Область техники
Настоящее изобретение относится к способу эксплуатации сельскохозяйственной рабочей машины в соответствии с ограничительной частью пункта 1 и к сельскохозяйственной рабочей машине в соответствии с ограничительной частью пункта 8 формулы изобретения.
Уровень техники
Из патентного документа EP 1378863 A1 известна система документирования эксплуатации и состояния навесного рабочего аппарата или приставки, которая может присоединяться к уборочной машине. Для этого устройством восприятия эксплуатационных параметров генерируется сигнал эксплуатационных параметров, содержащий данные по эксплуатации присоединяемой приставки. Сигнал эксплуатационных параметров подается на запоминающее устройство, записывающее информацию по документированию эксплуатации, которая выводится из сигнала эксплуатационных параметров или соответствует ей. Запоминающее устройство расположено на приставке и считывается считывающим устройством. Считываемые сигналы эксплуатационных параметров передаются через шинную систему на систему бортового компьютера рабочей машины. В качестве эксплуатационных параметров в запоминающем устройстве записываются часы эксплуатации, обработанная площадь, механическая нагрузка на приводную трансмиссию, эксплуатационная скорость, расход убранной массы, вид убираемой культуры и характеристики окружающей среды, такие как температура, осадки, или информация о месте использования, получаемая от спутниковой системы определения положения.
Как правило, на сельскохозяйственных рабочих машинах используются различные навесные аппараты или приставки, которые заменяются, например, в зависимости от различных этапов обработки или от вида культуры, подлежащей уборке. Так, например, замена приставки может быть необходима в течение одного рабочего дня при смене вида убираемой культуры, что связано с большими затратами времени на восприятие и настройку рабочих параметров присоединенной приставки в устройстве управления рабочей машины. При этом для обеспечения выполнения различных функций приставки после замены требуется калибровка. Так, для функций управления высотным положением мотовила или высотным положением жатвенного аппарата при копировании рельефа почвы требуется калибровка необходимых для управления датчиков. Кроме того, неправильная настройка зависящих от приставки функций оператором может приводить к тому, что не обеспечивается оптимальная эксплуатация приставки. Предусмотренная в EP 1378863 A1 запись данных в запоминающем устройстве непригодна для того, чтобы освободить оператора самоходной сельскохозяйственной рабочей машины от калибровки и новой настройки рабочих или эксплуатационных параметров навесного аппарата или приставки после их замены.
Раскрытие изобретения
Таким образом, задачей настоящего изобретения является создание способа эксплуатации самоходной рабочей машины и самоходной рабочей машины для осуществления способа, которые обеспечивают возможность снижения времени на оснащение и настройку при установке или замене навесного аппарата или приставки.
В соответствии с изобретением решение задачи обеспечивается отличительными признаками по пункту 1 и независимому пункту 8 формулы изобретения.
Согласно пункту 1 предложено, что при присоединении навесного аппарата или приставки к рабочей машине посредством шинной системы инициируют обмен данными между управляющим блоком навесного аппарата или приставки и устройством управления рабочей машины, а на основе полученных от устройства управления данных посредством управляющего блока проверяют, является ли устройство управления автоматически конфигурируемым посредством управляющего блока. Результат проверки данных является свидетельством того, может ли устройство управления рабочей машины автоматически конфигурироваться для навесного аппарата или приставки или оно должно конфигурироваться вручную оператором, чтобы принять на себя управление эксплуатацией навесного аппарата или приставки.
Если установлено, что устройство управления может конфигурироваться автоматически, за счет проведения автоматической конфигурации может быть значительно снижено время на оснащение и настройку при замене навесного аппарата или приставки. Автоматически настраиваются характерные для рабочего аппарата параметры и записанные в памяти заданные величины. Это обеспечивает возможность снижения ошибок настройки и ошибок операторской настройки. Если в противоположность этому устанавливается несовместимость, оператор информируется об этом обстоятельстве, чтобы выполнить ручную конфигурацию устройства управления для ввода в эксплуатацию навесного аппарата или приставки.
При этом при положительном результате проверки в отношении возможности автоматической конфигурации данных с помощью управляющего блока от устройства управления запрашивается разрешение на однозначную идентификацию рабочей машины. Благодаря этому в случае автоматической конфигурации устройства управления рабочей машины управляющим блоком навесного аппарата или приставки не может происходить непреднамеренной передачи данных, что могло бы приводить к ошибочной настройке или к ошибочным функциям.
