации сенсорных инструментов, систем и способов, описанных в данной заявке. Среда для проведения каротажа 200 может также содержать месторождение 201.
Как уже отмечалось ранее, месторождение 201 является определенной областью, участком с обозначенными границами, или трехмерным пространством, которое может содержать природные ресурсы, такие как нефть, природный газ или другие углеводороды. Месторождение 201 может содержать любое количество пластов, поверхностных состояний, сред, структур или композиций. В иллюстративных вариантах реализации изобретения могут использоваться датчики для определения свойств и проведения измерений в месторождении 201 и скважине 203, проникающей в месторождение. Например, изменение магнитного потока может использоваться для измерения параметров (например, расстояния, направления, толщины стенки обсадной колонны, магнитной проницаемости стенки обсадной колонны и т.д.), свойств, структур или пластов, отложений, скважинных инструментов или компонентов, или других свойств месторождения 201 и скважины 203. Аналогичным образом могут использоваться проницаемость, магнитное сопротивление или другие связанные параметры. Например, расстояние до стенок ствола скважины может определяться за счет использования изменений магнитного потока. Обработка или вычисления, в которых используется плотность магнитного потока, могут выполняться в скважине, на буровой площадке, вне буровой площадки, на мобильной буровой установке, в главных офисах, с использованием стационарных вычислительных устройств, с использованием беспроводных устройств, либо по сети передачи данных с использованием удаленных компьютеров в режиме реального времени или более поздней обработки.
Данные и информация, полученные в результате исследования скважины 203 могут использоваться для выполнения измерений, анализа, а также действий по разведке или добыче из месторождения 201. Скважина 203 может быть пробурена и может быть выполнена совместно с месторождением 201 для извлечения флюидов или газов из пласта. Размер, форма, направление и глубина скважины 203 может меняться в зависимости от условий и ожидаемых доступных природных ресурсов. Скважина 203 может содержать любое количество вспомогательных структур или материалов, различных путей, поверхностного оборудования, и так далее.
В одном варианте реализации изобретения процессы, описанные в данной заявке, могут выполняться с использованием специализированных сенсорных инструментов, включая датчики магнитного сопротивления, индукционные датчики приближения, датчики сопротивления, датчики магнитного поля, акустические датчики приближения, датчики расположения (например, выполненные с возможностью измерения расстояния до или направления на искусственные подземные конструкции), датчики ориентации (например, гироскопы, компасы, акселерометры и т.д.), логические схемы, межблочные кабели, источники питания, и другие аналогичные электрические компоненты. Используемые в инструментах логические схемы могут содержать процессоры, контроллеры, накопители, программируемые пользователем вентильные матрицы (ПЛИС), аккумуляторы, провода, шины, контакты, разъемы, усилители, специализированные интегральные микросхемы, компьютерные команды, коды, программы, или приложения, или любую комбинацию программного, аппаратного и микропрограммного обеспечения.
В одном варианте реализации изобретения среда для проведения каротажа 200 может содержать сеть 202, беспроводную сеть 204, оборудование 206, компьютер 208, систему управления 210, серверы 212 и 214, базу данных 216, планшетный компьютер 218, беспроводное устройство 220, переносной компьютер 222 и мобильную вычислительную систему 224. Мобильной вычислительной системой 224 может быть любая компьютерная система, в которой один или более компонентов системы являются портативными, т.е. не находятся стационарно в одном географическом местоположении, и могут содержать одну или более баз данных, планшетные компьютеры, беспроводные устройства или компьютеры. Мобильные вычислительные системы 224 могут прямо или косвенно обмениваться данными со скважинным оборудованием 226 и/или инструментом 228 с использованием вычислительной или коммуникационной сети. В одном варианте реализации изобретения мобильная вычислительная система 224 обменивается данными со скважинным оборудованием 226 и/или инструментом 228 с помощью сети 202. Сеть 202 может быть вычислительной или коммуникационной сетью любого типа, включая одну или более из следующих сетей: глобальная сеть, локальная сеть, одна или более частных сетей, Интернет или сети общего пользования, телефонная сеть (например, коммутируемая телефонная сеть общего пользования), кабельная сеть, спутниковая сеть, одна или более сотовых сетей, облачных сетей, виртуальных сетей, и других беспроводных и сетей передачи данных.
Беспроводная сеть 204 является одной из типовых беспроводных сетей для региональной или местной связи (например, WiFi, GMS, 4G, LTE, PCS, Bluetooth, Zigbee, WiMAX, GPRS и т.д.). Сеть 202 и беспроводная сеть 204 могут содержать любое количество сетевых узлов, устройств, систем, оборудования и компонентов (не показаны), таких как маршрутизаторы, серверы, точки доступа в сеть/шлюзы, платы, линии, провода, коммутаторы, DNS-серверы, прокси-серверы, веб-серверы и другие сетевые узлы и устройства для содействия маршрутизации и вычислению данных/сообщений, как описано в данной заявке.
В другом варианте реализации изобретения встроенные или внешние инструменты или компоненты, которые обмениваются данными с мобильной вычислительной системой 224, могут быть выполнены с возможностью проникания в толщу пород через ствол скважины 203 для возбуждения, активизации и измерения параметров пластов или близлежащих искусственных конструкций. Один или более датчиков или каротажных приборов (например, зонды, измерительные приборы, установленные на бурильной колонне, графические построители на основе ядерно-магнитного резонанса и т.д.) могут быть встроены или подключены к скважинному оборудованию 226 и инструменту 228, которые обмениваются данными с мобильной вычислительной системой 224 для генерации сигналов, выполнения измерений, каротажа, сбора данных, хранения данных, обработки и отображения информации.
Например, мобильная вычислительная система 224 может определять любое количество статических и динамических свойств месторождения 201. Статические и динамические свойства могут включать измерения изменений давления, расстояний в и диаметров ствола скважины, направлений, глубины, температуры, состава (например, уровни, значения измерений и статистика углеводородного состава), скорости потока флюида, состава флюида, плотности, пористости, положения и смещения, глубины и так далее. Изменения или вариации свойств пластов в месторождении 201 или стволе скважины 203 воздействуют на магнитный поток инструмента 228 и могут использоваться для выполнения любого числа измерений, относящихся к естественным пластам, структурам, или искусственным компонентам в месторождении 201.
Например, бурильная колонна (см. Фиг. 1) в процессе бурения может неоднократно извлекаться из ствола скважины 203. После извлечения бурильной колонны могут проводиться каротажные операции с помощью инструмента 228, который может быть проводным или беспроводным. Например, инструмент 228 может быть измерительным преобразователем, подвешенным на кабеле, содержащем проводники для электропитания инструмента и телеметрии от инструмента к поверхности. Инструмент 228 может настраиваться заранее для тестирования или настраиваться в режиме реального времени в условиях среды для проведения каротажа. Инструмент 228 может выполняться с возможностью работы при вращении или без вращения.
В качестве альтернативного варианта инструмент 228 может быть представлен любым количеством инструментов для каротажа во время бурения, измерения во время бурения, сейсмических измерений во время бурения или другого скважинного или пластового инструмента. В одном варианте реализации изобретения инструмент 228 может быть выполнен с возможностью вращения одного или более датчиков для повышения точности измерений, выполняемых с помощью инструмента 228. Инструмент 228 может быть выполнен с возможностью хранения или передачи сигналов и данных, полученных при измерении изменений магнитного потока для определения близости к компонентам или свойств в каждой секции месторождения 201 или ствола скважины 203. Инструмент 228 может быть автономным или получать электропитание или подключаться к одной или более стационарным или мобильным станциям, системам, устройствам, оборудованию или транспортным средствам на поверхности.
В одном варианте реализации изобретения инструмент 228 или другие части мобильной вычислительной системы 224 могут передавать одно или более магнитных полей от инструмента 228. Магнитное поле, используемое инструментом 228 для проведения измерений, может создаваться с помощью инструмента 228 или любого количества устройств, находящихся в непосредственной близости к инструменту 228. Один или более компьютеров 208, планшетных компьютеров 218, беспроводных устройств 220, портативных компьютеров 222 или мобильных вычислительных систем 224 могут выполнять программу для настройки инструмента 228, а также получать и использовать измеренные значения, полученные в ходе процесса, описанного в данной заявке. Например, в одном варианте реализации изобретения беспроводное устройство 220 может быть выполнено с возможностью увеличения или уменьшения амплитуды, выталкивающего эффекта, чувствительности, или других параметров, используемых инструментом 228. Инструмент 228 может также настраиваться с помощью программ или алгоритмов для автоконфигурации на основе используемых сред, параметров, условий, и т.д.
Беспроводное устройство 220 может также использоваться для фильтрации особых типов полей, поворота инструмента (в любом из трех измерений), и т.д.
В другом варианте реализации изобретения вычисления и анализ данных, считанных с помощью инструмента 228, могут осуществляться с помощью системы обработки информации. Система обработки информации может содержать оперативное запоминающее устройство (ОЗУ), один или более вычислительных ресурсов, таких как центральный процессор (ЦП), аппаратную или программную управляющую логику, ПЗУ, и/или другие виды энергонезависимой памяти. Дополнительные компоненты системы обработки информации могут содержать одно или более дисковых запоминающих устройств, один или более сетевых портов для связи с внешними устройствами, а также устройства ввода и вывода (ввода/вывода), такие как клавиатура, мышь и монитор. Система обработки информации также может содержать одну или более шин для передачи данных между различными аппаратными компонентами. В контексте данной заявки машиночитаемый носитель может включать любое средство или совокупность средств, выполненных с возможностью хранения данных и/или команд в течение определенного периода времени. Машиночитаемые носители могут включать, например, без ограничения, носители информации, такие как запоминающие устройства прямого доступа (например, жесткий диск или дисковод гибких дисков), запоминающие устройства последовательного доступа (например, накопитель на магнитной ленте), компакт-диски, CD-ROM, DVD, ОЗУ, ПЗУ, электрически стираемое программируемое ПЗУ (ЭСППЗУ), и/или флэш-память; а также среды передачи данных, такие как металлические провода, оптические волокна, электромагнитные волны СВЧ диапазона, радиоволны, а также другие электромагнитные и/или оптические среды; и/или любую комбинацию вышеперечисленного.
В одном варианте реализации изобретения, представленном на Фиг. 2, вычисления и анализ данных, считанных с помощью инструмента 228, могут выполняться системой обработки информации, содержащей систему управления 210, серверы 212 и 214 и другие сетевые устройства.
Например, для выполнения вычислений на сервере 212 пользователь может отправить информацию и параметры с помощью беспроводного устройства 220, персонального компьютера 208, планшетного компьютера 218, портативного компьютера 222 или мобильный вычислительной системы 224, причем результаты будут храниться в базе данных 216 для последующего доступа. В базе данных 216 могут храниться глубины и расположения компонентов, данные датчиков ориентации, толщины стенок обсадной колонны, статические свойства, динамические свойства, параметры, конфигурации, настройки и т.д. База данных 216 выполнена с возможностью доступа для получения и обновления данных любому числу пользователей и устройств в среде для проведения каротажа 200.
В одном варианте реализации изобретения серверы 212 и 214 выполнены с возможностью выполнения приложения, доступного для любого из устройств в среде для проведения каротажа 200 посредством сети 202 и беспроводной сети 204. Например, приложение может отображать пользовательский интерфейс для ввода параметров, свойств и другой информации для настройки инструмента 228 или просмотра результатов измерения инструмента 228. В одном варианте реализации изобретения сервер 214 является веб-сервером, на котором размещается приложение для обработки скважинных измерений, доступное посредством одного или более браузеров с помощью любого персонального компьютера 208, планшетного компьютера 218, беспроводного устройства 220, портативного компьютера 222 и мобильной вычислительной системы 224.
На Фиг. 3 проиллюстрирована часть бурильной колонны 300 с системой датчиков 302 в соответствии с описанными вариантами реализации изобретения. В одном варианте реализации изобретения система датчиков 302 может быть выполнена как единое целое с наддолотным переводником бурильной колонны. В другом варианте реализации изобретения бурильная колонна 300 может содержать систему датчиков 303, расположенную над дополнительным забойным двигателем 304, соединенным с инструментом для наклонно-направленного бурения роторным способом 310 посредством приводного вала 307, и буровое долото 308. В одном варианте реализации изобретения в инструменте для наклонно-направленного бурения роторным способом 310 может использоваться наклон или положение зонда для управления направлением бурения на буровом долоте, причем буровое долото 308 наклоняется в нужную сторону для бурения, при этом для предотвращения вращения корпуса 306 вместе с бурильной колонной 300 корпус 306 фиксируется неподвижно в породе с помощью захватных приспособлений 311 (без блокировки). Приводной вал 307 может эластично сгибаться и образовывать изогнутый профиль относительно продольной оси корпуса 306 между одной или более точками опоры, позволяя отклонить буровое долото 308 во время вращения приводного вала 307 с помощью забойного двигателя 304 или бурильной колонны 300 или и того и другого.
В другом варианте реализации изобретения система датчиков 312 может быть выполнена как единое целое с инструментом для наклонно-направленного бурения роторным способом 310. Например, система датчиков 312 может располагаться в невращающемся корпусе 306 инструмента для наклонно-направленного бурения роторным способом 310. Поскольку система датчиков 312 неподвижна в невращающемся корпусе 306, вращение бурового долота 308 может привести к периодическим колебаниям магнитного поля, вызванным вращением бурового долота 308. Независимо от местоположения системы датчиков 302 (как вариант, системы датчиков 303, 312) система датчиков 302 может контролировать вращение бурового долота 308 и компенсировать периодические колебания магнитного поля, возникающие в результате вращения бурового долота 308. В одном варианте реализации изобретения система датчиков 302 выполнена с возможностью определения числа оборотов в минуту приводного вала 307, соединенного с буровым долотом 308, для исключения влияния на магнитное поле флуктуации вращения. Для настройки системы датчиков 302 внутри скважины может выполняться компенсация вращения путем вычитания данных влияний из результатов измерений системы датчиков 302 или с помощью электронной фильтрации сигналов, принятых магнитометрами и связанных с числом лопастей и скоростью вращения бурового долота с неподвижными резцами 308, которое вызывает отклонение магнитного сопротивления и иным образом оказывает влияние на магнитное поле. Компенсация может также выполняться или применяться к любым отклонениям магнитного поля, обнаруживаемым датчиком из-за разницы между скоростью вращения датчика и других элементов бурильной колонны.
Это может также применяться в вариантах реализации изобретения, включающих шарошечные буровые долота, в которых колебания могут возникать при вращении шарошек бурового долота.
В одном варианте реализации изобретения компенсация может включать оцифровку полученного сигнала, выполнение быстрого преобразования Фурье (БПФ) для дискретных данных, определение энергии на частотах, относящихся к скорости вращения вала, вычитание этой части сигнала из спектра БПФ, а затем повторное инвертирование частотной области БПФ во временную область сигнала напряженности в зависимости от времени или азимутального положения, при этом в обработанном сигнале остается сигнал, связанный с обнаружением намагниченности близлежащей искусственной конструкции. Также могут использоваться многие другие известные специалистам в данной области техники алгоритмы цифровой фильтрации.
В соответствии с описанными вариантами реализации изобретения на Фиг. 4 проиллюстрирована система датчиков 402 на буровой системе на основе мотора 403. В некоторых вариантах реализации изобретения буровая система на основе мотора 403 может содержать винтовой забойный двигатель Муано (ВЗД), турбинный двигатель (например, турбобур), лопастной гидромотор или электрический двигатель, соединенный с приводным валом 405, содержащим буровое долото 406. Буровая система на основе мотора 403 может также содержать забойный двигатель 408 для увеличения скорости вращения или крутящего момента, приложенного к буровому долоту 406 и отклоняющему переводнику 404, который является частью скручивающей силовой секции забойного двигателя 408, для управления направлением бурения ствола скважины. Корпус подшипника 407 соединяется с узлом подшипника, который также является частью забойного двигателя 408 и обеспечивает удержание приводного вала 405 во время включения и выключения нагрузки, а также удерживает приводной вал 405 в радиальном направлении с помощью радиальных опорных подшипников для удержания приводного вала 405 по центру в узле подшипника. Следовательно, отклоняющий переводник 404 отклоняет буровое долото 406 в требуемом направлении или направлении торца долота. При сдвиге бурильной колонны (не показана или не помечена) направление торца долота не меняется и, таким образом, буровое долото 406 остается отклоненным в фиксированном направлении, что содействует бурению ствола скважины в требуемом направлении под требуемым углом. В случае, когда желательно выполнить бурение в другом направлении, торец долота ориентируется от поверхности до точки в новом направлении, и для того чтобы начать бурение и направить торец долота в новом направлении к буровому долоту 406 прикладывается масса или сила. В случае, когда необходимо бурить прямо, бурильная колонна может вращаться, причем бурильная колонна вращает корпус подшипника 407 с забойным двигателем, в результате чего направление торца долота будет неизменным и не будет отклоняться от оси бурильной колонны при вращении бурового долота 406. Как проиллюстрировано на Фиг. 4, буровое долото 406 усредняет направление бурения нового ствола скважины, которое, как правило, является прямым. В одном варианте реализации изобретения система датчиков 402 может соединяться с приводным валом 405, который может служить в качестве источника для привязки к северному магнитному полюсу. Система датчиков 402 может располагаться рядом или внутри бурового долота 406, или может располагаться выше в буровой системе на основе мотора 403 или бурильной колонне таким образом, чтобы не интерферировать с ферромагнитными и магнитными материалами расположенных ниже узлов. В одном варианте реализации изобретения компоненты, расположенные в забое скважины, могут быть выполнены из немагнитного материала так, чтобы система датчиков 402 находилась ближе к нижней части бурильной колонны, настолько насколько возможно, благодаря чему улучшается управление. Благодаря использованию немагнитных материалов можно предотвратить появление пути магнитной цепи на бурильной колонне из-за шунтирующего воздействия магнитного потока на источник магнитного поля, соответственно, может быть уменьшена величина магнитного потока, используемого для зондирования. В другом варианте реализации изобретения гироскоп с ориентацией на север может располагаться вблизи наддолотного переводника бурильной колонны, чтобы обеспечить направление на север или привязку к фиксированному направлению либо при вращении, либо при остановке бурильной колонны. Магнитометры, выполненные с возможностью измерения магнитного поля Земли, также могут использоваться для определения магнитного направления на юг совместно с акселерометрами для отделения части горизонтальной плоскости магнитного поля Земли. Направление или ориентация, определяемые с помощью системы датчиков 410 или взаимосвязанных устройств, датчиков и инструментов, могут использоваться для определения относительного направления к цели, например, к целевой скважине, на основании показаний датчика магнитного сопротивления системы датчиков 410. В другом варианте реализации изобретения система датчиков 410 может содержать акселерометры для определения местоположения, ориентации, гравитационной и другой информации, связанной с бурильной колонной. Например, акселерометры могут использоваться для определения привязки к верхней стороне и нижней стороне ствола скважины для системы датчиков 410 при работе под некоторым углом относительно направления вниз. Для того чтобы позволить оператору поддерживать ориентацию в заданном направлении, данные об ориентации могут передаваться на поверхность с помощью системы телеметрии, такой как система телеметрии по гидроимпульсному каналу связи, провода бурильной трубы, акустическая телеметрия или система электромагнитной телеметрии. Данные об ориентации также могут передаваться скважинному автоматическому контроллеру торца долота для содействия автоматизированному контроллеру в поддержании заданного значения или направления торца долота. Например, два ортогональных акселерометра (например, ориентированные по оси x и оси y) могут быть выполнены как единое целое с системой датчиков 410 для определения ориентации и относительного позиционирования, включая верхнюю сторону в наклонном положении.
