Изобретение относится к сельскому хозяйству, а именно к способам дифференцированного внесения средств защиты растений (СЗР) и техническим средствам для его осуществления.
Известно, что жидкие СЗР обладают более высокой эффективностью в сравнении с твердыми, за счет того, что обеспечивается высокая равномерность внесения и распределения действующего вещества на обрабатываемую поверхность и, как следствие, практически полное его использование вследствие быстрого проникновения к корневой системе и в ткани растений.
Использование жидких СЗР позволяет совмещать химическую обработку культур подкормкой растворами жидких комплексных удобрений (ЖКУ) - как листовой, так и прикорневой.
Кроме того, жидкие СЗР менее зависимы от засушливых условий. Для внесения гранулированных СЗР необходима влага для того, чтобы гранула смогла раствориться и впитаться растениями. Но, в условиях многих агроклиматических зон такой период, когда влага доступна и находится в необходимом количестве, может быть весьма непродолжителен. Поэтому использование жидких СЗР расширяет сроки проведения операций химической защиты растений. Благодаря этому снижается нагрузка на парк техники и гарантированно обеспечивается обработка культуры, уменьшается риск «непопадания в технологические сроки».
В отличие от гранулированных форм, жидкие СЗР быстро всасываются почвой, просачиваются во все ее слои, что также способствует повышению интенсивности и эффективности их воздействия.
Использование жидких СЗР также имеет экономические преимущества, связанные с низкой стоимостью единицы действующего вещества по сравнению с гранулированными формами и выражающиеся в более низких удельных эксплуатационных затратах на гектарную норму внесения материала, а также потенциальное получение более высоких и стабильных урожайности.
Одним из важнейших преимуществ использования жидких форм СЗР является их более высокая технологичность, поскольку внесение растворов СЗР намного равномернее, чем гранулированных удобрений, его можно совмещать с использованием ЖКУ в одной баковой смеси и обеспечить более точную дозировку при распределении по площади. К тому же, жидкие СЗР обладают свободной текучестью, не пылят, не слеживаются, влажность не оказывает на них никакого влияния.
В связи с этим, повышение эффективности использования технических средств и совершенствования технологии внесения жидких средств защиты растений для является весьма перспективным направлением развития агротехнологий.
Известен комплекс летательных аппаратов для внесения жидких средств химизации в точном земледелии (патент РФ № 2617163, опубл. 21.04.2017), содержащий базовый летательный аппарат вертолетного типа, снабженный пилотажно-навигационным оборудованием, приемником сигналов глобальной спутниковой навигационной системы, бортовым компьютером со встроенной системой распределенного контроля связи и управления беспилотными летательными аппаратами и модулем программного обеспечения дифференцированной обработки сельскохозяйственного поля. Блоками автоматического управления расходом, распределения и подачей жидких средств химизации. Баком для жидких средств химизации, гибкими связями с беспилотными летательными аппаратами, с закрепленными на них электро-кабелями и трубопроводами, соединенными с базовым вертолетом. Группу из n-го количества беспилотных летательных аппаратов вертолетного типа, каждый их которых снабжен приемником сигналов глобальной навигационной спутниковой системы, бортовым компьютером, системой автоматического управления полетом на заданных режимах, модулем программного обеспечения дифференцированного внесения жидких средств химизации и модулем диспергирования в виде штанги с форсунками, причем, в группе нечетное их количество, по крайней мере не менее 3-х, беспилотных летательных аппаратов, центр масс каждого из которых совмещен с вершинами углов одного или нескольких равнобедренных треугольников, образующих в полете одно или несколько взаимосвязанных треугольных звеньев из беспилотных летательных аппаратов, находящихся в одной горизонтальной плоскости, параллельной обрабатываемому полю, отстоящей от обрабатываемой поверхности поля на расстоянии, равном рабочей высоте обработки сельскохозяйственных культур, расстояние между соседними беспилотными летательными аппаратами равно длине штанги с форсунками каждого беспилотного летательного аппарата. При этом все штанги с форсункам выполнены одинаковой длины, каждая штанга с форсунками соединена с соответствующими модулями дозирования, снабженными интерфейсной связью с бортовым компьютером каждого беспилотного летательного аппарата, модули дозирования соединены гибкой трубопроводной связью с соответствующим распределительным клапаном блока автоматического управления расходом, распределением и подачей жидких средств химизации базового летательного аппарата, содержащего фронтальную штангу длиной, не превышающей диаметра несущего винта базового летательного аппарата, и автоматические лебедки, количество которых равно числу гибких связей с беспилотными летательными аппаратами, каждый модуль программного обеспечения дифференцированного внесения жидких средств химизации каждого беспилотного летательного аппарата функционально связан с модулем программного обеспечения для дифференцированной обработки всего сельскохозяйственного поля, оба модуля интегрированы в систему распределенного контроля, связи и управления беспилотными летательными аппаратами, а каждый модуль диспергирования жидких средств химизации на каждом беспилотном летальном аппарате связан с модулем дозирования.