Далее, запрошенные для идентификации данные могут оцениваться управляющим блоком в отношении того, соединялся ли уже присоединенный навесной аппарат или приставка ранее с рабочей машиной. Таким путем может быть автоматически установлено, эксплуатировался ли навесной аппарат или приставка в прошлом, по меньшей мере один раз с рабочей машиной, то есть известна ли рабочая машина навесному аппарату или приставке.
При положительном результате оценки управляющим блоком записанные в нем рабочие данные передают в устройство управления с тем, чтобы на их основе обеспечить возможность автоматической калибровки и настройки навесного аппарата или приставки. Благодаря этому обеспечивается оптимальная рабочая эксплуатация навесного аппарата или приставки и рабочей машины, так как автоматически передаются и настраиваются характерные параметры для взаимодействия данного навесного аппарата или приставки и рабочей машины. В этом случае оператор может быть полностью освобожден от необходимости конфигурации. В устройстве управления автоматически настраиваются заданные величины для эксплуатации навесного аппарата или приставки. Кроме того, благодаря этому снижается вероятность ошибок настройки и операторского обслуживания.
В противоположность этому при отрицательном результате оценки управляющим блоком записанные в нем базовые данные передают на устройство управления с тем, чтобы на их основе осуществить калибровку навесного аппарата или приставки для первого ввода в эксплуатацию и выполнить основную настройку. Передача базовых данных для навесного аппарата или приставки образует исходную точку для последующей эксплуатации на рабочей машине.
Далее, после ручной калибровки и основной настройки навесного аппарата или приставки с помощью устройства управления рабочей машины эти данные могут передаваться на управляющий блок и записываться в его память.
Кроме того, после ручной калибровки и основной настройки навесного аппарата или приставки данные для идентификации рабочей машины могут передаваться от устройства управления на управляющий блок и записываться в его память. Таким путем при новом присоединении навесного аппарата или приставки к рабочей машине возможно ее опознание управляющим блоком, так что записанные в управляющем блоке рабочие данные могут использоваться для автоматической конфигурации, то есть эти данные могут быть переданы от управляющего блока на устройство управления уборочной машины.
Согласно независимому пункту 8 формулы изобретения предложена самоходная рабочая машина для выполнения способа, при этом при присоединении навесного аппарата или приставки к рабочей машине посредством шинной системы обеспечена возможность инициации обмена данными между управляющим блоком навесного аппарата или приставки и устройством управления рабочей машины, и на основе полученных от устройства управления данных с помощью управляющего блока обеспечена возможность проверки, является ли устройство управления автоматически конфигурируемым посредством управляющего блока.
Предпочтительно управляющий блок может быть выполнен с возможностью настройки исполнительных органов на навесном аппарате или приставке. Это может достигаться в устройстве управления посредством реализации функций приставки, в частности, при управлении высотным положением мотовила, выполнении функции копирования поверхности почвы, функции настройки длины составного режущего стола и других функций. Это равным образом относится к таким приставкам как кукурузная приставка или початкособиратель, а также к выполненным в виде тракторов рабочим машинам с присоединяемым к ним навесным аппаратам, таким как опрыскиватели, сеялки, валкователи, косилки, фронтальные погрузчики и подобные аппараты.
В предпочтительном решении по развитию изобретения управляющий блок может находиться в рабочей связи с расположенными на навесном аппарате или приставке датчиками.
В частности, линии подвода устройства управления рабочей машины и управляющего блока навесного аппарата или приставки могут быть выполнены с возможностью соединения с помощью соединительных элементов, которые помимо электрических проводов дополнительно содержат устройство сопряжения с шинной системой для соединения шинных систем рабочей машины и навесного аппарата или приставки. За счет реализации функций навесного аппарата или приставки в управляющем блоке может быть снижена сложность сопряжения между рабочей машиной и навесным аппаратом или приставкой. Одновременно повышается надежность соединения между соединительными элементами. Следующее преимущество состоит в том, что снижается сложность модульного программного обеспечения устройства управления рабочей машины, поскольку можно полностью или по меньшей мере частично обойтись без модулей программного обеспечения для навесного рабочего аппарата или приставки.