В другом варианте реализации изобретения датчик 412 также может быть выполнен как единое целое вместе с корпусом подшипника 407, отклоняющим переводником 404 или корпусом забойного двигателя 408, а не в наддолотном переводнике бурильной колонны или буровом долоте. Например, датчик 412 может быть выполнен таким образом, чтобы предотвратить вращение во время скольжения с целью направления долота, поскольку датчик 412 также может механически соединяться либо непосредственно, либо косвенно с корпусом подшипника 407, и может располагаться над или под корпусом подшипника 407, не будучи механически соединенным с приводным валом 405, вращаемым за счет гидравлической энергии потока бурового раствора в бурильной колонне, причем бурильная колонна остается неподвижной. В одном варианте реализации изобретения желательно чтобы датчик 412 располагался настолько близко к буровому долоту 406 насколько это возможно, для точного определения близости к целевому объекту относительно бурового долота 406.
На Фиг. 5 проиллюстрировано графическое представление поперечного сечения магнитного поля при отсутствии намагничиваемого объекта возле бурового инструмента 500 в соответствии с описанными вариантами реализации изобретения. Как проиллюстрировано на Фиг. 5 система датчиков 502 располагается рядом с буровым долотом 504. В одном варианте реализации изобретения система датчиков 502 может содержать один или более постоянных магнитов для создания выталкивающего эффекта, вытягивающего форму магнитного поля 506 от одноименных полюсов, в данном случае северных полюсов, для выталкивания магнитного потока наружу в радиальном направлении, причем магнитное поле в большей мере фокусируется в этом месте в радиальном направлении от оси бурового инструмента 500. Как проиллюстрировано на Фиг. 5 магнитное поле 506 не взаимодействует ни с какими намагничиваемыми объектами.
Как проиллюстрировано, магнитное поле 506 представляется изотропными линиями напряженности поля, исходящими от множества выталкивающих магнитов (например, двух магнитов). Магнитное поле 506 может отличаться по внешнему виду в зависимости от реальных условий, геометрии, магнитных свойств корпуса цели, материалов, используемых для изготовления бурового долота, пластов вблизи системы датчиков 502 и компонентов бурового инструмента 500 (включая узлы управления направлением бурения и наддолотного переводника бурильной колонны).
Обратимся к Фиг. 6А-С. На Фиг. 6А проиллюстрировано графическое представление поперечного сечения бурового инструмента 600 в присутствии намагничиваемого объекта 606 в соответствии с описанными вариантами реализации изобретения. Одним из улучшений иллюстративных вариантов реализации изобретения по сравнению с предыдущими датчиками с постоянными магнитами является то, что магнитное поле 602 вокруг продольной оси бурового инструмента 600 может быть одинаковым по форме по сравнению с трансаксиальными магнитами, используемыми в различных способах измерения расстояния с использованием вращающихся магнитов. В результате, система датчиков 604 бурового инструмента 600 имеет большую чувствительность в ближней зоне эффектов намагничивания, которые могут нарушить плотность магнитного потока в магнитной цепи системы датчиков 604.
На Фиг. 6В проиллюстрирована система датчиков 604, показанная на Фиг. 6А. В одном варианте реализации изобретения для создания выталкивающего эффекта используются два постоянных магнита 608 и 610 (например, кольцевые магниты) или два электромагнита, которые создают магнитное поле при протекании электрического тока через обмотки (не показаны). Магниты 608 и 610 располагаются близко друг к другу, но необязательно напротив друг друга таким образом, что дипольные моменты каждого магнита 608 и 610 приблизительно совпадают и противоположны друг другу вдоль продольной оси системы датчиков 604. Например, первый магнит 608 может иметь противоположный северный полюс напротив северного полюса второго магнита 610 таким образом, что полюсы обращены друг к другу. Аналогично и южные полюса каждого магнита 608 и 610 могут совпадать и быть обращены друг к другу в таком расположении. Это часто называют эффектом выталкивающего магнита. Таким образом, магнитные линии потоков, выходящие с каждой стороны, создают противоположную силу отталкивания друг напротив друга для выталкивания магнитов 608 и 610, а не притяжения друг к другу (в случае расположения северного полюса одного магнита напротив южного полюса другого магнита).
В одном варианте реализации изобретения система датчиков 604 может содержать датчик положения 628, выполненный с возможностью определения положения магнитов 608 и 610. Датчик положения 628 может также показывать расстояние между магнитами 608 и 610 для определения выталкивающего эффекта, а также параметров и характеристик магнитного поля.
Система датчиков 604 может дополнительно содержать по меньшей мере один исполнительный привод 612 и 614. Хотя проиллюстрировано несколько исполнительных приводов 612 и 614, исполнительные приводы 612 и 614 могут быть заменены одним исполнительным приводом. Первый исполнительный привод 612 выполнен с возможностью перемещения первого магнита 608 вдоль продольной оси системы датчиков 604, а второй исполнительный привод 614 аналогично выполнен с возможностью перемещения второго магнита 610. В других вариантах реализации изобретения исполнительные приводы 612 и 614 также выполнены с возможностью перемещения магнитов 608 и 610 горизонтально, вращательно, или в любом трехмерном направлении. С помощью перемещения магнитов 608 и 610 одного к другому или одного от другого настраивается выталкивающий эффект, используемый в системе датчиков. В другом варианте реализации изобретения приводы 612 и 614 могут определять или показывать относительные положения магнитов 608 и 610 для определения параметров и воздействий магнитного поля.
В одном варианте реализации изобретения, в котором система датчиков 604 и связанное с ней буровое долото 624 использовались для фрезерования обсадной колонны, или для максимального приближения к намагничиваемому объекту, расстояние между двумя выталкивающими кольцевыми магнитами 608 и 610 может быть настроено для обеспечения максимальной плотности потока по радиусу бурового долота 624, при этом увеличивая плотность потока, проходящего через магнитометр 616 (или градиентометры). В одном варианте реализации изобретения система датчиков 604 перед использованием в скважине калибруется с помощью процесса калибровки или магниты 608 и 610 могут устанавливаться на буровой площадке в заранее определенные положения на основе требований для следующего цикла работы долота. Для настройки фокуса радиального поля можно управлять расстоянием между магнитами 608 и 610 в скважине в режиме реального времени. Например, датчик положения 628 может использоваться для определения корректировок для настройки поля. В одном варианте реализации изобретения по меньшей мере один кольцевой магнит (например, магнит 608) крепится к исполнительному приводу 612 (например, скользящему поршню), который приводится в действие для перемещения кольцевого магнита 608 ближе или дальше от другого кольцевого магнита 610. В одном варианте реализации изобретения кольцевые магниты 608 и 610 могут быть цилиндрическими с полым или заполненным сердечником.
Желательно перемещать оба магнита 608 и 610 на равные расстояния только вдоль продольной оси инструмента, причем магнитометры 616 и 617 остаются в центральной точке между двумя кольцевыми магнитами 608 и 610 с выбранным радиальным смещением.
Регулировки положения или расположения магнитов 608 и 610 могут выполняться для регулировки пиковой радиальной точки потока или плотности потока либо дальше, либо ближе к продольной оси магнитов 608 и 610.
В одном варианте реализации изобретения магнитометр 617 может также устанавливаться или выполняться как единое целое с одной или более выдвижными колодками 618. В одном варианте выдвижные колодки 618 располагаются в том же продольном положении, что и система датчиков 604, но в разных кольцевых позициях с системой датчиков 605, так чтобы выдвижные колодки 618 находились на одной линии с выталкивающим полем магнитов 608 и 610. Выдвижные колодки 618 могут радиально перемещаться по направлению к системе датчиков 604 и от нее для содействия оптимизации положения магнитометра 617. В одном варианте реализации исполнительный привод положения колодок 620 может перемещать выдвижные колодки 618 от продольной оси системы датчиков 604. Например, выдвижные колодки 618 могут увеличить магнитный поток, проходящий через магнитометр 617 или пересекающий его в фокальном радиусе. Благодаря возможности перемещения магнитометра 617 ближе к намагничиваемой конструкции может увеличиваться чувствительность системы датчиков 604 к намагничивающему полю, создаваемому в намагничиваемой конструкции с помощью выталкивающего магнитного поля. Магнитометр 617 перемещается в радиальном направлении на выдвижных колодках 618 вдоль оси чувствительности магнитометров.
В одном варианте реализации изобретения, местоположение магнитометра 617 может определяться с помощью исполнительного привода положения колодок 620. В другом варианте реализации изобретения местоположение магнитометра 617 может определяться с помощью датчика положения 626. Например, датчик положения 626 может определять положение магнитометра 617 на выдвижных колодках 618. Положение магнитометра 617 может определяться относительно неподвижного магнитометра 616.
В одном варианте реализации изобретения может быть полезно установить один стационарный магнитометр 616 на корпусе инструмента, одинаково выровненного с магнитометром 617, таким образом, позволяя регулировать радиальное приращение между двумя магнитометрами 616 и 617, которое может использоваться для изменения чувствительности градиента магнитного поля в радиальном направлении от системы датчиков 604. Датчик радиального расстояния, аналогичный датчику положения 626, может использоваться для контроля и расчета радиального приращения между двумя магнитометрами 616 и 617 для градиента поля с учетом расстояния между двумя магнитометрами 616 и 617, причем градиентометр определяет в магнитной цепи расстояние до намагничиваемой конструкции. Аналогичным образом с помощью магнитометров 616 и 617 может выполняться измерение напряженности.
В одном варианте реализации изобретения магнитометр 617 может состоять из двух радиально расположенных магнитометров на выдвижных колодках 618, которые также выполнены с возможностью измерения градиента перемещаемого поля с помощью двух магнитометров. Для измерения градиента поля могут также использоваться другие средства с использованием одного магнитометра в различных радиальных положениях выдвижных колодок 618.
В одном варианте реализации изобретения главный контроллер магнитного поля 622 (или процессор) может контролировать положение магнитов 608 и 610 и любых датчиков, таких как магнитометр 617. Контроллер 622 может быть соединен с возможностью передачи данных с одним или более датчиками положения 628 и приема входных сигналов от датчика положения магнитов 608 и 610. В ответ на входные сигналы от одного или более датчиков положения 628 главный контроллер магнитного поля 622 может подавать на выход сигналы управления для множества исполнительных приводов 612 и 614 на основе одного или более алгоритмов управления, выполняемых с помощью контроллера, для перемещения магнитов вдоль продольной оси системы датчиков, горизонтально, вращательно, или в любом трехмерном направлении, для регулировки эффекта выталкивания, используемого системой датчиков. Один или более алгоритмов главного контроллера магнитного поля управляет движением магнитов 608 и 610 и магнитометра 617 (или градиентометра) на основе заранее определенных положений, обнаруженных условий, автоматически реализуемых алгоритмов, или в ответ на команды, поступающие с поверхности с помощью нисходящего канала телеметрии, такого как электромагнитная связь, акустическая телеметрия, телеметрия с помощью изменяющегося крутящего момента бурильной колонны, телеметрия с помощью скорости вращения бурильной колонны, бурильная труба со встроенным кабелем для передачи сигнала или гидроимпульсная телеметрия. В результате, положение магнитов 608 и 610, магнитометра 617 или других датчиков может быть оптимизировано на основе условий, производительности системы датчиков 604, или радиального расстояния до намагничиваемой структуры. В одном варианте реализации изобретения один или более алгоритмов управления находятся в главном контроллере магнитного поля. В других вариантах реализации изобретения один или более алгоритмов управления находятся в одном или более процессоров, расположенных на поверхности, таких как компьютер, планшетный компьютер, беспроводное устройство, портативный компьютер или мобильная вычислительная система, соединенные с возможностью передачи данных с главным контроллером магнитного поля.
В процессе пересечения может корректироваться радиальное положение магнитометра 617 и осевое положение магнитов 608 и 610 для максимального увеличения отклика на магнитное сопротивление, поскольку в зависимости от расстояния до намагничиваемой конструкции автоконфигурация системы датчиков 604 изменяется таким образом, чтобы чувствительность была максимальной. Данными изменениями также можно управлять с помощью системы управления с обратной связью, в которой расстояния до выдвижной колодки 618 и магнитов 608 и 610, а также их положения динамически настраиваются с целью получения максимального отклика от намагничиваемой конструкции. В одном варианте реализации изобретения система датчиков 604 может динамически настраиваться или плавно настраиваться с использованием позиционирования магнитов, датчиков и других компонентов или напряженности магнитного поля.
На Фиг. 6С проиллюстрирован выталкивающий эффект магнитов 608 и 610 в соответствии с описанными вариантами реализации изобретения. Как известно, противоположные полюса притягиваются друг к другу, а линии индукции магнитов, совпадающие по противоположным полюсам, проходят между полюсами без особых изменений (не показаны). Однако, как проиллюстрировано на Фиг. 6С, позиционирование двух одинаковых полюсов двух магнитов 608 и 610 выталкивает магнитное поле, при этом радиально расширяя магнитное поле от магнитов и создавая выталкивающий эффект, описанный в данной заявке.
На Фиг. 6А магниты 608 и 610 в системе датчиков 604 могут накладывать поляризирующую намагничивающую силу на ферромагнитный материал или парамагнитный материал в целевом объекте 606. Поскольку буровое долото 624 вращается, угол наклона магнитного поля 602 может оставаться фиксированным в направлении ферромагнитного материала намагниченного целевого объекта 606. В результате, одна сторона системы датчиков 604 может иметь результирующее магнитное поле 602, отличное от магнитного поля в условиях отсутствия ферромагнитного или парамагнитного материала (например, Фиг. 5).
Если поляризующее магнитное поле от кольцевых магнитов 608 и 610 является достаточно сильным, ферромагнитный материал целевого объекта 606 может реагировать на добавочное магнитное поле к поляризующему полю, воздействующему на ферромагнитный материал. Поскольку ферромагнитный материал целевого объекта 606 уже имеет остаточную магнитную поляризацию, остаточное магнитное поле может противодействовать или добавляться к поляризующему полю от кольцевых магнитов 608 и 610. По мере увеличения напряженности поляризирующего поля в ферромагнитном материале, магнитные домены в целевом объекте 606 начинают совпадать с поляризующим полем, при этом суммируясь с общей напряженностью магнитного поля в магнитной цепи, используемой системой датчиков 604. Воздействие поля вторичного намагничивания также может обнаруживаться путем придания изменения во времени поляризующему магнитному полю на требуемой частоте, например 10 Гц, для более явного обнаружения ферромагнитного материала с помощью магнитной индукции. Это может достигаться с помощью использования обмотки электрической катушки в качестве источника выталкивающего магнитного поля или в качестве дополнения к магнитному полю постоянных магнитов, таким образом, создавая статическое и динамическое поляризующее магнитное поле для применения в условиях системы датчиков 604.
В случае, когда остаточный магнетизм в ферромагнитном материале противоположен выравниванию диполей, например, поле северной поляризации противопоставляется остаточному полю северной поляризации, результирующая напряженность магнитного поля или магнитного градиента, обнаруженная с помощью магнитометра 616 или градиентометра, фактически может быть меньше, чем обнаруженная на неферромагнитной стороне. Как следствие, разница напряженности статического магнитного поля может использоваться как указатель местоположения, независимо от того добавляется или вычитается в данный момент поле намагниченности ферромагнитных материалов из результирующего магнитного поля или градиента магнитного поля, обнаруженного магнитометром. В одном варианте реализации изобретения магниты 608 и 610 могут создавать поляризующее магнитное поле достаточное чтобы вызвать магнитное выравнивание ферромагнитного материала целевого объекта 606 для создания добавочного намагничивающего поля к приложенному поляризующему полю. Магниты 608 и 610 могут создать поляризующее поле, достаточное для того, чтобы ввести близлежащий ферромагнитный материал в состояние магнитного насыщения или близкое к нему, так чтобы значительная часть напряженности поля намагниченности была доступна для обнаружения датчиком магнитного сопротивления. Данные, определенные путем обнаружения различий в используемом магнитном потоке, используются для определения расстояния или направления на целевой объект 606.
На Фиг. 6D проиллюстрирован другой вариант реализации изобретения, в котором магнитопроводы 625 в корпусе 621 могут изменить траекторию магнитного потока, созданного магнитами 608 и 610, направляя поток вдоль более желательного радиального пути. В одном варианте реализации изобретения магнитопроводы выполнены из материала с высокой магнитной проницаемостью, который имеет низкое сопротивление для магнитного потока, например мягкого железа, феррита или пермаллоя. Как проиллюстрировано, магнитопроводы 625 могут направлять поток по пути, а датчики 623 могут размещаться на пути. Магнитопроводы 625 могут присоединяться к полюсам магнитов 608 и 610 или находиться в непосредственной близости к полюсам магнитов 608 и 610. Магнитопроводы 625 позволяют уменьшить воздушный зазор и улучшить форму используемого магнитного поля.
