ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится в целом к воздушному судну, а еще точнее к определению положения воздушного судна. Кроме того, настоящее изобретение относится к способу и устройству для определения положения воздушного судна в водной среде после непреднамеренного столкновения с этой водной средой.
Воздушное судно обычно используют для транспортировки людей или грузов. Воздушное судно может совершать полет над различными типами земной поверхности при перемещении от начального положения в конечное положение. Земная поверхность может содержать равнины, горы, водные объекты и другие типы земной поверхности.
Время от времени воздушное судно может непреднамеренно сталкиваться с рельефом местности. Когда возникают такие случаи, выполняют исследования для идентификации причины непреднамеренного столкновения с рельефом местности. Анализ может быть использован для создания улучшения воздушного судна, работы воздушного судна и/или некоторого их сочетания.
При идентификации причины непреднамеренного столкновения с рельефом местности, часто необходимо определить положение воздушного судна или каких-либо его обломков для их анализа. Непреднамеренное столкновение с рельефом местности может привести к возникновению обломков, содержащих различные конструкции воздушного судна. Эти конструкции могут содержать, например, помимо прочего, крыло, двигатель, часть фюзеляжа, записывающее устройство для записи данных и/или другие компоненты. Различные конструкции могут быть проанализированы для определения того, могло ли нарушение поспособствовать непреднамеренному столкновению с рельефом местности. Записывающие устройства для записи данных могут быть использованы для анализа информации, которая возникает во время полета воздушного судна. Эти записывающие устройства для записи данных могут содержать записывающие устройства для записи звука, которые записывают разговоры летного экипажа, а также окружающий шум на фоне областей, таких как кабина. Записывающие устройства для записи данных также могут записывать данные, команды и/или другую информацию, пересылаемую между различными компьютерами и устройствами в воздушном судне во время полета. Например, данные о положениях органов управления, характеристиках двигателей, температуре и/или другая информация могут быть получены из этих записывающих устройств для записи данных. Эти записывающие устройства для записи данных могут быть названы записывающими устройствами для записи данных о полете или черными ящиками.
Записывающие устройства для записи данных содержат передатчики сигналов. Передатчики сигналов могут быть использованы для определения положения записывающих устройств для записи данных. В частности, эти записывающие устройства для записи данных могут содержать передатчики звуковых сигналов. Эти передатчики звуковых сигналов могут быть особенно полезны, если произошло непреднамеренное столкновение с рельефом местности в форме водной среды.
Когда воздушное судно непреднамеренно сталкивается с рельефом местности в форме водной среды, то различные конструкции могут быстро затонуть в воде. Некоторые водные среды могут быть особенно глубокими, так что может быть невозможна визуальная идентификация воздушного судна путем перемещения над таким местом. Передатчики звука, используемые с записывающими устройствами для записи данных, могут быть использованы для определения положения записывающих устройств для записи данных в водной среде.
Эти записывающие устройства для записи данных, однако, могут только передавать звуковые сигналы в течение определенного ограниченного периода времени, поскольку указанные записывающие устройства для записи данных основаны на энергии питания от батареи. В итоге, если положение обломков для воздушного судна не может быть определено до того, как передатчик, передающий звуковые сигналы, исчерпает энергию питания в батарее, то нахождение записывающих устройств для записи данных и других обломков может быть сильно затруднено. В некоторых случаях записывающие устройства для записи данных не могут быть найдены в течение нескольких лет или могут быть не найдены никогда. Кроме того, поскольку распределение обломков в водной среде является непредсказуемым, то записывающие устройства для записи данных часто находят в различных областях от других конструкций воздушного судна. Без нахождения обломков, анализ непреднамеренного столкновения с водной средой в большинстве случаев не может быть выполнен надлежащим образом.
Было бы предпочтительно создать способ и устройство, которые решают по меньшей мере некоторые из вышеописанных проблем, а также возможные другие проблемы.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В одном предпочтительном варианте реализации локационная система воздушного судна содержит конструкцию воздушного судна и множество акустических отражателей, связанных с указанной конструкцией воздушного судна. Множество акустических отражателей выполнено с возможностью генерирования первых звуковых сигналов в ответ на прием вторых звуковых сигналов.
В другом предпочтительном варианте реализации локационная система воздушного судна содержит систему звуковой локации. Система звуковой локации выполнена с возможностью отправки первого звукового сигнала, имеющего первую частоту, в водную среду. Первая частота соответствует первому акустическому отражателю, связанному с первой конструкцией воздушного судна для воздушного судна, которое непреднамеренно столкнулось с водной средой. Система звуковой локации дополнительно выполнена с возможностью отправки второго звукового сигнала в водную среду с использованием второй частоты, когда принят ответный сигнал от первого акустического отражателя. Второй звуковой сигнал соответствует второй частоте второго акустического отражателя, связанного со второй конструкцией воздушного судна для воздушного судна, которое непреднамеренно столкнулось с водной средой.
Еще в одном предпочтительном варианте реализации предложен способ определения положения конструкций воздушного судна. Первый звуковой сигнал отправляют в водную среду с использованием первой частоты. Первая частота соответствует первой выбранной частоте для первого акустического отражателя, связанного с первой конструкцией воздушного судна для воздушного судна, которое непреднамеренно столкнулось с водной средой. Второй звуковой сигнал отправляют в водную среду с использованием второй частоты, когда принят ответный сигнал от первого акустического отражателя. Второй звуковой сигнал соответствует второй выбранной частоте второго акустического отражателя, связанного со второй конструкцией воздушного судна для воздушного судна, которое непреднамеренно столкнулось с водной средой.
Еще в одном предпочтительном варианте реализации предложен способ определения положения конструкций воздушного судна. Радиочастотный сигнал, передаваемый от генератора радиочастотного сигнала, связанного с конструкцией воздушного судна для воздушного судна, которое непреднамеренно столкнулось с водной средой, регистрируют посредством спутника. Приблизительное положение конструкции воздушного судна идентифицируют из радиочастотного сигнала. Звуковой сигнал отправляют в водную среду в определенное положение на основании приблизительного положения конструкции воздушного судна. Звуковой сигнал имеет частоту, которая соответствует выбранной частоте акустического отражателя, связанного с конструкцией воздушного судна. Положение конструкции воздушного судна идентифицируют, когда принят ответный сигнал от акустического отражателя. Положение идентифицируют с использованием ответного сигнала.
Согласно аспекту настоящего изобретения, предложена локационная система воздушного судна, содержащая конструкцию воздушного судна и множество акустических отражателей, связанных с указанной конструкцией воздушного судна, причем указанное множество акустических отражателей выполнено с возможностью генерирования первых звуковых сигналов в ответ на прием вторых звуковых сигналов. Предпочтительно вторые звуковые сигналы могут иметь частоту в диапазоне, выбранном для определения положения конструкции воздушного судна. Предпочтительно множество акустических отражателей может содержать первый акустический отражатель, выполненный с возможностью генерирования первых звуковых сигналов, имеющих первую частоту, и второй акустический отражатель, выполненный с возможностью генерирования первых звуковых сигналов, имеющих вторую частоту, которая отлична от первой частоты. Предпочтительно первая частота первого акустического отражателя может обеспечивать возможность генерирования первых звуковых сигналов, имеющих первый диапазон, а вторая частота второго акустического отражателя может обеспечивать возможность генерирования первых звуковых сигналов, имеющих второй диапазон, причем первый диапазон длиннее, чем второй диапазон.
Предпочтительно настоящее изобретение может содержать генерирующую систему для генерирования сигналов, выполненную возможностью приведения в действие посредством конкретного акустического отражателя в указанном множестве акустических отражателей и с возможностью генерирования сигналов для определения положения конструкции воздушного судна, когда она приведена в действие. Предпочтительно генерирующая система для генерирования сигналов может содержать генератор радиочастотного сигнала, выполненный с возможностью генерирования сигналов, когда он приведен в действие, датчик, выполненный с возможностью регистрации первых звуковых сигналов, и управляющее устройство, соединенное с генератором радиочастотного сигнала и датчиком и выполненное с возможностью приведения в действие указанного генератора радиочастотного сигнала, когда указанный датчик регистрирует первые звуковые сигналы.
Предпочтительно управляющее устройство выполнено с возможностью приведения в действие генератора радиочастотного сигнала в течение определенного периода времени в ответ на регистрацию датчиком первых звуковых сигналов. Предпочтительно управляющее устройство выполнено с возможностью сброса периода времени каждый раз, когда зарегистрированы первые звуковые сигналы. Предпочтительно период времени выбирают для увеличения времени работы генератора радиочастотного сигнала. Предпочтительно конструкция воздушного судна может иметь полость, в которой расположен акустический отражатель в указанном множестве акустических отражателей, причем указанная полость выполнена таким образом, что акустический отражатель работает после непреднамеренного столкновения воздушного судна с водной средой, а конструкция воздушного судна связана с воздушным судном. Предпочтительно конструкция воздушного судна имеет множество каналов, соединяющих внешнюю часть конструкции воздушного судна с полостью. Предпочтительно настоящее изобретение может дополнительно содержать канал, соединяющий внешнюю часть конструкции воздушного судна с полостью, и подвижную конструкцию, выполненную с возможностью открытия канала, причем вода совершает перемещение через канал в полость, когда конструкция воздушного судна расположена под водой. Предпочтительно подвижная конструкция выполнена с возможностью открытия канала, когда конструкция воздушного судна по меньшей мере частично расположена под водой. Предпочтительно настоящее изобретение может дополнительно содержать связывающий трос, имеющий первый конец, соединенный с конструкцией воздушного судна, и второй конец, соединенный с акустическим отражателем в указанном множестве акустических отражателей.
Предпочтительно конструкция воздушного судна выполнена с возможностью защиты указанного множества акустических отражателей из воздушного судна, в котором расположена конструкция воздушного судна, при наличии непреднамеренного столкновения с водной средой, которая имеет динамическую нагрузку, составляющую приблизительно до 40g. Предпочтительно конструкция воздушного судна выбрана из крыла, горизонтального стабилизатора, хвостового отсека, корпуса двигателя или воздушного судна. Предпочтительно настоящее изобретение может дополнительно содержать систему звуковой эхолокации, выполненную с возможностью отправки вторых звуковых сигналов и с возможностью регистрации первых звуковых сигналов. Предпочтительно акустический отражатель в указанном множестве акустических отражателей выполнен с возможностью генерирования первых звуковых сигналов, имеющих первую частоту, в ответ на прием вторых звуковых сигналов, имеющих первую частоту. Предпочтительно акустический отражатель в указанном множестве акустических отражателей имеет тип, выбранный из сферы, цилиндра или трехплоскостного отражателя.
Согласно другому аспекту настоящего изобретения предложена локационная система воздушного судна, содержащая систему звуковой локации, выполненную с возможностью отправки первого звукового сигнала, имеющего первую частоту, в водную среду, причем первая частота соответствует первому акустическому отражателю, который связан с первой конструкцией воздушного судна для воздушного судна, которое непреднамеренно столкнулось с водной средой, и который отправляет второй звуковой сигнал в водную среду с использованием второй частоты, когда принят ответный сигнал от первого акустического отражателя, причем второй звуковой сигнал соответствует второй частоте второго акустического отражателя, связанного со второй конструкцией воздушного судна для воздушного судна, которое непреднамеренно столкнулось с водной средой.
Предпочтительно настоящее изобретение может содержать подвижную платформу, причем система звуковой локации связана с указанной подвижной платформой. Предпочтительно настоящее изобретение может содержать первый акустический отражатель и второй акустический отражатель. Предпочтительно первая частота первого акустического отражателя обеспечивает возможность генерирования первого звукового сигнала, имеющего первый диапазон, а вторая частота второго акустического отражателя обеспечивает возможность генерирования первого звукового сигнала, имеющего второй диапазон, причем первый диапазон длиннее, чем второй диапазон. Предпочтительно первый акустический отражатель и второй акустический отражатель имеют тип, выбранный из сферы, цилиндра и трехплоскостного отражателя.
Согласно еще одному аспекту настоящего изобретения предложен способ определения положения конструкций воздушного судна, включающий отправку первого звукового сигнала в водную среду с использованием первой частоты, причем первая частота соответствует первой выбранной частоте первого акустического отражателя, связанного с первой конструкцией воздушного судна для воздушного судна, которое непреднамеренно столкнулось с водной средой, и отправляют второй звуковой сигнал в водную среду с использованием второй частоты, когда принят ответный сигнал от первого акустического отражателя, причем второй звуковой сигнал соответствует второй выбранной частоте второго акустического отражателя, связанного со второй конструкцией воздушного судна для воздушного судна, которое непреднамеренно столкнулось с водной средой. Предпочтительно настоящее изобретение может дополнительно включать идентифицирование положения первой конструкции воздушного судна с использованием ответного сигнала. Предпочтительно ответный сигнал представляет собой первый ответный сигнал и дополнительно включает идентификацию положения второй конструкции воздушного судна с использованием второго ответного сигнала. Предпочтительно первая частота первого акустического отражателя обеспечивает возможность генерирования первого звукового сигнала, имеющего первый диапазон, а вторая частота второго акустического отражателя обеспечивает возможность генерирования первого звукового сигнала, имеющего второй диапазон, причем первый диапазон длиннее, чем второй диапазон. Предпочтительно первый акустический отражатель и второй акустический отражатель имеют тип, выбранный из сферы, цилиндра или трехплоскостного отражателя.
Согласно другому аспекту настоящего изобретения предложен способ определения положения конструкции воздушного судна, включающий этапы, согласно которым регистрируют, посредством спутника, радиочастотный сигнал, передаваемый от генератора радиочастотного сигнала, связанного с конструкцией воздушного судна для воздушного судна, которое непреднамеренно столкнулось с водной средой, идентифицируют приблизительное положение конструкции воздушного судна из радиочастотного сигнала, отправляют звуковой сигнал в водную среду в определенное положение на основании приблизительного положения конструкции воздушного судна, причем звуковой сигнал имеет частоту, которая соответствует выбранной частоте акустического отражателя, связанного с конструкцией воздушного судна, и идентифицируют положение конструкции воздушного судна, когда принят ответный сигнал от акустического отражателя, причем положение идентифицируют с использованием ответного сигнала.
Предпочтительно акустический отражатель имеет тип, выбранный из сферы, цилиндра или трехплоскостного отражателя.
Признаки, функции и преимущества могут быть обеспечены независимо друг от друга в различных вариантах реализации настоящего изобретения или могут быть объединены еще в одних вариантах реализации, в которых можно увидеть дополнительные подробные сведения со ссылкой на приведенные далее описание и чертежи.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Новые признаки, считаемые характеристикой предпочтительных вариантов реализации, заданы в прилагаемой формуле изобретения. Предпочтительные варианты реализации, однако, а также предпочтительный режим использования, дополнительные задачи и их преимущества будут наилучшим образом понятны со ссылкой на приведенное далее подробное описание предпочтительного варианта реализации настоящего изобретения, при его прочтении вместе с прилагаемыми чертежами.
На фиг. 1 показана среда для определения положения воздушного судна, в которой может быть реализован предпочтительный вариант реализации.
На фиг. 2 показана структурная схема среды для определения положения воздушного судна в соответствии с предпочтительным вариантом реализации.
На фиг. 3 показана структурная схема локационной системы воздушного судна в соответствии с предпочтительным вариантом реализации.
На фиг. 4 показана структурная схема системы сигналов в соответствии с предпочтительным вариантом реализации.
На фиг. 5 показан система звуковой локации в соответствии с предпочтительным вариантом реализации.
На фиг. 6 показан акустический отражатель в соответствии с предпочтительным вариантом реализации.
На фиг. 7 показана структурная схема системы сохранения рабочего состояния в соответствии с предпочтительным вариантом реализации.
На фиг. 8 показано воздушное судно в соответствии с предпочтительным вариантом реализации.
На фиг. 9 показана часть воздушного судна в соответствии с предпочтительным вариантом реализации.
На фиг. 10 показано более подробное изображение генератора сигналов в соответствии с предпочтительным вариантом реализации.
На фиг. 11 показан модуль в соответствии с предпочтительным вариантом реализации.
На фиг. 12 показан модуль в развернутой конфигурации в соответствии с предпочтительным вариантом реализации.
На фиг. 13 показан модуль в соответствии с предпочтительным вариантом реализации.
На фиг. 14 показан модуль в неразвернутой конфигурации в соответствии с предпочтительным вариантом реализации.
На фиг. 15 показан модуль в развернутой конфигурации в соответствии с предпочтительным вариантом реализации.
На фиг. 16 показан модуль в неразвернутой конфигурации в соответствии с предпочтительным вариантом реализации.
На фиг. 17 показан модуль в развернутой конфигурации в соответствии с предпочтительным вариантом реализации.
На фиг. 18 показан модуль в соответствии с предпочтительным вариантом реализации.
На фиг. 19 показан модуль в соответствии с предпочтительным вариантом реализации.
На фиг. 20 показан модуль в соответствии с предпочтительным вариантом реализации.
На фиг. 21 показан акустический отражатель в соответствии с предпочтительным вариантом реализации.
На фиг. 22 показан вид акустического отражателя в разрезе в соответствии с предпочтительным вариантом реализации.
На фиг. 23 показана блок-схема процесса определения положения конструкций воздушного судна в соответствии с предпочтительным вариантом реализации.
На фиг. 24 показана блок-схема процесса определения положения конструкций воздушного судна в соответствии с предпочтительным вариантом реализации.
На фиг. 25 показана блок-схема процесса идентификации положения частей воздушного судна в соответствии с предпочтительным вариантом реализации.
На фиг. 26 показана блок-схема процесса генерирования сигналов для использования в определении положения конструкций воздушного судна в соответствии с предпочтительным вариантом реализации.
На фиг. 27 показана блок-схема процесса работы генератора радиочастотного сигнала в соответствии с предпочтительным вариантом реализации.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Различные предпочтительные варианты реализации выявляют и учитывают используемые в настоящее время системы сигналов, которые могут только генерировать сигналы в течение ограниченного периода времени, поскольку эти системы представляют собой питаемые энергией системы сигналов. Различные предпочтительные варианты реализации выявляют и учитывают, что, когда система сигналов использует энергию питания, то батарея или батареи для данной системы сигналов могут работать только в течение определенного ограниченного периода времени.
Различные предпочтительные варианты реализации также выявляют и учитывают, что используемые в настоящее время системы сигналов для записывающих устройств для записи данных непрерывно передают сигналы. В итоге, данный тип передачи может работать только в течение приблизительно 30 дней с используемыми в настоящее время системами сигналов. Таким образом, когда энергия питания исчерпана, нахождение записывающего устройства для записи данных может быть сильно осложнено в водной среде, такой как водная среда 108 на фиг. 1.
Различные предпочтительные варианты реализации выявляют и учитывают, что дополнительные батареи или большие батареи могут быть использованы с системами сигналов. Данный тип решения, однако, может увеличить вес записывающих устройств для записи данных более, чем это необходимо.
Таким образом, различные предпочтительные варианты реализации обеспечивают способ и устройство для определения положения конструкций воздушного судна в водной среде. Различные предпочтительные варианты реализации используют пассивные системы сигналов, которые могут содержать генераторы звука, такие как акустические отражатели. Например, в одном предпочтительном варианте реализации локационная система воздушного судна содержит конструкцию воздушного судна и множество акустических отражателей, связанных с указанной конструкцией воздушного судна. Множество акустических отражателей выполнено с возможностью генерирования первых звуковых сигналов в ответ на прием вторых звуковых сигналов.
На фиг. 1 показана среда для определения положения воздушного судна в соответствии с предпочтительным вариантом реализации. В данном иллюстративном примере среда 100 для определения положения воздушного судна содержит надводный корабль 102 и вертолет 104. Надводный корабль 102 и вертолет 104 могут содержать системы для регистрации звука в форме гидроакустических систем.
Надводный корабль 102 и вертолет 104 могут совершать поиск обломков 106 от воздушного судна, которое непреднамеренно столкнулось с водной средой 108. В этих иллюстративных примерах водная среда 108 может представлять собой любой водный объект. Водная среда 108 может представлять собой, например, помимо прочего, озеро, море, океан и/или некоторый другой подходящий тип водного объекта.
В данном иллюстративном примере обломки 106 расположены в области 110 обломков. Область 110 обломков представляет собой область, в которой расположены обломки 106 воздушного судна.
В этих иллюстративных примерах обломки 106 могут содержать конструкции 112 воздушного судна. Конструкции 112 воздушного судна могут представлять собой, например, помимо прочего, одно из крыльев, двигатель или корпус двигателя, часть фюзеляжа, записывающее устройство для записи данных и/или другие компоненты или конструкции. В этих иллюстративных примерах одна или большее количество конструкций 112 воздушного судна связаны с одним или большим количеством генераторов сигналов для системы 114 сигналов в соответствии с предпочтительным вариантом реализации.
