Изобретение относится к сельскому хозяйству, а именно к способам дифференцированного внесения средств защиты растений и комплексам для его осуществления.
Известен авиационный опрыскиватель для дифференцированного внесения жидких удобрений, включающий штангу, баки, гидронасос с приводом от ветряка, и дозатором с расходомером, связанными с электронным блоком управления (см. Патент РФ №47173, А01М 7/00, 2011 г.).
Недостатком данного изобретения является возможность внесения только жидких удобрений, что снижает эффективность использования авиационного опрыскивателя.
Известен способ одновременного дифференцированного внесения сыпучих агро-химикатов и сева, включающий в себя операции по формированию заданных доз агро-химикатов и внесению их путем автоматического регулирования расхода рабочих органов. Для формирования заданных доз производят периодический отбор проб на малых тестовых площадках, расположенных рядом с основным полем, на которых возделывается одна и та же культура, как и на основном поле. Объемные дозаторы выполнены в виде шаговых двигателей с внешним ротором в виде зубчатых венцов для дозированной подачи агро-химиката, снизу которых установлены тройники, на выходе которых установлены весовые дозаторы, выполненные в виде поворотных управляемых весочувствительных заслонок, а боковые входы тройников соединены с воздухопроводами, оборудованными запорными электромагнитными клапанами (см. Патент РФ №2643258, А01С 17/00, 2018 г.)
Недостатком является осуществление двух процессов одновременно: внесение сыпучих агро-химикатов и сева, что предполагает разовое применение при посеве сельскохозяйственных культур, при затратах временного ресурса на определение дозировки агро-химикатов на малых тестовых площадках, что снижает эффективность данного способа.
Известен комплекс летательных аппаратов для внесения жидких средств химизации в точном земледелии, содержащий базовый летательный аппарат вертолетного типа, снабженный пилотажно-навигационным оборудованием, приемником сигналов глобальной спутниковой навигационной системы, бортовым компьютером со встроенной системой распределенного контроля связи и управления беспилотными летательными аппаратами и модулем программного обеспечения дифференцированной обработки сельскохозяйственного поля. Блоками автоматического управления расходом, распределения и подачей жидких средств химизации. Баком для жидких средств химизации, гибкими связями с беспилотными летательными аппаратами, с закрепленными на них электро-кабелями и трубопроводами, соединенными с базовым вертолетом. Группу из n-го количества беспилотных летательных аппаратов вертолетного типа, каждый их которых снабжен приемником сигналов глобальной навигационной спутниковой системы, бортовым компьютером, системой автоматического управления полетом на заданных режимах, модулем программного обеспечения дифференцированного внесения жидких средств химизации и модулем диспергирования в виде штанги с форсунками, причем, в группе нечетное их количество, по крайней мере не менее 3, беспилотных летательных аппаратов, центр масс каждого из которых совмещен с вершинами углов одного или нескольких равнобедренных треугольников, образующих в полете одно или несколько взаимосвязанных треугольных звеньев из беспилотных летательных аппаратов, находящихся в одной горизонтальной плоскости, параллельной обрабатываемому полю, отстоящей от обрабатываемой поверхности поля на расстоянии, равном рабочей высоте обработки сельскохозяйственных культур, расстояние между соседними беспилотными летательными аппаратами равно длине штанги с форсунками каждого беспилотного летательного аппарата. При этом все штанги с форсункам выполнены одинаковой длины, каждая штанга с форсунками соединена с соответствующими модулями дозирования, снабженными интерфейсной связью с бортовым компьютером каждого беспилотного летательного аппарата, модули дозирования соединены гибкой трубопроводной связью с соответствующим распределительным клапаном блока автоматического управления расходом, распределением и подачей жидких средств химизации базового летательного аппарата, содержащего фронтальную штангу длиной, не превышающей диаметра несущего винта базового летательного аппарата, и автоматические лебедки, количество которых равно числу гибких связей с беспилотными летательными аппаратами, каждый модуль программного обеспечения дифференцированного внесения жидких средств химизации каждого беспилотного летательного аппарата функционально связан с модулем программного обеспечения для дифференцированной обработки всего сельскохозяйственного поля, оба модуля интегрированы в систему распределенного контроля, связи и управления беспилотными летательными аппаратами, а каждый модуль диспергирования жидких средств химизации на каждом беспилотном летальном аппарате связан с модулем дозирования (см. патент РФ №2617163, кл. B64D 1/18, А01С 23/04, 2016 г.)