Как описано выше, датчики 623 могут быть представлены магнитометрами, градиентометрами или другими датчиками магнитного поля. Магнитопроводы 625 могут изменить траекторию магнитного потока, направляя поток вдоль более желательного радиального пути и позиционируя датчики 623 на этом пути. Например, градиентометр может располагаться в центральной точке наружного радиуса магнитопровода. Как описано в данной заявке, датчики 623 также могут устанавливаться на подвижных или неподвижных колодках. В других вариантах реализации изобретения магниты могут быть поляризованными или иметь форму, требуемую для максимального увеличения напряженности радиального поля.
На Фиг. 7А-С проиллюстрировано схематическое, графическое представление инструмента для направленного бурения 700, используемого для пересечения скважины 702, которая может быть существующей или целевой скважиной в соответствии с описанными вариантами реализации изобретения. Иногда возникает необходимость пробурить пересекающую скважину 704 с использованием бурового инструмента 700 для устранения проблемы или препятствия 708 в рамках существующей скважины. Например, пересекающая скважина 704 может быть разгрузочной скважиной, пробуренной для устранения нерегулируемого выброса на верхнем конце скважины 702. В некоторых случаях требуется объединить только жидкость между двумя скважинами. Однако может возникнуть ситуация, когда желательно повторно войти в нижнюю часть существующей скважины для заканчивания или работы над оборудованием, доступным или расположенным в нижней части существующей скважины. Такое оборудование может содержать, но не ограничивается этим, противопесочные фильтры, мостовые пробки, вкладыши или корпуса, пакеры, соединители для многоствольных скважин или любое другое постоянное или временное оборудование, например, самописцы данных давления, расходомеры, оборудование для гидроразрыва пласта, вакуумные насосы для песка, желонки, оборудование для ловильных работ, оборудование для стимуляции скважин, оборудование для цементирования скважин или инструменты для подземного ремонта. Пересечение может также позволить выполнить постоянную закупорку секции скважины с помощью цементировочного оборудования или цементирования в пересекаемой скважине.
Во многих случаях пересечение скважины 702 может быть затруднено. Например, может быть сложно пересечь намагничиваемую металлическую трубу 710, например, обсадную колонну или вкладыш мертвой точки скважины. Оператор может использовать специализированную фрезу 712 для бурения в трубе 710 скважины 702, как проиллюстрировано на Фиг. 7В и 7С. Например, для выполнения пересечений металлической трубы 710 может использоваться фрезерное долото или фреза 712. Фреза 712 может предназначаться для резки стали или других твердых материалов. В одном варианте реализации изобретения азимутальные профили вырезанного отверстия в скважине 702 могут контролироваться как профиль измерений магнитного сопротивления для указания, находится ли фреза 712 по центру при сверлении трубы 710 целевой скважины. Например, азимутальные профили (также называемые профилями магнитного сопротивления) могут представлять величину магнитного поля, измеренную по окружности инструмента.
В одном варианте реализации изобретения диаграммы направленности 714 и 716 (например, графические представления профиля магнитного сопротивления для заданного радиального направления с использованием цилиндрических координат) напряженности намагничивающего поля, измеренной датчиком магнитного сопротивления из трубы 710, могут использоваться для определения направления и имитации взаимодействия фрезы 712 и трубы 710. Например, азимутальной профиль или профиль магнитного сопротивления может представлять данные измерений датчиков и диаграмм направленности 714 и 716, проиллюстрированных в одном из примеров в виде графика в прямоугольной системе координат, могут представлять отображение, с помощью которого пользователь может выполнять анализ. В результате управление направлением бурения может изменяться для удержания торца долота системы управления направлением бурения в середине трубы 710 для выполнения правильного и эффективного пересечения. Хотя данная операция обычно не выполняется для скважин, имеющих неконтролируемый выброс, она может использоваться для повторного входа в трубу 710 в случае, когда выше точки пересечения имеется препятствие 708 или срезанный или разрушенный участок скважины 702. Инструмент для направленного бурения 700 может также использоваться для обнаружения бокового отверстия в обсадной колонне или скважинного компонента. В результате, элемент для управления направлением бурения может быть отклонен, повернут или ориентирован на отверстие для облегчения входа.
На Фиг. 7В проиллюстрирована фреза 712 должным образом пересекающая трубу 710 на основе физического взаимодействия и диаграмм направленности 714. На Фиг. 1С проиллюстрирована фреза 712, перекошенная в одну сторону, что указывает на то, что фреза 712 и труба 710 не были выровнены должным образом. График в полярных координатах, отклик, или профиль диаграммы направленности 716 указывают на то, что направление торца долота не расположено прямо по центру трубы 710. С помощью мониторинга диаграмм направленности 714 и 716 намагничивающего поля, обнаруженных датчиком магнитного сопротивления, системой датчиков (или альтернативным пользователем) возможно более точное выравнивание инструмента, например, фрезы 712, во время фрезерования, чтобы добиться возвращения или по меньшей мере повторного пересечения трубы 710. Например, фреза 712 может использоваться для повторного входа в отверстие или компонент в ранее созданном или образовавшемся отверстии или месте. В таком случае система датчиков может быть в состоянии предотвратить выход фрезы 712 из трубы 710, особенно в случае мягких геологических пластов вокруг точки пересечения.
Результаты измерений магнитного сопротивления могут азимутально группироваться в дуговые сегменты азимутальных профилей диаграмм направленности 714 и 716 инструмента и могут включать глубину установки или время измерения датчика и фрезы 712, долота, или других устройств для пересечения, таких как лазерный режущий аппарат или высокоскоростная режущая струя жидкости, которые могут использоваться для любого числа фрезерных или буровых операций, а также для контроля за ходом фрезерования целевой скважины, например, в реверсивных многоствольных скважинах или пересечении скважин, в которых окно фрезеруется снаружи в целевую скважину после установки трубы 710. Данные, передаваемые от датчика(ов) к контроллеру управления направлением бурения или оператору на поверхности, позволяют контролировать отклик датчика в зависимости от направления, например, путем построения графика величины и направления измеряемой напряженности или градиента магнитного поля, окружающего датчик.
Контроллер управления направлением бурения является одним или более скважинным инструментом для управления направлением бурильной колонны. Он может содержать компоновку низа бурильной колонны и систему датчиков с соответствующим буровым долотом. Например, контроллер управления направлением бурения является инструментом для наклонно-направленного бурения роторным способом для направленного бурения скважин и разведки. Контроллер управления направлением бурения может быть выполнен с возможностью поворота, сгибания, активации, или изменения направления, положения и ориентации иным образом. Контроллер управления направлением бурения может функционировать автоматически или в соответствии с командами оператора, полученными от компьютера, расположенного на поверхности или других устройств, расположенных на поверхности.
В одном варианте реализации изобретения данные, отправленные на поверхность, могут ограничиваться по величине и направлению максимальных значений и направлению, измеренной напряженности поля по окружности датчика состояния инструмента. Благодаря более высокой плотности данных возможно отслеживание профиля величины в зависимости от глубины или времени на полярных профилях диаграммы направленности 716.
На Фиг. 8А-С проиллюстрировано поперечное сечение системы датчиков в соответствии с описанными вариантами реализации изобретения. В одном варианте реализации изобретения система датчиков 800 может содержать корпус 802, кольцевой магнит 804, приводной вал 806 и отверстие для бурового раствора 808.
В одном варианте реализации изобретения кольцевой магнит 804 является одним или более постоянными магнитами. В другом варианте реализации изобретения кольцевой магнит 804 может являться одним или более электромагнитами или комбинацией электромагнитов и постоянных магнитов. Благодаря использованию электромагнитов возможна настройка магнитного поля в режиме реального времени или использование изменяющегося во времени магнитного поля. Также они могут быть более эффективными при высоких температурах. Мощность, подводимая к электромагнитам, может регулироваться до требуемого уровня с помощью тока подмагничивания для того, чтобы вызвать намагниченность ферромагнитного материала цели с нужной магнитной поляризацией в соответствии с приложенным поляризующим полем электромагнитов, при этом дополнительно включая ток, изменяющийся во времени.
Для намагничивания материала цели может использоваться множество постоянных магнитов и электромагнитов возможных типов и направлений. Например, может использоваться метод фокусированного поля, которое имеет радиальную направленность вдоль продольной оси инструмента, а не вдоль поперечной оси инструмента, как было показано ранее. В данной конфигурации поляризующее поле, влияющее на ферромагнитную цель, из-за вращения вала имеет переменный отклик намагниченности. При размещении датчика в радиальном положении, в радиальном направлении обнаружения, идеально между полюсами С-С или Ю-Ю, при попадании цели из ферромагнитного материала в диапазон обнаружения датчика во время вращения могут обнаруживаться изменения магнитного сопротивления магнитной цепи. Для не вращающихся датчиков, например, при скольжении с забойным двигателем в случае, когда датчик находится на корпусе забойного двигателя (а не выходного вала) или в не вращающемся корпусе инструмента для наклонно-направленного бурения роторным способом для определения направления на намагничиваемый объект относительно поперечной оси инструмента может использоваться ряд датчиков по окружности инструмента.
Возможны и другие конфигурации, а также другие направления поляризации источника магнитного поля. Целью реализованных иллюстративных вариантов реализации изобретения является оказание максимального влияния на магнитный поток в радиальном направлении от продольной оси инструмента. При использовании кольцевых магнитов для выталкивания магнитного поля в радиальном направлении от продольной оси существует преимущество в том, что продольная длина магнетика может быть легко увеличена за счет увеличения высоты конструкции магнита и, следовательно, приводит к более сильной радиальной поляризации магнитного поля. При использовании других геометрических форм может быть недостаточно свободного места для магнитов большего размера из-за того, что приращение напряженности магнитного поля становится функцией диаметра скважины.
Данные, собранные с помощью датчика магнитного сопротивления, могут передаваться посредством электрического проводника с использованием или без использования контактных колец или других вращающихся электрических муфт. В другом варианте реализации изобретения данные могут передаваться с помощью беспроводной связи малого радиуса действия к системе телеметрии большого радиуса действия или к контроллеру управления направлением бурения, например, инструменту для наклонно-направленного бурения роторным способом или системе управления торцом долота на поверхности или в скважине так, чтобы можно было выполнить расчеты направления, активации, регулировки и т.д. Скважинный прибор, например, скважинный отклонитель может использоваться в верхней части КНБК или бурового двигателя, и выполнен с возможностью регулировки углового положения сгиба торца долота бурового двигателя в нужном направлении для направленного бурения относительно целевой намагничиваемой конструкции. Управление данным направленным бурением с помощью любой из данных поверхностных, скважинных систем управления направлением бурения, или систем ориентации может выполняться на основе автоматического отклика с помощью контроллера управления направлением бурения в ответ на данные о положении, полученные от датчика магнитного сопротивления, например поддержание направленного бурения на требуемое пересечение или по заданной траектории. Следовательно, система датчиков 800 может использоваться в сочетании с автономной системой направленного бурения, причем заранее заданная цель для направленного бурения (например, пересечение со скважиной или конструкцией) заранее программируется в скважинном или поверхностном контроллере управления направлением бурения или перепрограммируется с поверхности, при необходимости, путем передачи команд с помощью нисходящего канала системы телеметрии, находящейся на поверхности или вблизи поверхности, например, системы телеметрии по гидроимпульсному каналу или других способов телеметрии, описанных в данной заявке. Система управления направлением бурения может использовать данные, полученные от системы датчиков 800, для следования по траектории относительно целевой скважины или пересечения целевой скважины на нужной глубине. Данные о пласте также могут ссылаться на данные коррекции, хранящиеся в скважинном узле управления направлением бурения для отслеживания местонахождения забоя скважины относительно заданной траектории и точки пересечения, если применимо. Кроме того, контроллер управления направлением бурения выполнен с возможностью автоматического пересечения в случае обнаружения благоприятных условий пласта, например, пласт с высокой прочностью на сжатие, а не мягкая порода вокруг материала цели.
Данные, считанные системой датчиков 800, могут передаваться на поверхность и обрабатываться на буровой площадке или за ее пределами, например, в удаленном центре обработки в режиме реального времени с помощью передачи данных от буровой площадки по сети передачи данных. Команды управления направлением бурения могут передаваться обратно в скважинный узел по нисходящей линии связи системы телеметрии, расположенной на поверхности или вблизи поверхности, например, посредством гидроимпульсов, бурильной трубы со встроенным кабелем для передачи сигнала, электромагнитной телеметрии, акустической телеметрии, торсионной телеметрии, сейсмической связи и т.д. В другом варианте реализации изобретения магнитное поле может создаваться за счет использования электромагнитов вместо кольцевого магнита 804.
Проиллюстрированная на Фиг. 8В система датчиков 800 может содержать магнитометры 810. В одном варианте реализации изобретения магнитометры 810 являются радиально ориентированными по оси чувствительности магнитометрами, идеально выровненными точно по центру между двумя выталкивающими магнитами для обнаружения максимального выталкивающего поля в радиальном направлении от системы датчиков 800. В то время как в данном варианте реализации изобретения проиллюстрирован массив магнитометров 810, требуется только один магнитометр и градиентометр в случае, когда система датчиков 800 вращается вместе с корпусом наддолотного переводника бурильной колонны и датчик направления торца долота (не показан) может использоваться для измерения профиля магнитного поля и, следовательно, магнитное сопротивление по окружности системы датчиков 800 используется для определения величины и направления напряженности магнитного поля или магнитного градиента в азимутальном виде. Как правило, направление датчика торца долота может измеряться с помощью двух ортогонально ориентированных акселерометров, например, по одному на каждой оси X или Y, пересекающих направление продольной оси. Данные акселерометры могут использоваться для обнаружения верхней стороны наклонного ствола скважины. В другом варианте реализации изобретения система датчиков 800 выполнена с возможностью настройки направленного бурения на основе обнаруженного с помощью датчиков магнитного сопротивления намагничивающего поля.
Следовательно, за счет использования ряда магнитометров 810 возможно устранить необходимость в привязке по направлению, поскольку может быть измерен азимутальный профиль намагничивающего поля от намагничиваемых материалов. В другом варианте реализации изобретения система датчиков 800 может ссылаться на начальное положение бурового инструмента или узла управления направлением бурения, например, направлением изгиба узла управления направлением бурения. В результате, может отпасть необходимость в верхней стороне или магнитной привязке, при этом данные функции выполняет датчик положения, который контролирует ориентацию приводного вала 806 относительно значения по умолчанию, начального положения или начальной точки вращательного пути вала. Например, на приводном вале 806 может быть закреплен датчик на эффекте Холла, соединенный с процессором системы датчиков 800 для определения, в какой точке находится датчик относительно торца долота инструмента для направленного бурения во время вращения. Магнитометры 810 могут использовать измеренное изменение фонового магнитного поля Земли в процессе вращения для определения местоположения каждого магнитометра 810 при вращении и вычисления направления на целевой объект относительно торца долота инструмента для направленного бурения. Датчик опорной системы координат также может быть объединен с магнитометрами 810, причем при остановке вращения выполняется триангуляция и вычисление, при этом максимальное значение напряженности поля измеряется с помощью магнитометров 810. Датчик опорной системы координат, например гироскоп, может использоваться также для поддержания ориентации относительно фиксированного направления. Система датчиков 800 может использовать данную информацию для определения направления на цель относительно верхней стороны бурового инструмента или другой точки отсчета.
Магнитометры 810 могут быть выполнены с возможностью измерения азимутального профиля напряженности магнитного поля по окружности инструмента для устранения ограничений, вызванных прекращением вращения, например, датчик на эффекте Холла, катушка с обмоткой или магнитометр с насыщенным сердечником, предназначенный для высоких значений напряженности магнитного поля. В другом варианте реализации изобретения в системе датчиков 800 может использоваться только датчик переменного тока, который реагирует только на скорость изменения внешнего магнитного поля. Например, в датчике может использоваться чувствительная к индукции обмотка катушки, соосная с направлением поляризующего магнитного поля, распространяющегося от источника магнитного поля в датчике магнитного сопротивления. Как только буровое долото проходит через области высокой и низкой магнитной проницаемости, в обмотке катушки создается индуктивный отклик, который затем может направляться на электронную схему датчика. Чем выше скорость изменения плотности магнитного потока вдоль поперечной оси измерительной катушки, тем выше значение электродвижущей силы (ЭДС), наводимой в катушке, в результате на измерительную цепь датчика поступает ток с более высоким значением и напряжение более высокого значения. Система датчиков 800 также может быть выполнена с возможностью контроля числа оборотов в минуту (об/мин) приводного вала 806 для определения того, сколько магнитометров 810 или других чувствительных катушек проходят через изменяющееся магнитный поток из-за наличия намагничиваемой цели.
На Фиг. 8С проиллюстрирована система датчиков 800, которая может содержать градиентометры 812. Градиентометры 812 могут быть представлены парами радиально расположенных и радиально чувствительных одинаково выровненных магнитометров в направлении поперечной плоскости продольной оси инструмента. Расстояние между соответствующими градиентометрами 812 может быть оптимизировано для каждой части с целью измерения градиента радиального поля, в котором имеется пик чувствительности к изменениям напряженности радиального поля. Например, внутренние магнитометры градиентометров могут размещаться в таком положении, при котором присутствует значительная часть радиального магнитного поля. В другом варианте реализации изобретения магнитометры 810 или градиентометры 812 могут применяться для выполнения динамического измерения расстояния. Система датчиков 800 может также использоваться вместе с активной системой измерения расстояния, в которой используется возбуждение переменного электрического тока в материале цели, который затем распространяет характерное магнитное поле в направлении окружности направления протекания электрического тока. Система датчиков 800 может использоваться для измерения магнитного поля, вызванного протеканием тока по цели из внешнего источника возбуждения электрического тока. В результате система датчиков 800 может быть комбинированным устройством.
На Фиг. 9 проиллюстрировано схематическое представление магнитной цепи системы датчиков 900 в соответствии с описанными вариантами реализации изобретения. Воздушный зазор представляет сопротивление протеканию магнитного потока, протекающего в материале с высокой магнитной проницаемостью, например, постоянных магнитах или магнитно-проницаемом материале трубы, которая может представлять цель 902. Магнитная напряженность (Н) постоянных магнитов 904 может быть управляемой. Два источника магнитного потока, представленные электромагнитами 904, могут создавать эффект выталкивания в середину, инициируя протекание потока в первый зазор (G1), который может представлять радиальное распространение выталкивающего поля от бурового инструмента. Электромагниты также могут быть заменены постоянными магнитами с той же полярной ориентацией. Ориентация полюсов может быть несущественной, поскольку оба северных полюса или оба южных полюса постоянных магнитов или электромагнитов сходятся вместе в магнитной цепи. В другом варианте реализации изобретения один источника магнитного поля может быть постоянным магнитом, а другой источник магнитного поля может быть электромагнитом. Кроме того, источник магнитного поля может быть комбинацией постоянного магнита и электромагнита.