Краткий перечень чертежей
Далее со ссылками на прилагаемые чертежи будут подробно описаны примеры осуществления изобретения. На чертежах:
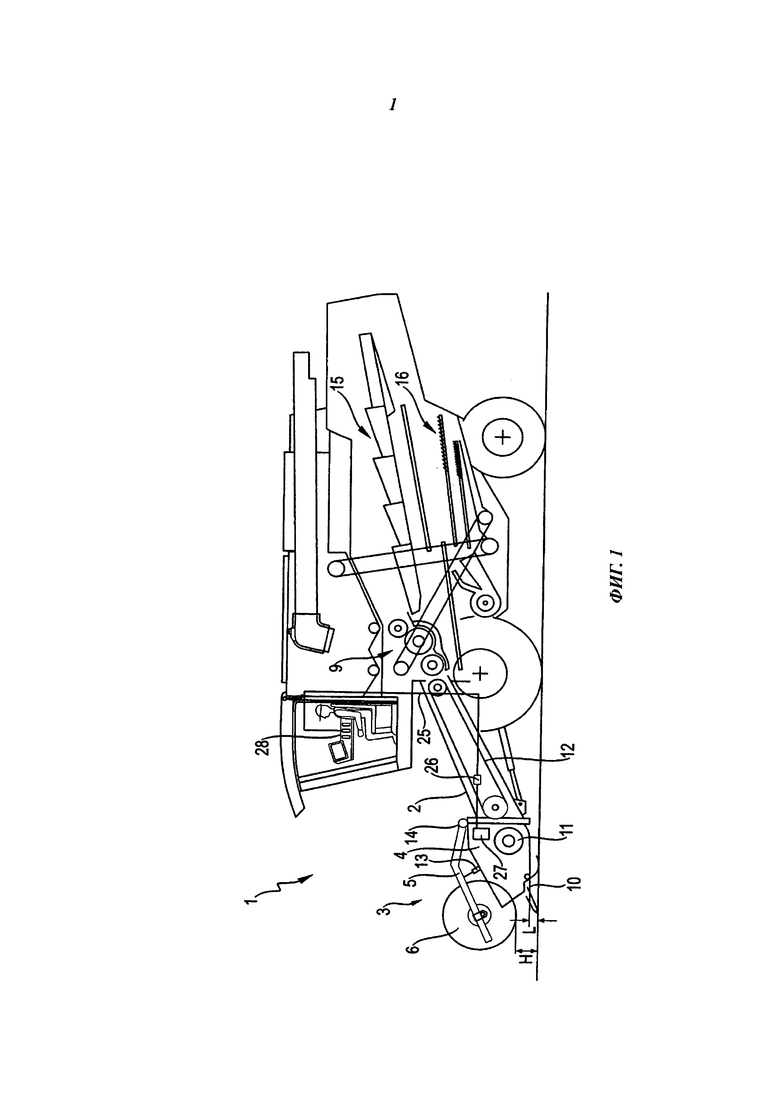
фиг. 1 схематично изображает на виде сбоку зерноуборочный комбайн;
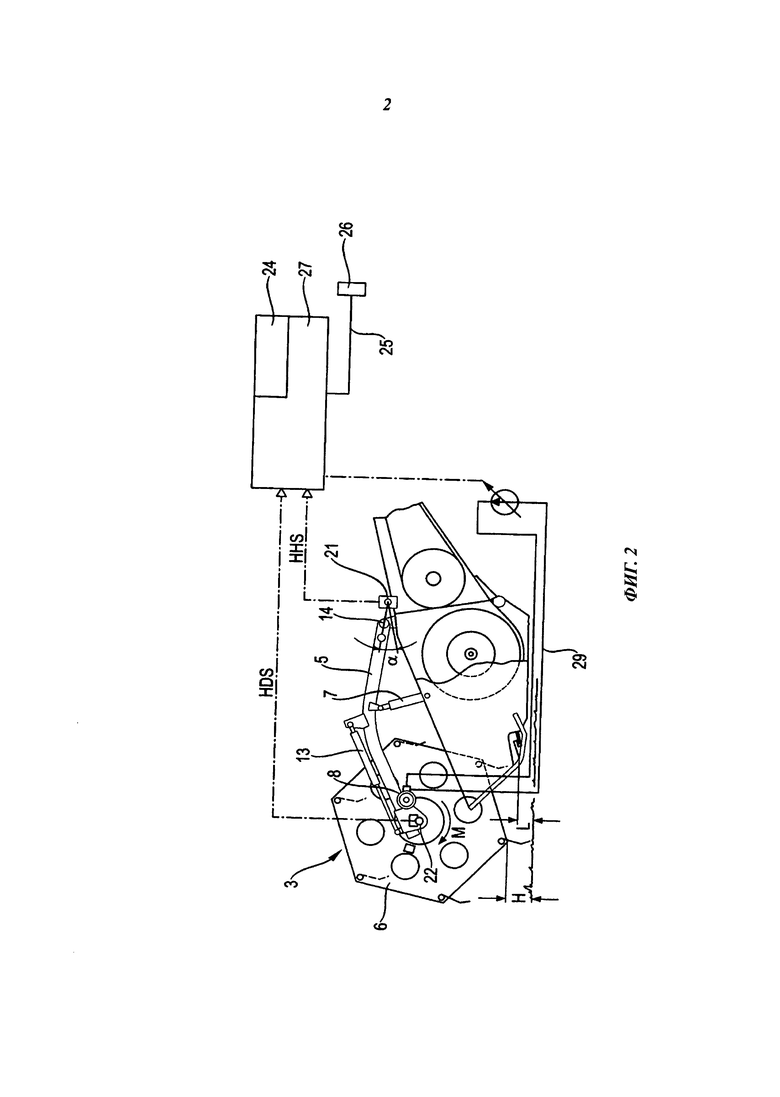
фиг. 2 изображает в увеличенном виде часть жатвенного аппарата комбайна;
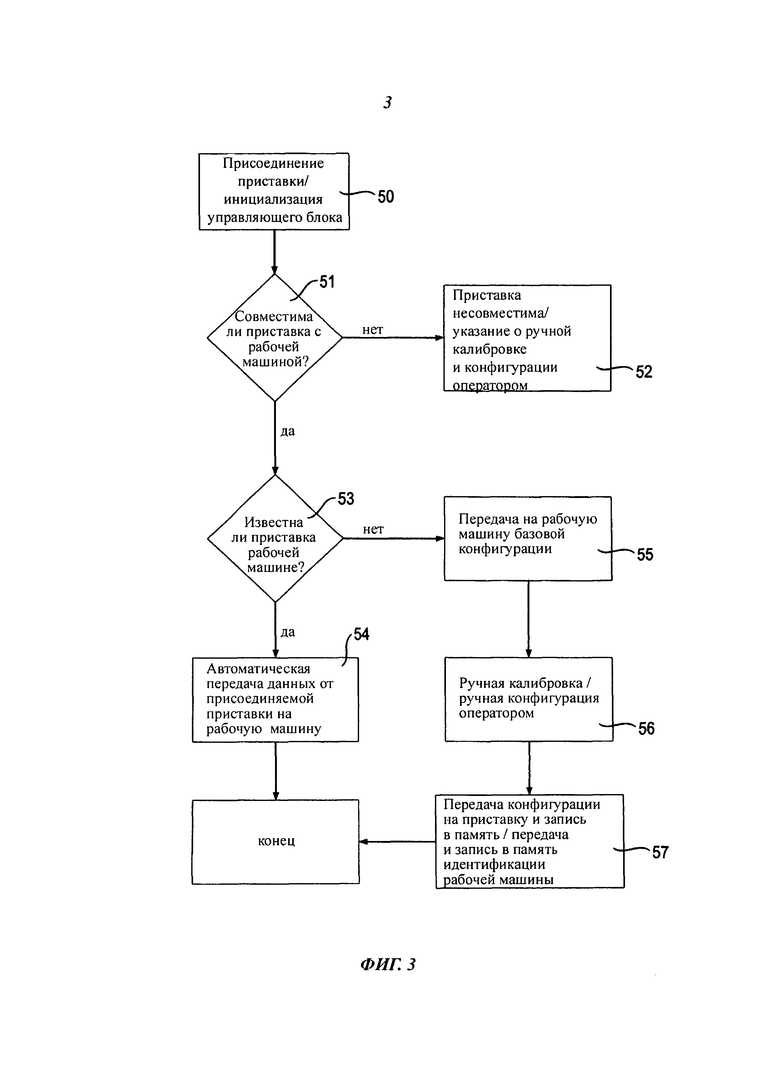
фиг. 3 изображает блок-схему для иллюстрации способа.
Осуществление изобретения
Настоящее изобретение будет описано на примере зерноуборочного комбайна в качестве сельскохозяйственной рабочей машины и присоединенного к комбайну жатвенного аппарата в качестве приставки. Сельскохозяйственной рабочей машиной может быть также полевой измельчитель или трактор. В качестве приставок помимо различных вариантов режущих аппаратов могут использоваться также кукурузный початкособиратель, подборщик или кукурузная приставка. Навесным аппаратом могут быть валкователи, ворошилки, косилки, опрыскиватели и подобные аппараты.