Недостатками данного изобретения являются низкая эффективность использования за счет сноса препарата на соседние посевы, необходимость большой площади для взлета летательных аппаратов.
Технической задачей заявляемого изобретения является повышение эффективности использования сыпучих удобрений, средств биологической или химической защиты, обеспечение дифференцированного и сверхточного внесения их на растительный покров.
Сравнение заявляемого изобретения не только с прототипом, но с другими техническими решениями, показывает, что наличие GPS-компаса, обеспечивающего привязку к ГЕО-данным, позволяет вносить средства защиты растений точечно и сверхточно, следовательно, избежать перерасхода сыпучего средства и снизить финансовые расходы на него.
При этом удается избежать повреждения посевов, обработать те участки, куда доступ традиционной сельскохозяйственной технике закрыт по причине труднодоступности (например, из-за высокой влажности почвы), в кратчайшие сроки ликвидировать локальные очаги заражения культур болезнями или вредителями, расходуя минимальное количество препаратов и средств защиты растений, что свидетельствует о высокой эффективности, при этом подстроенный резистор позволяет изменить дозировку вносимых сыпучих средств защиты, и соответствует критерию «изобретательский уровень».
Изобретение поясняется чертежом.
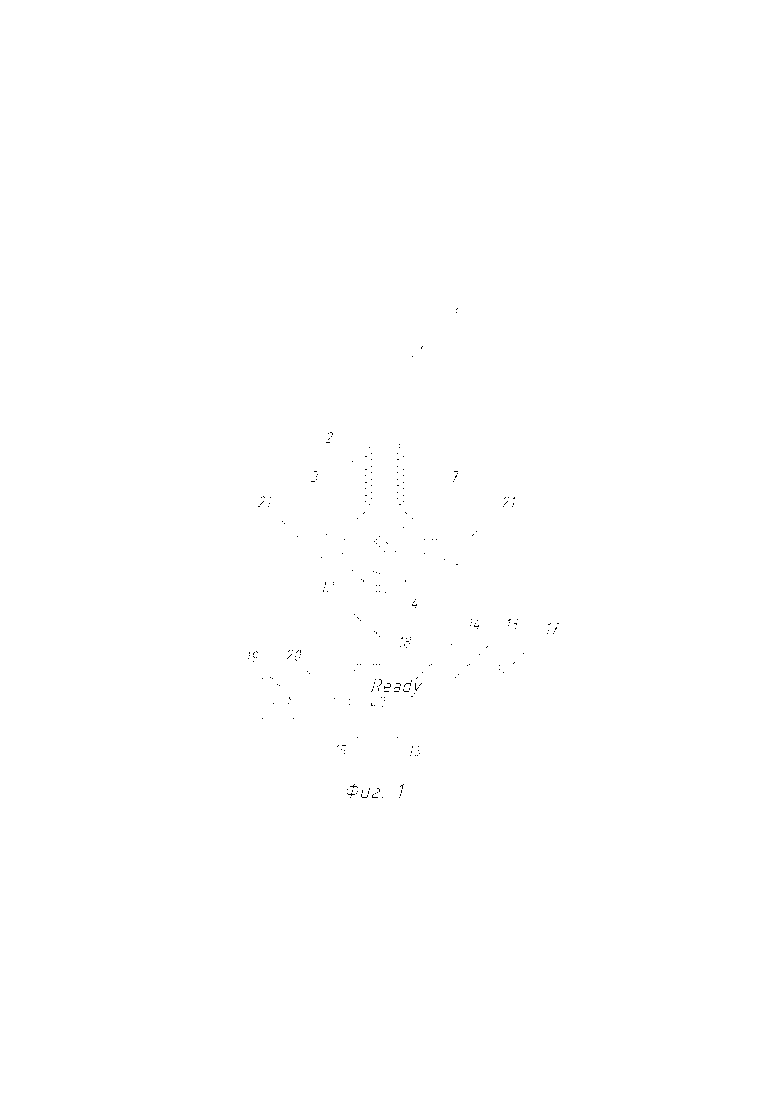
На фиг. 1 представлена принципиальная схема.
На фиг. 2 - разрез по осевой линии фронтальной плоскости.
На фиг. 3 - разрез по осевой линии горизонтальной плоскости.