В этих описанных примерах связь представляет собой физическую связь. Первый компонент, такой как одна из конструкций 112 воздушного судна, может быть рассмотрен как компонент, который связан со вторым компонентом, таким как генератор сигналов в системе 114 сигналов, путем скрепления со вторым компонентом, соединением посредством связующего со вторым компонентом, установки со вторым компонентом, сваривания со вторым компонентом, прикрепления ко второму компоненту и/или соединения со вторым компонентом некоторым другим подходящим образом. Первый компонент также может быть соединен со вторым компонентом с использованием третьего компонента. Первый компонент может также рассматриваться как компонент, который связан со вторым компонентом путем формирования в качестве части и/или расширения второго компонента.
Один или большее количество предпочтительных вариантов реализации могут быть реализованы в системе 114 сигналов. В этих иллюстративных примерах система 114 сигналов не основана на питаемых энергией передатчиках сигналов. Скорее система 114 сигналов может обеспечить возможность определения надводным кораблем 102, вертолетом 104 или ими обоими положения конструкций 112 воздушного судна в области 110 обломков.
Например, система 114 сигналов генерирует первые сигналы 116 в ответ на прием вторых сигналов 118 от надводного корабля 102. В другом примере первые сигналы 116 также могут быть сгенерированы в ответ на прием третьих сигналов 120 от вертолета 104.
В некоторых предпочтительных вариантах реализации система 114 сигналов также может содержать один или большее количество питаемых энергией передатчиков сигналов, таких как радиочастотный передатчик. В дополнение к генерированию первых сигналов 116 в ответ на прием вторых сигналов 118, система 114 сигналов может генерировать другие сигналы, такие как радиочастотные сигналы 122. Радиочастотные сигналы 122, передаваемые от радиочастотного передатчика 124 в системе 114 сигналов, могут быть приняты спутником 126 в данном иллюстративном примере.
Например, система 114 сигналов может генерировать радиочастотные сигналы 122, которые могут быть зарегистрированы спутником 126. Радиочастотные сигналы 122 могут определить положение, которое может обеспечить первоначальное положение конструкций 112 воздушного судна в области 110 обломков. Надводный корабль 102 и вертолет 104 могут использовать это исходное положение для более быстрого определения положения конструкций 112 воздушного судна в области 110 обломков.
На фиг. 2 показана структурная схема среды для определения положения воздушного судна в соответствии с предпочтительным вариантом реализации. Среда 100 для определения положения воздушного судна на фиг. 1 представляет собой пример одной реализации среды 200 для определения положения воздушного судна, показанной в блочной форме на фиг. 2.
В данном иллюстративном примере воздушное судно 202 может непреднамеренно столкнуться с рельефом 204 местности, который принимает форму водной среды 206 в иллюстративных примерах. Когда воздушное судно 202 непреднамеренно сталкивается с водной средой 206, это может привести к возникновению обломков 208. Обломки 208 могут быть расположены в области 210. Область 210 принимает форму области 212 обломков, когда представлены обломки 208. Обломки 208 могут содержать множество конструкций 214 воздушного судна.
В данном иллюстративном примере положение множества конструкций 214 воздушного судна может быть определено с использованием локационной системы 216 воздушного судна. Локационная система 216 воздушного судна содержит систему 218 сигналов и локационную систему 220 сигналов.
В этих иллюстративных примерах система 218 сигналов связана с множеством конструкций 214 воздушного судна. Как использовано в настоящей заявке, термин "множество", когда использован со ссылкой на объекты, означает один или большее количество объектов. Например, фраза "множество конструкций 214 воздушного судна" означает одну или большее количество конструкций воздушного судна.
Система 218 сигналов может быть связана с множеством конструкций 214 воздушного судна путем связи с одной или большим количеством конструкций воздушного судна в множестве конструкций 214 воздушного судна. Другими словами, система 218 сигналов не обязательно должна быть связана с каждой конструкцией воздушного судна в множестве конструкций 214 воздушного судна. В этих иллюстративных примерах система 218 сигналов содержит множество генераторов 222 сигналов.
Множество генераторов 222 сигналов может содержать множество различных типов генераторов сигналов. Например, множество генераторов 222 сигналов может содержать по меньшей мере множество генераторов 224 звука, множество радиочастотных (RF) генераторов 226, множество генераторов 228 световых сигналов и другие подходящие типы устройств для генерирования сигналов.
Как использовано в настоящей заявке, фраза "по меньшей мере один из", когда использована с перечнем объектов, означает, что могут быть использованы различные сочетания одного или большего количества перечисленных объектов, и только один из каждого объекта в перечне может быть необходим. Например, фраза "по меньшей мере один из объекта А, объекта В и объекта С" может означать, например, помимо прочего, объект А или объект А и объект В. Данный пример также может означать объект А, объект В и объект С, объект В и объект С, объект С или объект В.
В этих иллюстративных примерах связь множества генераторов 222 сигналов с множеством конструкций 214 воздушного судна выполнена таким образом, что множество генераторов 222 сигналов может работать после того, как воздушное судно 202 непреднамеренно сталкивается с водной средой 206.
В этих иллюстративных примерах множество генераторов 222 сигналов может быть связано с множеством конструкций 214 воздушного судна таким образом, что множество генераторов 222 сигналов может быть выполнено с возможностью противодействия усилию 230, возникающему от непреднамеренного столкновения с водной средой 206.
В этих иллюстративных примерах множество генераторов 222 сигналов может быть выполнено с возможностью противодействия усилию 230, возникающему более одного раза. В этих иллюстративных примерах усилие 230 может представлять собой, например, помимо прочего, динамическую нагрузку, составляющую приблизительно до 40g.
Кроме того, в этих иллюстративных примерах по меньшей мере один из множества генераторов 222 сигналов представляет собой пассивный генератор 232 сигналов. Пассивный генератор 232 сигналов может представлять собой один из множества генераторов 224 звука. По меньшей мере один из множества генераторов 222 сигналов также может содержать активный генератор 233 сигналов. Активный генератор 233 сигналов может представлять собой один из множества генераторов 226 радиочастотного сигнала или множество генераторов 228 световых сигналов и использовать энергию питания, такую как энергию питания от батареи или другого источника энергии, для обеспечения работы. Пассивный генератор 232 сигналов не требует энергии питания для обеспечения работы.
Когда первый сигнал 234 сгенерирован посредством множества генераторов 222 сигналов без использования энергии питания, пассивный генератор 232 сигналов может работать намного дольше, чем активный генератор 233 сигналов. Таким образом, вероятность нахождения множества конструкций 214 воздушного судна может увеличиться, даже если положение множества конструкций 214 воздушного судна не определено в течение определенного периода времени, такого как приблизительно 30 дней или приблизительно 60 дней.
При использовании пассивного генератора 232 сигналов, вероятность нахождения множества конструкций 214 воздушного судна увеличивается, поскольку пассивный генератор 232 сигналов может работать дольше, чем активный генератор 233 сигналов по тех пор, пока пассивный генератор 232 сигналов выдерживает усилие 230.
В этих иллюстративных примерах поиск множества конструкций 214 воздушного судна в области 212 обломков может осуществляться с использованием множества платформ 236 в локационной системе 216 воздушного судна. В этих примерах множество платформ 236 может представлять собой множество подвижных платформ. Локационная система 216 воздушного судна содержит множество платформ 236 и множество систем 238 поиска.
В этих иллюстративных примерах множество платформ 236 имеет множество систем 238 поиска, связанных с указанным множеством платформ 236. Множество систем 238 поиска выполнено с возможностью поиска множества генераторов 222 сигналов. Например, каждая из одной или большего количества из множества систем 238 поиска может содержать систему 240 звуковой локации, систему 242 радиочастотной локации, систему 246 оптической локации и/или другие типы систем поиска. В данном иллюстративном примере каждая платформа в множестве платформ 236 может содержать одну или большее количество систем поиска из множества систем 238 поиска.
В этих иллюстративных примерах система 240 звуковой локации генерирует второй сигнал 244. Множество генераторов 224 звука может генерировать первый сигнал 234, когда принят второй сигнал 244. В этих примерах первый сигнал 234 и второй сигнал 244 принимают форму звуковых сигналов. Звуковые сигналы могут быть также названы звуковыми волнами.
Другие генераторы сигналов могут быть использованы в дополнение к множеству генераторов 222 сигналов или вместе с ними для способствования в определении положения множества конструкций 214 воздушного судна. При использовании множества систем 238 поиска, множество платформ 236 может определять положение конструкции воздушного судна, связанной с генератором сигналов. Когда конструкция воздушного судна найдена, другие конструкции воздушного судна могут быть расположены достаточно близко к идентифицированному генератору сигналов, даже несмотря на то, что эти конструкции воздушного судна могут быть сами не связаны с генераторами сигналов.
На фиг. 3 показана структурная схема локационной системы воздушного судна в соответствии с предпочтительным вариантом реализации. В данном иллюстративном примере локационная система 300 воздушного судна представляет собой пример реализации локационной системы воздушного судна 216 по фиг. 2.
Как показано, локационная система 300 воздушного судна содержит систему 302 сигналов и локационную систему 304 сигналов. В данном иллюстративном примере система 302 сигналов содержит генераторы 306 звука. Генераторы 306 звука принимают форму пассивных генераторов 308 звука. Пассивные генераторы 308 звука не требуют источника питания для генерирования первых звуковых сигналов 310.
В данном иллюстративном примере пассивные генераторы 308 звука содержат первый акустический отражатель 312 и второй акустический отражатель 314. В этих иллюстративных примерах акустический отражатель представляет собой генератор звука, который генерирует первые звуковые сигналы 310 в ответ на прием вторых звуковых сигналов 316 от локационной системы 304 сигналов. Вторые звуковые сигналы 316 принимают форму импульсов звука 318. Определенный импульс звука в импульсах звука 318 может также называться "звуковой импульс". Первые звуковые сигналы 310 представляют собой ответы 320 на импульсы звука 318, сгенерированные первым акустическим отражателем 312 или вторым акустическим отражателем 314. В этих иллюстративных примерах ответы 320 могут называться "эхо-сигналами".
Как показано, первый акустический отражатель 312 может быть связан с первой конструкцией 322 воздушного судна. Второй акустический отражатель 314 может быть связан со второй конструкцией 324 воздушного судна. В этих иллюстративных примерах первая конструкция 322 воздушного судна и вторая конструкция 324 воздушного судна могут быть не соединены друг с другом в области обломков. Например, первая конструкция 322 воздушного судна может представлять собой крыло 326. Вторая конструкция 324 воздушного судна может представлять собой записывающее устройство 328 для записи данных.
В этих иллюстративных примерах первый акустический отражатель 312 может генерировать первую часть 330 первых звуковых сигналов 310 с первой частотой 332. Второй акустический отражатель 314 генерирует вторую часть 334 первых звуковых сигналов 310, имеющих вторую частоту 336. В этих иллюстративных примерах первая частота 332 может быть отлична от второй частоты 336.
В частности, первая частота 332 может быть меньше, чем вторая частота 336. При более низкой частоте, первая часть 330 первых звуковых сигналов 310 совершает перемещение дальше, чем вторая часть 334 первых звуковых сигналов 310.
Кроме того, в этих иллюстративных примерах, первый акустический отражатель 312 генерирует первую часть 330 первых звуковых сигналов 310 при приеме первой части 338 вторых звуковых сигналов 316, имеющих первую частоту 332. Второй акустический отражатель 314 генерирует вторую часть 334 первых звуковых сигналов 310 в ответ на прием второй части 340 вторых звуковых сигналов 316, имеющих вторую частоту 336. Другими словами, поскольку первый акустический отражатель 312 и второй акустический отражатель 314 представляют собой пассивные генераторы звука, то эти акустические отражатели реагируют на сигналы с использованием той же самой частоты, как на сигналы, которые были приняты.
При использовании первого акустического отражателя 312 и второго акустического отражателя 314, конкретные конструкции могут быть идентифицированы на основании выбора конкретной частоты. Например, крыло 326 может быть идентифицировано отдельно от записывающего устройства 328 для записи данных на основании частоты, выбранной во вторых звуковых сигналах 316.
Кроме того, использование различных частот может быть применено для идентификации определенных конструкций воздушного судна до идентификации других конструкций воздушного судна. Например, крыло 326 может открепиться из различных предпочтительных вариантов реализации воздушного судна дальше от области обломков, чем записывающее устройство 328 для записи данных.
В этих иллюстративных примерах первый акустический отражатель 312 может иметь первый размер 342, а второй акустический отражатель 314 может иметь второй размер 344. В этих иллюстративных примерах первый размер 342 больше, чем второй размер 344, когда первая частота 332 меньше, чем вторая частота 336. В итоге, первый размер 342 может быть проще связан с крылом 326, чем записывающее устройство 328 для записи данных.
В итоге, определение положения первого акустического отражателя 312 с первый размером 342 крыла 326 может привести к нахождению сначала крыла 326. Как только конструкция воздушного судна, такая как крыло 326, найдена в области обломков, локационная система воздушного судна может использовать часть конструкции воздушного для определения положения других конструкций воздушного судна в области обломков. Например, когда найдено крыло 326, вторая частота 336 может быть использована для нахождения положения второго акустического отражателя 314, связанного с записывающим устройством 328 для записи данных.
В этих иллюстративных примерах локационная система 304 сигналов может содержать систему 346 звуковой локации. Система 346 звуковой локации может быть выполнена с возможностью генерирования вторых звуковых сигналов 316, использующих диапазон частот, включающий первую частоту 332 и вторую частоту 336. В иллюстративных примерах диапазоны, в которых могут быть зарегистрированы первая частота 332 и вторая частота 336, выполнены различными. Например, первые звуковые сигналы 310 с первой частотой 332 могут иметь больший диапазон, чем у вторых звуковых сигналов 316 со второй частотой 336.
Локационная система 304 сигналов содержит систему 346 звуковой локации и платформу 348. Система 346 звуковой локации связана с платформой 348. Платформа 348 может принимать различные формы. Например, помимо прочего, платформа 348 может представлять собой надводный корабль, подводную лодку, беспилотное подводное транспортное средство (UUV), вертолет, баржу или некоторый другой подходящий тип платформы. В этих иллюстративных примерах система 346 звуковой локации представляет собой систему звуковой эхолокации. Система 346 звуковой локации выполнена с возможностью передачи вторых звуковых сигналов 316 с частотами 350. Как показано, частоты 350 содержат первую частоту 332 и вторую частоту 336. Таким образом, система 346 звуковой локации может выборочно передавать первую часть 338 и вторую часть 340 во вторых звуковых сигналах 316 для выполнения поиска крыла 326 и записывающего устройства 328 для записи данных.
Изображение локационной системы воздушного судна 300 на фиг. 3 не предназначено для ограничения способа, которым могут быть реализованы другие предпочтительные варианты реализации. Например, в других реализациях пассивные генераторы 308 звука могут содержать только один акустический отражатель или могут содержать другой или большее количество акустических отражателей вместо двух акустических отражателей, как описано.
На фиг. 4 в блочной форме показана система сигналов в соответствии с предпочтительным вариантом реализации. Система 400 сигналов представляет собой пример реализации системы 218 сигналов в множестве генераторов 222 сигналов по фиг. 2. В данном иллюстративном примере система 400 сигналов содержит акустический отражатель 402, конструкцию 404 воздушного судна и систему 406 сохранения рабочего состояния.
В данном иллюстративном примере акустический отражатель 402 может быть выполнен с возможностью его удерживания в полости 408 в конструкции 404 воздушного судна. Конструкция 404 воздушного судна представляет собой конструкцию, выполненную с возможностью использования воздушного судна 202 по фиг. 2. Конструкция 404 воздушного судна может быть соединена с другой конструкцией воздушного судна или расположена в конструкции воздушного судна в воздушном судне 202 на фиг. 2.
Система 406 сохранения рабочего состояния выполнена с возможностью защиты акустического отражателя 402 от усилия 410, которое может быть приложено к конструкции 404 воздушного судна в ответ на непреднамеренное столкновение воздушного судна с водной средой, в которой расположена система 400 сигналов. Система 406 сохранения рабочего состояния может уменьшить усилие 410, приложенное к конструкции 404 воздушного судна, от приложения к акустическому отражателю 402
В этих иллюстративных примерах система 406 сохранения рабочего состояния может содержать часть или всю конструкцию 404 воздушного судна согласно иллюстративным примерам. Система 406 сохранения рабочего состояния может быть выполнена с возможностью обеспечения возможности выдерживания акустическим отражателем 402 усилия, возникающего от непреднамеренного столкновения воздушного судна с водной средой. Другими словами, по меньшей мере одна из конструкции 404 воздушного судна и системы 406 сохранения рабочего состояния может уменьшить усилие, прикладываемое акустическим отражателем 402 в результате столкновения воздушного судна с водной средой. В этих иллюстративных примерах система 406 сохранения рабочего состояния может содержать конструкцию 404 воздушного судна или может представлять собой отдельный компонент от конструкции 404 воздушного судна.
Система 406 сохранения рабочего состояния может быть выполнена с возможностью защиты акустического отражателя 402 от усилия 410, имеющего динамическую нагрузку, составляющую приблизительно до 40g. Конечно, система 406 сохранения рабочего состояния может быть выполнена с возможностью защиты акустического отражателя 402 от усилия 410, имеющего большие значения динамической нагрузки в зависимости от конкретной реализации.
Как показано, конструкция 404 воздушного судна может содержать множество каналов 412. Множество каналов 412 соединяет внешнюю часть конструкции 404 воздушного судна с полостью 408. Множество каналов 412 может обеспечивать возможность попадания воды в полость 408 в конструкции 404 воздушного судна. Таким образом, акустический отражатель 402 может по меньшей мере частично погружен в воду, когда конструкция 404 воздушного судна расположена под водой. Кроме того, система 406 сохранения рабочего состояния также выполнена с возможностью обеспечения достижения водой акустического отражателя 402. В этих иллюстративных примерах конструкция 404 воздушного судна и система 406 сохранения рабочего состояния могут быть образованы из материалов, которые препятствуют передаче звуковых волн. Другими словами, конструкция 404 воздушного судна и/или система 406 сохранения рабочего состояния могут не уменьшать амплитуду или не искажать звуковые волны, которые могут проходить через эти компоненты к акустическому отражателю 402 и от него.
В некоторых иллюстративных примерах конструкция 404 воздушного судна может содержать отверстие 414. Отверстие 414 может быть использовано в дополнение к множеству каналов 412 и/или вместо них. Отверстие 414 выполнено с обеспечением возможности выхода акустического отражателя 402 из полости 408 в конструкции 404 воздушного судна.
В этих иллюстративных примерах удерживающая система 416 может соединять акустический отражатель 402 с конструкцией 404 воздушного судна. Удерживающая система 416 может предотвращать выход акустического отражателя 402 из полости 408 через отверстие 414 после того, как конструкция 404 воздушного судна стала погружаться в воду.
Удерживающая система 416 может принимать множество различных форм. Например, помимо прочего, удерживающая система 416 может быть выполнена с возможностью соединения акустического отражателя 402 с конструкцией 404 воздушного судна. В другом примере кабель может содержать сетку или арматурную сетку, которая удерживает акустический отражатель 402 с использованием арматурной сетки, соединяемой с конструкцией 404 воздушного судна. Удерживающая система 416 может быть выполнена из материала, такого как, помимо прочего, нейлон, арамидное синтетическое волокно, стальной трос, синтетический канат, авиационный трос, трос в уретановых мотках, или других подходящих типов материалов.
Кроме того, в некоторых иллюстративных примерах удерживающая система 416 может содержать подвижную конструкцию 418. Как показано, подвижная конструкция 418 может выборочно закрывать или открывать отверстие 414. Подвижная конструкция 418 может представлять собой, например, дверь, ирисовую диафрагму или некоторую другую конструкцию, которая может выборочно закрывать или открывать отверстие 414.
Еще в одном иллюстративном варианте управляющие средства 420 могут управлять перемещением подвижной конструкции 418. Например, управляющие средства 420 могут представлять собой основанные на давлении средства, которые перемещают подвижную конструкцию 418 для открытия отверстия 414, когда выбранное значение давления регистрируют посредством управляющих средств 420. В другом примере управляющие средства 420 могут перемещать подвижную конструкцию 418 после определенного периода времени после регистрации выбранной величины давления.
Еще в одном иллюстративном примере система 400 сигналов также может содержать генератор 424 радиочастотных сигналов. Генератор 424 радиочастотных сигналов может представлять собой другой акустический отражатель или может представлять собой другой тип генерирующей системы для генерирования сигналов. В одном иллюстративном примере генератор 424 радиочастотных сигналов может представлять собой один из множества генераторов 226 радиочастотных сигналов по фиг. 2.
Кроме того, в этих иллюстративных примерах датчик 428 и управляющее устройство 430 могут быть использованы с генератором 424 радиочастотного сигнала. Датчик 428 может быть выполнен с возможностью регистрации сигналов 432, сгенерированных акустическим отражателем 402 на выбранной частоте 434.
Если сигналы 432 зарегистрированы, то управляющее устройство 430 может затем привести в действие генератор 424 радиочастотного сигнала. В этих иллюстративных примерах генератор 424 радиочастотного сигнала генерирует сигналы 436 на множестве частот 438. Множество частот 438 может представлять собой одну частоту, множество частот или диапазон спектра частот. В этих иллюстративных примерах множество частот 438 может представлять собой частоты, используемые для радиопередач, спутниковых передач или других подходящих типов передач.
