сд
- 1 i
о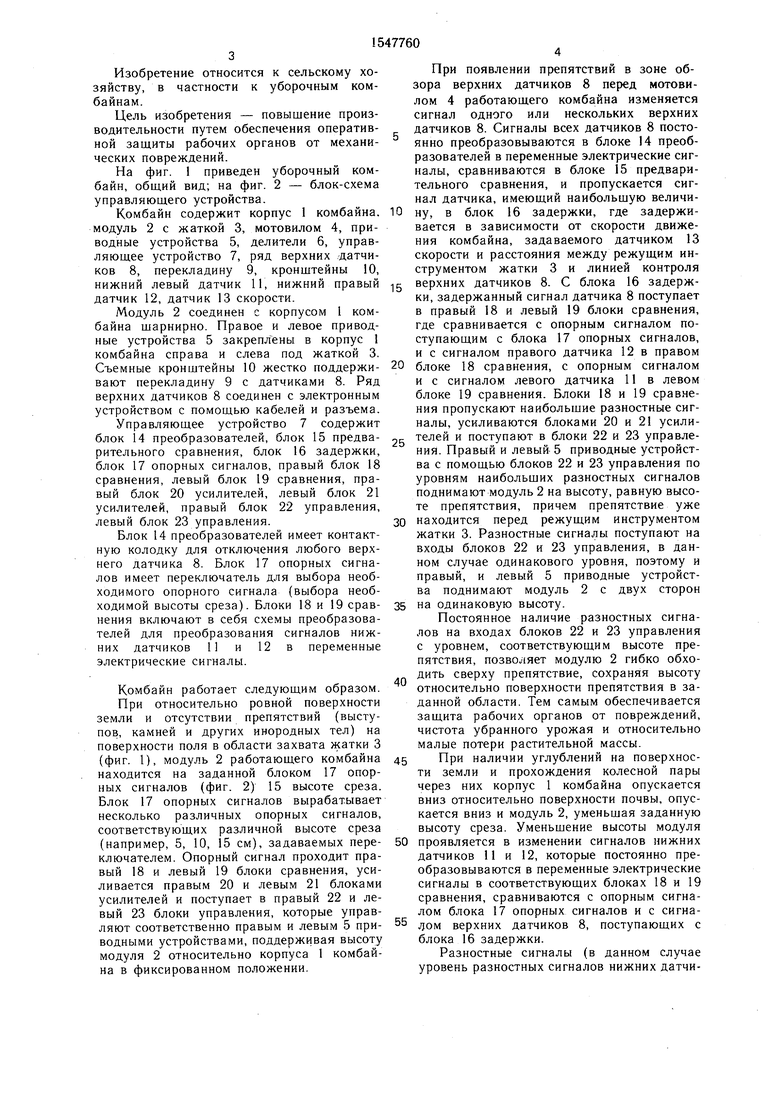
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ПАРАМЕТРОМ УБОРОЧНОЙ ЖАТКИ | 2019 |
|
RU2747303C2 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2009 |
|
RU2402896C1 |
| УПРАВЛЕНИЕ ВЫСОТОЙ МОТОВИЛА ДЛЯ ГИБКОЙ ПЛАТФОРМЕННОЙ ЖАТКИ В СЕЛЬСКОХОЗЯЙСТВЕННОЙ УБОРОЧНОЙ МАШИНЕ | 2007 |
|
RU2454061C2 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2013 |
|
RU2551106C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА С УСТРОЙСТВОМ ДЕТЕКТИРОВАНИЯ ОКРУЖАЮЩЕГО ПРОСТРАНСТВА | 2016 |
|
RU2731733C2 |
| УСТРОЙСТВО ДЛЯ УБОРКИ СЕЛЬСКОХОЗЯЙСТВЕННОЙ КУЛЬТУРЫ (ВАРИАНТЫ) | 2019 |
|
RU2784488C2 |
| СРЕДСТВО РЕГУЛИРОВАНИЯ ВЫСОТЫ ЖАТКИ С КОМПЕНСАЦИЕЙ ПРОГИБА ШИН | 2012 |
|
RU2607104C2 |
| САМОХОДНАЯ УБОРОЧНАЯ МАШИНА С ЖАТКОЙ И СПОСОБ УПРАВЛЕНИЯ ЖАТКОЙ | 2013 |
|
RU2630230C2 |
| ЖАТКА ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 1997 |
|
RU2118879C1 |
| СПОСОБ РАБОТЫ ЖАТКИ, ЖАТКА И ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2017 |
|
RU2756181C2 |
Изобретение относится к сельскому хозяйству, в частности к уборочным комбайнам. Цель изобретения - повышение производительности путем обеспечения оперативной защиты рабочих органов от механических повреждений. Модуль с жаткой и мостовилом шарнирно соединен с корпусом комбайна. Правое и левое приводные устройства установлены