Изобретение относится к области авиационной техники, в частности, к способам управления посадкой беспилотных летательных аппаратов [B64C 25/00, G05D 1/00, В64С 19/00, В64С 29/00, В64С 39/02].
Из уровня техники известен СПОСОБ ПРОВЕДЕНИЯ ПОИСКОВО-СПАСАТЕЛЬНЫХ РАБОТ [RU2698893, опубл.: 30.08.2019], заключающийся в запуске по меньшей мере одного возвращаемого беспилотного летательного аппарата (БПЛА) для выхода в район бедствия, наведении БПЛА, оснащенного системой спутниковой навигации, например ГЛОНАС/GPS, телевизионной камерой, с полезным грузом на место нахождения объекта поиска и доставки упомянутого полезного груза к объекту поиска, при этом полетом БПЛА управляют с помощью радиокомандной линии управления, посредством анализа телевизионного изображения взаимного расположения БПЛА, несущего полезный груз, и объекта поиска, а после доставки полезного груза, по командам с командного пункта, осуществляют возврат указанного БПЛА, а также упреждающе по команде на пульт оператора или по возвращении указанного БПЛА, другим летательным аппаратом или повторным рейсом вернувшегося БПЛА, осуществляют доставку, с возможностью посадки, объекту поиска дополнительного полезного груза, включающего, например, воду, провиант, одежду, средства индивидуальной защиты, радиосвязи с поисковым отрядом и медикаменты для оказания первой медицинской помощи, отличающийся тем, что обеспечивают оснащение потенциального объекта поиска перед его выходом на маршрут блоком аварийной связи, формирующим сигнал тревоги путем нажатия объектом поиска тревожной кнопки с последующими передачей голосового сообщения, информацией об отсутствии признака движения, наличии изменений показателей пульса и давления, характерных для эректильной или торпидной фаз травматического шока, отсутствии сообщений по каналу связи от модуля аварийной связи в течение заданного времени; наличии сигналов от блока акселерометров, характерных падению объекта поиска с критической высоты, передачи координат и состояния объекта поиска на наземный пункт управления или БПЛА посредством различных радиосетей, например GSM - сети, спутниковой связи, БПЛА-ретранслятора вертолетного типа для расширения зоны радиосвязи, перед запуском БПЛА автоматически рассчитывают оптимальный маршрут в точку местоположения объекта поиска, определяют координаты центра зоны допоиска, размер зоны допоиска, способ организации поиска, после запуска БПЛА корректируют его маршрут, после чего БПЛА производит поисковую деятельность видео- и инфракрасными бортовыми системами в зоне допоиска, а после обнаружения объекта поиска и анализа его состояния оператором последний принимает решение на запуск грузового летательного аппарата вертолетного типа с целью доставки средств спасания, в частности упомянутого дополнительного груза, и/или спасателей, а также сообщает в службы спасания.
Недостатком аналога является отсутствие возможности автоматической посадки БПЛА, обусловленной используемым алгоритмом управления и конструктивными особенностями БПЛА.
Наиболее близким по технической сущности является СПОСОБ ТОЧНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА [WO2017160192A1, опубл.:17.03.2017], характеризующийся тем, способ точной посадки беспилотного летательного аппарата (БПЛА), включающий в себя этапы, на которых: получают временную последовательность кадров, закодированную в битовый поток, получаемую с оптической камеры, установленной на БПЛА, и содержащую данные, по меньшей мере, об одной оптической метке, расположенной в точке посадки БПЛА; определяют, по меньшей мере, два угла смещения при помощи алгоритмов компьютерного зрения; получают данные, по меньшей мере, о двух углах наклона БПЛА и высоте БПЛА; обрабатывают полученные данные, по меньшей мере, о двух углах наклона БПЛА и высоте БПЛА при помощи, по меньшей мере, одного рекурсивного фильтра; определяют вектор смещения БПЛА; формируют и направляют сигналы управления при помощи пропорционально-интегрально-дифференцирующего (ПИД) регулятора на полетный контроллер БПЛА; корректируют траекторию посадки БПЛА.