Часть магнитной цепи системы датчиков 800 может содержать источник магнитного поля на исходной стороне цепи. В данном случае магнитный поток может направляться или перенаправляться вокруг магнитной цепи, предпочтительно используя материал с высокой магнитной проницаемостью, например, мягкое железо, для направления магнитного потока в требуемую точку выхода и входа в магнитную цепь. В проиллюстрированных ранее примерах не было добавления проницаемого материала в магнитную цепь, кроме самого источника магнитного поля. Однако, это не означает, что магнитный поток не может быть направлен в нужном направлении путем протекания потока через магнитно-проницаемый материал в датчике. Например, на Фиг. 6В проиллюстрирована выдвижная колодка 618, содержащая магнитометр 616, при этом часть магнитно-проницаемого материала может размещаться перед или за магнитометром 616 для уменьшения потерь потока на зазоре, а также для большей концентрации потока через ось чувствительности магнитометра 616 и магнитопроводы 620 на Фиг. 6D.
Снова возвратимся к Фиг. 8D, где корпус 802 и приводной вал 806 могут быть выполнены из немагнитного материала, такого как аустенитная нержавеющая сталь, инконель или другие материалы, используемые для несущих узлов компоновки низа бурильной колонны. Немагнитные материалы могут использоваться таким образом, что целевой объект является единственным компонентом для снижения сопротивления магнитной цепи магнитного поля системы датчиков 800 при входе или выходе цели из диапазона чувствительности системы датчиков 800. В результате корпус 802 и приводной вал 806 не оказывают существенного влияния на магнитное поле. Как проиллюстрировано, кольцевые магниты 804 могут размещаться радиально вокруг приводного вала 806. Градиентометры 812 могут размещаться между кольцевыми магнитами 804 для увеличения чувствительности к изменениям магнитного потока.
Снова возвратимся к Фиг. 9, где магнитный поток протекает через зазор бурового раствора и породы, с низкой магнитной проницаемостью до тех пор, пока не достигнет цели 902 с высокой магнитной проницаемостью, при этом сопротивление протеканию магнитного потока является сравнительно очень низким (например, обычно в 1000-3500 раз выше). Нижние зазоры 906 и 908 (G2 и G3) отличаются тем, что поток покидает цель 902 и возвращается через нижнюю и верхнюю стороны системы датчиков 900, которые в данном случае являются южным полюсом между магнитами 904 (например, верхним и нижним постоянными магнитами). Следует понимать, что магнитометр может также размещаться в нижних зазорах G2 и G3 906 и 908, но как видно плотность потока в G2 и G3 906 и 908 является меньшей, таким образом, положение G1 является наилучшим местом для плотности потока и, таким образом, чувствительным к изменению напряженности потока магнитной цепи или градиента.
В одном варианте реализации изобретения при размещении магнитометра 901 в положении G1 выталкивающее поле распространяется радиально, при этом система датчиков 900 может отслеживать изменения магнитного сопротивления, величину зазора, или массу магнитного материала цели 902 с помощью определения плотности потока или изменений напряженности магнитного поля в данном положении. Например, при увеличении воздушного зазора, плотность потока может снизиться. Изменение величины плотности потока, измеренной с помощью системы датчиков 900, может использоваться для определения относительного и абсолютного расстояния до цели 902. Для получения абсолютного расстояния может понадобиться знание формы и магнитной проницаемости цели 902. Расстояние до цели 902, как измеренное, так и рассчитанное системой датчиков 900, может использоваться для выполнения любого числа операций направленного бурения или уклонения.
В одном варианте реализации изобретения магнитометр 901 может размещаться на выталкивающей стороне, фактически удваивая плотность потока от магнитов 904, проходящего через данную сторону системы датчиков 900. Ориентация полюсов магнитного поля может изменяться для создания азимутальной чувствительности для магнитов 904, которые могут влиять на намагничиваемый материал цели 902. В одном варианте реализации изобретения выталкивающее поле является способом наведения на цель в конкретном направлении или на объект с вращением системы датчиков 900 или без него. В другом варианте реализации изобретения использование магнита с одной поперечной осью может применяться для определения расстояния и направления до цели 902.
В системе датчиков 900 может использоваться алгоритм вычитания нейтрального поля из измеряемого поля, чтобы позволить пользователю или системе указать компоненты обнаруженного сигнала, которые возникают за счет намагничивающих воздействий намагничиваемых материалов в цели, по сравнению со статической формой магнитного поля, вводимого датчиком магнитного сопротивления. Следовательно, в расчетах используется только намагничивающее поле, а поляризующее поле исключается из расчета, поскольку оно известно. Поляризующее поле может лучше определяться для системы датчиков 900 в среде, в которой поблизости нет намагничиваемого материала для создания намагничивающего поля. Эти показания или значения могут использоваться для ввода компенсации, смещения или нулевого значения для датчика, которые могут вычитаться из будущих измерений.
На Фиг. 10 проиллюстрировано схематическое представление системы скважинных датчиков 1000, расположенной в трубе 1002. В одном варианте реализации изобретения труба 1002 может быть представлена обсадной колонной или вкладышем. Система датчиков 1000 может размещаться в любом месте внутри бурильной колонны 1004. Например, система датчиков 1000 может размещаться над узлом управления направлением бурения или выше по бурильной колонне 1004 для облегчения контроля износа трубы 1002, особенно в обсадной колонне или вкладыше для применения "во время бурения" в случае, когда корпус или вкладыш совершают возвратно-поступательные движения. В одном варианте реализации изобретения система датчиков 1000 является азимутальной и может осуществлять поиск признаков эксцентрического или концентрического износа в трубе 1002 из бурильной колонны 1004, поскольку глубина отверстия в скважине увеличивается и труба 1002 подвергается повышенному истиранию из-за трения о стенку ствола скважины.
В одном варианте реализации изобретения система датчиков 1000 может содержать ряд датчиков или систем с требуемыми интервалами или положениями вдоль бурильной колонны 1004. Например, различные системы датчиков могут использоваться для контроля толщины стенки обсадной колонны/вкладыша. При традиционном бурении с помощью бурильной колонны обсадная колонна или вкладыш остаются неподвижными. Поскольку металл в трубе 1002 стирается вращающейся бурильной колонной, напряженность проницаемости (обратная магнитному сопротивлению) намагничивающего поля от обсадной колонны или вкладыша уменьшается. В результате измерение толщины или изменений толщины может выполняться с помощью разницы в намагничивающем поле, создаваемом металлом, который удаляется за счет истирания или фрезерования трубы 1002. В одном варианте реализации изобретения толщина стенки обсадной колонны регистрируется и используется для измерения и прогнозирования будущих проблем или отказов. Например, измеренная толщина стенки обсадной колонны может измеряться на определенной глубине внутри обсадной колонны и данные значения могут сравниваться с предыдущими значениями измерений или ожидаемыми откликами для обнаружения отсутствия ферромагнитного материала, который указывает на износ обсадной колонны (например, более высокое магнитное сопротивление, более низкая проницаемость, измеренные с помощью в магнитной цепи системы датчиков 1000).
Например, на Фиг. 10 проиллюстрирован типовой профиль выработки, где бурильная колонна 1004 содержит различные трубы и взаимосвязанные компоненты, стирающие одну сторону трубы 1002, которая подвергается дальнейшему износу. Система датчиков 1000 может содержать модель для ожидаемой проницаемости обсадной колонны или сначала может измеряться проницаемость новой или подходящей части обсадной колонны (по умолчанию или золотой стандарт), а затем может измеряться снижение проницаемости остальной части трубы 1002 для расчета ухудшения состояния и износа. Эта информация об износе может использоваться для внесения изменений в буровые работы, для остановки бурения и выполнения измерений на месте, установки устройства, системы или произвести операции по защите трубы 1002 от дальнейшего повреждения, если величина повреждения начинает приближаться к пороговым значениям, указывающим на потенциальную опасность или постоянное повреждение, выходящее за допустимые пределы. Датчики могут располагаться по всей длине бурильной колонны 1004 для контроля за изменениями проницаемости и неоднократного измерения областей с новой системой датчиков по мере продолжения бурения для сравнения результатов измерений с момента первого прохода с результатами измерений во время следующего прохода, чтобы убедиться, что никаких заметных изменений не произошло. Данная информация может использоваться для определения того, как бурильная колонна перемещается в трубе 1002.
В одном варианте реализации изобретения система датчиков 1000 может называться каверномером. Система датчиков 1000 может использоваться для измерения относительной величины отклонения (или расстояния) датчика магнитного сопротивления системы датчиков 1000 от трубы 1002 к значению отклонения от центра, как проиллюстрировано на Фиг. 10, для получения лучшего изображения толщины стенки трубы 1002 для полного 360-градусного обзора и анализа трубы 1002.
Модуль телеметрии или связи соединен с возможностью передачи данных или встроен в систему датчиков 1000, например, провода бурильной трубы могут по отдельности адресовать каждый датчик в бурильной колонне к сети передачи данных и передавать измеренные значения и показания от каждого датчика на поверхность или в другое место в бурильной колонне, например, в систему измерения во время бурения (ИВБ)/каротажа во время бурения (КВБ) в компоновке низа бурильной колонны (КНБК). В другом варианте реализации изобретения в ствол скважины может опускаться тросовый инструмент для получения записанных данных от системы датчиков 1000 через беспроводное соединение (например, индуктивная связь, Bluetooth, радиочастота, коммуникации ближнего поля, WiFi, и т.д.). Например, наконечник, поддерживающий интерфейс связи для системы датчиков 1000 и выполненный с возможностью хранения данных, может быть опущен до глубины каждой системы датчиков 1000 для получения данных для дальнейшего извлечения после опроса всех требуемых датчиков и получения данных от них. Измерения, выполненные с помощью системы датчиков 1000, могут передаваться через бурильную колонну 1004 с использованием проводных бурильных труб, беспроводным, сейсмическим, акустическим, магнитным, электромагнитным, торсионным способом связи или с помощью любого числа других способов связи, применимых для скважинных инструментов. В одном варианте реализации изобретения каждая система датчиков 1000 может содержать модуль телеметрии и связи для периодической передачи на поверхность данных, информации и измерений.
Обратимся теперь к Фиг. 11 и 12, на которых проиллюстрировано схематическое представление инструмента для направленного бурения 1100 или прибора для поиска ствола скважины, используемого с разветвленной скважиной 1102 в соответствии с описанными вариантами реализации изобретения. В одном из вариантов реализации изобретения система датчиков 1104 может быть выполнена с возможностью поиска ориентации отверстия в обсадной колонне ответвления 1102, часто называемого окном многоствольной скважины. Например, как проиллюстрировано на Фиг. 11 и 12 ответвление 12 1102 может содержать ответвление, которое отделяется от основного ствола скважины. Система датчиков 1104, содержащая один или более магнитометров 1106 и градиентометров, как вариант, может размещаться в разных местах, например, над поворотным рычагом 1108, как часть корпуса, двигателя или других компонентов бурильной колонны.
Обнаружение ответвления может позволить ориентировать инструмент 1100 для входа в ответвление. Например, оператор может избежать изгиба забойного двигателя инструмента для направленного бурения 1100, например, настроить угол наклона корпуса в скважине, или при работах над инструментом может направить его в ответвление. В других вариантах реализации изобретения другие узлы, кроме узла для направленного бурения, могут работать совместно с этим датчиком для содействия оборудованию для заканчивания скважин, работам над оборудованием, цементировочному оборудованию, оборудованию для гидроразрыва пласта или любому другому оборудованию, для временной или постоянной установки, для избирательного направления к горизонтальному переходу или от него. Система датчиков 1104 также может использоваться для определения местоположения муфты обсадной колонны в целевой скважине, которое может использоваться для записи, отслеживания глубины или сбора информации. Например, информация может использоваться для создания трехмерной модели на основании имеющейся информации о разветвленной скважине. Также система датчиков 1104 может использоваться для обнаружения муфт обсадной колонны в случае, когда датчик находится в скважине соседней с целевой скважиной и таким образом отслеживать глубину датчика относительно целевой скважины.
На Фиг. 13 проиллюстрирована структурная схема буровой системы 1300 в соответствии с описанными вариантами реализации изобретения. В одном варианте реализации изобретения буровая система 1300 может содержать ряд компонентов, включая по меньшей мере систему датчиков магнитного сопротивления 1310, компоновку низа бурильной колонны 1330 и систему, расположенную на поверхности 1350.
Различные компоненты системы датчиков магнитного сопротивления 1310, компоновки низа бурильной колонны 1330, и системы, расположенной на поверхности 1350 могут соединяться с помощью штырей, проводов, дорожек, коммуникационных разъемов, проводов, оптических волокон или других коммуникаций или проводящих компонентов. В другом варианте реализации изобретения весь акустический инструмент или его часть могут встраиваться в отдельную схему или СБИС.
Компоновка низа бурильной колонны 1330 может содержать систему телеметрии большого радиуса действия 1332, инструмент для каротажа во время бурения 1334 (или измерения во время бурения (ИВБ), сейсмических измерений во время бурения (СВБ), только каротажа, и т.д.), контроллер управления направлением бурения 1336, датчики ориентации 1338 и приемопередатчик малого радиуса действия 1340.
Система, расположенная на поверхности 1350, может содержать компьютер, расположенный на поверхности 1352, видеомонитор 1354, память 1356, нисходящий канал передачи данных 1358 и приемник данных 1359. Система, расположенная на поверхности 1350, выполнена с возможностью дополнительной связи с контроллером ориентации 1360 и цифровой сетью 1362.
Система датчиков магнитного сопротивления 1310 может содержать по меньшей мере один градиентометр/или магнитометр или массив градиентометров/магнитометров 1312 (являющийся чувствительной частью датчика магнитного сопротивления), дискретизатор выборки 1314, и процессор системы датчиков 1316, приемопередатчик малого радиуса действия 1318, датчики ориентации 1320 и память 1322. Как проиллюстрировано, массив градиентометров/магнитометров 1312 может содержать отдельный массив магнитометров или сдвоенный набор градиентометров, расположенных в непосредственной близости друг от друга по периферии системы датчиков магнитного сопротивления 1310.
Процессор системы датчиков 1316 может быть представлен одним или более процессорами или микроконтроллерами. Микроконтроллер является небольшим вычислительным компонентом, выполненным на одной интегральной микросхеме, включая, например, процессор, ядро, память и программируемые входы/выходы. В одном варианте реализации изобретения микроконтроллером может быть специализированная большая интегральная схема (СБИС) или программируемая пользователем вентильная матрица (ПЛИС).
Процессор системы датчиков 1316 является схемой или логикой, выполненной с возможностью управления выполнением набора команд. Процессор может являться одним или более микропроцессоров, цифровыми сигнальными процессорами, специализированными интегральными схемами (СБИС), центральными процессорами или другими устройствами, выполненными с возможностью управления электронными устройствами, включая одно или более аппаратных и программных средств, выполняющих программное обеспечение, команды, программы и приложения, преобразование и обработку сигналов и информации, а также выполнение иных связанных с этим задач. Процессор системы датчиков 1316 может быть выполнен в виде одной микросхемы или интегрирован с другими вычислительными или коммуникационными элементами. Процессор системы датчиков 1316 и другие компоненты системы датчика 1302 могут быть выполнены с возможностью работы в скважинных условиях, включая ударные нагрузки, температуру и сопротивление давлению, водонепроницаемость и влагостойкость и т.д.
Процессор системы датчиков 1316 или другой компонент системы датчиков магнитного сопротивления 1310 выполнен с возможностью управления работой бурового инструмента, отправки команд для изменения направления, изменения скорости вращения, разъединения, остановки или запуска одного или более двигателей, долот, режущих инструментов, или вращения устройств, или отправки других команд или инструкций компонентам буровой системы 1300. Команды могут отправляться на основе изменения параметров или измеренных значений напряженности магнитного поля, магнитного сопротивления, проницаемости, плотности магнитного потока, или других параметров.
Память 1322 является аппаратным элементом, устройством или носителем информации, выполненным с возможностью хранения данных для последующего извлечения или доступа в более позднее время. Память 1322 может быть статической или динамической. Память 1322 может включать жесткий диск, оперативную память, кэш-память, съемный носитель, массовое запоминающее устройство или конфигурацию, пригодную для хранения данных, команд и информации. В одном варианте реализации изобретения память 1322 и процессор системы датчиков 1316 могут быть выполнены как единое целое. Память может использовать энергозависимые или энергонезависимые технологии хранения и среды любого типа.
Дискретизатор выборки 1314 может быть выполнен с возможностью оцифровки выборок данных, считываемых массивом градиентометров/магнитометров 1312. В одном варианте реализации изобретения дискретизатор выборки 1314 может содержать аналого-цифровые преобразователи, преобразующие сигналы, полученные от массива градиентометров/магнитометров 1312 в цифровые сигналы, которые могут обрабатываться процессором системы датчиков 1316.
Датчик ориентации 1320 может содержать любое количество акселерометров, нивелиров, компасов, гироскопов, датчиков скорости вращения, датчиков начального положения и других датчиков для определения ориентации системы датчиков 1310, включая дополнительные части бурильной колонны.
Приемопередатчик малого радиуса действия 1318 может быть выполнен с возможностью взаимодействия с компоновкой низа бурильной колонны посредством проводного или беспроводного соединения. Приемопередатчик малого радиуса действия 1318 обменивается данными с приемопередатчиком малого радиуса действия 1340. Данные могут быть необработанными данными или обработанными данными на основе конфигурации системы датчиков 1310. В одном варианте реализации изобретения данные обрабатываются таким образом, чтобы контроллер управления направлением бурения 1336 на основе данных мог выполнить автоматическую корректировку направления, скорости и ориентации системы датчиков (включая, долото или фрезу).
