Ссылки на родственные заявки
Согласно настоящей заявке испрашивается приоритет в соответствии с предварительной заявкой на выдачу патента США №62/150766, поданной 21 апреля 2015 г., раскрытие которой включено во всей полноте посредством ссылки.
Область техники
Настоящее изобретение относится к области калибровки данных и, более конкретно, к калибровке данных об урожайности после уборки урожая.
Уровень техники
Современные системы управления на основе GPS в таких машинах, как, например, зерноуборочные комбайны, позволяют изготовителям собирать информацию о сельскохозяйственных культурах (например, информацию об урожае) в выборочных точках (например, в точках данных об урожайности) во время уборки урожая с поля. Виды собираемой информации отличаются по изготовителям и моделям измерительного инструмента. Обычно собранная информация содержит текущую информацию об урожайности (например, количество бушелей на акр [бушель/акр]), информацию о местоположении, значения уровня влажности и параметры машины и/или орудия (например, количество оборотов в минуту, расход топлива и т.д.).
Как и для большинства измерительных инструментов, точность этих измерительных инструментов варьируется по ряду причин (например, из-за отклонения показаний системы глобального позиционирования [GPS], повреждений, колебания температур и т.д.). Важным компонентом в сохранении точности является калибровка, которая может быть определена как корректировка измерительного инструмента в соответствии с известным стандартом. Один конкретный пример предусматривает корректировку уровней срабатывания встроенного или иным образом подключенного датчика влажности для установления соответствия с известным результатом из доверенного источника, такого, как, например, показания, полученные из внешнего источника данных, такого, как, например, наземная машина.
Существует серьезная необходимость в надлежащим образом откалиброванном измерительном инструменте, однако калибровка представляет собой такой процесс, который выполняют не всегда, при этом затруднения, связанные с калибровкой, могут нарастать по мере движения машин по полю во время уборки урожая.
Сущность изобретения
Предоставлена система для калибровки точек данных об урожайности. В систему калибровки поступает множество групп точек данных об урожайности. Каждая группа связана с атрибутом, например, идентификатором машины, идентификатором зоны, идентификатором локализованной зоны и/или идентификатором влажности. На основании точек данных об урожайности из множества групп система вычисляет общую суммарную урожайность. На основании точек данных об урожайности каждой группы система вычисляет суммарную урожайность по группе. Система вычитает из каждой точки данных об урожайности из группы суммарную урожайность по группе, получая скорректированные точки данных об урожайности. Система прибавляет общую суммарную урожайность к каждой из скорректированных точек данных об урожайности, получая откалиброванные точки данных об урожайности.
В некоторых конфигурациях общая суммарная урожайность представляет собой общую среднюю урожайность, а суммарная урожайность по группе представляет собой среднюю урожайность по группе. Согласно другим конфигурациям общая суммарная урожайность представляет собой общую медианную урожайность, а суммарная урожайность по группе представляет собой медианную урожайность по группе.
Согласно другим конфигурациям система определяет набор точек данных об урожайности, содержащий точки данных об урожайности, находящиеся в пределах порогового расстояния от каждой точки данных об урожайности, и выполняет калибровку точки данных об урожайности на основании набора точек данных об урожайности с получением точки данных об урожайности, откалиброванной по окрестности.
Согласно другим конфигурациям в систему поступает доверительное значение, связанное с атрибутом для каждой группы, и на основании доверительного значения система выполняет калибровку точек данных об урожайности группы.
Согласно другим конфигурациям система получает доступ к заданному корректировочному значению, связанному с атрибутом для каждой группы, и выполняет корректировку каждой откалиброванной точки данных об урожайности по заданному корректировочному значению. Корректировочным значением может быть число или процентная величина.
Краткое описание чертежей
Основные идеи вариантов осуществления настоящего изобретения станут более понятны после прочтения приведенного ниже подробного описания, выполненного со ссылками на прилагаемые фигуры.
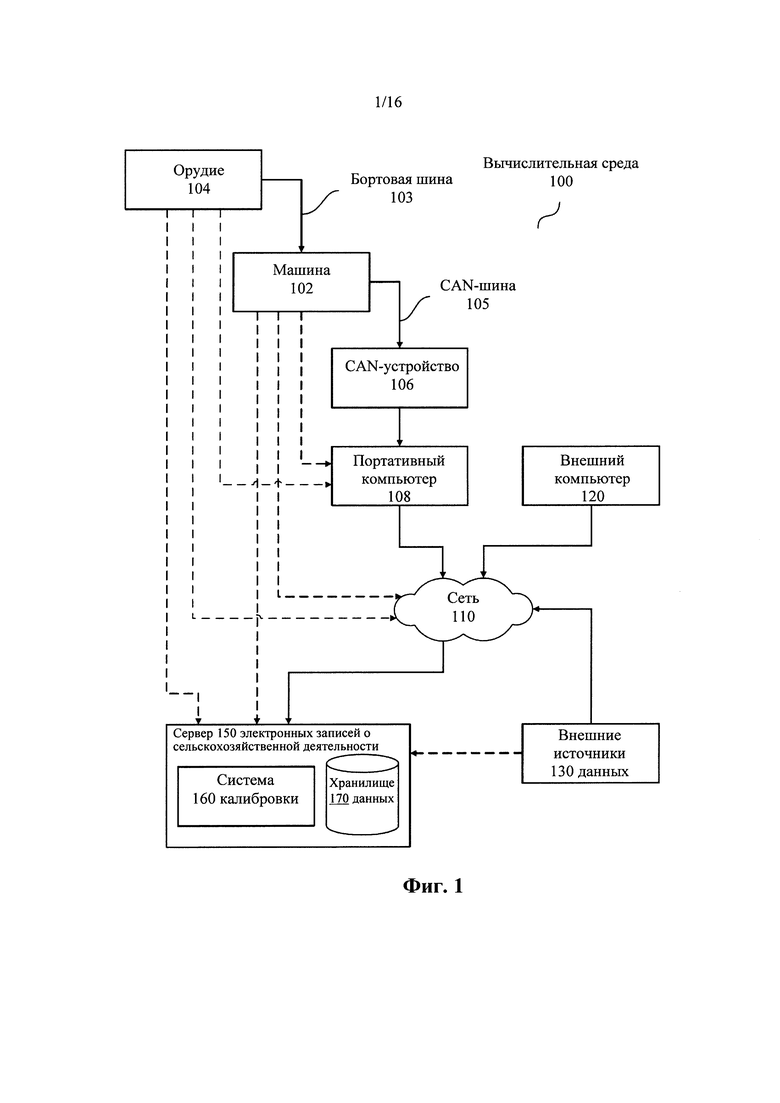
На фиг. 1 показана функциональная схема вычислительной среды в соответствии с одним вариантом осуществления, включающей сельскохозяйственную технику, движущуюся по полю.
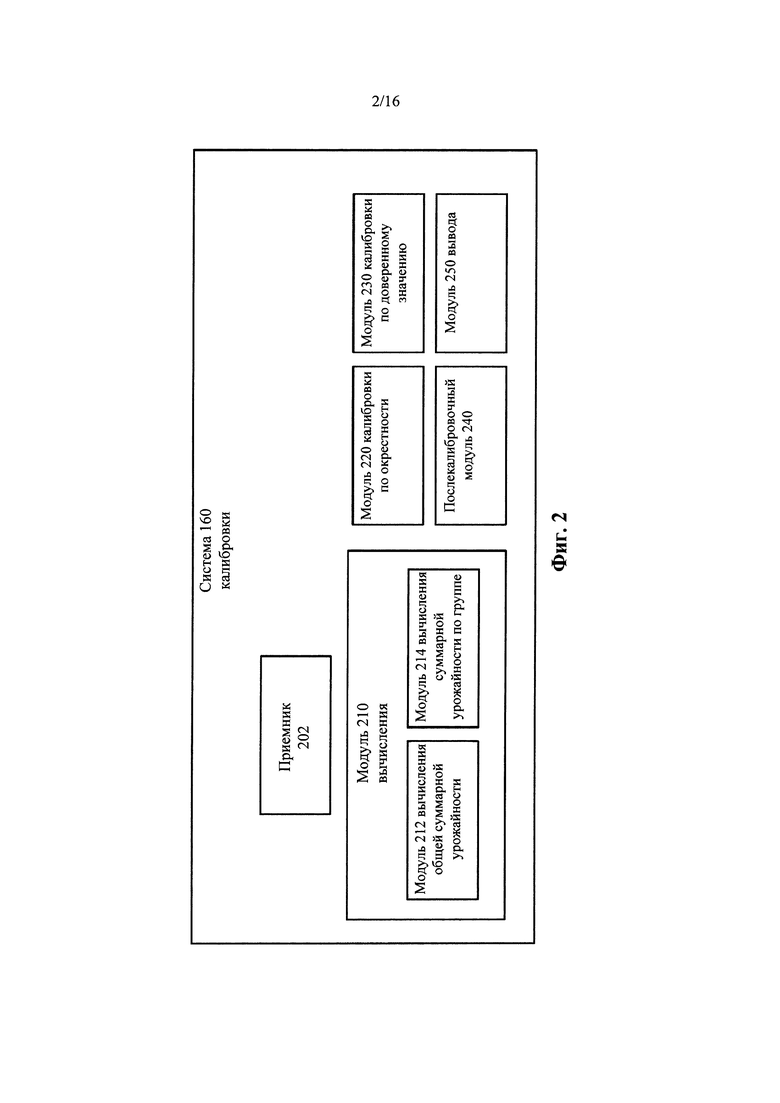
На фиг. 2 показана функциональная схема логических компонентов в соответствии с одним вариантом осуществления компьютерной системы для калибровки точек данных об урожайности.
