Область техники
Настоящее изобретение относится к способу эксплуатации самоходной уборочной машины и к самоходной уборочной машине в соответствии с ограничительной частью независимых пунктов 1 и 8 формулы изобретения.
Уровень техники
Из патентного документа EP 2055173 A1 известен способ эксплуатации самоходной уборочной машины в соответствии с ограничительной частью пункта 1. В EP 2055173 A1 описан способ управления жатвенным аппаратом самоходного зерноуборочного комбайна, который обеспечивает возможность позиционирования мотовила и ножевого бруса в скоординированном относительном положении. Для этого отслеживают и оценивают изменения положений мотовила и ножевого бруса, чтобы автоматически производить корректирующее перемещение для поддержания имеющегося относительного позиционирования. Для этого система управления содержит несколько специфических для ножевого бруса средств ввода, с помощью которых ножевой брус может позиционироваться в горизонтальном направлении в пределах области своего перемещения. С помощью других специфических средств ввода мотовило может позиционироваться в горизонтальном и вертикальном направлении. Привод в действие средств ввода производится оператором, который регулирует положение мотовила и ножевого бруса в зависимости от вида убираемой массы и условий уборки. При укладке жатвенного аппарата на предусмотренную для этого транспортную тележку для целей транспортировки как мотовило, так и ножевой брус должны быть переведены в определенное допустимое для транспортировки положение, чтобы соблюсти допустимый для дорожного движения габарит по ширине. Для этого оператор должен путем соответствующего привода в действие средства ввода для мотовила и для ножевого бруса привести в действие систему управления, чтобы мотовило и ножевой брус были переведены в допустимое для транспортировки положение. Перевод жатвенного аппарата в транспортное положение оператором обеспечивается не всегда, например, в результате невнимательности или недосмотра, что может приводить к множеству проблем. Так например, вследствие того, что мотовило не опущено и/или не втянуто или не втянут ножевой брус, может происходить повреждение транспортной тележки или самого жатвенного аппарата. Кроме того, в гидравлическом контуре жатвенного аппарата остается гидравлическое масло, которого недостает в гидравлическом контуре зерноуборочного комбайна.
Раскрытие изобретения
Задачей настоящего изобретения является создание способа эксплуатации самоходной уборочной машины и самоходной уборочной машины, которые отличаются большим удобством управления.
В соответствии с изобретением решение поставленной задачи достигается за счет отличительных признаков способа по пункту 1 и устройства по пункту 8 формулы изобретения.
Согласно пункту 1 предложено, что посредством устройства управления, в зависимости от изменения режима эксплуатации, средству ввода назначают вторую функцию, которая отлична от первой функции и которая является специфической для рабочего аппарата в режиме эксплуатации, отличном от режима уборки. Временное назначение второй функции вместо закрепленной за средством ввода первой функции, причем обе функции являются специфическими для рабочего аппарата, имеет то преимущество, что, с одной стороны, ограничивается число средств ввода, требуемых для выполнения обеих функций управления рабочим аппаратом, и с другой стороны, предотвращается ошибочное управление из-за множественного назначения, так как назначение функций производится применительно к специфике аппарата и ориентировано на режим эксплуатации.
Предпочтительно посредством второй функции рабочий аппарат может управляться таким образом, что выполняется автоматический перевод рабочего аппарата в рабочее положение или в транспортное или стояночное положение. Простым приводом в действие средства ввода рабочий аппарат может переводиться в одно из двух положений, при этом отдельные компоненты рабочего аппарата в транспортном положении принимают соответствующие положения относительно друг друга, которые обеспечивают возможность безопасной дорожной транспортировки. Примером является монтируемый на уборочной машине сменный аппарат, который для дорожного движения укладывают на транспортную тележку. Для обеспечения того, чтобы ни один компонент сменного аппарата не выступал за допустимый транспортный габарит по ширине, после привода в действие средства ввода эти компоненты автоматически переводятся в свое соответствующее транспортное положение. Оператор уборочной машины уже не должен заботиться о том, чтобы путем целенаправленного привода в действие соответствующего средства ввода конкретный компонент был переведен в транспортное положение перед укладкой сменного аппарата на транспортную тележку. При этом устраняется также риск повреждения транспортной тележки при укладки на нее сменного аппарата. Другое преимущество при автоматическом переводе в транспортное или стояночное положение состоит в том, что при запуске перевода в транспортное положение обеспечивается стабильный поток через гидроцилиндры для параллельного движения поршней.
Предпочтительно длительность привода в действие средства ввода для перевода в одно из двух положений, в рабочее положение или транспортное положение, может определяться в зависимости от скорости движения уборочной машины. В аспекте безопасности эксплуатации требуемая длительность привода в действие средства ввода определяется в зависимости от скорости движения после назначения второй функции. Для этого в устройстве управления записана предельная величина скорости, с которой сравнивается текущая скорость движения. При превышении этой предельной величины скорости достаточно единовременного привода в действие средства ввода, чтобы запустить автоматический процесс перевода рабочего аппарата в транспортное положение или в рабочее положение. Если в отличие от этого скорость движения уборочной машины не превышает предельной величины, средство ввода должно приводиться в действие длительное время, чтобы рабочий аппарат был переведен в транспортное или в рабочее положение.
Для этого отслеживают длительность привода в действие средства ввода. За счет отслеживания длительности привода в действие обеспечивается выполнение того, что прерывание длительного привода в действие средства ввода приводит к немедленному прерыванию перевода рабочего аппарата в транспортное или в рабочее положение.
В частности, рабочий аппарат может автоматически переводиться в рабочее положение, которое записано в памяти устройства управления в качестве последнего рабочего положения рабочего аппарата. Это повышает удобство управления для оператора.
