Способ проведения поисково-спасательных работ относится к области обеспечения безопасности в чрезвычайных ситуациях (ЧС) и может быть использован для поиска и спасения пострадавших в зонах ЧС.
Известен способ использования беспилотных воздушных судов (БВС) [1] военно-медицинского назначения с применением роевого взаимодействия [2] суть которого заключается в том, что используется множество одинаковых БВС, одновременное взаимодействие которых позволяет решить одинаковые медицинские задачи. Недостатками этого способа является отсутствие:
- специализации по функциональному назначению при использовании БВС;
- сверхширокополосного радара (СШПР) для поиска пострадавших;
- манипулятора медицинского назначения (ММН);
- медицинской сортировки (МС) пострадавших на месте обнаружения.
Известен также способ проведения аварийно-спасательных работ в море [3] с применением БВС, оснащенных видеокамерой, являющийся узкоспециализированным в области обеспечения безопасности. Как следствие, в нем не реализованы функции:
- предварительной оценки зоны ЧС [4];
- использования нескольких специализированных БВС;
- ММН в оборудовании БВС.
Известна концепция оказания экстренной медицинской помощи (ЭМП) пострадавшим в ЧС [5], недостатками которой является отсутствие:
- предварительной оценки ситуации в зоне ЧС [4];
- специализации по функциональному назначению при использовании БВС;
- минимизации уровней воздействия поражающих факторов (ПФ) ЧС [4];
- эвакуации пострадавших из зоны ЧС [4].
Наиболее близким к предполагаемому изобретению является способ проведения поисково-спасательных работ (ПСР) [6] (см. фигуру 1), заключающийся во вводе оператором мобильного телемедицинского комплекса (МТМК) в микрокомпьютер БВС координат границ зоны ЧС, высоты полета, координат точки начала сканирования, траектории и шага сканирования; запуске БВС в зону ЧС; разведке БВС зоны ЧС путем: построения трехмерной карты зоны ЧС; сбора информации о ПФ ЧС; поиске пострадавших и определении места нахождения пострадавших путем сканирования территории зоны ЧС СШПР; определении функционального состояния организма (ФСО) пострадавших с помощью СШПР и сортировке пострадавших; передаче информации от БВС оператору МТМК; обеспечении пострадавших средствами индивидуальной защиты (СИЗ), мобильным телефоном и аптечкой; возвращении БВС.
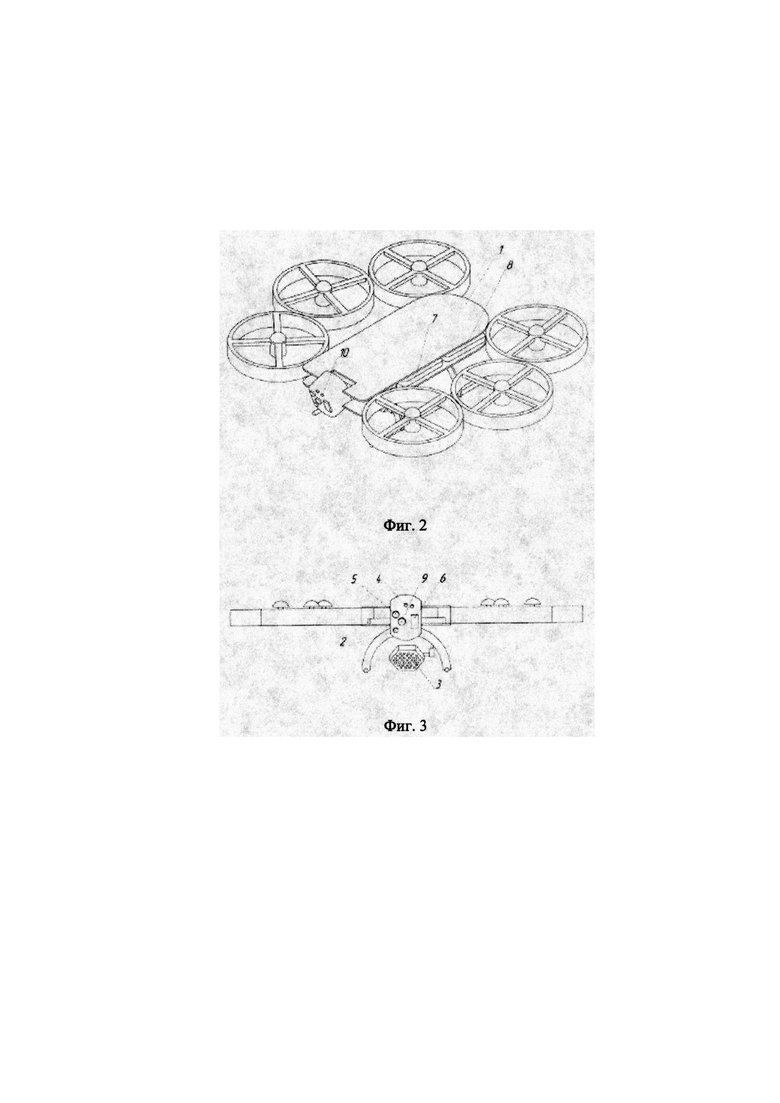
За прототип принят способ проведения ПСР [6] (см. фигуры 2 и 3), особенностью которого является то, что запускаемое БВС является возвращаемым. Полетом БВС управляет оператор МТМК по радиокомандной линии управления посредством анализа изображения взаимного расположения БВС и объектов местности, полученного с телевизионной камеры. После выполнения задания БВС по команде оператора МТМК возвращается на базу.
Перед запуском БВС оператор МТМК задает БВС исходные данные, по которым БВС производит поисковую деятельность. После прибытия в зону ЧС БВС сканирует территорию СШПР, получает результаты, на основании которых рассчитывают расстояние между БВС и пострадавшим и определяют ФСО пострадавшего.
При помощи установленного на БВС газоанализатора определяют уровень углекислого газа в атмосфере. По инфракрасной видеокамере определяют источники огня и повышенной температурной опасности. С помощью лазерного 3D-сканера, производящего построение трехмерной карты местности, определяют местонахождение препятствий, которые необходимо БВС облететь. Данные со всех устройств поступают в микрокомпьютер БВС и оператору МТМК и позволяют «поисково-спасательному отряду определить приоритеты спасения, его пути и быстро произвести спасательную операцию».
В случае нахождения пострадавшего в области сканирования на пульт оператора МТМК подается сигнал и с помощью БВС доставляют СИЗ, мобильный телефон и аптечку в случае, если пострадавший в сознании и находится на поверхности земли.
На фигуре 1 приведена схема алгоритма реализации способа проведения ПСР.
На фигуре 2 приведено «устройство летательного аппарата»: 1 - возвращаемый БВС, 7 - микрокомпьютер, 8 - контейнер для СИЗ, мобильного телефона, аптечки, 10 - радиоретранслятор, используемый для связи между оператором МТМК и БВС.
На фигуре 3 приведен «его вид спереди»: 2 - ГЛОНАСС-приемник, 3 - СШПР, 4 - встроенный газоанализатор, 5 - инфракрасная видеокамера, 6 - лазерный 3D сканер, 9 - цветная видеокамера.
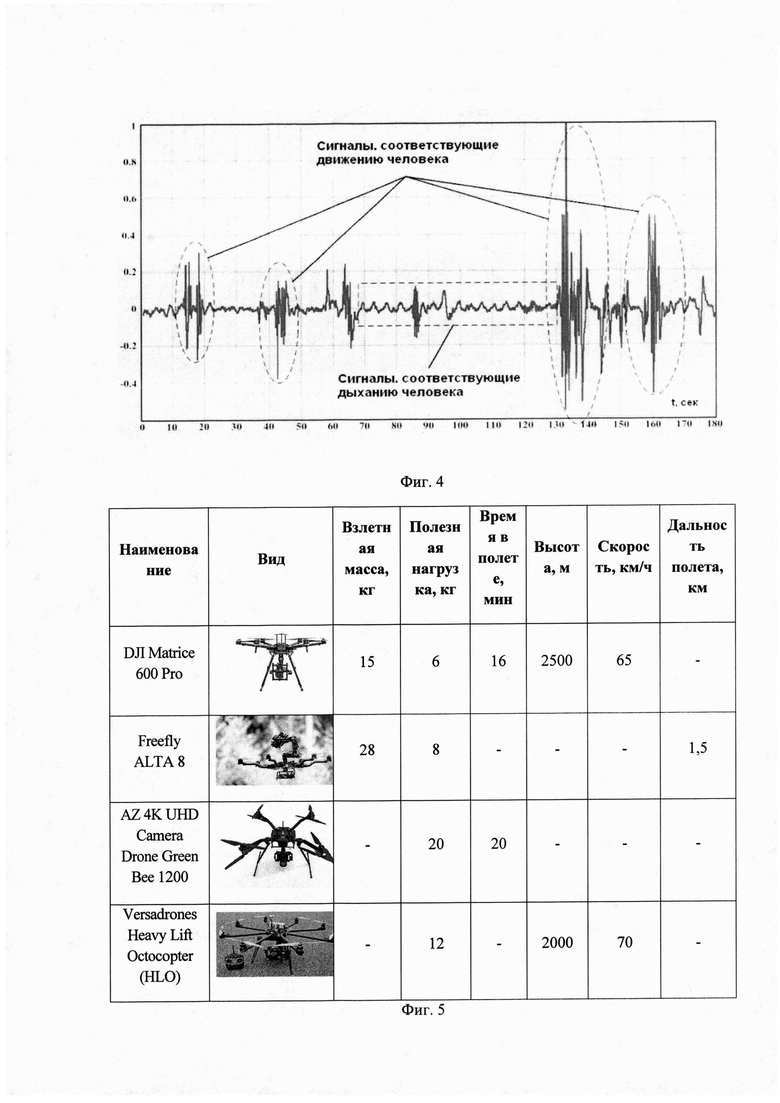
На фигуре 4 приведен типичный сигнал СШПР, содержащий фазы движения человека и дыхания неподвижного человека [7].
На фигуре 5 приведена таблица содержащая обзор характеристик грузовых БВС [8, 9].
