УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение в целом относится к операциям бурения скважин, и, в частности, к измерениям дальности с использованием модулированных сигналов.
В частных случаях, например, при выбросе из скважины, может требоваться пересечение первой скважины, именуемой целевой скважиной, второй скважиной, именуемой разгрузочной скважиной. Вторая скважина может быть пробурена с целью пересечения целевой скважины, например, для разгрузки давления в скважине с неуправляемым выбросом. Так как традиционные методы исследования характеризуются конусом неопределенности, намного превышающим размер цели, соединение целевой скважины с разгрузочной скважиной обычно требует проведения множества скважных измерений для идентификации точного расположения целевой скважины. Эти скважинные измерения могут включать передачу изменяющегося во времени сигнала в пласт и измерение любого образованного в результате магнитного поля, индуцированный в целевой скважине. Обычно, изменяющийся во времени сигнал является синусоидой. Однако идентификация точного направления целевой скважины на основе синусоидального сигнала может быть трудной, в связи с изменениями знака результирующего магнитного поля.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Некоторые конкретные приведенные в качестве примера варианты реализации настоящего изобретения будут понятны частично со ссылкой на следующее описание и сопроводительные чертежи.
На фиг. 1 представлена диаграмма, иллюстрирующая приведенную в качестве примера систему измерения дальности в соответствии с аспектами настоящего изобретения.
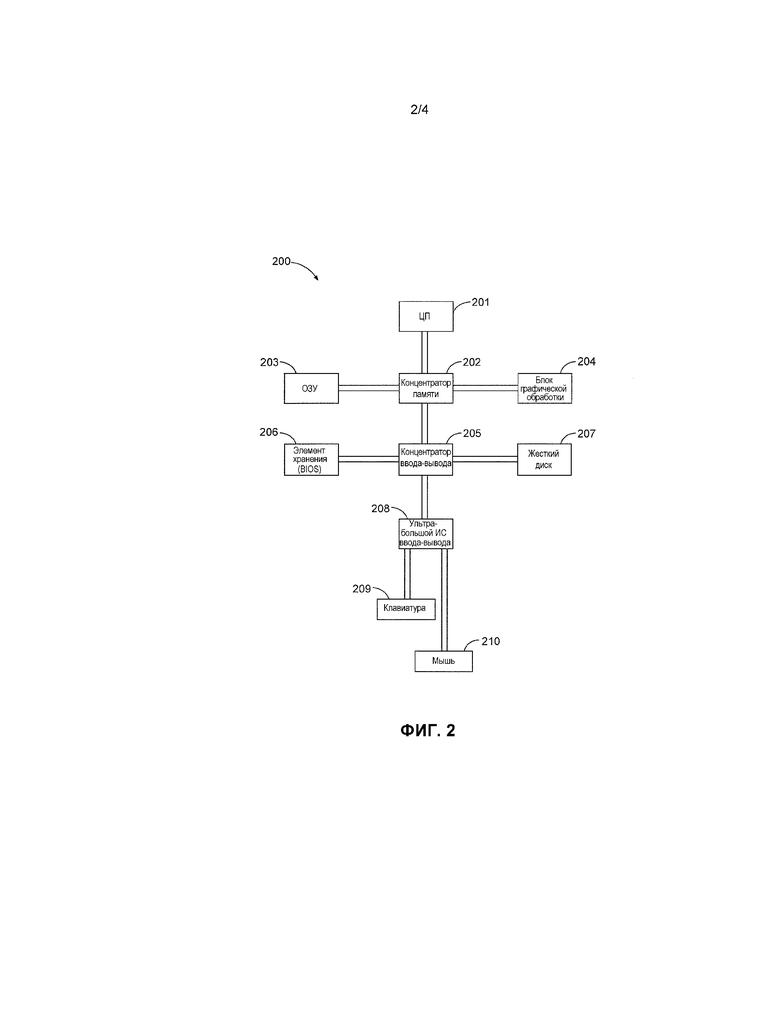
На фиг. 2 представлена диаграмма, иллюстрирующая приведенную в качестве примера систему обработки информации в соответствии с аспектами настоящего изобретения.
На фиг. 3 представлена диаграмма, иллюстрирующая приведенные в качестве примера составляющие градиентных измерений относительно целевой трубы и магнитных полей, образованных токами на трубе.
На фиг. 4 представлен график, иллюстрирующий приведенный в качестве примера асимметричный изменяющийся во времени сигнал в соответствии с аспектами настоящего изобретения.
На фиг. 5 представлен график, иллюстрирующий приведенные в качестве примера скважинные характеристики относительно асимметричного изменяющегося во времени сигнала в соответствии с аспектами настоящего изобретения.
На фиг. 6 представлен график, иллюстрирующий приведенный в качестве примера изменяющийся во времени сигнал в соответствии с аспектами настоящего изобретения.
Несмотря на то, что варианты реализации настоящего изобретения были изображены и описаны, и изложены посредством ссылки на приведенные в качестве примера варианты реализации изобретения, эти ссылки не ограничивают изобретение, и такое ограничение не подразумевается. Раскрываемый объект изобретения допускает значительную модификацию, изменение и эквиваленты по форме и функции, которые придут на ум специалистам в данной области техники и имеют преимущества данного изобретения. Изображенные и описанные варианты реализации настоящего изобретения являются примерами, и не ограничивают объем изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение в целом относится к операциям бурения скважин, и, в частности, к измерениям дальности с использованием модулированных сигналов.