между модулем и корпусом комбайна. Ряд верхних бесконтактных датчиков 8 закреплена на перекладине П-образной рамы. Перекладина выдвинута вперед и расположена над несжатым стеблестоем. В делителях установлены нижние бесконтактные датчики - левый 11 и правый 12. При движении по ровному полю модуль с жаткой установлен на определенной высоте относительно поверхности поля. Наличие препятствия в зоне обзора датчиков 8 вызывает появление сигнала, который задерживается на время, зависящее от скорости движения комбайна, и расстояние, на которое датчики 8 вынесены вперед. Сигналы сравниваются с напряжением, задающим высоту расположения жатки над поверхностью поля. Разностные сигналы сравниваются с сигналами левого 11 и правого 12 ближних датчиков соответственно по левому и правому каналам. Наибольший разностный сигнал выделяется, усиливается усилителем 20 или 21 и подается через соответствующий блок 22 или 23 управления на правый или левый привод. Модуль перемещается относительно препятствия вверх (вниз) либо полностью в вертикальном направлении при равенстве управляющих сигналов в каналах, либо перемещается правая (левая) сторона модуля. При преобладании управляющего сигнала в правом (левом) канале. 2 ил.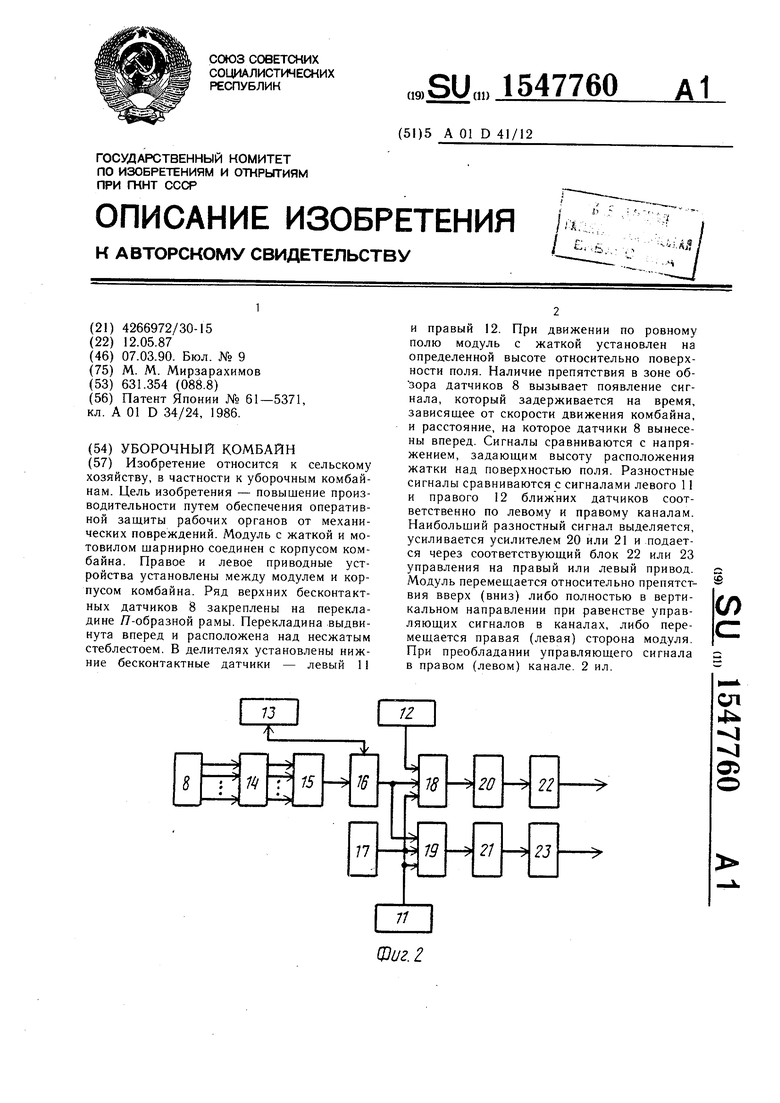
Фиг. 2
Изобретение относится к сельскому хозяйству, в частности к уборочным комбайнам.