Основной технической проблемой прототипа является низкая вероятность безаварийной посадки беспилотного летательного аппарата при потере связи оптической камеры БПЛА с оптической меткой или смещения оптической метки, а также низкая точность посадки БПЛА на автономную (необслуживаемую) наземную базовую станцию.
Задачей изобретения является устранение недостатков прототипа.
Техническим результатом изобретения является повышение точности безаварийной посадки БПЛА.
Указанный технический результат достигается за счет того, что способ безаварийной посадки беспилотного летательного аппарата, характеризующийся тем, что получают временную последовательность кадров об оптической метке с оптической камеры, определяют углы смещения, получают данные об углах наклона и высоте БПЛА, обрабатывают полученные данные, определяют вектор смещения БПЛА, направляют сигналы управления на полетный контроллер и корректируют траекторию посадки БПЛА, отличающийся тем, временную последовательность кадров с оптической камеры получают с информацией о, как минимум, одном фрагменте оптической метки, для определения, по меньшей мере, двух векторов смещения по горизонтали с учетом смещений оптической камеры относительно оптической метки, фрагмента относительно оптической метки и размеров оптической метки или ее фрагмента, направляют сигналы управления на полетный контроллер для выполнения сближения БПЛА с оптической меткой, при потере связи оптической камеры с оптической меткой или ее фрагментом, направляют сигналы управления на полетный контроллер для остановки БПЛА, осуществления движение по обратной траектории до момента восстановления визуальной связи оптической камеры с оптической меткой или ее фрагментом.
В частности, на фрагменты оптической метки наносят информацию о расположении фрагмента относительно центра оптической метки.
В частности, расчет векторов смещения по горизонтали производят по формулам:
qx = (rx/li * Li * k) + xi
qy = (ry/li * Li * k) + yi ,
где rx, ry – относительная величина, характеризующая смещение центра оптической камеры 3 относительно центра оптической метки (или ее фрагмента i) в кадре, li – относительный размер стороны оптической метки (или ее фрагмента i) в кадре, L – абсолютный размер оптической метки (или ее фрагмента i), xi, yi – абсолютное смещение центра фрагмента i относительно центра оптической метки, k – коэффициент, характеризующий оптическую камеру.
В частности, коэффициент k определяют в ходе калибровки оптической камеры.
Краткое описание чертежей.
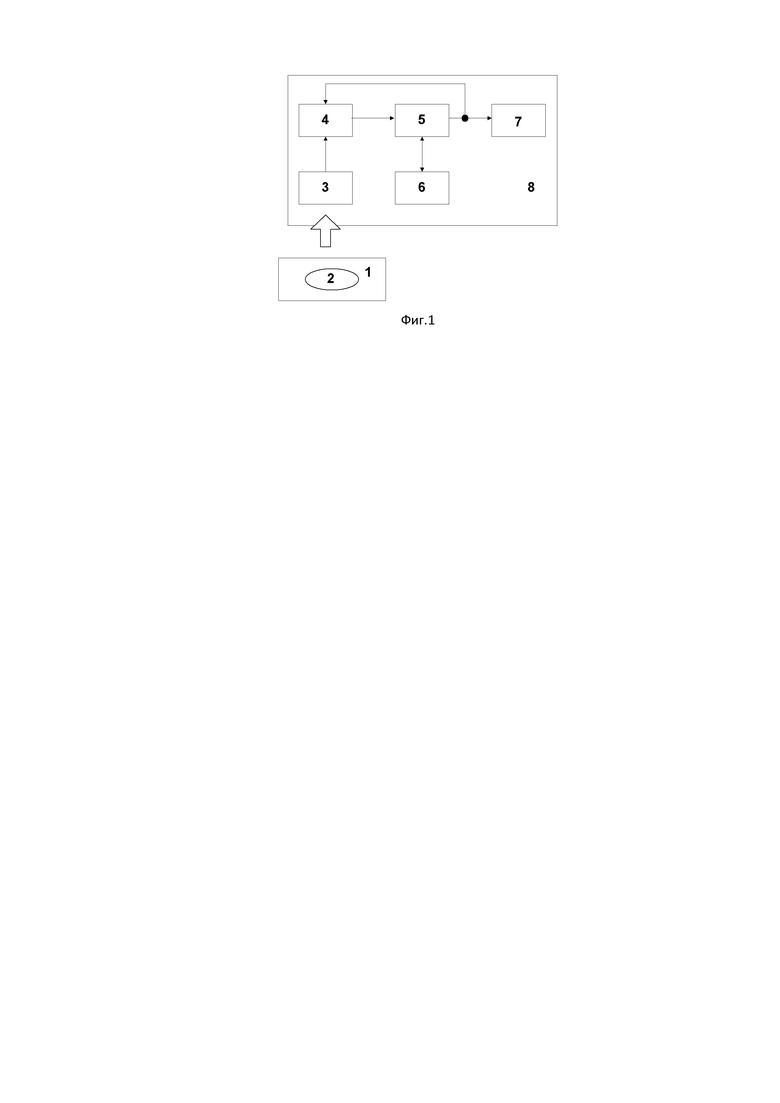
На фиг.1 схематично показан способ безаварийной посадки БПЛА.
На фигуре обозначено: 1 – наземная базовая станция, 2 – оптическая метка, 3 – оптическая камера, 4 – бортовой компьютер, 5 – полетный контроллер, 6 – навигационный контроллер, 7 – силовая установка, 8 – БПЛА.
Осуществление изобретения.