Иллюстративные варианты реализации настоящего изобретения более подробно описаны в настоящем описании. Для ясности, в настоящем описании могут быть описаны не все особенности фактической реализации. Конечно, следует понимать, что в разработке любого такого фактического варианта осуществления, для достижения конкретных целей реализации должны быть выполнены многочисленные реализации конкретных решений, которые будут отличаться от одной реализации к другой. Кроме того, следует иметь в виду, что такая разработка может быть сложной и трудоемкой, но, тем не менее, благодаря этому описанию, быть рутинным делом для среднего специалиста в данной области техники.
Для способствования лучшему пониманию настоящего изобретения приведены следующие примеры частных вариантов реализации. Следующие примеры не следует воспринимать в качестве ограничения или определения объема изобретения. Варианты реализации настоящего изобретения могут быть применимы к операциям бурения, которые без ограничения включают сопровождение цели (например, примыкающей скважины), пересечение цели, установление расположения цели, объединение скважин, например в конструкциях SAGD (гравитационный дренаж с применением пара) скважин, бурение разгрузочных скважин для скважин с неуправляемым выбросом, пересечение рек, строительство туннелей, а также соединение, пересечение, обход (бурение вокруг прихваченный в скважине инструмент на средней глубине и назад в скважину ниже) горизонтальных, вертикальных, отклоненных, многоствольных, U-образных труб, или другие нелинейные стволы скважины в любом типе подземного пласта. Варианты реализации могут быть применимы к нагнетательным скважинам и эксплуатационным скважинам, включая эксплуатационные скважины природных ресурсов, такие как сероводородные, углеводородные или геотермальные скважины; а также строительству стволов скважины для пересекающего реку туннелирования и других таких туннелирований стволов скважин в целях приповерхностного строительства, или стволовых U-образных трубопроводов, используемых для транспортировки таких текучих сред, как углеводородов. Варианты реализации, описанные далее относительно одного применения, не являются ограничивающими.
Современные операции бурения и добычи нефти требуют информации относительно параметров и условий в скважине. Существует несколько способов для сбора скважинной информации, включая каротаж во время бурения («LWD») и измерения во время бурения («MWD»). При каротаже во время бурения, данные обычно собирают во время процесса бурения, таким образом исключая необходимость удаления буровой компоновки для введения кабельного каротажного прибора. Следовательно, каротаж во время бурения обеспечивает возможность оператору, осуществляющему бурение, вносить точные модификации или исправления в режиме реального времени для оптимизации производительности, при этом сводя к минимуму время простоя. Термин «измерения во время бурения» обозначает измерение условий в скважине, относящихся к перемещению и расположению буровой компоновки во время продолжения бурения. Каротаж во время бурения более сосредоточен на измерении параметров пласта. Хотя существуют различия между измерениями во время бурения и каротажем во время бурения, термины измерения во время бурения и каротаж во время бурения часто используют взаимозаменяемо. В настоящем описании термин каротаж во время бурения будет использован с пониманием того, что этот термин включает сбор параметров пласта и сбор информации, относящейся к перемещению и расположению буровой компоновки.
На фиг. 1 представлена диаграмма, иллюстрирующая приведенную в качестве примера систему 100 бурения и измерения дальности в соответствии с аспектами настоящего изобретения. Система 100 содержит буровую вышку 101 на поверхности 105, расположенную над стволом 106 скважины, находящимся в пределах подземного пласта 102. Вышка 101 может быть присоединена к буровой компоновке 107, содержащей бурильную колонну 108 и компоновку 109 низа бурильной колонны (BHA). Компоновка 109 низа бурильной колонны может содержать буровое долото 113 и устройство 111 для измерений во время бурения. В частных вариантах реализации буровая компоновка 107 выполнена с возможностью вращения посредством верхнего приводного механизма (не показан) для вращения бурового долота 113 и продления ствола 106 скважины. В конкретных других вариантах реализации забойный двигатель (не показан), такой как забойный двигатель, может содержаться для вращения бурового долота 113 и продления ствола 106 скважины без вращения буровой компоновки 107.
Устройство 111 для измерений во время бурения может содержать по меньшей мере одно приемное устройство 110. Как описано ранее, приемное устройство 110 может без ограничения содержать датчик индукционного типа, магнитоизмерительный датчик на эффекте Холла, магнитный градиометр или сочетание или пару любых магнитоизмерительных приборов, указанных ранее. Аналогично, приемное устройство 110 может являться одноосным, двухосным или трехосным датчиком, а также может являться датчиком магнитного, соленоидного или катушечного типа. В частных вариантах реализации приемное устройство 110 может быть расположено на различных участках в пределах компоновки 109 низа бурильной колонны или над компоновкой 109 низа бурильной колонны, например, между бурильной колонной 108 и компоновкой 109 низа бурильной колонны. Расположение приемного устройства 110 максимально близко к низу скважины может быть преимущественным. Например, в частных вариантах реализации приемное устройство 110 может быть расположено в буровом долоте 113, а не в переводнике компоновки низа бурильной колонны приблизительно над буровым долотом 113.
Операции измерения дальности могут требовать идентификации положения целевого объекта. В изображенном варианте реализации целевой объект содержит второй ствол 103 скважины. Ствол 103 скважины может содержать целевую скважину, содержащую или состоящую из электропроводящего элемента, такого как обсадная колонна, потайная колонна или бурильная колонна, или любого его участка, в котором произошел выброс или который требует пересечения, сопровождения или обхода. В изображенном варианте реализации ствол 103 скважины содержит электропроводящую обсадную колонну 140. Идентификация места расположения целевой скважины 103 может включать сбор различных измерений и определение направления целевой скважины 103 относительно ствола 106 скважины. Эти измерения могут содержать измерения электромагнитных полей в пласте с использованием приемного устройства 110. Измерения магнитного поля позволяет идентифицировать расстояние и направление к целевой скважине 103.