Цель изобретения - повышение производительности путем обеспечения оперативной защиты рабочих органов от механических повреждений.
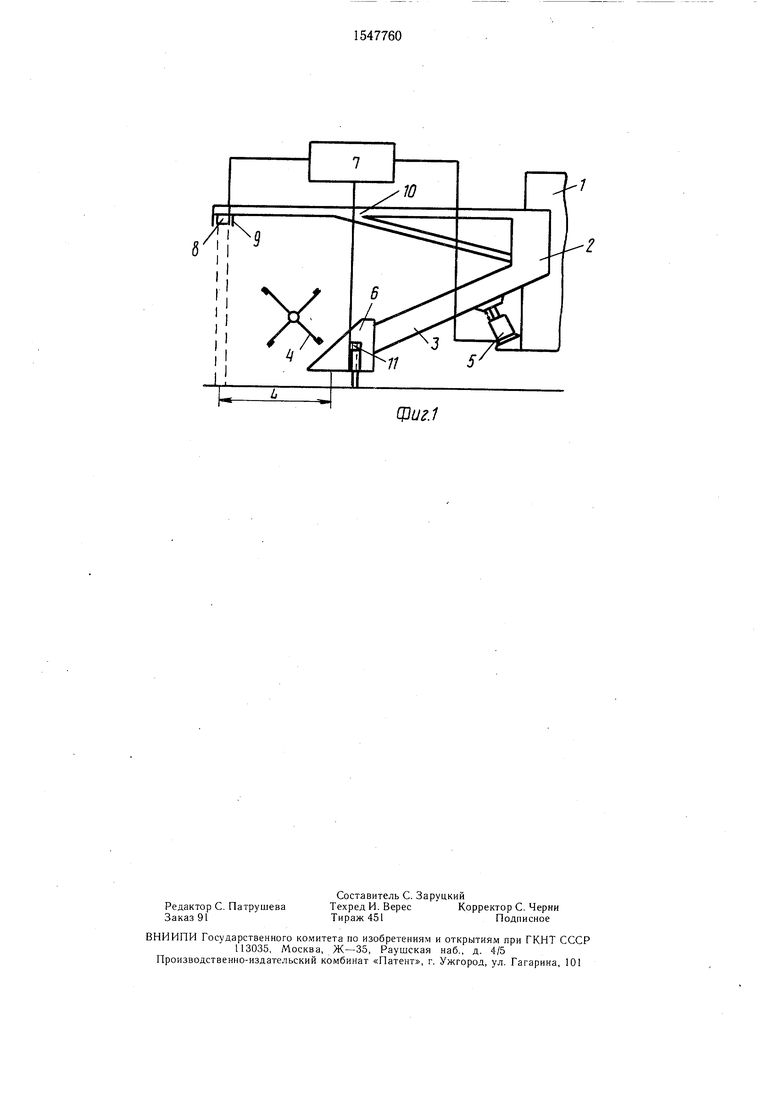
На фиг. 1 приведен уборочный комбайн, общий вид; на фиг. 2 - блок-схема управляющего устройства.