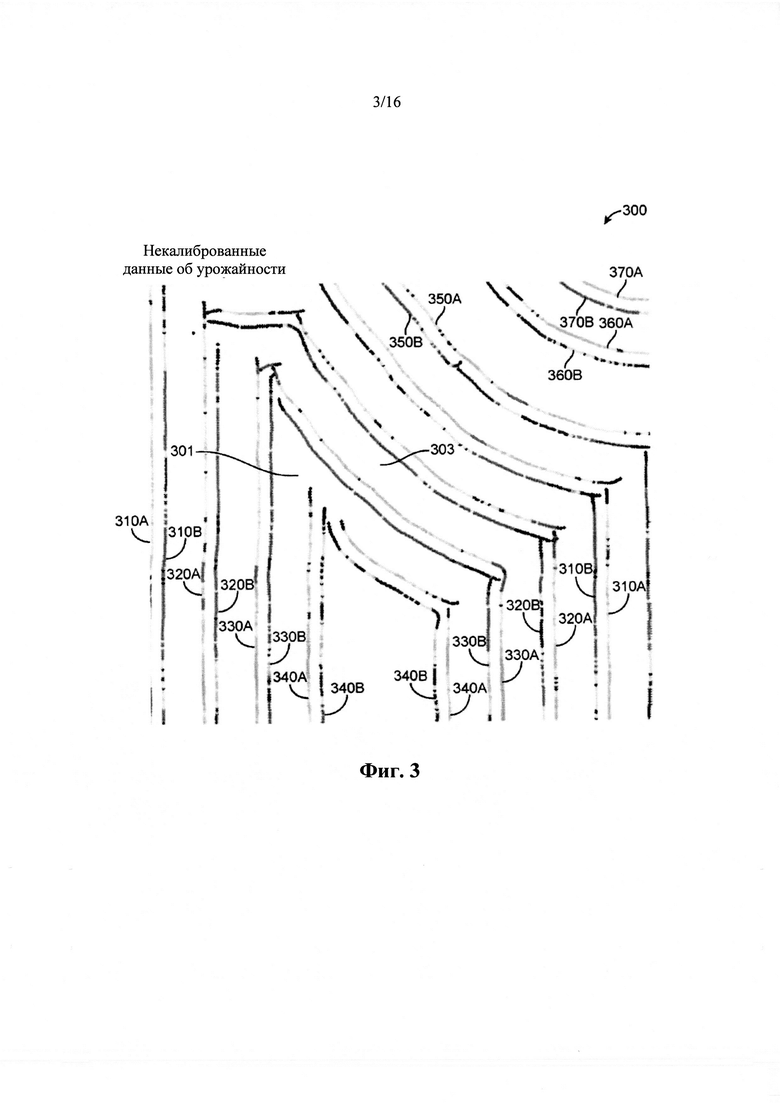
На фиг. 3 показаны некалиброванные точки данных об урожайности в соответствии с одним вариантом осуществления.
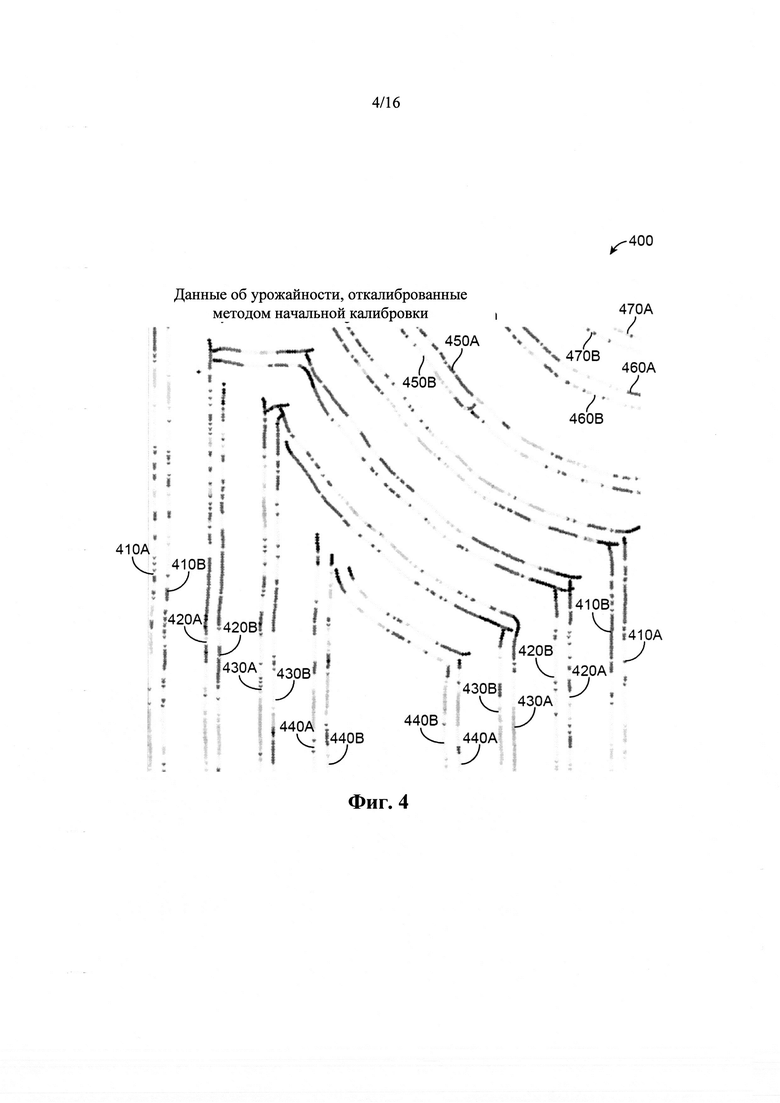
На фиг. 4 показаны точки данных об урожайности согласно фиг. 3, калиброванные методом начальной калибровки в соответствии с одним вариантом осуществления.
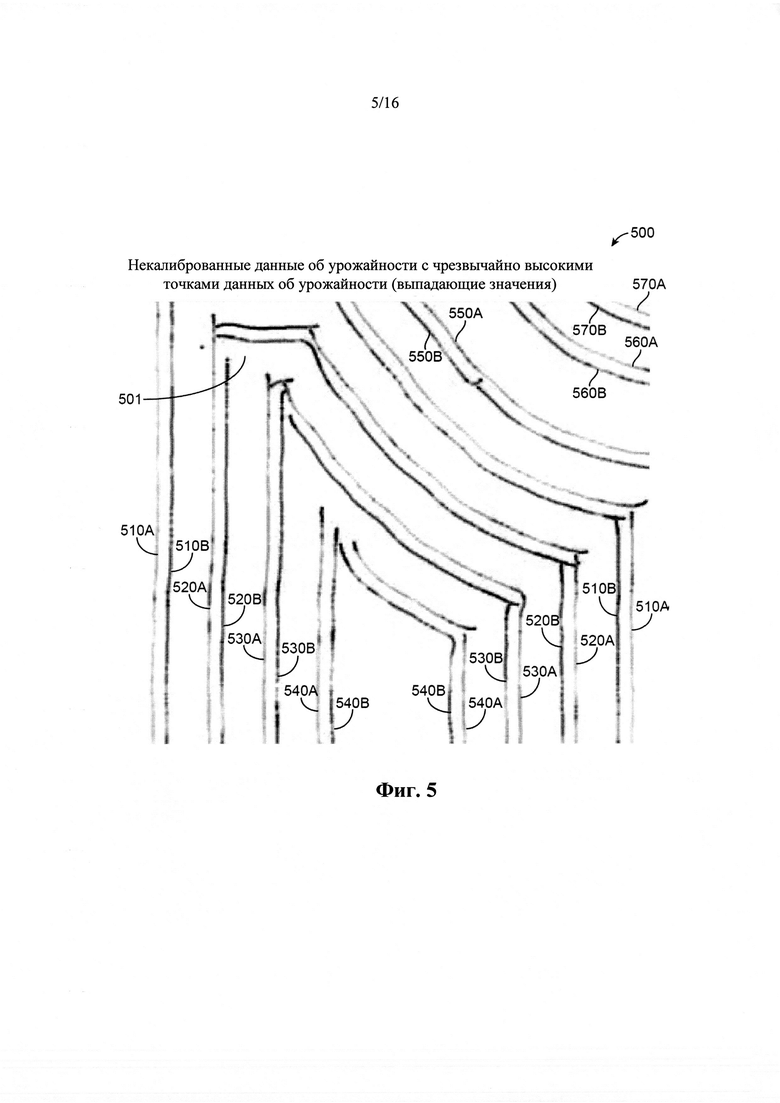
На фиг. 5 показаны некалиброванные точки данных об урожайности, к которым добавлены чрезвычайно высокие значения точек данных об урожайности, в соответствии с одним вариантом осуществления.
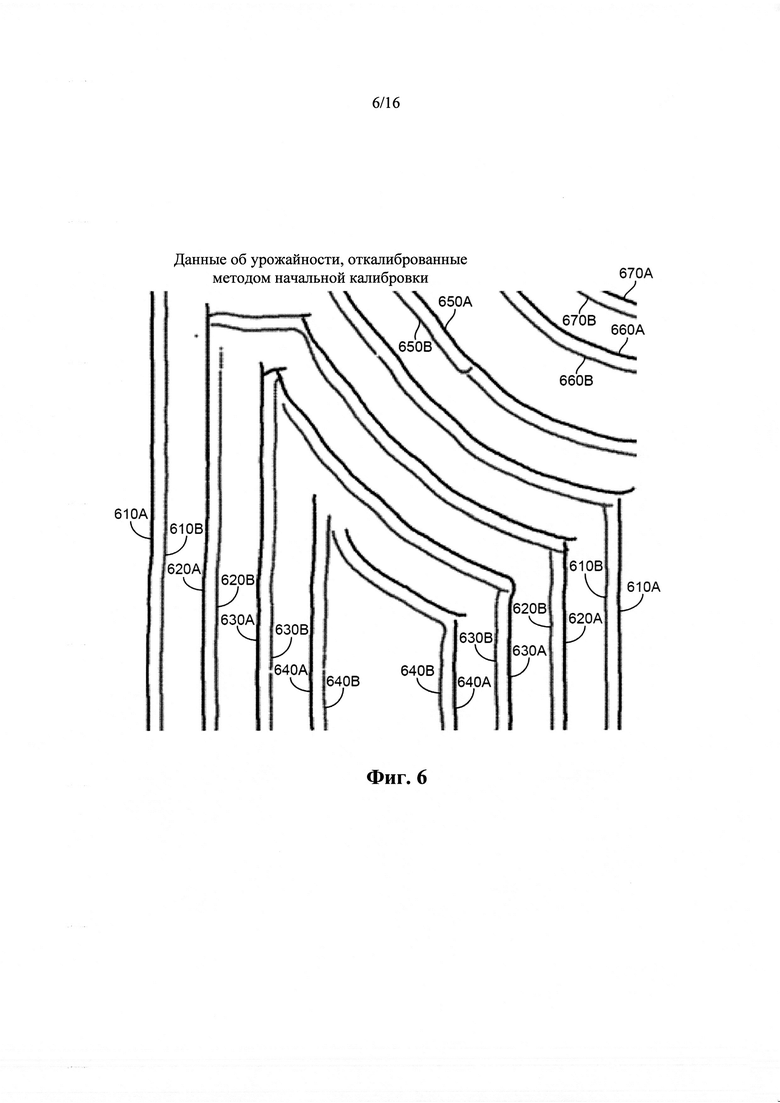
На фиг. 6 показаны точки данных об урожайности согласно фиг. 5, калиброванные методом начальной калибровки в соответствии с одним вариантом осуществления.