Управляющее устройство 430 может привести в действие генератор 424 радиочастотного сигнала в течение периода времени 440. После прохождения периода времени 440, управляющее устройство 430 может выключить генератор 424 радиочастотного сигнала. Если сигналы 432 зарегистрированы снова перед истечением периода времени 440, то управляющее устройство 430 сбрасывает период времени 440. Другими словами, если период времени 440 составляет приблизительно одну минуту, а сигналы 432 зарегистрированы после того, как период времени 440 начался, то период времени 440 снова устанавливают приблизительно в одну минуту. В иллюстративных примерах период времени 440 может быть выбран для увеличения времени работы генератора сигналов, такого как генератор 424 радиочастотных сигналов.
В этих иллюстративных примерах генератор 424 радиочастотных сигналов также может содержать удерживающую систему 442. Удерживающая система 442 может соединять генератор 424 радиочастотного сигнала с конструкцией 404 воздушного судна. В некоторых иллюстративных примерах удерживающая система 442 может также содержать систему 444 для обеспечения плавучести. Система 444 для обеспечения плавучести может быть выполнена с возможностью открепления от конструкции 404 воздушного судна и с возможностью переноса генератора 424 радиочастотного сигнала по направлению к поверхности воды. В некоторых случаях система 444 для обеспечения плавучести может достигать поверхность воды в зависимости от глубины, на которой расположена конструкция 404 воздушного судна 404.
Еще в одних иллюстративных примерах генератор 424 радиочастотного сигнала также может принимать форму генератора световых сигналов. Кроме того, дополнительные генераторы сигналов также могут быть представлены в конструкции 404 воздушного судна.
Еще в одних иллюстративных примерах система 400 сигналов может принимать форму модуля 446. Модуль 446 может быть выполнен с возможностью размещения в полости 448 в воздушном судне 450. Например, модуль 446 может быть размещен в полости в части фюзеляжа, крыле, корпусе двигателя, двери, опоре, полу или некоторой другой части воздушного судна 450. В этих иллюстративных примерах модуль 446 может быть выполнен с возможностью расположения заподлицо с другими компонентами, такими как обшивка воздушного судна 450, когда установлен в полости 448 в воздушном судне 450.
На фиг. 5 показана система звуковой локации в соответствии с предпочтительным вариантом реализации. Система 500 звуковой локации представляет собой пример одной реализации системы 240 звуковой локации по фиг. 2.
Как показано, система 500 звуковой локации содержит передатчик 502, приемник 504 и управляющее устройство 506. Передатчик 502 выполнен с возможностью генерирования сигналов 508. Сигналы 508 могут принимать форму луча 510 в зависимости от конкретной реализации. В данном примере сигналы 508 представляют собой звуковые сигналы. Приемник 504 выполнен с возможностью приема ответов 512. Ответы 512 представляют собой звуковые сигналы, сгенерированные в ответ на передачу сигналов 508.
Управляющее устройство 506 выполнено с возможностью управления работой передатчика 502 и приемника 504. Кроме того, управляющее устройство 506 может содержать локатор 514. Локатор 514 выполнен с возможностью идентификации положения конструкции воздушного судна на основании ответов 512. В этих иллюстративных примерах локатор 514 и управляющее устройство 506 могут быть реализованы с использованием аппаратного обеспечения, программного обеспечения или их сочетания.
На фиг. 6 показан акустический отражатель в соответствии с предпочтительным вариантом реализации. Акустический отражатель 600 представляет собой пример реализации генератора звука в множестве генераторов 224 звука по фиг. 2. Акустический отражатель 600 также может быть использован для реализации первого акустического отражателя 312 и второго акустического отражателя 314 по фиг. 3.
В этих иллюстративных примерах акустический отражатель 600 имеет тип 601. Тип 601 может принимать различные формы. Например, помимо прочего, тип 601 может представлять собой обычный угловой отражатель, световозвращатель, акустическое зеркало и/или другой подходящий тип акустического отражателя. В данном иллюстративном примере тип 601 может представлять собой сферу 602, цилиндр 604 или трехплоскостной отражатель (606).
В данном иллюстративном примере сфера 602 может иметь внешнюю часть 608 с внутренней частью 610. Внешняя часть 608 окружает внутреннюю часть 610 и представляет собой оболочку сферы 602. В данном иллюстративном примере внутренняя часть 610 представляет собой сердцевину сферы 602. Когда внутренняя часть 610 представляет собой текучую среду, сфера 602 представляет собой заполненную текучей средой сферу 612. Когда внутренняя часть 610 выполнена твердой, сфера 602 представляет собой сферу с твердым заполнителем 614. Сфера 614 с твердым заполнителем может быть выполнена с возможностью учета выравнивания давления для подводных условий.
Сфера 602 может принимать звуковые сигналы и увеличивать амплитуду ответа относительно принятых звуковых сигналов. Цилиндр 604 также имеет внешнюю часть 616 и внутреннюю часть 618. Внутренняя часть 618 также может быть выполнена твердой или жидкой. Трехплоскостной отражатель 606 может содержать первую плоскость 620, вторую плоскость 622 и третью плоскость 624. Эти плоскости могут быть расположены перпендикулярно друг другу.
Акустический отражатель 600 также имеет множество частот 626. Множество частот 626 представляет собой одну или большее количество частот, при которых акустический отражатель 600 будет генерировать ответ 628. Например, если акустический отражатель 600 выполнен для приблизительно 450 кГц, то акустический отражатель 600 будет генерировать ответ 628, когда сигнал 630 принят акустическим отражателем 600. В этих иллюстративных примерах ответ 628 и сигнал 630 имеют ту же самую частоту. В некоторых случаях акустический отражатель 600 может генерировать ответ на более одной частоте. Множество частот 626 может представлять собой индивидуальные частоты с другими частотами, расположенными между диапазонами, полосы частот или их некоторое сочетание. В этих иллюстративных примерах множество частот 626 может представлять собой диапазон от 50 кГц до приблизительно 900 кГц.
Акустический отражатель 600 также имеет размер 632. Размер 632 может изменяться в зависимости от частот, выбранных для акустического отражателя 600. Например, когда акустический отражатель 600 принимает форму сферы 602, то сфера 602 может иметь диаметр, составляющий приблизительно 100 мм, когда сфера 602 выбрана для реагирования на сигнал 630 на частоте в множестве частот 626, составляющей 450 кГц. В качестве другого примера, в котором сфера 602 выбрана для реагирования на сигнал 630 на частоте в множестве частот 626, сфера 602 может иметь размер, составляющий приблизительно 200 мм в диаметре.
На фиг. 7 показана структурная схема системы сохранения рабочего состояния в соответствии с предпочтительным вариантом реализации. Система 700 сохранения рабочего состояния представляет собой пример реализации системы 406 сохранения рабочего состояния по фиг. 4.
В данном иллюстративном примере система 700 сохранения рабочего состояния может содержать множество различных компонентов. Например, система 700 сохранения рабочего состояния может содержать конструкцию 702 воздушного судна. Конструкция 702 воздушного судна может иметь полость 704, в которой может быть размещен акустический отражатель.
Конструкция 702 воздушного судна может быть выполнена с возможностью обеспечения защиты от усилия, которое может возникать, когда конструкция 702 воздушного судна непреднамеренно сталкивается с водной средой. Конструкция 702 воздушного судна может быть образована из различных материалов. Например, конструкция 702 воздушного судна может содержать материал, выбранный по меньшей мере из композитного материала, металла, алюминия, титана, пластмассы и/или других подходящих материалов.
Система 700 сохранения рабочего состояния также может содержать другие компоненты, такие как пеноматериал 706, несущие элементы 708, заполненные текучей средой сферы 712 и другие подходящие компоненты. Эти компоненты могут быть размещены в полости 704 конструкции 702 воздушного судна и могут обеспечивать дополнительную защиту от усилия, которое может возникать при непреднамеренном столкновении с водной средой.
Пеноматериал 706 может быть выполнен с возможностью окружения акустического отражателя в полости 704. Пеноматериал 706 может содержать материал, выбранный по меньшей мере из полиуретана с открытыми ячейками или закрытыми ячейками, аэрогеля, керамики, пенорезины, полистерола, пенополистерола, синактического пеноматериала, интегрированного в обшивку пеноматериала, баллистического пениматериала и/или других подходящих типов материала. В зависимости от варианта реализации, пеноматериал 706 может быть выбран таким образом, что акустический отражатель будет окружен водой.
В одном предпочтительном варианте реализации, когда акустический отражатель выполнен с возможностью выхода из полости в конструкции воздушного судна в окружающую водную среду, пеноматериал может представлять собой пеноматериал, не имеющий пор. В предпочтительном варианте реализации, в котором акустический отражатель выполнен с возможностью его удерживания в конструкции воздушного судна, пеноматериал может обеспечивать возможность протекания воды в полость для достижения акустического отражателя.
Несущие элементы 708 могут быть соединены с акустическим отражателем, пеноматериалом, удерживающей системой или другим компонентом системы 700 сохранения рабочего состояния и стенкой 714 в полости 704 конструкции 702 воздушного судна. Данное соединение может удерживать акустический отражатель в полости 704. Эти несущие элементы могут быть выполнены эластичными, гибкими или с сочетанием этих двух свойств.
Заполненные жидкостью сферы 712 могут быть размещены в полости 704 с акустическим отражателем. Заполненные жидкостью сферы 712 могут быть выполнены с возможностью размещения между акустическим отражателем и стенкой 714 полости 704 в конструкции 702 воздушного судна.
Изображение сред для определения положения воздушного судна и компонентов, использованных для определения положения конструкций воздушного судна, показанных в блочной форме на фиг. 2-7, не подразумевает введение физических или архитектурных ограничений в способ, которым может быть реализован предпочтительный вариант реализации. Другие компоненты могут быть использованы в дополнение к показанным компонентам и/или вместо них. Некоторые компоненты могут не быть необходимы. Кроме того, блоки приведены для иллюстрации некоторых функциональных компонентов. Один или большее количество этих блоков могут быть объединены и/или разделены на различные блоки при реализации в предпочтительном варианте реализации.
Например, крыло 326 и записывающее устройство 328 для записи данных представляют собой примеры конструкций воздушного судна, описанных выше согласно чертежам. Различные предпочтительные варианты реализации могут быть применены к другим конструкциям воздушного судна в дополнение к ним. Например, различные предпочтительные варианты реализации могут быть применены к конструкциям воздушного судна, таким как горизонтальный стабилизатор, хвостовой отсек, корпус двигателя, воздушное судно, дверь, элерон, предкрылок и другие подходящие типы конструкций воздушных судов. Еще в одних иллюстративных примерах множество систем 238 поиска может содержать только единственный тип системы поиска, а не множество систем поиска.
Различные компоненты, показанные на фиг. 1 и фиг. 8-22, могут быть объединены с компонентами по фиг. 1-4, использованы с компонентами на фиг. 1-4 или их сочетание. Кроме того, некоторые из этих компонентов на этих чертежах могут представлять собой иллюстративные примеры того, как компоненты, показанные в блочной форме на фиг. 1-4, могут быть реализованы в качестве физических конструкций.
На фиг. 8 показано воздушное судно, в котором может быть реализован предпочтительный вариант реализации. В этом описанном примере воздушное судно 800 содержит крыло 802 и крыло 804, прикрепленные к фюзеляжу 806. Воздушное судно 800 также содержит двигатель 808, двигатель 810 и хвостовую часть 812.
В этих иллюстративных примерах воздушное судно 800 представляет собой пример реализации воздушного судна 202, показанного в блочной форме на фиг. 2. Как показано, локационная система 814 воздушного судна может быть реализована с использованием локационной системы 300 воздушного судна по фиг. 3. В данном иллюстративном примере локационная система 814 воздушного судна может содержать генератор 816 сигналов, генератор 818 сигналов, генератор 820 сигналов и генератор 822 сигналов. Как можно увидеть, генератор 816 сигналов расположен в месте 825 по направлению к носовой части 824 воздушного судна 800. Генератор 818 сигналов расположен в положении 826 в двигателе 808. Генератор 820 сигналов расположен в положении 828 в крыле 804. Генератор 822 сигналов расположен в положении 830 в хвостовой части 812.
Изображение положения генераторов сигналов на фиг. 8 не означает введение ограничений для положений, в которых могут быть размещены генераторы сигналов, или для множества генераторов сигналов, которые могут быть использованы для воздушного судна. Например, другое воздушное судно может иметь дополнительные генераторы сигналов в дополнение к тем, которые показаны на фиг. 8, и/или вместо них. Эти генераторы сигналов могут быть размещены на горизонтальном стабилизаторе, вертикальном стабилизаторе, на двери, в багажном отделении в воздушном судне, на полу в воздушном судне, углублены в пол воздушного судна и могут иметь другие подходящие положения.
На фиг. 9 показана часть воздушного судна 800 в соответствии с предпочтительным вариантом реализации. В данном иллюстративном примере хвостовая часть 812 видна на более подробном виде. Как показано, генератор 822 сигналов принимает форму модуля 902. В этих иллюстративных примерах модуль 902 представляет собой пример реализации модуля 446, показанного в блочной форме на фиг. 4.
Как показано, конструкция 900 воздушного судна для модуля 902 может быть размещена в полости 904 в хвостовой части 812. При размещении в полости 904, поверхность 906 может быть выполнена по существу ровной или гладкой по отношению к поверхности 908 хвостовой части 812. В этих иллюстративных примерах один или большее количество генераторов сигналов могут быть выполнены в модуле 902.
В некоторых иллюстративных примерах, поверхность 906 может формировать часть поверхности хвостовой части 812. В данном иллюстративном примере подвижная конструкция 910 на поверхности 906 может закрывать отверстие (не показано) в модуле 902.
На фиг. 10 показано более подробное изображение генератора сигналов в соответствии с предпочтительным вариантом реализации. В данном иллюстративном примере более подробный вид хвостовой части 812 с модулем 902, установленным в полости 904 и в развернутой конфигурации в водной среде 1000, виден на перспективном виде.
В данном иллюстративном примере генератор 822 сигналов показан в развернутой конфигурации. В данной конфигурации подвижная конструкция 910 перемещена для обеспечения возможности выхода акустического отражателя 1001 из полости 1002 в водную среду 1000. Акустический отражатель 1001 может быть соединен с модулем 902 посредством связывающего троса 1004, который представляет собой часть удерживающей системы в этих иллюстративных примерах. Подвижная конструкция 910 также представляет собой часть удерживающей системы.
Кроме того, модуль 902 также содержит генератор 1006 радиочастотного сигнала. Генератор 1006 радиочастотного сигнала может содержать систему для обеспечения плавучести, которая обеспечивает возможность выхода генератора 1006 радиочастотного сигнала из полости 1002 в водную среду 1000. В данном иллюстративном примере удерживающая система генератора 1006 радиочастотного сигнала содержит связывающий трос 1008. Как показано, генератор 1006 радиочастотного сигнала также показан в развернутой конфигурации за пределами модуля 902.
В некоторых иллюстративных примерах акустический отражатель 1001 и генератор 1006 радиочастотного сигнала могут быть размещены в различных полостях в модуле 902, таких как полость 1002.
Как показано, подвижная конструкция 910 может совершать перемещение в открытое положение, когда зарегистрировано выбранное значение давления. Давление может быть выбрано для конкретной глубины в воде, когда должно возникнуть определение положения акустического отражателя 1001 и генератора 1006 радиочастотного сигнала.
На фиг. 11 показан модуль в соответствии с предпочтительным вариантом реализации. В данном иллюстративном примере показан открытый вид модуля 1100. В данном иллюстративном примере модуль 1100 представляет собой пример реализации модуля 446 по фиг. 4. В частности, модуль 1100 представляет собой пример одной реализации модуля 902 по фиг. 9. Модуль 1100 показан в неразвернутой конфигурации. Модуль 1100 может быть реализован в различных положениях воздушного судна, таких как одно из положений 825, 826, 828 и 830 воздушного судна 800 по фиг. 8.
В данном иллюстративном примере модуль 1100 содержит конструкцию 1102 воздушного судна, акустический отражатель 1104, генератор 1106 радиочастотного сигнала и пеноматериал 1108. В данном иллюстративном примере акустический отражатель 1104 расположен в полости 1110. Генератор 1106 радиочастотного сигнала расположен в полости 1112. Полость 1110 отделена от полости 1112 в конструкции 1102 воздушного судна посредством стенки 1114.
Конструкции 1102 воздушного судна имеет отверстие 1116 к полости 1110 и отверстие 1118 к полости 1112. Подвижная конструкция 1120 закрывает отверстие 1116. Подвижная конструкция 1122 закрывает отверстие 1118. Связывающий трос 1124, сетка 1126 и связывающий трос 1128 формируют удерживающую систему акустического отражателя 1104 и генератора 1106 радиочастотного сигнала. Сетка 1126 удерживает акустический отражатель 1104. Связывающий трос 1124 соединяет сетку 1126 с конструкцией 1102 воздушного судна. Связывающий трос 1128 соединяет генератор 1106 радиочастотного сигнала с конструкцией 1102 воздушного судна.
Пеноматериал 1108 расположен в полости 1110 и полости 1112. Пеноматериал 1108 представляет собой систему сохранения рабочего состояния акустического отражателя 1104 и генератора 1106 радиочастотного сигнала. Пеноматериал 1108 выполнен с возможностью защиты этих компонентов от усилий, которые могут возникнуть в ответ на непреднамеренное столкновение с водной средой.
На фиг. 12 показан модуль в развернутой конфигурации в соответствии с предпочтительным вариантом реализации. В данном иллюстративном примере подвижная конструкция 1120 и подвижная конструкция 1122 перемещены для открытия соответственно отверстия 1116 и отверстия 1118. Акустический отражатель 1104 совершил перемещение за пределы конструкции 1102 воздушного судна. Кроме того, генератор 1106 радиочастотного сигнала также совершил перемещение за пределы конструкции 1102 воздушного судна.
В этих иллюстративных примерах подвижная конструкция 1120 и подвижная конструкция 1122 могут совершать перемещение в различные моменты времени. Например, подвижная конструкция 1120 может быть выполнена с возможностью перемещения, когда достигнуто выбранное давление на конструкции 1102 воздушного судна. Подвижная конструкция 1122 может быть выполнена с возможностью перемещения, когда после достижения выбранного давления прошел определенный период времени.
На фиг. 13 показан модуль в соответствии с предпочтительным вариантом реализации. В данном иллюстративном примере показан открытый вид модуля 1300. В данном иллюстративном примере модуль 1300 представляет собой пример реализации модуля 446 по фиг. 4. В частности, модуль 1300 представляет собой пример другой реализации модуля 902 по фиг. 9. Модуль 1300 показан в неразвернутой конфигурации. Модуль 1300 может быть реализован в различных положениях воздушного судна, таких как одно из положений 825, 826, 828 и 830 воздушного судна 800 по фиг. 8.
В данном иллюстративном примере модуль 1300 содержит конструкцию 1302 воздушного судна, акустический отражатель 1304, генератор 1306 радиочастотного сигнала и пеноматериал 1308. В данном иллюстративном примере акустический отражатель 1304 и генератор 1306 радиочастотного сигнала расположены в полости 1310.
Конструкция 1302 воздушного судна имеет отверстие 1312 к полости 1310. Подвижная конструкция 1314 закрывает отверстие 1312. Связывающий трос 1318, сетка 1320 и связывающий трос 1322 формируют удерживающую систему акустического отражателя 1304 и генератора 1306 радиочастотного сигнала. Сетка 1320 удерживает акустический отражатель 1304. Связывающий трос 1318 соединяет сетку 1320 с конструкцией 1302 воздушного судна. Связывающий трос 1322 соединяет генератор 1306 радиочастотного сигнала с конструкцией 1302 воздушного судна.
Пеноматериал 1308 расположен в полости 1310. Пеноматериал 1308 представляет собой систему сохранения рабочего состояния акустического отражателя 1304 и генератора 1306 радиочастотного сигнала.
На фиг. 14 показан модуль в неразвернутой конфигурации в соответствии с предпочтительным вариантом реализации. В данном иллюстративном примере показан открытый вид модуля 1400. В данном иллюстративном примере модуль 1400 представляет собой пример реализации модуля 446 по фиг. 4. Модуль 1400 может быть реализован в различных положениях воздушного судна, таких как одно из положений 825, 826, 828 и 830 воздушного судна 800 по фиг. 8.
Модуль 1400 показан в неразвернутой конфигурации. В данном иллюстративном примере конструкция 1401 воздушного судна модуля 1400 может иметь отверстие 1402 с подвижной конструкцией 1404. Подвижная конструкция 1404 может совершать перемещение для открытия отверстия 1402 таким образом, что акустический отражатель 1406 может выходить из модуля 1400 через отверстие 1402 в конструкции 1401 воздушного судна. В данном иллюстративном примере подвижная конструкция 1404 может совершать поворот вокруг оси 1407. В других иллюстративных примерах подвижная конструкция 1404 может стать открепленной от модуля 1400. Как показано на данном открытом виде, акустический отражатель 1406 расположен в полости 1410 в конструкции 1401 воздушного судна.