Инструмент для каротажа во время бурения (КВБ) 1334 может содержать любое количество компонентов, обычно используемых в скважине. Система телеметрии большого радиуса действия 1332 может быть выполнена с возможностью взаимодействия с приемником данных 1359 системы, расположенной на поверхности 1350 и нисходящим каналом передачи данных 1358. Связь может осуществляться с помощью проводных систем, бурильной колонны, беспроводной связи, акустической связи, магнитной связи или с использованием любой другой системы связи, выполненной с возможностью связи с компоновкой низа бурильной колонны 1330 при расположении в скважине. В другом варианте реализации изобретения приемник данных 1359 и нисходящий канал передачи данных 1358 могут являться отдельным трансивером.
Датчики ориентации 1338 выполнены с возможностью точного определения направления, ориентации и положения компоновки низа бурильной 1330. Контроллер управления направлением бурения 1336 является одним или более скважинными инструментами для управления направлением бурильной колонны, включая компоновку низа бурильной колонны 1330 и систему датчиков 1310 с соответствующим буровым долотом. Например, контроллер управления направлением бурения 1336 может быть инструментом для наклонно-направленного бурения роторным способом для наклонно-направленного бурения и скважинных исследований. Контроллер управления направлением бурения 1336 может быть выполнен с возможностью поворота, сгиба, активации или изменения иным способом направлений, положений и ориентации. Контроллер управления направлением бурения 1336 может функционировать автоматически или на основе команд оператора, полученных от компьютера, расположенного на поверхности 1352, контроллера ориентации, расположенного на поверхности 1360 или устройств, соединенных с возможностью передачи данных с компьютером, расположенным на поверхности 1352, посредством цифровой сети 1362.
Компьютер, расположенный на поверхности 1352, может являться одним или более сетевыми вычислительными и коммуникационными устройствами. Система, расположенная на поверхности 1350, компоновка низа бурильной колонны 1330, и система датчиков 1310 выполнены с возможностью выполнения определенных наборов команд, программ, алгоритмов управления направлением бурения или избегания, и т.д. В других вариантах реализации изобретения для реализации описанных процессов могут использоваться процессоры, программируемая логика, или аппаратные средства.
Видеомонитором 1354 может быть монитор, телевизор, планшетное вычислительное устройство, смарт-стекло, прибор для проекции на лобовое стекло или другие визуальные устройства отображения. Вместе с буровой системой 1300 также могут использоваться любые другие периферийные устройства. Память 1356 (а также другие виды памяти буровой установки 1300) могут использоваться для временного или постоянного хранения. Например, память 1356 может содержать одну или более баз данных для хранения данных, получаемых от системы датчиков 1310 для использования различными устройствами и компонентами буровой установки 1300, а также для последующей записи и моделирования.
Контроллер ориентации, расположенный на поверхности 1360 может быть представлен любым количеством контроллеров для управления всей или частью системы, расположенной на поверхности 1350, компоновкой низа бурильной колонны 1330 и системой датчиков 1310. Например, контроллер ориентации, расположенный на поверхности 1360 может использоваться для управления забойным двигателем. Цифровая сеть 1362 может включать любое число проводных, беспроводных, частных, общественных или других сетей. Любое количество подключенных систем, устройств или оборудования может обмениваться данными с буровой установкой 1300 по цифровой сети 1362.
В дополнение к описанным выше вариантам реализации изобретения существует множество примеров конкретных комбинаций в пределах объема изобретения, некоторые из которых перечислены ниже.
Пример 1. Устройство для бурения, содержащее буровое долото; контроллер управления направлением бурения, который направляет буровое долото; скважинную систему управления направлением бурения, соединенную с буровым долотом и содержащую контроллер управления направлением бурения; систему датчиков магнитного сопротивления, содержащую по меньшей мере один датчик и два или более магнитов, установленных для создания выталкивающего эффекта; и компьютер, расположенный на поверхности, соединенный с возможностью передачи данных по меньшей мере с одним датчиком и контроллером управления направлением бурения, причем компьютер, расположенный на поверхности, содержит набор команд, которые при их выполнении компьютером, расположенным на поверхности, побуждают компьютер, расположенный на поверхности, выполнить прием результатов измерений магнитного потока от датчика, определение расстояния или направления на целевой объект, частично на основании измерения магнитного потока; и передачу измеренного расстояния или направления контроллеру управления направлением бурения.
Пример 2. Устройство для бурения в соответствии с примером 1, отличающееся тем, что долото является фрезерным долотом.