На фиг. 1 показан на виде сбоку зерноуборочный комбайн 1 с поворотным в вертикальной плоскости питателем 2, на котором расположена приставка, выполненная в виде жатвенного аппарата 3. С помощью поворотного питателя 2 жатвенный аппарат 3 может быть установлен на желаемой высоте L срезки. Жатвенный аппарат 3 состоит из режущего стола 4 и двух поворотных по высоте несущих рычагов 5 мотовила 6, укрепленного на режущем столе 4. Между режущим столом 4 и несущими рычагами 5 мотовила шарнирно укреплены два гидроцилиндра 7, с помощью которых несущие рычаги 5 мотовила поворачиваются вокруг шарнирной точки 14 и при этом изменяют высотное положение мотовила 6. Дополнительно между несущими рычагами 5 мотовила и мотовилом 6 установлены два других гидроцилиндра 13, с помощью которых регулируется положение мотовила относительно режущего стола 4 в горизонтальном направлении, как это показано на фиг. 2.
Мотовило 6, приводимое во вращение мотором, выполненным в виде гидромотора 8, обеспечивает непрерывный прием убираемой массы и ее равномерную подачу через жатвенный аппарат 3 и питатель 2 к молотильному устройству 9 комбайна 1, которое само по себе известно и здесь подробно не описывается. Убираемая масса срезается режущим брусом 10, расположенным на передней кромке режущего стола 4, а затем срезанная убранная масса с помощью мотовила 6 подается к расположенному внутри режущего стола 4 приводимому во вращение приемному шнеку 11. Приемный шнек 11 направляет убранную массу к питателю 2. В шахте питателя 2 движется наклонный конвейер 12, который транспортирует убранную массу дальше к молотильному устройству 9. За молотильным устройством 9 расположено сепарирующее устройство 15, здесь в виде клавишного соломотряса. Альтернативно сепарирующее устройство 15 может быть выполнено в виде сепарирующего ротора. Выдаваемая молотильным устройством 9 и сепарирующим устройством 15 убранная масса подается к очистному устройству 16. Управление рабочими аппаратами зерноуборочного комбайна 1 осуществляется устройством 28 управления, которое связано шинной системой 25 с рабочими аппаратами для управления ими или для их регулирования. Устройство 28 управления содержит блок индикации, блок обработки данных и блок ввода. Далее, с помощью соединительных элементов 26 к шинной системе 25 присоединен управляющий блок 27, расположенный на жатвенном аппарате 3.
Для оптимального приема убранной массы жатвенный аппарат 3 выполнен подвижным с возможностью регулирования его положения по высоте и поперечного наклона. Вертикальное регулирование по высоте, то есть выравнивание продольного наклона в направлении движения, и изменение поперечного наклона жатвенного аппарата 3 производятся в зависимости от действительного уровня почвы и служат для обеспечения равномерной высоты стерни убранной массы.
На фиг. 2 показан участок жатвенного аппарата 3 зерноуборочного комбайна 1 по фиг. 1, включая расположенные на нем датчики 21, 22 и оснащенный памятью 24 данных и микропроцессором управляющий блок 27, который служит для управления жатвенным аппаратом 3. Мгновенная высота Н мотовила 6 измеряется установленным в шарнирной точке 14 датчиком 21 угла поворота, который измеряет угол а поворота несущих рычагов 5 мотовила. Вырабатываемый датчиком 21 угла поворота сигнал HHS прямо пропорционален высоте Н положения мотовила.
Гидромотор 8 приводится гидравлической приводной системой 29. В гидравлической приводной системе 29 встроен датчик 22 давления, воспринимающий гидравлическое давление, которое изменяется в зависимости от крутящего момента М мотовила. Вырабатываемый датчиком 22 сигнал HDS пропорционален нагрузке, действующей на мотовило 6. Нагрузка мотовила 6 определяется посредством определения действующего на мотовило 6 тягового усилия FH, которое определяется крутящим моментом М мотовила. Сигналы HHS и HDS подаются к связанному с датчиком 21 угла поворота и датчиком 22 давления управляющему блоку 27, который управляет гидравлической приводной системой 29.
