Изобретение относится к судовым гребным электрическим установкам, обеспечивающим экономичные режимы движения. Установка может быть применена на любых типах кораблей, судов и подводных аппаратов.
Известны системы электродвижения судов (патенты EP №2236409 от 02.04.2009, US №8816524 от 13.02.2009), оснащенных одним или несколькими гребными винтами, каждый из которых приводится во вращение мощным синхронным или вентильным электродвигателем, ток заданной частоты и направления для которого вырабатывается дизель-генераторной или турбогенераторной установкой, и через управляемую трансформирующую систему подается к электродвигателю.
Недостатки такой системы электродвижения - большие габариты и массы электродвигателя-генератора и трансформирующей системы, отсутствие возможности резервирования электродвигателей, а также пониженная энергетическая эффективность для движения судна в режимах среднего, малого и самого малого хода.
Известен электрический привод винтового движителя подводной лодки (патент EP №1584131 от 15.01.2003).
Недостаток этого электропривода - значительная масса электродвигателя, отсутствие резервирования и высокая трудоемкость его ремонта или замены в случае выхода из строя.
Известна кормовая оконечность подводной лодки (патент RU №2166456 от 10.01.2000), у которой гребной винт подвижно насажен на прочном корпусе на опорном подшипнике в зоне кормового отсека. Упор винта передается на прочный корпус через снабженные антифрикционным покрытием кольцевые поверхности на ступице винта и прочном корпусе; привод гребного винта осуществляется через коническую зубчатую передачу, включающую зубчатое колесо большого диаметра, закрепленное на гребном винте, и конические зубчатые шестерни на выходных валах механических электроприводов, проходящих через дейдвудные подшипники, установленные внутри прочного корпуса так, что их оси перпендикулярны оси гребного винта.
Недостаток многодвигательного электромеханического привода гребного винта большого диаметра, приводимого через коническую зубчатую передачу, заключается в том, что зубья конической передачи подвергаются значительным нагрузкам, работая в условиях смазки водой. Так как данный электромеханический привод является безмуфтовым, то при нем невозможно применение современных бесколлекторных электродвигателей вследствие возбуждения значительных токов в обмотках при свободном движении подводной лодки с вращающимся винтом.
Кроме того, прочный корпус ослаблен множеством отверстий, диаметр которых зависит от наружного диаметра дейдвудной втулки, так и от диаметра конической зубчатой шестерни.
Известен электрический привод гребного винта (заявка US №2013/0233230 от 09.09.2011), включающий два электрических двигателя, расположенных последовательно, соединенных муфтами с гребным винтом между собой.
Недостаток этого электропривода - значительная масса электродвигателя и высокая трудоемкость его ремонта или замены в случае выхода из строя, а также необходимость иметь на борту подъемный кран, необходимый для выемки или замены одного из электродвигателей при выходе его из строя.
Известна система электродвижения судна (патент US №4661714 от 17.06.1985), включающая два электродвигателя, приводящих через две зубчатые шестерни зубчатое колесо редуктора, соединенного с валом гребного винта.
Известен многодвигательный привод транспортного средства (патент US №4685354 от 03.10.1986), включающий размещенную в корпусе цилиндрическую зубчатую передачу с соединенным с выходным валом колесом, взаимодействующим с множеством шестерен, расположенных на выходных валах электродвигателей, закрепленных на корпусе.
Известен многодвигательный электромеханический привод движителя транспортного средства (преимущественно судна) (патент US №7802494 от 13.11.2006).
Недостатки данного электромеханического привода в том, что на солнечную шестерню действуют максимальные нагрузки значительно большие, чем на взаимодействующие с ней приводные шестерни, что существенно снижает ее надежность.
Известно эксцентриково-циклоидальное внутреннее или внешнее зацепление составных зубчатых профилей (патент RU №2385435 от 22.12.2008), состоящее из нескольких смещенных по фазе относительно друг друга дисков, каждый с циклоидальным венцом, взаимодействующим с эксцентриковым валом с числом эксцентриков, равным числу колес. Каждый эксцентрик является цилиндрическим и имеет подшипник, посаженный на эксцентрично смещенный участок общего вала. Вал может приводиться во вращение от любого двигателя, в том числе от электродвигателя.
Недостаток привода электродвигателя с редуктором, имеющим описанное зацепление - сложность конструкции эксцентриково-циклоидального зацепления с множеством эксцентриков и зубчатых дисков и пониженная надежность, обусловленная отсутствием резервирования при наличии одного электропривода вала с несколькими эксцентриками.
Известна судовая движительная установка (патент GB №789279 от 10.05.1956 г.), включающая несколько двигателей, работающих на общий винт через зубчатый редуктор, управляемые муфты сцепления и эксцентриково-циклоидальную зубчатую передачу (одно- или двухступенчатую с одним или двумя тормозными устройствами для ступенчатого изменения передаточного отношения в зависимости от включаемого тормозного устройства).
Недостаток данной установки - сложность конструкции вследствие передачи крутящего момента от двигателя к валопроводу через цилиндрический зубчатый редуктор, три управляемых муфты и эксцентриково-циклоидальную передачу.
Известен зубчатый редуктор, в котором одно зубчатое колесо (заявка CN №201293087 от 13.10.2008) или два зубчатых колеса (http://archive.hnsa.org/doc/destroer/steam/sec07.htm) приводится во вращательное движение от четырех валов с шестернями.
Известно составное зубчатое колесо (патент RU №2067704 от 08.01.1991) или составное зубчатое колесо циклоидального редуктора (патент US №5145468 от 07.01.1991 г.), состоящее из закрепленных на валу двух зубчатых дисков, зубья одного из которых смещены относительно зубьев другого.
Известна конструкция зубчатого колеса (патент RU №2375618 от 05.08.2008), выполненная в виде диска, по наружному диаметру которого установлен зубчатый венец, состоящий из набора отдельных секторных частей, на каждой из которых выполнен один или несколько зубьев. Зубчатый венец закреплен на диске крепежными деталями через прижимное кольцо.
Известна судовая электроэнергетическая установка (патент RU №2503580 от 08.06.2012), содержащая главный двигатель, соединенный с главным генератором и через электрическую систему - с гребным электродвигателем, соединяемым с гребным винтом. Установка имеет локальную систему управления, подключаемую к системе управления высшего уровня.
Известен электромеханический привод гребного винта (патент RU №2392180 от 11.01.2009, прототип), включающий: судовой валопровод с валом с гребным винтом, дейдвудным, опорным и упорным подшипниками; зубчатый редуктор, имеющий корпус, установленные в корпусе входной и выходной валы; муфту, соединяющую выходной вал редуктора с валом судового валопровода; блоки управления электроприводом; источник электропитания, соединенный с электродвигателями через блоки управления ими; главный блок управления электроприводами (включающий задатчик частоты вращения роторов электродвигателей); датчики углового положения выходного вала каждого электропривода, соединенные интерфейсными шинами с соответствующими блоками управления электродвигателями; датчик углового положения выходного вала редуктора, соединенный интерфейсной шиной с главным блоком управления.
Известен способ работы много двигательного электромеханического привода с вентильными электродвигателями с датчиками положения ротора (http://www.kaskod.ru/product/motorsrm/srm_article01/) с микропроцессорным блоком управления, электронным коммутатором и электромеханическим преобразователем, включающий: пуск многодвигательного электромеханического привода по сигналам, подаваемым главным блоком управления (ГБУ) в блоки управления следящих электроприводов в соответствии с алгоритмами, заложенными в программы управления; разгон и торможение приводимого объекта с необходимым ускорением по программе, задаваемой ГБУ и выдаваемым сигналам, преобразуемым в блоках управления следящих электроприводов; отслеживание углового положения главного выходного вала и приводимого объекта по сигналам, поступающим от ГБУ и преобразуемым в блоках управления следящих электроприводов; остановка всех электродвигателей и приводимого объекта в заданном ГБУ угловом положении валов по сигналам, поступающим от ГБУ и преобразуемым в блоках управления следящих электроприводов; изменение направления вращения главного вала с приводимым объектом по сигналам, поступающим от ГБУ и преобразуемым в блоках управления следящих электроприводов.
В данном способе работы многодвигательного электромеханического привода не предусмотрена возможность свободного вращения главного вала с приводимым объектом.
Технической задачей изобретения является упрощение конструкции и уменьшение массы электропривода гребного винта судна при обеспечении резервирования электроприводов, сокращение времени замены отдельного электропривода при выходе его из строя.