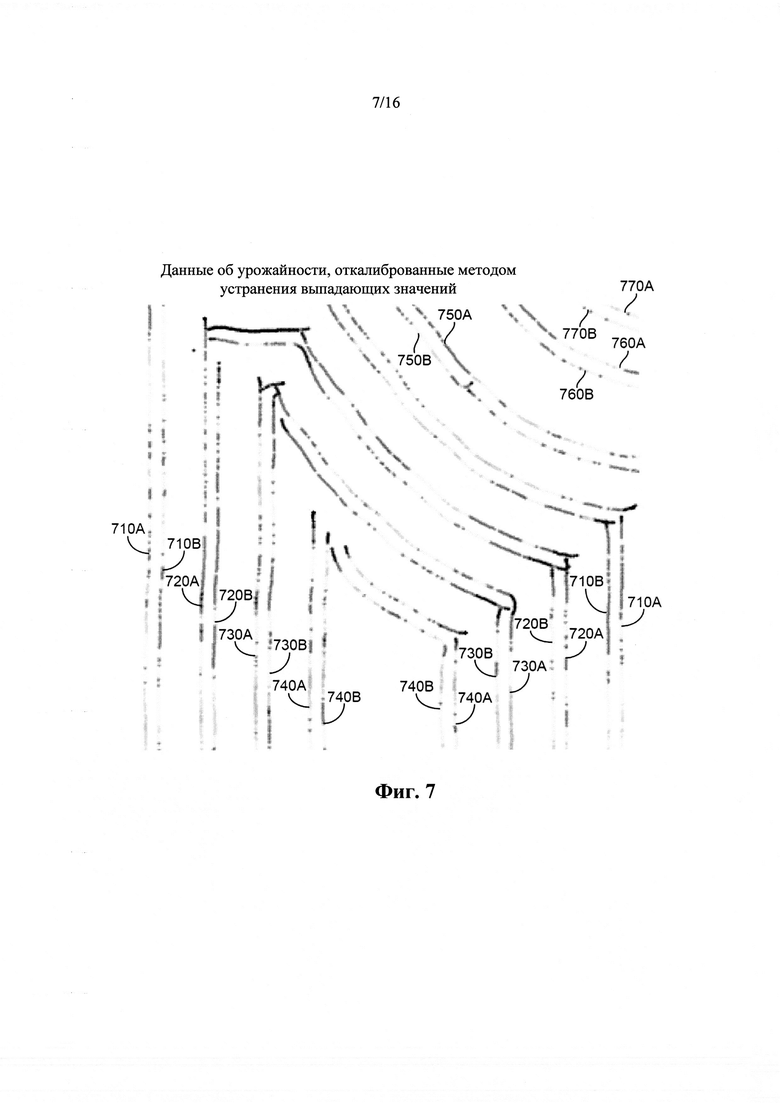
На фиг. 7 показаны точки данных об урожайности согласно фиг. 5, калиброванные методом устранения выпадающих значений, в соответствии с одним вариантом осуществления.
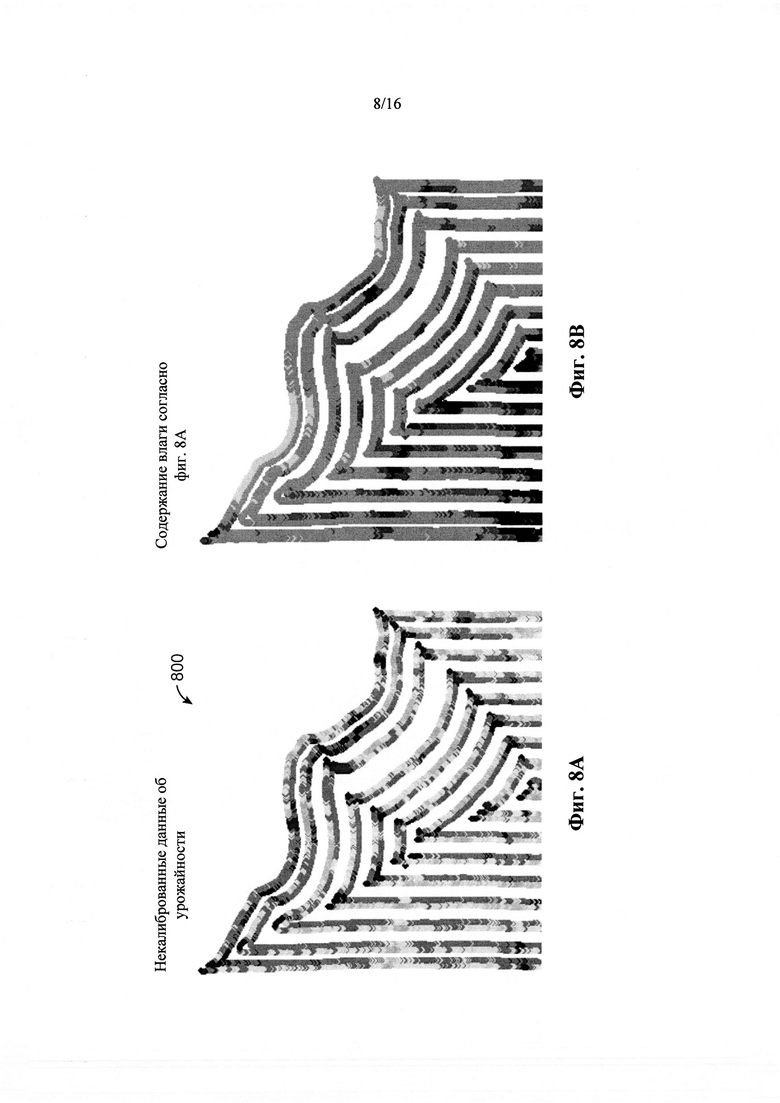
На фиг. 8А показаны некалиброванные точки данных об урожайности в соответствии с одним вариантом осуществления.
На фиг. 8В показано содержание влаги в точках данных об урожайности согласно фиг. 8А в соответствии с одним вариантом осуществления.
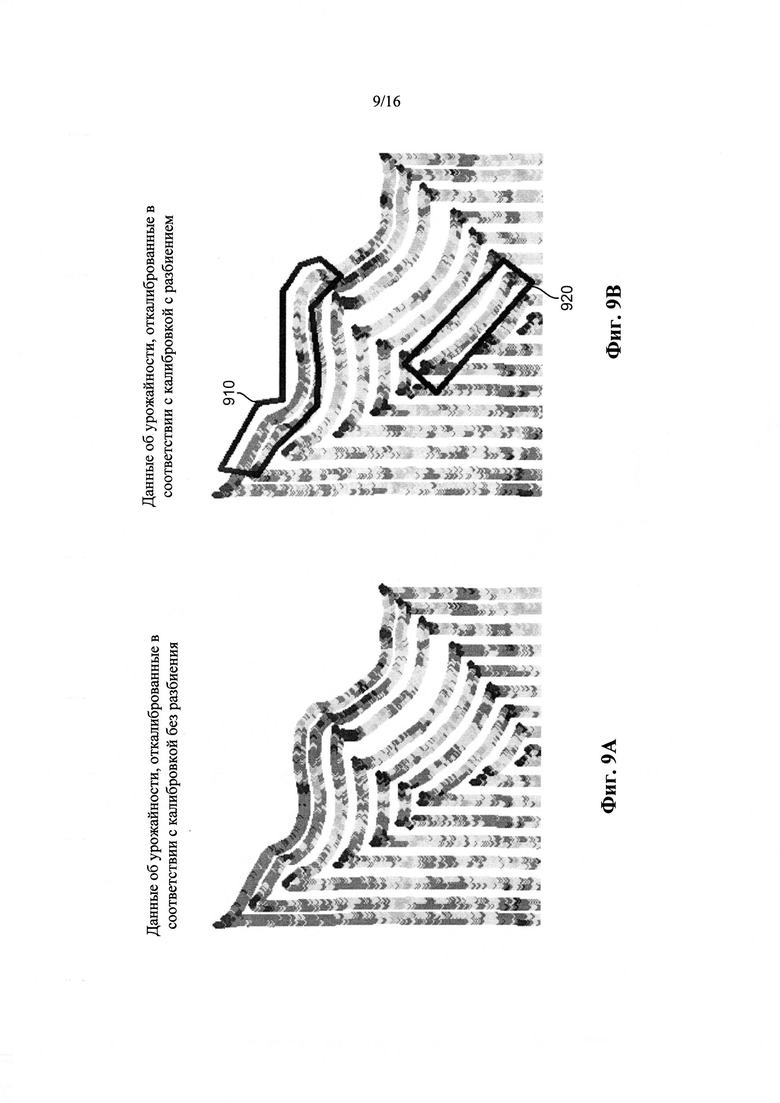
На фиг. 9А показаны точки данных об урожайности согласно фиг. 8А, калиброванные методом калибровки без разбиения, в соответствии с одним вариантом осуществления.
На фиг. 9В показаны точки данных об урожайности согласно фиг. 8А, калиброванные методом калибровки с разбиением, в соответствии с одним вариантом осуществления.