Далее, достижение рабочего положения или транспортного положения может отслеживаться с помощью датчиков. Достижение рабочего положения или транспортного положения может сигнализироваться оператору соответствующим образом. Для этого используются уже имеющиеся на жатвенном аппарате датчики, такие как датчики для управления высотным положением мотовила или датчики для отслеживания регулировки жатвенного стола по длине, сигналы которых обрабатываются устройством управления. Соответственно, могут определяться и сигнализироваться возможные ошибки функционирования.
Предпочтительно при достижении рабочего положения или транспортного положения за счет привода в действие средства ввода средству ввода может назначаться первая функция. Этим путем обеспечивается автоматическая замена второй функции, которая была назначена средству ввода, вновь на исходно записанную первую функцию. Таким образом, оператору автоматически предоставляются в распоряжение функции, которые существенны для эксплуатации рабочего аппарата.
Согласно пункту 8 формулы изобретения предложено, что посредством устройства управления, в зависимости от изменения режима эксплуатации, средству ввода может назначаться вторая функция, которая отлична от первой функции и является специфической для рабочего аппарата в режиме эксплуатации, отличном от режима уборки.
При этом вторая функция может служить для перевода рабочего аппарата в рабочее положение или в транспортное положение.
В частности, возможность выполнения второй функции может зависеть от скорости движения уборочной машины. Благодаря этому могут устраняться опасные ситуации, которые могут возникать при автоматическом приводе в действие рабочего аппарата.
Предпочтительно уборочная машина может быть выполнена в виде зерноуборочного комбайна.
В предпочтительном решении по развитию изобретения рабочий аппарат может быть жатвенным аппаратом.
Краткий перечень чертежей
Далее изобретение будет пояснено на примере осуществления со ссылками на чертежи. На чертежах изображено следующее.
На фиг. 1 схематично показана самоходная уборочная машина на виде сбоку;
на фиг. 2 показан жатвенный аппарат по фиг. 1 в увеличенном виде с вырывом;
на фиг. 3 схематично показан жатвенный аппарат с лотком переменной длины;
на фиг. 4 показан рычаг управления самоходной уборочной машины:
на фиг. 5 показана блок-схема для иллюстрации способа.
Осуществление изобретения
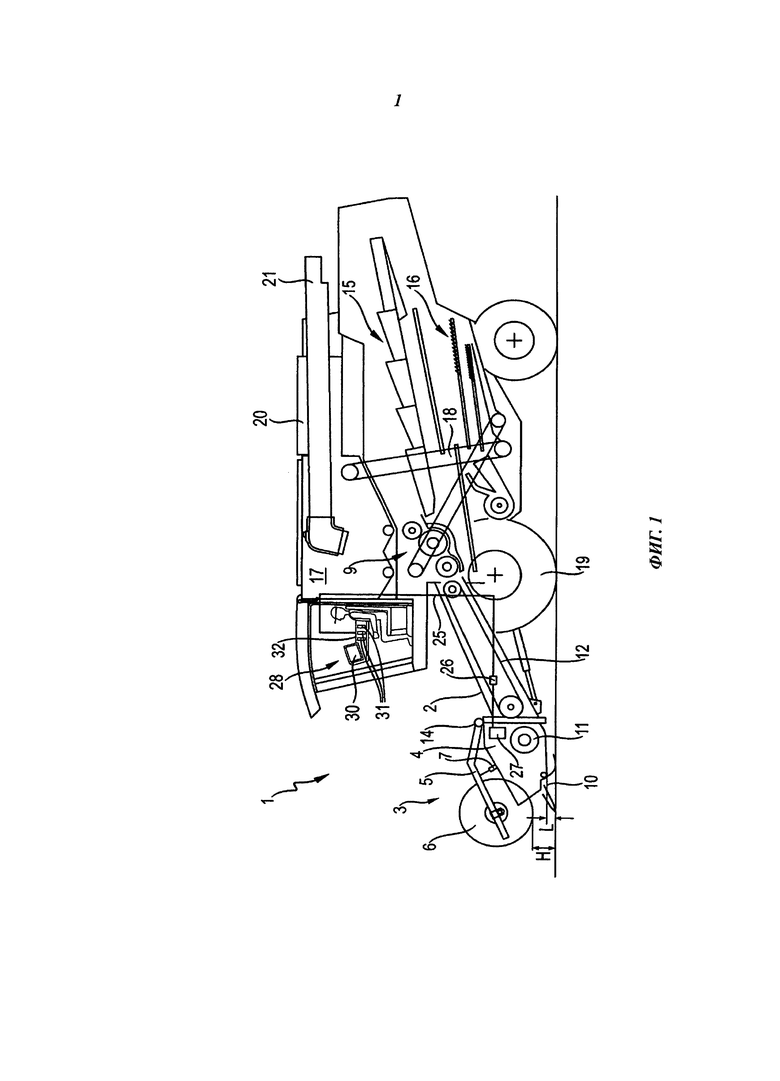
На фиг. 1 схематично показана на виде сбоку самоходная уборочная машина, выполненная в виде зерноуборочного комбайна 1 с поворотным в вертикальном направлении питателем 2, на котором расположен сменный аппарат в виде жатвенного аппарата 3. Жатвенный аппарат 3 состоит из жатвенного стола 4 мотовила 6, укрепленного на жатвенном столе 4 с помощью двух регулируемых по высоте поворотных несущих рычагов 5 мотовила. Между жатвенным столом 4 и несущими рычагами 5 мотовила шарнирно укреплены два гидроцилиндра 7, посредством которых несущие рычаги 5 мотовила поворачиваются вокруг шарнирной точки 14 и изменяют высотное положение мотовила 5. Дополнительно между несущими рычагами 5 мотовила и мотовилом 6 установлены два других гидроцилиндра 13, с помощью которых регулируется положение мотовила в горизонтальном направлении относительно жатвенного стола 4, как показано на фиг. 2.