Техническая задача решена в конструкции электромеханического привода гребного винта, содержащей: судовой валопровод с валом с гребным винтом, дейдвудным, опорным и упорным подшипниками; зубчатый редуктор, имеющий корпус с одним выходным и несколькими входными валами; установленное на выходном валу в корпусе редуктора по меньшей мере одно цилиндрическое зубчатое колесо с двумя зубчатыми венцами; зубчатую шестерню, установленную на каждом из входных валов по окружности вокруг каждого из зубчатых венцов; следящие электроприводы, установленные на корпусе редуктора, выходные валы которых имеют шестерни и являются входными валами зубчатого редуктора; муфту, соединяющую выходной вал редуктора с валом судового валопровода; блоки управления следящими электроприводами, каждый из которых установлен на электродвигателе электропривода; источник электропитания, соединенный с электроприводами через блоки управления ими; главный блок управления следящими электроприводами (включающий задатчик частоты вращения роторов электродвигателей); датчики углового положения выходного вала каждого следящего электропривода, соединенные интерфейсными шинами с соответствующими блоками управления; датчик углового положения выходного вала редуктора, соединенный интерфейсной шиной с главным блоком управления, при этом зубья каждого из двух зубчатых венцов образованы циклоидальной поверхностью цилиндрического зубчатого колеса; каждая шестерня на входном валу редуктора является однозубой, выполнена в виде цилиндрического эксцентрика с установленным на нем подшипником и, взаимодействуя с зубчатым венцом, образует эксцентриково-циклоидальную передачу; входные валы с цилиндрическими эксцентриками с подшипниками установлены вокруг каждого зубчатого венца; количество следящих электроприводов с входными валами с цилиндрическими эксцентриками с подшипниками, выбирается из интервала целых чисел по зависимости:
где n - количество следящих электроприводов каждого из двух зубчатых венцов колеса;
Re - радиус окружности, на которой размещены оси входных валов, описанной относительно оси главного выходного вала;
Re=Rmax-e±rn,
Rmax - радиус окружности, описанной относительно вершин зубьев или впадин колеса внешней или внутренней эксцентриково-циклоидальной передачи;
е - эксцентриситет цилиндрического эксцентрика;
rп - внешний радиус подшипника, установленного на цилиндрическом эксцентрике;
+rп - для внешней эксцентриково-циклоидальной передачи;
-rп - для внутренней эксцентриково-циклоидальной передачи;
ДЭД - максимальный диаметр (размер) корпуса следящего электропривода.
Эксцентриково-циклоидальная передача в редукторе может быть как внешней, так и внутренней.
Для упрощения конструкции редуктора эксцентриково-циклоидальное зацепление является внешним, зубчатое колесо является сборным и может состоять из ступицы с диском и двойного зубчатого венца, жестко закрепленного на диске, или состоять из ступицы с двумя дисками и колец с зубчатыми венцами, жестко закрепленных на каждом диске.
Для обеспечения большей равномерности передачи крутящего момента от эксцентриков к валу одно кольцо с зубчатым венцом имеет угловое расположение относительно другого, такое, что его зубья находятся напротив впадин другого.
Для упрощения технологии изготовления зубчатый венец циклоидального цилиндрического зубчатого колеса состоит из набора закрепленных на диске крепежными деталями секторных частей, на каждой из которых выполнен один или несколько зубьев.
Для уменьшения массы и габаритов каждый электродвигатель следящего электропривода является бесколлекторным, постоянного тока, с возбуждением от постоянных магнитов, частота вращения ротора каждого электродвигателя находится в интервале 7000…100000 мин-1, вал электродвигателя соединен с выходным валом волновым редуктором с телами вращения, имеющим одну или две ступени.
Преимущества электромеханического привода предлагаемой конструкции могут быть реализованы при описанном ниже способе его работы.
Способ работы электромеханического привода гребного винта, обеспечивающий начало хода судна вперед или назад, разгон при совершении хода, установившееся движение с постоянной скоростью, свободное или активное торможение, включающий: пуск электромеханического привода с гребным винтом, обеспечивающий начало хода вперед или назад, по сигналам, подаваемым ГБУ в блоки управления следящих электроприводов в соответствии с алгоритмами, заложенными в программы управления; разгон судна с необходимым ускорением до установившейся скорости движения по программе, задаваемой ГБУ и выдаваемым сигналам, преобразуемым в блоках управления следящих электроприводов; изменение скорости судна при отслеживании углового положения судового валопровода и гребного винта по сигналам, поступающим от ГБУ и преобразуемым в блоках управления следящих электроприводов; свободное торможение судна после остановки всех следящих электроприводов по сигналам, поступающим от ГБУ и преобразуемым в блоках управления следящих электроприводов; активное торможение судна при изменении направления вращения электродвигателей и валопровода с гребным винтом по сигналам, поступающим от ГБУ и преобразуемым в блоках управления следящих электроприводов, при этом пуск после остановки всех следящих электроприводов при положении цилиндрических эксцентриков в состоянии, выведенном из зацепления с зубчатым колесом, осуществляется подачей сигнала от ГБУ на определение углового положения выходных валов следящих электроприводов, последующее формирование и подачу управляющих сигналов на блоки управления для установки каждого из выходных валов поворотом в заданное взаимное угловое положение линий симметрии цилиндрических эксцентриков и вращения выходных валов следящих электроприводов для начала хода судна вперед или назад; разгон судна с заданным ускорением до установившейся скорости движения осуществляется путем регулирования частоты вращения валов электродвигателей; движение судна при установившейся скорости совершается при поддержании заданного взаимного углового положения линий симметрии эксцентриков в соответствии с алгоритмом, заложенным в программе ГБУ; свободное движение судна совершается после остановки всех следящих электроприводов в состоянии цилиндрических эксцентриков, выведенном из зацепления с зубчатым колесом, осуществляется в момент занятия центрами всех эксцентриков положения на радиальных линиях, соединяющих ось зубчатого колеса с осью каждого вала следящих электроприводов по сигналу от ГБУ в соответствии с программой управления, задаваемой алгоритмом, заложенным в программе ГБУ при последующем свободном вращении зубчатого колеса с главным выходным валом и приводимым объектом; активное торможение судна при изменении направления вращения электродвигателей и валопровода с гребным винтом осуществляется после начала судном свободного движения и установки всех валов следящих электроприводов поворотом в заданное взаимное угловое положение линий симметрии эксцентриков, осуществляемой по сигналам, поступающим от ГБУ в соответствии с алгоритмом, заложенным в его программу и преобразуемым в блоках управления следящих электроприводов.
Технический эффект: упрощение конструкции и уменьшение массы электропривода гребного винта судна при обеспечении резервирования электроприводов, сокращение времени замены отдельного электропривода при выходе его из строя, достигается за счет следующей совокупности отличительных признаков: зубья каждого из двух зубчатых венцов образованы циклоидальной поверхностью цилиндрического зубчатого колеса; каждая шестерня на входном валу редуктора является однозубой, выполнена в виде цилиндрического эксцентрика с установленным на нем подшипником и, взаимодействуя с зубчатым венцом, образует эксцентриково-циклоидальную передачу; входные валы с цилиндрическими эксцентриками с подшипниками установлены вокруг каждого зубчатого венца; количество следящих электроприводов с входными валами с цилиндрическими эксцентриками с подшипниками выбирается из интервала целых чисел по зависимости:
где n - количество следящих электроприводов каждого из двух зубчатых венцов колеса;
Re - радиус окружности, на которой размещены оси входных валов, описанной относительно оси главного выходного вала;
Re=Rmax-e±rn.
Данная совокупность отличительных признаков не обнаружена в ходе проведенного патентно-информационного поиска, следовательно, изобретение соответствует критерию «новизна».
Данная совокупность отличительных признаков не следует явно из уровня техники, поэтому изобретение соответствует критерию «изобретательский уровень».