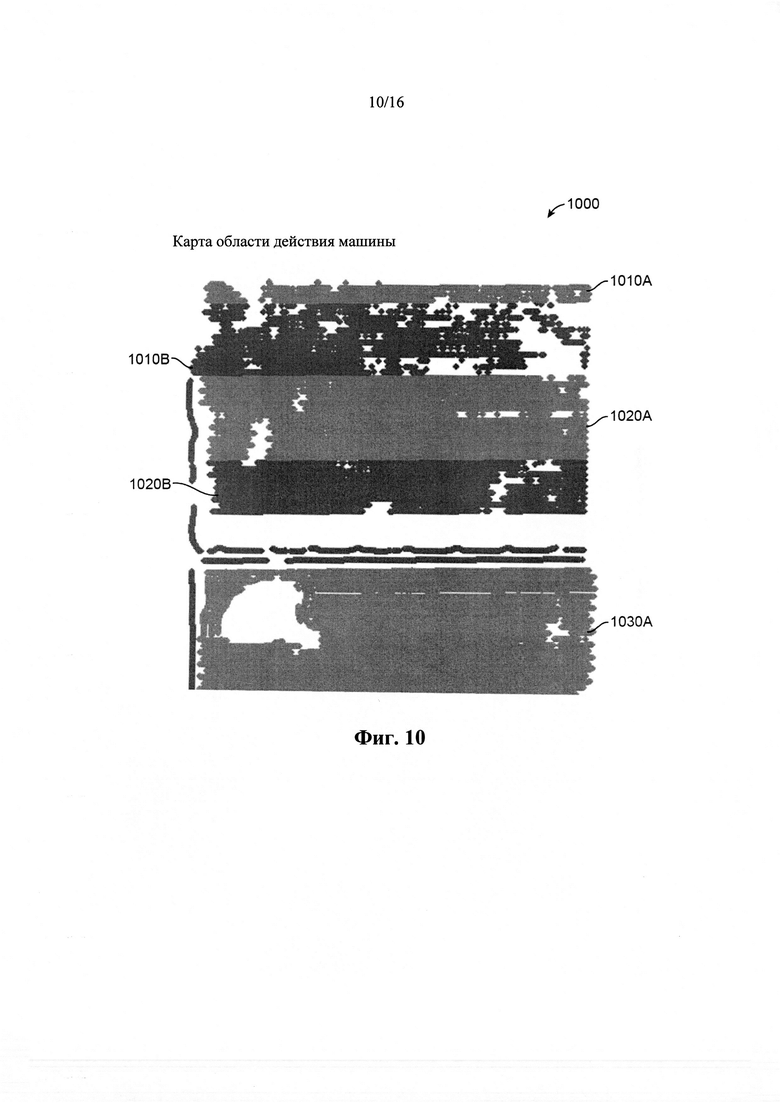
На фиг. 10 показана карта области действия машины в соответствии с одним вариантом осуществления.
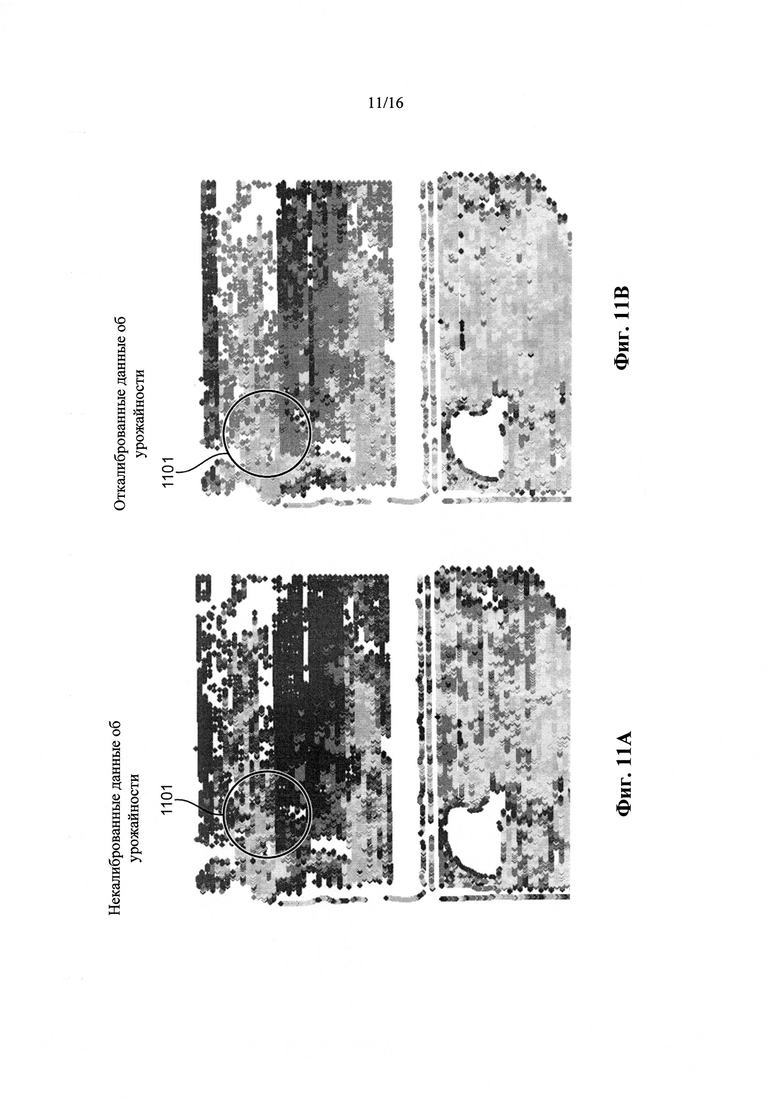
На фиг. 11А показаны некалиброванные точки данных об урожайности согласно фиг. 10 в соответствии с одним вариантом осуществления.
На фиг. 11В показаны калиброванные точки данных об урожайности согласно фиг. 11А в соответствии с одним вариантом осуществления.
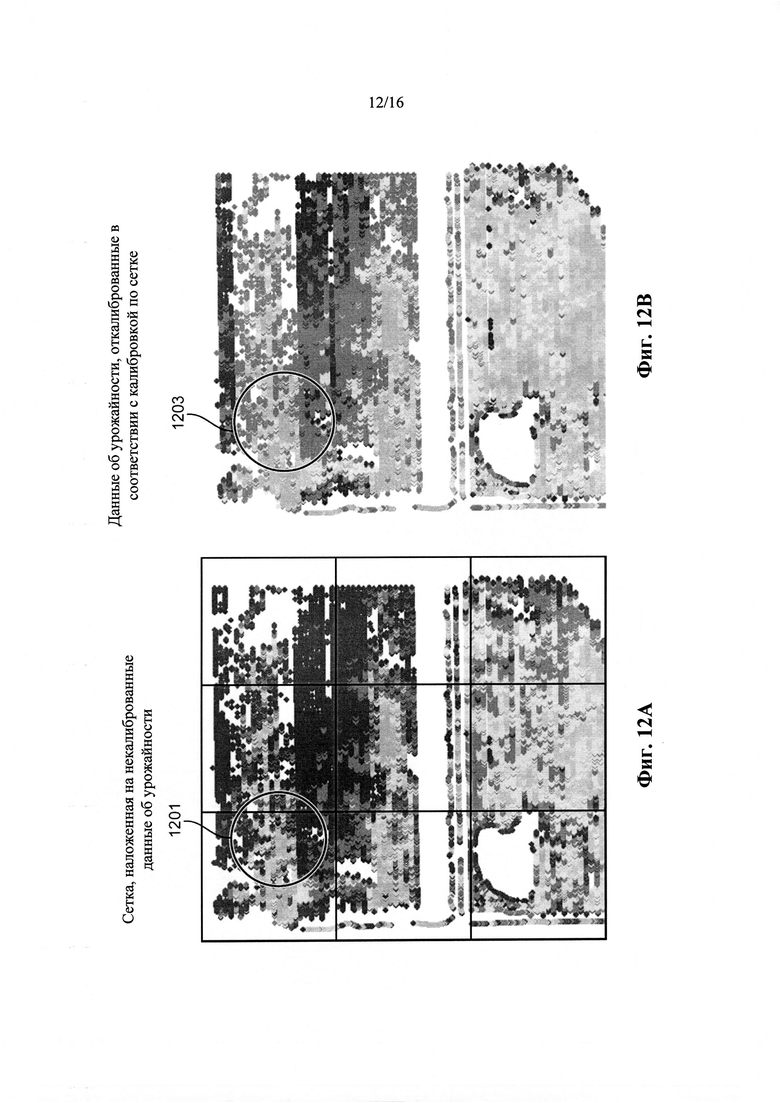
На фиг. 12А показана сетка, наложенная на некалиброванные точки данных об урожайности согласно фиг. 11А в соответствии с одним вариантом осуществления.
На фиг. 12В показаны калиброванные точки данных об урожайности согласно фиг. 12А, калиброванные методом калибровки на основе сетки, в соответствии с одним вариантом осуществления.
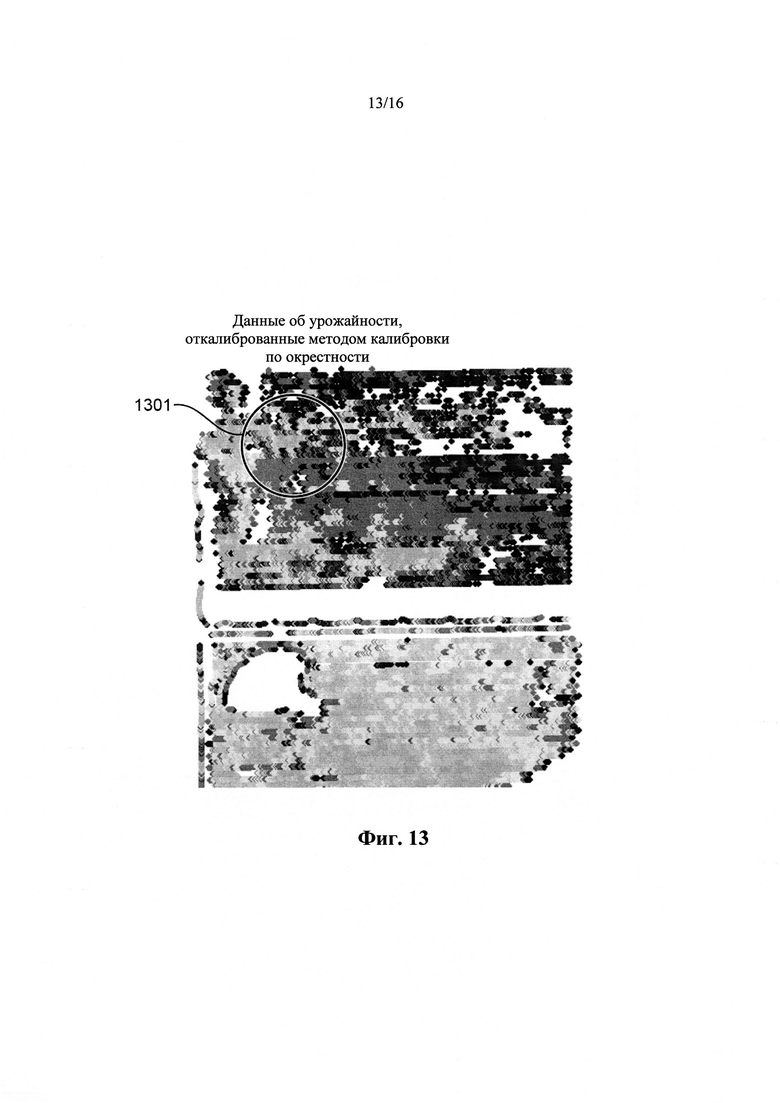
На фиг. 13 показаны точки данных об урожайности согласно фиг. 11А, откалиброванные методом калибровки по окрестности, в соответствии с одним вариантом осуществления.