При появлении препятствий в зоне обзора верхних датчиков 8 перед мотовилом 4 работающего комбайна изменяется сигнал одного или нескольких верхних датчиков 8. Сигналы всех датчиков 8 постоянно преобразовываются в блоке 14 преобразователей в переменные электрические сигналы, сравниваются в блоке 15 предварительного сравнения, и пропускается сигнал датчика, имеющий наибольшую величиКомбайн содержит корпус 1 комбайна. 10 ну, в блок 16 задержки, где задержимодуль 2 с жаткой 3, мотовилом 4, приводные устройства 5, делители 6, управляющее устройство 7, ряд верхних датчиков 8, перекладину 9, кронштейны 10, нижний левый датчик 11, нижний правый 15 датчик 12, датчик 13 скорости.
Модуль 2 соединен с корпусом 1 комбайна шарнирно. Правое и левое приводные устройства 5 закреплены в корпус 1 комбайна справа и слева под жаткой 3.
вается в зависимости от скорости движения комбайна, задаваемого датчиком 13 скорости и расстояния между режущим инструментом жатки 3 и линией контроля верхних датчиков 8. С блока 16 задержки, задержанный сигнал датчика 8 поступает в правый 18 и левый 19 блоки сравнения, где сравнивается с опорным сигналом поступающим с блока 17 опорных сигналов, и с сигналом правого датчика 12 в правом
Съемные кронштейны 10 жестко поддержи-20 блоке 18 сравнения, с опорным сигналом
вают перекладину 9 с датчиками 8. Ряди с сигналом левого датчика 11 в левом
верхних датчиков 8 соединен с электроннымблоке 19 сравнения. Блоки 18 и 19 сравнеустройством с помощью кабелей и разъема.ния пропускают наибольшие разностные сигУправляющее устройство 7 содержитналы, усиливаются блоками 20 и 21 усилиблок 14 преобразователей, блок 15 предва- 5 телей и поступают в блоки 22 и 23 управлерительного сравнения, блок 16 задержки,ния. Правый и левый 5 приводные устройстблок 17 опорных сигналов, правый блок 18ва с помощью блоков 22 и 23 управления по
сравнения, левый блок 19 сравнения, пра-уровням наибольших разностных сигналов
вый блок 20 усилителей, левый блок 21поднимают модуль 2 на высоту, равную высоусилителей, правый блок 22 управления,те препятствия, причем препятствие уже
30 находится перед режущим инструментом жатки 3. Разностные сигналы поступают на
левый блок 23 управления.
Блок 14 преобразователей имеет контактную колодку для отключения любого верхнего датчика 8. Блок 17 опорных сигналов имеет переключатель для выбора необходимого опорного сигнала (выбора необвходы блоков 22 и 23 управления, в данном случае одинакового уровня, поэтому и правый, и левый 5 приводные устройства поднимают модуль 2 с двух сторон
ходимой высоты среза). Блоки 18 и 19 срав- 35 на одинаковую высоту, нения включают в себя схемы преобразова-Постоянное наличие разностных сигнателей для преобразования сигналов нижних датчиков 11 и 12 в переменные
лов на входах блоков 22 и 23 управления с уровнем, соответствующим высоте препятствия, позволяет модулю 2 гибко обходить сверху препятствие, сохраняя высоту относительно поверхности препятствия в заданной области. Тем самым обеспечивается защита рабочих органов от повреждений, чистота убранного урожая и относительно малые потери растительной массы.
электрические сигналы.
40
Комбайн работает следующим образом.
При относительно ровной поверхности земли и отсутствии препятствий (выступов, камней и других инородных тел) на поверхности поля в области захвата жатки 3 (фиг. 1), модуль 2 работающего комбайна 45 находится на заданной блоком 17 опорных сигналов (фиг. 2) 15 высоте среза. Блок 17 опорных сигналов вырабатывает несколько различных опорных сигналов, соответствующих различной высоте среза
лов на входах блоков 22 и 23 управления с уровнем, соответствующим высоте препятствия, позволяет модулю 2 гибко обходить сверху препятствие, сохраняя высоту относительно поверхности препятствия в заданной области. Тем самым обеспечивается защита рабочих органов от повреждений, чистота убранного урожая и относительно малые потери растительной массы.