Мотовило 6, приводимое во вращение мотором, выполненным в виде гидромотора 8, служит для непрерывного приема убираемой массы и для ее равномерной подачи через жатвенный аппарат 3 и питатель 2 к известному и поэтому здесь не описываемому молотильному устройству 9 зерноуборочного комбайна 1. Убираемая масса срезается ножевым брусом 10, установленным на передней кромке жатвенного стола 4. Затем убранная масса с помощью мотовила 6 подается к расположенному в жатвенном столе 4 приводимому во вращение приемному шнеку 11. Приемный шнек 11 направляет убранную массу к питателю 2. В питателе 2 движется наклонный конвейер 12, который подает убранную массу дальше к молотильному устройству 9. За молотильным устройством расположено сепарирующее устройство 15, здесь в виде клавишного соломотряса. Альтернативно сепарирующее устройство 15 может быть выполнено в виде сепарирующего ротора. Выдаваемая от молотильного устройства 9 и от сепарирующего устройства 15 убранная масса направляется к очистному устройству 16, в котором зерно отделяется от других фракций убранной массы. От очистного устройства 16 очищенная убранная масса поступает по так называемому зерновому элеватору 18 в зерновой бункер 17. Для опорожнения зернового бункера 17 предусмотрено устройство разгрузки зернового бункера с разгрузочной трубой 21, через которую зерно передается на грузовое транспортное средство. В дальнейшем рабочими аппаратами уборочной машины 1 будут называться устройства, которые служат для обработки или очистки принятой убранной массы.
Управление рабочими аппаратами зерноуборочного комбайна 1 осуществляется посредством устройства 28 управления, которое связано системной шиной 25 с рабочими аппаратами для управления ими или их регулирования. Устройство 28 управления содержит блок 30 отображения, устройство обработки данных и средство 31 ввода, которое может быть выполнено, например, в виде переключателя, рычага управления, клавиатуры или сенсорного экрана и расположено на консоли 32 управления. Далее, с помощью соединительных элементов 26 расположенный на жатвенном аппарате 3 блок 27 управления подсоединен к системной шине 25.
Зерноуборочный комбайн 1 оснащен двигателем 20 внутреннего сгорания, который приводит привод ходовой части для привода приводных колес 19 комбайна 1, привод молотильного устройства для привода молотильного устройства 9 и привод жатвенного аппарата для привода жатвенного аппарата 3. Другие рабочие аппараты комбайна 1, такие как сепарирующее устройство 15 и очистное устройство 16, также приводятся через приводы от двигателя внутреннего сгорания. Привод ходовой части приводится независимо от привода молотильного устройства, привода жатвенного аппарата или приводов других рабочих аппаратов для того, чтобы при переходе от работы на уборке к транспортному движению можно было отключать не требующиеся приводы. Отключение рабочих аппаратов производится оператором путем соответствующего ввода через одно из средств 31 ввода.
Для оптимального приема убираемой массы жатвенный аппарат 3 выполнен подвижным путем того, что он направляется как по высоте, так и по поперечному наклону. Вертикальная высотная регулировка, то есть выравнивание продольного наклона в направлении движения и изменение поперечного наклона жатвенного аппарата 3 производятся в зависимости от действительного уровня почвы и, следовательно, служат для получения равномерной высоты стерни убранной массы.
На фиг. 2 показан жатвенный аппарат 3 зерноуборочного комбайна 1 по фиг. 1 на виде с вырывом, в том числе показаны расположенные на нем датчики 22, 23 и снабженный памятью 26 данных и микропроцессором блок 27 управления, служащий для управления жатвенным аппаратом 3. Мгновенная высота H мотовила 6 измеряется установленным в шарнирной точке 14 датчиком 22 угла поворота, который измеряет угол α несущих рычагов 5 мотовила. Генерируемый датчиком 22 угла поворота сигнал HHS прямо пропорционален высоте H мотовила.
Гидромотор 8 приводится гидравлической приводной системой 24. В гидравлической приводной системе 24 встроен датчик 23 давления, который воспринимает гидравлическое давление, изменяющееся в зависимости от крутящего момента M мотовила. Генерируемый датчиком 23 давления сигнал HDS пропорционален нагрузке, действующей на мотовило 6. Нагрузка на мотовиле 6 определяется путем определения действующего на мотовило 6 тягового усилия FH, которое определяется крутящим моментом M на мотовиле. Сигналы HHS и HDS подаются на связанный с датчиком 22 угла поворота и датчиком 23 давления блок 27 управления, который управляет гидравлической приводной системой 24.
Далее, может быть предусмотрено, что жатвенный аппарат содержит лоток жатвенного аппарата, который состоит из неподвижной части и подвижной части для обеспечения возможности изменения длины жатвенного стола при обработке различных видов убираемой массы. При изменении положения подвижной части лотка жатвенного аппарата по отношению к неподвижной части должна обеспечиваться невозможность столкновения мотовила с ножевым брусом при их любом возможном относительном положении. Для этого непрерывно определяется относительное положение подвижной части лотка относительно его неподвижной части и с целью сохранения минимального расстояния мотовила от ножевого бруса в соответствии с относительным положением регулируется минимальное высотное положение мотовила посредством воздействия электромагнитных клапанов. При этом простым образом с боковой стенкой подвижной части лотка соединена криволинейная направляющая, с которой взаимодействует укрепленный на мотовиле датчик, причем этот датчик воздействует на электромагнитные клапаны узла поршневых цилиндров, которые предусмотрены для подъема и опускания мотовила. Управление подвижной частью лотка и мотовилом осуществляется блоком управления на жатвенном аппарате.