В частных вариантах реализации, осуществление измерений дальности может включать электромагнитное (EM) поле внутри второго ствола 103 скважины. В изображенном варианте реализации индуцирование магнитного поля внутри ствола скважины включает передачу изменяющегося во времени сигнала 134 в пласт 102 с использованием передатчика 114, присоединенного к буровой компоновке 107. Изменяющийся во времени сигнал 134 может содержать, например, электрический сигнал переменного тока. Изменяющийся во времени сигнал 134 может быть создан, например, с помощью электродного или соленоидного передатчика. В изображенном варианте реализации передатчик 114 нагнетает или индуцирует изменяющийся во времени сигнал 134 внутри пласта 102. В частности, буровая компоновка 107 содержит переводник 112 зазора, который может обеспечивать создание дипольного электрического поля на переводнике 112 зазора для способствования передачи тока в пласт 102. Изменяющийся во времени сигнал 134 может быть индуцирован внутри пласта 102 посредством подачи энергии на передатчик 114 буровой компоновки 107 в соответствии с сигналом управления, указывающим характеристики сигнала для изменяющегося во времени сигнала 134. Следует отметить, что переводник 112 зазора используют для направления изменяющегося во времени сигнала 134 от передатчика 114 к приемному устройству 110. Однако наличие переводника 112 зазора может не требоваться при расположении передатчика 114 достаточно далеко от приемного устройства 110. Например, в частных вариантах реализации передатчик 114 может быть расположен на расстоянии приблизительно 10-200 футов (3,048-60,96 м) от приемного устройства 110.
Часть индуцированного изменяющегося во времени сигнала 134 может быть получена и сконцентрирована на обсадной колонне 140 внутри целевой скважины 103, изображенная как ток 138, а ток 138 на обсадной колонне 140 может содержать магнитное поле 136 в радиальном направлении от направления потока электрического тока 138. Остаточный индуцированный ток 134 может возвращаться к буровой компоновке 107 на возврате 116 тока буровой компоновки 107 под переводником 112 зазора. Приемное устройство 110 может измерять магнитное поле 136, индуцированное изменяющимся во времени сигналом 134. В других вариантах реализации, как будет понятно специалисту в данной области техники после ознакомления с настоящим описанием, передатчик 114 может содержать антенну, а изменяющийся во времени сигнал может содержать изменяющееся во времени магнитное поле, исходящее от передатчика 114. Изменяющееся во времени магнитное поле может содержать изменяющийся во времени сигнал и образованное в результате вторичное изменяющееся во времени магнитное поле во втором стволе 103 скважины, которое затем может быть измерено приемным устройством 110.
Блок 104 управления может быть расположен на поверхности 105 и может быть присоединен к скважинным элементам с возможностью обмена данными. Например, блок 104 управления может быть с возможностью обмена данными присоединен к устройству 111 для измерений во время бурения, передатчику 114, буровому долоту 113, и т.д. через телеметрическую систему 118. Телеметрическая система 118 может быть встроена в компоновку 109 низа бурильной колонны и может содержать телеметрическую систему гидроимпульсного типа, передающую информацию между расположенным на поверхности блоком 104 управления и скважинными элементами через импульсы давления в буровом растворе. Хотя блок 104 управления расположен на поверхности 105 на фиг. 1, конкретные элементы обработки, памяти и управления могут быть расположены внутри буровой компоновки 107. Дополнительно, различные другие коммуникационные схемы могут быть использованы для передачи данных от/к блоку 104 управления, включая проводные конфигурации и беспроводные конфигурации.
В частных вариантах реализации блок 104 управления может содержать систему обработки информации по меньшей мере с процессором и запоминающим устройством, присоединенным к процессору, которое содержит набор инструкций, которые при выполнении обеспечивают выполнение процессором конкретных действий. Использованная в настоящем описании система обработки информации может содержать любые приспособления или сочетание инструментов, выполненных с возможностью вычисления, классификации, обработки, передачи, приема, извлечения, создания, переключения, хранения, отображения, проявления, обнаружения, записи, воспроизведения, управления или использования любой формы информации, сведений или данных для бизнеса, науки, управления или других целей. Например, система обработки информации может являться компьютерным терминалом, сетевым устройством хранения данных или любым подходящим устройством, и может иметь разный размер, форму, производительность, функциональность и цену. Система обработки информации может содержать оперативное запоминающее устройство (ОЗУ), один или большее количество вычислительных ресурсов, таких как центральный процессор (ЦП), или аппаратную или программную схему управления, постоянное запоминающее устройство (ПЗУ) и/или энергонезависимое запоминающее устройство других типов. Дополнительные компоненты системы обработки информации могут содержать один или большее количество дисковых приводов, один или большее количество сетевых портов для обмена данными с внешними устройствами, а также различные устройства ввода-вывода (В/В), такие как клавиатура, мышь и видео дисплей. Система обработки информации может также содержать один или большее количество концентраторов, выполненных с возможностью обеспечения обмена данными между различными аппаратными компонентами.
Изменяющийся во времени сигнал 134, созданный передатчиком 114, может характеризоваться по меньшей мере одной характеристикой сигнала, включая частоту, форму, амплитуду и фазу сигнала. В частных вариантах реализации блок 104 управления может управлять изменяющимся во времени сигналом 134 посредством передачи команд, соответствующих конкретным характеристикам сигнала, к скважинному устройству управления (не показано), присоединенному к передатчику. Команды могут обеспечивать создание скважинным устройством управления изменяющегося во времени сигнала 134 с использованием передатчика 114. В других частных вариантах реализации блок 104 управления может непосредственно создавать изменяющийся во времени сигнал 134.