Комплекс включает в себя емкость для сыпучих средств защиты растений 1, дозатор 2, связанный посредством гибкой гофрированной трубы 3 с емкостью для сыпучих средств защиты растений 1. Дозатор 2 выполнен в виде барабана с отверстием для сброса средств защиты растений 4. Внутри барабана расположены электродвигатель 5, редуктор 6, вал редуктора 7, дозирующее колесо 8, с расположенными на нем неодимовыми магнитами 9 и датчиком Холла 10 в корпусе дозирующего колеса. Между корпусом дозатора и дозирующим колесом 8 установлена мягкая прокладка 11, предохраняющая от избыточного поступления сыпучих средств защиты растений. Посредством кабелей 12 электродвигатель 5 подключен к блоку управления 13. На внешней стороне блока управления находятся LED-дисплей 14, переменный резистор 15 и подстроенный резистор 16. В блоке управления 13 установлен пропорционально-интегрально-дифференцирующий регулятор 17, который подключен к датчику Холла 10, посредством кабелей 18. Комплекс, установленный на беспилотном летательном аппарате, снабжен GPS-компасом 19, связанным с блоком управления 13 кабелем 20; 21 - крепление комплекса к беспилотному летательному аппарату. Дозирующее колесо выполнено в виде крыльчатки, в которой объем между лопастями равен 0,2 грамма, то есть составляет одну дозу.
Изобретение реализуется следующим образом.
В приложении, разработанном специально для контроля полетов беспилотных летательных аппаратов, определяют границы поля и координаты точек для сброса сыпучих средств защиты растений. Комплекс устанавливают на беспилотном летательном аппарате, заполняют емкость 1 сыпучими средствами защиты растений и запускают летательный аппарат.
Блок управления 13, основываясь на информации GPS-компаса 19 о местоположении летательного аппарата, в точках сброса сыпучих средств защиты растений, запускает электродвигатель 5 дозатора 2, который проворачивает вал редуктора 6, приводящий во вращение дозирующее колесо 8 дозатора. В это время из емкости 1 сыпучие средства защиты растений через гофрированную трубу 3 под собственным весом поступают в барабан дозатора и попадают на дозирующее колесо 8. Переменный резистор 15 блока управления 13 изменяет количество оборотов дозирующего колеса в диапазоне от 40 до 60 оборотов в минуту. Подстроечный резистор 16 устанавливает расход смеси в граммах на километр. Что позволяет изменять дозировку.
Пропорционально-интегрально-дифференцирующий регулятор 17 на основе показаний датчика Холла 10 позволяет контролировать процесс сброса смеси. Что в совокупности, позволяет добиться оптимального и сверхточного распределения сыпучих средств защиты растений на растительном покрове, предотвращая перерасход последних. Осуществляется сброс дозы сыпучих средств защиты растений на сельскохозяйственные культуры.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ внесения средств биологической защиты растений в виде энтомофагов и устройство дозирования для его осуществления | 2024 |
|
RU2830613C1 |
| Способ ультрамалообъемного опрыскивания сельскохозяйственных растений и устройство для его осуществления с использованием беспилотных авиационных средств вертолетного типа | 2019 |
|
RU2730640C1 |
| Комплекс летательных аппаратов для внесения жидких средств химизации в точном земледелии | 2016 |
|
RU2617163C1 |
| Комплекс летательных аппаратов для дифференцированного внесения жидких средств химизации | 2016 |
|
RU2622617C1 |
| Воздухоплавательный роботизированный аппарат для мониторинга и внесения средств защиты растений, удобрений в точном земледелии | 2019 |
|
RU2703198C1 |
| Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии | 2020 |
|
RU2769411C1 |
| Модульный многофункциональный транспортно-технологический комплекс | 2022 |
|
RU2785589C1 |
| Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека | 2019 |
|
RU2723201C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Беспилотный вертолет для внесения пестицидов, удобрений и других агрохимикатов в точном земледелии | 2021 |
|
RU2754790C1 |