Пример 3. Устройство для бурения в соответствии с примером 1 или 2, отличающееся тем, что система датчиков магнитного сопротивления выполнена как единое целое с буровым долотом.
Пример 4. Устройство для бурения в соответствии с примером 1, 2 или 3, отличающееся тем, что компьютер, расположенный на поверхности, определяет азимутальный профиль, связанный с изменениями магнитного потока, для определения направления бурового долота относительно целевого объекта.
Пример 5. Устройство для бурения в соответствии с примером 1, 2, 3 или 4, отличающееся тем, что два или более магнитов создают выталкивающий эффект для распространения магнитного поля в радиальном направлении от продольной оси устройства для бурения.
Пример 6. Устройство для бурения в соответствии с примером 1, 2, 3, 4 или 5, отличающееся тем, что два или магниты соединены с исполнительными приводами для позиционирования двух или магнитов, связанных друг с другом в ответ на команды от компьютера, находящегося на поверхности.
Пример 7. Устройство для бурения в соответствии с примером 1, 2, 3, 4, 5 или 6, отличающееся тем, что система датчиков магнитного сопротивления содержит корпус датчика магнитного сопротивления, выполненный из немагнитного материала.
Пример 8. Устройство для бурения в соответствии с примером 1, 2, 3, 4, 5, 6 или 7, отличающееся тем, что система датчиков магнитного сопротивления содержит массив градиентометров для обнаружения изменений магнитного потока.
Пример 9. Устройство для бурения в соответствии с примером 1, 2, 3, 4, 5, 6, 7 или 8, отличающееся тем, что изменение магнитного потока используется контроллером управления направлением бурения для направления бурового долота в сторону целевого объекта для автоматически управляемого пересечения стволов скважин.
Пример 10. Система датчиков, содержащая множество магнитов, установленных для создания магнитного поля с выталкивающим эффектом: множество магнитометров; главный контроллер магнитного поля, соединенный с возможностью передачи данных с множеством магнитометров, причем главный контроллер магнитного поля содержит набор команд для приема результатов измерений от магнитометров, соответствующих изменениям магнитного сопротивления магнитного потока магнитного поля, создаваемого множеством магнетиков, и определение расстояния или направления на целевой объект на основе результатов измерений магнитного потока; и приемопередатчик для передачи данных на расстоянии.
Пример 11. Система датчиков в соответствии с примером 10, дополнительно содержащая один или более датчиков ориентации для определения ориентации системы датчиков.
Пример 12. Система датчиков в соответствии с примером 10 или 11, отличающаяся тем, что система датчиков вращается вместе с присоединенным буровым долотом.
Пример 13. Система датчиков в соответствии с примером 10, 11 или 12, отличающаяся тем, что система датчиков обменивается данными с компоновкой низа бурильной колонны, содержащей контроллер управления направлением бурения для направления бурового долота.
Пример 14. Система датчиков в соответствии с примером 10, 11, 12 или 13, отличающаяся тем, что главный контроллер магнитного поля определяет азимутальный профиль, связанный с изменениями магнитного сопротивления магнитного поля для определения направления на целевой объект.
Пример 15. Способ направления бурового долота в скважинном приборе, причем способ включает создание магнитного поля с использованием двух или более постоянных магнитов системы датчиков магнитного сопротивления, причем одноименные полюса двух или более постоянных магнитов расположены один напротив другого для создания выталкивающего эффекта; измерение изменений магнитного потока с использованием системы датчиков магнитного сопротивления; определение приближения к целевому объекту в ответ на изменения магнитного потока; и
Пример 16. Способ в соответствии с примером 15, дополнительно включающий: определение направления и ориентации бурового долота.
Пример 17. Способ в соответствии с примером 15 или 16, отличающийся тем, что определение выполняется с использованием диаграммы в полярных координатах, связанной с изменениями магнитного потока.
Пример 18. Способ в соответствии с примером 15, 16 или 17, отличающийся тем, что система датчиков магнитного сопротивления выполнена как единое целое с буровым долотом.
Пример 19. Способ в соответствии с примером 15, 16, 17 или 18, дополнительно включающий использование выталкивающего эффекта для распространения магнитного поля в радиальном направлении от продольной оси системы датчиков.
Пример 20. Способ в соответствии с примером 15, 16, 17, 18 или 19, отличающийся тем, что направление дополнительно включает: пересечение целевого объекта с использованием изменений магнитного потока.