В частных вариантах реализации характеристики сигнала могут быть основаны по меньшей мере частично на по меньшей мере одной скважинной характеристике внутри ствола 106 скважины и пласта 102, включая уровень шума внутри пласта; передаточную функцию по частоте передатчика 114, приемного устройства 110 и пласта 102; и частотную характеристику объекта. Уровень шума внутри пласта 102 может быть измерен в скважине с использованием, например, электромагнитных или акустических приемных устройств, присоединенных к буровой компоновке. Передаточная функция по частоте и частотная характеристика целевого ствола 103 скважины могут быть определены на основании различных математических моделей, или могут быть экстраполированы из полученных ранее измерений дальности.
В частных вариантах реализации блок 104 управления может определять или изменять характеристики сигнала изменяющегося во времени сигнала 134 по меньшей мере частично на основании скважинных характеристик. Например, скважинные характеристики могут быть использованы для определения характеристик сигнала изменяющегося во времени сигнала 134 перед передачей изменяющегося во времени сигнала 134 от передатчика 114. Аналогично, характеристики сигнала могут быть изменены в режиме реального времени в зависимости от результирующего индуцированного магнитного поля 136, измеренного на приемном устройстве 110. В частных вариантах реализации характеристики сигнала могут быть определены или изменены оператором, осуществляющим наблюдение за качеством измерений дальности, или автоматизированным алгоритмом, выбирающим оптимизированные характеристики сигнала для различных скважинных характеристик.
В частных вариантах реализации блок 104 управления может также отправлять команды к приемному устройству 110 для обеспечения измерения им индуцированного магнитного поля 136 на втором стволе 103 скважины. Аналогично передатчику 114, приемное устройство 110 может быть присоединено к скважинному устройству управления, а команды от блока 104 управления могут осуществлять управление, например, при сборе измерений. В частных вариантах реализации блок 104 управления может определять и задавать частоту дискретизации индуцированного магнитного поля 136 в соответствии со следующим описанием. Дополнительно, измерения, собранные приемным устройством 110, могут быть переданы к блоку 104 управления через телеметрическую систему 118. Блок 104 управления может определять расстояние и направление к целевому объекту, стволу 103 скважины в изображенном варианте реализации, по меньшей мере частично на основании измерений индуцированного магнитного поля 136. Например, блок 104 управления может использовать геометрические алгоритмы для определения расстояния и направления второго ствола 103 скважины относительно ствола 106 скважины.
В частных вариантах реализации определение расстояния и направления второго ствола 103 скважины относительно первого ствола 106 скважины может быть осуществлено с использованием магнитных полей, полученных приемным устройством 110. В частных вариантах реализации определение расстояния и направления может быть достигнуто с использованием соотношения в уравнении (1) между током на трубе и полученными магнитными полями.

где H выражает вектор магнитного поля, I выражает ток на трубе 140, r выражает наиболее короткое расстояние между приемным устройством 110 и трубой 140; а φ выражает вектор, перпендикулярный оси z приемного устройства 110 и наиболее короткому вектору, присоединяющему трубу 140 к приемному устройству 110. Хотя в уравнении (1) используется постоянный ток вдоль трубы, оно может быть использовано для любого распределения тока посредством использования подходящей модели.
В частных вариантах реализации расстояние и направление второго ствола 103 скважины относительно первого ствола 106 скважины могут быть определены с использованием уравнений (2) и (3), соответственно.


где ⋅ выражает вектор операцию внутреннего произведения. Однако в частных примерах уравнение (2) может быть ненадежным при невозможности непосредственного или точного измерения I.
При затруднении или невозможности непосредственного или точного измерения I, измерение градиента магнитного поля может быть использовано для измерения направления и расстояния. Пространственное изменение магнитного поля может быть измерено в направлении, содержащем существенную составляющую в радиальном (ось r) направлении, например, как в уравнении (4).

где ∂ выражает частичную производную. При доступности этого измерения градиента в дополнение к абсолютному измерению, расстояние до второго ствола 103 скважины может быть вычислено с использованием уравнения (5).

В частных вариантах реализации градиентное поле в уравнении (5) может быть практически реализовано посредством использования конечной разности дипольных измерений двух магнитных полей, как показано далее в уравнении (6):

где Hy и градиентные компоненты измерения изображены в 4-дипольной конфигурации по фиг. 3 относительно целевой трубы и магнитных полей, образованных токами на трубе.
В частных вариантах реализации изменяющийся во времени сигнал 134 может быть также использован для индуцирования магнитного поля на других целевых объектах внутри пласта 102. Например, измерения дальности обычно совмещают с операциями наклонно-направленного бурения для пересечения целевой скважины или пласта. В частных вариантах реализации изогнутый переводник может быть встроен в компоновку 109 низа бурильной колонны для установления угла наклонно-направленного бурения для буровой компоновки 107. Изменяющийся во времени сигнал 134 может быть использован для индуцирования магнитного поля на участке компоновки 109 низа бурильной колонны под изогнутым переводником для идентификации азимутного направления бурения.
В других частных вариантах реализации изменяющийся во времени сигнал 134 может содержать акустический сигнал. Акустические передатчики могут быть встроены в буровую компоновку 107 и могут передавать изменяющийся во времени акустический сигнал в пласт. Целевой объект, такой как ствол 103 скважины, может отражать некоторые из изменяющихся во времени акустических сигналов, а акустические приемные устройства на буровой компоновке 107 могут принимать и измерять отраженный акустический сигнал.