Далее, может быть предусмотрено, что жатвенный аппарат содержит лоток жатвенного аппарата, который состоит из неподвижной части и подвижной части для того, чтобы иметь возможность изменять длину режущего стола при обработке различных видов убираемой культуры. При изменении положения подвижной части лотка жатвенного аппарата относительно неподвижной части должно обеспечиваться, чтобы при любой возможной установке режущего бруса мотовило не сталкивалось с ним. Для этого непрерывно определяется положение подвижной части лотка относительно неподвижной части, и для целей сохранения наименьшего расстояния мотовила от режущего бруса требуемое наименьшее высотное положение мотовила регулируется в соответствии с конкретным относительным положением посредством срабатывания электромагнитных клапанов. В простом примере осуществления с боковой стенкой подвижной части лотка соединена криволинейная направляющая, с которой взаимодействует укрепленный на мотовиле датчик, причем датчик воздействует на электромагнитные клапаны блока силовых цилиндров, которые предусмотрены для подъема и опускания мотовила. Управление подвижной частью лотка и мотовилом осуществляется также управляющим блоком жатвенного аппарата.
Для надлежащего выполнения указанных функций при замене присоединяемого рабочего аппарата в принципе требуется проводить калибровку датчиков 21, 22 и вводить новые данные конфигурации. Для того, чтобы освободить оператора от этой трудоемкой задачи предложен способ эксплуатации сельскохозяйственной рабочей машины, здесь зерноуборочного комбайна 1, согласно которому при присоединении жатвенного аппарата 3 к комбайну 1 через шинную систему 25 инициируется обмен данными между управляющим блоком 27 жатвенного аппарата 3 и устройством 28 управления зерноуборочного комбайна 1. При этом на основе данных, получаемых управляющим блоком 27 от устройства 28 управления, проверяется, может ли присоединенный сменный аппарат автоматически конфигурироваться устройством 28 управления.
Соединение между жатвенным аппаратом 3 или приставкой и комбайном 1 или, соответственно, сельскохозяйственной рабочей машиной осуществляется с помощью соединительных элементов 26 типа штекерных разъемов, которые помимо соединения электрических проводов обеспечивают также сопряжение с шинной системой. В качестве шинной системы 25 для присоединяемого аппарата 3 и рабочей машины 1 может использоваться, например, шина CAN, локальные сети LIN, Flexray, сеть Ethernet или другие системы.
На фиг. 3 показана блок-схема, на основе которой будет пояснен способ эксплуатации сельскохозяйственной рабочей машины с присоединяемой к ней приставкой, в данном примере осуществления способ эксплуатации зерноуборочного комбайна 1. Исходной точкой способа является присоединение приставки, здесь жатвенного аппарата 3, к сельскохозяйственной машине, выполненной в виде зерноуборочного комбайна 1. Продолжительность монтажа и настройки может быть снижена, когда имеющиеся данные калибровки и конфигурации могут быть переданы на устройство 28 управления зерноуборочного комбайна 1.
На первом шаге 50 за счет соединения шинной системы 25 жатвенного аппарата 3 с шинной системой 25 комбайна 1 инициализируется управляющий блок 27 жатвенного аппарата 3. Другими словами, физическое подсоединение приставки к шинной системе 25 комбайна 1 и, следовательно, к его источнику тока, запускает выполнение способа управляющим блоком 27. Управляющий блок жатвенного аппарата 3 и устройство управления комбайна вступают в обмен данными через шинную систему 25.
В ходе первого запроса 51 проверяется, совместимы ли жатвенный аппарат 3 и комбайн 1, то есть может ли устройство 28 управления комбайна 1 автоматически конфигурироваться посредством управляющего блока 27 жатвенного аппарата 3.
Проверяется, могут ли быть переданы на устройство 28 управления и записаны в нем записанные в управляющем блоке 27 данные, такие как тип приставки, серийный номер, часы эксплуатации, счетчик технического обслуживания, рабочая ширина и вес присоединяемого аппарата, гидравлическая схема, записанные заданные величины для ведения на почве жатвенного аппарата 3, мотовила 6, режущего стола 4, расстояний скоб-копиров и подобные данные.
Если в ходе первого запроса 51 устанавливается, что между жатвенным аппаратом 3 и зерноуборочным комбайном 1 имеется совместимость в указанном отношении, в ходе последующего второго запроса 53 проверяется, присоединялся ли жатвенный аппарат 3 уже однажды к комбайну 1. Эта проверка осуществляется путем запроса от управляющего блока 27 информации, которая обеспечивает возможность однозначной идентификации комбайна 1.
Если результат этого второго запроса 53 положителен, на втором шаге 54 обмен данными между управляющим блоком 27 и устройством 28 управления предпринимается снова, и записанные для идентифицированного комбайна данные для целей калибровки и конфигурации передаются через шинную систему 25 на устройство 28 управления. Способ заканчивается успешной передачей данных от управляющего блока 27 на устройство 28 управления.