Когда подвижная конструкция 1404 перемещена для открытия отверстия 1402, акустический отражатель 1406 может совершать перемещение через отверстие 1402 за пределы конструкции 1401 воздушного судна. Как показано, акустический отражатель 1406 может быть соединен с модулем 1400 с использованием связывающего троса 1412 и арматурной сетки 1414. Эти компоненты представляют собой часть удерживающей системы акустического отражателя 1406.
Арматурная сетка 1414 может удерживать акустический отражатель 1406. Связывающий трос 1412 может соединять арматурную сетку 1414 с конструкцией 1401 воздушного судна модуля 1400. Таким образом, акустический отражатель 1406 может быть выпущен из модуля 1400, однако может быть удержан на необходимом расстоянии с использованием связывающего троса 1412.
В данном иллюстративном примере модуль 1400 также может содержать систему сохранения рабочего состояния в форме пеноматериала 1416. Пеноматериал 1416 расположен в полости 1410 и может обеспечивать защиту акустического отражателя 1406 от усилия, возникающего от непреднамеренного столкновения с водной средой.
На фиг. 15 показан модуль в развернутой конфигурации в соответствии с предпочтительным вариантом реализации. В данном иллюстративном примере модуль 1400 показан в развернутой конфигурации. В данной развернутой конфигурации акустический отражатель 1406 показан за пределами конструкции 1401 воздушного судна.
На фиг. 16 показан модуль в неразвернутой конфигурации в соответствии с предпочтительным вариантом реализации. Открытый вид модуля 1600 показан на фиг. 16. В данном иллюстративном примере модуль 1600 представляет собой пример реализации модуля 446 по фиг. 4. Модуль 1600 показан в неразвернутой конфигурации. Модуль 1600 может быть реализован в различных положениях воздушного судна, таких как одно из положений 825, 826, 828 и 830 воздушного судна 800 по фиг. 8.
В данном иллюстративном примере модуль 1600 содержит конструкцию 1602 воздушного судна, акустический отражатель 1604, арматурную сетку 1606, связывающий трос 1608 и пеноматериал 1610. В данном иллюстративном примере конструкция 1602 воздушного судна может быть образована из двух частей, а именно части 1612 и части 1614. Эти части могут стать разделенными, когда акустический отражатель 1604 в модуле 1600 должен быть развернут.
Пеноматериал 1610 заполняет полость 1616 в конструкции 1602 воздушного судна. Пеноматериал 1610 представляет собой часть системы сохранения рабочего состояния акустического отражателя 1604. Как показано, пеноматериал 1610 содержит объем 1618, в котором расположен акустический отражатель 1604. Пеноматериал 1610 может быть выбран из материала, который выполнен с возможностью уменьшения усилий, которые могут быть приложены к акустическому отражателю 1604.
Арматурная сетка 1606 может охватывать акустический отражатель 1604. Связывающий трос 1608 соединяет арматурную сетку 1606 с частью 1614 конструкции 1602 воздушного судна.
На фиг. 17 показан модуль в развернутой конфигурации в соответствии с предпочтительным вариантом реализации. В этом описанном примере часть 1614 и часть 1612 конструкции 1602 воздушного судна стали отделены друг от друга. Акустический отражатель 1604 может плыть по направлению вверх. Акустический отражатель 1604 может оставаться в пределах выбранного расстояния от части 1614 посредством связывающего троса 1608.
На фиг. 18 показан модуль в соответствии с предпочтительным вариантом реализации. В данном иллюстративном примере показан открытый вид модуля 1800. В данном иллюстративном примере модуль 1800 представляет собой пример реализации модуля 446 по фиг. 4. Модуль 1800 показан в неразвернутой конфигурации. Модуль 1800 могут быть реализован в различных положениях воздушного судна, таких как одно из положений 825, 826, 828 и 830 воздушного судна 800 по фиг. 8.
Модуль 1800 содержит конструкцию 1802 воздушного судна, акустический отражатель 1804, связывающий трос 1806 и уплотнительные элементы 1808. Уплотнительные элементы 1808 могут представлять собой, например, по меньшей мере одну из наполненных воздухом подушек из полиреутана, наполненных гелем подушек из полиреутана, промышленного уплотнительного материала и других подходящих типов уплотнительных элементов. Уплотнительные элементы могут быть выбраны на основании возможности уменьшения усилия, которое приложено к акустическому отражателю 1804 в результате непреднамеренного столкновения с водной средой. Уплотнительные элементы 1808 могут быть выбраны таким образом, что акустический отражатель 1804 может работать после того, как возникает непреднамеренное столкновение с водной средой.
Акустический отражатель 1804 расположен в полости 1810 в конструкции 1802 воздушного судна. Подвижная конструкция 1812 закрывает отверстие 1814 в конструкции 1802 воздушного судна. Подвижная конструкция 1812 может быть перемещена для открытия отверстия 1814 с обеспечением возможности перемещения акустического отражателя 1804 из конструкции 1802 воздушного судна.
Уплотнительные элементы 1808 также расположены в полости 1810. Уплотнительные элементы 1808 могут принимать форму шариков или сфер. Уплотнительные элементы 1808 представляют собой часть системы сохранения рабочего состояния для уменьшения усилия, приложенного к акустическому отражателю 1804. В данном иллюстративном примере связывающий трос 1806 соединен с акустическим отражателем 1804 и конструкцией 1802 воздушного судна.
На фиг. 19 показан модуль в соответствии с предпочтительным вариантом реализации. В данном иллюстративном примере показан открытый вид модуля 1900. В данном иллюстративном примере модуль 1900 представляет собой пример реализации модуля 446 по фиг. 4. Модуль 1900 показан в неразвернутой конфигурации. Модуль 1900 может быть реализован в различных положениях воздушного судна, таких как одно из положений 825, 826, 828 и 830 воздушного судна 800 по фиг. 8.
В данном иллюстративном примере модуль 1900 содержит конструкцию 1902 воздушного судна, акустический отражатель 1904 и несущие элементы 1906. Акустический отражатель 1904 расположен в полости 1910 в конструкции 1902 воздушного судна. Подвижная конструкция 1912 закрывает отверстие 1914 в конструкции 1902 воздушного судна. Подвижная конструкция 1912 может быть перемещена для открытия отверстия 1914.
Несущие элементы 1906 могут поддерживать акустический отражатель 1904 в полости 1910. Несущие элементы 1906 могут быть выполнены эластичными, гибкими или с сочетанием этих двух свойств. Несущие элементы 1906 могут быть выполнены с возможностью уменьшения усилий, которые могут быть приложены к акустическому отражателю 1904, когда возникает непреднамеренное столкновение с водной средой.
В данном иллюстративном примере, когда подвижная конструкция 1912 совершает перемещение для открытия отверстия 1914, акустический отражатель 1904 не может совершать перемещение за пределы конструкции 1902 воздушного судна. Акустический отражатель 1904 остается в полости 1910. Однако, когда подвижная конструкция 1912 совершает перемещение для открытия отверстия 1914, вода совершает перемещение в полости 1910. В итоге, акустический отражатель 1904 может принимать сигналы и передавать сигналы в ответ на прием сигналов.
На фиг. 20 показан модуль в соответствии с предпочтительным вариантом реализации. В данном иллюстративном примере показан открытый вид модуля 2000. В данном иллюстративном примере модуль 2000 представляет собой пример реализации модуля 446 по фиг. 4. Модуль 2000 показан в неразвернутой конфигурации. Модуль 2000 может быть реализован в различных положениях воздушного судна, таких как одно из положений 825, 826, 828 и 830 воздушного судна 800 по фиг. 8.
В данном иллюстративном примере модуль 2000 содержит конструкцию 2002 воздушного судна, акустический отражатель 2004 и пеноматериал 2006. Акустический отражатель 2004 расположен в полости 2008 в конструкции 2002 воздушного судна. Каналы 2010 выполнены в конструкции 2002 воздушного судна. Каналы 2010 обеспечивают средства для обеспечения возможности попадания воды в полость 2008.
Пеноматериал 2006 представляет собой часть системы сохранения рабочего состояния акустического отражателя 2004. Объем 2012 представлен в пеноматериале 2006. Акустический отражатель 2004 расположен в объеме 2012. Пеноматериал 2006 выполнен с возможностью обеспечения достижения водой каналов 2010 объема 2012. В этих иллюстративных примерах пеноматериал 2006 выполнен с возможностью предотвращения блокирования перемещения сигналов в конструкцию 2002 воздушного судна или из нее.
На фиг. 21 показан акустический отражатель в соответствии с предпочтительным вариантом реализации. Акустический отражатель 2100 представляет собой пример акустического отражателя, который может быть использован в генераторе сигналов.
В данном иллюстративном примере акустический отражатель 2100 имеет форму сферы. В данном иллюстративном примере акустический отражатель 2100 представляет собой пример пассивного генерирующего устройства для генерирования сигналов. В этих иллюстративных примерах акустический отражатель 2100 генерирует первые сигналы 2102 в ответ на прием вторых сигналов 2104. Эти сигналы принимают форму звуковых волн.
Другими словами, акустический отражатель 2100 выполняет функцию объекта, который может быть использован для отображения положения конструкции воздушного судна, с которой связан акустический отражатель 2100. Например, вторые сигналы 2104 могут быть приняты от системы 240 звуковой локации по фиг. 2. В ответ акустический отражатель 2100 генерирует первые сигналы 2102. Эти первые сигналы могут быть затем зарегистрированы системой 240 звуковой локации.
На фиг. 22 показан вид акустического отражателя в разрезе в соответствии с предпочтительным вариантом реализации. В данном иллюстративном примере акустический отражатель 2100 виден в сечении, выполненном вдоль линий 22-22 по фиг. 21.
На этом виде акустический отражатель 2100 имеет внутреннюю часть 2200 и внешнюю часть 2202. В данном иллюстративном примере внутренняя часть 2200 может формировать сердцевину с внешней частью 2202, формирующей оболочку вокруг внутренней части 2200.
В данном иллюстративном примере вторые сигналы 2104 могут совершать перемещение в качестве волн в направлении стрелки 2204 во внешней части 2202. Эти волны могут сходиться в месте 2206 и могут быть направлены через внутреннюю часть 2200 в направлении стрелок 2208 для передачи обратно через внешнюю часть 2202 в качестве первых сигналов 2102.
Иллюстрации и компоненты и конфигурации на фиг. 8-22 не предназначены для введения исключений в способ, которым могут быть реализованы различные предпочтительные варианты реализации. Изображения на этих чертежах предназначены исключительно для обеспечения примеров того, как компоненты, показанные в блочной форме, могут быть реализованы в некоторых вариантах реализации. Например, различные модули показаны на этих чертежах в качестве кубов. Модули могут быть реализованы в других формах. Например, может быть использован кубоидный, ромбоидный, цилиндрический, пирамидоидальный или некоторый неправильный объем. В качестве другого примера, генератор радиочастотного сигнала может быть выполнен с возможностью приведения его в действие при регистрации звука от акустического отражателя, связанного с другой конструкцией воздушного судна от радиочастотного генератора. Еще в одних иллюстративных примерах генератор звука, акустический буй, световой маяк и/или некоторый другой подходящий генератор сигналов может быть использован вместо радиочастотного генератора или в дополнение к нему.
В качестве другого иллюстративного примера, связывающие тросы на чертежах могут быть прикреплены к модулю или другой конструкции с использованием барабана или других средств, которые выполнены с возможностью управления перемещением акустического отражателя по направлению вверх в воде. Барабан может принимать форму натяжного барабана, который управляет скоростью, с которой акустический отражатель совершает перемещение по направлению вверх, что уменьшает запутывание связывающего троса. Еще в одном иллюстративном примере связывающий трос может иметь длину, которая выполнена с возможностью размещения акустического отражателя в месте над обломками в воде. Данное положение выбирают для увеличения территории, в которой акустический отражатель может получать сигналы от систем поиска. Другими словами, необходимо наличие 360-градусной области обзора у акустического отражателя. Кроме того, система для обеспечения плавучести может быть прикреплена к акустическому отражателю и/или связывающему тросу для создания положительной плавучести акустического отражателя таким образом, что акустический отражатель будет плыть по направлению вверх.
На фиг. 23 показана блок-схема процесса определения положения конструкций воздушного судна в соответствии с предпочтительным вариантом реализации. Процесс, показанный на фиг. 23, может быть реализован в среде 200 для определения положения воздушного судна по фиг. 2. В частности, данный процесс может быть реализован с использованием локационной системы 216 воздушного судна. В частности, одна или большее количество различных операций могут быть реализованы в локационной системе 220 сигналов.
Процесс начинается с идентификации частоты акустического отражателя, связанного с первой конструкцией воздушного судна (операция 2300). Первая частота соответствует первой выбранной частоте акустического отражателя, связанного с первой конструкцией воздушного судна. Первая конструкция воздушного судна предназначена для воздушного судна, которое непреднамеренно столкнулось с водной средой. Первая конструкция воздушного судна может представлять собой, например, крыло воздушного судна.
Первый звуковой сигнал с первой частотой отправляют в водную среду с использованием системы звуковой локации (операция 2302). Определяют, зарегистрирован ли первый ответный сигнал в ответ на первый звуковой сигнал (операция 2304). Если ответный сигнал не зарегистрирован, то процесс перемещает систему звуковой локации в новое положение, которое следует из схемы поиска (операция 2306). В одном иллюстративном примере операция 2306 может включать выбор нового положения в схеме поиска на основании анализа погоды, течения, времени, прошедшего после столкновения с водной средой, и вычисленного места столкновения воздушного судна в водной среде. Процесс затем возвращается к операции 2302.
Если регистрируют первый ответный сигнал, то направление к первой конструкции воздушного судна идентифицируют с использованием ответного сигнала (операция 2308). Процесс перемещает локационную систему сигналов таким образом, чтобы идентифицировать положение первой конструкции воздушного судна (операция 2309). Перемещение локационной системы сигналов происходит в направлении, идентифицированном для первой конструкции воздушного судна в операции 2308.
Определяют, имеет ли первый ответный сигнал необходимую силу (операция 2310). Эта необходимая сила представляет собой силу первого ответного сигнала, который идентифицирует положение конструкции воздушного судна. Пороговое значение также может представлять собой уровень, при котором может начаться поиск второго акустического отражателя. Если сила сигнала не соответствует необходимому уровню, то процесс возвращается к операции 2309.
В противном случае процесс выбирает вторую частоту (операция 2312). Вторая частота соответствует выбранной частоте второго акустического отражателя, связанного со второй конструкцией воздушного судна. Данная конструкция воздушного судна может представлять собой, например, записывающее устройство для записи данных. Процесс затем отправляет второй звуковой сигнал, имеющий вторую частоту, в водную среду (операция 2314).
Определяют, зарегистрирован ли второй ответ, сгенерированный в ответ на второй звуковой сигнал (операция 2316). Если второй ответ не зарегистрирован, то процесс перемещает систему звуковой локации в новое положение (операция 2318) с последующим возвратом процесса к операции 2314.
Если второй ответ зарегистрирован, то процесс идентифицирует направление ко второй конструкции воздушного судна с использованием второго ответного сигнала (операция 2320). Процесс перемещает локационную систему сигналов таким образом, чтобы идентифицировать положение второй конструкции воздушного судна (операция 2322). В операции 2322 локационная система сигналов может быть перемещена таким образом, что происходит увеличение амплитуды второго ответного сигнала. Эта амплитуда может быть отнесена к силе второго ответного сигнала.
Определяют, имеет ли второй ответный сигнал необходимую силу (операция 2324). Эта необходимая сила представляет собой силу второго ответного сигнала, который идентифицирует положение конструкции воздушного судна. Если второй ответный сигнал имеет необходимую силу, то происходит завершение процесса. В альтернативном варианте процесс может вернуться к операции 2300 для определения положения новых конструкций воздушного судна. В противном случае процесс перемещает систему звуковой локации в новое положение на основании идентифицированного направления (операция 2326) с последующим возвратом процесса к операции 2324.
Таким образом, локационная система сигналов может идентифицировать первый отражатель, связанный с первой конструкцией воздушного судна. Этот первый отражатель может иметь более низкую частоту, чем второй отражатель, положение которого должно быть определено. Более низкая частота увеличивает диапазон, при котором первый отражатель может быть зарегистрирован. Эта более низкая частота часто приводит к наличию у первого отражателя большего размера, чем у второго отражателя, имеющего более высокую частоту. В итоге, первый отражатель может быть связан с большими конструкциями воздушного судна по сравнению со вторым отражателем. Например, первый отражатель может быть связан с крылом воздушного судна, а второй отражатель может быть связан с черным ящиком воздушного судна.
На фиг. 24 показана блок-схема процесса определения положения конструкций воздушного судна в соответствии с предпочтительным вариантом реализации. Данный процесс может быть реализован в среде 200 для определения положения воздушного судна по фиг. 2. В частности, данный процесс может быть реализован с использованием локационной системы 220 сигналов.
Процесс начинается с выбора конструкции воздушного судна, положение которой необходимо определить (операция 2400). Процесс затем идентифицирует частоту отражателя, связанного с конструкцией воздушного судна (операция 2402).
Процесс затем настраивает систему звуковой локации на использование выбранной частоты (операция 2404). Процесс затем передает первый звуковой сигнал, имеющий выбранную частоту (операция 2406). Первый звуковой сигнал передают в водную среду.
Определяют, принят ли первый ответный сигнал (операция 2408). Если первый ответный сигнал не принят, то процесс возвращается к операции 2406.
В противном случае процесс идентифицирует положение конструкции воздушного судна с использованием первых сигналов (операция 2410) с последующим завершением процесса. В операции 2410 система звуковой локации может быть перемещена, или направление, в котором система звуковой локации совершает перемещение, может быть изменено на основании силы сигнала. Процесс на фиг. 24 может быть выполнен одновременно для различных частот посредством системы звуковой локации или посредством других систем звуковой локации.
На фиг. 25 показана блок-схема процесса идентификации положения частей воздушного судна в соответствии с предпочтительным вариантом реализации. В данном иллюстративном примере процесс по фиг. 25 может быть реализован в среде 200 для определения положения воздушного судна по фиг. 2. В частности, процесс может быть реализован с использованием локационной системы 220 сигналов. Локационная система 220 сигналов по фиг. 2 может быть использована вместе с системой 400 сигналов по фиг. 4.
Процесс начинается с ожидания спутниковой передачи от системы сигналов (операция 2500). В этих иллюстративных примерах система сигналов может содержать генератор радиочастотного сигнала, который генерирует сигнал, выполненный с возможностью его приема спутниковой системой. Система также может содержать устройство данных, соединенное радиочастотным генератором. Устройство данных может быть выполнено с возможностью хранения и с возможностью отправки информации с использованием радиочастотного генератора. Данная информация может содержать, например, информацию о глубине нахождения конструкции воздушного судна, идентификацию конструкции воздушного судна и/или другую подходящую информацию.
В качестве еще одного примера, система сигналов также может содержать блок для глобального определения положения. Данное устройство может передавать положение спутниковой системы.
Когда зарегистрирован спутниковый сигнал, процесс идентифицирует положение по этому сигналу (операция 2502). В этих иллюстративных примерах положение может представлять собой приблизительное положение. Данное положение может быть идентифицировано на основании координат, передаваемых генератором радиочастотного сигнала. Генератор радиочастотного сигнала может содержать блок для глобального определения положения, который идентифицирует положение передатчика.
Соответственно, одну или большее количество локационных систем сигналов перемещают в идентифицированное положение (операция 2504). Процесс затем передает первые сигналы для поиска конструкций воздушного судна (операция 2506) с последующим завершением процесса. Операция 2506 может быть выполнена путем использования операций из блок-схемы по фиг. 23 и/или по фиг. 24. Использование генератора радиочастотного сигнала может обеспечить положение или приблизительное положение конкретного генератора сигналов.
На фиг. 26 показана блок-схема процесса генерирования сигналов для использования в определении положения конструкций воздушного судна в соответствии с предпочтительным вариантом реализации. Процесс, показанный на фиг. 26, может быть реализован в среде 200 для определения положения воздушного судна по фиг. 2. Данный процесс может быть реализован посредством системы 400 сигналов по фиг. 4.
Процесс начинается с регистрации выбранного уровня давления (операция 2600). Данное давление представляет собой давление, которое можно ожидать после столкновения воздушного судна с водной средой во время полета. Данное давление может представлять собой давление, которое ожидают, когда конструкция воздушного судна достигает определенной заданной глубины в воде. Когда зарегистрировано выбранное давление, процесс приводит в действие удерживающую систему для освобождения генератора радиочастотного сигнала (операция 2602). Освобождение генератора радиочастотного сигнала может быть использовано для обеспечения первоначального сигнала положения конструкции воздушного судна.