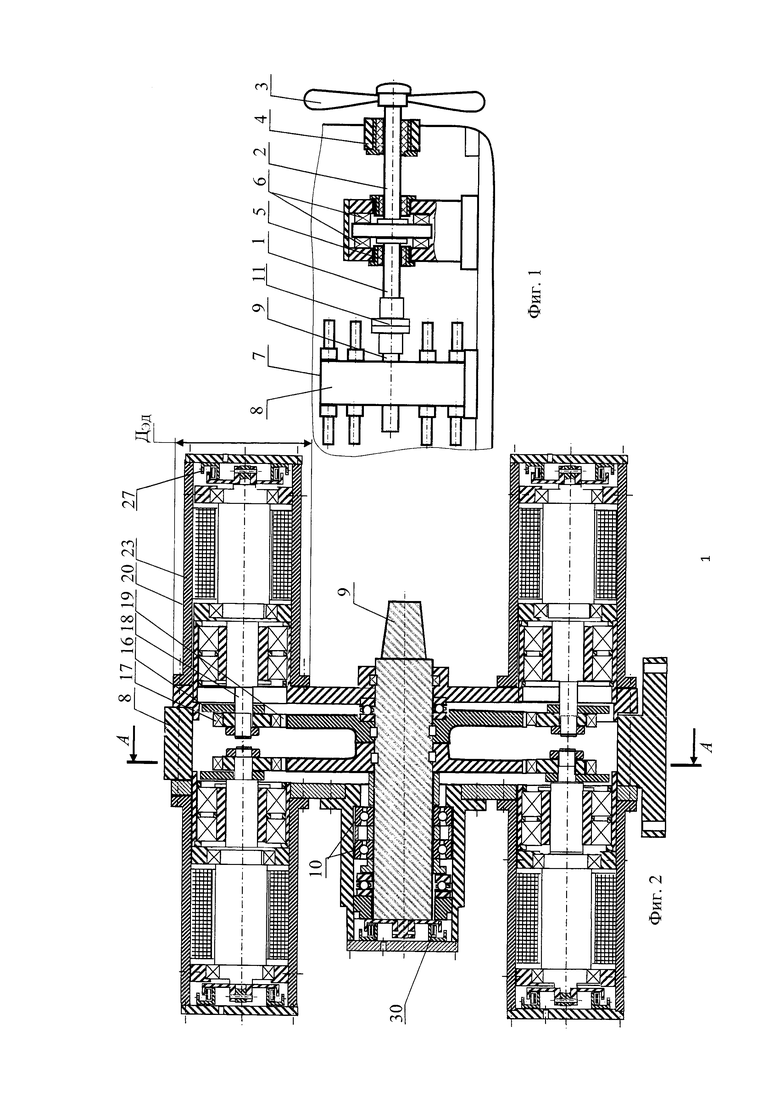
На фиг. 1 показан электромеханический привод гребного винта судна.
На фиг. 2 - конструкция электромеханического привода с двумя эксцентриково-циклоидальными передачами в редукторе и с шестью электроприводами, установленными на каждой из сторон корпуса редуктора.
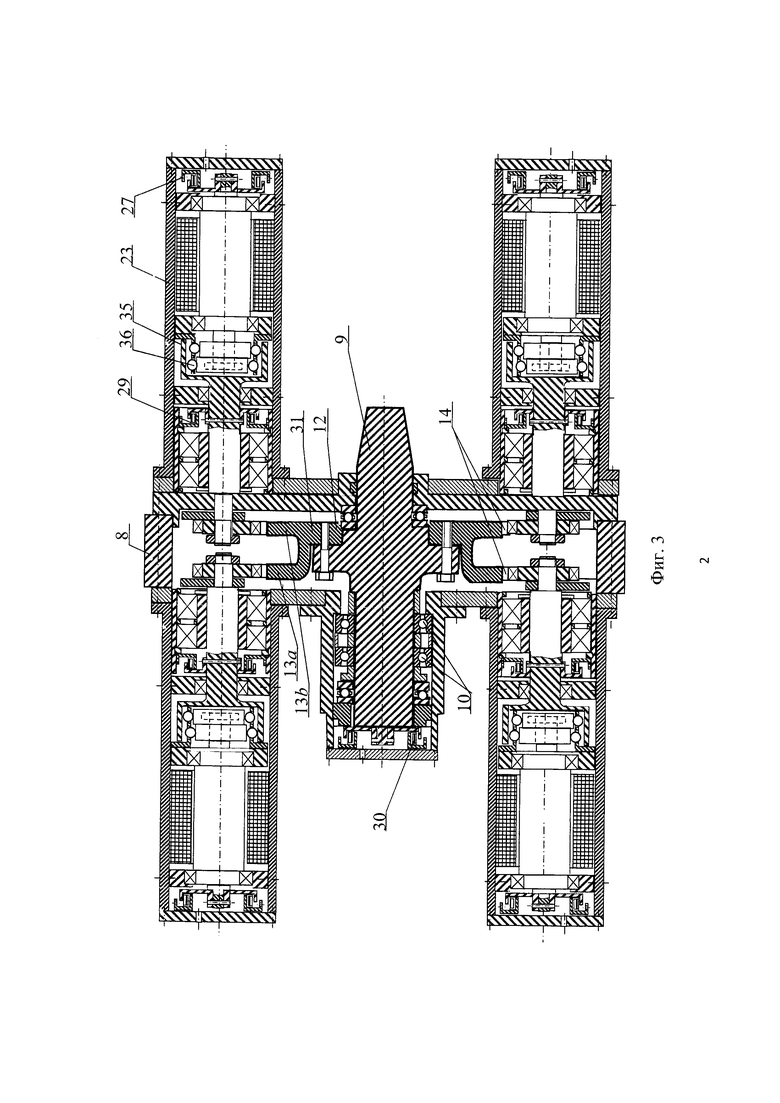
На фиг. 3 - конструкция электромеханического привода с цельным двухвенцовым зубчатым колесом, закрепленным на ступице выходного вала и с несколькими электроприводами через волновой одноступенчатый редуктор с телами качения.
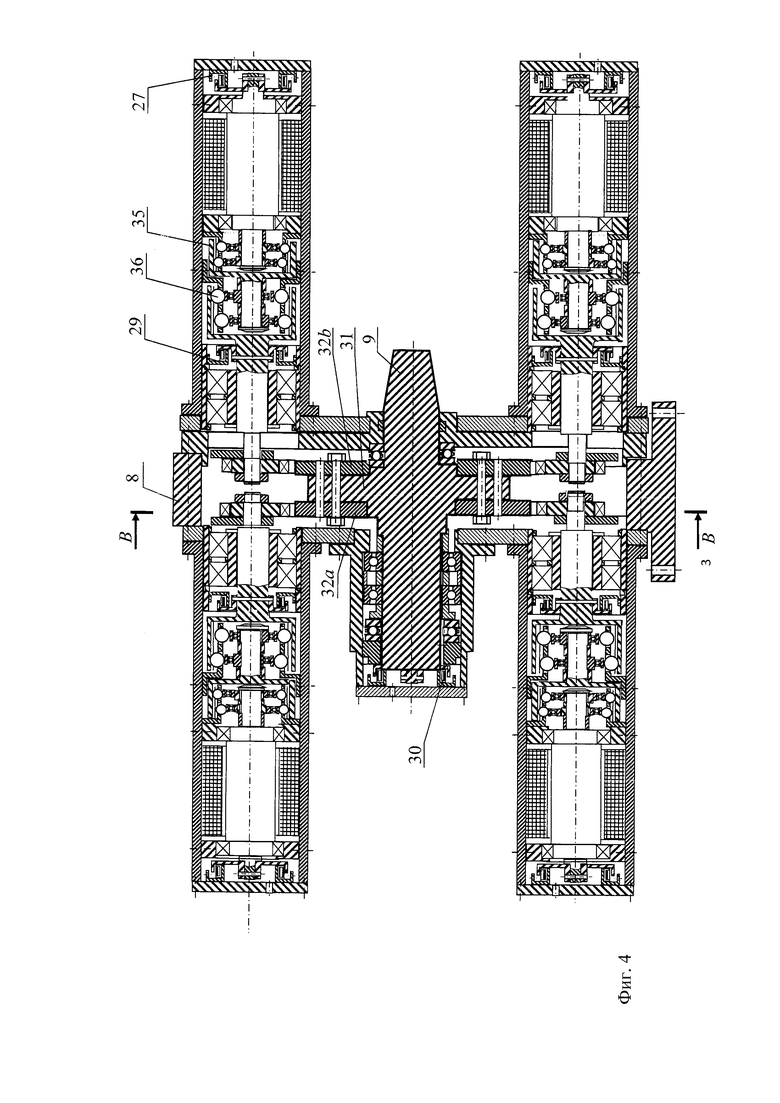
На фиг. 4 - конструкция электромеханического привода с одноступенчатым редуктором с двумя секционными зубчатыми колесами эксцентриково-циклоидальной передачи с несколькими электроприводами эксцентриков через волновой двухступенчатый редуктор с телами качения.