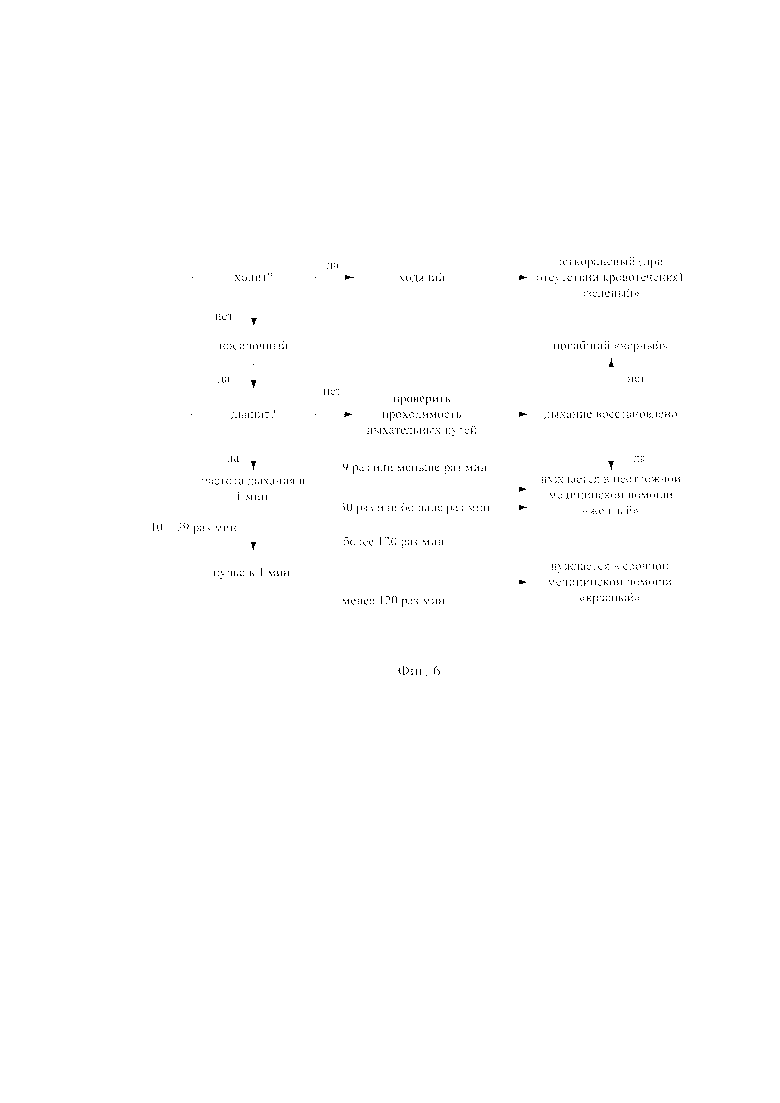
На фигуре 6 приведен алгоритм медицинской сортировки SIEVE [10].
Рассмотрим подробнее состав и назначение модулей известного способа проведения ПСР.
Сообщения о ЧС поступают в Единую дежурно-диспетчерскую службу (ЕДДС) по прямым каналам и линиям связи. При классификации сложившейся ситуации как чрезвычайной, ЕДДС населенного пункта поручает проведение работ в зоне ЧС соответствующим службам, и они выдвигаются в зону ЧС.
Управление БВС осуществляет оператор МТМК в ручном и автоматическом режимах. От выбора режима управления зависит способ ввода информации в микрокомпьютер БВС. Проведение ПСР начинают с того, что оператор МТМК выбирает режим управления БВС - ручной или автоматический.
В случае автоматического управления оператор МТМК выделяет квадрат на электронной карте для ПСР, задает высоту полета, начало координат, направление сканирования местности и шаг сканирования. После включения БВС взлетает и направляется в квадрат к началу координат. За точное позиционирование отвечает ГЛОНАСС-приемник.
При ручном управлении оператор МТМК использует информацию детектируемую оборудованием БВС и, исходя из этого, выбирает траекторию, высоту и скорость полета и сканирования территории.
При реализации известного способа используется дистанционно-пилотируемое возвращаемое БВС вертикального взлета и посадки с изменяемым углом силовых установок. Для запуска такого БВС не требуются специальные устройства запуска (катапульта и пр.) и в зависимости от взлетной массы они могут взлетать либо с руки, либо с произвольной площадки. Взлет может осуществляться в ручном или автоматическом режиме, в зависимости от выбора оператора МТМК и поставленной задачи.
При автоматическом полете БВС на его пути могут попадаться различные препятствия в виде деревьев, стен. Для их детектирования использован лазерный 3D-сканер, сканирующий объемное пространство вокруг БВС, что позволяет, как считают авторы прототипа, облетать препятствия, а инфракрасная видеокамера позволяет определить источники огня и также облететь их. Детектируемая информация накапливается в микрокомпьютере БВС и одновременно передается на компьютер оператора МТМК, где визуализируется в форме 3D-карты.
В ручном режиме пилотирования оператор самостоятельно управляет БВС из МТМК, анализируя данные, полученные с детектируемых устройств. При этом оператор МТМК видит все то, что видит и детектирует БВС.
В дополнение к определению мест нахождения препятствий и наличия источников огня, посредством цветной и инфракрасной видеокамер и лазерного 3D-сканера, измеряется уровень углекислого газа в атмосфере в месте нахождения пострадавшего с помощью встроенного газоанализатора для определения уровня агрессивности ОС.
Выбранная оператором МТМК высота полета влияет на глубину сканирования, так как примененный СШПР работает только на расстоянии до 30 метров, поэтому, чем глубже под завалами и непрозрачными преградами находится пострадавший, тем ниже высота полета БВС.
Сканирование может осуществляться по различным траекториям: поступательно или по кругу, относительно начала координат с заданным шагом сканирования, что является расстоянием между параллельными линиями траектории полета БВС.
В ходе сканирования СШПР передатчик посылает сигнал, и если в зоне его распространения находится пострадавший, сигнал от него отражается и принимается приемником СШПР. В этом случае сканирование приостанавливают для отправки сигнала оператору МТМК с точными координатами пострадавшего, глубиной нахождения и информацией о ФСО пострадавшего.
Экспериментальные работы показали, что сигналы СШПР хорошо отражаются от тела живого человека. Причем формы отраженных сигналов зависят от физиологических параметров человека (сердечной активности: частоты пульса и амплитуды движения грудной клетки - частоты дыхания). Данная зависимость заложена в основу работы СШПР для спасательных работ.
Малая длительность сигнала (единицы наносекунд) обеспечивает высокую точность определения местоположения пострадавшего за преградой и устойчивую работу СШПР в условиях многократных переотражений от окружающих предметов. СШПР измеряет мощность отраженного от объекта сигнала, время и направление его распространения. При движении пострадавшего появляется информация о скорости его передвижения в контролируемой зоне за счет доплеровского смещения частоты, пропорционального радиальной составляющей этой скорости. Если пострадавший неподвижен, то информация, о его присутствии за преградой может быть получена за счет изменения доплеровского смещения частоты сигнала, отраженного от движения грудной клетки человека при его дыхании и сокращений сердца. На фигуре 4 показаны типичные сигналы СШПР, который находится на расстоянии 3 метров от кирпичной стены, имеющей толщину 50 сантиметров и обеспечивает наблюдение пострадавшего за стеной, как при его перемещении по помещению, так и в неподвижном положении - по движению грудной клетки [7].
Все полученные данные поступают на микрокомпьютер БВС, который обрабатывает их и отправляет на компьютер оператора МТМК посредством радиокомандной линии управления. Данные, представленные в компьютере оператора МТМК, позволяют бригаде МТМК определить приоритеты спасения, пути спасения пострадавших и быстро произвести спасательную операцию.
После того, как был обнаружен пострадавший, на компьютере оператора МТМК раздается сигнал и выводятся данные о глубине его нахождения, его ФСО и окружающей его среде, далее оператор МТМК сообщает точные координаты нахождения пострадавшего бригаде МТМК.
После обнаружения БВС пострадавшего оператор МТМК переходит в ручной режим управления БВС для доставки СИЗ, аптечки и мобильного телефона для связи с бригадой МТМК в случае, если пострадавший в сознании и находится на поверхности земли.
Так как БВС является аппаратом вертикального взлета и посадки, то доставка полезного груза к пострадавшему осуществляется достаточно точно. После посадки рядом с пострадавшим в БВС открывается контейнер, в котором содержатся СИЗ, мобильный телефон для связи с бригадой МТМК, а также аптечка.
Этот режим включает оператор МТМК через компьютер. В режиме ручного управления сразу после нажатия кнопки, БВС полетит на базу. С помощью функции автоматического возврата на базу БВС летит в заданную точку согласно последней записи. БВС автоматически проводит сканирование поверхности для посадки и определяет подходящее по рельефу место.
Анализ прототипа показал, что известный способ проведения ПСР имеет ряд существенных недостатков.
При проведении ПСР используют только одно БВС выполняющее функции поиска пострадавших, определения их координат и ФСО, передачи СИЗ, аптечки и мобильного телефона, анализа состояния ОС.
Из-за совмещения функций БВС, в прототипе, перегружен оборудованием, так как на нем установлены: микрокомпьютер, радиоретранслятор, блок ГЛОНАСС, СШПР, газоанализатор, цветная и инфракрасная видеокамеры, лазерный 3D-сканер, комплект СИЗ, аптечка, мобильный телефон, что ведет к повышенному расходованию заряда аккумулятора. Кроме того, заряд аккумулятора расходуется на поддержание связи с оператором МТМК, в том числе, если БВС работает в ручном режиме.
Исходя из этого, вызывает сомнение возможность одного БВС эффективно выполнять все возложенные на него обязанности с таким набором оборудования. Обзор грузовых БВС (см. фигуру 5) позволяет утверждать следующее.
С увеличением массы целевой нагрузки уменьшаются:
- возможность находится в воздухе до 15-20 минут (по данным некоторых источников увеличение массы целевой нагрузки на каждые 6 килограммов уменьшает время в полете в 3 раза),
- дальность полета до 1,5 километров,
- высота полета до 2 километров.
Из всего используемого в известном способе оборудования наибольший вес имеют:
- СШПР - 1,5 - 5 килограммов [6];
- газоанализатор «CheckPoint» - min 0,5 килограмма [7];
- лазерный 3D-сканер - 3,6 килограмма [8];
- комплект СИЗ, аптечка, мобильный телефон - 3 килограмма.
Таким образом, вес целевой нагрузки в известном способе составит порядка 8-9 килограммов, что снижает полетные характеристики более чем в 3 раза и увеличивает скорость расходования заряда аккумулятора. И за оставшееся время он не только не сможет выполнить весь перечень возложенных на него обязанностей, но и долететь до зоны ЧС.