На фиг. 2 представлена диаграмма, иллюстрирующая приведенную в качестве примера систему 200 обработки информации в соответствии с аспектами настоящего изобретения. Блок 104 управления может быть выполнен в форме, подобной системе 200 обработки информации. Процессор или ЦП 201 системы 200 обработки информации присоединен к контроллеру-концентратору памяти или северному мосту 202 с возможностью обмена данными. Контроллер-концентратор 202 памяти может содержать контроллер памяти для направления информации в различные системные компоненты памяти или из них в системе 200 обработки информации, например ОЗУ 203, элемент 206 хранения и жесткий диск 207. Контроллер-концентратор 202 памяти может быть присоединен к ОЗУ 203 и блоку 204 графической обработки. Контроллер-концентратор 202 памяти может также быть присоединен к контроллеру-концентратору ввода-вывода или южному мосту 205. Концентратор 205 ввода-вывода присоединен к элементам хранения системы 200 обработки информации, включая элемент 206 хранения, который может содержать флэш-ПЗУ, содержащее базовую систему ввода-вывода (BIOS) компьютерной системы. Концентратор 205 ввода-вывода также присоединен к жесткому диску 207 системы 200 обработки информации. Концентратор 205 ввода-вывода может также быть присоединен к ультрабольшой ИС 208 ввода-вывода, которая присоединена к нескольким портам ввода-вывода компьютерной системы, включая клавиатуру 209 и мышь 210.
В соответствии с аспектами настоящего изобретения изменяющийся во времени сигнал, переданный в пласт посредством передатчика, может содержать асимметричный изменяющийся во времени сигнал. Изменяющийся во времени сигнал может являться асимметричным, если он содержит асимметрию между интенсивностью перемещения сигнала по направлению вверх и вниз. Асимметричный изменяющийся во времени сигнал может содержать, например, по меньшей мере одно из сформированных импульсов, треугольной волны и синусоидальной волны. При использовании симметричного сигнала, такого как одночастотная синусоида, для индуцирования магнитного поля в целевой скважине, направление целевой скважины относительно разгрузочной скважины может быть известно только с неточностью, составляющей 180°. Это является следствием обычного отсутствия синхронизации фазы между передатчиком и приемным устройством, в связи со сложностью такого соединения, а также в результате того, что знак его амплитуды в определенное время и может быть неразрешимым на разгрузочной скважине. Другими словами, в случае симметричного сигнала отсутствует возможность отличить случай с одной фазой сигнала и целевым азимутом от другого случая со смещением 180° от фазы сигнала с целевым азимутом 180°. Посредством асимметричного сигнала, как описано далее, может обеспечиваться возможность определения знака полученного магнитного поля и точного определения направления целевой скважины.
На фиг. 4 представлен график, иллюстрирующий приведенный в качестве асимметричный изменяющийся во времени сигнал 400, нанесенный на график относительно амплитуды и времени сигнала, в соответствии с аспектами настоящего изобретения. В изображенном варианте реализации асимметричный изменяющийся во времени сигнал 400 содержит модулированный синусоидальный сигнал, сочетающий два изменяющихся во времени синусоидальных сигнала с различными частотами. В частности, асимметричный изменяющийся во времени сигнал 300 содержит составляющую сигнала для измерения дальности, имеющую первую частоту, и составляющую сигнала для идентификации знака, имеющую вторую частоту. Используемая в настоящем описании составляющая сигнала для измерения дальность, может являться первичным сигналом, используемым для индуцирования магнитного поля в целевой скважине. Аналогично, составляющая сигнала для идентификации знака может быть использована для идентификации знака магнитного поля, полученного на приемном устройстве. Составляющая сигнала для измерения дальности, и составляющая сигнала для идентификации знака, могут содержать симметричные синусоиды, образующие асимметричный изменяющийся во времени сигнал при совмещении. Характеристики асимметричного изменяющегося во времени сигнала 400 могут содержать по меньшей мере одно из первой частоты, второй частоты, амплитуды составляющей сигнала для измерения дальности, и амплитуды составляющей сигнала для идентификации знака, фазы составляющей сигнала для измерения дальности; фазы составляющей сигнала для идентификации знака; разности фаз между составляющей сигнала для измерения дальности и составляющей сигнала для идентификации знака.
В частных вариантах реализации вторая частота может являться нецелым кратным первой частоты. Это может обеспечивать более близкое расположение частот и меньшую подверженность воздействию частотной характеристики пласта и электрическими элементами приспособления. Пласт, передатчик, приемное устройство и целевая скважина могут иметь частотные характеристики, по-разному взаимодействующие с сигналами различных частот. Чем дальше первая и вторая частоты находятся друг от друга, тем большая вероятность различного воздействия различных частотных характеристик на сигналы. Использование нецелого кратного между первой и второй частотами обеспечивает возможность более близкого расположения частот друг к другу, и большую вероятность одинакового воздействия частотной характеристики пласта. Это может уменьшать ошибки во время идентификации одного или большего количества знаков или амплитуд, коэффициента амплитуды и фазы или разности фаз сигналов различной частоты.
Как описано ранее, характеристики сигнала могут быть основаны по меньшей мере частично на скважинной характеристике. На фиг. 5 представлен график 500, иллюстрирующий приведенные в качестве примера скважинные характеристики относительно асимметричного изменяющегося во времени сигнала в соответствии с аспектами настоящего изобретения. На график 500 нанесены скважинные характеристики и асимметричный изменяющийся во времени сигнал относительно амплитуды в децибелах и частоты герцах (Гц). В частности, график 500 иллюстрирует приведенную в качестве примера передаточную функцию 501 по частоте, приведенный в качестве примера уровень 502 шума, приведенную в качестве примера составляющую 503 сигнала для измерения дальности, и приведенную в качестве примера составляющую 504 сигнала для идентификации знака. Передаточная функция 501 по частоте может содержать совмещенную частотную характеристику передатчика, приемного устройства и пласта в данной операции определения дальности. В изображенном варианте реализации передаточная функция 501 по частоте выполняет функцию полосного фильтра, в котором частоты между приблизительно 1 и 50 Гц передают без существенного подавления амплитуды, а частоты выше или ниже этих диапазонов подавлены. Уровень 502 шума идентифицирует шум внутри ствола скважины/пласта через его частотную составляющую. Шум может быть вызван, например, действиями целевой скважины - например, перемещающимися углеводородами из выброса - действия в разгрузочной скважине - например, операциями бурения - окружающим шумом внутри пласта и электронный шум системы. В изображенном варианте реализации уровень 502 шума превышает приблизительно 10 децибел на низких частотах и в целом ниже на высоких частотах.