Недостатками данного изобретения являются низкая эффективность использования за счет возможного сноса препарата на соседние посевы, необходимость большой площади для взлета и маневрирования данной группировки летательных аппаратов.
Известен летающий высевающий аппарат (патент РФ № 174507, опубл. 1965 г.), включающий беспилотный летательный аппарат вертикального взлета и посадки, семенную камеру, задатчик нормы высева, рабочий орган для перемещения семян, дополнительную семенную камеру, на входе и выходе дополнительной семенной камеры расположены выступы криволинейной формы для перемещения семян, на расстоянии друг от друга соизмеримым со средним удвоенным размером семян, напротив выступа на выходе расположена выемка на расстоянии от выступа соизмеримым со средним размером семян, отличающийся тем, что семенная камера выполнена из съемных секций, расположенных между собой с зазором, а беспилотный летательный аппарат вертикального взлета и посадки снабжен рамой, расположенной в горизонтальной плоскости, причем своей центральной частью соединенной шарнирно и с возможностью фиксации с нижней частью беспилотного летательного аппарата вертикального взлета и посадки, при этом съемные секции соединены с рамой.
В рассматриваемом летающем высевающем аппарате заслуживает внимания концепция размещения съемного технологического модуля по адресному внесению технологического материала (семян) на беспилотном летательном аппарате вертикального взлета и посадки, и перемещения этого аппарата, в ходе реализации технологического процесса, в соответствии с заложенной в блок управления траекторией движения.
Известна конструкция БПЛА, предназначенная для автоматизированного опрыскивания растений. Данное решение представляет собой БПЛА, на борту которого установлена система опрыскивания растений, соединенная с емкостью с жидким химикатом и управляемая подачей жидкости через помпу. БПЛА управляется с помощью вычислительного модуля (процессора), получая команды от пользователя, управляющего БПЛА с помощью беспроводного пульта управления (патент US 20130068892, опубл. 21.03.2013).
В описанной конструкции БПЛА заслуживает внимания сам принцип реализации технологии опрыскивания посевов сельскохозяйственных культур, однако в качестве недостатка данной конструкции можно назвать ее ограниченную функциональность, обусловленную тем, что БПЛА не может осуществлять необходимые работы самостоятельно без участия пользователя, а также использование в конструкции опрыскивателя насоса для подачи технологического материала, что усложняет ее и увеличивает энергозатраты на рабочий процесс.