Учитывая, что БВС является многофункциональным устройством, даже при обнаружении нескольких пострадавших он сможет проинформировать оператора МТМК и оказать помощь, обнаруженным пострадавшим, только последовательно, рискуя их жизнями. В медицине катастроф существует понятие «золотой час» - это время, в течение которого оказанная медицинская помощь на месте, либо оперативная доставка пострадавшего в стационар гарантирует ему максимальные шансы выжить и наименьший риск осложнений после травм. Человеческий организм, попадая в экстремальную ситуацию, реагирует моментально включением компенсаторных и защитных механизмов, причем на максимальном уровне, для того чтобы поддержать жизнедеятельность хотя бы в течение часа. Потом начинает уменьшаться кровенаполнение главных органов: сердца и мозга, при этом шансы врачей спасти пострадавшего резко уменьшаются [9].
Оптимальный срок оказания ЭМП - до 30 минут после получения травмы. При остановке дыхания это время сокращается до 5-10 минут. Важность фактора времени подчеркивается тем, что среди лиц, получивших ЭМП в течение первых 30 минут после травмы, осложнения возникают в 2 раза реже, чем у лиц, которым она была оказана позже. По данным Всемирной организации здравоохранения каждый двадцатый из ста погибших в результате несчастных случаев в мирное время могли быть спасены, если бы ЭМП им была оказана на месте происшествия. Своевременно оказанная медицинская помощь имеет решающее значение для сохранения жизни и здоровья пострадавших, снижения инвалидности и летальности [10].
Оборудование БВС не обеспечивает более «тонкое» определение ФСО пострадавшего, например, используя алгоритмы сортировки START или SIEVE и маркировки, тем самым помогая спасателям и врачам.
В ЧС всегда имеет место несоответствие между потребностью в ЭМП и возможностью ее оказания. МС является одним из средств достижения своевременности в оказании ЭМП пострадавшим и представляет собой один из основных принципов медицины катастроф. Сущность МС состоит в распределении пострадавших на группы по принципу нуждаемости в однотипных лечебно-профилактических и эвакуационных мероприятиях, в зависимости от медицинских показаний и конкретных условий обстановки. Чтобы осуществлять МС необходимо определять более «тонкие» параметры, чем просто наличие дыхания у пострадавшего (частота дыхания, пульс), а для этого БВС должно быть обеспечено специальным оборудованием и алгоритмами работы (см. фиг. 6).
Газоанализатор, настроенный на определение концентрации углекислого газа в атмосфере, является, с точки зрения авторов предполагаемого изобретения, бесполезным устройством, так как этот газ является естественным компонентом атмосферы, выделяясь при дыхании всех живых объектов. Но организация сбора и передачи информации о химических факторах техногенного происхождения в условиях ЧС была бы полезной.
Во всех БВС аппаратно и программно реализована функция автоматического обнаружения препятствий, позволяющая распознать объекты на расстоянии до 15 метров без участия оператора МТМК и не врезаться в них, поэтому использование лазерного 3D-сканера для этих целей является лишним.
Отсутствие возможности оказать ЭМП пострадавшему, находящемуся без сознания, так же является недостатком известного способа. Оснащение БВС ММН позволило бы врачу-оператору, находящемуся в МТМК, наложить жгут на рану, сделать инъекцию лекарственного препарата, подать таблетки и воду, закрепить портативный кардиоанализатор, приложить дефибриллятор и осуществить другие необходимые действия для оказания ЭМП.
В известном способе проведения ПСР состав поисково-спасательного отряда не приведен, но это точно не МТМК, который в условиях ЧС является наиболее эффективным и современным оборудованием для проведения ПСР.
Способ проведения ПСР, заключающийся в том, что осуществляют:
- ввод оператором МТМК в микрокомпьютер БВС координат границ зоны ЧС, высоты полета, координат точки начала сканирования, траектории и шага сканирования;
- запуск БВС в зону ЧС;
- разведку БВС зоны ЧС путем:
- построения трехмерной карты зоны ЧС;
- сбора информации о ПФ ЧС;
- поиск пострадавших и определение места нахождения пострадавших путем сканирования территории зоны ЧС СШПР;
- определение ФСО пострадавших с помощью СШПР и сортировку пострадавших;
- передачу информации от БВС оператору МТМК;
- обеспечение пострадавших СИЗ, мобильным телефоном и аптечкой;
- возвращение БВС,
отличающийся тем, что дополнительно осуществляют:
- предварительную оценку зоны ЧС путем:
- анализа карты местности зоны ЧС;
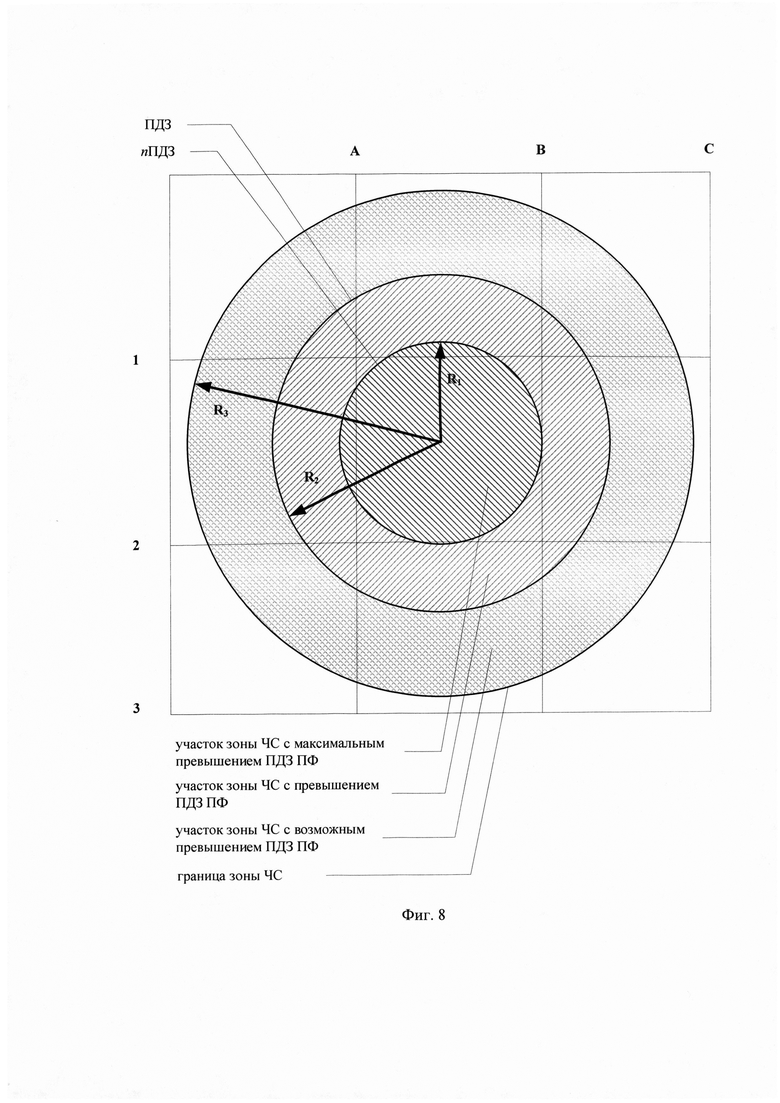
- разделения зоны ЧС на участки: участок зоны ЧС с максимальным превышением предельно допустимого значения (ПДЗ) ПФ, участок зоны ЧС с превышением ПДЗ ПФ, участок зоны ЧС с возможным превышением ПДЗ ПФ;
- выбора и определения координат мест эвакуации и места прибытия бригады МТМК;
- формирование гетерогенной группы из БВС координирующего (БВС КН), поискового (БВС ПН), экологического (БВС ЭН), медицинского (БВС МН) и эвакуационного (БВС ЭвН) назначений;
- распределение гетерогенной группы БВС по участкам зоны ЧС путем направления на участок зоны ЧС:
- с максимальным превышением ПДЗ ПФ БВС КН, БВС ПН, БВС ЭН, БВС МН и БВС ЭвН;
- с превышением ПДЗ ПФ БВС ПН и БВС ЭН;
- с возможным превышением ПДЗ ПФ БВС ПН, при этом БВС выполняют следующие функции:
- БВС КН: ведение команды беспилотных воздушных судов в назначенный участок зоны ЧС, сбор посредством системы громко говорящей связи легкораненых пострадавших, координация легкораненых пострадавших по оказанию взаимопомощи, поиск путей для пешей эвакуации легкораненых пострадавших, вывод легкораненых пострадавших в место эвакуации, встреча бригады МТМК и ее сопровождение к пострадавшим, передача информации оператору МТМК;
- БВС ПН: сканирование, поиск и определение местонахождения пострадавших, оценка и мониторинг ФСО пострадавших, мониторинг участка зоны ЧС;
- БВС ЭН: сбор информации о ПФ в зоне ЧС, минимизация уровня воздействия ПФ в зоне ЧС, обеспечение пострадавших СИЗ, мобильным телефоном, мониторинг участка зоны ЧС;
- БВС МН: обеспечение пострадавших аптечкой, оказание медицинской помощи посредством ММН, производство рентген-снимков, оснащение пострадавших портативным регистратором электрокардиосигналов, маркировка пострадавших;
- БВС ЭвН: эвакуация из зоны ЧС транспортабельных пострадавших, поддержание жизненно важных функций организма пострадавших в ходе эвакуации;
- минимизацию уровней воздействия ПФ с помощью БВС ЭН путем:
- тушения пожара;
- обесточивания токоведущих частей оборудования;
- устранения пробоин в технологических емкостях;
- нейтрализации свободно распространяющих химических веществ;
- оказание пострадавшим медицинской помощи ММН БВС МН путем:
- производства рентген-снимков;
- наложения жгута, повязки, шины;
- оснащения пострадавших портативным регистратором электрокардиосигналов;
- проведения дефибрилляции;
- инъекции лекарственных препаратов;
- маркировки пострадавших;
- корректировку очередности оказания медицинской помощи пострадавшим;
- эвакуацию транспортабельных пострадавших и их жизнеобеспечение БВС ЭвН посредством капсулы реанимации.