На фиг. 3 показан жатвенный аппарат 3 с лотком 60 жатвенного аппарата указанного типа, который состоит из неподвижной части 61 и подвижной части 62. Неподвижная часть 61 состоит из задней основной рамы 63, несущей трубы 64 и усиливающего профиля 65. Донный лист 66 жестко соединен с основной рамой 63 над несущей трубой 64. Боковые стенки 67 соединены с днищем и с основной рамой. Под донным листом 66 предусмотрены несколько установленных на расстоянии друг от друга узлов 68 поршневых цилиндров, поршневые штоки 69 которых находятся в зацеплении с поперечным несущим элементом 70, который несет ножевой брус 71. С поперечным несущим элементом 70 соединен другой донный лист 72, который в показанном на фиг.3 положении перекрывает донный лист 66. С донным листом 72 и несущим элементом 70 соединены боковые стенки 73, так что из донного листа 72 и боковых стенок 73 с несущим элементом 70 и ножевым брусом 71 образована подвижная часть 62 лотка 60 жатвенного аппарата. Посредством привода в действие узлов 68 поршневых цилиндров может изменяться положение подвижной части 62 лотка 60 жатвенного аппарата относительно его неподвижной части 61.
К усиливающему профилю 65 неподвижной части 61 лотка 60 жатвенного аппарата привинчены кронштейны 74, в которых установлены в опорах два расположенных параллельно друг другу несущих рычага 75. Эти несущие рычаги 75 могут подниматься и опускаться узлами 76 поршневых цилиндров. На несущих рычагах 75 установлены ползуны 77, на которых установлено с возможностью привода мотовило 6. Посредством привода в действие узлов 79 поршневых цилиндров ползуны 77 могут возвратно-поступательно перемещаться на несущих рычагах 75. Как видно на фиг. 3, по меньшей мере, с одним ползуном жестко соединен коленчатый рычаг 80, который на дальнем от ползуна 77 конце несет микропереключатель 81. Для микропереключателя 81 предназначена направляющая 82 управления, установленная на одной из боковых стенок 73 подвижной части 62 лотка 60 жатвенного аппарата. При приводе в действие узлов 68 поршневых цилиндров ножевой брус выдвигается из показанного на фиг.3 положения влево. При этом микропереключатель 81 или принадлежащий ему не показанный ходовой ролик перемещается по криволинейной направляющей 82 и тем самым приводит в действие микропереключатель 81. Этот привод в действие вызывает привод в действие узлов 76 поршневых цилиндров в направлении «подъем» до тех пор, пока микропереключатель не выйдет из контакта с криволинейной направляющей 82. Разумеется, оператор может еще больше поднять мотовило 6 путем дальнейшего привода в действие узлов 76 поршневых цилиндров. Для мотовила 6 предназначен электромагнитный клапан 83 с возможностями переключения на подъем и опускание. Обе эти возможности переключения могут управляться оператором. Вместо описанного механического решения для отслеживания положения мотовила может быть предусмотрено электронное решение, при котором функции ползунов 77, коленчатого рычага 80 и микропереключателя 81 заменены электронной характеристикой для управления мотовилом 6, записанной в устройстве 28 управления.
Далее, по меньшей мере, для одного узла 68 поршневого цилиндра предназначен датчик 84 хода, который устанавливает меру выдвижения ножевого бруса 71 из его полностью втянутого положения и выдает соответствующий сигнал. Далее, по меньшей мере, для одного из несущих рычагов 75 мотовила 6 предназначен датчик 85 угла поворота, который, исходя из определенной опорной точки, определяет текущее угловое положение несущего рычага 75 относительно опорной точки и выдает соответствующий сигнал. Другой датчик 86 угла поворота установлен, по меньшей мере, на одном из несущих рычагов 75 и воспринимает текущее угловое положение рычага 87. Этот рычаг 87 установлен на шарнирной оси 88 на несущем рычаге 75 с возможностью поворота. На своих обоих концах рычаг 87 несет направляющие ролики 89 и 90, по которым направляется приводная цепь 91 для мотовила 6. В зависимости от положения ползунов 77 мотовила на несущих рычагах 75 рычаг 87 поворачивается и воздействует на датчик 86 угла поворота. Определяемое датчиком 86 угла поворота положение рычага 87 также предоставляется в виде соответствующего сигнала для дальнейшей обработки. Управление высотным положением мотовила, которое было описано применительно к жатвенному аппарату 3 по фиг. 2, относится также к жатвенному аппарату по фиг. 3.