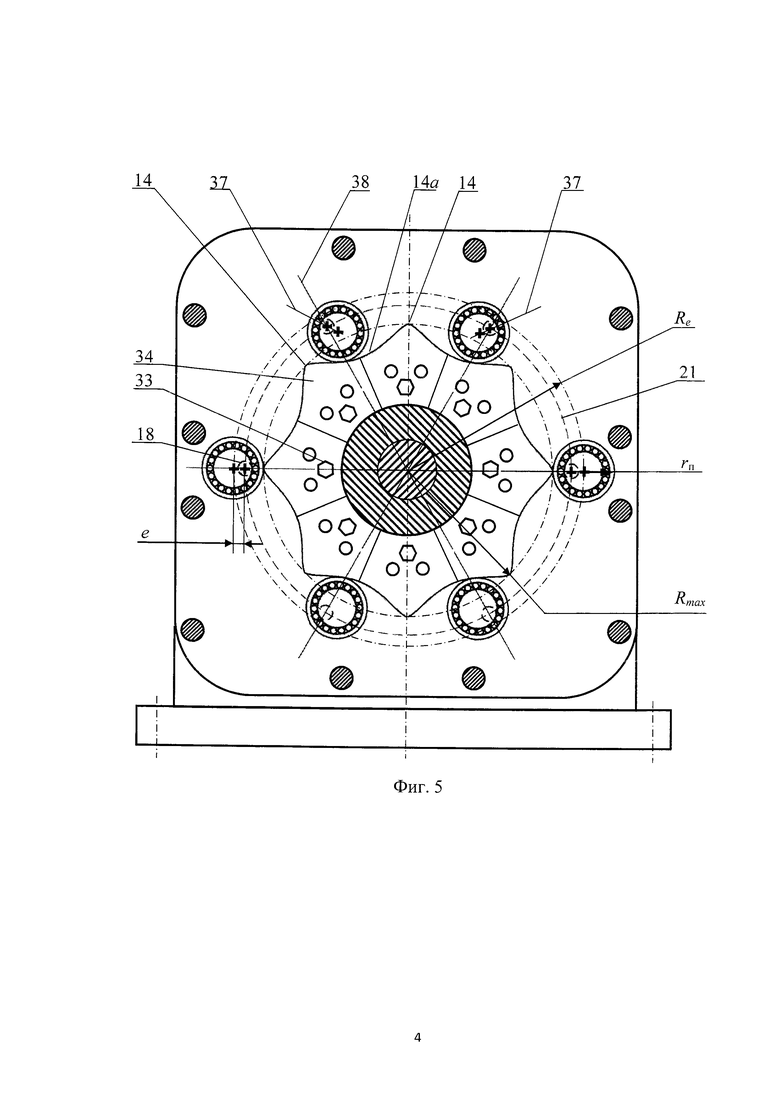
На фиг. 5 - сечение А-А на фиг. 3 при шести эксцентриках в состоянии зацепления с зубчатым колесом.
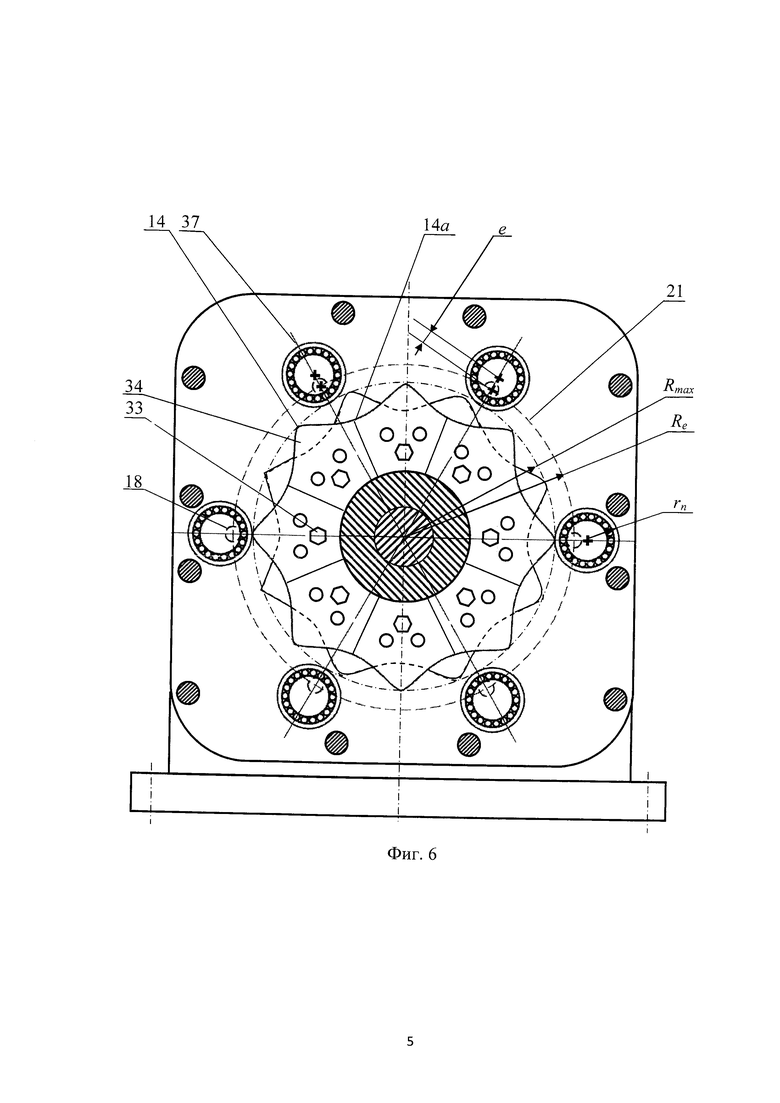
На фиг. 6 - сечение В-В на фиг. 4 при шести эксцентриках в состоянии, выведенном из зацепления с зубчатым колесом.
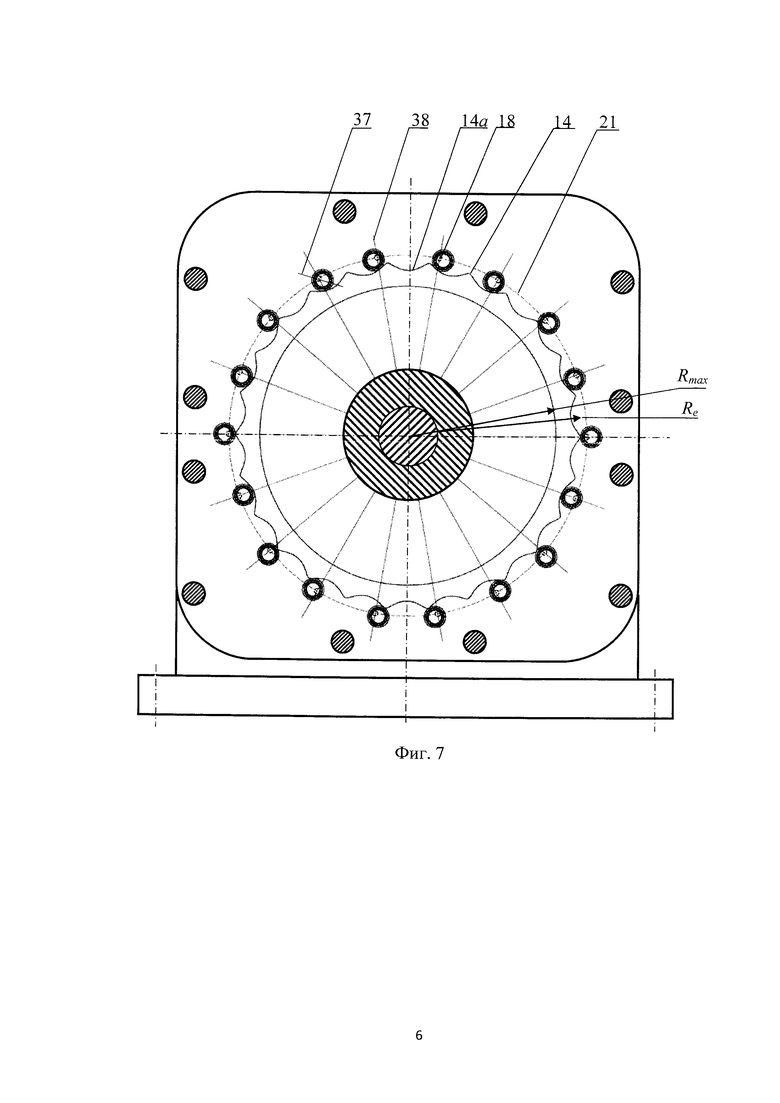
На фиг. 7 - схема расположения множества эксцентриков в состоянии зацепления с зубчатым колесом для мощных электромеханических приводов с эксцентриково-циклоидальной передачей с внешним зацеплением.