В частных вариантах реализации характеристики сигнала асимметричного изменяющегося во времени сигнала могут быть определены или модифицированы в соответствии с скважинными характеристиками, отображенными на фиг. 5. Например, частоты составляющей 503 сигнала для измерения дальности и составляющей 504 сигнала для идентификации знака могут быть выбраны таким образом, чтобы находиться в пределах полосы частот передаточной функции 501. Аналогично, амплитуда каждого из составляющей 503 сигнала для измерения дальности и составляющей 504 сигнала для идентификации знака, может быть оптимизирована в соответствии с уровнем 502 шума. В частных вариантах реализации амплитуды составляющей 503 сигнала для измерения дальности и составляющей 504 сигнала для идентификации знака, могут иметь обратную зависимость. Это может быть вызвано использованием ограниченного источника электропитания для передачи составляющей 503 сигнала для измерения дальности и составляющей 504 сигнала для идентификации знака в пласт.
В частных вариантах реализации может быть определено соотношение сигнал-шум, требуемое для индуцирования магнитного поля в целевой скважине и приема индуцированного магнитного поля. Амплитуда составляющей 504 сигнала для идентификации знака, может быть определена по меньшей мере частично на основании соотношения сигнал-шум, а остающееся электропитание может быть направлено на передачу составляющей 504 сигнала для измерения дальности. В относительно тихих системах, например, большая часть электропитания из источника электропитания может быть направлена на составляющую 503 сигнала для измерения дальности, увеличивая расстояние проникновения асимметричного изменяющегося во времени сигнала в пласт, при этом также обеспечивая определения знака на приемном устройстве. В отличие от этого, в относительно шумной системе, большее количество электропитания может быть направлено на составляющую сигнала для идентификации знака, обеспечивая возможность определения приемным устройством направления цели.
В дополнение к скважинными характеристикам, изображенным на фиг. 5, характеристики асимметричных изменяющихся во времени сигналов могут быть основаны по меньшей мере частично на частотной характеристике целевого объекта. Например, различные цели могут иметь различные частотные характеристики. В частности, сигналы из скважины обсадной колонны могут быть маленькими для очень низких частот, а также для очень высоких частоты. При наличии известной частотной характеристики цели, ее спектр частот может быть смоделирован, а частота асимметричного изменяющегося во времени сигнала может быть соответственно выбрана или изменена. Альтернативно, частота асимметричного изменяющегося во времени сигнала может быть основана на скважинной характеристике, восстановленной из предыдущего измерения. Например, величина частот с небольшой величиной отклика может быть увеличена посредством возбуждения, при этом противоположное может быть сделано для частот с большей величиной отклика для составляющих сигнала для измерения дальности сигнала и идентификации сигнала.
В частных вариантах реализации частота дискретизации индуцированного магнитного поля может быть определена на основании по меньшей мере одной частоты асимметричного изменяющегося во времени сигнала. Частота дискретизации может соответствовать количеству измерений, осуществленных приемным устройством. При изменении первой или второй частоты соответствующих составляющих сигнала для измерения дальности сигнала и идентификации знака, частота дискретизации приемного устройства может также быть изменена таким образом, чтобы обеспечивать сбор достаточного количества дискрет для точного отображения содержания индуцированного магнитного поля.
В частных вариантах реализации определение частота дискретизации индуцированного магнитного поля на основании по меньшей мере одной частоты асимметричного изменяющегося во времени сигнала может включать уменьшение частоты дискретизации до значения ниже значения, указанного критерием Найквиста. Посредством уменьшения количества дискрет может быть уменьшено потребление электропитания, а также нагрузка данными, передаваемыми к поверхности. Как описано ранее, передача данных к поверхности может происходить через телеметрическую систему с ограниченным диапазоном частот. Уменьшение количества дискрет уменьшает нагрузку данными, которые требуется передать, и может увеличивать скорость осуществления измерений и вычислений дальности.
В частных вариантах реализации определение частоты дискретизации индуцированного магнитного поля на основании по меньшей мере одной частоты асимметричного изменяющегося во времени сигнала может включать решение уравнения (7):


Аспекты настоящего изобретения могут быть использованы при вращении буровой компоновки при обычной операции бурения и при нахождении буровой компоновки в неподвижном состоянии. Как описано ранее, передатчик и приемное устройство могут быть присоединены к буровой компоновке, расположенной внутри ствола скважины. В вариантах реализации, в которых измерения собирают во время вращения буровой компоновки, частота дискретизации может быть модифицирована для совпадения со скоростью вращения буровой компоновки. Это может обеспечивать становление части шума, образованного бурением в полученном сигнале, постоянным сдвигом базовой линии, который может быть устранен посредством фильтрации верхних частот. Кроме того, это позволяет удалять азимутные изменения в полученном сигнале вследствие вращения, которые могут быть нежелательными на основании применения.