Беспилотный летательный аппарат (БПЛА), искусственный мобильный объект (летательный аппарат), как правило, многоразового использования, не имеющий на борту экипажа (человека-пилота) и способный самостоятельно целенаправленно перемещаться в воздухе для выполнения различных функций в автономном режиме (с помощью собственной управляющей программы) или посредством дистанционного управления (осуществляемого человеком-оператором со стационарного или мобильного пульта управления). Различают БПЛА автоматические, работающие в соответствии с заложенными в их бортовой компьютер программами (самолёты-разведчики и др.), и дистанционно пилотируемые летательные аппараты (ДПЛА), которые также относятся к классу БПЛА.
Фильтр Калмана - эффективный рекурсивный фильтр, оценивающий вектор состояния динамической системы, используя ряд неполных и зашумленных измерений.
OpenCV (англ. Open Source Computer Vision Library, библиотека компьютерного зрения с открытым исходным кодом) - библиотека алгоритмов компьютерного зрения, обработки изображений и численных алгоритмов общего назначения с открытым кодом.
Оптическая метка 2 выполнена в виде контрастного изображения преимущественно прямоугольной формы и содержит множество индивидуальных, строго ориентированных фрагментов, нанесенных как по внутреннему периметру, так и по центру оптической метки 2, содержащих в себе графическую информацию расположения фрагмента на оптической метке 2.
Способ безаварийной посадки беспилотного летательного аппарата реализуют следующим образом.
Для обеспечения точной посадки БПЛА 8 на наземной базовой станции 1 наносят оптическую метку 2, выполненную контрастными цветами и содержащую в себе множество ориентированных индивидуальных фрагментов, нанесенных как по контуру оптической метки 2, так и в ее центре.
В бортовом компьютере 4 БПЛА 8 при помощи алгоритмов компьютерного зрения обрабатывают временную последовательность кадров, закодированную в битовый поток, с оптической камеры 3, установленной на гиростабилизированной платформе БПЛА 8, содержащую данные об оптической метке 2 или ее фрагменте, расположенной в точке планируемой посадки на платформе наземной базовой станции 1 для определения, по меньшей мере, двух направлений смещения по горизонтали.
Расчет векторов смещения по горизонтали производят по формулам:
qx = (rx/li * Li * k) + xi
qy = (ry/li * Li * k) + yi ,
где rx, ry – относительная величина, характеризующая смещение центра оптической камеры 3 относительно центра оптической метки 2 (или ее фрагмента i) в кадре, li – относительный размер стороны оптической метки 2 (или ее фрагмента i) в кадре, L – абсолютный размер оптической метки 2 (или ее фрагмента i), xi, yi – абсолютное смещение центра фрагмента i относительно центра оптической метки 2, k – коэффициент, характеризующий оптическую камеру 3 (определяют в ходе калибровки).