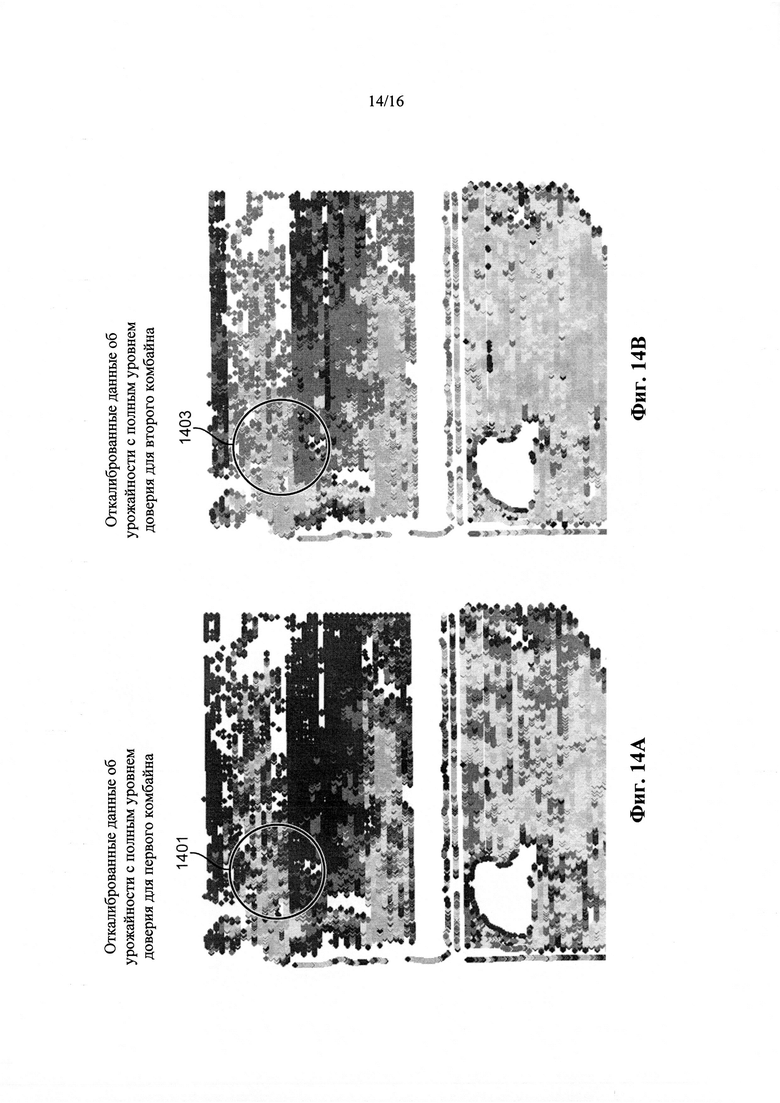
На фиг. 14А показаны калиброванные точки данных об урожайности согласно фиг. 11А, калиброванные с полным уровнем доверия для первой машины, в соответствии с одним вариантом осуществления.
На фиг. 14В показаны калиброванные точки данных об урожайности согласно фиг. 11А, калиброванные с полным уровнем доверия для второй машины, в соответствии с одним вариантом осуществления.
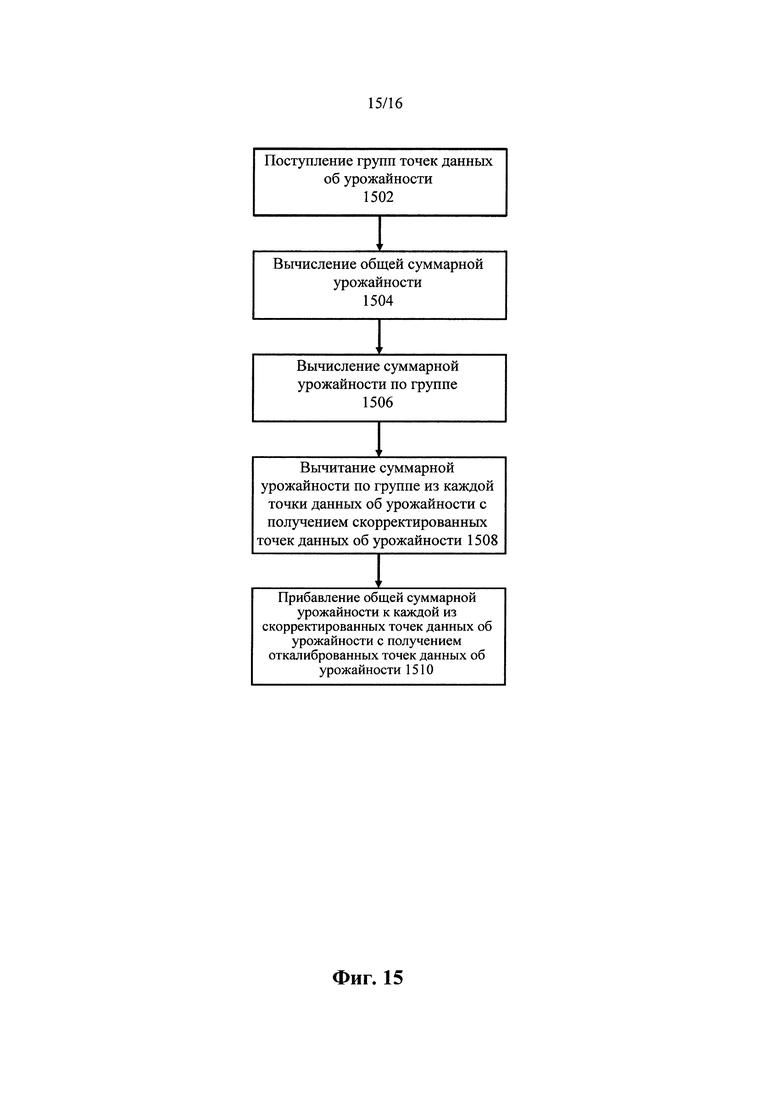
На фиг. 15 показана блок-схема приведенного в качестве примера процесса калибровки точек данных об урожайности в соответствии с одним вариантом осуществления.
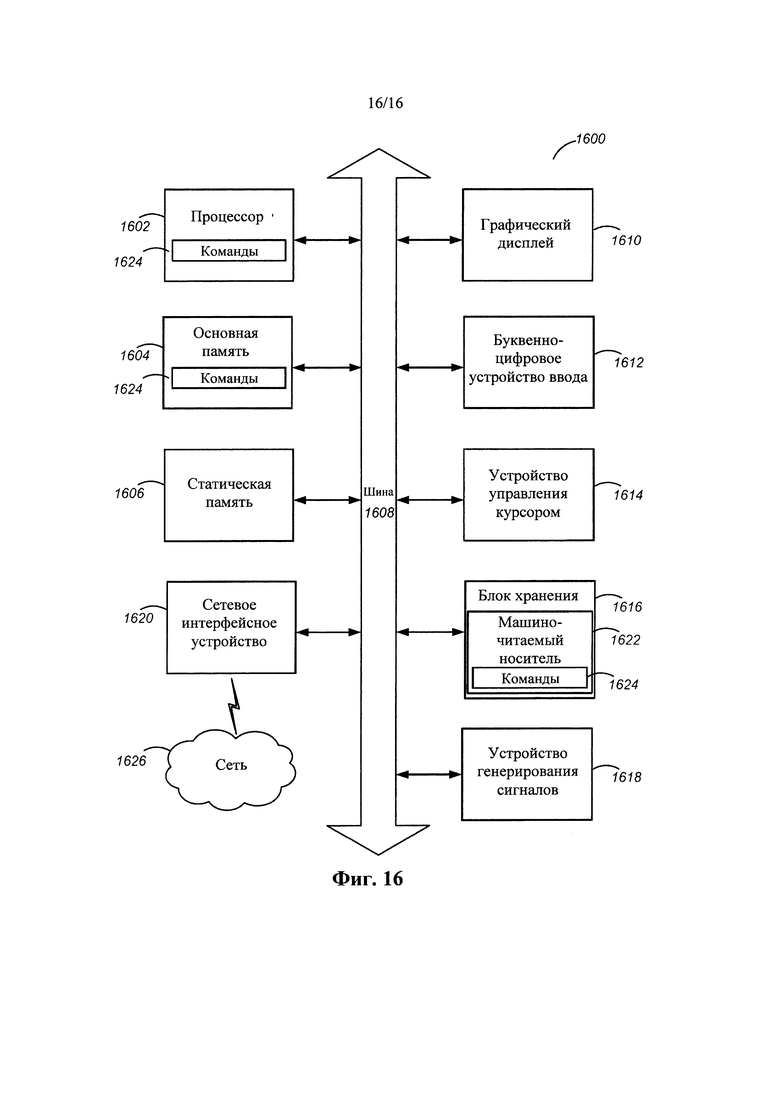
На фиг. 16 показан один вариант осуществления компонентов приведенной в качестве примера машины для считывания команд с машиночитаемого носителя и их выполнения процессором (или контроллером).
Далее будет приведено подробное описание нескольких вариантов осуществления настоящего изобретения, примеры которых показаны на прилагаемых фигурах. Следует отметить, что там, где это возможно, одинаковые или похожие функциональные элементы на фигурах обозначены одинаковыми или похожими ссылочными позициями. На фигурах отображены варианты осуществления описанной системы (или способа) для применения только в указанных целях. Из приведенного далее подробного описания специалисту в области техники, к которой относится настоящее изобретение, будут понятны альтернативные варианты осуществления раскрытых конструкций и способов, не выходящие за пределы объема настоящего изобретения.
Подробное описание изобретения
Собирая информацию об урожае, производители могут подробно проанализировать производственные затраты и прибыль, получая возможность составлять стратегические планы для будущих урожаев. Например, вариабельность точек данных об урожайности может указывать на границы зоны управления, которые могут использоваться для разработки предписаний заказчика по выполнению операции внесения удобрений на переменной скорости. Вычисление информации о суммарной урожайности (например, в бушелях/акр) как в качестве абсолютной меры (например, определение количестве бушелей, получаемых с поля), так и относительной меры (например, сравнение производственных скоростей двух зон управления) предусматривает вычисление непрерывного значения из набора дискретных выборок (для чего, следовательно, необходимы дополнительные сведения, такие как значение скорости и направление движения машины в момент сбора данных об урожайности).