При наличии углублений на поверхности земли и прохождения колесной пары через них корпус 1 комбайна опускается вниз относительно поверхности почвы, опускается вниз и модуль 2, уменьшая заданную высоту среза. Уменьшение высоты модуля
(например, 5, 10, 15 см), задаваемых пере- 50 проявляется в изменении сигналов нижних ключателем. Опорный сигнал проходит пра-датчиков 11 и 12, которые постоянно превый 18 и левый 19 блоки сравнения, усиливается правым 20 и левым 21 блоками усилителей и поступает в правый 22 и левый 23 блоки управления, которые управляют соответственно правым и левым 5 при- 55 водными устройствами, поддерживая высоту модуля 2 относительно корпуса 1 комбайна в фиксированном положении.
образовываются в переменные электрические сигналы в соответствующих блоках 18 и 19 сравнения, сравниваются с опорным сигналом блока 17 опорных сигналов и с сигналом верхних датчиков 8, поступающих с блока 16 задержки.
Разностные сигналы (в данном случае уровень разностных сигналов нижних датчиПри появлении препятствий в зоне обзора верхних датчиков 8 перед мотовилом 4 работающего комбайна изменяется сигнал одного или нескольких верхних датчиков 8. Сигналы всех датчиков 8 постоянно преобразовываются в блоке 14 преобразователей в переменные электрические сигналы, сравниваются в блоке 15 предварительного сравнения, и пропускается сигнал датчика, имеющий наибольшую величи ну, в блок 16 задержки, где задерживается в зависимости от скорости движения комбайна, задаваемого датчиком 13 скорости и расстояния между режущим инструментом жатки 3 и линией контроля верхних датчиков 8. С блока 16 задержки, задержанный сигнал датчика 8 поступает в правый 18 и левый 19 блоки сравнения, где сравнивается с опорным сигналом поступающим с блока 17 опорных сигналов, и с сигналом правого датчика 12 в правом
блоке 18 сравнения, с опорным сигналом
входы блоков 22 и 23 управления, в данном случае одинакового уровня, поэтому и правый, и левый 5 приводные устройства поднимают модуль 2 с двух сторон
лов на входах блоков 22 и 23 управления с уровнем, соответствующим высоте препятствия, позволяет модулю 2 гибко обходить сверху препятствие, сохраняя высоту относительно поверхности препятствия в заданной области. Тем самым обеспечивается защита рабочих органов от повреждений, чистота убранного урожая и относительно малые потери растительной массы.
При наличии углублений на поверхности земли и прохождения колесной пары через них корпус 1 комбайна опускается вниз относительно поверхности почвы, опускается вниз и модуль 2, уменьшая заданную высоту среза. Уменьшение высоты модуля
проявляется в изменении сигналов нижних датчиков 11 и 12, которые постоянно преобразовываются в переменные электрические сигналы в соответствующих блоках 18 и 19 сравнения, сравниваются с опорным сигналом блока 17 опорных сигналов и с сигналом верхних датчиков 8, поступающих с блока 16 задержки.
Разностные сигналы (в данном случае уровень разностных сигналов нижних датчиков 11 и 12 больше) пропускаются блоками 18 и 19 сравнения, усиливаются и передаются для управления приводными устройствами 5, которые поднимают модуль 2 с датчиками 8, 11 и 12 на высоту, необходимую для поддержания заданной высоты среза. Причем правый и левый 5 приводные устройства поднимают модуль 2 справа и слева на высоту, соответствующую глубине опускания соответственно правого и левого колеса колесной пары.