Процесс также освобождает акустический отражатель (операция 2604) с последующим завершением процесса. В этих иллюстративных примерах генератор радиочастотного сигнала и акустический отражатель могут быть освобождены путем перемещения подвижной конструкции. Перемещение подвижной конструкции может обеспечивать возможность перемещения этих компонентов из полости одной или большего количества конструкций воздушного судна, в которых расположены эти компоненты.
Согласно фиг. 27 показана бок-схема процесса работы генератора радиочастотного сигнала в соответствии с предпочтительным вариантом реализации. В данном иллюстративном примере процесс может быть реализован посредством генератора 424 радиочастотного сигнала по фиг. 4. В частности, данный процесс может быть реализован посредством управляющего устройства 430 для управления работой генератора 424 радиочастотного сигнала.
Процесс начинается с контроля звукового сигнала, имеющего выбранную частоту (операция 2700). Выбранная частота представляет собой частоту акустического отражателя, связанного с конструкцией воздушного судна. Генератор сигналов может быть связан с теми же самыми или различными конструкциями воздушного судна в зависимости от реализации.
Определяют, зарегистрирован ли звуковой сигнал (операция 2702). Если звуковой сигнал не зарегистрирован, то процесс возвращается к операции 2700.
В противном случае процесс задает период времени (операция 2704). Процесс затем управляет генератором радиочастотного сигнала для передачи сигналов (операция 2706). Эти сигналы могут иметь множество частот.
Определяют, истек ли период времени (операция 2708). Если период времени не истек, то процесс определяет, был ли зарегистрирован ответный сигнал (операция 2710). Если ответный сигнал не был зарегистрирован, то процесс возвращается к операции 2708. Если сигнал был зарегистрирован, то процесс сбрасывает период времени (операция 2712). Процесс затем возвращается к операции 2708.
В операции 2708, если период времени истек, то процесс управляет генератором радиочастотного сигнала для непрерывной передачи сигналов (операция 2714). После этого происходит завершение процесса.
Блок-схемы и структурные схемы в различных описанных вариантах реализации иллюстрируют архитектуру, функциональные возможности и работу некоторых возможных реализаций устройств и способов в предпочтительном варианте реализации. При этом, каждый блок в блок-схеме или структурных схемах может отражать модуль, часть, функцию и/или часть операции или этапа. Например, один или большее количество блоков могут быть реализованы в качестве программного обеспечения, аппаратного обеспечения или их сочетания. Когда реализовано в виде аппаратного обеспечения, это аппаратное обеспечение может, например, принимать форму интегральных схем, которые изготовлены или выполнены с возможностью выполнения одного или большего количества операций в блок-схемах или структурных схемах.
В некоторых альтернативных реализациях предпочтительного варианта реализации функция или функции, указанные в блоке, могут возникать из определенного порядка, указанного на чертежах. Например, в некоторых случаях два блока, показанных последовательно, могут быть выполнены по существу одновременно или эти блоки могут быть иногда выполнены в обратном порядке в зависимости от предусмотренных функциональных возможностей. Кроме того, другие блоки могут быть добавлены к изображенным блокам в блок-схеме или структурной схеме.
Описание различных предпочтительных вариантов реализации было приведено для целей иллюстрации и описания и не предназначено для исчерпывания или ограничения вариантами реализации в раскрытой форме. Специалистам в области техники будут очевидны многие модификации и изменения. Кроме того, различные предпочтительные варианты реализации могут обеспечивать различные преимущества по сравнению с другими предпочтительными вариантами реализации. Выбранный вариант реализации или выбранные варианты реализации отобраны и описаны для наилучшего пояснения принципов вариантов реализации, практического применения и для обеспечения возможности понимания другими специалистами в области техники сущности различных вариантов реализации с различными модификациями, которые подходят для предполагаемого конкретного использования.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПОЛУЧЕНИЯ АКТИВНОГО ПРОГРАММИРУЕМОГО АКУСТИЧЕСКОГО МЕТАМАТЕРИАЛА | 2015 |