Наиболее близким по достигаемому эффекту к заявленному способу и устройству для ультрамалообъемного опрыскивания сельскохозяйственных растений является способ внесения сыпучих средств защиты растений и комплекс для его осуществления (патент РФ № 2694502, опубл. 15.07.2019). Способ внесения сыпучих средств защиты растений предусматривает определение границ поля, точек сброса сыпучих средств защиты растений, заполнение емкости сыпучими средствами защиты растений и запуск беспилотного летательного аппарата. Основываясь на информации GPS-комплекса о местоположении летательного аппарата, в точках сброса сыпучих средств защиты растений блок управления запускает электродвигатель дозатора, в который через гофрированную трубу под собственным весом поступают средства защиты растений и попадают на дозирующее колесо. Переменный резистор определяет количество оборотов дозирующего колеса, лежащих в диапазоне 40-60 об/мин, подстроечный резистор устанавливает расход смеси в г/км. Далее происходит сброс дозы сыпучих средств защиты растений, а пропорционально-интегрально-дифференцирующий регулятор в соответствии с показаниями датчика Холла контролирует процесс сброса смеси, уменьшая или увеличивая их дозировку. Комплекс для внесения сыпучих средств защиты растений содержит емкость для сыпучих средств защиты растений, дозатор, связанный посредством гибкой гофрированной трубы с емкостью для сыпучих средств защиты растений. Дозатор выполнен в виде барабана с отверстием для сброса средств защиты растений. Внутри барабана расположены электродвигатель, редуктор, вал редуктора, дозирующее колесо с расположенными на нем неодимовыми магнитами и датчиком, и выполненным в виде крыльчатки, в которой объем между лопастями равен 0,2 грамма. Между корпусом дозатора и дозирующим колесом установлена мягкая прокладка, предохраняющая от избыточного поступления сыпучих средств защиты растений. Электродвигатель посредством кабелей подключен к блоку управления, на внешней стороне которого находятся LED-дисплей, переменный резистор и подстроечный резистор. В блоке управления установлен пропорционально-интегрально-дифференцирующий регулятор, подключенный к датчику Холла посредством кабелей, что позволяет контролировать процесс сброса смеси. Комплекс выполнен с возможностью установки на беспилотном летательном аппарате, снабженном GPS-компасом, связанным с блоком управления. Обеспечивается повышение эффективности использования сыпучих удобрений, средств биологической или химической защиты, обеспечение дифференцированного и сверхточного внесения их на растительный покров.
Недостатками данного изобретения являются невозможность использования комплекса для внесения жидких средств защиты растений и комплексных удобрений, что снижает его универсальность и ограничивает сферу применения.
Техническим результатом изобретения является повышение эффективности использования средств биологической или химической защиты растений, жидких комплексных удобрений при их ультрамалообъемном внесении, обеспечение дифференцированного и точного внесения их на локализованный проблемный участок или объект на основании данных геопозиционирования с помощью беспилотного авиационного средства вертолетного типа (далее – БАС, мультикоптер) с малой взлетной массой, путем снижения энергоемкости процесса подачи и дозирования технологического материала.
В заявляемом устройстве, состоящем из кольца, в котором устанавливается проставка со втулкой, а в нижней его части расположен корпус, в который устанавливается уголковый штуцер с форсункой и расположен соленоид с запирающим стержнем и возвратной пружиной, управляемый через реле дистанционно оператором или на основании сигналов управляющего блока, связанного с блоком геопозиционирования БАС, при этом в кольцо устанавливается стакан для заправки рабочей жидкости в емкость, заявленный технический результат достигается тем, что для обеспечения рабочего напора в форсунке при подаче материала, в емкости создается избыточное давление воздуха с помощью резервуара высокого давления, предварительно накачиваемого от внешнего источника сжатого воздуха, постоянное значение рабочего давления в форсунке обеспечивается пневматическим редуктором, вне зависимости от остаточного давления в резервуаре, в течение всего рабочего цикла опрыскивания.