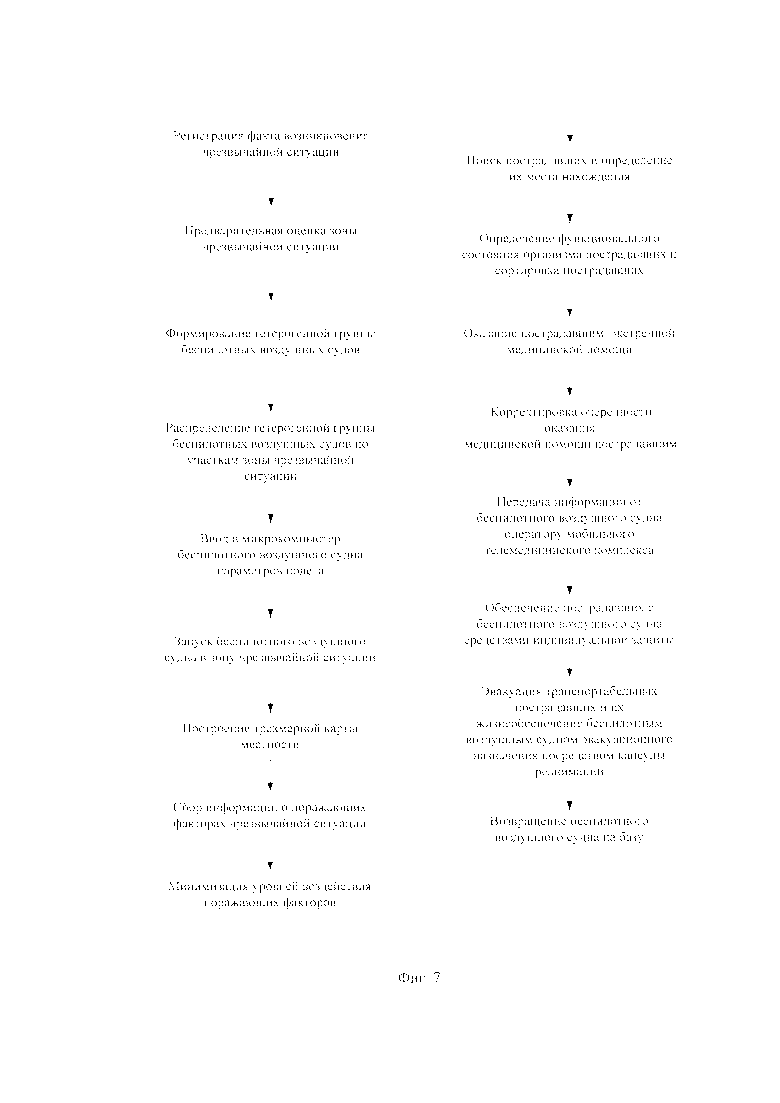
Суть предлагаемого способа проведения ПСР заключается в полной реализации алгоритма проведения ПСР изложенного в [4]. Этот алгоритм включает следующие обязательные этапы: разведку зоны ЧС, поиск пострадавших и определение их места нахождения, минимизацию уровней воздействия ПФ ЧС, оказание пострадавшим медицинской помощи, эвакуацию транспортабельных пострадавших и приведен на фигуре 7.
В известном способе осуществляются только два из приведенных выше этапов: разведка зоны ЧС, поиск пострадавших и определение их места нахождения. Кроме этого, в предлагаемом способе все этапы проведения ПСР осуществляют с использованием гетерогенной группы БВС состоящей из судов различного функционального назначения: БВС КН, БВС ПН, БВС ЭН, БВС МН и БВС ЭвН.
Перед запуском БВС проводят предварительную оценку наличия и значений ПФ в зоне ЧС. Предварительная оценка проводится на основании анализа имеющихся карт местности и прогнозов, проведенных заблаговременно для данного объекта в соответствии требованиями и по методикам, приведенным в [11]. Оценивается, что могло произойти на объекте, исходя из этого, вся зона ЧС делится на участки как показано на фигуре 8.
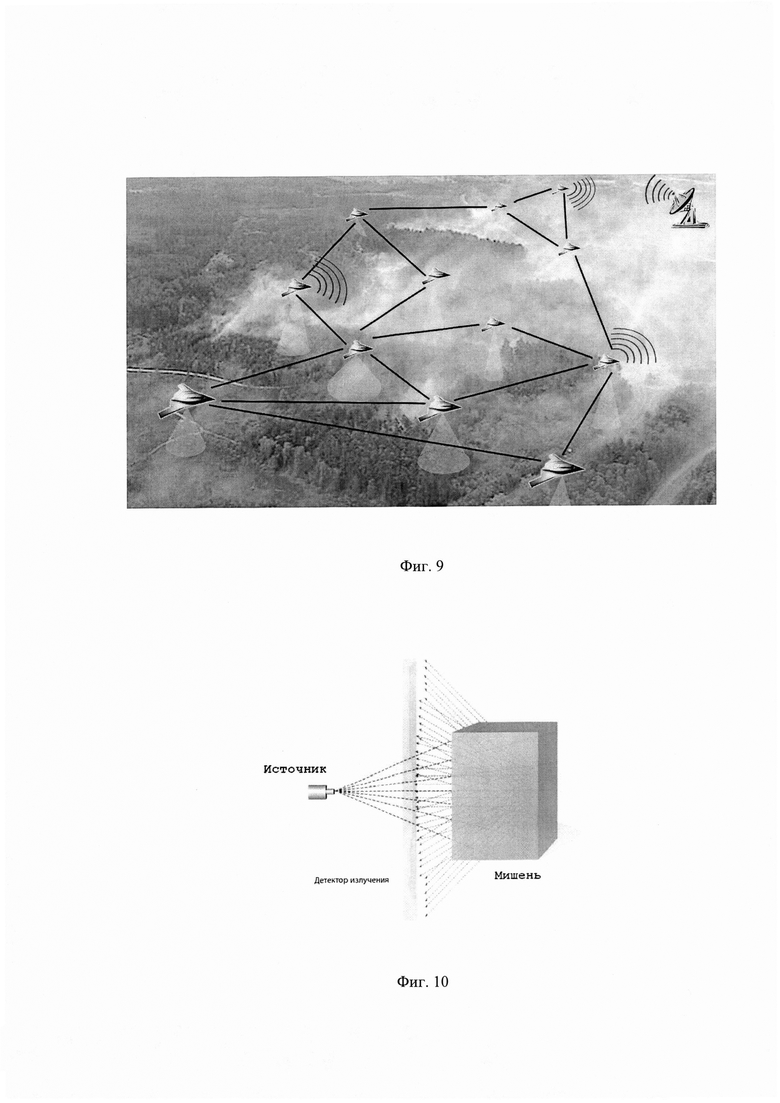
Затем формируются и распределяются гетерогенная группа БВС по зонам ЧС. При этом на участок зоны ЧС с максимальным превышением ПДЗ ПФ направляется полный состав гетерогенной группы БВС: БВС КН, БВС ПН, БВС ЭН, БВС МН и БВС ЭвН, на участок зоны ЧС с превышением ПДЗ ПФ направляются беспилотные воздушные суда БВС ПН, БВС ЭН; БВС МН и БВС ЭвН направляются на этот участок при обнаружении там пострадавших; участок зоны ЧС с возможным превышением ПДЗ ПФ осматривает БВС ПН, и при необходимости туда направляют БВС ЭН; БВС МН и БВС ЭвН (см. фигуру 9).
Минимизация уровней ПФ осуществляется БВС ЭН. Для этого он осуществляет облет заданного участка зоны ЧС и с использованием газоанализатора, а так же инфракрасной и видеокамеры обнаруживает источники ПФ: разгерметизированные технологические емкости и трубопроводы с химическими веществами, разливы химических веществ, очаги горения, разрушенные электроустановки, трансформаторные подстанции и пр. И при обнаружении источников ПФ принимает меры к устранению или минимизации уровней ПФ: обнаружение течи и ее герметизация в емкостях или трубопроводах, нейтрализация разливов, тушение очагов пожара, обесточивание источников электрического тока и пр.
Оказание пострадавшим ЭМП осуществляется БВС МН. Это БВС оборудовано ММН, портативным рентген-аппаратом, дефибриллятором, портативным регистратором электрокардиосигналов, а так же медицинскими приспособлениями и лекарственными препаратами для оказания ЭМП пострадавшему. А так же средствами для проведения медицинской маркировки пострадавших.
Информацию, необходимую для заключения о транспортабельности пострадавшего оператор МТМК получает в ходе обследования пострадавшего с помощью видеокамеры и рентген-аппарата, работающего на основе технологии обратно рассеянного рентгеновского излучения (ОРРИ) (см. фигуру 10) и размещенного на борту БВС МН, а также принимая во внимание результаты оценки ФСО пострадавшего.
ОРРИ - технология, при которой рентгеновские лучи от источника не проходят сквозь объект, а отражаются от него и формируют изображение на приемнике, расположенном с той же стороны, что и источник. Так как объект не надо просвечивать насквозь, возможно использовать излучение с интенсивностью на несколько порядков ниже, чем при проникающем излучении.
Также не требуется создания громоздких конструкций - источник излучения и приемники могут располагаться в одном корпусе. Кроме того, технология ОРРИ позволяет эффективно обнаруживать вещества с малыми атомными номерами (предметы, содержащие такие элементы как углерод, водород, кислород и азот). К числу веществ с малой атомной массой относятся ткани тела человека. Эти объекты на изображениях высвечиваются ярко и четко, что позволяет легко идентифицировать закрытые переломы, повреждения внутренних органов, являющиеся противопоказаниями для активных действий.
Использование технологии ОРРИ при оказании ЭМП позволяет:
- получать изображения внутренних органов пострадавшего;
- размещать источник и приемники излучения на БВС с одной стороны от пострадавшего и создавать системы, осуществляющие рентген-диагностику в условиях ЧС;
- создавать за счет малой мощности излучения устройств, использующих данную технологию, системы, безопасные для пострадавших.