|
RU2671643C2 |
| СИСТЕМА ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЖИВОТНЫХ | 2012 |
|
RU2615470C2 |
| СИСТЕМА БЕСПРОВОДНЫХ ТОПЛИВНЫХ ДАТЧИКОВ | 2015 |
|
RU2678760C2 |
| СИСТЕМА И СПОСОБ ХРАНЕНИЯ ДАННЫХ В ДВИЖЕНИИ | 2017 |
|
RU2691631C1 |
| БЕСПРОВОДНАЯ ДАТЧИКОВАЯ СИСТЕМА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2014 |
|
RU2686805C2 |
| СИСТЕМА ПОДПОВЕРХНОСТНОЙ ЛОКАЦИИ И СПОСОБ СЛЕЖЕНИЯ ЗА ПОДЗЕМНЫМИ ПЕРЕМЕЩЕНИЯМИ | 2008 |
|
RU2453862C2 |
| МАЛОМОЩНЫЙ РАДИОЧАСТОТНЫЙ ПРИЕМНИК, ПРЕОБРАЗУЮЩИЙ РАДИОЧАСТОТНЫЙ СИГНАЛ В ЦИФРОВУЮ ФОРМУ | 2012 |
|
RU2613932C9 |
| СИСТЕМА И СПОСОБ ХРАНЕНИЯ ДАННЫХ В ДВИЖЕНИИ | 2017 |
|
RU2717559C2 |
| ПОДАВЛЕНИЕ СИГНАЛА ДЛЯ ИССЛЕДОВАНИЯ СПЕКТРА ДРУГОГО СИГНАЛА | 2017 |
|
RU2742193C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ОБНАРУЖЕНИЯ ОБМАННЫХ ОБЪЕКТОВ И АНАЛИЗА ЖИЗНЕННОСТИ | 2016 |
|
RU2725413C2 |
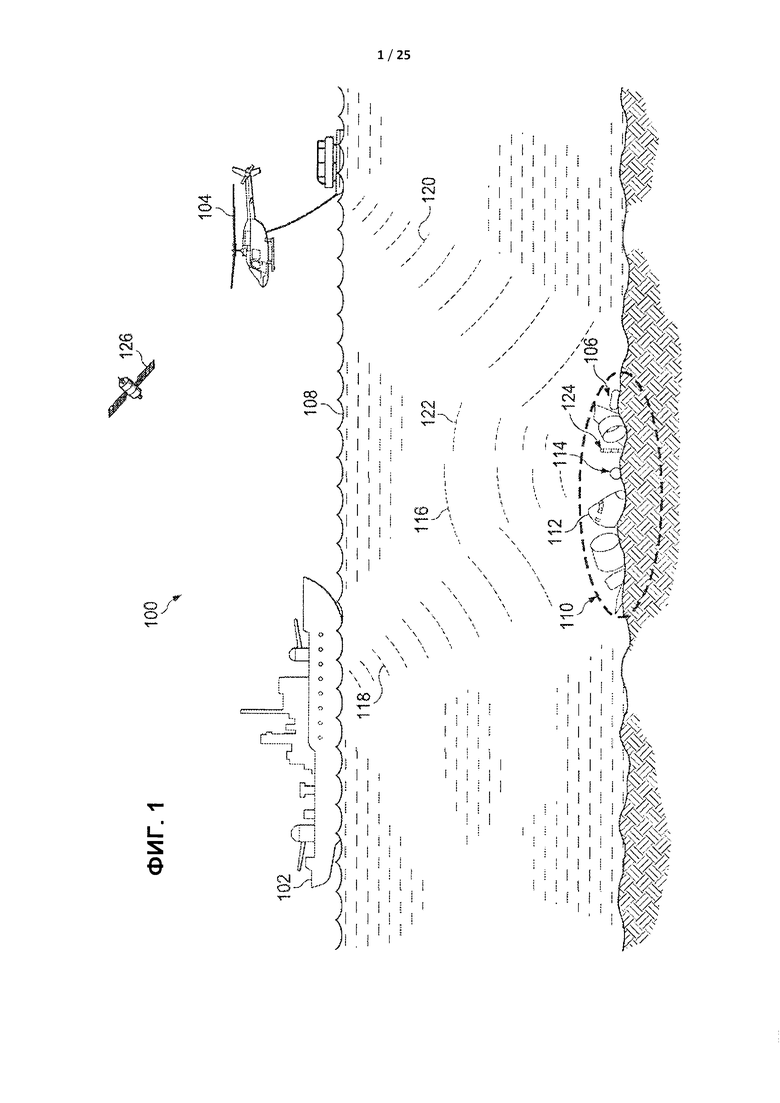
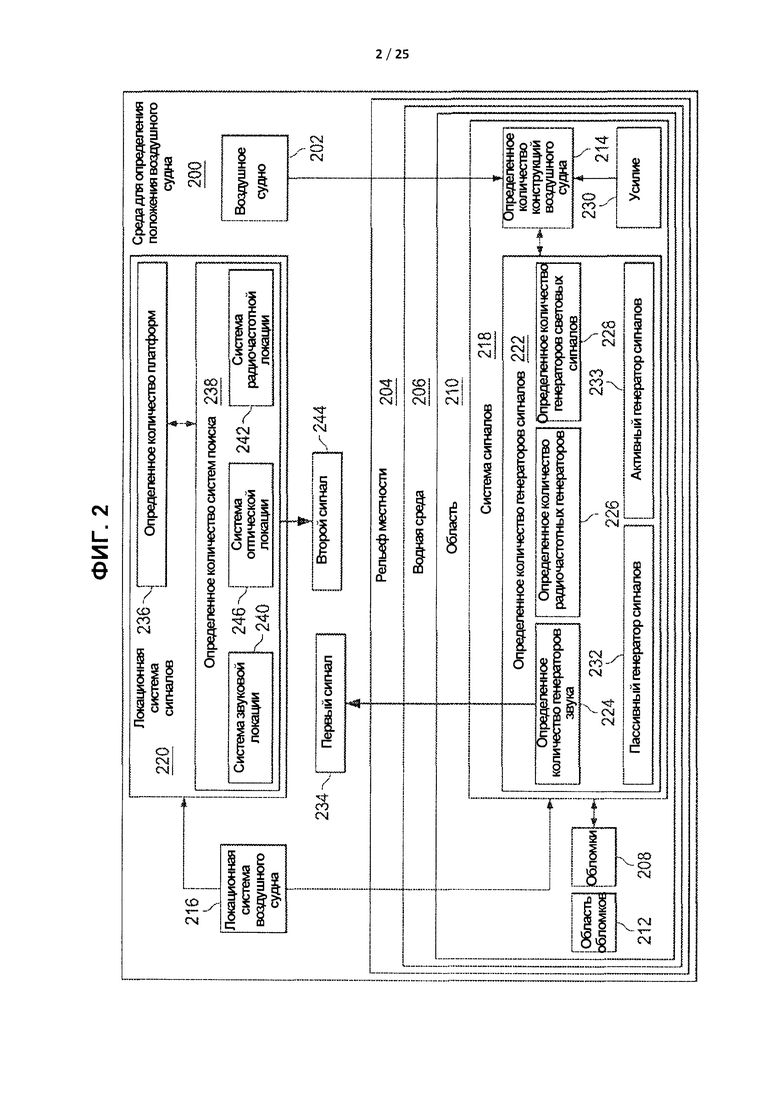
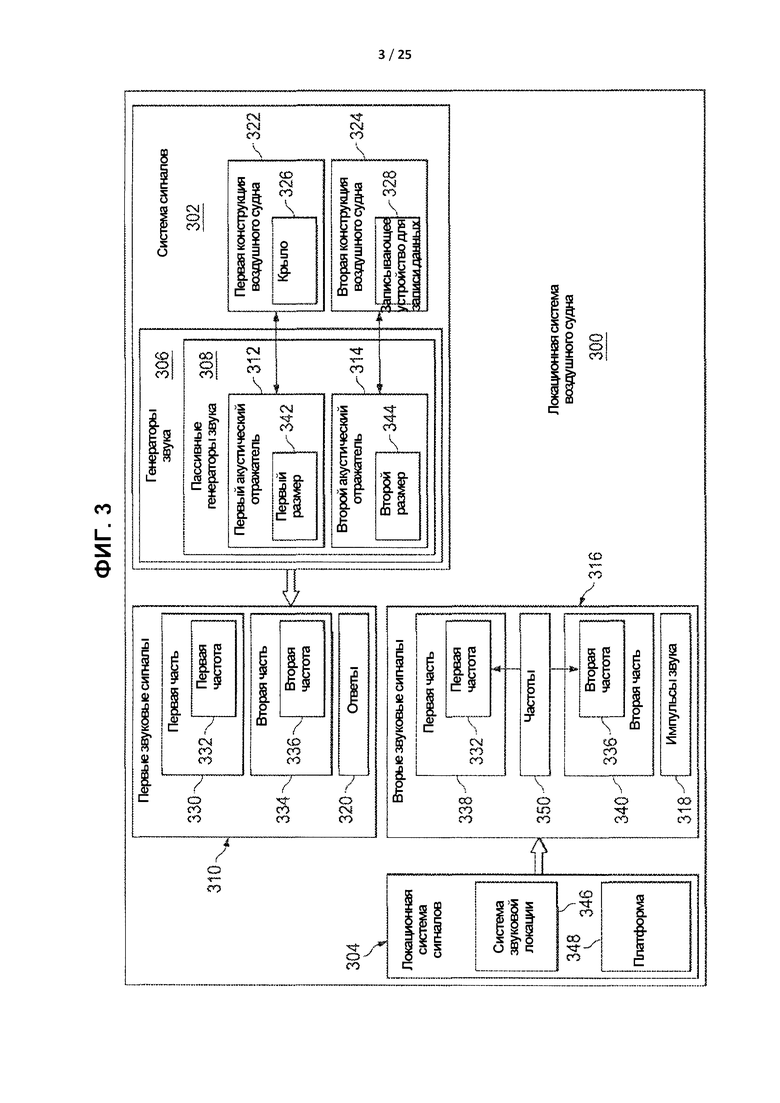
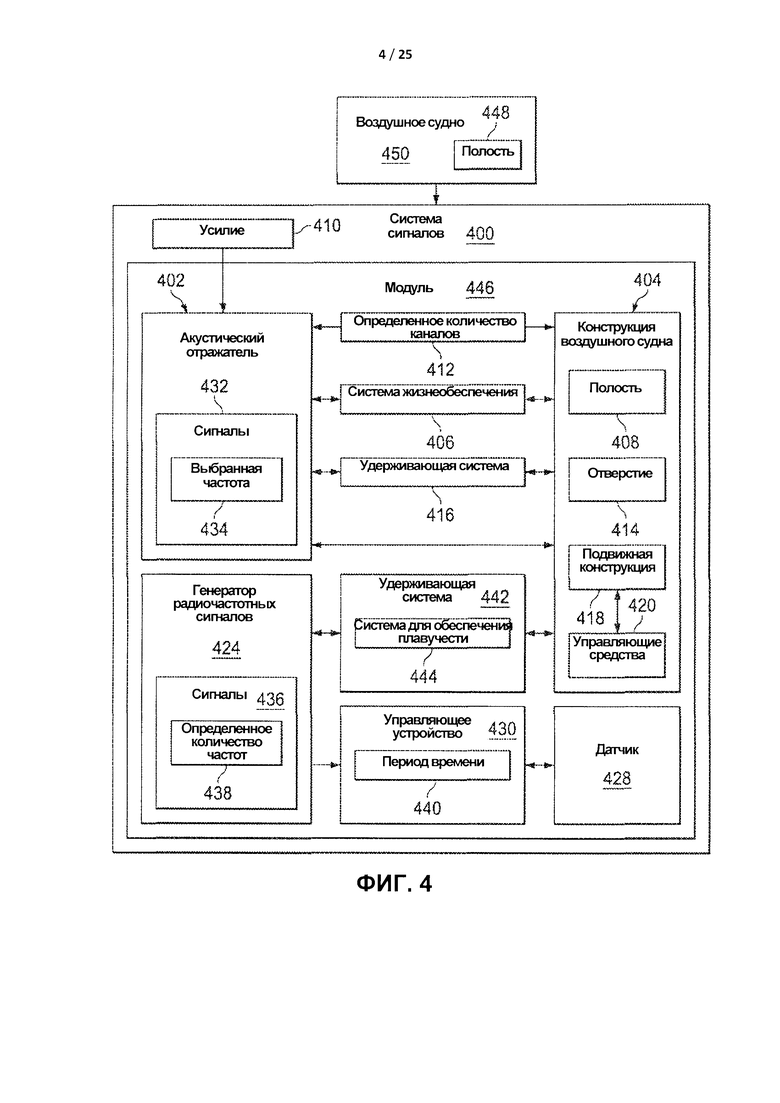
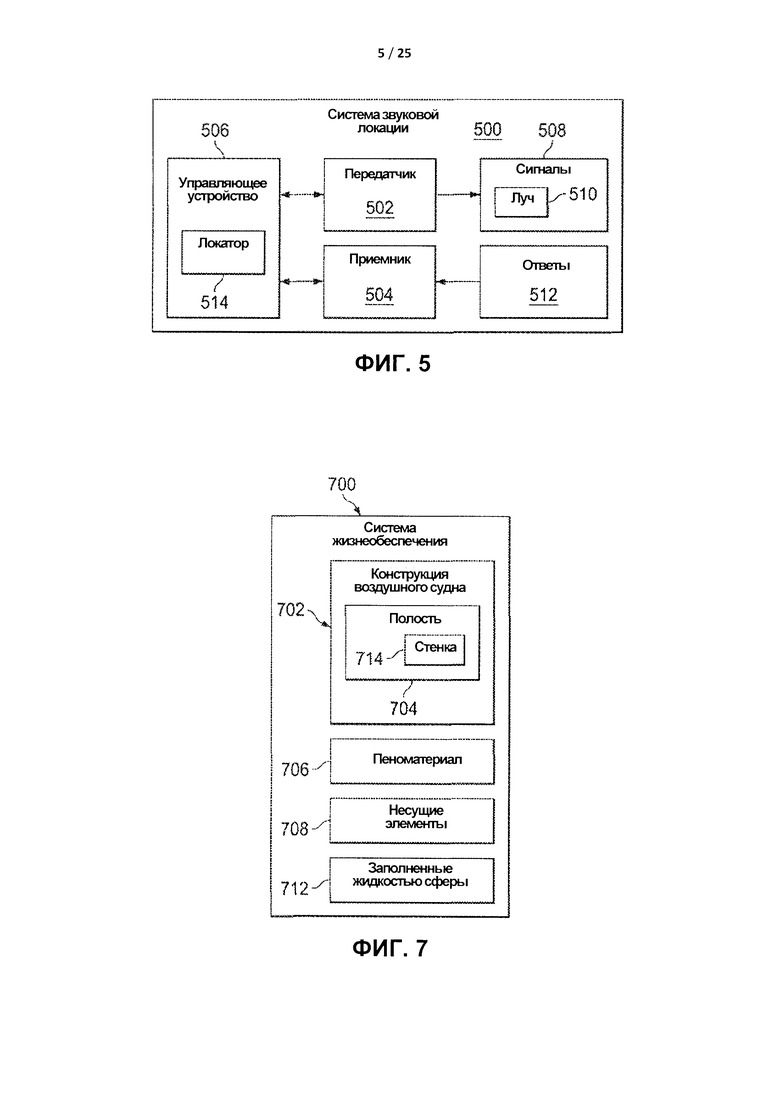
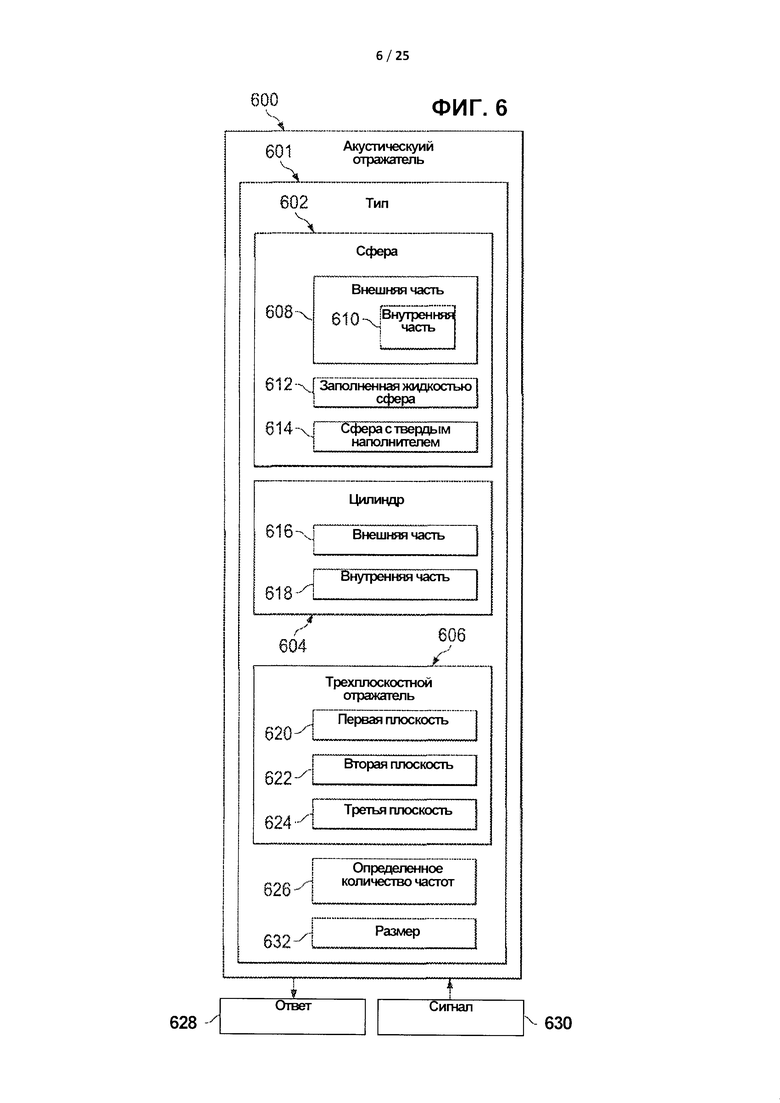
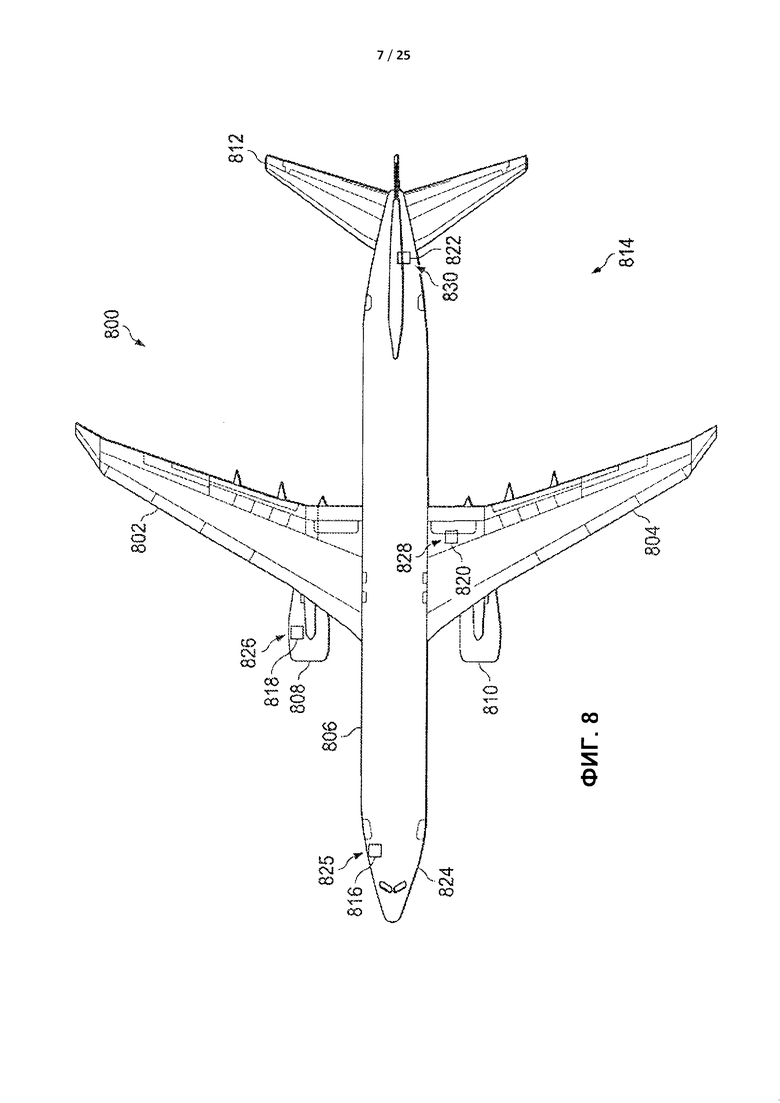
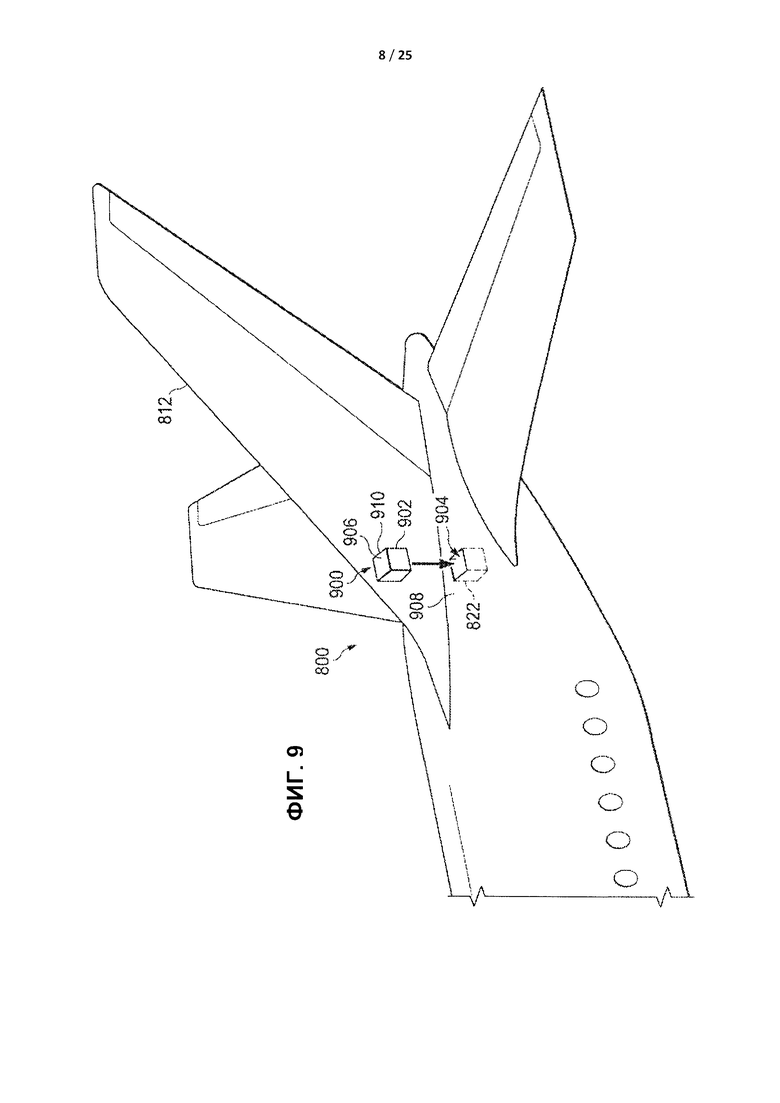
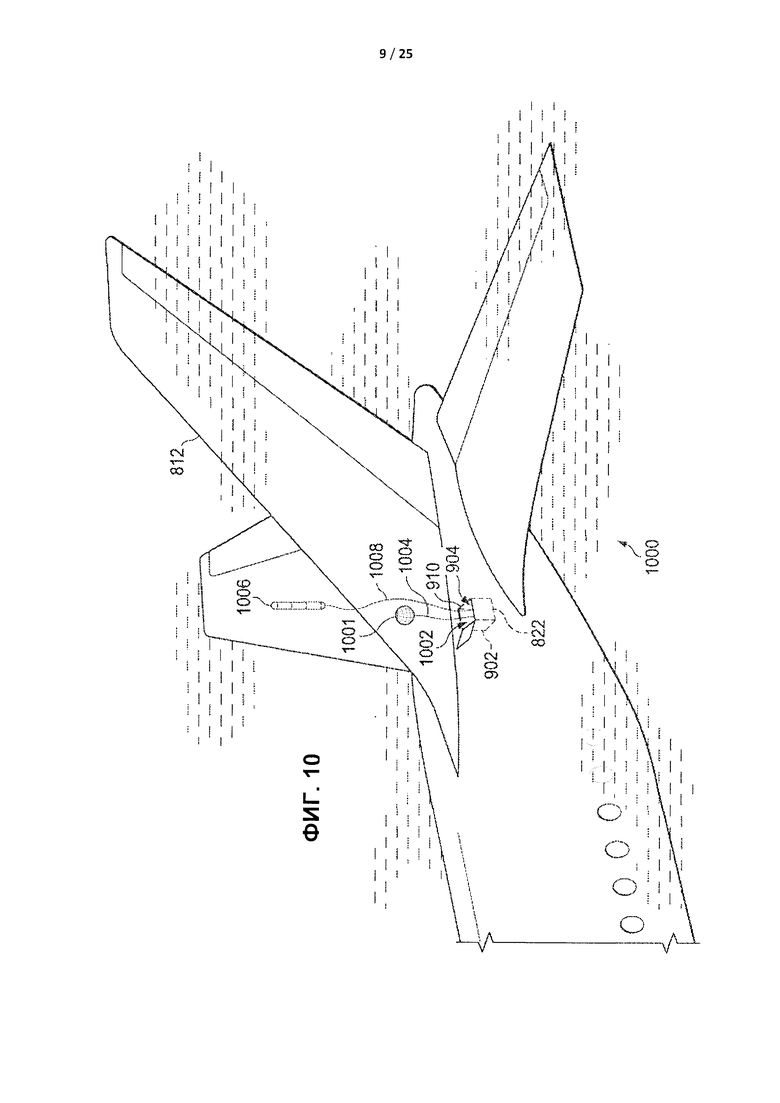
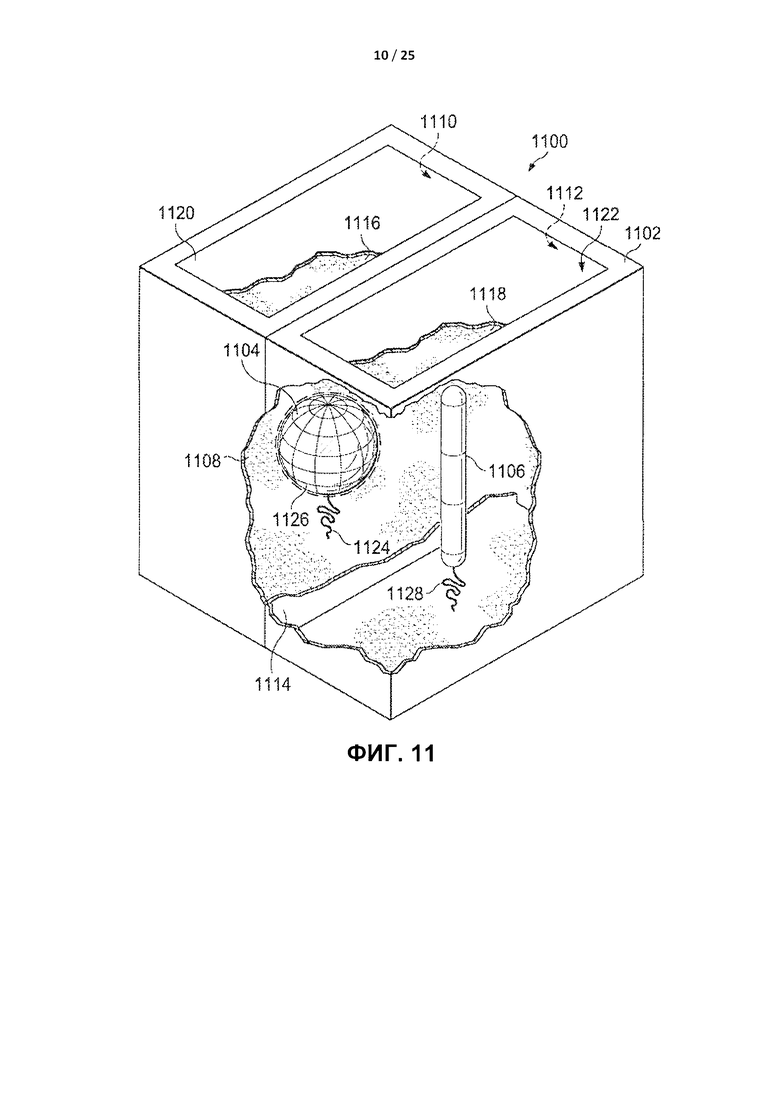
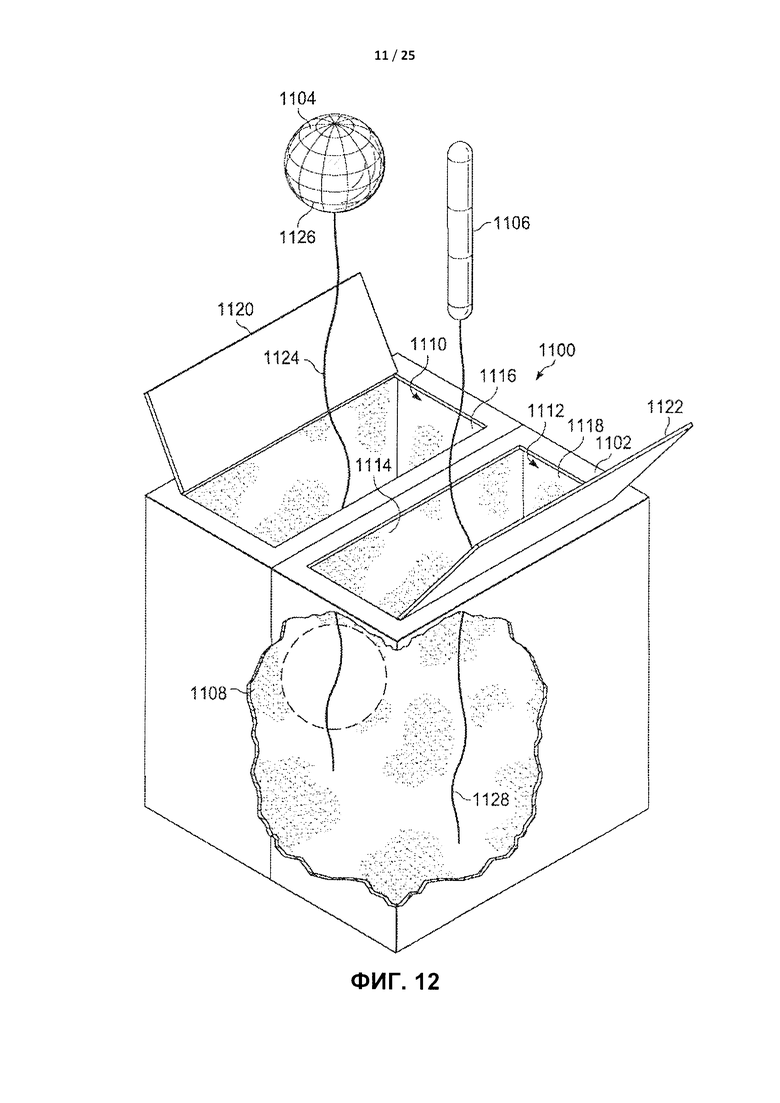
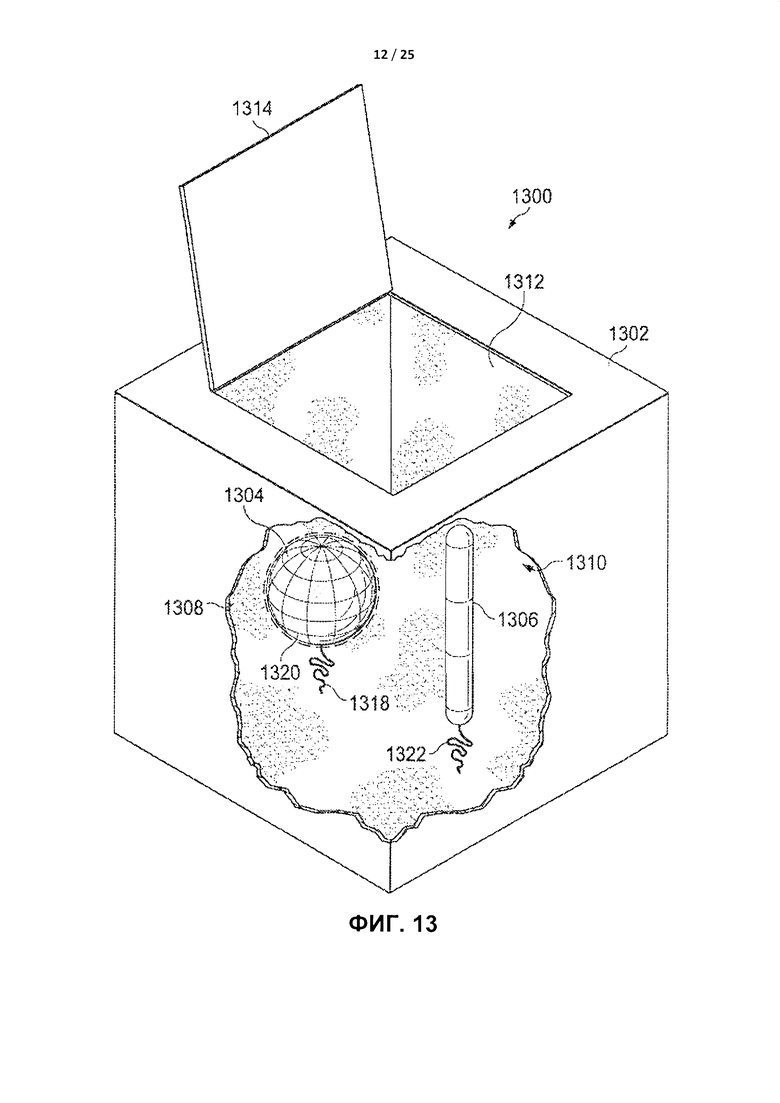
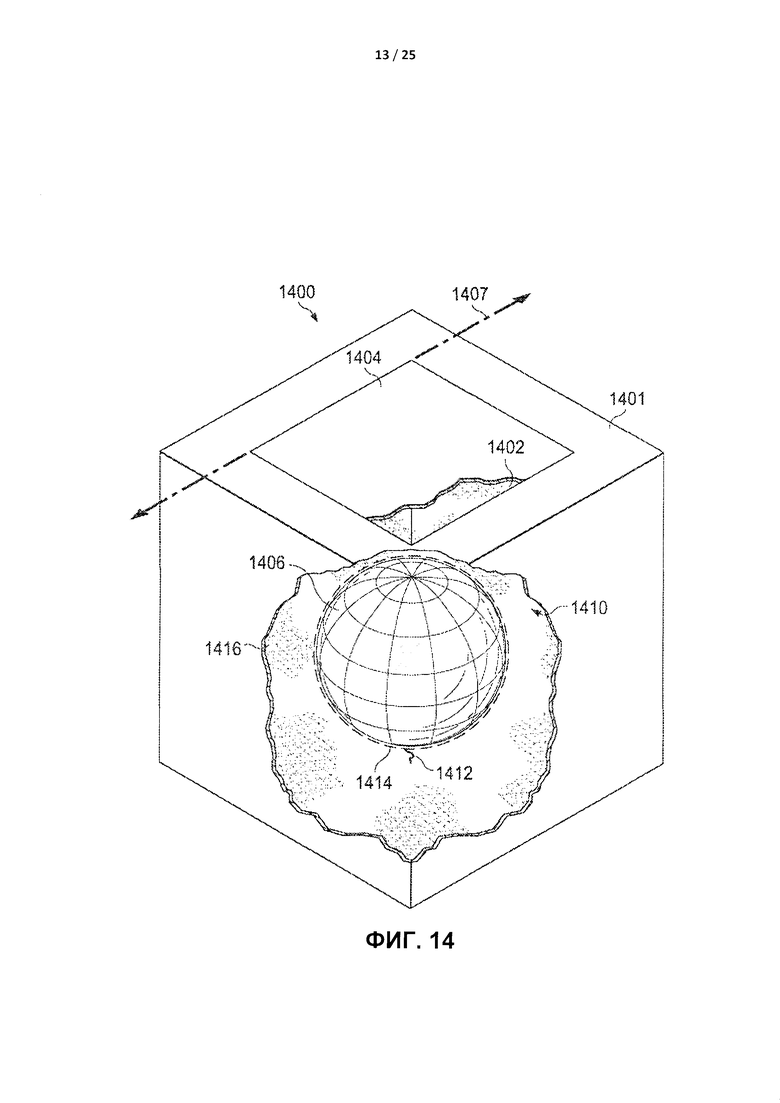
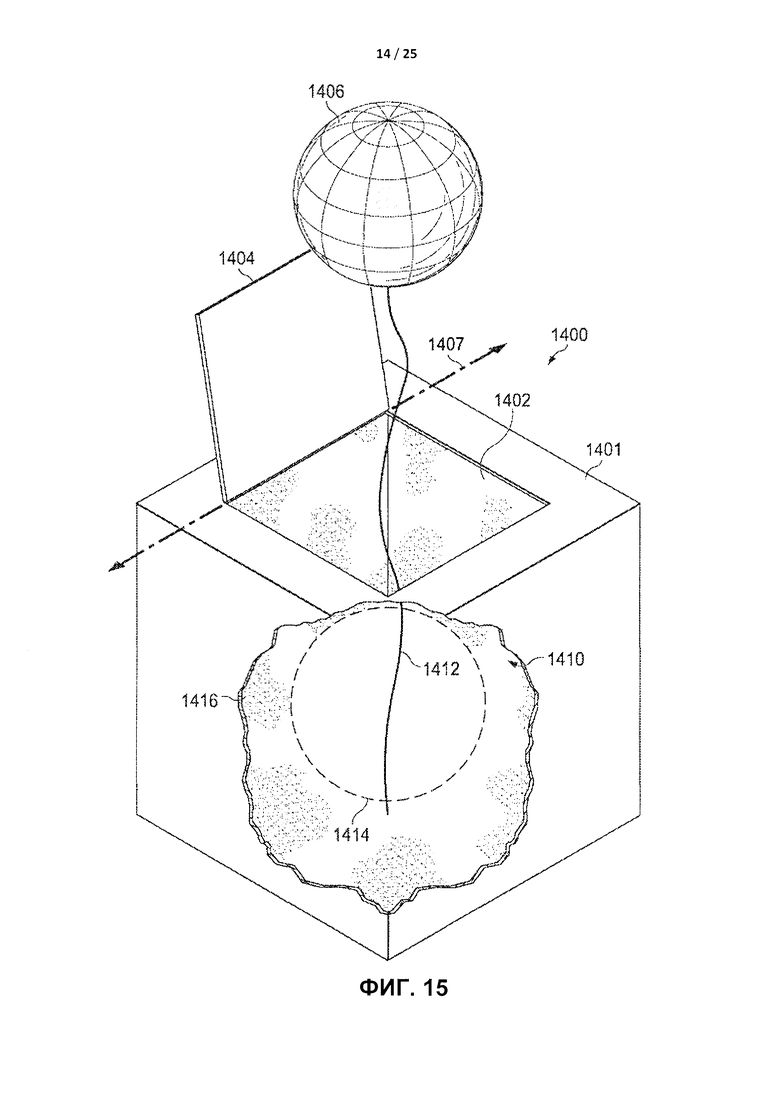
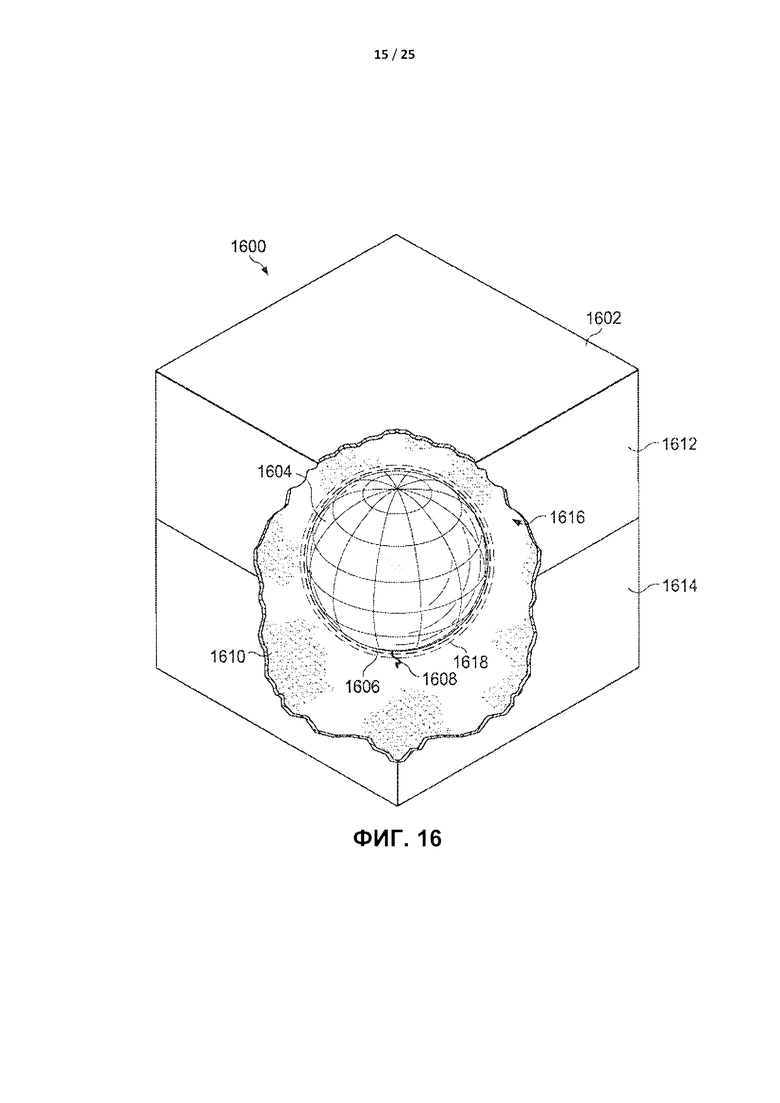
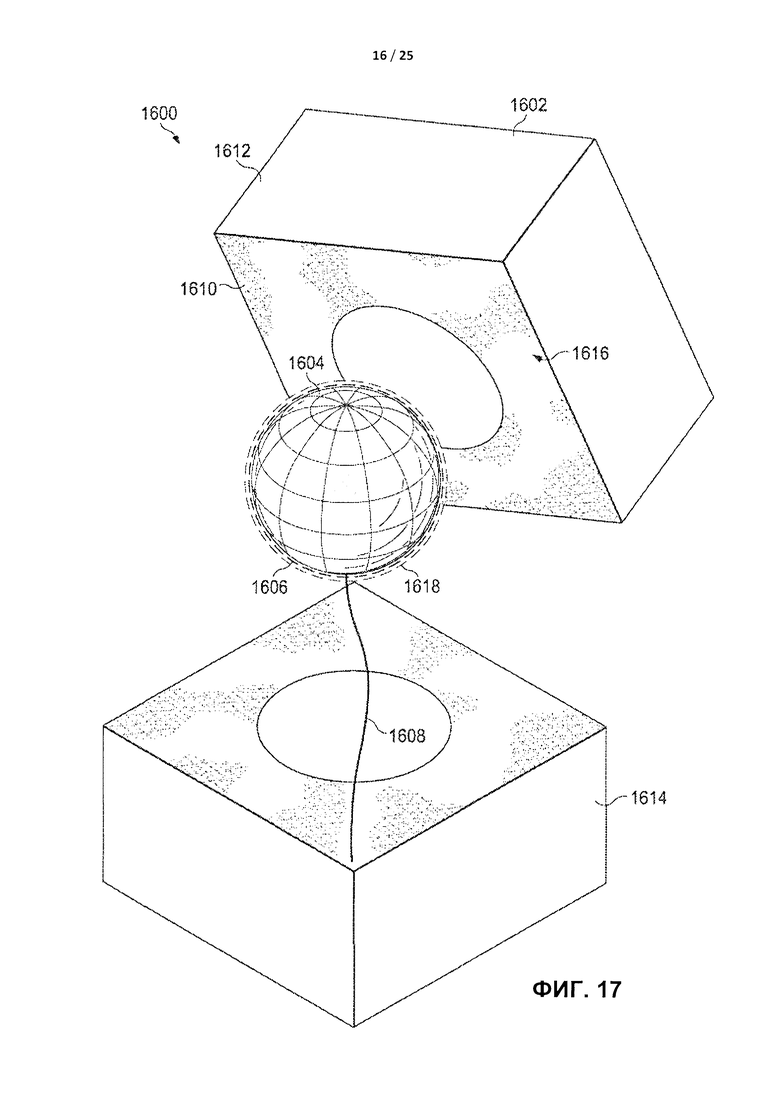
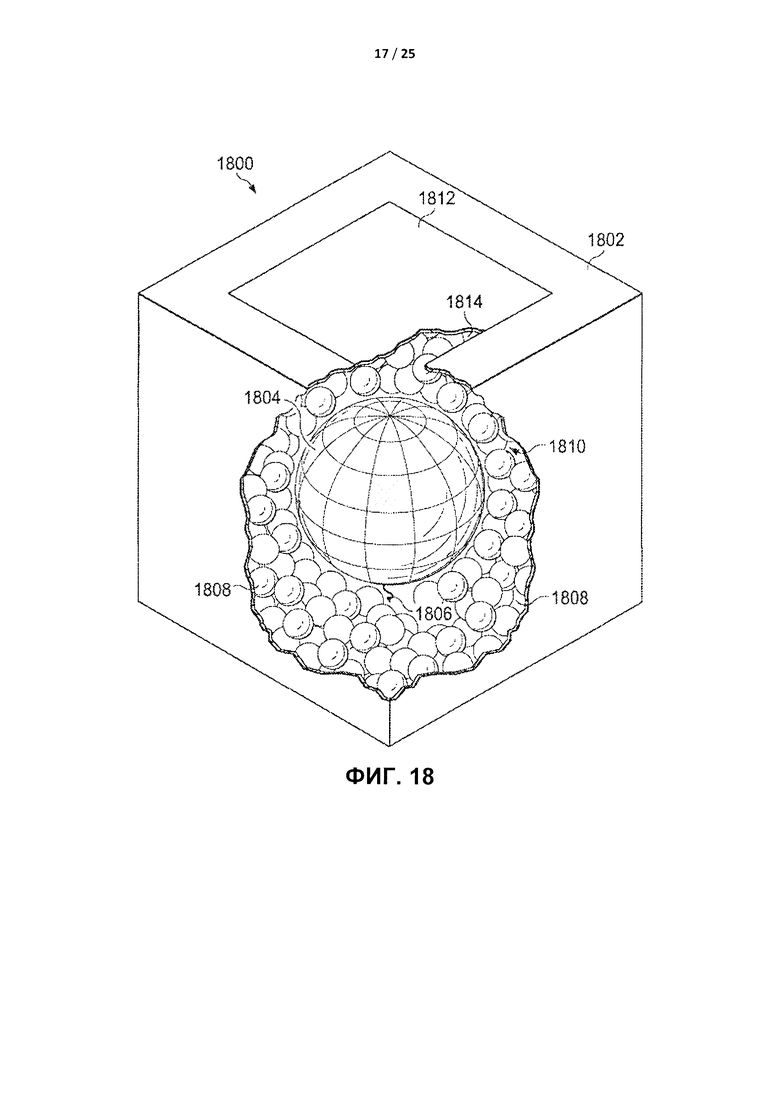
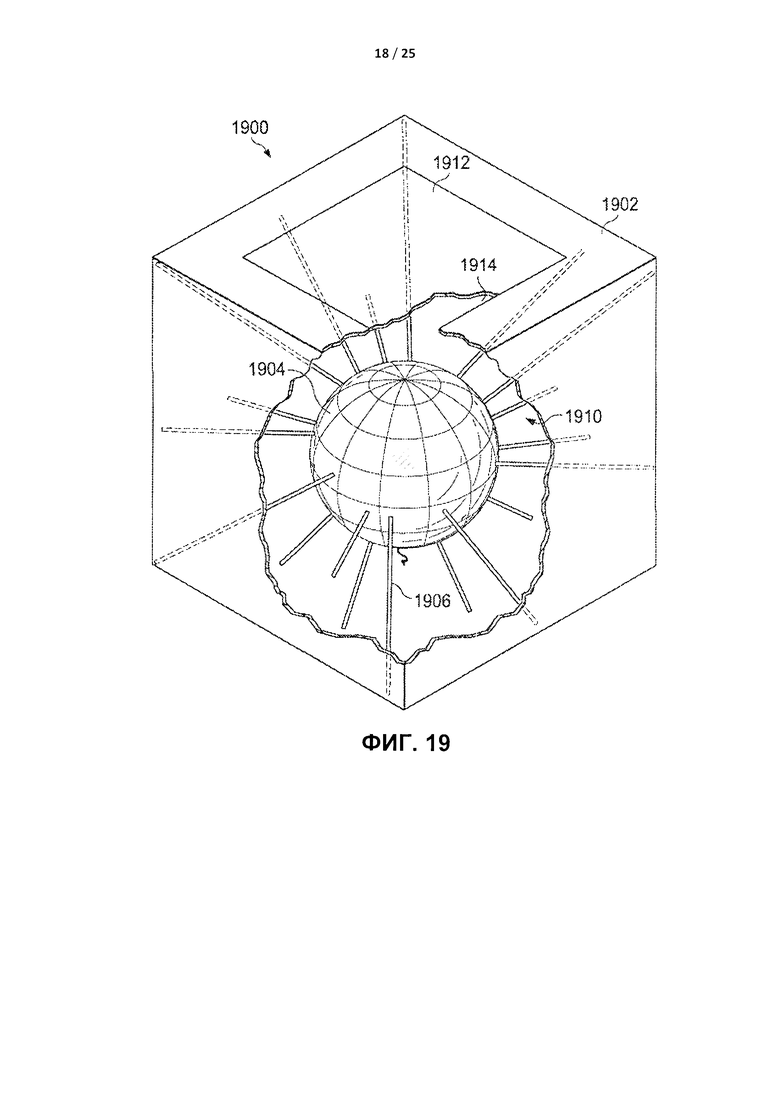
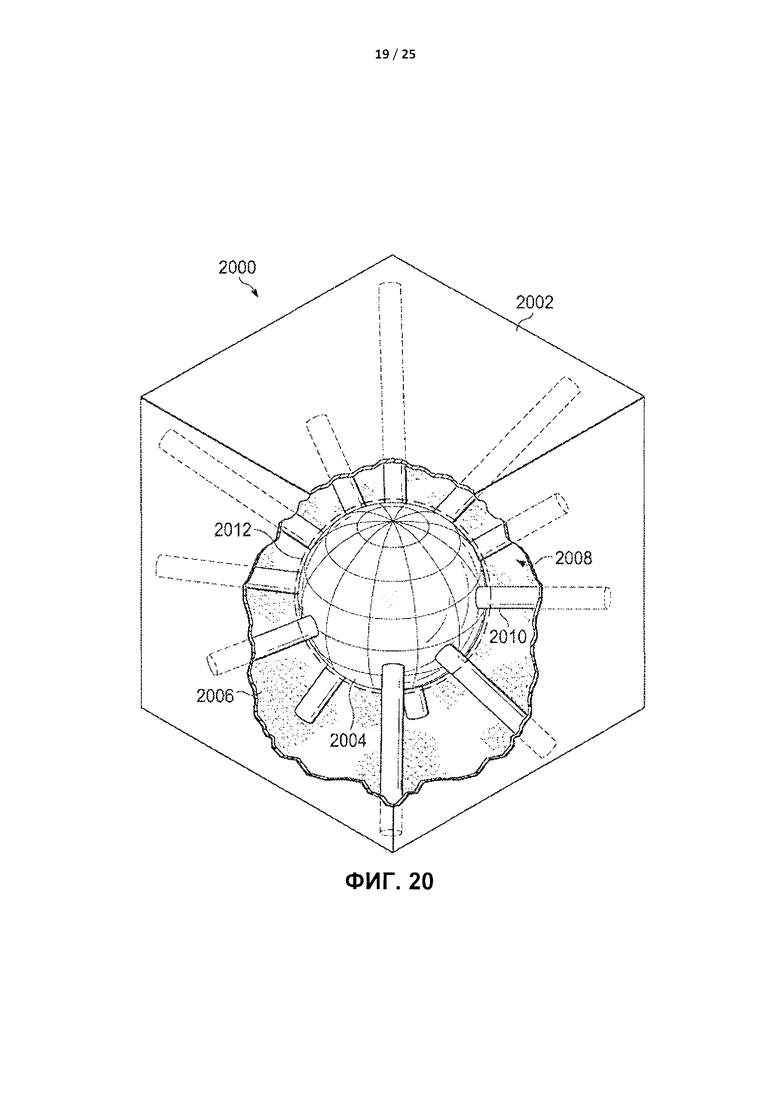
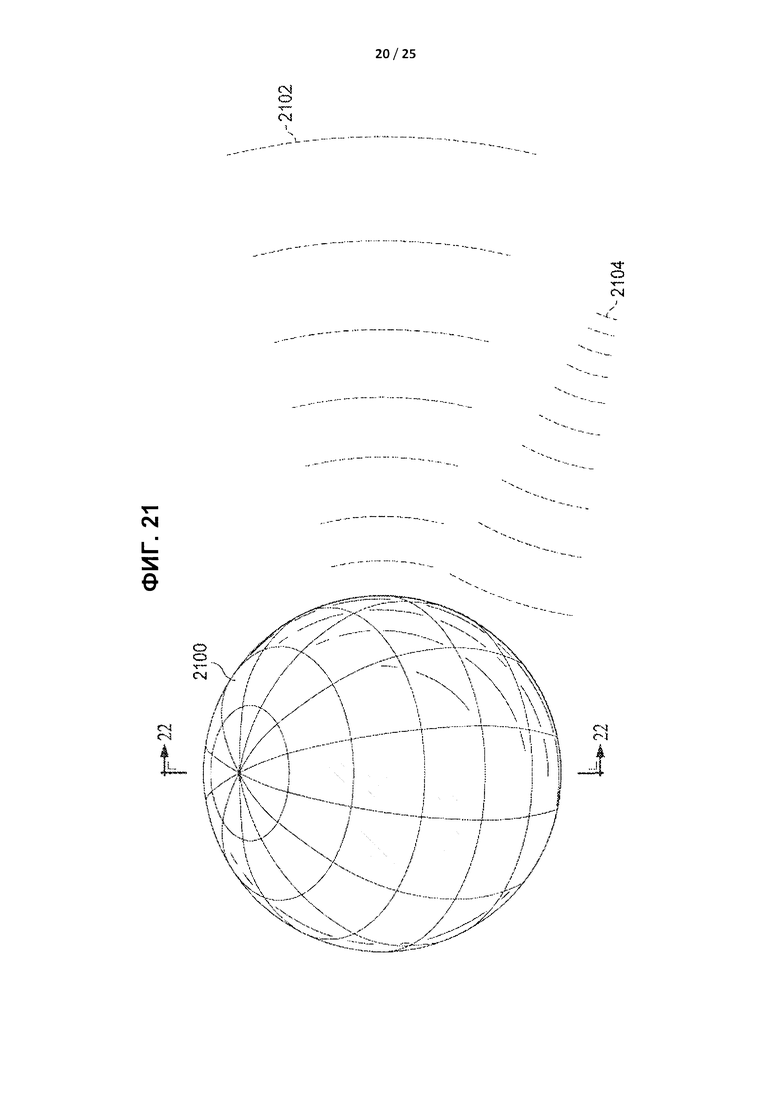
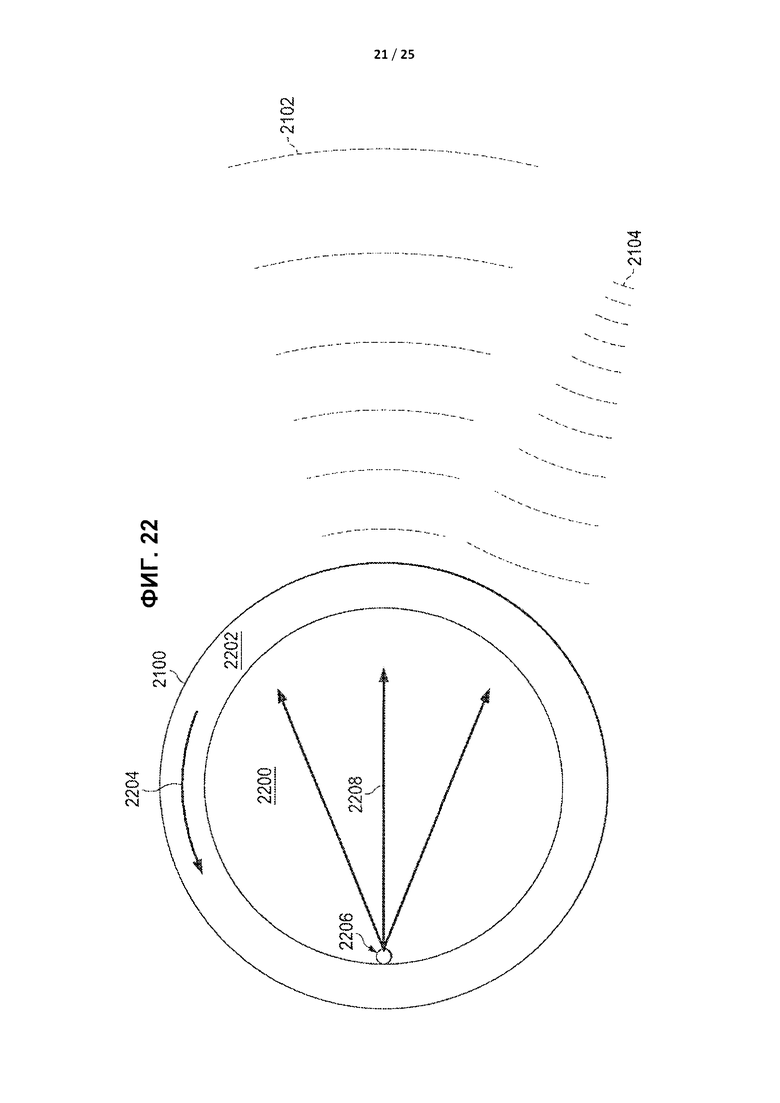
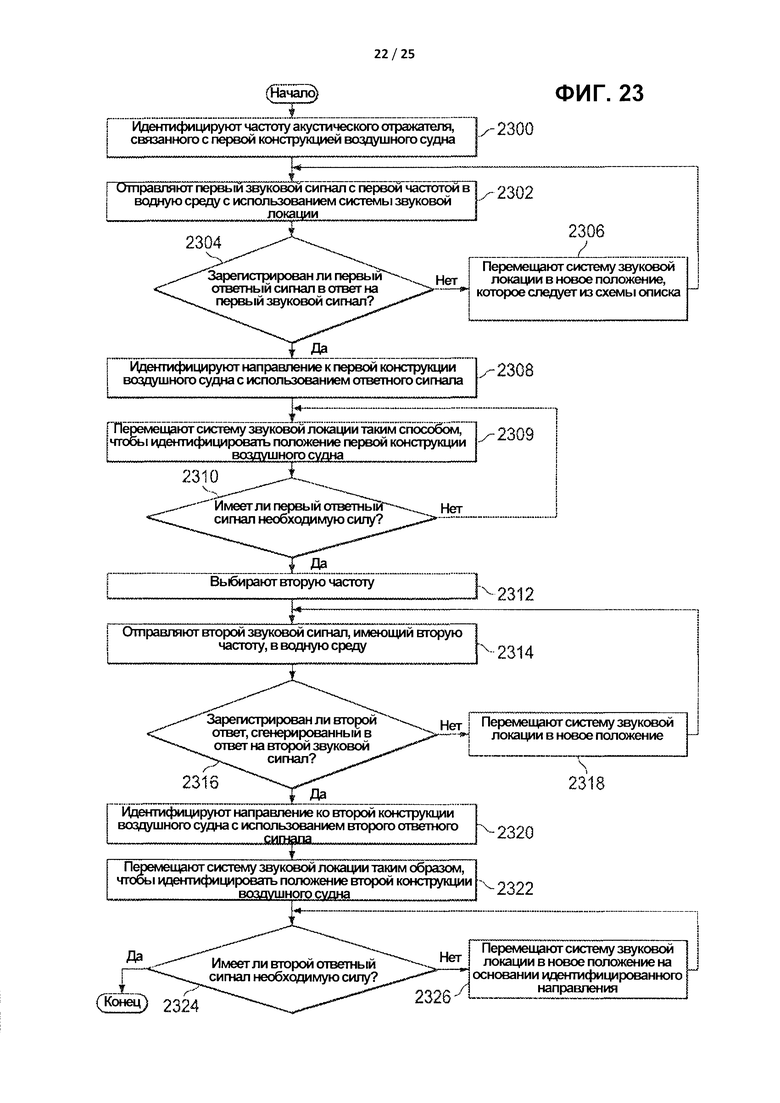
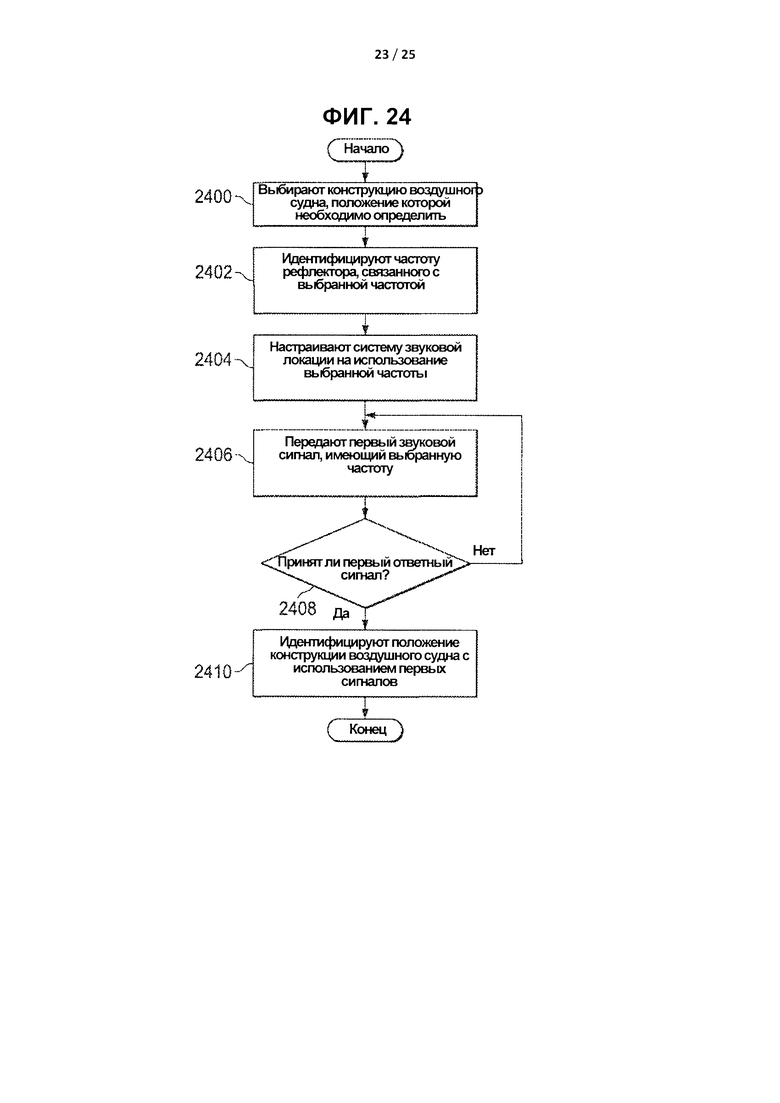
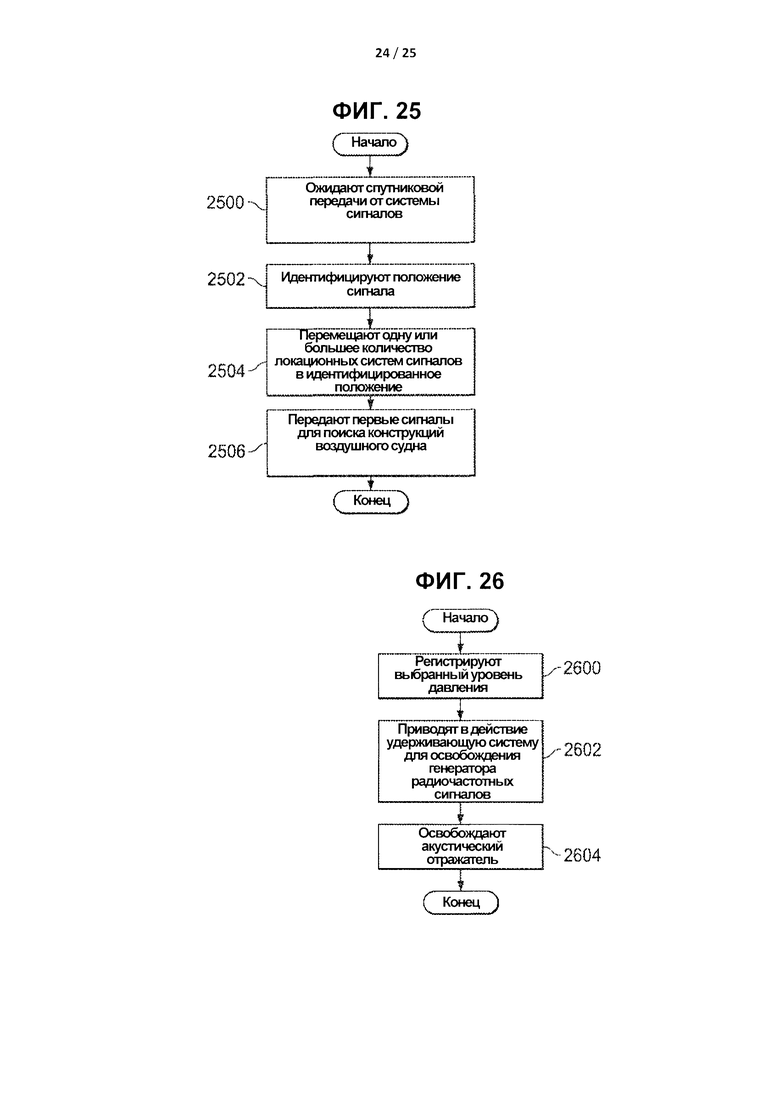
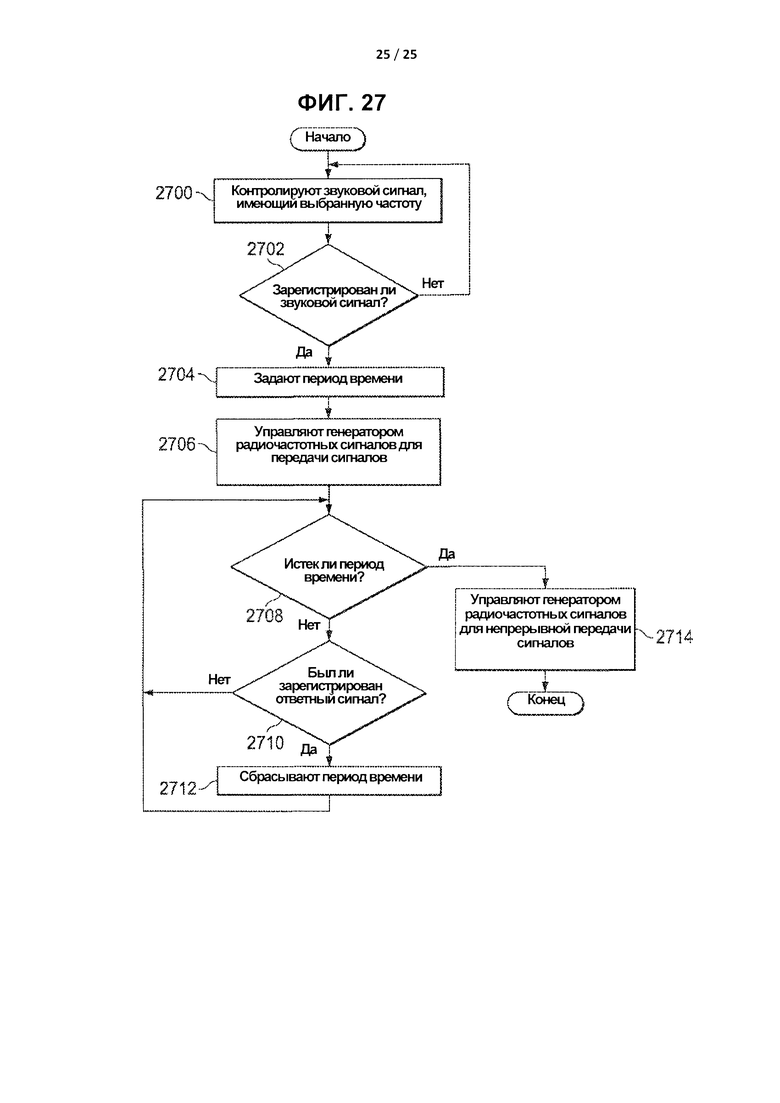
Предложены способ и устройство для локационной системы воздушного судна, содержащей конструкцию воздушного судна и множество акустических отражателей, связанных с указанной конструкцией воздушного судна. Множество акустических отражателей выполнено с возможностью генерирования первых звуковых сигналов в ответ на прием вторых звуковых сигналов. 4 н. и 18 з.п. ф-лы, 27 ил.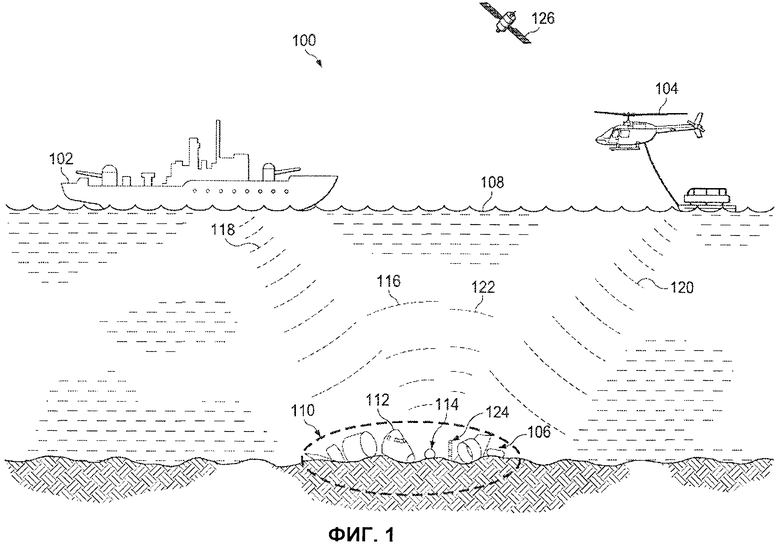
1. Локационная система (216) воздушного судна, содержащая:
конструкцию (404, 324) воздушного судна и
некоторое количество акустических отражателей, связанных с конструкцией (404, 324) воздушного судна, причем указанное некоторое количество акустических отражателей выполнено с возможностью генерирования первых звуковых сигналов (310) в ответ на прием вторых звуковых сигналов (316),
причем указанное некоторое количество акустических отражателей содержит:
первый акустический отражатель (312), выполненный с возможностью генерирования первых звуковых сигналов (310), имеющих первую частоту (332),
второй акустический отражатель (314), выполненный с возможностью генерирования первых звуковых сигналов (310), имеющих вторую частоту (336), которая отлична от первой частоты (332).
2. Система (216) по п. 1, в которой вторые звуковые сигналы (316) имеют частоту в диапазоне, выбранном для определения положения конструкции (404) воздушного судна.
3. Система (216) по п. 1, в которой первая частота первого акустического отражателя (312) обеспечивает возможность генерирования первых звуковых сигналов (310), имеющих первый диапазон, а вторая частота (336) второго акустического отражателя (314) обеспечивает возможность генерирования первых звуковых сигналов (310), имеющих второй диапазон, причем первый диапазон длиннее, чем второй диапазон.