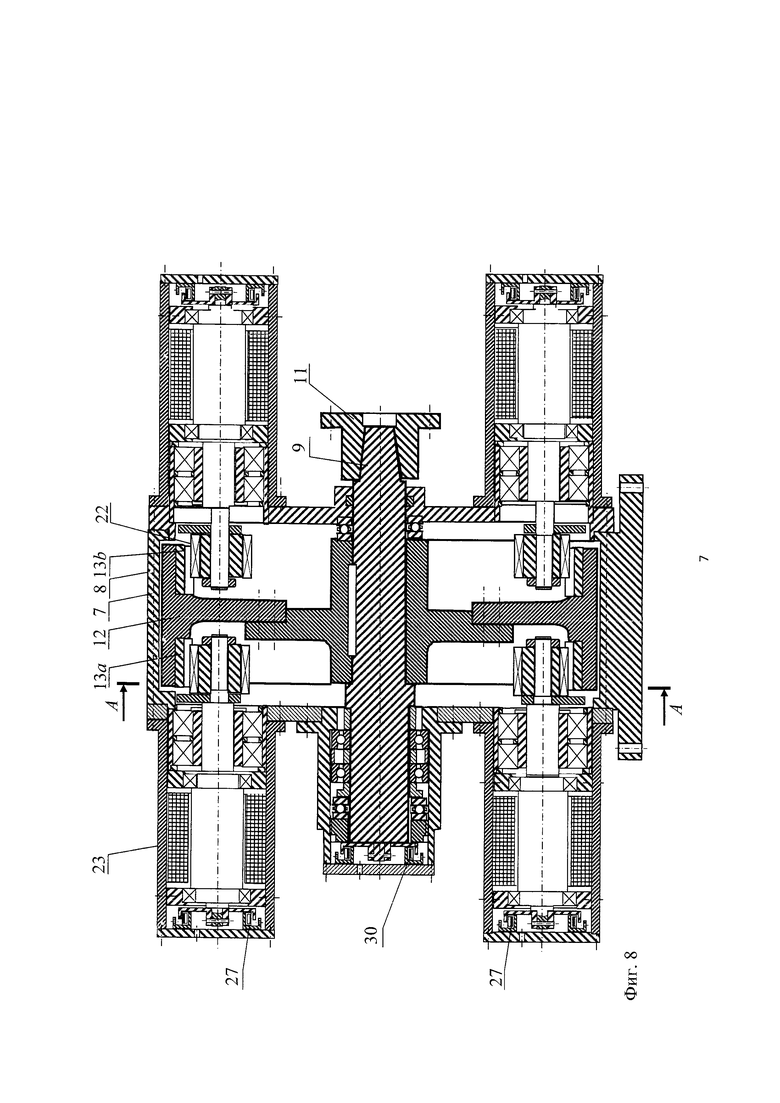
На фиг. 8 - конструкция электромеханического привода с двухвенцовым зубчатым колесом с внутренним эксцентриково-циклоидальным зацеплением.
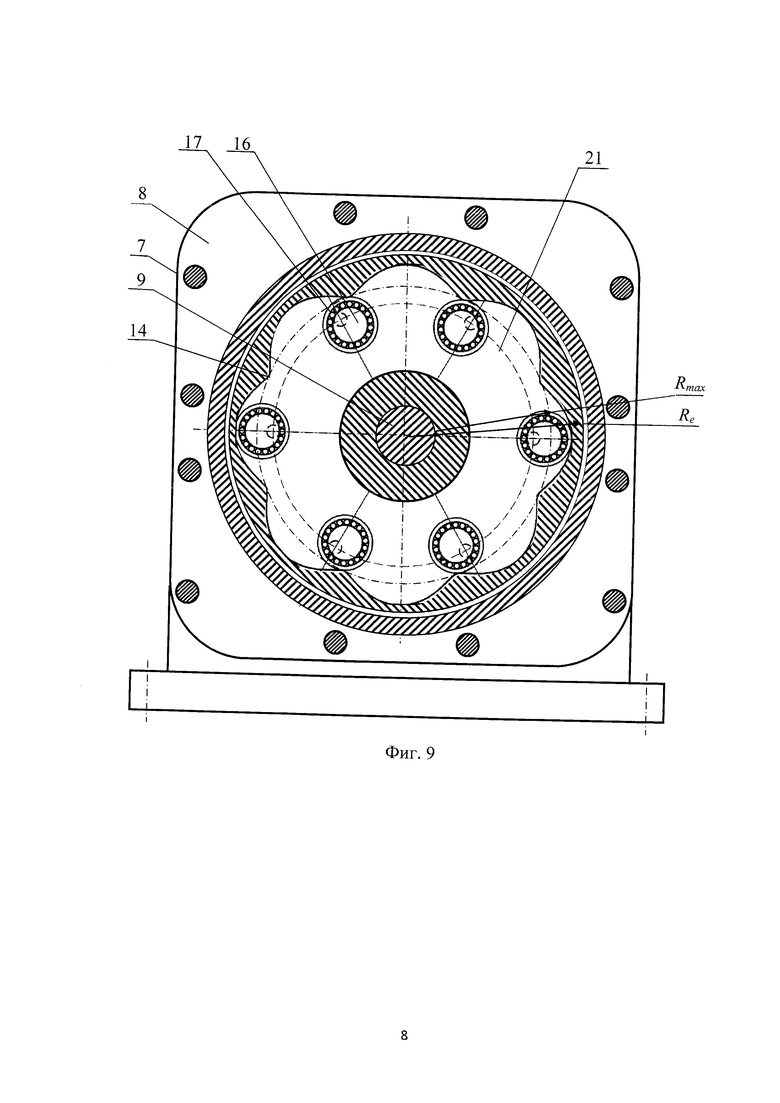
На фиг. 9 - схема расположения шести эксцентриков внутренней эксцентриково-циклоидальной передачи в состоянии зацепления с зубчатым колесом.
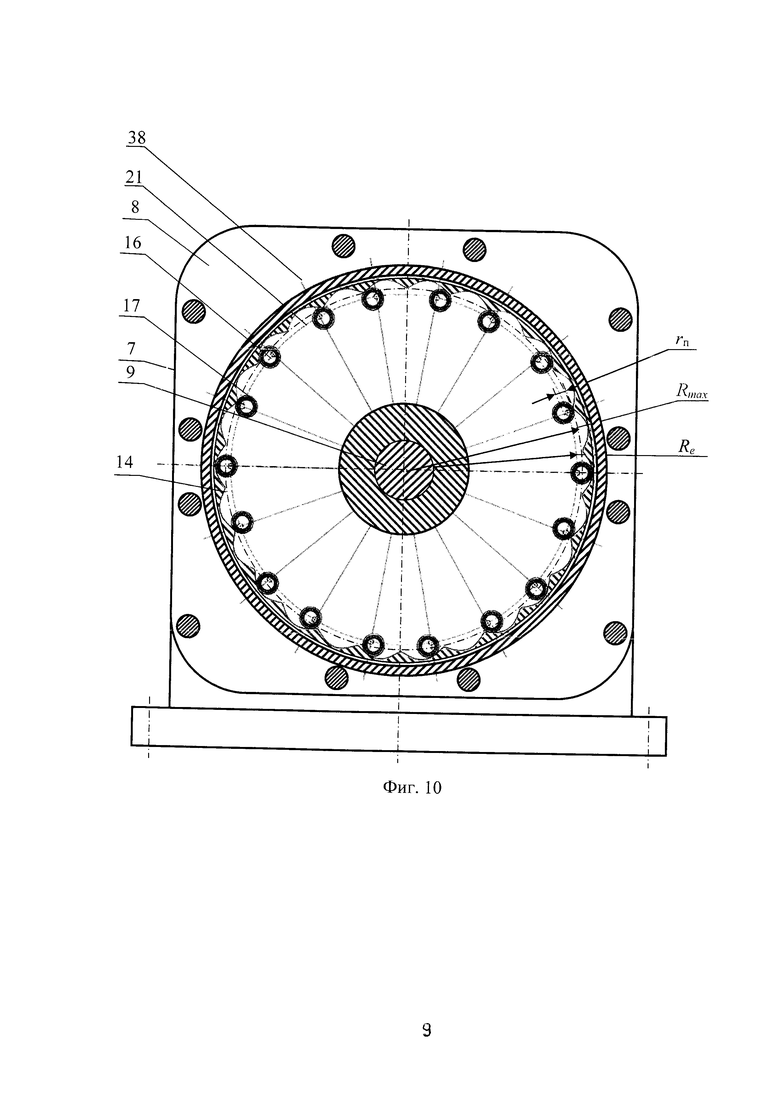
На фиг. 10 - схема расположения множества эксцентриков в состоянии зацепления для мощного электромеханического привода с внутренней эксцентриково-циклоидальной передачей.