Увеличение размеров ферм, наряду с появлением масштабных операций по уборке урожая по заказу, приводит в итоге к тому, что уборку урожая с полей часто выполняют несколько машин. Если две машины не откалибровать соответствующим образом, то, работая в одних и тех же условиях, они будут предоставлять разные результаты (т.е. к проблеме точности прибавляется проблема воспроизводимости). Несовпадение результатов, предоставляемых машинами, может приводить к неточным результатам сравнения в пределах одного поля. Так, например, машина, контрольное устройство урожайности которой отклонено в положительную сторону, будет предоставлять более высокие показатели урожайности, чем машина, контрольное устройство которой не смещено (или смещено отрицательно). Как следствие, при вычислении показателей рентабельности инвестиций на основе поля или зоны могут быть представлены отличия, возникшие скорее вследствие плохой калибровки, нежели вследствие истинного отклонения значений урожайности.
На фиг. 3 показаны некалиброванные точки данных об урожайности, полученные от двух машин с поля 300 в одинаковых условиях. Позициями 310A, 320А, 330А, 340А, 350А, 360А и 370А обозначены линии некалиброванных данных об урожайности, собранные первой машиной (например, машиной 102 и/или орудием 104, прикрепленным к машине 102), а позициями 310В, 320В, 330В, 340В, 350В, 360В и 370В обозначены линии некалиброванных данных об урожайности, собранные второй машиной (например, машиной 102 и/или орудием 104, прикрепленным к машине 102). Каждая линия данных об урожайности содержит множество точек данных об урожайности. На фиг. 3 проиллюстрирован особенно интересный случай вариабельности показателей машины. Позицией 301 обозначена светло-серая линия данных, представляющих 38-45 бушеля/акр, собранных первой машиной, а позицией 303 обозначена темно-серая линия данных, представляющих 22-31 бушеля/акр, собранных второй машиной. В направлении левого края поля 300 линии данных об урожайности, собранных первой и второй машинами, чередуются по производительности, представляя значительную корреляцию между машиной и точками данных об урожайности. С поля 300 две машины получили средние значения, которые значительно отличаются друг от друга: среднее значение для точек данных об урожайности, собранных первой машиной, составило 38,38, а среднее значение для точек данных об урожайности, собранных второй машиной, составило 30,71. Из простого t-теста следует, что два набора точек данных об урожайности получены из разных распределений (Т=-6,2596, р<10е-10). Зрительно при полной калибровке любые две соответствующие линии данных об урожайности (точки данных об урожайности, собранные двумя разными машинами), проходящие через одну и ту же зону управления в одинаковых условиях, должны иметь одинаковый цвет.
Такие проблемы с вариабельностью показателей машин можно решить калибровкой точек данных об урожайности, собранных первой и второй машинами. Калибровка может предусматривать вычисление статистических значений по точкам данных об урожайности, собранным первой и второй машинами, и корректировку точек данных об урожайности, собранных первой и второй машинами, на основании вычисленных статистических значений.
Анализ конфигурации
На фиг. 1 показана функциональная схема вычислительной среды в соответствии с одним вариантом осуществления, включающей сельскохозяйственную технику, движущуюся по полю. Вычислительная среда 100 содержит машину 102, орудие 104, совместимое с локальной сетью контроллеров (CAN) устройство 106, портативный компьютер 108, внешний компьютер 120, внешние источники 130 данных и сервер 150 электронных записей о сельскохозяйственной деятельности. Портативный компьютер 108, внешний компьютер 120, внешние источники 130 данных и сервер 150 электронных записей о сельскохозяйственной деятельности содержат вычислительные устройства, которые могут быть установлены на расстоянии друг от друга, но могут при этом быть соединены с возможностью передачи данных по сети 110. Сеть 110 представляет собой обычную интернет-сеть, но также может быть любой сетью, включая, кроме прочего, LAN, MAN, WAN, мобильную проводную или беспроводную сеть, частную сеть, частную виртуальную сеть или их комбинацию.
С помощью машины 102 пользователь (например, фермер и/или сельскохозяйственное предприятие) может высаживать, убирать, обрабатывать урожай и выполнять с ним любые другие действия. Машина 102 собирает, хранит и предоставляет для общего пользования данные о сельскохозяйственной деятельности, созданные машиной 102 и/или орудием 104. К примерам данных о сельскохозяйственной деятельности относится информация о типе и разновидностях урожая, информация о засевании, информация об использовании химических веществ (например, информация об использовании удобрения, пестицидов и т.д.), химический состав почвы, информация об использовании топлива для машины 102 и/или орудия 104, метеорологическая информация, информация о рельефе местности и изображения (например, изображения, сделанные со спутника, самолета и т.д.). Данные о сельскохозяйственной деятельности составляют в соответствии с характеристиками поля, например, точками данных об урожайности. Точки данных об урожайности содержат текущую информацию с поля (например, в бушелях на акр [бушель/акр]).
Далее в описании раскрываются точки данных об урожайности, однако на практике методы калибровки и любые другие операции, описанные в настоящем документе, также могут выполняться для любого вида данных о сельскохозяйственной деятельности, собранных машиной 102 или орудием 104, и также к ним применимы.
Машина 102 (или орудие 104, устройство 106, компьютер 108 или сервер 150) вносит изменения в точки данных об урожайности, добавляя один или несколько атрибутов, таких, например, как информация об идентификаторе машины, уточняющем машину 102, и идентификатор влажности, описывающий содержание влаги, связанное с точками данных об урожайности. Информация касательно идентификатора машины, идентификатора зоны, идентификатора локализованной зоны и идентификатора влажности может быть включена в метаданные точек данных об урожайности. Машина 102 оборудована компьютерными системами и контроллерами. К примерам машин 102 относятся тракторы, сеялки и уборочные комбайны, а также машины, необязательно связанные с сельским хозяйством, например, летающие дроны на дистанционном управлении.
Машина 102 соединена с орудием 104 посредством бортовой шины 103. Несмотря на то, что на фиг. 1 машина 102 показана соединенной с одним орудием 104, на практике к машине 102 может быть присоединено несколько орудий 104. Бортовая шина 103 может работать по стандарту Сообщества автомобильных инженеров (SAE) J1939. Стандарт SAE J1939 используется для обеспечения связи между орудием 104 и машиной 102 и выполнения диагностики. Более конкретно, бортовая шина 103 может представлять собой CAN-шину. CAN-шина может работать в соответствии со стандартом Международной организации по стандартизации (ISO) 11783, известном как «Тракторы и машины для сельского и лесного хозяйств: последовательная сеть управления и передачи данных». ISO 11783 - это протокол передачи данных, широко используемый в сельском хозяйстве и основанный на SAE J1939. Однако в соответствии с другими вариантами осуществления бортовая шина 103 может работать с использованием альтернативного механизма обмена данными, такого как проводная сеть Ethernet и протокол управления передачей данных по сети, такой как TCP/IP.
Орудием 104 может быть любой сельскохозяйственный механизм, предназначенный для использования на ферме для упрощения сельскохозяйственных операций. Орудия 104 можно использовать для возделывания почвы, высадки растений, внесения удобрений, борьбы с вредителями, орошения, уборки урожая или его послеуборочной обработки, и/или сортировки урожая. Орудие 104 собирает точки данных об урожайности и передает собранные точки данных об урожайности на машину 102 по бортовой шине 103.
Машина 102 соединена с CAN-устройством 106 с возможностью передачи данных через CAN-шину 105. CAN-устройство 106 выполнено с возможностью интерпретирования сообщений от бортовой шины 103 и их преобразования для интерпретирования портативным компьютером 108 и сервером 150 электронных записей о сельскохозяйственной деятельности для использования в системе 160 калибровки. Также CAN-устройство 106 соединено с возможностью передачи данных с портативным компьютером 108. CAN-устройство 106 получает от машины 102 по CAN-шине 105 измененные точки данных об урожайности, обрабатывает полученные измененные точки данных об урожайности и передает обработанные точки данных об урожайности на портативный компьютер 108.
Согласно другим конфигурациям либо орудие 104 или машина 102, собирающая данные, либо CAN-устройство 106 может быть соединено с возможностью передачи данных непосредственно с портативным компьютером 108 или сервером 150 по сети 110. Согласно этим конфигурациям эти компоненты передают обработанные точки данных об урожайности непосредственно на сервер 150 электронных записей о сельскохозяйственной деятельности, исключая необходимость в промежуточных устройствах, таких как CAN-устройство 106 или портативный компьютер 108. Например, или орудие 104, или машина 102 может содержать устройство беспроводной связи для осуществления связь по сети 110.
Согласно другим конфигурациям либо орудие 104 или машина 102, либо внешние источники 130 данных, собирающие или иным образом получающие данные, могут быть соединены с возможностью передачи данных непосредственно на сервер 150. Согласно этим конфигурациям эти компоненты передают точки данных об урожайности и/или информацию, собранную из источников данных, внешних по отношению к орудию 104 и/или машине 102, непосредственно на сервер 150 электронных записей о сельскохозяйственной деятельности, исключая необходимость в промежуточной сети 110. Например, орудие 104, машина 102 или внешний источник 130 данных может содержать интерфейс проводной связи (например, интерфейс универсальной последовательной шины [USB]), с помощью которого можно связываться с сервером 150 электронных записей о сельскохозяйственной деятельности.
Портативный компьютер 108 позволяет пользователю (например, фермеру и/или представителю сельскохозяйственного предприятия) взаимодействовать с обработанными точками данных об урожайности, полученными от CAN-устройства 106. С помощью портативного компьютера 108 и внешнего компьютера 120 пользователи могут получать доступ к данным, хранящимся на сервере 150, и взаимодействовать с ними. Примеры портативного компьютера 108 и внешнего компьютера 120 включают персональный компьютер, ноутбук, карманный персональный компьютер, сотовый телефон, мобильный телефон или смартфон.
Внешние источники 130 данных предоставляют информацию, собранную из источников данных, внешних по отношению к машине 102 и/или орудию 104. Примеры внешних источников 130 данных включают метеорологические станции, географические информационные системы (GIS), базы данных изображений (например, базы данных изображений со спутника, базы данных изображений, полученных с летательных аппаратов, и т.п.) и т.д. Эти источники данных могут включать пространственно изменяющиеся данные (такие как пространственно изменяющиеся изображения со спутника полей, по которым перемещается машина 102) и, таким образом, могут предоставлять подробные данные, которые характеризуются таким же или аналогичным пространственным разрешением, что и точки данных об урожайности, собранные машиной 102.