Обрабатывают полученные данные о координатах БПЛА 8 от навигационного 6 и полетного контроллера 5 о высоте БПЛА 8, направлении смещения и в автоматическом режиме с частотой не менее пороговой для корректировки траектории и обеспечения заданной точности посадки БПЛА 8 направляют сигналы управления при помощи пропорционально-интегрально-дифференцирующего (ПИД) регулятора (на фигурах не показан) на полетный контроллер 5 БПЛА 8.
Полетный контроллер 5 получает предварительные данные о текущих координатах и ориентации по азимуту от навигационного контроллера 6. После остановки БПЛА 8 на высоте, достаточной для захвата изображения оптической метки 2, в бортовом компьютере 4 приступают к выполнению процедуры оценки высоты и смещения БПЛА 8 от текущего местоположения. Данные о смещении и высоте рассчитывают в бортовом компьютере 4 БПЛА путем обработки фильтрами библиотек компьютерного зрения (например, OpenCV) временной последовательности кадров, закодированной в битовый поток получаемой с оптической камеры 3, установленной на БПЛА 8 и содержащей данные об оптической метке 2 или ее фрагменте, расположенной в точке планируемой посадки на платформе наземной базовой станции 1.
Бортовым компьютером 4 БПЛА обрабатывают полученные данные о смещении по горизонтали и высоте, и направляют обработанные данные в полетный контроллер 5 в котором обрабатывают их с помощью встроенного в него, по меньшей мере, одного рекурсивного фильтра (например, при помощи одной из разновидностей фильтра Калмана) и направляет сигналы управления при помощи пропорционально-интегрально-дифференцирующего (ПИД) регулятора на полетный контроллер 5 в автоматическом режиме с частотой не менее пороговой.
При зависании БПЛА 8 над оптической меткой 2 на высоте, оптическая камера 3 регистрирует изображение, причем, сигналы управления, направляемые от бортового компьютера 4 на полетный контроллер 5, зависят только от углов смещения и высоты, а вектор смещения задает направление движения в плоскости платформы наземной базовой станции 1.
При потере оптической метки 2 или ее фрагмента, с помощью сигналов управления от бортового компьютера 4 останавливают и возвращают БПЛА 8 по обратной траектории движения до момента, пока оптическая камера 3 вновь не зафиксирует изображение оптической метки 2 или ее фрагмента, после чего повторяют алгоритм.
Технический результат - повышение точности безаварийной посадки БПЛА, достигается за счет того, что в бортовом компьютере 4 обрабатывают временную последовательность кадров, закодированную в битовый поток, содержащую данные об оптической метке 2 или ее фрагменте, расположенной в точке планируемой посадки на платформе наземной базовой станции 1 для определения, по меньшей мере, двух направлений смещения по горизонтали с учетом величин смещений оптической камеры относительно оптической метки (rx, ry), фрагмента относительно оптической метки (xi, yi) и размеров оптической метки или ее фрагмента (l, L), а при потере связи оптической камеры 3 с оптической меткой 2 или ее фрагментом, направляют сигналы управления на полетный контроллер 5 для остановки БПЛА 8, осуществляют движение БПЛА 8 по обратной траектории до момента восстановления визуальной связи оптической камеры 3 с оптической меткой 2 или ее фрагментом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТОЧНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2615587C9 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| Автономный беспилотный летательный аппарат для доставки малокалиберных боеприпасов до цели | 2023 |
|
RU2826931C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДРОНОМ | 2018 |
|
RU2714977C1 |
| СПОСОБ ПОСАДКИ БВС САМОЛЕТНОГО ТИПА НА ВЗЛЕТНО-ПОСАДОЧНУЮ ПОЛОСУ С ИСПОЛЬЗОВАНИЕМ ОПТИЧЕСКИХ ПРИБОРОВ РАЗЛИЧНОГО ДИАПАЗОНА | 2019 |
|
RU2724908C1 |
| Способ автономного приземления беспилотного летательного аппарата на мобильную платформу | 2023 |
|