Дополнительно, частота дискретизации может быть отрегулирована, например, на основании любого измерения ориентации приспособления, например измерения магнитоизмерительным прибором или измерителем ускорения. Аналогично, частота дискретизации может быть изменена для поправки на скачкообразную подачу в буровом долоте для обеспечения азимутально правильных измерений. На основании измеренного положения, скорости или ускорения бурового долота частота дискретизации может быть регулирована для поддержания постоянной пространственной частоты дискретизации. Например, в условиях скольжения частота дискретизации может быть увеличена, или в условиях застревания частота дискретизации может быть уменьшена. Также возможна синтетическая реализация описанных ранее способов посредством применения эквивалентного алгоритма коррекции к данным с постоянной дискретизацией по времени.
На фиг. 6 представлен график, иллюстрирующий приведенный в качестве примера асимметричный изменяющийся во времени сигнал 600 в соответствии с аспектами настоящего изобретения. В отличие от сигнала 400, который является синусоидой, сигнал 600 содержит множество пульсов, характеризующихся асимметричным поведением. Сигнал сформированного импульса может иметь характеристики сигнала, такие как максимальное значение, минимальное значение и ширину перехода от отрицательного значения в положительное. Аналогично синусоидальному сигналу, импульсы подвержены воздействию скважинных характеристик, таких как передаточная функция по частоте передатчика, приемного устройства и пласта. В частных вариантах реализации импульсы могут быть сконфигурированы для нейтрализации полосовых эффектов, описанных ранее, посредством использования очень высоких амплитуд на очень низких и очень высоких частотах. Это может уменьшать искажения в форме полученного сигнала для обеспечения возможности лучшего определения знака при более высоких уровнях шума. Дополнительно, импульс может быть отделен от спектра шума посредством сбора измерения шума в режиме реального времени и усиления частот, менее подверженных его воздействию.
Следовательно, настоящее изобретение хорошо приспособлено для достижения описанных и свойственных результатов и преимуществ. Частные варианты реализации, описанные ранее, являются иллюстративными, так как настоящее изобретение может быть модифицировано и реализовано другими, но эквивалентными способами, понятными специалистам в данной области техники, у которых есть возможность ознакомиться с настоящим описанием. Кроме того, описанные в настоящем описании подробности конструкции или проекта не содержат ограничений за исключением описанных далее в формуле изобретения. Таким образом, следует понимать, что частные иллюстративные варианты реализации, раскрытые ранее, могут быть изменены или модифицированы, при этом все такие изменения находятся в пределах объема и сущности настоящего изобретения. Также, термины в формуле изобретения использованы в их простом, обычном значении, если обратное явным образом не указано заявителем. Под использованной в формуле изобретения формой единственного числа следует понимать один или большее количество элементов.



Изобретение относится к измерениям дальности во время бурения. Сущность: способ измерений дальности внутри пласта включает передачу асимметричного изменяющегося во времени сигнала от передатчика (114), расположенного внутри ствола (106) скважины, в пласт. Асимметричный изменяющийся во времени сигнал может иметь характеристику сигнала, по меньшей мере частично основанную на скважинной характеристике. Приемное устройство (110), расположенное внутри ствола (106) скважины, может измерять магнитное поле, индуцированное на объект (103) внутри пласта, с помощью асимметричного изменяющегося во времени сигнала. Направление к объекту (103) от ствола (106) скважины может быть определено по меньшей мере частично на основании измерения индуцированного магнитного поля. Технический результат: повышение точности. 2 н. и 18 з.п. ф-лы, 6 ил.
1. Способ осуществления измерений дальности внутри пласта, согласно которому
передают асимметричный изменяющийся во времени сигнал от передатчика, расположенного внутри ствола скважины, в пласт, причем асимметричный изменяющийся во времени сигнал содержит характеристику сигнала, основанную по меньшей мере частично на характеристике скважины;
измеряют на приемном устройстве, расположенном внутри ствола скважины, магнитное поле, индуцированное в объекте внутри пласта с помощью асимметричного изменяющегося во времени сигнала; и
определяют направления к объекту от ствола скважины по меньшей мере частично на основании измерения индуцированного магнитного поля.
2. Способ по п. 1, согласно которому
асимметричный изменяющийся во времени сигнал содержит по меньшей мере одно из сформированных импульсов, треугольной волны и синусоидальной волны; и
характеристика сигнала содержит по меньшей мере одно из частоты, формы и амплитуды асимметричного изменяющегося во времени сигнала.
3. Способ по п. 1, согласно которому
асимметричный изменяющийся во времени сигнал содержит составляющую сигнала для измерения дальности, имеющую первую частоту, и составляющую сигнала для идентификации знака, имеющую вторую частоту; и
вторая частота является нецелым кратным первой частоты.
4. Способ по п. 3, согласно которому скважинная характеристика содержит по меньшей мере одно из уровня шума внутри пласта; передаточной функции по частоте передатчика, приемного устройства и пласта; и частотной характеристики объекта.
5. Способ по п. 4, согласно которому характеристика сигнала содержит по меньшей мере одно из
первой частоты;
второй частоты;
амплитуды составляющей сигнала для измерения дальности;
амплитуды составляющей сигнала для идентификации знака;
коэффициента амплитуды составляющей сигнала для измерения дальности к составляющей сигнала для идентификации знака;
фазы составляющей сигнала для измерения дальности;
фазы составляющей сигнала для идентификации знака; и
разности фаз между составляющей сигнала для измерения дальности и составляющей сигнала для идентификации знака.
6. Способ по п. 5, согласно которому
амплитуда составляющей сигнала для измерения дальности, амплитуда составляющей сигнала для идентификации знака имеют обратную зависимость; и
амплитуда составляющей сигнала для идентификации знака определена по меньшей мере частично на основании заранее определенного соотношения сигнал-шум.
7. Способ по п. 5, согласно которому дополнительно определяют частоту дискретизации индуцированного магнитного поля на основании по меньшей мере одной частоты асимметричного изменяющегося во времени сигнала.