Указанные отличительные признаки являются существенными и достаточными для достижения указанного технического результата, поскольку использование в заявляемом устройстве, в качестве источника рабочего давления, резервуара с предварительной накачкой от внешнего источника сжатого воздуха и пневматического редуктора, позволяет отказаться от использования насоса в конструкции опрыскивателя, тем самым снижая удельные энергозатраты на процесс подачи и дозирования технологического материала и позволяя использовать в качестве носителя опрыскивающего модуля БАС с малой взлетной массой и невысокой емкостью бортового источника питания.
Изобретение поясняется чертежами.
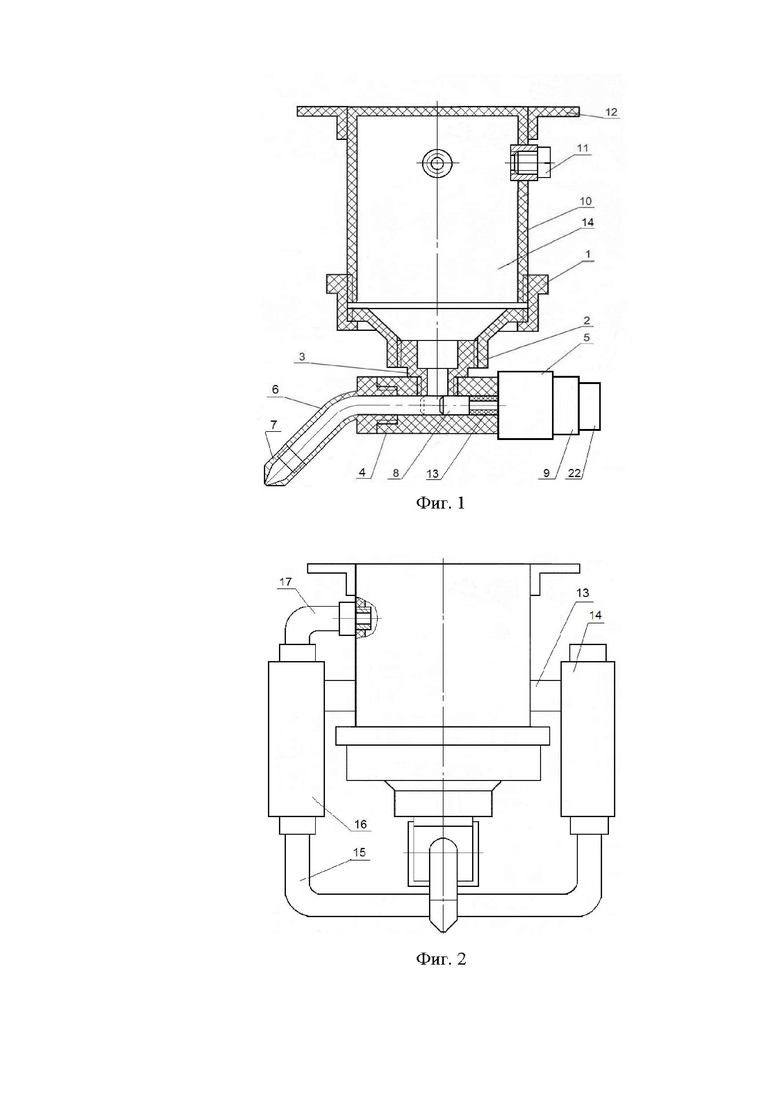
На фиг. 1 представлен вид устройства сбоку с разрезом.