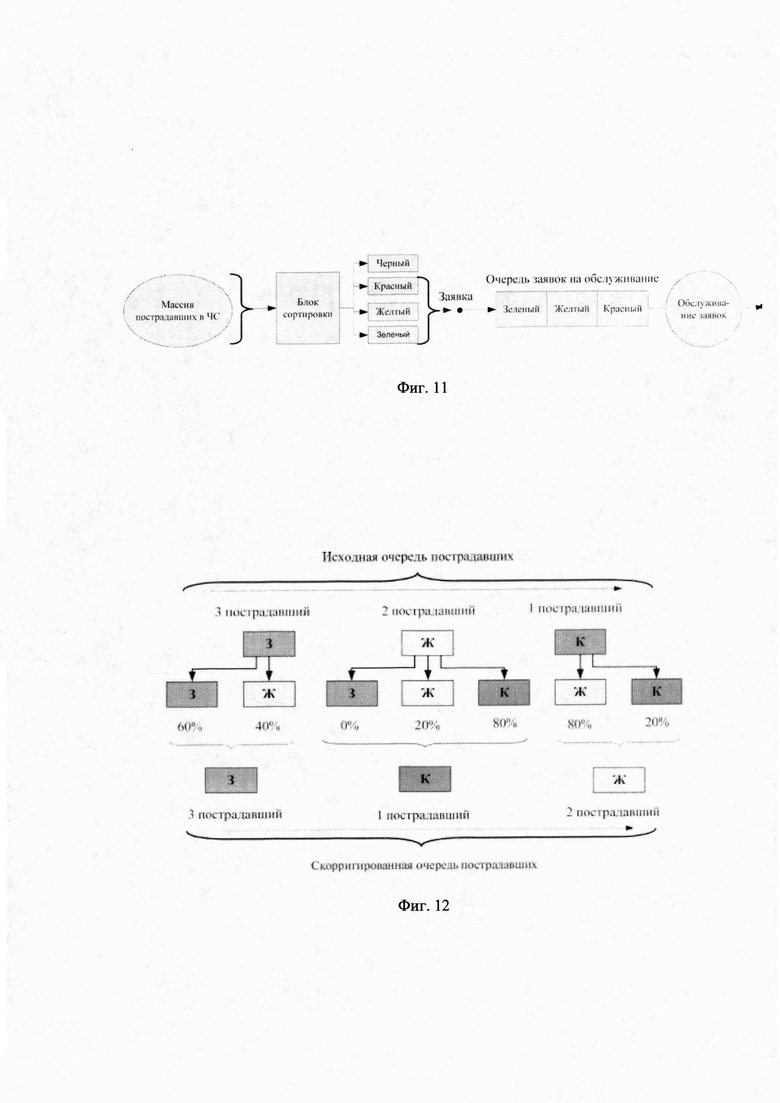
По результатам оказания ЭМП проводится МС пострадавших для повышения эффективности работы бригады МТМК: группе «погибших» соответствует черный цвет, «легкораненых» - зеленый, «неотложных» - желтый и «экстренных» - красный. В рамках данного способа возможна маркировка пострадавших краской путем распыления оборудованием, размещенным на БВС МН. С использованием этого оборудования БВС МН имеет возможность собрать больше информации о ФСО пострадавшего, а оператор и бригада МТМК оказать более квалифицированно ЭМП.
Корректировка очередности оказания ЭМП пострадавшим в ЧС производится на основе информации, поступающей от портативных кардиоанализаторов, размещенных на телах пострадавших и данных, представляемых СШПР. Решение о смене «цвета» и соответственно очередности оказания ЭМП принимает оператор МТМК на основе анализа данных о ФСО пострадавших. Алгоритм корректировки очередности оказания ЭМП пострадавшим заключается в следующем.
Сначала определяются исходные ФСО пострадавших. Исходя из этого, оказывается ЭМП. По итогам ее оказания рассматриваются возможные варианты изменения ФСО, учитывая позитивные и негативные тенденции. После чего «цветовой» статус пострадавшего может быть изменен и изменена очередность оказания ЭМП и эвакуации.
На фигуре 11 [12] приведена очередность сортировки пострадавших на оказание ЭМП в ходе ЧС, осуществляемая в прототипе. Особенностью этого процесса является использование только одного многофункционального БВС и работа с оператором МТМК по одной линии связи, когда заявки на обслуживание пострадавших направляются по мере обнаружения пострадавших, без учета их «цветового» статуса - кого раньше нашли тем и занялись. Кроме того, данная схема не предусматривает мониторинг состояния пострадавшего до момента подхода к нему бригады МТМК. В некоторых случаях это может быть уже не нужным: пострадавший либо погиб, либо пришел в себя и самостоятельно выбрался из зоны ЧС, а бригада МТМК потратила время на путь к нему, оставив без внимания других пострадавших, нуждающихся в ЭМП.
На фигуре 12 [12] показана как, по мнению авторов предполагаемого изобретения, может измениться ФСО пострадавших после помощи им БВС МН и, соответственно, как может быть проведена корректировка очередности оказания ЭМП по результатам мониторинга ФСО пострадавших БВС ПН.
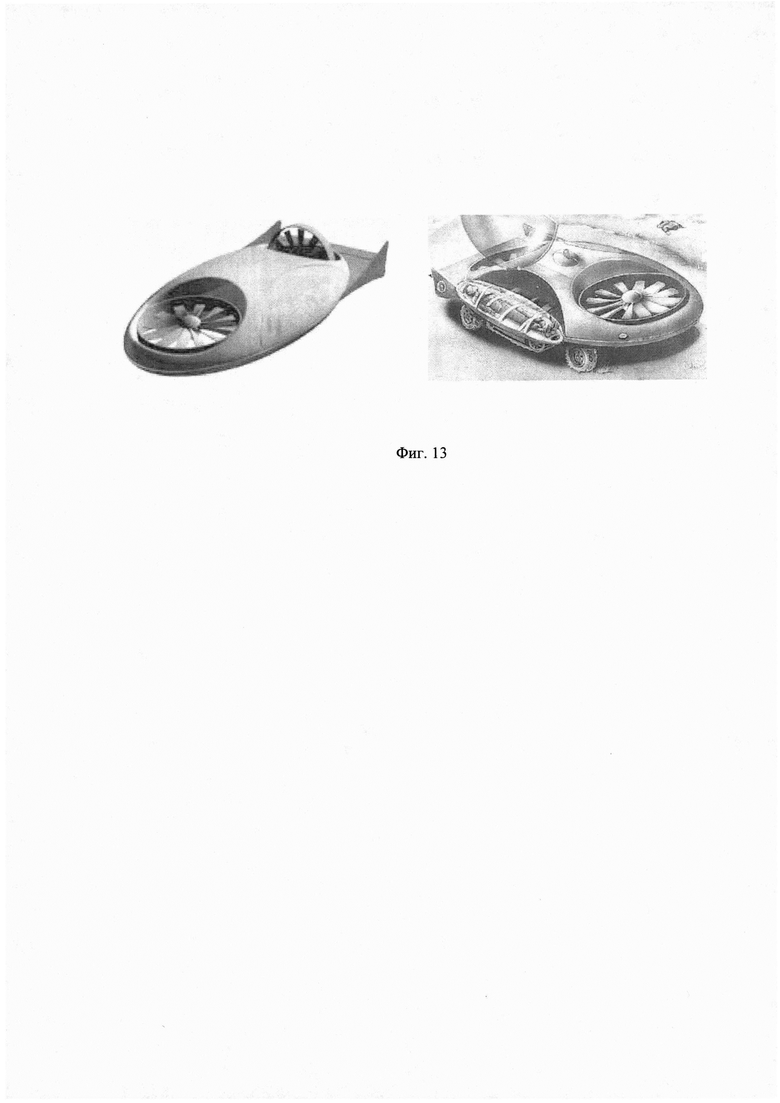
Эвакуация транспортабельных пострадавших и их жизнеобеспечение БВС ЭвН посредством капсулы реанимации. БВС ЭвН предназначен для эвакуации пострадавших из зоны ЧС. Отличительной особенностью данного БВС является наличие капсулы реанимации, оснащенной оборудованием, необходимым для поддержания жизненно-важных функций организма пострадавшего (см. фиг 13) [13].
Очередность эвакуации пострадавших определяется в соответствии с результатами проведенной МС с учетом корректировки очередности оказания ЭМП.
В рамках данного способа рассматривается возможность как самостоятельного размещения пострадавшего в капсуле, так и при помощи других лиц. Оказывать помощь пострадавшему «забраться» в капсулу до прибытия бригады МТМК могут и легкораненые пострадавшие (при координации их действий БВС ПН). Эвакуация и доставка пострадавших ЧС к месту госпитализации еще до прибытия бригады МТМК в заданную точку экономит время, что повышает шансы пострадавшего на своевременное оказание ему ЭМП.
Оператор МТМК оценивает транспортабельность эвакуируемого пострадавшего по рентген-снимку сделанному с БВС МН перед его размещением с помощью «легкораненых» в капсуле реанимации БВС ЭвН, поскольку действия неспециалистов могут навредить пострадавшему.
Кроме того, БВС ЭвН может переносить достаточно тяжелое медицинское оборудование, а вместе с ним и членов бригады МТМК непосредственно к пострадавшему, особенно в случае местонахождения последнего в местах, куда затруднен пеший проход.
На фигуре 7 приведена предлагаемая схема полной реализации алгоритма проведения ПСР.
На фигуре 8 приведено деление зоны ЧС на участки в зависимости от наличия и значений ПФ.
На фигуре 9 приведен рисунок, иллюстрирующий работу гетерогенной группы БВС
На фигуре 10 приведена схема работы установки ОРРИ
На фигуре 11 приведена схема сортировки пострадавших в ходе ЧС, осуществляемая в прототипе.
На фигуре 12 приведена схема сортировки пострадавших в ходе ЧС с учетом корректировки очереди на оказание ЭМП.
На фигуре 13 приведена модель БВС для эвакуации и жизнеобеспечения пострадавших.
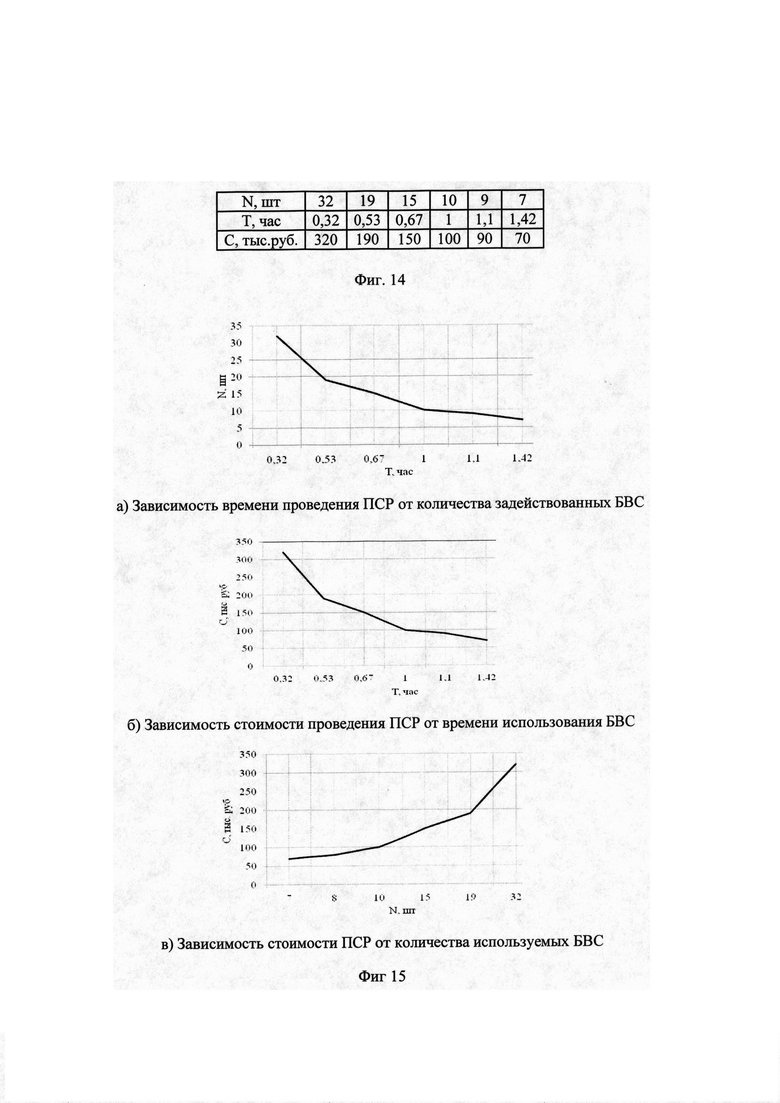
На фигуре 14 приведены результаты расчета количества, времени и стоимости используемых в ПСО БВС.