Сервер 150 электронных записей о сельскохозяйственной деятельности обрабатывает точки данных об урожайности, полученные от портативного компьютера 108, вместе с информацией, полученной от внешних источников 130 данных. Например, сервер 150 электронных записей о сельскохозяйственной деятельности обрабатывает точки данных об урожайности, полученные от портативного компьютера 108, добавляя один или несколько атрибутов, таких как идентификатор зоны, описывающий зону в поле, и идентификатор локализованной зоны, описывающий локализованную зону в поле. Сервер 150 электронных записей о сельскохозяйственной деятельности содержит систему 160 калибровки. Система 160 калибровки выполняет калибровку точек данных об урожайности.
На фиг. 2 показана система 160 калибровки в соответствии с одним вариантом осуществления. Система 160 калибровки содержит приемник 202, модуль 210 вычисления, модуль 220 калибровки по окрестности, модуль 230 калибровки по доверительному значению, послекалибровочный модуль 240 и модуль 250 вывода. На приемник 202 поступает множество групп точек данных об урожайности и любые другие данные, используемые для выполнения калибровки данных, включая данные от внешних источников 130 данных. Модуль 250 вывода выводит откалиброванные точки данных об урожайности. В целом приемник 202 передает точки данных об урожайности на один или несколько других модулей, показанных на фиг. 2, что, в свою очередь, предусматривает их вывод на модуль 250 вывода для хранения в хранилище 170 данных и предоставления пользователю. Кроме того, при необходимости эти отдельные модули могут передавать данные друг другу для калибровки или в зависимости от комбинации или порядка расположения разных модулей для полной калибровки. Точные калибровки, выполняемые в любом заданном варианте реализации, могут отличаться, вследствие чего упорядочивание и передача данных между модулями также может отличаться в зависимости от варианта реализации.
Модуль 210 вычисления вычисляет суммарную урожайность на основании точек данных об урожайности, полученных от приемника 202. Модуль 210 вычисления содержит модуль 212 вычисления общей суммарной урожайности и модуль 214 вычисления суммарной урожайности по группе. Модуль 212 вычисления общей суммарной урожайности вычисляет общую суммарную урожайность на основании точек данных об урожайности множества групп. Согласно другим конфигурациям общая суммарная урожайность представляет собой общую среднюю урожайность, а согласно другим конфигурациям общая суммарная урожайность представляет собой общую медианную урожайность. Модуль 214 вычисления суммарной урожайности по группе вычисляет суммарную урожайность по группе на основании точек данных об урожайности группы. В следующих разделах будет описано, за счет разбивки чего образуется группа относительно каждого отдельного вида калибровки. Согласно другим конфигурациям суммарная урожайность по группе представляет собой среднюю урожайность по группе, а согласно другим конфигурациям суммарная урожайность по группе представляет собой медианную урожайность по группе.
Модуль 220 калибровки по окрестности определяет набор точек данных об урожайности, содержащий точки данных об урожайности в пределах порогового расстояния от точки данных об урожайности. Модуль 220 калибровки по окрестности выполняет калибровку точек данных об урожайности на основании набора точек данных об урожайности с получением точки данных об урожайности, откалиброванной по окрестности.
На модуль 230 калибровки по доверенному значению поступает доверительное значение вместе с атрибутами, связанными с точками данных об урожайности, и в нем на основании полученного доверительного значения выполняется калибровка точек данных об урожайности группы. Послекалибровочный модуль 240 получает доступ к заданному корректировочному значению для группы, причем заданное корректировочное значение связано с атрибутом. Послекалибровочный модуль 240 выполняет корректировку каждой откалиброванной точки данных об урожайности по заданному корректировочному значению. Заданное корректировочное значение представляет собой число, процентную величину или их комбинацию.
II. Начальная калибровка
Метод начальной калибровки предусматривает следующие операции.
1. Поступление на приемник 202 групп точек данных об урожайности по каждому полю, причем каждая группа связана с атрибутом, таким как, например, идентификатор машины.
2. Вычисление модулем 212 вычисления общей суммарной урожайности общего (сводного) среднего объема урожая на основании точек данных об урожайности групп.
3. Группировка модулем 210 вычисления точек данных об урожайности в соответствии с идентификатором машины.
4. Для каждой группы (например, машины, орудия):
а) вычисление модулем 214 вычисления суммарной урожайности по группе среднего объема урожая по группе на основании точек данных об урожайности группы;
б) вычитание модулем 210 вычисления среднего объема урожая по группе для каждой точки данных об урожайности группы с получением скорректированных точек данных об урожайности;
в) прибавление модулем 210 вычисления общего среднего объема урожая к каждой скорректированной точке данных об урожайности с получением откалиброванных точек данных об урожайности.
На фиг. 3 показаны некалиброванные точки данных об урожайности, полученные от двух машин с поля 300, а на фиг. 4 показаны откалиброванные точки данных об урожайности, полученные посредством метода начальной калибровки с поля 400. На фиг. 4 позициями 410A, 420А, 430А, 440А, 450А, 460А и 470А обозначены линии откалиброванных данных об урожайности, собранных первой машиной и откалиброванных методом начальной калибровки, а позициями 410В, 420В, 430В, 440В, 460В и 470В обозначены линии откалиброванных данных об урожайности, собранных второй машиной и откалиброванных методом начальной калибровки. Каждая линия данных об урожайности содержит множество точек данных об урожайности. Линии данных об урожайности, проходящие рядом друг с другом (линии данных об урожайности, полученные от первой машины, и линии данных об урожайности, полученные от второй машины), имеет большее сходство (подобные оттенки серого), что свидетельствует об улучшении, даже несмотря на отсутствие учета пространственных факторов во время выполнения метода начальной калибровки. Линии данных об урожайности также демонстрируют намного меньшую корреляцию с машиной (т.е. менее цикличные возрастание и падения значений).
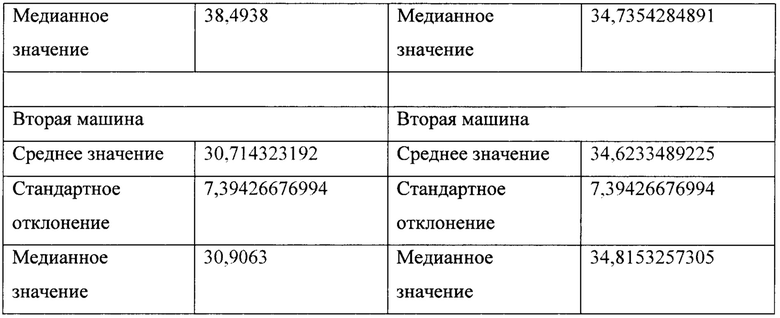
В таблице 1 показан набор ключевых статистических значений для наборов некалиброванных и откалиброванных данных, как показано на фиг. 3 и фиг. 4 соответственно. Каждый набор некалиброванных и откалиброванных данных содержит статистические значения об общей (сводной) урожайности, полученные как от первой, так и от второй машины, а также от первой машины и от второй машины отдельно. Статистические данные набора откалиброванных данных определяют на основании точек данных об урожайности, откалиброванных методом начальной калибровки. Общее среднее и общее медианное значения наборов некалиброванных и откалиброванных данных почти эквивалентны, хотя стандартное отклонение набора откалиброванных данных существенно ниже, чем стандартное отклонение набора некалиброванных данных. Поскольку два распределения от двух машин сведены ближе друг к другу, разброс между неперекрывающимися «хвостами» каждого распределения уменьшен. Другими словами, в результате калибровки некалиброванных точек данных об урожайности стандартное отклонение точек данных об урожайности уменьшается. Среднее и медианное значения набора некалиброванных данных, полученных от первой машины, существенно выше, чем среднее и медианное значения набора откалиброванных данных, полученных от первой машины. Аналогично среднее и медианное значения набора некалиброванных данных, полученных от второй машины, существенно ниже, чем среднее и медианное значения набора откалиброванных данных, полученных от второй машины.
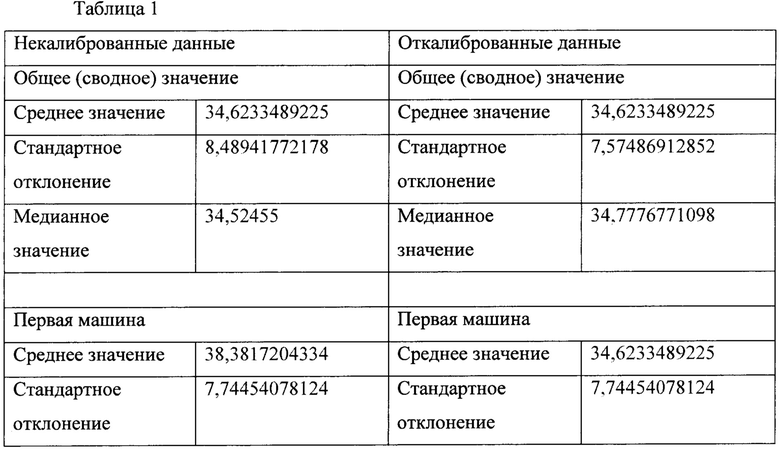
Критерий однофакторного дисперсионного анализа (ANOVA) демонстрирует существенное статистическое расхождение между данными, полученными от двух машин, перед калибровкой (F=5565,03, р<0,0001), при этом после калибровки статистическое расхождение отсутствует (F<10е-8, р>0,9999).
III. Выпадающие значения
Выпадающие значения могут сильно повлиять на результаты анализа данных. Выпадающие значения могут возникать в точках данных об урожайности из-за множества факторов, таких как задержка при начальном и конечном прохождении машины, неисправность машины/орудия, поворот машины и т.п. Один из способов по устранению влияния выпадающих значений заключается в использовании вместо среднего значения медианного значения при вычислениях, описанных в методе начальной калибровки. Медианные значения используются вместо средних значений, когда данные распределены неравномерно. Медианные значения менее подвержены влиянию статистических выпадающих значений, чем средние значения, в особенности для меньших наборов данных.
Метод устранения выпадающих значений предусматривает описанные ниже действия.
1. Поступление на приемник 202 групп точек данных об урожайности по каждому полю, причем каждая группа связана с атрибутом, таким как, например, идентификатор машины.
2. Вычисление модулем 212 вычисления общей суммарной урожайности общего (сводного) медианного объема урожая на основании точек данных об урожайности групп.