4. Система (216) по п. 1, дополнительно содержащая:
генерирующую систему для генерирования сигналов, выполненную с возможностью приведения ее в действие посредством конкретного акустического отражателя из указанного некоторого количества акустических отражателей и с возможностью генерирования сигналов для определения положения конструкции (404) воздушного судна, когда она приведена в действие.
5. Система (216) по п. 4, в которой генерирующая система для генерирования сигналов содержит:
генератор (424) радиочастотного сигнала, выполненный с возможностью генерирования сигналов, когда он приведен в действие,
датчик (428), выполненный с возможностью регистрации первых звуковых сигналов (310), и
управляющее устройство (430), соединенное с генератором (424) радиочастотного сигнала и датчиком (428) и выполненное с возможностью приведения в действие указанного генератора (424) радиочастотного сигнала, когда датчик (428) регистрирует первые звуковые сигналы (310).
6. Система (216) по п. 5, в которой управляющее устройство (430) выполнено с возможностью приведения в действие генератора (424) радиочастотного сигнала в течение определенного периода времени в ответ на регистрацию датчиком (428) первых звуковых сигналов (310).
7. Система (216) по п. 1, в которой конструкция (404) воздушного судна имеет полость (408), в которой расположен акустический отражатель (402) из указанного некоторого количества акустических отражателей, причем полость (408) выполнена таким образом, что этот акустический отражатель (402) функционирует после непреднамеренного столкновения воздушного судна (202) с водной средой (108, 206, 1000), а конструкция (404) воздушного судна связана с воздушным судном (202).
8. Система (216) по п. 7, дополнительно содержащая:
канал, соединяющий внешнюю часть конструкции (404) воздушного судна с полостью (408), и
подвижную конструкцию (418), выполненную с возможностью открытия канала, причем вода совершает перемещение через канал в полость (408), когда конструкция (404) воздушного судна расположена под водой.
9. Система (216) по п. 7, дополнительно содержащая:
связывающий трос, имеющий первый конец, соединенный с конструкцией (404) воздушного судна, и второй конец, соединенный с акустическим отражателем из указанного некоторого количества акустических отражателей.
10. Система (216) по п. 1, дополнительно содержащая:
систему (240) звуковой эхолокации, выполненную с возможностью отправки вторых звуковых сигналов (316) и с возможностью регистрации первых звуковых сигналов (310).
11. Система (216) по п. 10, в которой акустический отражатель (402) из указанного некоторого количества акустических отражателей выполнен с возможностью генерирования первых звуковых сигналов (310), имеющих первую частоту (332), в ответ на прием вторых звуковых сигналов (316), имеющих первую частоту (332).
12. Система (216) по п. 1, в которой акустический отражатель (402) из указанного некоторого количества акустических отражателей имеет тип (601), выбранный из сферы (602), цилиндра (604) или трехплоскостного отражателя (606).
13. Система (216) по п. 1, в которой конструкция (404) воздушного судна имеет некоторое количество каналов (412), соединяющих внешнюю часть конструкции (404) воздушного судна с полостью (408).
14. Система (216) по п. 1, в которой конструкция (404) воздушного судна выполнена с возможностью защиты указанного некоторого количества акустических отражателей при наличии непреднамеренного столкновения воздушного судна (202), в котором расположена конструкция (404) воздушного судна, с водной средой (108, 206, 1000), причем указанное столкновение имеет динамическую нагрузку, составляющую приблизительно до 40g.
15. Система (216) по п. 1, в которой конструкция (404) воздушного судна выбрана из крыла, горизонтального стабилизатора, хвостового отсека, корпуса двигателя или воздушного судна.