RU2821253C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
| Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека | 2019 |
|
RU2723201C1 |
| БПЛА И СПОСОБ ВЫПОЛНЕНИЯ АЭРОФОТОСЪЕМКИ | 2022 |
|
RU2798604C1 |
Изобретение относится к области авиационной техники, в частности к способам управления посадкой беспилотных летательных аппаратов. Способ безаварийной посадки беспилотного летательного аппарата, характеризующийся тем, что получают временную последовательность кадров об оптической метке с оптической камеры, определяют углы смещения, получают данные об углах наклона и высоте БПЛА, обрабатывают полученные данные, определяют вектор смещения БПЛА, направляют сигналы управления на полетный контроллер и корректируют траекторию посадки БПЛА. При этом временную последовательность кадров с оптической камеры получают с информацией о как минимум одном фрагменте оптической метки, для определения по меньшей мере двух векторов смещения по горизонтали с учетом смещений оптической камеры относительно оптической метки, фрагмента относительно оптической метки и размеров оптической метки или ее фрагмента. Направляют сигналы управления на полетный контроллер для выполнения сближения БПЛА с оптической меткой при потере связи оптической камеры с оптической меткой или ее фрагментом. Направляют сигналы управления на полетный контроллер для остановки БПЛА, осуществления движения по обратной траектории до момента восстановления визуальной связи оптической камеры с оптической меткой или ее фрагментом. Техническим результатом изобретения является повышение точности безаварийной посадки БПЛА. 3 з.п. ф-лы, 1 ил.
1. Способ безаварийной посадки беспилотного летательного аппарата, характеризующийся тем, что получают временную последовательность кадров об оптической метке с оптической камеры, определяют углы смещения, получают данные об углах наклона и высоте БПЛА, обрабатывают полученные данные, определяют вектор смещения БПЛА, направляют сигналы управления на полетный контроллер и корректируют траекторию посадки БПЛА, отличающийся тем, временную последовательность кадров с оптической камеры получают с информацией о как минимум одном фрагменте оптической метки, для определения по меньшей мере двух векторов смещения по горизонтали с учетом смещений оптической камеры относительно оптической метки, фрагмента относительно оптической метки и размеров оптической метки или ее фрагмента, направляют сигналы управления на полетный контроллер для выполнения сближения БПЛА с оптической меткой, при потере связи оптической камеры с оптической меткой или ее фрагментом направляют сигналы управления на полетный контроллер для остановки БПЛА, осуществления движения по обратной траектории до момента восстановления визуальной связи оптической камеры с оптической меткой или ее фрагментом.
2. Способ по п.1, отличающийся тем, что на фрагменты оптической метки наносят информацию о расположении фрагмента относительно центра оптической метки.
3. Способ по п.1, отличающийся тем, что расчет векторов смещения по горизонтали производят по формулам:
qx = (rx/li * Li * k) + xi,
qy = (ry/li * Li * k) + yi ,
где rx, ry – относительная величина, характеризующая смещение центра оптической камеры 3 относительно центра оптической метки (или ее фрагмента i) в кадре, li – относительный размер стороны оптической метки (или ее фрагмента i) в кадре, L – абсолютный размер оптической метки (или ее фрагмента i), xi, yi – абсолютное смещение центра фрагмента i относительно центра оптической метки, k – коэффициент, характеризующий оптическую камеру.
4. Способ по п.1, отличающийся тем, что коэффициент k определяют в ходе калибровки оптической камеры.
| СПОСОБ ТОЧНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2615587C9 |
| EP 1901153 A1, 19.03.2008 | |||
| US 9713982 B2, 25.07.2017 | |||
| WO 2011048597 A1, 28.04.2011 | |||
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1990 |
|
RU2018785C1 |