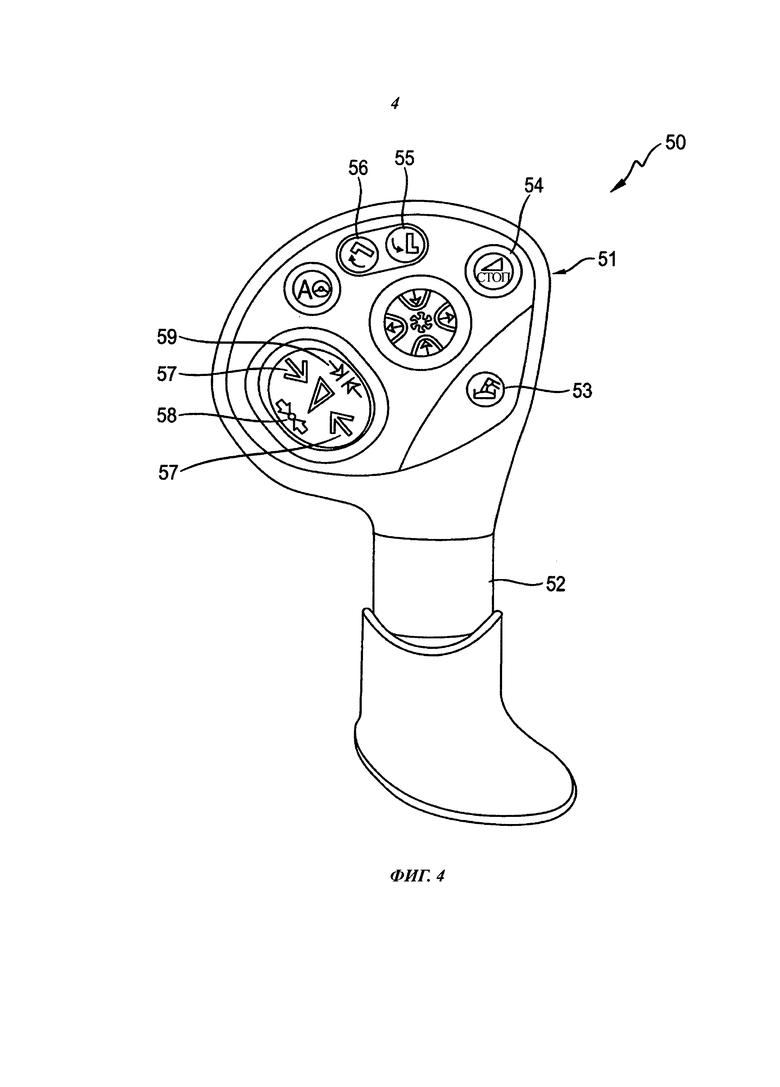
Как уже было указано, средства 31 ввода могут быть выполнены помимо прочего в виде переключателя или рычага управления со специфическими функциями управления рабочими аппаратами. На фиг. 4 показана в перспективе головка 51 выполненного в виде многофункциональной рукоятки 50 средства 31 ввода, который служит для управления зерноуборочным комбайном 1. На нижней стороне головки 51 сформирована полая стойка 52, предусмотренная для охвата не показанного на фиг. 4 стержня многофункциональной рукоятки 50, которая соединяет головку 51 с шарниром в панели приборов. На многофункциональной рукоятке 50 расположено множество переключателей 53, 54, 55, 56, 57, 58, 59, которые служат для управления, по меньшей мере, двумя рабочими аппаратами комбайна 1, - здесь жатвенным аппаратом 3 и разгрузочной трубой 21 зернового бункера. Так, переключатель 58 устройства 28 управления является средством 31 ввода, предназначенным для выполнения первой функции F1, специфической для рабочего аппарата «жатвенный аппарат 3», а именно для регулирования высоты срезания жатвенного аппарата 3. Переключатель 59 имеет в качестве специфической функции F1 предварительный выбор высоты срезания. Жатвенный аппарат 3 может отключаться посредством привода в действие переключателя 54. Далее, на головке 51 расположен не показанный сдвижной переключатель, который служит для втягивания и выдвижения подвижной части 62 лотка 60 жатвенного аппарата.
Далее, на многофункциональной рукоятке 50 расположены переключатели 53, 55 и 56. Посредством переключателя 53 может активизироваться опорожнение зернового бункера, а с помощью переключателей 55 и 56 может производиться поворот разгрузочной трубы 21 зернового бункера в сложенное и выдвинутое положение.
Расположение множества переключателей или рычагов в качестве средств 31 ввода на консоли 32 управления самоходной уборочной машины делает невозможным их полный обзор оператором и затрудняет управление уборочной машиной. Поэтому предложено для одного или нескольких средств 31 ввода, за каждым из которых закреплена первая специфическая функция F1 для управления рабочим аппаратом, закрепить за ним для соответствующего рабочего аппарата вторую специфическую функцию F2, которая, однако предоставляется в распоряжение только тогда, когда уборочная машина не находится в режиме эксплуатации на уборке, то есть когда на основании введенной оператором ситуации уборочная машина не готова к приему и обработке убранной массы.
В данном описываемом примере осуществления предусмотрено, что предназначенному для управления высотой срезания переключателю 58 может быть назначена вторая функция F2, которая охватывает перевод жатвенного аппарата 3 в транспортное положение Т или стояночное положение. В транспортном положении Т изменяемый по длине лоток 60 жатвенного аппарата и мотовило 6 полностью втянуты, так что жатвенный аппарат 3 в транспортном положении T имеет как можно меньший габарит по ширине. Для обеспечения того, что переключение между первой функцией F1 и второй функцией F2 переключателя 58 производится исключительно в предусмотренной для этого ситуации, предусмотрено, что назначение первой функции F1 и второй функции F2 осуществляется устройством 28 управления только в зависимости от изменения режима эксплуатации. В отличие от этого первая функция F1 переключателя 59, то есть предварительный выбор высоты срезания, может заменяться второй функцией F2, которая предусматривает перевод в последнее записанное в памяти рабочее положение жатвенного аппарата 3.
Под изменением режима эксплуатации имеется в виду ручное выключение оператором приводов рабочих аппаратов. В случае жатвенного аппарата 3 они могут целенаправленно выключаться путем привода в действие переключателя 54 на многофункциональной рукоятке 50. За счет этого обеспечивается автоматическое назначение второй функции F2 вместо возложенной на средство 31 ввода первой функции F1 только тогда, когда явно введено изменение режима эксплуатации. Это должно предотвращать случаи, когда при аварийном выключении рабочего аппарата, например при захвате жатвенным аппаратом 3 постороннего тела, выявление которого приводит к срочной остановке, назначение производится автоматически.