Изменение высоты модуля 2 не приводит к появлению разностного сигнала верхних датчиков 8 в блоке 14 предварительного сравнения, что позволяет точно определить
наличие препятствии и их высоту в зоне 15 не установлены вплотную друг к другу
обзора верхних датчиков 8 перед мотовилом при любой возможной высоте модуля 2 относительно поверхности земли.
Сигналы нижних датчиков 11 и 12 поступают в блоки 22 и 23 управления прибесконтактные датчики высоты модуля относительно поверхности поля, а делители снабжены соответственно правым и левым нижними бесконтактными датчиками, причем модуль соединен с корпусом комбайна поводами 5, минуя блок 16 задержки, чем 20 средством правого и левого силовых гидобеспечивается одновременность опускания корпуса комбайна 1 и подъема модуля 2. Тем самым обеспечивается защита рабочих органов от повреждений и чистота убранроцилиндров, кроме того, управляющее устройство снабжено блоком предварительного сравнения, блоком опорных сигналов, правым и левым блоками сравнения, усиления
ного урожая и при неровностях поверх- 2с и управления, при этом выходы бесконности земли.
При прохождении углубления на поверхности земли одним колесом колесной пары, например правым колесом, появляется изменение сигнала правого нижнего датчитактных датчиков высоты модуля соединены с соответствующими входами блока предварительного сравнения через блок преобразователей, при этом первый вход блока задержки соединен с выходом блока предвака 12, что приведет к подъему модуля толь- зо рительного сравнения, второй вход соединен
ко правым приводным устройством. Аналогично действует и левый канал при прохождении углубления левым колесом. Таким образом, режущий инструмент жатки 3 поддерживается параллельно плоскости поля ,на
с датчиком скорости, с выход связан с первыми входами правого и левого блоков сравнения, вторые входы которых подключены к выходу блока опорных сигналов, а третьи входы связаны соответственно с правым и
заданной высоте относительно поверхности 35 левым нижними бесконтактными датчиками, земли.
Формула изобретения
Уборочный комбайн, включающий закрепленный на его корпусе регулируемый по высоте модуль со стеблеподъемником, делителями и жаткой, приводное устройст40
причем выход правого блока сравнения соединен с правым силовым гидроцилиндром через соответствующие, соединенные последовательно блок усиления и блок управления, а выход левого блока сравнения - с левым силовым гидроцилиндром через соответствующие, соединенные последовательно блок усиления и блок управления.
во с силовым гидроцилиндром, бесконтактный датчик высоты модуля относительно поверхности поля, установленный на выдвинутом вперед и расположенным под несжатым стеблестоем кронштейне и снабженный преобразователем, управляющее устройство с блоком задержки, блоки усиления и управления и датчик скорости, отличающийся тем, что, с целью повышения производительности путем обеспечения опе- ративной защиты рабочих органов от механических повреждений, кронштейн выполнен в виде Я-образной рамы, ширина перекладины которой равна ширине захвата жатки, при этом на упомянутой перекладине установлены вплотную друг к другу
бесконтактные датчики высоты модуля относительно поверхности поля, а делители снабжены соответственно правым и левым нижними бесконтактными датчиками, причем модуль соединен с корпусом комбайна пороцилиндров, кроме того, управляющее устройство снабжено блоком предварительного сравнения, блоком опорных сигналов, правым и левым блоками сравнения, усиления
и управления, при этом выходы бесконтактных датчиков высоты модуля соединены с соответствующими входами блока предварительного сравнения через блок преобразователей, при этом первый вход блока задержки соединен с выходом блока предвас датчиком скорости, с выход связан с первыми входами правого и левого блоков сравнения, вторые входы которых подключены к выходу блока опорных сигналов, а третьи входы связаны соответственно с правым и
левым нижними бесконтактными датчиками,
причем выход правого блока сравнения соединен с правым силовым гидроцилиндром через соответствующие, соединенные последовательно блок усиления и блок управления, а выход левого блока сравнения - с левым силовым гидроцилиндром через соответствующие, соединенные последовательно блок усиления и блок управления.
Фиг.1
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