Группа изобретений относится к области сельскохозяйственного машиностроения. Способ внесения сыпучих средств защиты растений предусматривает определение границ поля, точек сброса сыпучих средств защиты растений, заполнение емкости сыпучими средствами защиты растений и запуск беспилотного летательного аппарата. Основываясь на информации GPS-комплекса о местоположении летательного аппарата, в точках сброса сыпучих средств защиты растений блок управления запускает электродвигатель дозатора, в который через гофрированную трубу под собственным весом поступают средства защиты растений и попадают на дозирующее колесо. Переменный резистор определяет количество оборотов дозирующего колеса, лежащих в диапазоне 40-60 об/мин, подстроечный резистор устанавливает расход смеси в г/км. Далее происходит сброс дозы сыпучих средств защиты растений, а пропорционально-интегрально-дифференцирующий регулятор в соответствии с показаниями датчика Холла контролирует процесс сброса смеси, уменьшая или увеличивая их дозировку. Комплекс для внесения сыпучих средств защиты растений содержит емкость для сыпучих средств защиты растений, дозатор, связанный посредством гибкой гофрированной трубы с емкостью для сыпучих средств защиты растений. Дозатор выполнен в виде барабана с отверстием для сброса средств защиты растений. Внутри барабана расположены электродвигатель, редуктор, вал редуктора, дозирующее колесо с расположенными на нем неодимовыми магнитами и датчиком, и выполненным в виде крыльчатки, в которой объем между лопастями равен 0,2 грамма. Между корпусом дозатора и дозирующим колесом установлена мягкая прокладка, предохраняющая от избыточного поступления сыпучих средств защиты растений. Электродвигатель посредством кабелей подключен к блоку управления, на внешней стороне которого находятся LED-дисплей, переменный резистор и подстроечный резистор. В блоке управления установлен пропорционально-интегрально-дифференцирующий регулятор, подключенный к датчику Холла посредством кабелей, что позволяет контролировать процесс сброса смеси. Комплекс выполнен с возможностью установки на беспилотном летательном аппарате, снабженном GPS-компасом, связанным с блоком управления. Обеспечивается повышение эффективности использования сыпучих удобрений, средств биологической или химической защиты, обеспечение дифференцированного и сверхточного внесения их на растительный покров. 2 н.п. ф-лы, 3 ил.
1. Способ внесения сыпучих средств защиты растений, включающий их дозированную подачу, отличающийся тем, что определяют границы поля, точки сброса сыпучих средств защиты растений, заполняют емкость сыпучими средствами защиты растений и запускают беспилотный летательный аппарат, блок управления, основываясь на информации GPS-комплекса о местоположении летательного аппарата, в точках сброса сыпучих средств защиты растений запускает электродвигатель дозатора, в который через гофрированную трубу под собственным весом поступают средства защиты растений и попадают на дозирующее колесо, при этом переменный резистор определяет количество оборотов дозирующего колеса, лежащих в диапазоне 40-60 об/мин, подстроечный резистор устанавливает расход смеси в г/км, происходит сброс дозы сыпучих средств защиты растений, пропорционально-интегрально-дифференцирующий регулятор в соответствии с показаниями датчика Холла контролирует процесс сброса смеси, уменьшая или увеличивая их дозировку.
2. Комплекс для внесения сыпучих средств защиты растений, включающий летательный аппарат, снабженный приемником сигналов глобальной спутниковой навигационной системы, блоком автоматического управления расходов средств защиты растений, отличающийся тем, что комплекс включает в себя емкость для сыпучих средств защиты растений, дозатор, связанный посредством гибкой гофрированной трубы с емкостью для сыпучих средств защиты растений, причем дозатор выполнен в виде барабана с отверстием для сброса средств защиты растений, внутри барабана расположены электродвигатель, редуктор, вал редуктора, дозирующее колесо с расположенными на нем неодимовыми магнитами и датчиком, а между корпусом дозатора и дозирующим колесом установлена мягкая прокладка, предохраняющая от избыточного поступления сыпучих средств защиты растений, причем посредством кабелей электродвигатель подключен к блоку управления, на внешней стороне которого находятся LED-дисплей, переменный резистор и подстроечный резистор, в блоке управления установлен пропорционально-интегрально-дифференцирующий регулятор, подключенный к датчику Холла посредством кабелей, что позволяет контролировать процесс сброса смеси, причем комплекс выполнен с возможностью установки на беспилотный летательный аппарат, снабженный GPS-компасом, связанным с блоком управления, а дозирующее колесо выполнено в виде крыльчатки, в которой объем между лопастями равен 0,2 грамма.
| RU 179386 U1, 11.05.2018 | |||
| KR 101694636 B1, 23.01.2017 | |||
| JP 2008167703 A, 24.07.2008 | |||
| JPH 09271228 A, 21.10.1997. |