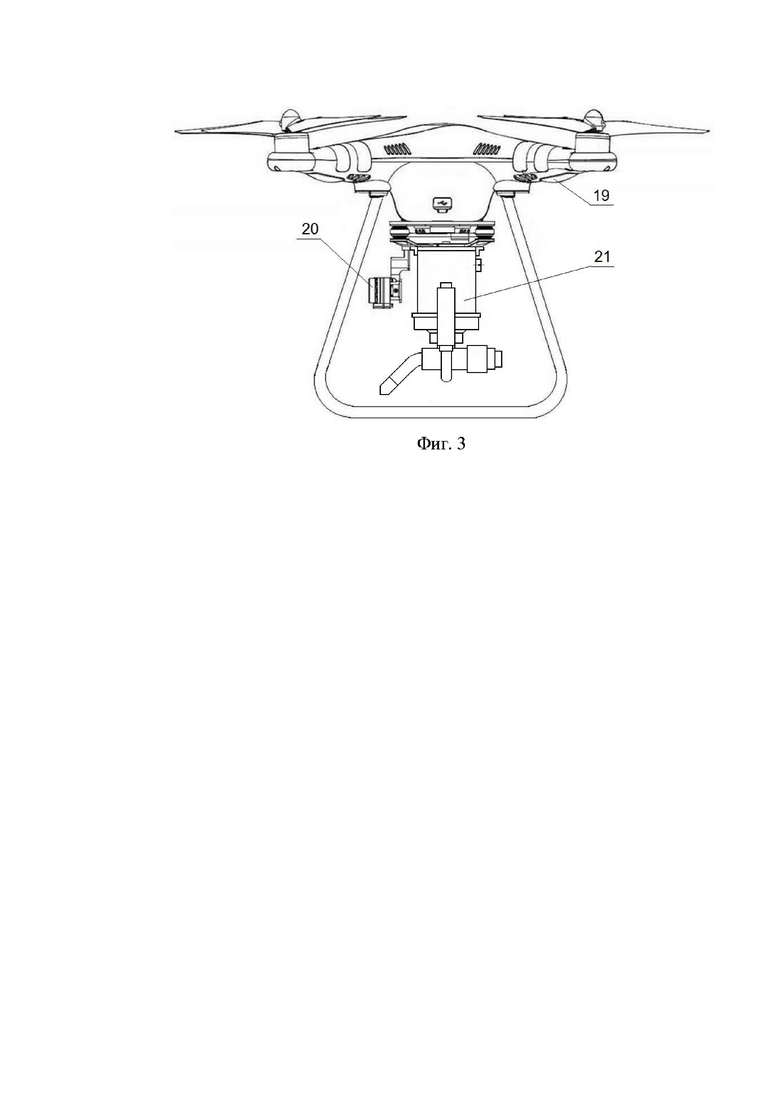
На фиг. 2 – вид устройства спереди.
На фиг. 3 – общий вид БАС с установленным устройством для опрыскивания сельскохозяйственных растений.
Устройство состоит из кольца 1, в котором устанавливается проставка 2 со втулкой 3. В нижней части модуля расположен корпус 4, в который устанавливается уголковый штуцер 5 с форсункой 6, а также расположен соленоид 7 с запирающим стержнем 8 и возвратной пружиной 9, управляемый через реле 10 дистанционно оператором или сигналами управляющего блока 22, связанного с блоком геопозиционирования БАС. Открытие канала происходит при перемещении стержня 8 в крайнее положение путем подачи напряжения на соленоид 7. При отключении питания запорный стержень, 8 под действием пружины 9, возвращается в исходное положение, запирая канал.
Сверху в кольцо 1 устанавливается стакан 11 для заправки рабочей жидкости в емкость 12. На стакане 11 с помощью держателя 13 закреплен резервуар высокого давления 14, соединенный посредством нижнего патрубка 15 (на фиг.1 не показан) с пневматическим редуктором 16, который через верхний патрубок 17 создает избыточное давление (10-20 атм) воздуха в емкости 12.
Устройство крепится на БАС с помощью кронштейнов 18. Для питания соленоида 7 и подачи на него управляющего сигнала его контакты соединяются с соответствующими клеммами источника питания на БАС.
На фиг. 3 схематично показан БАС 19 с видеокамерой 20 и установленным опрыскивающим модулем 21.
БАС с установленным устройством 21 имеет возможность управления курсом и траекторией движения, как в ручном режиме - дистанционно оператором на основе изображения подвесной видеокамеры 20, так и в автоматическом - в соответствии с заложенной в управляющий блок 22, связанный с блоком геопозиционирования БАС, траектории движения и контрольными точками внесения технологического материала.