На фигуре 15 приведены: а) зависимость времени проведения ПСР от количества задействованных БВС; б) зависимость стоимости проведения ПСР от времени использования БВС; в) зависимость стоимости ПСР от количества используемых БВС.
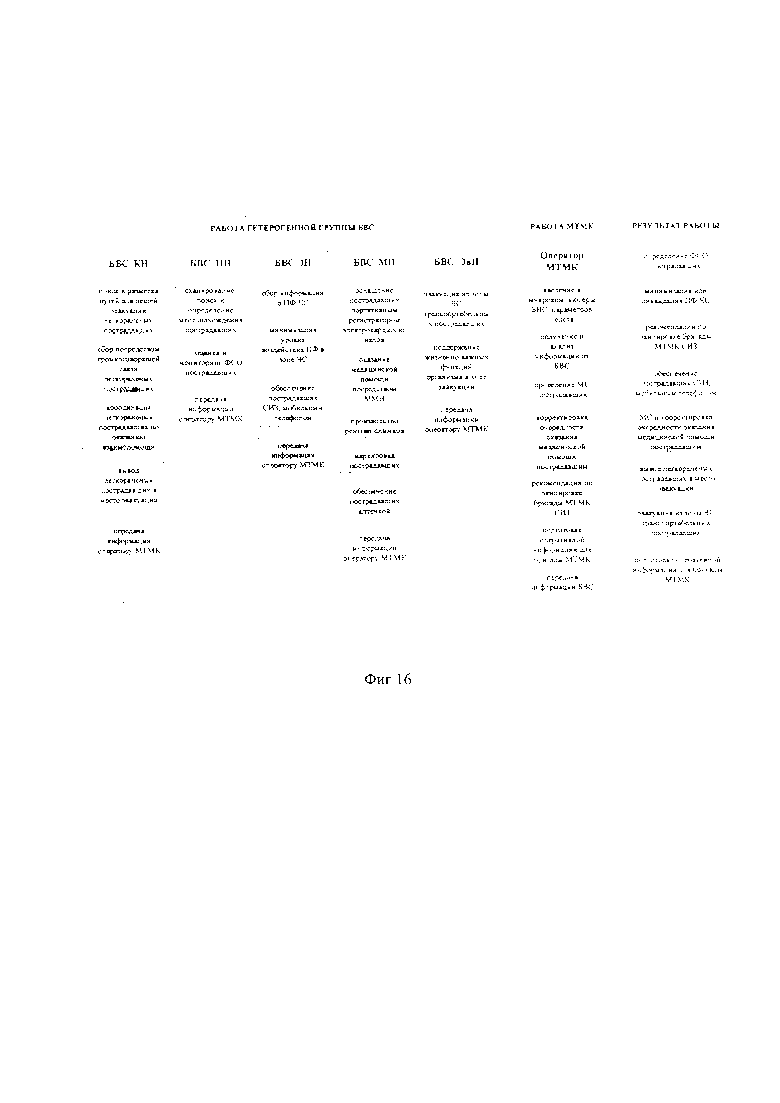
На фигуре 16 приведена схема работы гетерогенной группы БВС.
Техническим результатом изобретения является уменьшение времени на поиск пострадавших, повышение качества оказания ЭМП и, как следствие, уменьшение потерь и осложнений у пострадавших в ходе ЧС.
Указанный результат достигается тем, что в способе проведения ПСР сообщение о ЧС поступают в ЕДДС по прямым каналам и линиям связи. При классификации сложившейся ситуации как чрезвычайной, ЕДДС населенного пункта поручает проведение работ в зоне ЧС соответствующим службам, и они выдвигаются в зону ЧС.
Выдвигаясь в зону ЧС, оператор МТМК проводит предварительную оценку зоны ЧС. Предварительная оценка проводится на основании анализа имеющихся карт местности и прогнозов, проведенных заблаговременно для данного объекта в соответствии требованиями и по методикам, приведенным в [11]. Оценивается, что могло произойти на объекте, в каких масштабах, каковы прогнозируемые значения ПФ, возможная площадь зоны ЧС, рельеф местности, наличие зон жилой и промышленной застройки, зеленых насаждений, водных объектов и пр. и, исходя из этого, вся зона ЧС делится на участки: участок зоны ЧС с максимальным превышением ПДЗ ПФ, участок зоны ЧС с превышением ПДЗ ПФ, участок зоны ЧС с возможным превышением ПДЗ ПФ (см. фигуру 8).
Причем участок зоны ЧС с максимальным превышением ПДЗ ПФ характеризуется кратным (в несколько раз) превышением ПДЗ ПФ вследствие чего, без предварительной разведки и уточнения прогнозируемых значений ПФ БВС ЭН и СИЗ туда не допускается персонал бригады МТМК. Граница этого участка устанавливается в пределах радиуса
R1≤n⋅ПДЗ.
Участок зоны ЧС с превышением ПДЗ ПФ ограничивается радиусом
ПДЗ≤R2<n⋅ПДЗ.
Участок зоны ЧС с возможным превышением ПДЗ ПФ ограничивается радиусом R3 и характеризуется значениями ПФ сопоставимых или меньших ПДЗ и там могут свободно находиться бригады МТМК и подготавливаемые к отправке в медицинские учреждения, эвакуированные из зоны ЧС пострадавшие. Все эти объекты размещаются на участке зоны ЧС с возможным превышением ПДЗ ПФ после его обследования БВС ПН и БВС ЭН.
Таким образом, предварительная оценка зоны ЧС дает исходную информацию о фронте работ, и позволяет сформировать и распределить гетерогенную группу БВС по участкам зоны ЧС с учетом перечисленных особенностей.
Формирование гетерогенной группы БВС начинают с определения минимального количества БВС для проведения всех видов работ в зоне ЧС [14] исходя из следующих условий. Из анализа прототипа известно, что с привлечением одного БВС выполнение ПСО осуществляется за τ час. Для сокращения ее продолжительности авторы предполагаемого изобретения предлагают использовать N БВС со стоимостью работы одного БВС с руб./час.
Критериями эффективности использования БВС при выполнении ПСР являются расходы на эксплуатацию и обслуживание используемых БВС и общее время работы БВС, определенные как:

Исходя из этого необходимо найти минимальное количество N применяемых в ПСР БВС, удовлетворяющее критериям эффективности.
Из вида функций (1) следует, что с ростом значения N величина С возрастает, а значения Т убывают. Это указывает на противоречивость используемых критериев эффективности и, как следствие, отсутствие единственного оптимального решения этой задачи.
Компромиссные решения предлагается формировать в виде множества ее решений, оптимальных по Парето [14] по формуле:

где α - параметр свертки критериев эффективности, определяемый по формуле:

где α*-(0,α*)∈(0,1).
Сформируем сетку значений параметра свертки:

Последовательно подставляя в формулу (2) значения αn вычислим паретооптимальные значения Ni, оптимального числа БВС, 
Исключая из совокупности значений NA, N2, …, Nn повторяющиеся значения, получим m вариантов  потребного числа БВС.
потребного числа БВС.
Полученные значения подставляются в формулы (1) для вычисления вариантов затрат и времени выполнения операции.
На основе этих результатов формируется оптимальное по Парето множество решений задачи:

которое выдается лицу, принимающему решения для анализа и выбора оптимального количества БВС, исходя из конкретных условий проведения ПСР.
Пример. Определить минимальное количество БВС для поиска, оказания ЭМП и эвакуации пострадавших, а так же минимизации значений ПФ при проведении ПСР в зоне ЧС, если работы нужно провести в течение 1 часа (τ=1 час), средняя стоимость использования одного БВС с=10 тыс.руб./час.
Проведя расчет по формулам (1)-(4) получаем значения и зависимости, приведенные на фигурах 14, 15.
Таким образом, ориентируясь на оптимальное время для поиска и оказания ЭМП пострадавшим, задачу выполнит гетерогенная группа из десяти БВС.
Распределение БВС по участкам зоны ЧС проводят с учетом их функционального назначения. На участок зоны ЧС с максимальным превышением ПДЗ ПФ направляется полный состав гетерогенной группы БВС: БВС КН, БВС ПН, БВС ЭН, БВС МН и БВС ЭвН, на участок зоны ЧС с превышением ПДЗ ПФ направляются БВС ПН и БВС ЭН. БВС МН и БВС ЭвН направляются на этот участок при обнаружении там пострадавших; участок зоны ЧС с возможным превышением ПДЗ ПФ осматривает БВС ПН, и при необходимости туда направляют БВС ЭН; БВС МН и БВС ЭвН.
Работа гетерогенной группы БВС осуществляется следующим образом. Перед запуском группы в микрокомпьютеры БВС оператор МТМК вводит параметры полета и запускает группу. По пути следования каждый БВС детектирует и передает видеоинформацию о состоянии объектов в зоне ЧС. Кроме видеосъемки БВС ЭН проводит анализ состояния ОС по пути следования, выявление ПФ, их локализацию и уровни. На основе этой информации оператор МТМК уточняет данные прогнозирования и имеет возможность корректировать границы участков зоны ЧС.