В предыдущих вариантах реализации изобретения делается ссылка на сопровождающие графические материалы, которые являются частью данной заявки. Эти варианты реализации изобретения описываются достаточно подробно для того, чтобы позволить специалистам в данной области техники реализовать изобретение на практике, и подразумевается, что могут использоваться другие варианты реализации и могут быть сделаны логические, структурные, механические, электрические и химические изменения в пределах объема изобретения. Во избежание необязательных подробностей для того, чтобы позволить специалистам в данной области техники реализовать на практике описанные в данной заявке варианты реализации изобретения в описании могут быть опущены некоторые сведения, известные специалистам в данной области техники. Следовательно, подробное описание не носит ограничительный характер, а объем иллюстративных вариантов реализации изобретения определяется только прилагаемой формулой изобретения.
На графических материалах и в описании, которые входят в данную заявку, чертежи не обязательно выполнены в масштабе. Некоторые признаки изобретения могут быть преувеличены в размерах или представлены в несколько схематичном виде, а некоторые детали обычных элементов для ясности и краткости изложения могут быть опущены.
Предыдущее подробное описание является небольшим количеством вариантов реализации изобретения и не предназначено для ограничения объема изобретения. В последующей формуле изобретения приводится ряд вариантов реализации изобретения, описанных более конкретно.
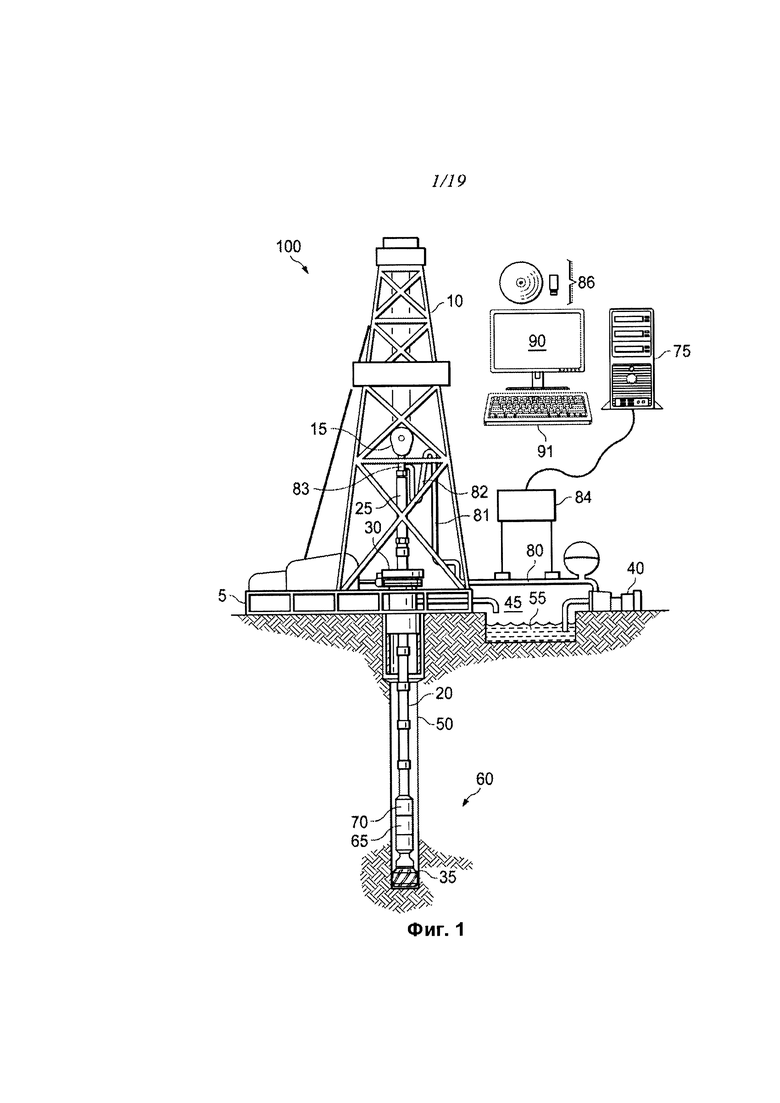
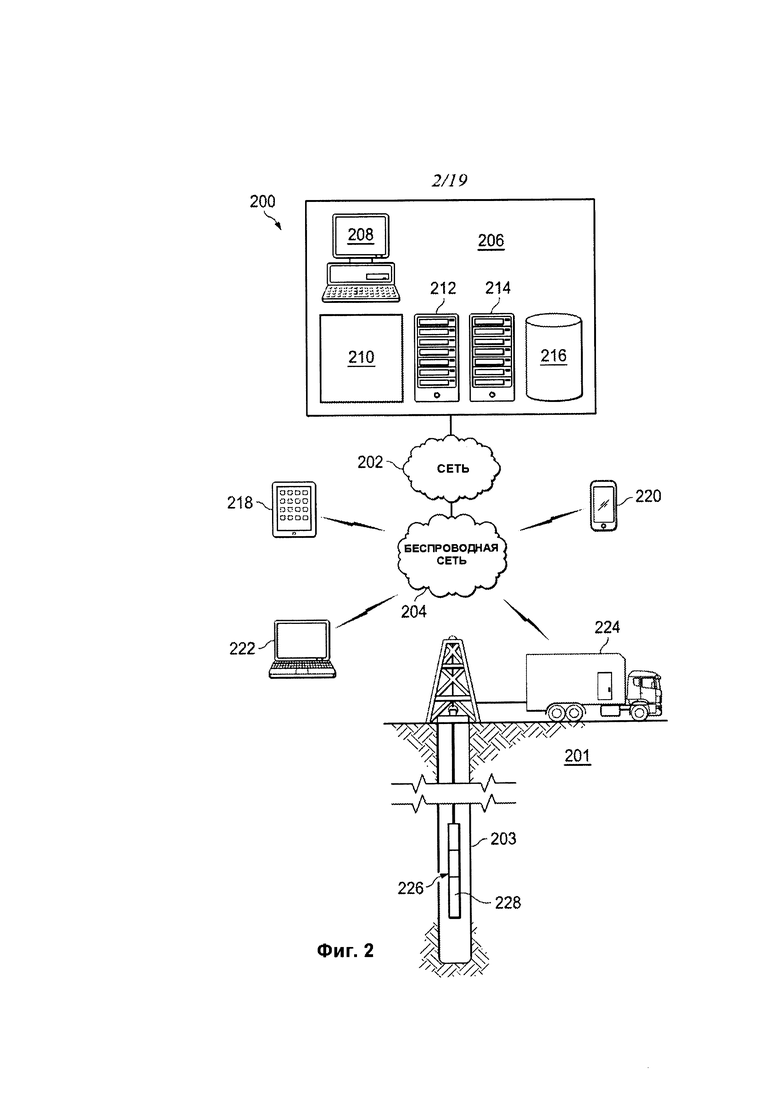
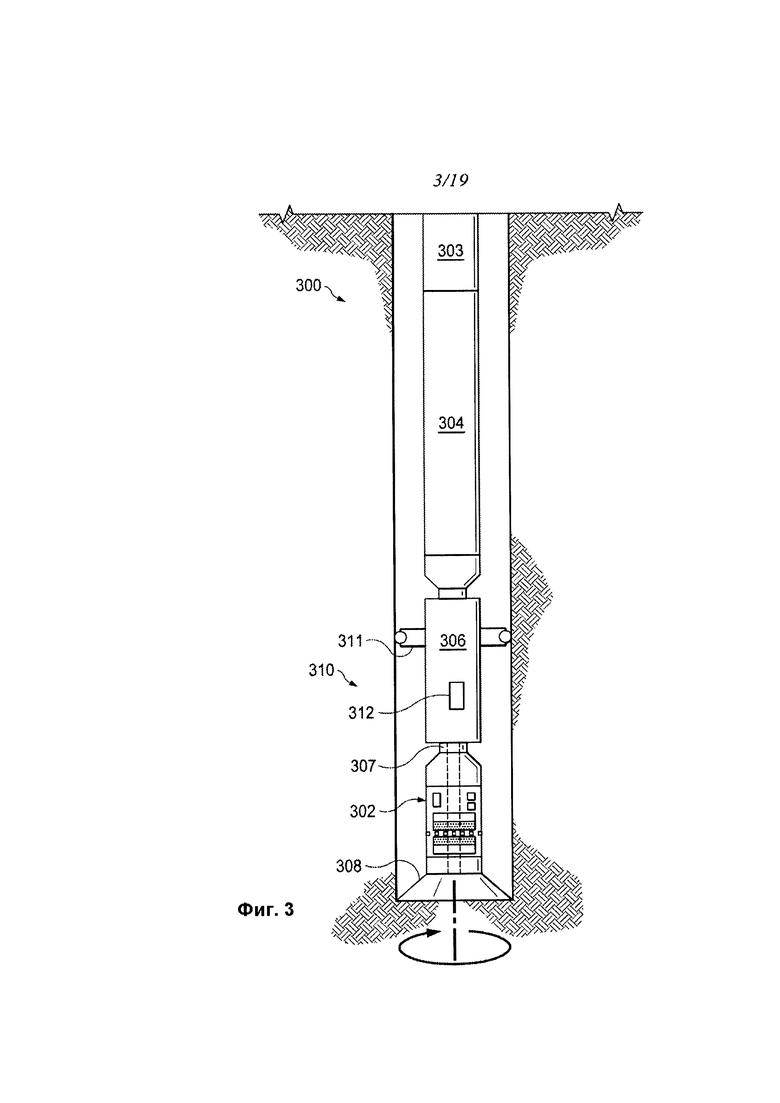
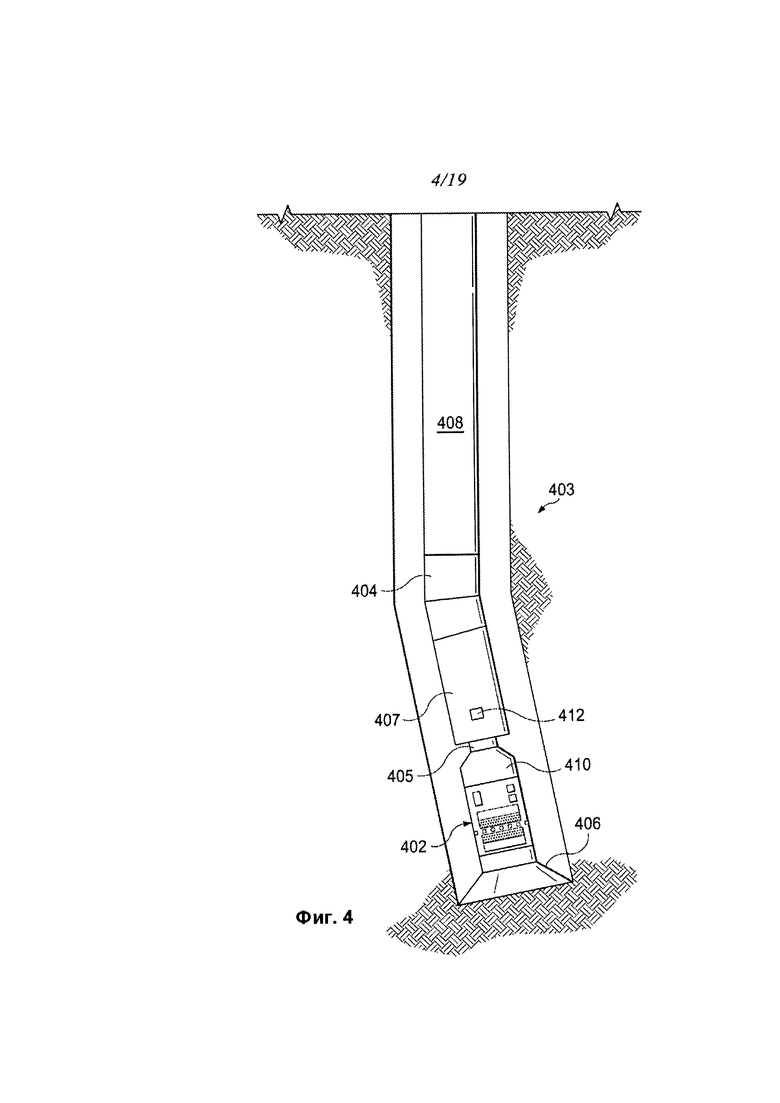
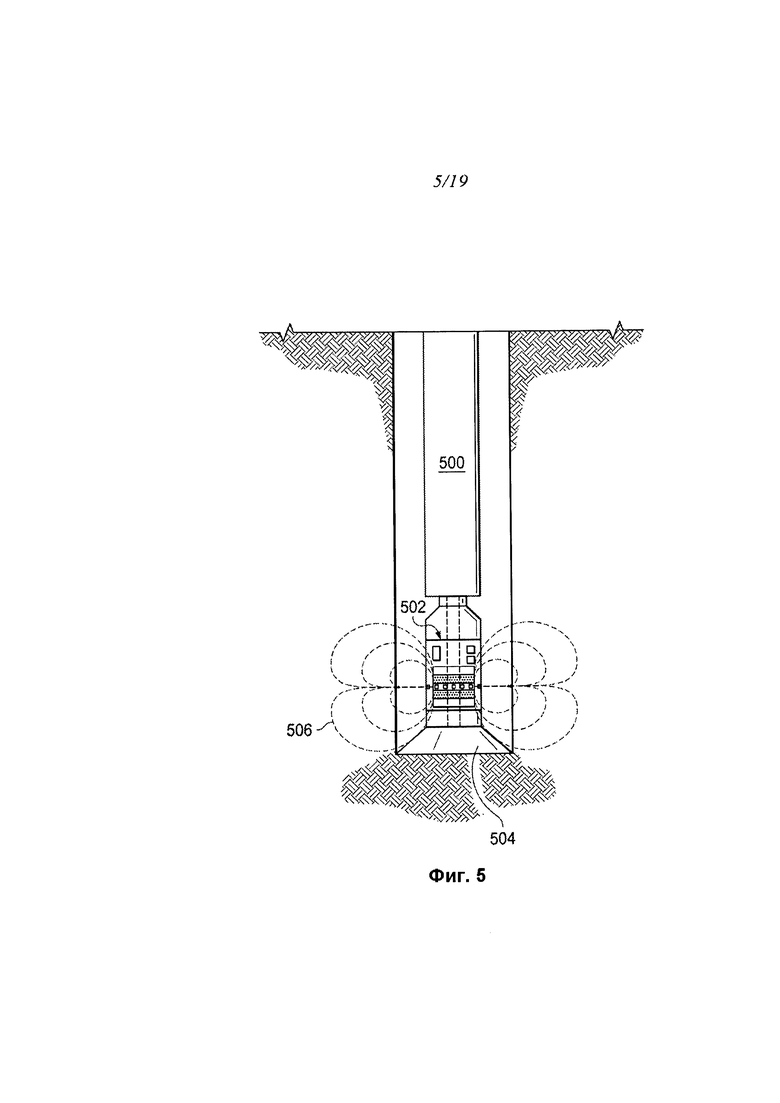
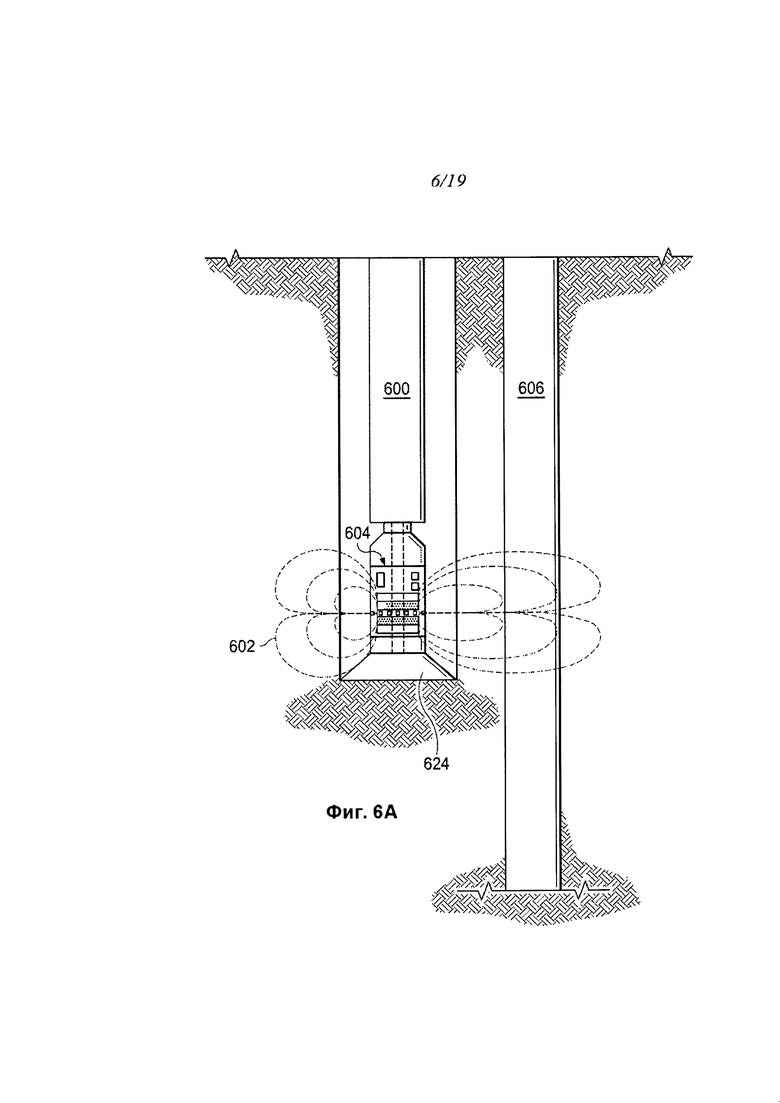
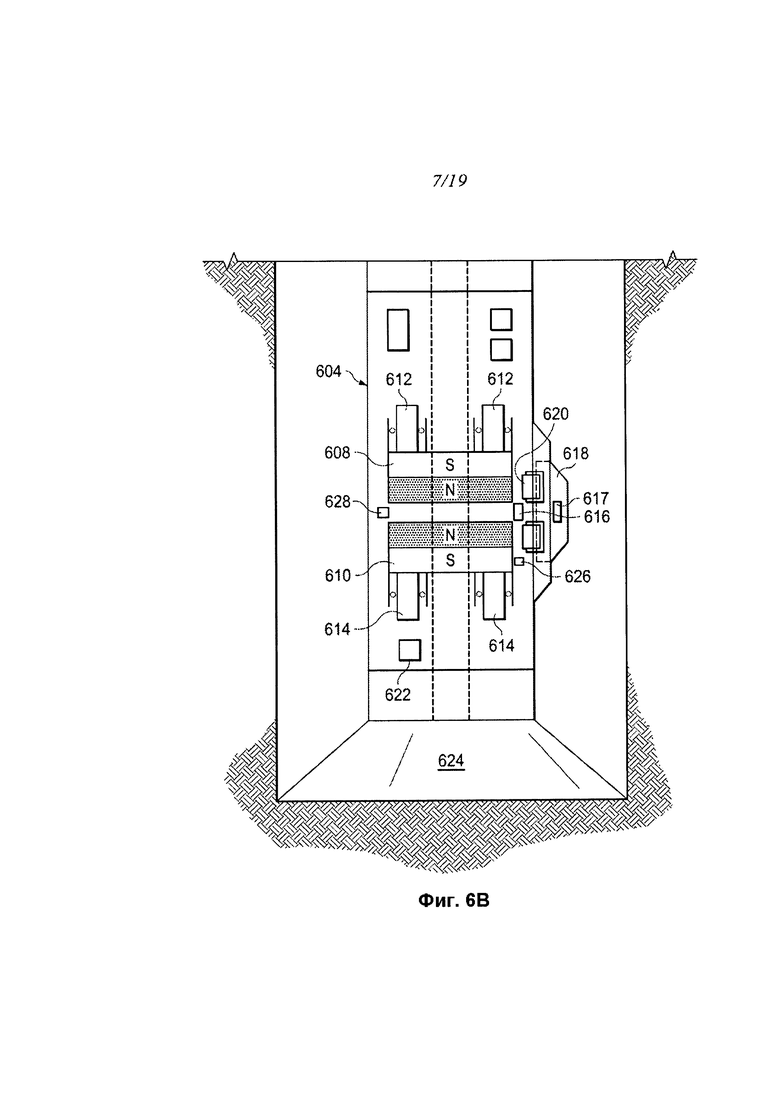
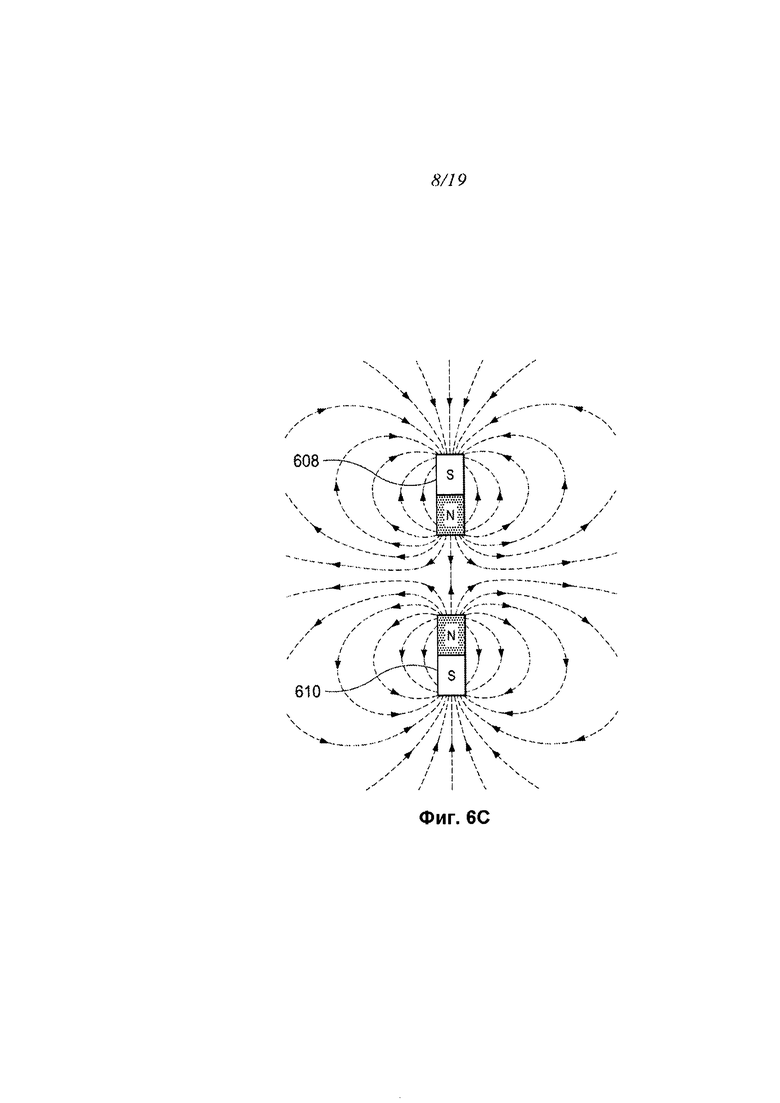
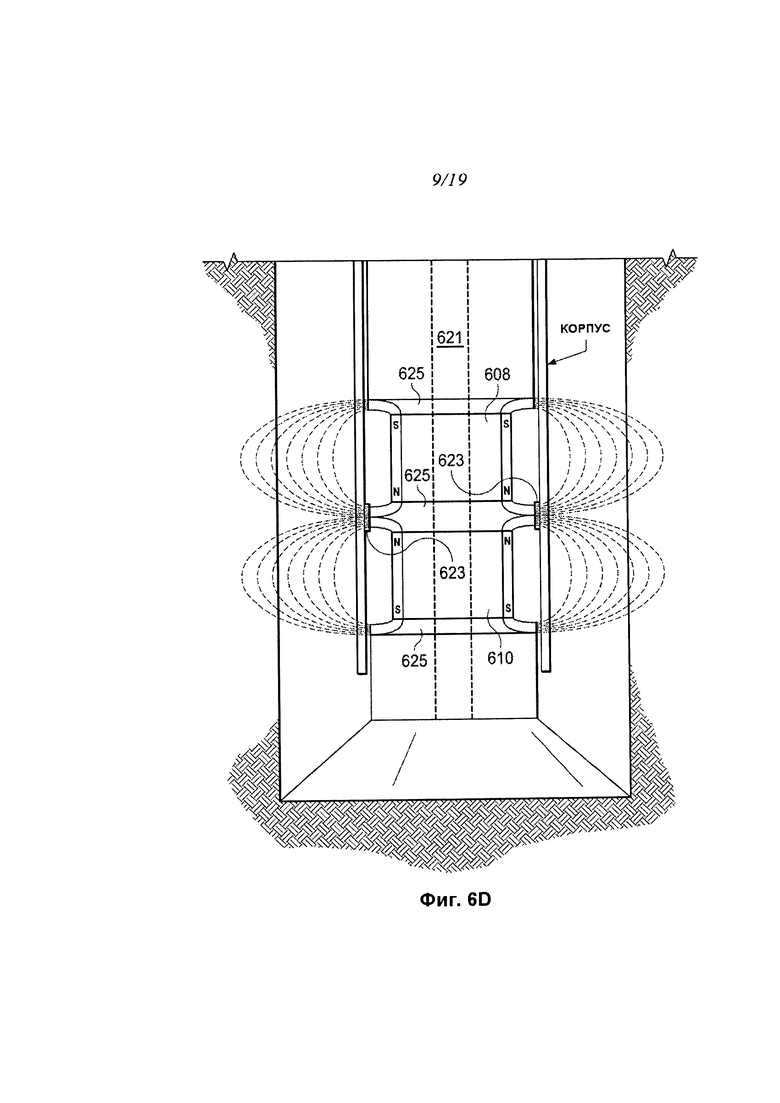
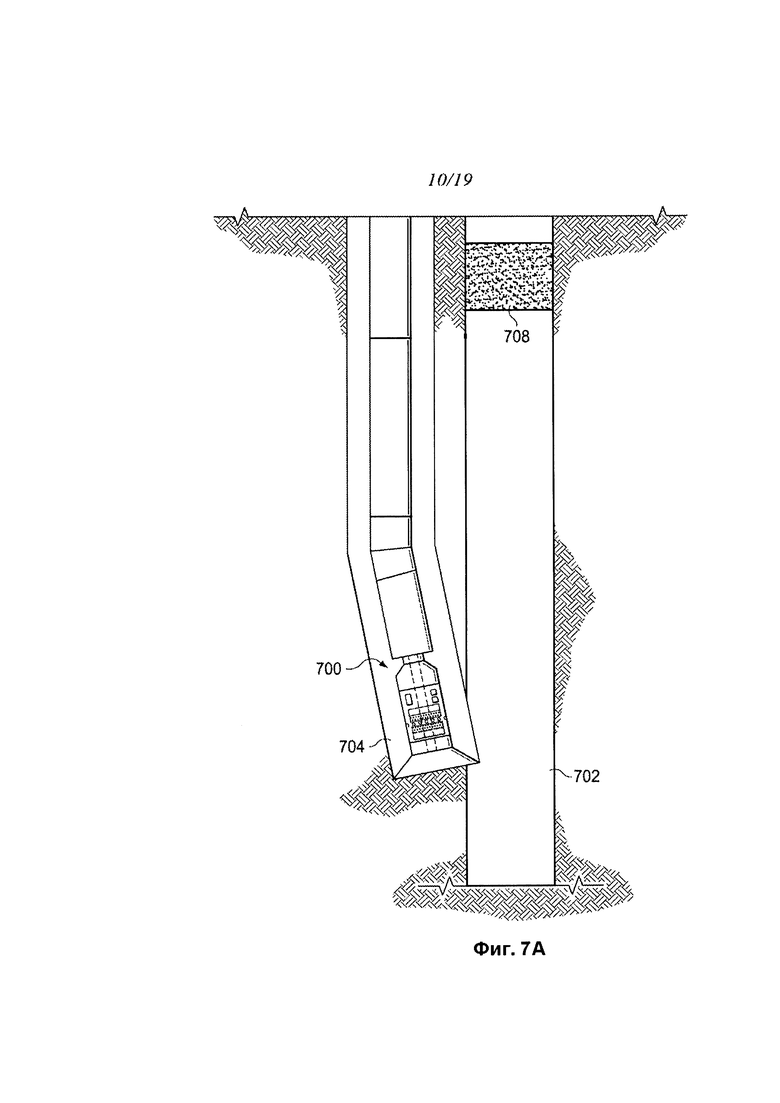
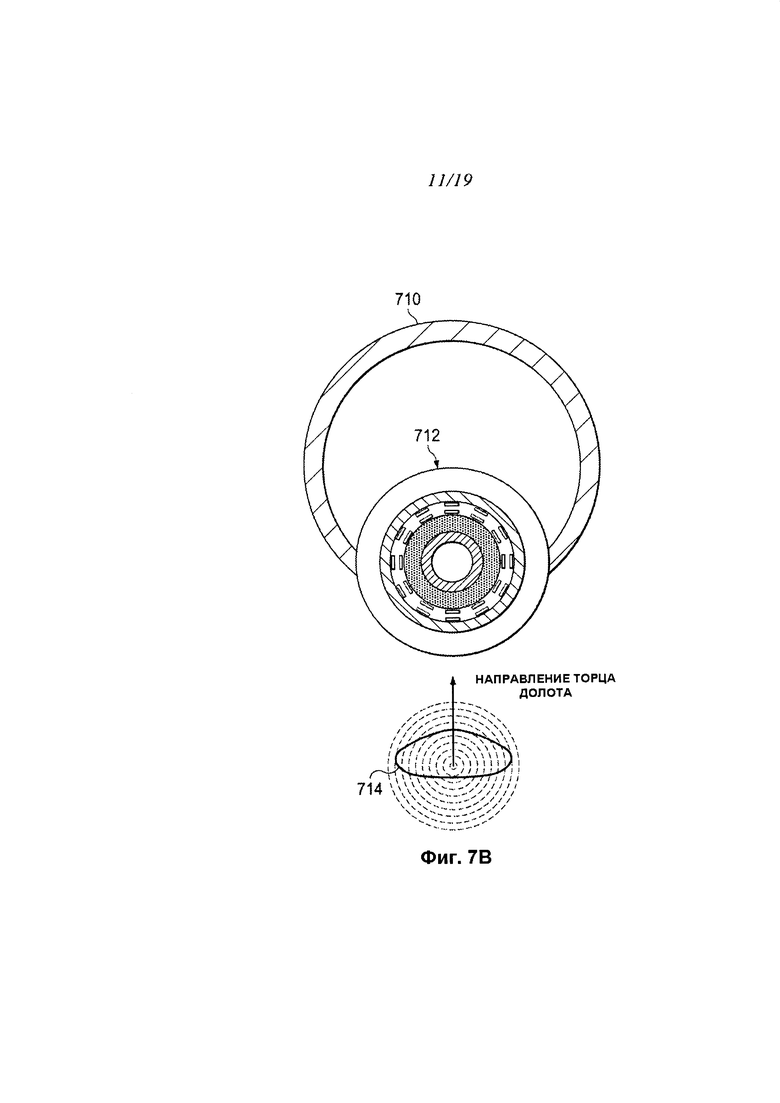
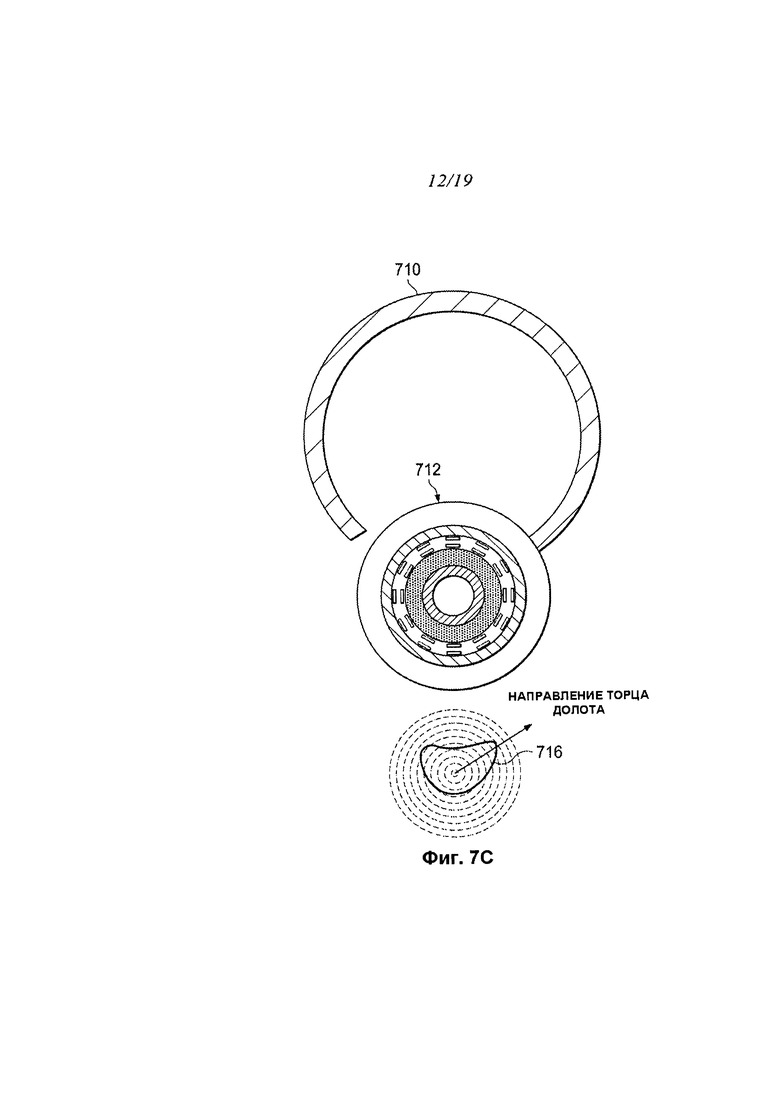
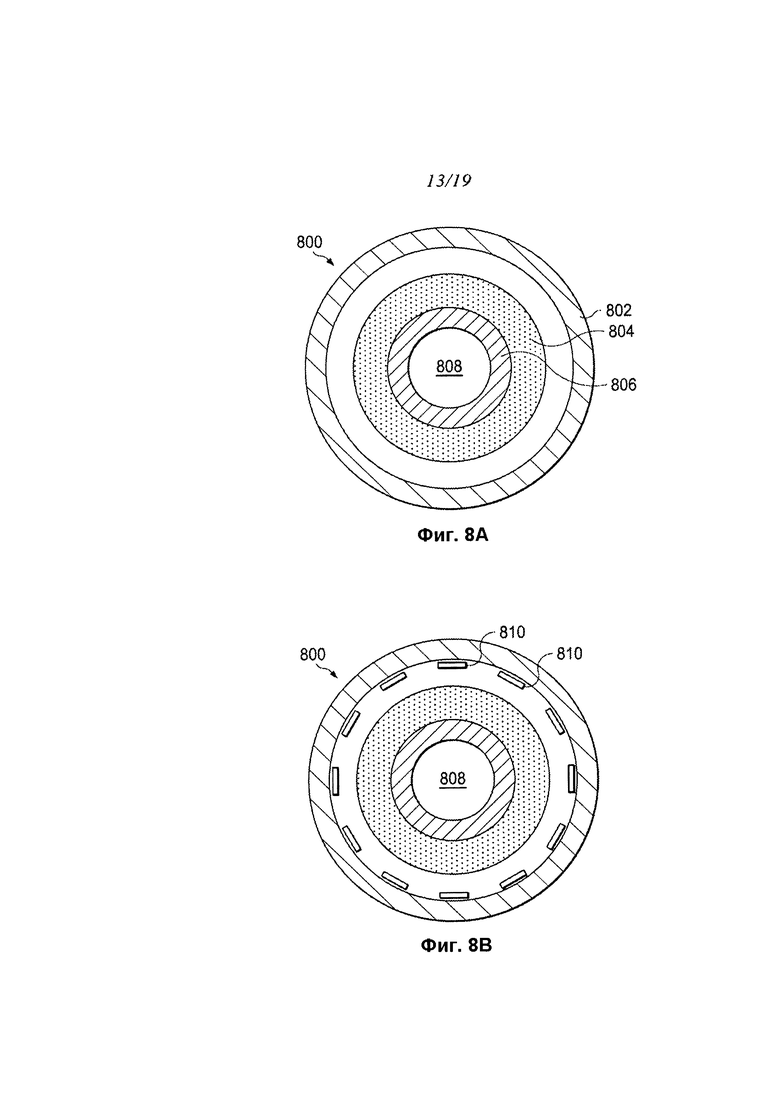
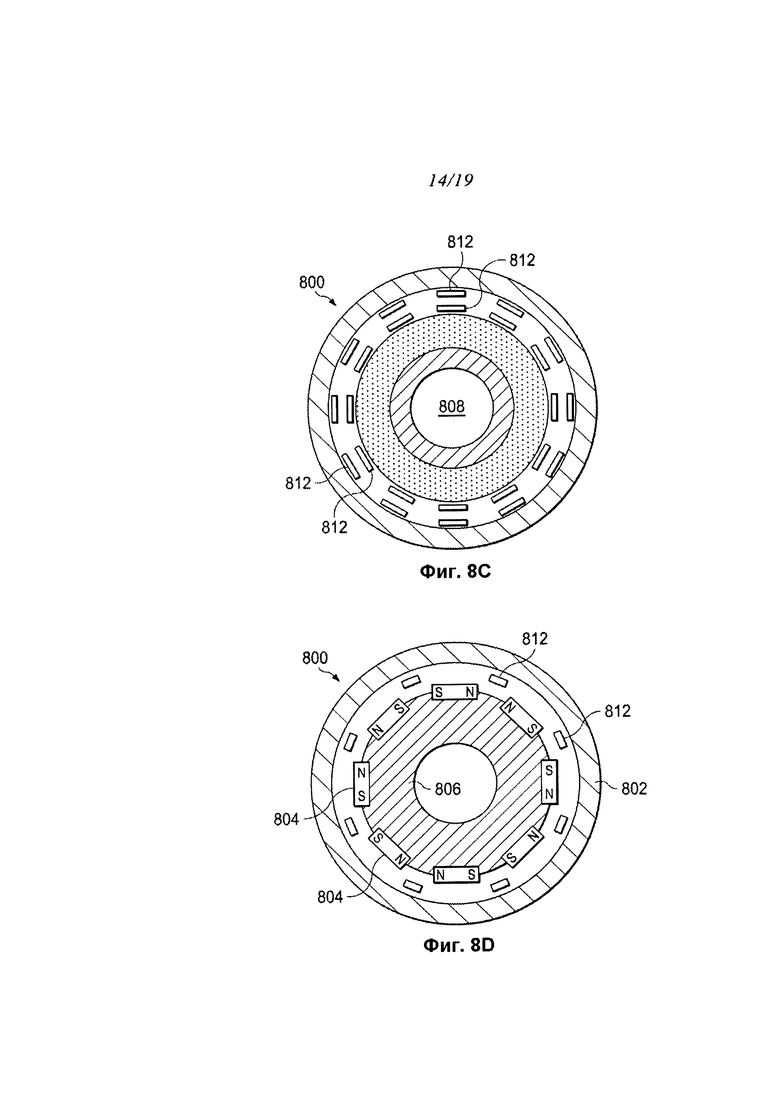
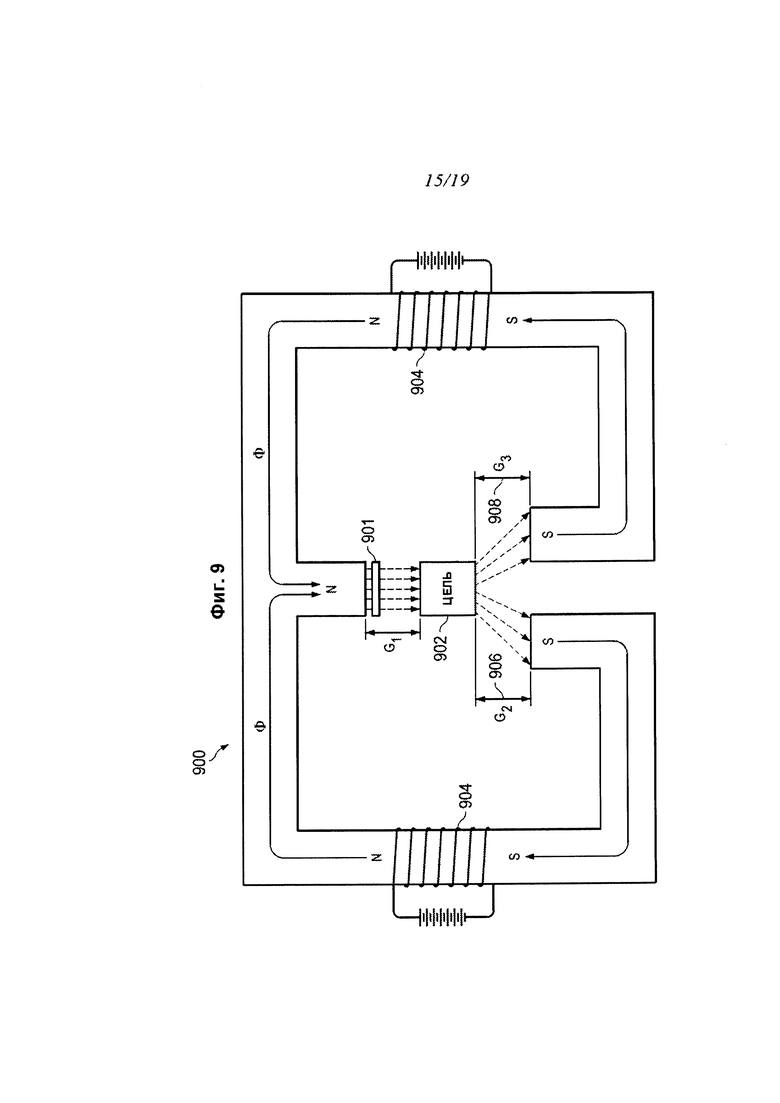
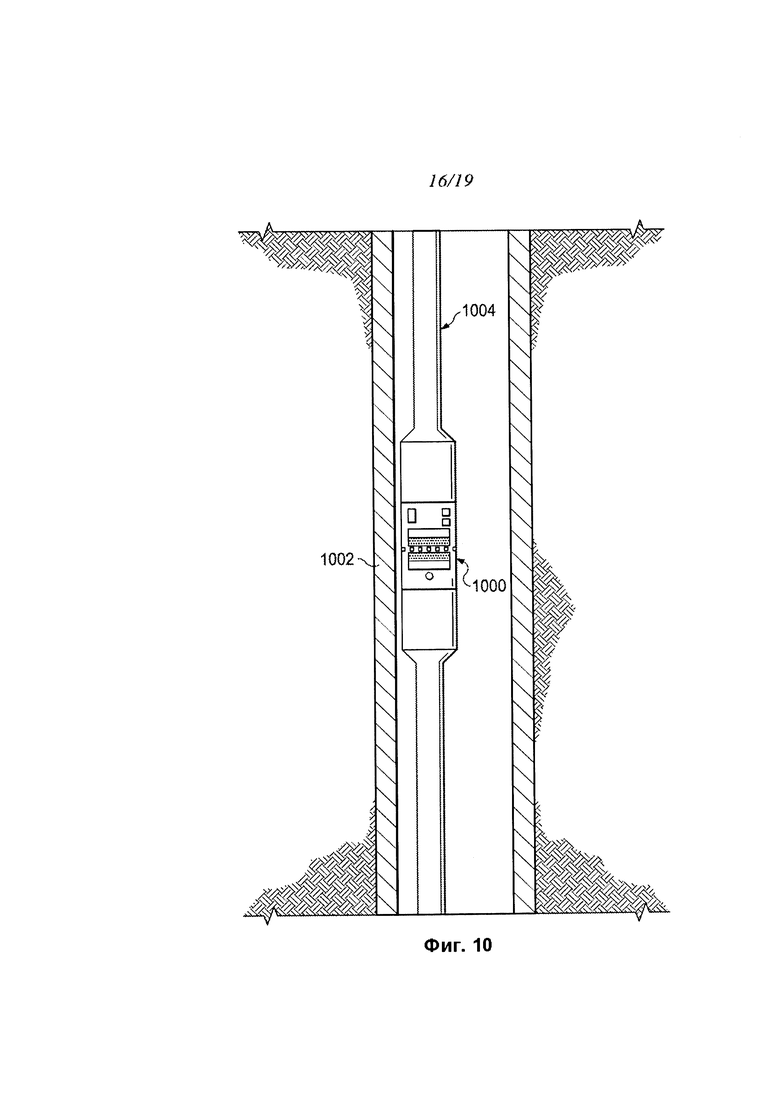
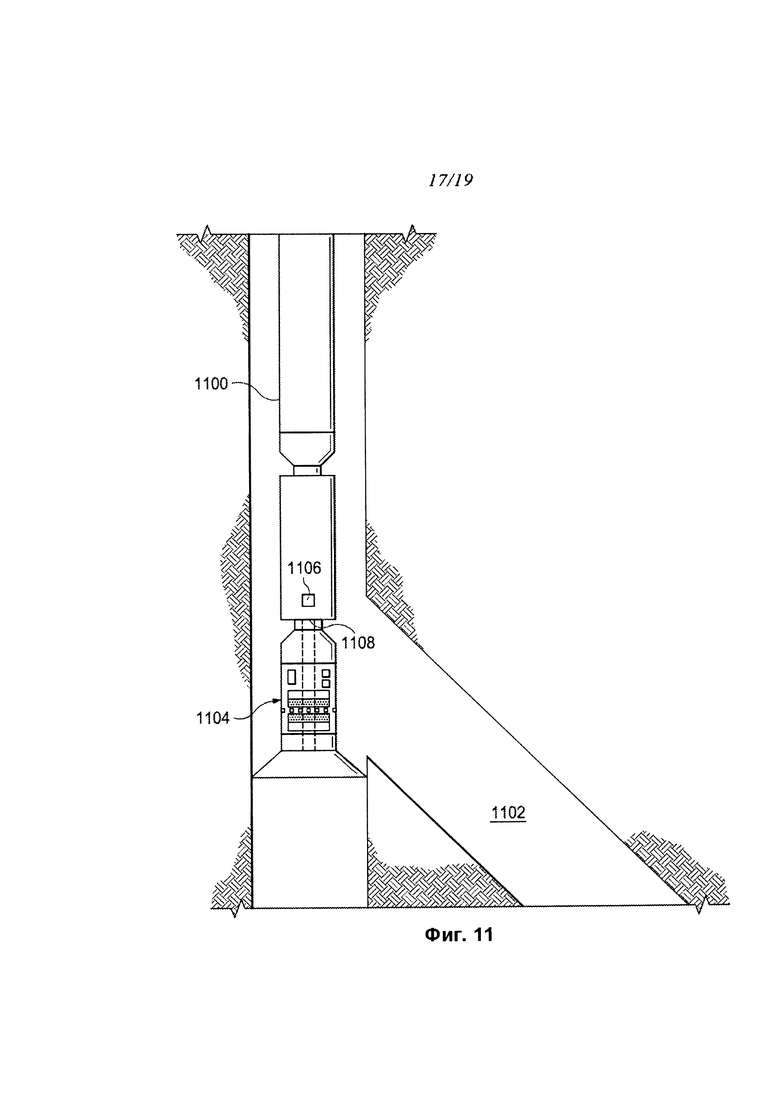
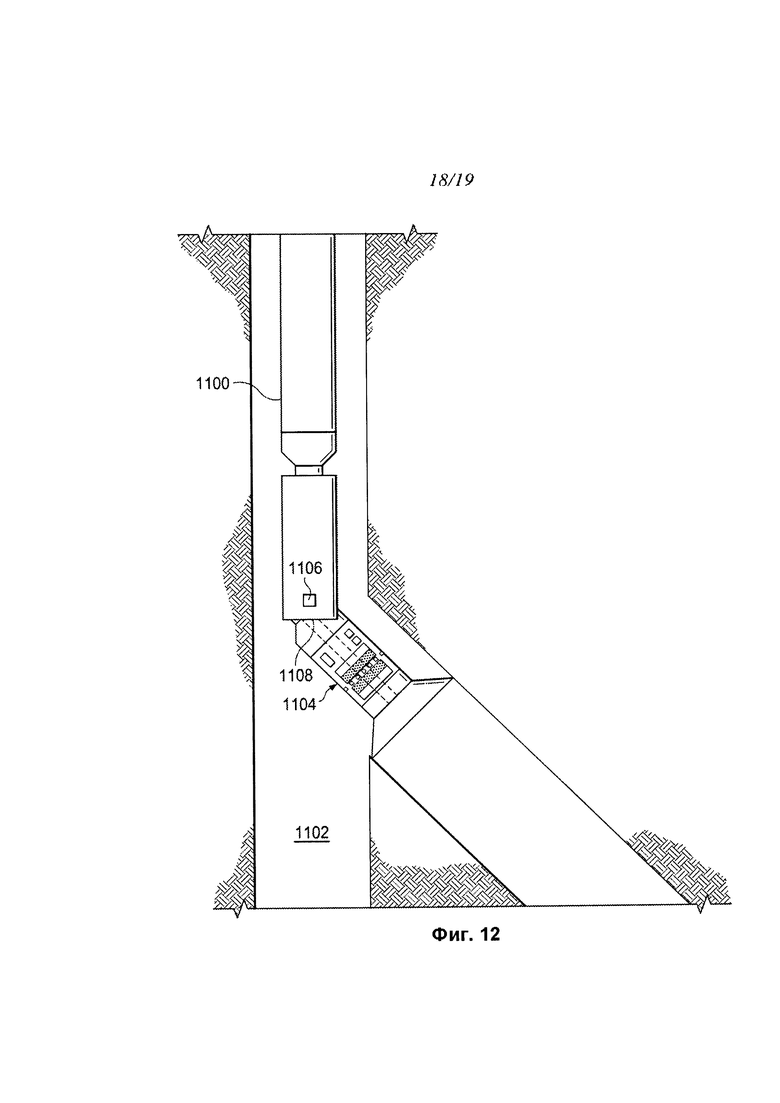
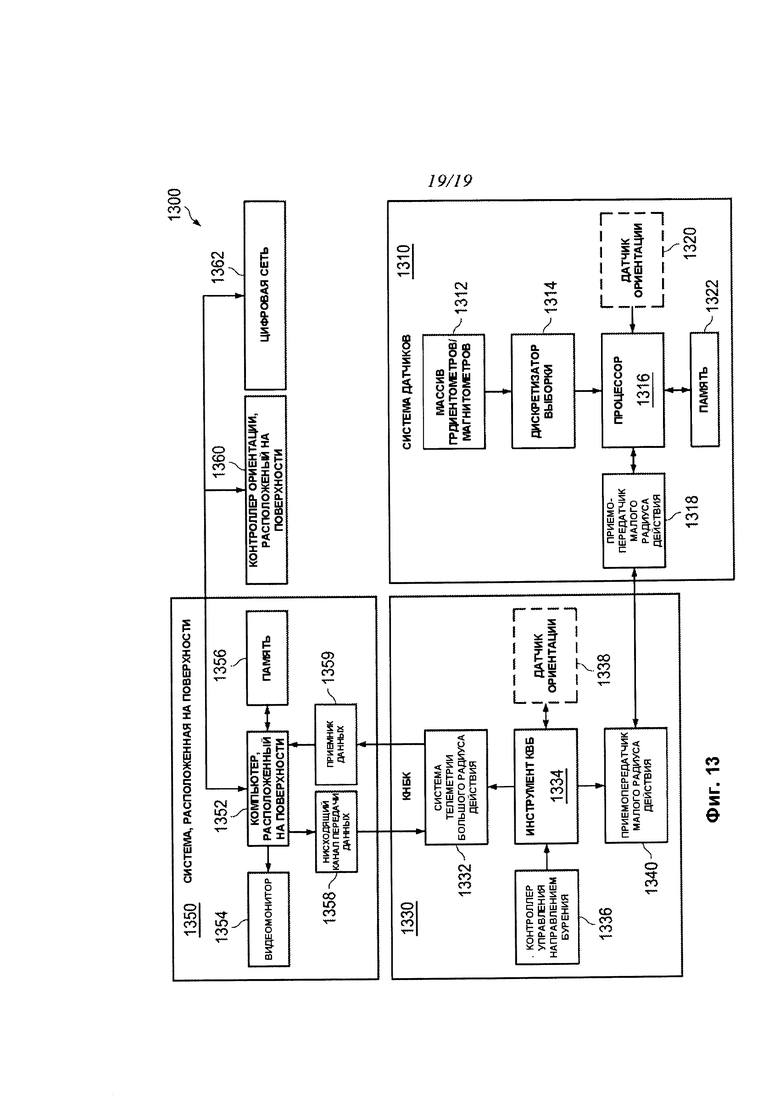
Изобретение относится к бурению скважин и может быть использовано для обнаружения намагничиваемой конструкции в подземной среде. Техническим результатом является увеличение чувствительности системы датчиков за счет максимизации выталкивающего магнитного поля в радиальном направлении от системы датчиков. В частности, предложено устройство для бурения, содержащее буровое долото, скважинную систему управления направлением бурения, соединенную с буровым долотом и содержащую контроллер управления направлением бурения, систему датчиков магнитного сопротивления, содержащую по меньшей мере один датчик и два или более магнитов, установленных для создания выталкивающего эффекта, компьютер, расположенный на поверхности, соединенный с возможностью передачи данных по меньшей мере с одним датчиком и контроллером управления направлением бурения. Причем по меньшей мере один датчик выровнен в продольном направлении по центру между двумя или более магнитами и радиально ориентирован для обнаружения максимального выталкивающего поля в радиальном направлении от системы датчиков. Компьютер, расположенный на поверхности, содержит набор команд, которые при их выполнении компьютером, расположенным на поверхности, побуждают компьютер, расположенный на поверхности, выполнить прием результатов измерений магнитного потока от датчика, определение расстояния или направления на целевой объект, частично на основании измерения магнитного потока; и передачу измеренного расстояния или направления контроллеру управления направлением бурения. 3 н. и 17 з.п. ф-лы, 21 ил.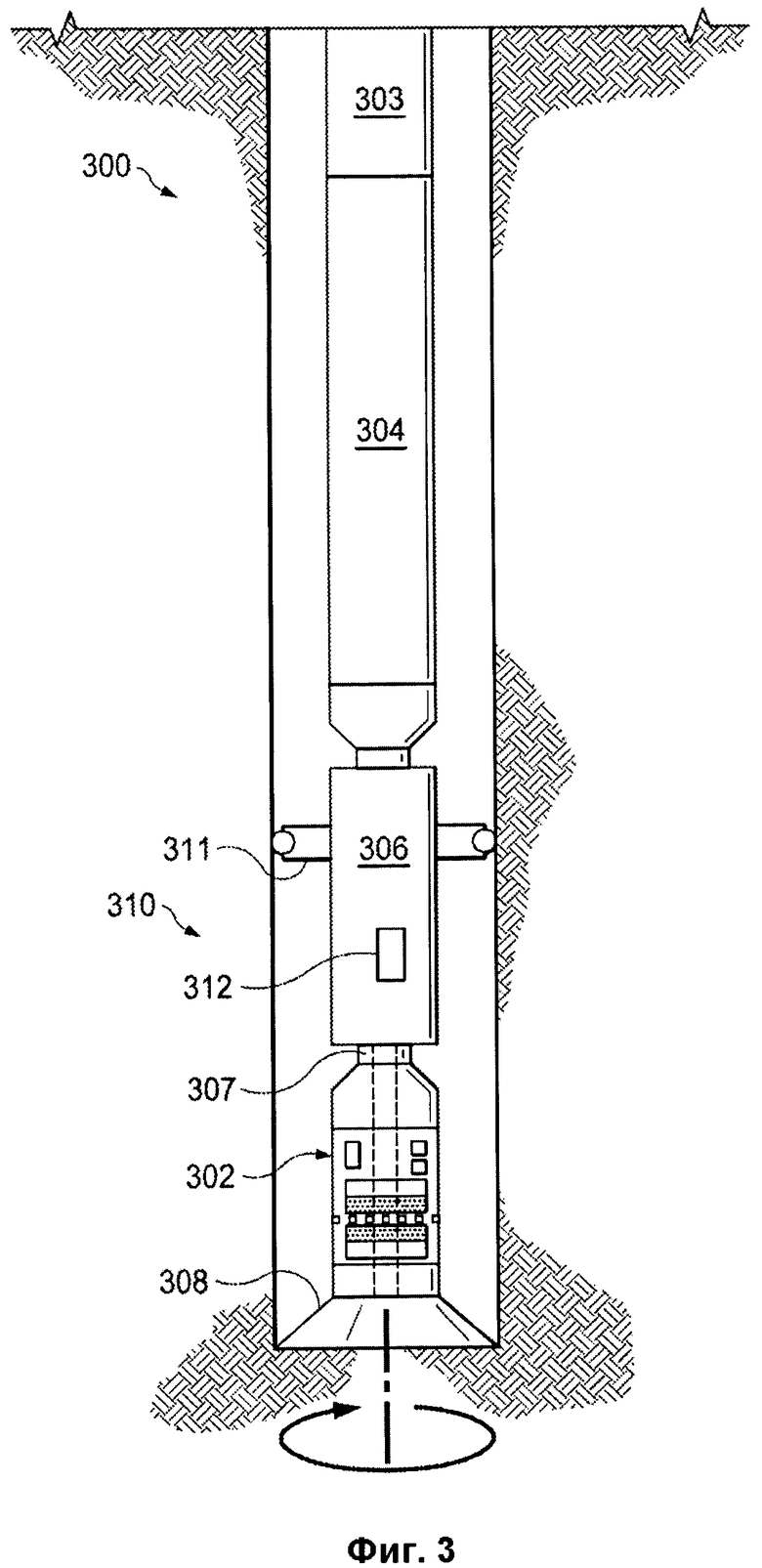
1. Устройство для бурения, содержащее:
буровое долото;
скважинную систему управления направлением бурения, соединенную с буровым долотом и содержащую контроллер управления направлением бурения;
систему датчиков магнитного сопротивления, содержащую по меньшей мере один датчик и два или более магнитов, установленных для создания выталкивающего эффекта, причем по меньшей мере один датчик выровнен в продольном направлении по центру между двумя или более магнитами и радиально ориентирован для обнаружения максимального выталкивающего поля в радиальном направлении от системы датчиков; и
компьютер, расположенный на поверхности, соединенный с возможностью передачи данных по меньшей мере с одним датчиком и контроллером управления направлением бурения, причем компьютер, расположенный на поверхности, содержит набор команд, которые при их выполнении компьютером, расположенным на поверхности, побуждают компьютер, расположенный на поверхности, выполнить прием результатов измерений магнитного потока от датчика, определение расстояния или направления на целевой объект, частично на основании измерения магнитного потока; и передачу измеренного расстояния или направления контроллеру управления направлением бурения.
2. Устройство для бурения по п. 1, отличающееся тем, что долото является фрезерным долотом.
3. Устройство для бурения по п. 1, отличающееся тем, что система датчиков магнитного сопротивления выполнена как единое целое с буровым долотом.