Далее на примере жатвенного аппарата 3 и предназначенного для него средства 31 ввода будет пояснен процесс функционирования при управлении выравниванием поперечного наклона и высотного наклона жатвенного аппарата 3 при переменном контуре поверхности почвы. В ходе уборки в зависимости от подлежащей обработке убранной массы и имеющихся условий работы мотовило 6 и ножевой брус 10 занимают специфические рабочие положения A, в которых обеспечивается невозможность столкновения прутьев мотовила 6 с ножевым брусом 10. Как было указано выше, ножевой брус 10 может перемещаться вместе с подвижной частью лотка жатвенного аппарата для установки в положение в соответствии с видом убираемой массы. Из-за большой рабочей ширины жатвенных аппаратов обычно их укладывают на транспортную тележку, чтобы комплекс из комбайна 1 и жатвенного аппарата 3 мог передвигаться по дороге. Для обеспечения надежной укладки жатвенного аппарата 3 на транспортную тележку необходимо, чтобы мотовило 6 было переведено в полностью опущенное положение, а при выполнении жатвенного аппарата переменным по длине, как это показано на фиг. 3, подвижная часть 62 лотка 60 жатвенного аппарата должна быть переведена во втянутое положение. Для целей транспортировки жатвенный стол 4 и, по меньшей мере, одно мотовило 6 должны занимать по отношению друг к другу определенное транспортное положение Т или стояночное положение во избежание повреждения жатвенного аппарата 3 и транспортной тележки. Кроме того, в транспортном положении должно обеспечиваться, чтобы жатвенным аппаратом 3 не превышалась допустимая транспортная ширина, например, при не полностью задвинутом мотовиле 6. В том случае, если мотовило 6 и жатвенный стол 4 не заняли транспортное положение относительно друг друга, может возникнуть другая проблема в недостатке гидравлического масла в гидравлическом контуре комбайна 1 после отсоединения от него жатвенного аппарата 3.
Перевод в транспортное положение Т производится путем привода в действие различных средств 31 ввода, из которых одно управляет изменением длины жатвенного стола, а другое - положением мотовила 6. При этом оператор комбайна 1 должен внимательно следить за тем, чтобы приводить в действие средства 31 ввода до тех пор, пока мотовило 6 и жатвенный стол 4 не займут свое транспортное положение T.
Во избежание указанных выше проблем и для повышения удобства управления в зависимости от детектируемого режима эксплуатации жатвенного аппарата 3 и комбайна 1 при приводе в действие средства 31 ввода устройства 28 управления жатвенный аппарат 3 автоматически переводится в транспортное положение T. Когда оператор выключил приводы рабочих аппаратов внутри комбайна 1, так как процесс уборки закончен и жатвенный аппарат должен быть отсоединен от комбайна 1, осуществляется автоматическое назначение на средстве 31 ввода второй функции F2, отличающейся от первой функции F1 и специфической для жатвенного аппарата 3 в режиме эксплуатации, отличном от рабочего режима. Так, согласно описываемому примеру осуществления переключателю 58, за которым в режиме уборки закреплена первая функция F1 регулировки высоты срезания жатвенного аппарата 3, назначается вторая функция F2 по управлению жатвенным аппаратом 3 для автоматического перевода в транспортное положение Т.
Кроме того, по соображениям безопасности учитывается текущая скорость движения комбайна 1. Для этого в устройстве 28 управления записана предельная величина скорости движения, превышение которой или опускание ниже которой непосредственно воздействует на режим привода в действие средства 31 ввода, чтобы исключить опасность для третьих лиц при переводе в транспортное положение Т. Если установлено превышение предельной величины, то кратковременный привод в действие средства 31 ввода переводит жатвенный аппарат 3 в транспортное положение T. Если текущая скорость движения соответствует предельной величине скорости или находится ниже нее, то в целях безопасности требуется, чтобы оператор длительно приводил в действие средство 31 ввода, пока жатвенный аппарат 3 не достигнет транспортного положения T. Прерывание длительного привода в действие средства 31 вводы приводит в этой ситуации к немедленному прекращению процесса перевода в транспортное положение T.
Далее, аналогичным образом осуществляется процесс перевода жатвенного аппарата 3 в рабочее положение A. После установки и подсоединения жатвенного аппарата 3 к комбайну 1, то есть подсоединения жатвенного аппарата 3 к системной шине 25 и к гидравлическому контуру комбайна 1, проверяется режим эксплуатации комбайна 1. Если рабочие аппараты выключены, то на средстве 31 вводе назначается вторая функция F2, которая заключается в управлении жатвенным аппаратом 3 для его автоматического перевода в рабочее положение A. Рабочее положение A определяется как последнее воспринятое позиционирование мотовила 6 и жатвенного стола в ходе предыдущей эксплуатации на уборке. Этот процесс также выполняется с учетом текущей скорости движения комбайна 1.
С учетом все большего увеличения ширины жатвенных аппаратов устройство опорожнения зернового бункера также должно адаптироваться по длине, чтобы обеспечивать соответствующее расстояние перегрузки между комбайном 1 и грузовой тележкой. Соответственно, устройство опорожнения зернового бункера может содержать разгрузочную трубу из нескольких участков с их телескопическим выдвижением или с соединением с помощью одного или нескольких шарниров, вокруг которых могут поворачиваться отдельные участки разгрузочной трубы, благодаря чему может достигаться общая длина разгрузочной трубы зернового бункера комбайна 1, допустимая для дорожного движения. Для этого, по меньшей мере, один участок разгрузочной трубы выполнен с возможностью откидывания на угол 90° или больше, причем предпочтительно этот участок при опорожнении бункера наиболее удален от комбайна. В этом случае этот участок разгрузочной трубы прилегает к комбайну в транспортном положении, в котором он проходит, например, поперечно продольной оси комбайна, в то время как остальные участки разгрузочной трубы проходят параллельно продольной оси.