По пути следования на участок зоны ЧС с максимальным превышением ПДЗ ПФ БВС КН осуществляет поиск и разметку путей для последующей эвакуации легкораненых пострадавших, способных самостоятельно передвигаться. Для этого в светлое время суток он устанавливает флажки яркого цвета, в темное время суток - фонари. Используя громкоговорящую связь, БВС КН собирает легкораненых пострадавших способных передвигаться самостоятельно, координирует их для оказания взаимопомощи, организует их движение к месту эвакуации. Проводит обмен информацией с оператором МТМК.
Пересекая границу зоны ЧС на участке с возможным превышением ПФ остается одно БВС ПН и выполняет свою программу заключающуюся, как показано на фигуре 16, в сканировании, поиске и определении местонахождения пострадавших, оценки их ФСО, передаче информации о пострадавших оператору МТМК. При наличии пострадавших на этот участок оператор МТМК направляет БВС МН и БВС ЭвН. Если пострадавших не обнаружено БВС ПН по команде оператора МТМК либо возвращается на базу, либо присоединяется к группе и продолжает совместную работу. Критерием является время нахождения БВС ПН в воздухе.
На участке зоны ЧС с превышением ПДЗ ПФ начинают работу БВС ПН и БВС ЭН. БВС ПН работает по ранее описанной схеме. БВС ЭН собирает информацию о ПФ ЧС, принимает меры для минимизации уровней воздействия ПФ ЧС. Для выполнения этой работы он обеспечен портативным газоанализатором, дозиметром, инфракрасной видеокамерой. А так же распылителем способным, в зависимости от происхождения ПФ, наносить герметизирующий состав для заделывания течей в технологических емкостях и трубопроводах, нейтрализующий состав для свободно распространяющих химических веществ, изолирующий состав для воздействия на очаги возгорания. Кроме этого, оснащение БВС ЭН электромеханическим манипулятором со специальным инструментом позволяет обесточивать токоведущие части оборудования. После обмена информацией с оператором МТМК БВС ЭН приступает к обеспечению пострадавших СИЗ и мобильным телефоном для связи с бригадой МТМК.
На участок зоны ЧС с максимальным превышением пребывает гетерогенная группа БВС в следующем составе: БВС КН, БВС ПН, БВС ЭН, БВС МН и БВС ЭвН.
На этом этапе уже собран большой объем информации об источниках и значениях ПФ зоны ЧС, наличии и распределении пострадавших, их ФСО. Вся эта информация передается оператору МТМК, он на основе анализа информации проводит МС, результаты которой в форме очередности оказания пострадавшим ЭМП передает БВС МН. БВС МН, получив от оператора МТМК порядок действий, подлетает к пострадавшему и оснащает его портативным регистратором электрокардиосигналов, по показаниям которого оператор МТМК может судить об изменении ФСО пострадавшего и, используя ММН, БВС МН, если необходимо, провести дефибрилляцию, инъекцию лекарственных препаратов, обеспечить аптечкой, наложить жгут, повязку, шину. Для определения возможности эвакуации пострадавшего с использованием БВС ЭвН делает рентген-снимки и на основании этого провести маркировку пострадавшего.
Следуя указаниям оператора МТМК в соответствии с результатами МС и корректировки оказания ЭМП, БВС ЭвН подлетает к пострадавшим, назначенным для эвакуации, и они либо самостоятельно, либо с помощью других лиц размещаются в капсуле реанимации БВС ЭвН, где автоматически подключаются к системам жизнеобеспечения и следуют к месту эвакуации.
Таким образом осуществляется распределение функциональных обязанностей и работа гетерогенной группы БВС.
Сравнение известного (см. фигуру 1) и предлагаемого способа (см. фигуру 7) показывает, что предлагаемый способ проведения поисково-спасательных работ позволяет устранить недостатки известного способа и проводить поисково-спасательные работы в полном объеме, в соответствии с требованиями МЧС РФ, реализуя этапы: разведка, поиск пострадавших, минимизация уровней поражающих факторов, оказание медицинской помощи и эвакуация пострадавших с использованием беспилотных воздушных судов.
Предлагаемый способ позволяет минимизировать время проведения поисково-спасательных работ за счет использования гетерогенной группы беспилотных воздушных судов различного функционального назначения, использовать больше поискового, медицинского и вспомогательного оборудования с рациональным его распределением по беспилотным воздушным судам и обоснованно оптимизировать их количество.
Таким образом, предлагаемый способ может быть использован при проведении поисково-спасательных работ для их оптимизации и повышения эффективности за счет использования гетерогенной группы беспилотных воздушных судов различного функционального назначения и рационального размещения оборудования.
Введенные действия позволяют полностью реализовать алгоритм проведения поисково-спасательных работ используемый в МЧС РФ. Этот алгоритм включает следующие обязательные этапы: разведку зоны чрезвычайной ситуации, поиск пострадавших и определение их места нахождения, минимизацию уровней воздействия поражающих факторов чрезвычайной ситуации, оказание пострадавшим медицинской помощи, эвакуацию транспортабельных пострадавших.
Эти особенности являются отличительными признаками предлагаемого способа проведении поисково-спасательных работ.
Новые свойства предлагаемого способа проведения поисково-спасательных работ позволяют более полномасштабно, с экономией времени и применением большего количества оборудования проводить поисково-спасательные работы с использованием гетерогенной группы беспилотных воздушных судов различного функционального назначения. При этом сохраняются достоинства известного способа проведения поисково-спасательных работ.
Список источников информации
1. ГОСТ Р 56122 - 2014. Воздушный транспорт. Беспилотные авиационные системы. Общие требования.
2. Беспальчук, Д.Ю. БПЛА Военно-медицинского назначения с применением роевого взаимодействия / Д.Ю. Беспальчук // Sci-article: Информационные технологии, Электротехника, Медицина, Техника, Электроника. 2016. №35: [Электронный ресурс]. URL:http://sci-article.ru/stat.php?i=1468930326
3. Способ проведения аварийно-спасательных работ в море: 2421370 Рос. Федерация: МПК В63С 9/00 (2006.01), В64С 9/02 (2006.01), G01S 5/18 (2006.01), А62 В 99/00 (2009.01) / Штрамбранд В.И. и др. патентообладатель и заявитель ФГУП "Росморпорт" - №: 2008147590/11; заявл. 03.12.2008; опубл. 20.06.2011 Бюл. №17.
4. Гражданская защита: Энциклопедия в 4-х томах. Т. I (А-И) (издание третье, переработанное и дополненное); под общей ред. В.А. Пучкова / МЧС России. М.: ФГБУ ВНИИ ГОЧС (ФЦ), 2015. 666 с. илл.
5. Бодин, О.Н. Концепция оказания экстренной медицинской помощи пострадавшим в чрезвычайных ситуациях / О.Н. Бодин [и др.] // Вестн. Росс. воен.-мед. акад. - 2015. - №3 (51). - С. 143-147.
6. Способ проведения поисково-спасательных работ: 2622505 Рос. Федерация: МПК А62В 99/00 (2009.01) В64С 39/02 (2006.01) / Богданов П.В. патентообладатель и заявитель Федеральное государственное бюджетное образовательное учреждение высшего образования «Ивановский государственный химико-технологический университет» (ИГХТУ) - №: 2016120811; заявл. 26.05.2016; опубл. 16.06.2017 Бюл. №17.
7. Ильясов Ф.Ш., Радары для обнаружения людей за оптически непрозрачными преградами / Ф.Ш. Ильясов // Технологии гражданской безопасности, том 7. - 2009. - №3-4 (21-22). С. 86-90.
8. Он-лайн газоанализаторы URL: http://www.tpklion.spb.ru/category.php?cat_id=2&subcat_id=124?utm_source=yandex&utm_medium=cpc&utm_campaign=gazoanalisator_poisk|26804971&utm_content=9495265389|premium|3|device-desktop|gr-75|ob-1&utm_term=газоанализатор%20углекислого%20газа&utm_network=search&utm_placement=none
9. ЛИДАР для БЛА URL: http://art-geo.ru/catalog/airscanner_bpla/vozdushnye-lazernye-skanery-dlya-bpla/riegl-vux1-series
10. Жуков, С.В. Избранные лекции по медицине катастроф / С.В. Жуков, Е.Г. Королюк. - Тверь: Изд-во ТверГУ, 2007. - 120 с.
11. Корсаков Г.А. Расчет зон чрезвычайных ситуаций / ГА. Корсаков. - Санкт-Петербург: Изд-во СПГЛТА, 997. - 112 с.
12. Бодин О.Н., Казаков В.А., Полосин В.Г., Рахматуллов Ф.К., Сергеенков А.С. Оптимизация оказания медицинской помощи в условиях чрезвычайной ситуации / О.Н. Бодин [и др.] // Вестн. Росс. воен.-мед. акад. - 2014. - №2 (46). - С. 202-206.
13. Е.А. Солдатов, С.В. Кульнев, В.А. Швец, В.Д. Бигунец Перспективы использования беспилотных летательных аппаратов в интересах медицинской службы в ходе ликвидации последствий чрезвычайных ситуаций / ЕА. Солдатов [и др.] // Медико-биологические и социально-психологические проблемы безопасности в чрезвычайных ситуациях. - 2010. - №2 - С. 50-55.