Устройство работает следующим образом.
В специализированном программном приложении для мобильных устройств, служащем для управления полетом беспилотных летательных аппаратов, задают координаты границ участка, подлежащего обработке, курс перемещения БАС с координатами точек внесения технологическог материала.
Устройство устанавливают на БАС. Емкость 12 заполняют рабочей жидкостью (объемом около 0,5 л), заливное отверстие закрывают пробкой 11. На резервуаре высокого давления 14 открывают клапан и воздух через пневматический редуктор 16 поступает в верхнюю часть емкости 12, создавая там избыточное давление.
Производят пробный распыл рабочего раствора через выходное отверстие форсунки 6. Если подтверждается необходимое качество пробного распыла, то осуществляется запуск БАС для выполнения технологической операции.
В автоматическом режиме пилотирования, управляющий блок 22, основываясь на информации блока геопозиционирования о местоположении летательного аппарата, в точках внесения технологического материала, подает управляющий сигнал на реле 10. В ручном режиме пилотирования управляющий сигнал на реле 10 подается оператором дистанционно с пульта управления. Открытие канала происходит при перемещении запорного стержня 8 соленоида 7 на величину, соответствующую установленной дозе внесения материала в заданной точке маршрута БАС, и настроенную по результатам предварительной калибровки. При отключении питания запорный стержень, 8 под действием пружины 9, возвращается в исходное положение, запирая канал.
Когда рабочий раствор в емкости заканчивается, БАС возвращают для ее заправки и, затем технологический процесс опрыскивания повторяется. При снижении давления в резервуаре 14 ниже допустимого уровня его заменяют заправленным.
Применение устройства в рамках способа ультрамалообъемного внесения СЗР и ЖКУ позволит избежать повреждения посевов, точечно обработать те объекты и участки, куда доступ традиционной сельскохозяйственной технике закрыт по причине труднодоступности (например, из-за высокой влажности почвы, небольшой площади и сложной конфигурации), ликвидировать локальные очаги заражения культур болезнями или вредителями, расходуя минимальное количество препаратов и СЗР, а также использоваться при обработке плодово-ягодных насаждений (в т.ч. кустарников, отдельно стоящих деревьев). Возможность использования в качестве носителя устройства БАС с малой взлетной массой позволяет снизить удельные эксплуатационные затраты на обработку сельскохозяйственных посевов и насаждений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ внесения сыпучих средств защиты растений и комплекс для его осуществления | 2018 |
|
RU2694502C1 |
| Комплекс летательных аппаратов для внесения жидких средств химизации в точном земледелии | 2016 |
|
RU2617163C1 |
| Комплекс летательных аппаратов для дифференцированного внесения жидких средств химизации | 2016 |
|
RU2622617C1 |
| Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии | 2020 |
|
RU2769411C1 |
| Способ внесения средств биологической защиты растений в виде энтомофагов и устройство дозирования для его осуществления | 2024 |
|
RU2830613C1 |
| Комплекс беспилотных летательных средств на базе аэростатического летательного аппарата | 2018 |
|
RU2681966C1 |
| Беспилотный вертолет для внесения пестицидов, удобрений и других агрохимикатов в точном земледелии | 2021 |
|
RU2754790C1 |
| Комплекс беспилотных летательных средств на базе аэростатического летательного аппарата | 2020 |
|
RU2734661C1 |