Если в ходе первого запроса 51 устанавливается несовместимость жатвенного аппарата 3 и зерноуборочного комбайна 1, то есть что устройство 28 управления зерноуборочного комбайна 1 не может автоматически конфигурироваться управляющим блоком 27 жатвенного аппарата 3, на шаге 52 способа оператору выдается соответствующее указание на блоке индикации и ввода устройства 28 управления комбайна 1. В соответствии с ним оператору надлежит самостоятельно предпринять необходимую калибровку жатвенного аппарата 3 и конфигурацию устройства 28 управления комбайна 1.
В том случае, когда согласно первому запросу 51 имеется совместимость между жатвенным аппаратом 3 и зерноуборочным комбайном 1, однако жатвенный аппарат 3 присоединяется к комбайну 1 в первый раз, второй запрос 53 приводит к отрицательному результату. Для того, чтобы несмотря на это можно было ускорить процесс монтажа и настройки, согласно первому промежуточному шагу 55 предусмотрено, что от управляющего блока 27 на устройство 28 управления автоматически передается записанная в нем базовая конфигурация, которая содержит данные, например, о типе приставки, ширине, весе, проработанных часах и подобные данные.
За первым промежуточным шагом 55 следует второй промежуточный шаг 56, согласно которому оператором вручную проводится калибровка жатвенного аппарата 3, требуемая для его ввода в эксплуатацию. Этот второй промежуточный шаг 56 также поддается автоматизации путем того, что в устройстве 28 управления записан алгоритм, который в зависимости от присоединенного аппарата автоматически выполняет шаги, необходимые для калибровки.
После завершения калибровки и, при необходимости, конфигурации записанная в устройстве 28 управления конфигурация, включая величины калибровки для присоединенной приставки 3, передается на управляющий блок 27. Эти данные объединяются с информацией для однозначной идентификации рабочей машины, то есть зерноуборочного комбайна 1, и записываются в память управляющего блока 27. Это выполняется на третьем шаге 57, который может запускаться вручную оператором или проводиться автоматически, например, после того, как оператор подтвердил процесс калибровки и конфигурации впервые присоединенной приставки путем соответствующего квитирования запроса через устройство 28 управления.
Перечень позиций
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНАЯ УБОРОЧНАЯ МАШИНА И СПОСОБ УПРАВЛЕНИЯ САМОХОДНОЙ УБОРОЧНОЙ МАШИНОЙ | 2014 |
|
RU2638189C2 |
| СЕЛЬХОЗМАШИНА С ФУНКЦИЕЙ ЭКСТРЕННОЙ ОСТАНОВКИ | 2009 |
|
RU2492619C2 |
| ЗЕРНОУБОРОЧНЫЙ АГРЕГАТ | 2016 |
|
RU2625178C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОВЕРХНОСТНОЙ ВЛАЖНОСТИ | 2005 |
|
RU2361385C2 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА СЕЛЬХОЗМАШИНЫ | 2007 |
|
RU2420945C2 |
| РАБОЧАЯ СЕЛЬХОЗМАШИНА | 2007 |
|
RU2436278C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ СИСТЕМЫ "АССИСТЕНТ ВОДИТЕЛЯ" ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2014 |
|
RU2566990C9 |
| СПОСОБ ЭКСПЛУАТАЦИИ СИСТЕМЫ "АССИСТЕНТ ВОДИТЕЛЯ" ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ РАБОЧЕЙ МАШИНЫ | 2014 |
|
RU2566658C9 |
| ЖАТКА ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 2011 |
|
RU2477599C1 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2019 |
|
RU2796063C2 |
Изобретение относится к области сельскохозяйственного машиностроения, в частности к способу эксплуатации сельскохозяйственной рабочей машины и, по существу, к такой сельскохозяйственной машине. К сельскохозяйственной рабочей машине присоединены навесной аппарат или приставка, управляемые относящимся к рабочей машине устройством управления. Навесной аппарат или приставка присоединены к рабочей машине с помощью шинной системы для инициирования обмена данными между управляющим блоком навесного аппарата или приставки и устройством управления рабочей машины, а на основе полученных от устройства управления данных управляющим блоком проверяется, является ли устройство управления автоматически конфигурируемым посредством управляющего блока. 2 н. и 12 з.п. ф-лы, 3 ил.