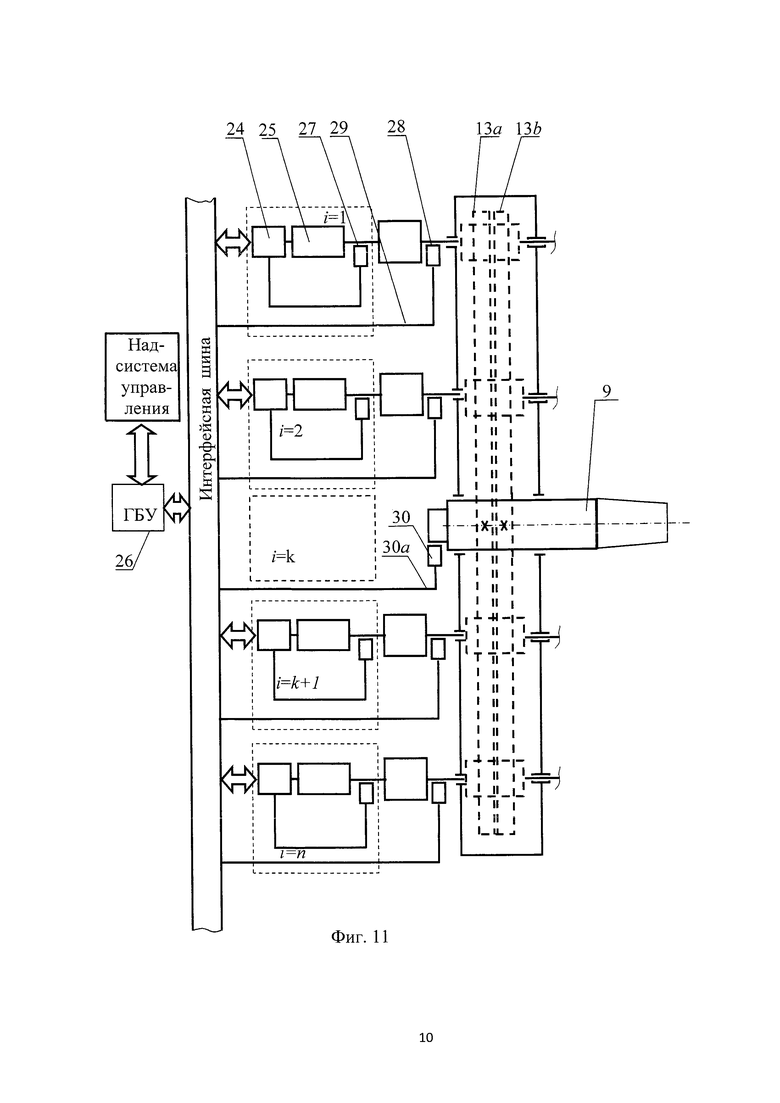
На фиг. 11 - схема системы управления электромеханическим приводом гребного винта судна.
Электромеханический привод гребного винта судна (фиг. 1-11) содержит: судовой валопровод 1 (фиг. 1) с валом 2 с гребным винтом 3, дейдвудным подшипником 4, опорными подшипниками 5 и упорными подшипниками 6; зубчатый редуктор 7, имеющий корпус 8 с одним выходным валом 9, установленным в подшипниках 10 (фиг. 2, 3, 4, 8); муфту 11, соединяющую выходной вал 9 с валом 2 судового валопровода 1; установленное на выходном валу 9 по меньшей мере одно цилиндрическое зубчатое колесо 12 с двумя зубчатыми венцами 13а и 13b, зубья 14 (фиг. 3, 5, 6) каждого из которых образованы циклоидальной поверхностью 15; по меньшей мере шесть цилиндрических эксцентриков 16 (фиг. 5, 6, 9) с установленными на каждом из них подшипниками 17, выполняющими функцию однозубых шестерен, каждый из которых установлен на входном валу 18 вокруг каждого из зубчатых венцов 13а и 13b и образуют внешнюю (фиг. 2-7) или внутреннюю (фиг. 8-10) эксцентриково-циклоидальную передачу 19, в которой силы, действующие при передаче крутящих моментов на зубчатый венец 13а или 13b от противолежащих эксцентриков, уравновешены и не создают изгибающих моментов на валу 9; количество зубьев 14 на каждом зубчатом венце 13а и 13b превышает количество взаимодействующих с ним эксцентриков 16; следящие электромеханические приводы 20, установленные на корпусе 8, выходные валы которых являются входными валами 18 редуктора 7; для судов и кораблей, мощность электромеханических приводов которых составляет несколько мегаватт, оснащенных, например, турбодвигателями (не показаны), диаметр описанной окружности которых достигает нескольких метров, в машинном отделении можно размещать многодвигательные электромеханические приводы с эксцентриково-циклоидальными передачами 19, количество электроприводов 20 которых может составлять несколько десятков (фиг. 7, 10); количество следящих электроприводов 20 с входными валами 18 с цилиндрическими эксцентриками 16 с подшипниками 17 выбирается из интервала целых чисел по зависимости:
где n - количество следящих электроприводов 20 каждого из двух зубчатых венцов 13а и 13b колеса 12; n≥6 для уравновешивания сил, действующих при работе электромеханического привода на вал 9 со стороны эксцентриков 16 и зубчатых венцов 13а и 13b;
Re - радиус окружности 21, на которой размещены оси входных валов 18, описанной относительно оси выходного вала 9;
Re=Rmax-e±rn,
Rmax - радиус окружности, описанной относительно вершин зубьев 14 внешней эксцентриково-циклоидальной передачи 19 (фиг. 5) или впадин колеса внутренней эксцентриково-циклоидальной передачи 22 (фиг. 9);
е - эксцентриситет цилиндрического эксцентрика 16;
rп - внешний радиус подшипника 17, установленного на цилиндрическом эксцентрике 16;
+rп - для внешней эксцентриково-циклоидальной передачи 19 (фиг. 5);
-rп - для внутренней эксцентриково-циклоидальной передачи 22 (фиг. 9);
ДЭД - максимальный диаметр (размер) корпуса 23 следящего электропривода 20 (фиг. 2),
количество зубьев на каждом зубчатом венце превышает количество взаимодействующих с ним эксцентриков, выбирается из интервала целых чисел:
nz≥n+1,
где nz - количество зубьев на каждом зубчатом венце; блоки управления 24 следящими электроприводами 20 (фиг. 11), каждый из которых может быть установлен на корпусе 23 электродвигателя 25 электропривода 20; источник электропитания (не показан), соединенный с электроприводами 20 через блоки 24 управления; главный блок 26 управления следящими электроприводами 20; датчики 27 углового положения ротора электродвигателя 25; датчики 29 (фиг. 3, 4) углового положения выходного вала 18 каждого следящего электропривода 20, соединенные интерфейсными шинами 28 с соответствующими блоками 24 управления; датчик 30 углового положения выходного вала 9 редуктора 7, соединенный интерфейсной шиной 30а с главным блоком управления 26.
Для упрощения конструкции редуктора 7 эксцентриково-циклоидальная передача 19 является внешней (фиг. 4), зубчатое колесо 12 является сборным и может состоять из жестко закрепленных на ступице 31 вала 9 двух дисков 32а и 32b с зубчатыми венцами 13а и 13b.
Для обеспечения большей равномерности передачи крутящего момента от эксцентриков 16 с подшипниками 17 к валу 9 один диск 32b с зубчатым венцом имеет угловое смещение относительно другого диска 32а, при котором зубья 14 одного диска находятся напротив впадин 14а другого диска (фиг. 6).
Для упрощения технологии изготовления зубчатый венец 13а или 13b зубчатого колеса 12 состоит из набора закрепленных на диске 32 крепежными деталями 33 секторных частей 34, на каждой из которых выполнен один или несколько зубьев 14 (фиг. 5).