| Воздухоплавательный роботизированный аппарат для мониторинга и внесения средств защиты растений, удобрений в точном земледелии | 2019 |
|
RU2703198C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
Изобретение относится к сельскохозяйственной промышленности. Устройство для осуществления ультрамалообъемного опрыскивания сельскохозяйственных растений с использованием беспилотных авиационных средств вертолетного типа, включающее в себя кольцо, в котором устанавливается проставка со втулкой, в нижней его части расположен корпус, в который устанавливается уголковый штуцер с форсункой и соленоид с запирающим стержнем и возвратной пружиной, управляемый через реле оператором дистанционно или управляющим блоком, связанным с блоком геопозиционирования, при этом в кольцо устанавливается стакан для заправки рабочей жидкости в его емкость, для обеспечения рабочего напора в форсунке при подаче материала в емкости создается избыточное давление воздуха с помощью резервуара высокого давления, предварительно накачиваемого от внешнего источника сжатого воздуха. При этом постоянное значение рабочего давления в емкости и форсунке при подаче рабочей жидкости обеспечивается пневматическим редуктором вне зависимости от остаточного количества жидкости в емкости в течение всего рабочего цикла опрыскивания. Способ ультрамалообъемного опрыскивания сельскохозяйственных растений с использованием беспилотных авиационных средств (БАС) вертолетного типа включает дозированную подачу технологического материала, задание координат границ участка, подлежащего обработке, курс перемещения БАС с координатами точек внесения технологического материала. Затем запускают БАС для выполнения операции, в точках внесения технологического материала, управляющий сигнал на реле поступает от управляющего блока, основываясь на информации блока геопозиционирования о местоположении летательного аппарата - в автоматическом режиме пилотирования или подается оператором дистанционно с пульта управления - в ручном режиме пилотирования, соленоид перемещает запирающий стержень, сжимая возвратную пружину и открывая канал в корпусе, происходит распыл рабочей жидкости через форсунку, при этом величина перемещения запирающего стержня согласована с установленной дозой внесения рабочей жидкости в конкретной точке маршрута БАС по результатам предварительной калибровки. 2 н.п. ф-лы, 3 ил.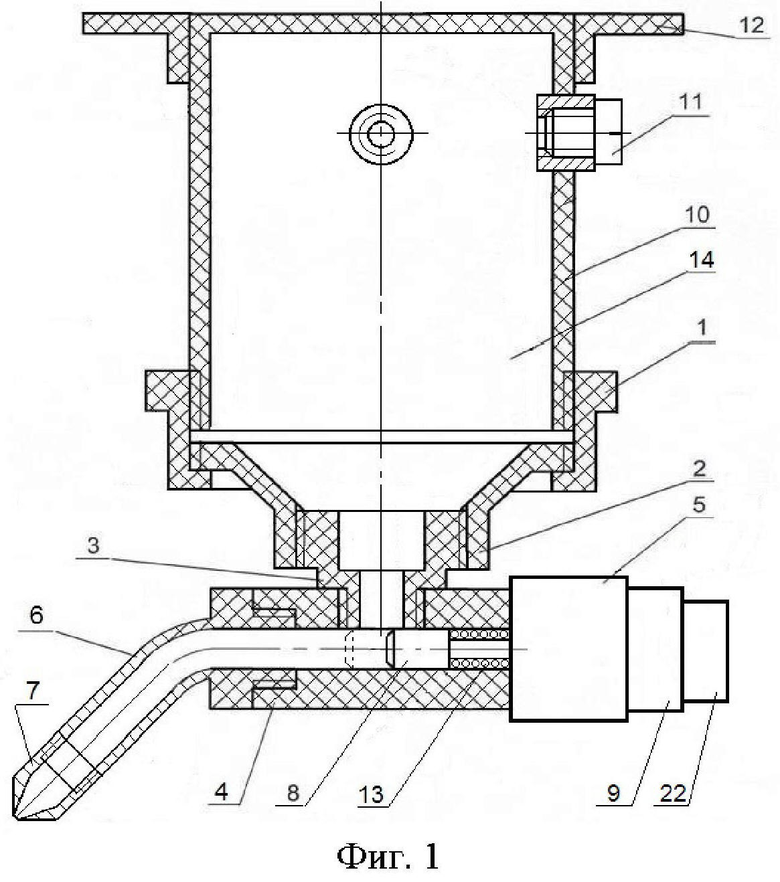
1. Устройство для осуществления ультрамалообъемного опрыскивания сельскохозяйственных растений с использованием беспилотных авиационных средств вертолетного типа, включающее в себя кольцо, в котором устанавливается проставка со втулкой, в нижней его части расположен корпус, в который устанавливается уголковый штуцер с форсункой и соленоид с запирающим стержнем и возвратной пружиной, управляемый через реле оператором дистанционно или управляющим блоком, связанным с блоком геопозиционирования, при этом в кольцо устанавливается стакан для заправки рабочей жидкости в его емкость, для обеспечения рабочего напора в форсунке при подаче материала в емкости создается избыточное давление воздуха с помощью резервуара высокого давления, предварительно накачиваемого от внешнего источника сжатого воздуха, отличающееся тем, что постоянное значение рабочего давления в емкости и форсунке при подаче рабочей жидкости обеспечивается пневматическим редуктором, вне зависимости от остаточного количества жидкости в емкости в течение всего рабочего цикла опрыскивания.