В соответствии с описанным другой пример управления рабочим аппаратом является примером управления разгрузочной трубой 21 зернового бункера, которая посредством привода в действие двух переключателей 55, 56 на многофункциональной рукоятке 50 может переводиться из транспортного положения T, в котором разгрузочная труба 21 полностью прилегает к комбайну 1, как это показано на фиг. 1, в рабочее положение A, в котором она проходит параллельно продольной оси комбайна, или в положение 0 опорожнения зернового бункера, в котором она проходит по существу перпендикулярно продольной оси комбайна 1. Третий переключатель 53 служит для включения и выключения находящегося в разгрузочной трубе 21 транспортирующего устройства для разгрузки убранной массы, содержащейся в зерновом бункере. Для повышения удобства управления за третьим переключателем 53, за которым в качестве первой функции F1 закреплено включение и выключение транспортирующего устройства, может быть закреплена вторая функция F2, которая является специфической для разгрузочной трубы 21. Вторая функция F2 относится к автоматическому переводу разгрузочной трубы 21 в ее транспортное положение T. В простейшем случае транспортное положение T разгрузочной трубы 21 ограничивается тем, что она проходит параллельно продольной оси комбайна 1. Как было описано выше, назначение второй функции F2 выполняется только при том условии, что детектируется режим эксплуатации, отличный от режима уборки. Соответственно, вторая функция F2, которая обеспечивает автоматический перевод разгрузочной трубы 21 зернового бункера в транспортное положение T, назначается третьему переключателю 53 только тогда, когда оператором отключается привод транспортирующего устройства разгрузочной трубы 21.
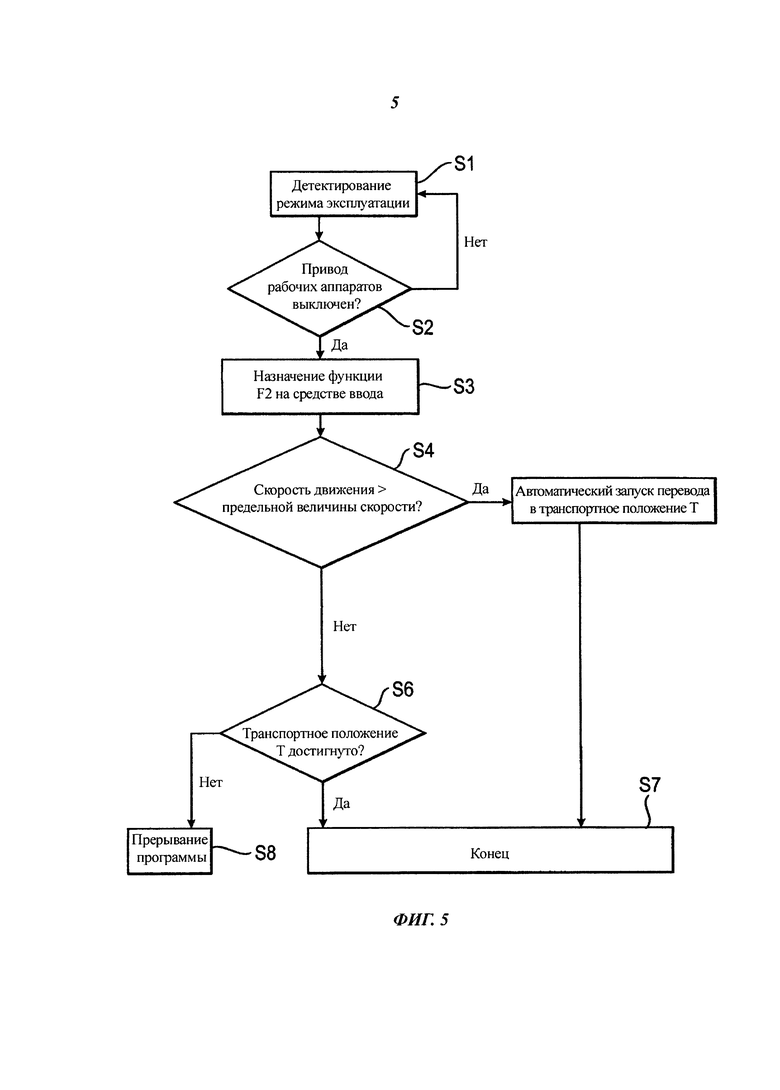
Способ эксплуатации уборочной машины, в частности зерноуборочного комбайна 1, будет пояснен на основе блок-схемы, представленной на фиг. 5. Вначале на шаге S1 детектируется текущий режим эксплуатации уборочной машины. На шаге S2 проверяется, соответствует ли текущий режим эксплуатации уборочной машины режиму включения или выключения рабочих аппаратов. Если рабочие аппараты находятся во включенном режиме, продолжается детектирование в соответствии с шагом S1. Если в отличие от этого установлено, что рабочие аппараты выключены, на шаге S3 средству 31 ввода, то есть в случае жатвенного аппарата 3 переключателю 58 или в случае разгрузочной трубы 21 зернового бункера переключателю 53, назначается вторая функция F2, которая заменяет первую функцию F1, закрепленную за этим средством 31 ввода в режиме уборки.
По соображениям безопасности эксплуатации на шаге S4 текущая скорость движения сравнивается с предельной величиной скорости. Если предельная величина скорости превышена, то кратковременный привод в действие средства 31 ввода, которому назначена вторая функция, на шаге S5, приводит к автоматическому запуску перевода рабочего аппарата в транспортное положение Т.
Скорость ниже предельной величины имеет следствием ограничение второй функции F2 тем, что для перевода рабочего аппарата в транспортное положение T требуется привод в действие средства 31 ввода на всю продолжительность перевода в транспортное положение. Длительный привод в действие средства 31 ввода верифицируется на шаге S6 путем отслеживания достижения транспортного положения T. При достижении транспортного положения Т процесс заканчивается.
Если в противоположность этому в ходе перевода рабочего аппарата в транспортное положение T привод в действие средства ввода прерывается, это приводит к немедленному прерыванию управления и остановке рабочего аппарата на шаге S8.
Дополнительно может быть предусмотрено, что при достижении транспортного положения T на шаге S6 или при прерывании в соответствии с шагом S8 назначение второй функции F2 отзывается, так что средство ввода вновь принимает свою первоначальную функцию F1.