1. Способ эксплуатации сельскохозяйственной рабочей машины (1), к которой присоединены навесной аппарат или приставка (3), управляемые относящимся к рабочей машине (1) устройством (28) управления, отличающийся тем, что при присоединении навесного аппарата или приставки (3) к рабочей машине (1) посредством шинной системы (25) инициируют обмен данными между управляющим блоком (27) навесного аппарата или приставки (3) и устройством (28) управления рабочей машины (1), и на основе полученных от устройства (28) управления данных посредством управляющего блока (27) проверяют, является ли устройство (28) управления автоматически конфигурируемым посредством управляющего блока (27).
2. Способ по п. 1, отличающийся тем, что при положительном результате проверки с помощью управляющего блока (27) от устройства (28) управления запрашивают разрешение на однозначную идентификацию рабочей машины (1).
3. Способ по п. 2, отличающийся тем, что запрошенные данные для идентификации оценивают посредством управляющего блока (27) для определения того, соединялся ли присоединенный навесной аппарат или приставка (3) ранее с рабочей машиной (1).
4. Способ по п. 3, отличающийся тем, что при положительном результате оценки управляющим блоком (27) записанные в нем рабочие данные передают на устройство (28) управления с тем, чтобы на их основе обеспечить возможность автоматической калибровки и настройки навесного аппарата или приставки (3).
5. Способ по п. 3, отличающийся тем, что при отрицательном результате оценки управляющим блоком (27) записанные в нем базовые данные передают на устройство (28) управления с тем, чтобы на их основе осуществить калибровку навесного аппарата или приставки (3) для первого ввода в эксплуатацию и выполнить основную настройку.
6. Способ по п. 1, отличающийся тем, что после ручной калибровки и основной настройки навесного аппарата или приставки (3) с помощью устройства (28) управления рабочей машины (1) эти данные передают на управляющий блок (27) и записывают в его память.
7. Способ по п. 6, отличающийся тем, что после ручной калибровки и основной настройки навесного аппарата или приставки (3) данные для идентификации рабочей машины (1) передают от устройства (28) управления на управляющий блок (27) и записывают в его память.
8. Сельскохозяйственная рабочая машина (1), к которой присоединен навесной аппарат или приставка (3), управляемые относящимся к рабочей машине (1) устройством (28) управления, оснащенная для выполнения способа по любому из пп. 1-7, отличающаяся тем, что при присоединении навесного аппарата или приставки (3) к рабочей машине (1) посредством шинной системы (25) обеспечена возможность инициации обмена данными между управляющим блоком (27) навесного аппарата или приставки (3) и устройством (28) управления рабочей машины (1), и на основе полученных от устройства (28) управления данных с помощью управляющего блока (27) обеспечена возможность проверки, является ли устройство (28) управления автоматически конфигурируемым посредством управляющего блока (27).
9. Рабочая машина (1) по п.8, отличающаяся тем, что управляющий блок (27) выполнен с возможностью настройки исполнительных органов (7, 8, 13) на навесном аппарате или приставке (3).
10. Рабочая машина (1) по п. 8 или 9, отличающаяся тем, что управляющий блок (27) находится в рабочей связи с расположенными на навесном аппарате или приставке (3) датчиками (21, 22).
11. Рабочая машина (1) по п. 8 или 9, отличающаяся тем, что линии подвода устройства (28) управления рабочей машины (1) и управляющего блока (27) навесного аппарата или приставки (3) выполнены с возможностью соединения с помощью соединительных элементов (26), которые помимо электрических проводов дополнительно содержат устройство сопряжения с шинной системой для соединения шинных систем (25) рабочей машины (1) и навесного аппарата или приставки (3).
12. Рабочая машина (1) по п. 8 или 9, отличающаяся тем, что рабочая машина выполнена в виде зерноуборочного комбайна, полевого измельчителя или трактора.
13. Рабочая машина (1) по п. 8 или 9, отличающаяся тем, что присоединяемая к рабочей машине приставка выполнена в виде жатвенного аппарата, косилки, подборщика или кукурузной приставки.
14. Рабочая машина (1) по п. 8 или 9, отличающаяся тем, что присоединяемый к рабочей машине навесной аппарат выполнен в виде валкователя, ворошилки, косилки или фронтального погрузчика.
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2009 |
|
RU2402896C1 |
| Уборочный комбайн | 1987 |
|
SU1547760A1 |
| EA 201001494 A1, 29.04.2011 | |||
| АМПЛИТУДНЫЙ ДЕТЕКТОР | 1991 |
|
RU2018981C1 |
| US 5524424 A, 11.06.1996 | |||
| US 7748489 B2, 06.07.2010. | |||