2. Способ ультрамалообъемного опрыскивания сельскохозяйственных растений с использованием беспилотных авиационных средств (БАС) вертолетного типа, включающий дозированную подачу технологического материала, отличающийся тем, что задаются координаты границ участка, подлежащего обработке, курс перемещения БАС с координатами точек внесения технологического материала, БАС оснащается устройством для осуществления ультрамалообъемного опрыскивания сельскохозяйственных растений, включающим в себя кольцо, в котором устанавливается проставка со втулкой, в нижней его части расположен корпус, в который устанавливается уголковый штуцер с форсункой и соленоид с запирающим стержнем и возвратной пружиной, управляемый через реле оператором дистанционно или управляющим блоком, связанным с блоком геопозиционирования, при этом в кольцо устанавливается стакан для заправки рабочей жидкости в его емкость, для обеспечения рабочего напора в форсунке при подаче материала в емкости может быть создано избыточное рабочее давление воздуха с помощью резервуара высокого давления, при этом постоянное значение данного давления в емкости и форсунке при подаче рабочей жидкости обеспечивается пневматическим редуктором, вне зависимости от остаточного количества жидкости в емкости в течение всего рабочего цикла опрыскивания, емкость заполняется рабочей жидкостью, в резервуаре высокого давления открывается клапан и через пневматический редуктор создается в емкости избыточное рабочее давление, запускают БАС для выполнения операции, в точках внесения технологического материала, управляющий сигнал на реле поступает от управляющего блока, основываясь на информации блока геопозиционирования о местоположении летательного аппарата - в автоматическом режиме пилотирования или подается оператором дистанционно с пульта управления - в ручном режиме пилотирования, соленоид перемещает запирающий стержень, сжимая возвратную пружину и открывая канал в корпусе, происходит распыл рабочей жидкости через форсунку, при этом величина перемещения запирающего стержня согласована с установленной дозой внесения рабочей жидкости в конкретной точке маршрута БАС по результатам предварительной калибровки.
| Способ внесения сыпучих средств защиты растений и комплекс для его осуществления | 2018 |
|
RU2694502C1 |
| JP 2008167703 A, 24.07.2008 | |||
| Комплекс летательных аппаратов для дифференцированного внесения жидких средств химизации | 2016 |
|
RU2622617C1 |
| АВИАЦИОННАЯ СИСТЕМА ОПРЫСКИВАНИЯ "АМО-3" А.В. НИКИТИНА | 2010 |
|
RU2452663C2 |
| УСТРОЙСТВО МАСЛОЦОВА В.А. ДЛЯ РАЗБРЫЗГИВАНИЯ ЖИДКОСТИ С ЛЕТАТЕЛЬНОГО АППАРАТА | 1997 |
|
RU2129507C1 |