Для уменьшения массы электропривода 20 и увеличения крутящего момента каждый электродвигатель 25 следящего электропривода 20 является бесколлекторным, постоянного тока, с возбуждением от постоянных магнитов, частота вращения ротора каждого электродвигателя 25 находится в интервале 7000…100000 мин-1, а вал электродвигателя 25 соединен с выходным валом 18 через волновой редуктор 35 с телами вращения 36, имеющий одну (фиг. 3) или две (фиг. 4) ступени.
Способ работы электромеханического привода гребного винта 3 описанной конструкции (фиг. 1-10) обеспечивает начало хода судна вперед или назад, разгон при совершении хода судна, установившееся движение судна с постоянной скоростью, свободное или активное торможение и включает следующие действия: пуск электромеханического привода с гребным винтом, обеспечивающий начало хода вперед или назад, по сигналам, подаваемым главным блоком 26 управления (фиг. 11) в блоки управления 24 следящих электроприводов 20 в соответствии с алгоритмами, заложенными в программы управления; разгон судна с необходимым ускорением до установившейся скорости движения по программе, задаваемой главным блоком 26 управления и выдаваемым сигналам, преобразуемым в блоках управления 24 следящих электроприводов 20; изменение скорости судна при отслеживании углового положения судового валопровода и гребного винта по сигналам, поступающим от главного блока 26 управления и преобразуемым в блоках 24 управления следящих электроприводов 20; свободное торможение судна после остановки всех следящих электроприводов 20 по сигналам, поступающим от главного блока 26 управления и преобразуемым в блоках управления 24 следящих электроприводов 20; активное торможение судна при изменении направления вращения электродвигателей 25 и валопровода 2 с гребным винтом 3 по сигналам, поступающим от главного блока 26 управления и преобразуемым в блоках 24 управления следящих электроприводов 20, при этом пуск после остановки всех следящих электроприводов 20 при положении цилиндрических эксцентриков 16 в состоянии, выведенном из зацепления с зубчатым колесом 12, осуществляется подачей сигнала от главного блока 26 управления на определение углового положения выходных валов 18 следящих электроприводов 20, последующее формирование и подачу управляющих сигналов на блоки 24 управления для установки каждого из выходных валов 18 поворотом в заданное взаимное угловое положение линий 37 симметрии цилиндрических эксцентриков 16 и вращения выходных валов 18 следящих электроприводов 20 для начала хода судна вперед или назад; разгон судна с заданным ускорением до установившейся скорости движения осуществляется путем регулирования частоты синхронного вращения валов 18 электроприводов при поддержании заданного взаимного углового положения линий 37 симметрии эксцентриков 16 в соответствии с алгоритмом, заложенным в программе главного блока 26 управления; движение судна при установившейся скорости совершается при соблюдении заданного взаимного углового положения линий 37 симметрии эксцентриков 16; свободное движение судна совершается после остановки всех следящих электроприводов 20 в состоянии цилиндрических эксцентриков 16, выведенном из зацепления с зубчатым колесом, осуществляется в момент занятия центрами всех эксцентриков 16 положения на радиальных линиях 38 (фиг. 5, 7, 10), соединяющих ось зубчатого колеса 12 с осью каждого вала 18 следящих электроприводов 20 по сигналу от главного блока 26 управления в соответствии с программой управления, задаваемой алгоритмом, заложенным в программе главного блока 26 управления при последующем свободном вращении зубчатого колеса 12 с выходным валом 9 и гребным винтом 3; активное торможение судна при изменении направления вращения роторов электродвигателей 25 и вала 2 с гребным винтом 3 осуществляется после начала свободного движения судна и остановки гребного винта 3 и установки всех валов 18 следящих электроприводов поворотом в заданное взаимное угловое положение линий 37 симметрии эксцентриков 16, осуществляемой по сигналам, поступающим от главного блока 26 управления в соответствии с алгоритмом, заложенным в его программу и преобразуемым в блоках 24 управления следящих электроприводов 20.
При отказе или выходе из строя по меньшей мере одного из электроприводов 20 эксцентрик 16 выводится из зацепления с зубчатым венцом 13а или 13b по команде, подаваемой от главного блока 26 управления на блок 24 управления, после чего все следящие электроприводы 20 могут продолжать работу при уменьшении суммарной мощности, а при наличии резервного электропривода 20 вышедший из строя электропривод 20 может быть заменен. Для обеспечения замены электропривода 20 на судне нет необходимости в мощных подъемных средствах.
Предложенный электромеханический привод и способ его работы в соответствии с изобретением обеспечивает следующие преимущества в сравнении с известными электроприводами гребных винтов судов.
1. Резервирование электроприводов; быструю замену электроприводов, вышедших из строя, в процессе движения судна.
2. Возможность движения судна при выходе из строя части электроприводов.
3. Повышение энергетической эффективности работы электромеханического привода при движении на малой и средней скорости за счет возможности отключения части электроприводов.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД КОЛЕСА ШАССИ САМОЛЕТА И СПОСОБ ЕГО РАБОТЫ | 2015 |
|
RU2583535C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРИВОД И СПОСОБ ЕГО РАБОТЫ | 2015 |
|
RU2583843C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД ПОВОРОТА НОСОВОЙ ОПОРЫ ШАССИ САМОЛЕТА И СПОСОБ ЕГО РАБОТЫ | 2015 |
|
RU2583518C1 |
| СИСТЕМА РУЛЕВЫХ ПОВЕРХНОСТЕЙ С ЭЛЕКТРОМЕХАНИЧЕСКИМИ ПРИВОДАМИ ДЛЯ УПРАВЛЕНИЯ ОСНОВНЫМИ ЛЕТНЫМИ ФУНКЦИЯМИ САМОЛЕТА | 2016 |
|
RU2622321C1 |
| Электромеханический привод | 2018 |
|
RU2722890C2 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР | 1999 |
|
RU2153613C1 |
| ПЛАНЕТАРНО-ЦЕВОЧНЫЙ ЭЛЕКТРОПРИВОД | 2019 |
|
RU2714568C1 |
| ЭКСЦЕНТРИКОВО-ЦИКЛОИДАЛЬНОЕ ЗАЦЕПЛЕНИЕ СОСТАВНЫХ ЗУБЧАТЫХ ПРОФИЛЕЙ | 2008 |
|
RU2385435C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ЛИНЕЙНЫЙ ПРИВОД | 2012 |
|
RU2522646C2 |
| ПЛАНЕТАРНЫЙ РЕДУКТОР С ДВУМЯ СООСНЫМИ ВЫХОДНЫМИ ВАЛАМИ ПРОТИВОПОЛОЖНОГО ВРАЩЕНИЯ | 2016 |
|
RU2729324C2 |
Группа изобретений относится к судовым гребным электрическим установкам, обеспечивающим экономичные режимы движения, и способу их работы. Электромеханический привод гребного винта судна содержит: судовой валопровод с гребным винтом, дейдвудным, опорным и упорным подшипниками; зубчатый редуктор, имеющий выходной и несколько входных валов; установленное на выходном валу в корпусе редуктора цилиндрическое зубчатое колесо с двумя зубчатыми венцами; следящие электроприводы; блоки управления следящими электроприводами; главный блок управления; датчики углового положения выходного вала каждого следящего электропривода; датчик углового положения выходного вала редуктора, соединенный интерфейсной шиной с главным блоком управления, при этом зубья каждого из двух зубчатых венцов колеса образованы циклоидальной поверхностью, взаимодействуя с шестерней, выполненной в виде цилиндрического эксцентрика с установленным на нем подшипником, образуя эксцентриково-циклоидальную передачу; входные валы зубчатого редуктора установлены вокруг каждого зубчатого венца колеса. Обеспечивается возможность резервирования электроприводов для быстрой замены, возможность движения судна при выходе из строя части электроприводов и повышение энергетической эффективности работы электромеханического привода при движении на малой и средней скорости за счет возможности отключения части электроприводов. 2 н. и 8 з.п. ф-лы, 11 ил.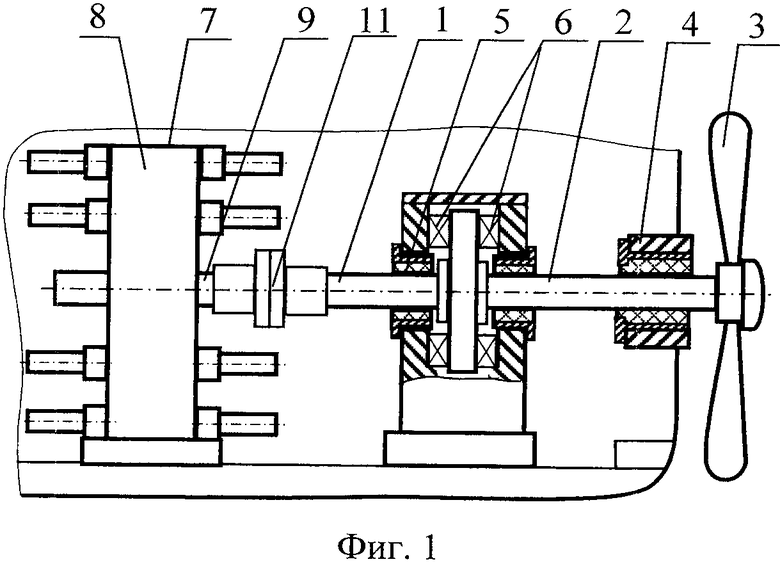