16. Способ определения положения конструкций (404, 324) воздушного судна, включающий этапы, согласно которым:
регистрируют посредством спутника (126) радиочастотный сигнал, передаваемый от генератора (424) радиочастотного сигнала, связанного с конструкциями (404, 324) воздушного судна воздушного судна (402), которое непреднамеренно столкнулось с водной средой (108, 206, 1000),
идентифицируют приблизительное положение конструкций (404, 324) воздушного судна из радиочастотного сигнала,
отправляют первый звуковой сигнал в водную среду (108, 206, 1000) в некоторое положение на основании приблизительного положения конструкций (404, 324) воздушного судна, причем первый звуковой сигнал имеет первую частоту, которая соответствует первой выбранной частоте первого акустического отражателя, связанного с первой конструкцией (404) воздушного судна, и
отправляют второй звуковой сигнал в водную среду с использованием второй частоты, когда принят ответный сигнал от первого акустического отражателя, причем второй звуковой сигнал соответствует второй выбранной частоте второго акустического отражателя, связанного со второй конструкцией (324) воздушного судна, которое непреднамеренно столкнулось с водной средой,
идентифицируют положение конструкций (404, 324) воздушного судна, когда принят ответный сигнал от акустических отражателей, причем положение идентифицируют с использованием ответных сигналов от акустических отражателей,
при этом первая частота первого акустического отражателя обеспечивает возможность генерирования первого звукового сигнала, имеющего первый диапазон, а вторая частота второго акустического отражателя обеспечивает возможность генерирования первого звукового сигнала, имеющего второй диапазон, причем первый диапазон отличается от второго диапазона.
17. Способ по п. 16, согласно которому акустический отражатель имеет тип (601), выбранный из сферы (602), цилиндра (604) или трехплоскостного отражателя (606).
18. Локационная система (216) воздушного судна, содержащая:
систему (240) звуковой локации, выполненную с возможностью
отправки первого звукового сигнала (310), имеющего первую частоту (332), в водную среду,
причем первая частота (332) соответствует первому акустическому отражателю (312), который связан с первой конструкцией (404) воздушного судна воздушного судна (202), которое непреднамеренно столкнулось с водной средой (108, 206, 1000), и
отправки второго звукового сигнала (316) в водную среду (108, 206, 1000) с использованием второй частоты (336), когда принят ответный сигнал от первого акустического отражателя (312),
причем второй звуковой сигнал (316) соответствует второй частоте (336) второго акустического отражателя (314), связанного со второй конструкцией (324) воздушного судна (202), которое непреднамеренно столкнулось с водной средой (108, 206, 1000).
19. Система (216) по п. 18, дополнительно содержащая:
подвижную платформу (236), причем указанная система звуковой локации связана с подвижной платформой (236).
20. Система (216) по п. 19, в которой первая частота (332) первого акустического отражателя (312) обеспечивает возможность генерирования первого звукового сигнала (310), имеющего первый диапазон, а вторая частота (336) второго акустического отражателя (314) обеспечивает возможность генерирования первого звукового сигнала (310), имеющего второй диапазон, причем первый диапазон длиннее, чем второй диапазон.
21. Система (216) по п. 19 или 20, в которой первый акустический отражатель (312) и второй акустический отражатель (314) имеют тип, выбранный из сферы, цилиндра или трехплоскостного отражателя.
22. Воздушное судно (202), содержащее систему по п. 1 или 18.
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| СПОСОБ ПОЛУЧЕНИЯ КОМПОЗИЦИОННОГО МАТЕРИАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2470783C2 |
| US3945338 A, 23.03.1976 | |||
| Способ электролитического получения алюминия в электролизерах с самообжигающимся анодом | 1992 |
|
SU1836495A3 |
| US2003152145 A1, 14.08.2003. | |||