подъема/опускания жатвенного аппарата
| название | год | авторы | номер документа |
|---|---|---|---|
| ЖАТВЕННЫЙ АППАРАТ САМОХОДНОЙ УБОРОЧНОЙ МАШИНЫ | 2011 |
|
RU2562726C2 |
| САМОХОДНАЯ СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2015 |
|
RU2674597C2 |
| САМОХОДНАЯ УБОРОЧНАЯ МАШИНА | 2009 |
|
RU2511231C2 |
| САМОХОДНАЯ УБОРОЧНАЯ МАШИНА | 1988 |
|
RU2040881C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2016 |
|
RU2727648C2 |
| УБОРОЧНЫЙ КОМПЛЕКС | 2012 |
|
RU2569566C2 |
| РЕЖУЩИЙ АППАРАТ ДЛЯ САМОХОДНОЙ УБОРОЧНОЙ МАШИНЫ | 2013 |
|
RU2626946C2 |
| ЖАТКА УНИВЕРСАЛЬНАЯ УБОРОЧНОЙ МАШИНЫ | 2012 |
|
RU2528441C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА С ВЫГРУЗКОЙ УСКОРЕННЫМ ПОЛОТЕННЫМ ТРАНСПОРТЕРОМ | 2010 |
|
RU2512307C2 |
| СЕЛЬХОЗМАШИНА С ФУНКЦИЕЙ ЭКСТРЕННОЙ ОСТАНОВКИ | 2009 |
|
RU2492619C2 |


Группа изобретений относится к сельскому хозяйству. Самоходная уборочная машина содержит множество рабочих аппаратов для обработки убранной массы, которые управляются предназначенным для уборочной машины устройством управления. По меньшей мере один рабочий аппарат управляется с помощью средства ввода с реализацией первой специфической функции в режиме уборки. Средство ввода связано с устройством управления. В зависимости от изменения режима эксплуатации посредством устройства управления назначают средству ввода вторую функцию, которая отлична от первой функции. Вторая функция является специфической для рабочего аппарата в режиме эксплуатации, отличном от режима уборки. Группа изобретений повышает удобство управления самоходной уборочной машиной. 2 н. и 10 з.п. ф-лы, 5 ил.
1. Способ эксплуатации самоходной уборочной машины (1), содержащей множество рабочих аппаратов (3, 9, 15, 16) для обработки принятой убранной массы, которыми управляют посредством устройства (28) управления, предназначенного для уборочной машины (1), причем, по меньшей мере, одним рабочим аппаратом (3) управляют с помощью средства (31) ввода, связанного с устройством (28) управления, с реализацией первой специфической функции (F1) в режиме уборки,
отличающийся тем, что
посредством устройства (28) управления, в зависимости от изменения режима эксплуатации, средству (31) ввода назначают вторую функцию (F2), которая отлична от первой функции (F1) и является специфической для рабочего аппарата (3) в режиме эксплуатации, отличном от режима уборки.
2. Способ по п. 1, отличающийся тем, что посредством второй функции (F2) рабочим аппаратом (3, 21) управляют таким образом, что выполняют автоматический перевод рабочего аппарата (3, 21) в рабочее положение (А) или в транспортное положение (T).
3. Способ по п. 2, отличающийся тем, что длительность привода в действие средства (31) ввода для перевода в одно из двух положений (A, T) определяют в зависимости от скорости движения уборочной машины (1).
4. Способ по п. 3, отличающийся тем, что отслеживают длительность привода в действие средства (31) ввода.
5. Способ по любому из пп. 2-4, отличающийся тем, что рабочий аппарат (3, 21) автоматически переводят в рабочее положение (A), которое записано в памяти устройства (28) управления в качестве последнего рабочего положения рабочего аппарата (3, 21).
6. Способ по любому из пп. 2-4, отличающийся тем, что достижение рабочего положения (А) или транспортного положения (T) отслеживают с помощью датчиков.
7. Способ по любому из пп. 2-4, отличающийся тем, что при достижении рабочего положения (А) или транспортного положения (Т) за счет привода в действие средства (31) ввода средству (31) ввода назначают первую функцию (F1).
8. Самоходная уборочная машина (1), содержащая множество рабочих аппаратов (3, 9, 15, 16, 21) для обработки принятой убранной массы, которые выполнены управляемыми посредством устройства (28) управления, предназначенного для уборочной машины (1), причем, по меньшей мере, один рабочий аппарат (3) выполнен управляемым с помощью средства (31) ввода, связанного с устройством (28) управления, с реализацией первой специфической функции (F1) в режиме уборки, отличающаяся тем, что устройство (28) управления выполнено с возможностью назначения, в зависимости от изменения режима эксплуатации, средству (31) ввода второй функции (F2), которая отлична от первой функции (F1) и является специфической для рабочего аппарата (3) в режиме эксплуатации, отличном от режима уборки.
9. Самоходная уборочная машина (1) по п. 8, отличающаяся тем, что вторая функция (F2) служит для перевода рабочего аппарата в рабочее положение (A) или в транспортное положение (T).
10. Самоходная уборочная машина (1) по п. 8 или 9, отличающаяся тем, что возможность выполнения второй функции (F2) зависит от скорости движения уборочной машины (1).
11. Самоходная уборочная машина (1) по п. 8 или 9, отличающаяся тем, что уборочная машина выполнена в виде зерноуборочного комбайна (1).
12. Самоходная уборочная машина (1) по п. 11, отличающаяся тем, что рабочим аппаратом является жатвенный аппарат (3).
| US 5752372 A1, 19.05.1988 | |||
| EP 2055173 A1, 06.05.2009 | |||
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ УБОРОЧНОЙ СЕЛЬХОЗМАШИНОЙ | 2006 |
|
RU2402191C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ МАШИНА | 2005 |
|
RU2389171C2 |
| РАБОЧАЯ СЕЛЬХОЗМАШИНА | 2007 |
|
RU2436278C2 |