1. Электромеханический привод гребного винта судна, содержащий: судовой валопровод с валом с гребным винтом, дейдвудным, опорным и упорным подшипниками; зубчатый редуктор, имеющий корпус с одним выходным и несколькими входными валами; муфту, соединяющую выходной вал редуктора с валом судового валопровода; установленное на выходном валу в корпусе редуктора по меньшей мере одно цилиндрическое зубчатое колесо с двумя зубчатыми венцами; зубчатую шестерню, установленную на каждом из входных валов по окружности вокруг каждого из зубчатых венцов; следящие электроприводы, установленные на корпусе редуктора, выходные валы которых имеют шестерни и являются входными валами зубчатого редуктора; блоки управления следящими электроприводами, каждый из которых установлен на электродвигателе электропривода; источник электропитания, соединенный с электроприводами через блоки управления ими; главный блок управления следящими электроприводами (включающий задатчик частоты вращения роторов электродвигателей); датчики углового положения выходного вала каждого следящего электропривода, соединенные интерфейсными шинами с соответствующими блоками управления; датчик углового положения выходного вала редуктора, соединенный интерфейсной шиной с главным блоком управления, отличающийся тем, что зубья каждого из двух зубчатых венцов колеса образованы циклоидальной поверхностью; шестерня на каждом входном валу редуктора является однозубой, выполнена в виде цилиндрического эксцентрика с установленным на нем подшипником и, взаимодействуя с зубчатым венцом, образует эксцентриково-циклоидальную передачу; входные валы зубчатого редуктора, каждый - с цилиндрическим эксцентриком с подшипником, установлены вокруг каждого зубчатого венца колеса; количество следящих электроприводов с входными валами с цилиндрическими эксцентриками с подшипниками выбирается из интервала целых чисел по зависимости:
где n - количество следящих электроприводов каждого из двух зубчатых венцов колеса;
Re - радиус окружности, на которой размещены оси входных валов, описанной относительно оси выходного вала;
Re=Rmax-e±rп,
Rmax - радиус окружности, описанной относительно вершин зубьев или впадин колеса внешней или внутренней эксцентриково-циклоидальной передачи;
е - эксцентриситет цилиндрического эксцентрика;
rп - внешний радиус подшипника, установленного на цилиндрическом эксцентрике;
+rп - для внешней эксцентриково-циклоидальной передачи;
-rп - для внутренней эксцентриково-циклоидальной передачи;
ДЭД - максимальный диаметр (размер) корпуса следящего электропривода.
2. Электромеханический привод по п.1, отличающийся тем, что эксцентриково-циклоидальная передача является внешней.
3. Электромеханический привод по п.2, отличающийся тем, что зубчатое колесо является сборным, состоящим из ступицы с диском и двойного зубчатого венца, жестко закрепленного на диске.
4. Электромеханический привод по п.2, отличающийся тем, что зубчатое колесо является сборным, состоящим из ступицы с двумя дисками и колец с зубчатыми венцами, жестко закрепленных на каждом диске.
5. Электромеханический привод по п.4, отличающийся тем, что одно кольцо с зубчатым венцом имеет угловое расположение относительно другого, такое, что зубья одного кольца находятся напротив впадин другого.
6. Электромеханический привод по п.4, отличающийся тем, что зубчатый венец циклоидального цилиндрического зубчатого колеса состоит из набора закрепленных на диске крепежными деталями секторных частей, на каждой из которых выполнен один или несколько зубьев.
7. Электромеханический привод по п.1, отличающийся тем, что каждый электродвигатель следящего электропривода является бесколлекторным, постоянного тока, с возбуждением от постоянных магнитов.
8. Электромеханический привод по п.1, отличающийся тем, что частота вращения ротора каждого электродвигателя находится в интервале 7000…100000 мин-1, вал ротора электродвигателя соединен с выходным валом следящего электропривода волновым одноступенчатым или двухступенчатым редуктором с телами вращения, имеющим одну или две ступени.
9. Электромеханический привод по п.1, отличающийся тем, что эксцентриково-циклоидальная передача является внутренней, а эксцентрики с подшипниками размещены на выходных валах следящих электроприводов.
10. Способ работы электромеханического привода гребного винта по п.1, обеспечивающий начало хода судна вперед или назад, разгон при совершении хода, установившееся движение с постоянной скоростью, свободное или активное торможение, включающий: пуск электромеханического привода с гребным винтом, обеспечивающий начало хода вперед или назад, по сигналам, подаваемым главным блоком управления в блоки управления следящих электроприводов в соответствии с алгоритмами, заложенными в программы управления; разгон судна с необходимым ускорением до установившейся скорости движения по программе, задаваемой главным блоком управления и выдаваемым сигналам, преобразуемым в блоках управления следящих электроприводов; изменение скорости судна при отслеживании углового положения судового валопровода и гребного винта по сигналам, поступающим от главного блока управления и преобразуемым в блоках управления следящих электроприводов; свободное торможение судна после остановки всех следящих электроприводов по сигналам, поступающим от главного блока управления и преобразуемым в блоках управления следящих электроприводов; активное торможение судна при изменении направления вращения электродвигателей и валопровода с гребным винтом по сигналам, поступающим от главного блока управления и преобразуемым в блоках управления следящих электроприводов, отличающийся тем, что пуск после остановки всех следящих электроприводов при положении цилиндрических эксцентриков в состоянии, выведенном из зацепления с зубчатым колесом, осуществляется подачей сигнала от главного блока управления на определение углового положения выходных валов следящих электроприводов, последующее формирование и подачу управляющих сигналов на блоки управления для установки каждого из выходных валов поворотом в заданное взаимное угловое положение линий симметрии цилиндрических эксцентриков и вращения выходных валов следящих электроприводов для начала хода судна вперед или назад; разгон судна с заданным ускорением до установившейся скорости движения осуществляется путем регулирования частоты вращения валов электродвигателей; движение судна при установившейся скорости совершается при поддержании заданного взаимного углового положения линий симметрии эксцентриков в соответствии с алгоритмом, заложенным в программе главного блока управления; свободное движение судна совершается после остановки всех следящих электроприводов в состоянии цилиндрических эксцентриков, выведенном из зацепления с зубчатым колесом, осуществляется в момент занятия центрами всех эксцентриков положения на радиальных линиях, соединяющих ось зубчатого колеса с осью каждого вала следящих электроприводов по сигналу от главного блока управления в соответствии с программой управления, задаваемой алгоритмом, заложенным в программе главного блока управления при последующем свободном вращении зубчатого колеса с главным выходным валом и приводимым объектом; активное торможение судна при изменении направления вращения электродвигателей и валопровода с гребным винтом осуществляется после начала судном свободного движения и установки всех валов следящих электроприводов поворотом в заданное взаимное угловое положение линий симметрии эксцентриков, осуществляемой по сигналам, поступающим от главного блока управления в соответствии с алгоритмом, заложенным в его программу и преобразуемым в блоках управления следящих электроприводов.
| ГРЕБНАЯ ЭЛЕКТРИЧЕСКАЯ УСТАНОВКА (ВАРИАНТЫ) | 2009 |
|
RU2392180C1 |
| СУДОВАЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2012 |
|
RU2503580C1 |
| СПОСОБ ПОЛУЧЕНИЯ 7-АМИНОПИРИДО[1,2-А][1,3]БЕНЗИМИДАЗОЛА | 2003 |
|
RU2236409C1 |
| US 9073607 B2, 07.07.2015 | |||
| СУДОВАЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2013 |
|
RU2521883C1 |