14. Моисеев B.C. Основы теории эффективного применения беспилотных летательных аппаратов: монография. - Казань: Редакционно-издательский центр «Школа», 2015. 444 с. (Серия «Современная прикладная математика и информатика»).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА НАВИГАЦИИ ОБЪЕКТОВ В ЗОНЕ ЧРЕЗВЫЧАЙНОЙ СИТУАЦИИ | 2020 |
|
RU2756032C1 |
| СПОСОБ ПРОВЕДЕНИЯ ПОИСКОВО-СПАСАТЕЛЬНЫХ РАБОТ | 2016 |
|
RU2622505C1 |
| Способ проведения спасательных работ и беспилотное воздушное судно для осуществления способа | 2020 |
|
RU2762052C1 |
| СПОСОБ ДОВРАЧЕБНОЙ ПОМОЩИ | 1994 |
|
RU2107488C1 |
| САНИТАРНЫЙ ТРАНСПОРТ "АКАДЕМИК ЛИТВИНОВ" | 2002 |
|
RU2254115C2 |
| Способ проведения поисково-спасательных работ | 2018 |
|
RU2698893C1 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 2004 |
|
RU2252161C1 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 2005 |
|
RU2299819C1 |
| СПАСАТЕЛЬНЫЙ МОДУЛЬ | 2014 |
|
RU2580592C2 |
| СПОСОБ ОЦЕНКИ ЧРЕЗВЫЧАЙНОЙ СИТУАЦИИ ДЛЯ РАЗВЕРТЫВАНИЯ ПУНКТОВ ВРЕМЕННОГО РАЗМЕЩЕНИЯ НАСЕЛЕНИЯ, ПОСТРАДАВШЕГО ОТ АВАРИЙ, КАТАСТРОФ И СТИХИЙНЫХ БЕДСТВИЙ, И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537878C2 |

Предполагаемое изобретение относится к способам проведения поисково-спасательных работ и может быть использовано при проведении работ в зоне чрезвычайной ситуации. Способ включает этапы: разведка, поиск пострадавших, минимизация уровней поражающих факторов, оказание медицинской помощи и эвакуация пострадавших с использованием гетерогенной группы беспилотных воздушных судов различного функционального назначения. Этапы способа реализуются за счет предварительной оценки зоны чрезвычайной ситуации, формирования гетерогенной группы из беспилотных воздушных судов координирующего, поискового, экологического, медицинского и эвакуационного назначений, распределения гетерогенной группы беспилотных воздушных судов по участкам зоны чрезвычайной ситуации минимизации уровней воздействия поражающих факторов с помощью беспилотного воздушного судна экологического назначения, оказания пострадавшим медицинской помощи манипулятором беспилотного воздушного судна медицинского назначения, корректировки очередности оказания медицинской помощи пострадавшим, эвакуации транспортабельных пострадавших и их жизнеобеспечения беспилотным воздушным судном эвакуационного назначения посредством капсулы реанимации. Предлагаемый способ повышает эффективность оказания экстренной медицинской помощи пострадавшим за счет сокращения времени на поиск пострадавших за счет использования гетерогенной группы беспилотных воздушных судов различного функционального назначения, позволяет использовать больше поискового, медицинского и вспомогательного оборудования с рациональным его распределением по беспилотным воздушным судам и обоснованно оптимизировать их количество. 16 ил.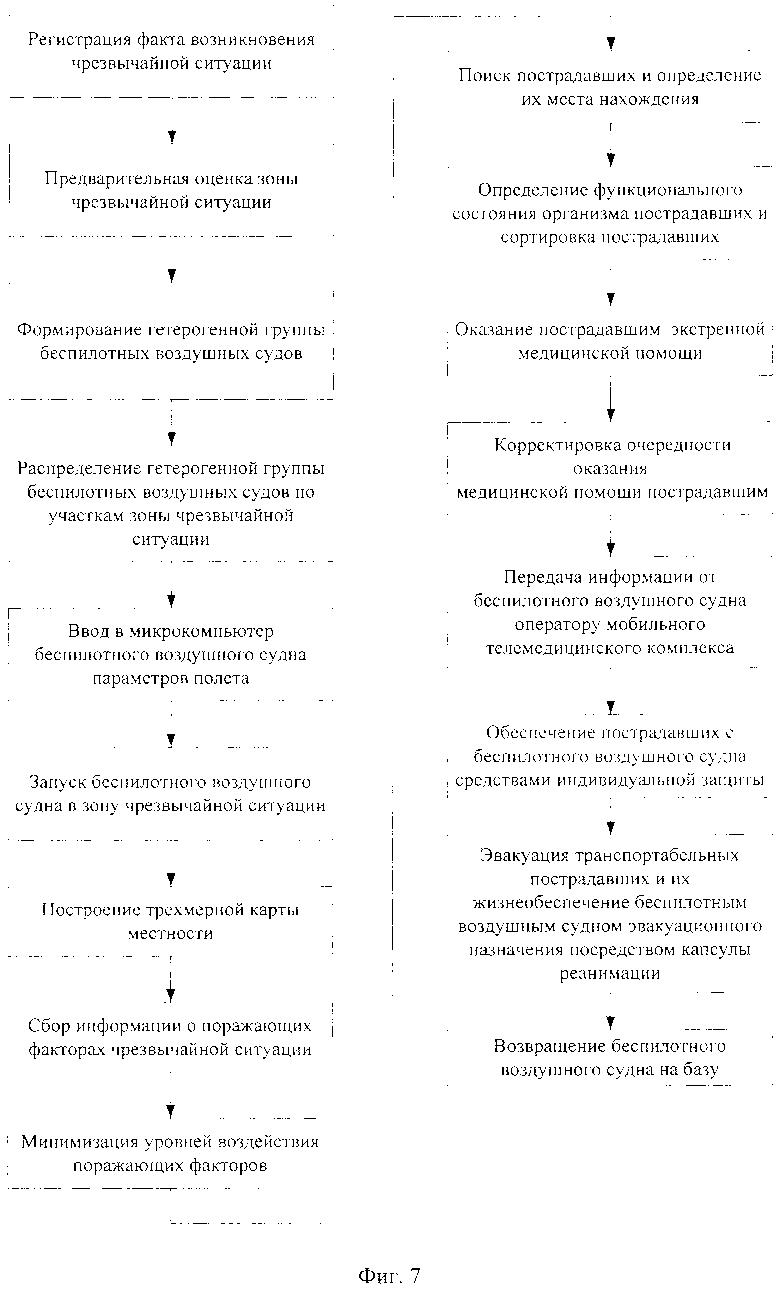
Способ проведения поисково-спасательных работ, заключающийся в том, что осуществляют:
- ввод оператором мобильного телемедицинского комплекса в микрокомпьютер беспилотного воздушного судна координат границ зоны чрезвычайной ситуации, высоты полета, координат точки начала сканирования, траектории и шага сканирования;
- запуск беспилотного воздушного судна в зону чрезвычайной ситуации;
- разведку беспилотным воздушным судном зоны чрезвычайной ситуации путем:
- построения трехмерной карты зоны чрезвычайной ситуации;
- сбора информации о поражающих факторах чрезвычайной ситуации;
- поиск пострадавших и определение места нахождения пострадавших путем сканирования территории зоны чрезвычайной ситуации сверхширокополосным радаром;
- определение функционального состояния организма пострадавших с помощью сверхширокополосного радара и сортировку пострадавших;
- передачу информации от беспилотного воздушного судна оператору мобильного телемедицинского комплекса;
- обеспечение пострадавших средствами индивидуальной защиты, мобильным телефоном и аптечкой;
- возвращение беспилотного воздушного судна, отличающийся тем, что дополнительно осуществляют:
- предварительную оценку зоны чрезвычайной ситуации путем:
- анализа карты местности зоны чрезвычайной ситуации;
- разделения зоны чрезвычайной ситуации на участки: участок зоны чрезвычайной ситуации с максимальным превышением предельно допустимого значения поражающего фактора, участок зоны чрезвычайной ситуации с превышением предельно допустимого значения поражающего фактора, участок зоны чрезвычайной ситуации с возможным превышением предельно допустимого значения поражающего фактора;
- выбора и определения координат мест эвакуации и места прибытия бригады мобильного телемедицинского комплекса;
- формирование гетерогенной группы из беспилотных воздушных судов координирующего, поискового, экологического, медицинского и эвакуационного назначений;
- распределение гетерогенной группы беспилотных воздушных судов по участкам зоны чрезвычайной ситуации путем направления на участок зоны чрезвычайной ситуации:
- с максимальным превышением предельно допустимого значения поражающего фактора беспилотных воздушных судов координирующего, поискового, экологического, медицинского и эвакуационного назначений;
- с превышением предельно допустимого значения поражающего фактора беспилотных воздушных судов поискового и экологического назначений;
- с возможным превышением предельно допустимого значения поражающего фактора беспилотного воздушного судна поискового назначения, при этом беспилотные воздушные суда выполняют следующие функции:
- беспилотное воздушное судно координирующего назначения: ведение команды беспилотных воздушных судов в назначенный участок зоны чрезвычайной ситуации, сбор посредством системы громкоговорящей связи легкораненых пострадавших, координация легкораненых пострадавших по оказанию взаимопомощи, поиск путей для пешей эвакуации легкораненых пострадавших, вывод легкораненых пострадавших в место эвакуации, встреча бригады мобильного телемедицинского комплекса и ее сопровождение к пострадавшим, передача информации оператору мобильного телемедицинского комплекса;
- беспилотное воздушное судно поискового назначения: сканирование, поиск и определение местонахождения пострадавших, оценка и мониторинг функционального состояния организма пострадавших, мониторинг участка зоны чрезвычайной ситуации;
- беспилотное воздушное судно экологического назначения: сбор информации о поражающих факторах в зоне чрезвычайной ситуации, минимизация уровня воздействия поражающих факторов в зоне чрезвычайной ситуации, обеспечение пострадавших средствами индивидуальной защиты, мобильным телефоном, мониторинг участка зоны чрезвычайной ситуации;
- беспилотное воздушное судно медицинского назначения: обеспечение пострадавших аптечкой, оказание медицинской помощи посредством манипулятора медицинского назначения, производство рентген-снимков, оснащение пострадавших портативным регистратором электрокардиосигналов, маркировка пострадавших;
- беспилотное воздушное судно эвакуационного назначения: эвакуация из зоны чрезвычайной ситуации транспортабельных пострадавших, поддержание жизненно важных функций организма пострадавших в ходе эвакуации;
- минимизацию уровней воздействия поражающих факторов с помощью беспилотного воздушного судна экологического назначения путем:
- тушения пожара;
- обесточивания токоведущих частей оборудования;
- устранения пробоин в технологических емкостях;
- нейтрализации свободно распространяющих химических веществ;
- оказание пострадавшим медицинской помощи манипулятором беспилотного воздушного судна медицинского назначения путем:
- производства рентген-снимков;
- наложения жгута, повязки, шины;
- оснащения пострадавших портативным регистратором электрокардиосигналов;
- проведения дефибрилляции;
- инъекции лекарственных препаратов;
- маркировки пострадавших;
- корректировку очередности оказания медицинской помощи пострадавшим;
- эвакуацию транспортабельных пострадавших и их жизнеобеспечение беспилотным воздушным судном эвакуационного назначения посредством капсулы реанимации.
| СПОСОБ ПРОВЕДЕНИЯ ПОИСКОВО-СПАСАТЕЛЬНЫХ РАБОТ | 2016 |
|
RU2622505C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС БЕСПИЛОТНОГО ВОЗДУШНОГО МОНИТОРИНГА | 2015 |
|
RU2612754C1 |
| СПОСОБ И КОМПЛЕКС СРЕДСТВ ОБНАРУЖЕНИЯ ЧРЕЗВЫЧАЙНОЙ СИТУАЦИИ И ЛИКВИДАЦИИ ЕЕ ПОСЛЕДСТВИЙ | 2004 |
|
RU2350368C2 |
| US 9915945 B2, 13.03.2018. | |||