8. Способ по п. 7, согласно которому определение частоты дискретизации индуцированного магнитного поля включает решение следующего уравнения:

где N представляет количество дискрет, n представляет индекс дискрета, ω1 и ω2 представляют первую и вторую частоты в радианах соответственно; A и B представляют амплитуды составляющей для измерения дальности сигнала и составляющей сигнала для идентификации знака; Δt представляет период одного дискрета, ϕ представляет относительную фазу, отличающуюся между передатчиком и приемным устройством; и K(τ) представляет дискретное ядро системы аналогово-цифрового преобразования.
9. Способ по п. 1, согласно которому
передатчик и приемное устройство присоединены к буровой компоновке, расположенной внутри ствола скважины; и
измерение на приемном устройстве индуцированного магнитного поля включает определение частоты дискретизации индуцированного магнитного поля на основании скорости вращения буровой компоновки.
10. Способ по п. 1, в котором объект содержит изогнутый переводник, присоединенный к буровой компоновке, расположенной внутри ствола скважины.
11. Система для осуществления измерений дальности внутри пласта, содержащая
передатчик;
приемное устройство;
процессор, присоединенный к передатчику и приемному устройству с возможностью обмена данными; и
запоминающее устройство, присоединенное к процессору и содержащее набор инструкций, которые при выполнении обеспечивают выполнение процессором:
направления команды передатчику для передачи в пласт асимметричного изменяющегося во времени сигнала, причем асимметричный изменяющийся во времени сигнал содержит характеристику сигнала, по меньшей мере частично основанную на скважинной характеристике;
направления команды приемному устройству для измерения магнитного поля, индуцированного в объекте внутри пласта асимметричным изменяющимся во времени сигналом;
определения направления к объекту от ствола скважины по меньшей мере частично на основании измерения индуцированного магнитного поля.
12. Система по п. 11, в которой
асимметричный изменяющийся во времени сигнал содержит по меньшей мере одно из сформированных импульсов, треугольной волны и синусоидальной волны; и
характеристика сигнала содержит по меньшей мере одно из частоты, формы и амплитуды асимметричного изменяющегося во времени сигнала.
13. Система по п. 11, в которой
асимметричный изменяющийся во времени сигнал содержит компонент сигнала, измеряющий дальность, с первой частотой и компонент сигнала, идентифицирующий знак, со второй частотой; и
вторая частота является нецелым кратным первой частоты.
14. Система по одному из пп. 11-13, в которой скважинная характеристика содержит по меньшей мере одно из уровня шума внутри пласта; передаточной функции по частоте передатчика, приемного устройства и пласта; и частотной характеристики объекта.
15. Система по п. 14, в которой характеристика сигнала содержит по меньшей мере одно из
первой частоты;
второй частоты;
амплитуды составляющей сигнала для измерения дальности;
амплитуды составляющей сигнала для идентификации знака;
коэффициента амплитуды составляющей сигнала для измерения дальности к составляющей сигнала для идентификации знака;
фазы составляющей сигнала для измерения дальности;
фазы составляющей сигнала для идентификации знака; и
разности фаз между составляющей сигнала для измерения дальности и составляющей сигнала для идентификации знака.
16. Система по п. 15, в которой
амплитуда составляющей сигнала для измерения дальности, амплитуда составляющей сигнала для идентификации знака имеют обратную зависимость; и
амплитуда составляющей сигнала для идентификации знака определена по меньшей мере частично на основании заранее определенного соотношения сигнал-шум.
17. Система по п. 15, дополнительно содержащая определение частоты дискретизации индуцированного магнитного поля на основании по меньшей мере одной частоты асимметричного изменяющегося во времени сигнала.
18. Система по п. 17, в которой определение частоты дискретизации индуцированного магнитного поля включает решение следующего уравнения:

где N представляет количество дискрет, n представляет индекс дискрета, ω1 и ω2 представляют первую и вторую частоты в радианах соответственно; A и B представляют амплитуды составляющей сигнала для измерения дальности и составляющей сигнала для идентификации знака; Δt представляет период одного дискрета, ϕ представляет относительную фазу, отличающуюся между передатчиком и приемным устройством; и K(τ) представляет дискретное ядро системы аналогово-цифрового преобразования.
19. Система по п. 11, в которой
передатчик и приемное устройство присоединены к буровой компоновке, расположенной внутри ствола скважины; и
измерение на приемном устройстве индуцированного магнитного поля включает определение частоты дискретизации индуцированного магнитного поля на основании скорости вращения буровой компоновки.
20. Система по п. 11, в которой объект содержит изогнутый переводник, присоединенный к буровой компоновке, расположенной внутри ствола скважины.
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ АМОРТИЗАТОР | 2011 |
|
RU2481506C1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| US 5343152 A, 30.08.1994 | |||
| WO 9845733 A1, 15.10.1998 | |||
| УСТРОЙСТВО ИЗМЕРЕНИЯ РАССТОЯНИЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ МЕЖДУ ДВУМЯ БУРОВЫМИ СКВАЖИНАМИ (ВАРИАНТЫ), СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ МЕЖДУ ДВУМЯ БУРОВЫМИ СКВАЖИНАМИ, УЗЕЛ СОЛЕНОИДА УСТРОЙСТВА ИЗМЕРЕНИЯ РАССТОЯНИЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ МЕЖДУ ДВУМЯ БУРОВЫМИ СКВАЖИНАМИ | 2007 |
|
RU2468200C2 |
| ОПРЕДЕЛЕНИЕ РАССТОЯНИЯ МАГНИТНЫМИ СРЕДСТВАМИ ПРИ БУРЕНИИ ПАРАЛЛЕЛЬНЫХ СКВАЖИН | 2007 |
|
RU2436924C2 |