4. Устройство для бурения по п. 1, отличающееся тем, что компьютер, расположенный на поверхности, определяет азимутальный профиль, связанный с изменениями магнитного потока, для определения направления бурового долота относительно целевого объекта.
5. Устройство для бурения по п. 1, отличающееся тем, что два или более магнитов соединены с исполнительными приводами для позиционирования двух или более магнитов, связанных друг с другом, в ответ на команды от компьютера, находящегося на поверхности.
6. Устройство для бурения по п. 1, отличающееся тем, что система датчиков магнитного сопротивления содержит массив магнитометров, причем система датчиков магнитного сопротивления используется при вращении бурового долота.
7. Устройство для бурения по п. 1, отличающееся тем, что система датчиков магнитного сопротивления содержит корпус системы датчиков магнитного сопротивления, выполненный из немагнитного материала.
8. Устройство для бурения по п. 1, отличающееся тем, что система датчиков магнитного сопротивления содержит массив градиентометров для обнаружения изменений магнитного потока.
9. Устройство для бурения по п. 1, отличающееся тем, что изменение магнитного потока используется контроллером управления направлением бурения для направления бурового долота в сторону целевого объекта для автоматически управляемого пересечения стволов скважин.
10. Система датчиков для определения расстояния до намагниченного объекта в подземной среде и/или направления к этому объекту, содержащая:
множество магнитов, установленных для создания магнитного поля с выталкивающим эффектом;
множество магнитометров, причем множество магнитометров выровнены в продольном направлении по центру между множеством магнитов и радиально ориентированы для обнаружения максимального выталкивающего поля в радиальном направлении от системы датчиков;
главный контроллер магнитного поля, соединенный с возможностью передачи данных с множеством магнитометров, причем главный контроллер магнитного поля содержит набор команд для приема результатов измерений от магнитометров, соответствующих изменениям магнитного сопротивления магнитного потока магнитного поля, создаваемого множеством магнитов, и определение расстояния или направления на целевой объект на основе результатов измерений магнитного потока; и
приемопередатчик для передачи данных на расстоянии.
11. Система датчиков по п. 10, дополнительно содержащая:
один или более датчиков ориентации для определения ориентации системы датчиков.
12. Система датчиков по п. 10, отличающаяся тем, что система датчиков вращается вместе с присоединенным буровым долотом.
13. Система датчиков по п. 10, отличающаяся тем, что система датчиков обменивается данными с компоновкой низа бурильной колонны, содержащей контроллер управления направлением бурения для управления буровым долотом.
14. Система датчиков по п. 10, отличающаяся тем, что главный контроллер магнитного поля определяет азимутальный профиль, связанный с изменениями магнитного сопротивления магнитного поля для определения направления на целевой объект.
15. Способ управления бурового долота в скважинном приборе, включающий: создание магнитного поля с использованием двух или более постоянных магнитов системы датчиков магнитного сопротивления, причем одноименные полюса двух или более постоянных магнитов расположены один напротив другого для создания выталкивающего эффекта;
ориентирование по меньшей мере одного датчика системы датчиков магнитного сопротивления в радиальном направлении для обнаружения максимального выталкивающего поля в радиальном направлении от системы датчиков, причем по меньшей мере один датчик выровнен в продольном направлении по центру между двумя или более магнитами;
измерение изменений магнитного потока с использованием системы датчиков магнитного сопротивления;
определение приближения к целевому объекту в ответ на изменения магнитного потока; и
направление бурового долота в ответ на приближение к целевому объекту.
16. Способ по п. 15, дополнительно включающий: определение направления и ориентации бурового долота.
17. Способ по п. 15, отличающийся тем, что определение выполняется с использованием азимутального профиля, связанного с изменениями магнитного потока.
18. Способ по п. 15, отличающийся тем, что система датчиков магнитного сопротивления выполнена как единое целое с буровым долотом.
19. Способ по п. 15, дополнительно включающий использование выталкивающего эффекта для распространения магнитного поля в радиальном направлении от продольной оси системы датчиков магнитного сопротивления.
20. Способ по п. 15, отличающийся тем, что направление дополнительно включает: пересечение целевого объекта с использованием изменений магнитного потока.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| US 5230387 A, 27.07.1993 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| EA 200400234 A1, 26.08.2004 | |||
| УСТРОЙСТВО ИЗМЕРЕНИЯ РАССТОЯНИЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ МЕЖДУ ДВУМЯ БУРОВЫМИ СКВАЖИНАМИ (ВАРИАНТЫ), СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ МЕЖДУ ДВУМЯ БУРОВЫМИ СКВАЖИНАМИ, УЗЕЛ СОЛЕНОИДА УСТРОЙСТВА ИЗМЕРЕНИЯ РАССТОЯНИЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ МЕЖДУ ДВУМЯ БУРОВЫМИ СКВАЖИНАМИ | 2007 |
|
RU2468200C2 |