3. Группировка модулем 210 вычисления точек данных об урожайности в соответствии с идентификатором машины.
4. Для каждой группы (например, машины, орудия):
а) вычисление модулем 214 вычисления суммарной урожайности по группе медианного объема урожая по группе на основании точек данных об урожайности группы;
б) вычитание модулем 210 вычисления медианного объема урожая по группе для каждой точки данных об урожайности группы с получением скорректированных точек данных об урожайности;
в) прибавление модулем 210 вычисления общего медианного объема урожая к каждой скорректированной точке данных об урожайности с получением откалиброванных точек данных об урожайности.
На фиг. 5 показаны некалиброванные данные об урожайности, собранные двумя машинами с поля 500. На фиг. 5 показан аналогичный набор данных, как показано на фиг. 3, с некоторыми чрезвычайно большими точками данных об урожайности (линия 520А данных об урожайности), прибавленными к точкам данных об урожайности, собранным первой машиной, для моделирования выпадающих значений (крайняя темно-серая линия слева вверху), обозначенных позицией 501. Позиции 510А, 520А, 530А, 540А, 550А, 560А и 570А обозначают некалиброванные линии данных об урожайности, собранных первой машиной, а позиции 510В, 520В, 530В, 540В, 560В и 570В обозначают некалиброванные линии данных об урожайности, собранных второй машиной. Каждая линия данных об урожайности содержит множество точек данных об урожайности. На фиг. 6 показаны откалиброванные точки данных об урожайности, полученные методом начальной калибровки, а на фиг. 7 показаны откалиброванные точки данных об урожайности, полученные методом устранения выпадающих значений. На фиг. 6 позициями 610А, 620А, 630А, 640А, 650А, 660А и 670А обозначены линии откалиброванных данных об урожайности, собранных первой машиной и откалиброванных методом начальной калибровки, а позициями 610В, 620В, 630В, 640В, 660В и 670В обозначены линии откалиброванных данных об урожайности, собранных второй машиной и откалиброванных методом начальной калибровки. На фиг. 7 позициями 710А, 720А, 730А, 740А, 750А, 760А и 770А обозначены линии откалиброванных данных об урожайности, собранных первой машиной и откалиброванных методом устранения выпадающих значений, а позиции 710В, 720В, 730В, 740В, 760В и 770В обозначают линии откалиброванных данных об урожайности, собранных второй машиной и откалиброванных методом устранения выпадающих значений.
Как показано на фиг. 6, выпадающие значения могут создавать преувеличенное общее среднее значение (которое сильно завышает точки данных об урожайности, полученные от второй машины), а также преувеличенное локальное среднее значение (которое сильно занижает точки данных об урожайности, полученные от первой машины). Точки данных об урожайности на фиг. 6 демонстрируют противоположность намеченной цели: линии, проходящие рядом друг с другом, не характеризуются одним цветом. Калибровка, описанная в методе устранения выпадающих значений, может быть более подходящей в случаях, в которых предполагается, что данные включают выпадающие значения, как показано на фиг. 5-7.
IV. Разбиение данных
Предположение, сделанное в методах начальной калибровки и устранения выпадающих значений, заключается в том, что распределение точек данных об урожайности между множеством машин идентично (если предположить, что машины работают в одной области и в одинаковых условиях), однако это не всегда справедливо, поскольку урожайность может существенно отличаться в зависимости от других факторов, таких как зоны управления. Согласно одному примеру плодородие почвы для зон управления отличается, результатом чего может быть действительное отклонение показателей, которое не стоит усреднять, если у двух машин отличаются области действия зон управления. Продолжая пример, пользователь (например, фермер и/или представитель сельскохозяйственного предприятия) может намеренно изменять нормы внесения удобрений в различных областях поля (например, на контрольных полосах). Согласно этому примеру ожидаемое отклонение данных об урожайности не следует относить на счет проблем с калибровкой, особенно в случае корреляции между этими отклонениями и областью действия машины (например, одна машина собирает урожая на контрольной полосе, а другие машины собирают урожай в областях рядом с контрольной полосой). Другой пример связан с датой: если две машины работают на одной зоне в разные периоды времени только с частичным перекрытием, то отклонение данных об урожайности, связанное с датой сбора урожая, не следует калибровать. Согласно одному примеру для машин, которые работают в областях с более высокой влажностью, иногда характерна передача более высоких значений точек данных об урожайности. На фиг. 8А показаны некалиброванные данные об урожайности, собранные двумя машинами с поля 800, а на фиг. 8В показано содержание влаги поля 800 согласно фиг. 8А. Согласно одному примеру значение содержания влаги, показанное на фиг. 8В, может быть собрано двумя машинами, которые собирают данные об урожайности с поля 800 согласно фиг. 8А. Согласно другому приведенному в качестве примера варианту осуществления значение содержания влаги может поступать из внешнего источника данных (например, внешнего источника 130 данных). Как показано на фиг. 8В, уровни влажности значительно изменяются по всему полю 800, а значит области с более высокой влажностью обычно соответствуют более высоким значениям некалиброванных точек данных об урожайности, как показано на фиг. 8А.
На фиг. 8А показано, что другие переменные, помимо калибровки точек данных об урожайности, играют свою роль, причем они могут повлиять на анализ, если не обеспечить контроль над ними. Один из способов контроля над влиянием переменных заключается в поддержании переменных постоянными во время калибровки. Исходя из примера, относящегося к зонам управления, калибровка всех точек данных об урожайности в первой зоне происходит отдельно от всех точек данных во второй зоне и т.д. Один из методов предусматривает дискретизацию точек данных об урожайности и калибровку по отдельности для каждой полученной в результате точки данных об урожайности. Другими словами разбиение точек данных об урожайности на множество групп и расчет/калибровку по каждой группе по отдельности.
Пользователь может задавать атрибуты, такие как, например, идентификаторы зоны, перечень атрибутов, таких, например, как идентификаторы зоны, связанные с отдельными уровнями влажности, и функцию значений атрибута, такую, например, как пользовательская функция дискретизации для уровней влажности. Эти атрибуты остаются постоянными для каждой операции калибровки. На фиг. 9А показан результат калибровки без разбиения. На фиг. 9В показан результат калибровки после разбиения данных на шесть зон влажности в соответствии с данными о содержании влаги, показанными на фиг. 8В.
Поскольку каждая машина имела приемлемо одинаковую область действия в каждой зоне, влияние этого изменения еле заметно. Однако, пара мест, заслуживающих внимания, отмечена (темно-серым цветом) на фиг. 9В. При калибровке без разбиения, как показано на фиг. 9А, значения точек данных об урожайности, полученные от двух машин, сводятся ближе друг к другу, даже несмотря на то, что определенное содержание влаги, как показано на фиг. 8В, записанное двумя машинами, заметно отличается (возможно, из-за близости края поля). В отличие от этого, вариант с разбиением, как показано на фиг. 9В, предусматривает калибровку зон с разной влажностью по отдельности, результатом чего является то, что внешний закругленный участок 910 подвергается калибровке с получением более низкой урожайности, чем внутренний закругленный участок 920.
Метод разбиения данных предусматривает описанные ниже действия.
1. Поступление на приемник 202 групп точек данных об урожайности по каждому полю, причем каждая группа связана с одним или несколькими атрибутами, такими как, например, идентификатор машины, идентификатор зоны, идентификатор локализованной зоны и идентификатор влажности.
2. Поступление на приемник 202 атрибута (атрибутов) и/или функции (функций) атрибутов для поддержания их значения постоянным.
3. Разбиение модулем 210 вычисления точек данных об урожайности на группы в соответствии с поступившим атрибутом (атрибутами).
4. Выполнение методов начальной калибровки и/или устранения выпадающих значений с использованием точек данных об урожайности, подвергнутых разбиению.
V. Калибровка на основании сетки
Предположение, сделанное в методах начальной калибровки, устранения выпадающих значений и разбиения данных, заключается в том, что все машины в целом предоставляют для общего пользования аналогичные распределения данных об урожайности. Это предположение основывается на внутреннем предположении, которое заключается в том, что каждая машина действует в областях с одинаковой урожайностью. В примере, представленном в разделе о разбиении данных, это предположение справедливо: обе машины характеризуются областью действия по всему полю и, таким образом, подвергаются воздействию факторов всех продуктивных зон. Однако на карте области действия машины, показанной на фиг. 10, представлена приведенная в качестве примера ситуация, согласно которой это предположение не является справедливым. Как показано на фиг. 10, две машины работают в сильно отличающихся областях поля 1000. Позициями 1010А, 1020А и 1030А обозначена область действия первой машины, а позициями 1010В и 1020В обозначена область действия второй машины. Таким образом, можно ожидать одинакового распределения между двумя машинами, если поле характеризуется относительно равномерной урожайностью по всей площади. Однако это не всегда справедливо, особенно для больших полей, и противоречит предположению о вариабельности параметров поля, которое лежит в основании управления зонами. На фиг. 11A показаны некалиброванные точки данных об урожайности для поля 1000 согласно фиг. 10, подтверждающие концепцию вариабельности урожайности: южная половина поля 1000 (включая позицию 1030А и некоторую часть 1020В) характеризуется более высокой урожайностью, чем северная половина поля 1000 (включая позиции 1010A, 1010В, 1020А и некоторую часть 1020В). В заключение, ожидается, что параметры поля изменяются в пространстве, и в случаях, если машины работают на разных участках, текущие методы калибровки могут не подходить.
Чтобы убедиться в том, почему методы начальной калибровки, устранения выпадающих значений и разбиения данных недостаточно подходят для таких случаев, рассмотрим некалиброванные точки данных об урожайности для поля 1000 согласно фиг. 10, показанные на фиг. 11А. Помимо различий в продуктивности областей, существует проблема с калибровкой, поскольку границы карты области действия машины (показанной на фиг. 10) видны в некалиброванных данных об урожайности в северной половине поля 1000, как показано на фиг. 11А. Некалиброванные данные об урожайности, показанные на фиг. 11А, предполагают, что первая машина (работающая в областях 1010В и 1020В, как показано на фиг. 10) измеряет более высокие значения точек данных об урожайности, чем вторая машина (работающая в областях 1010А, 1020А и 1030А, как показано на фиг. 10) на аналогичной площади (северная половина поля 1000). Следует уменьшить точки данных об урожайности, полученные от первой машины, или следует увеличить точки данных об урожайности, полученные от второй машины. На фиг. 11В показаны результаты калибровки, осуществляемой описанными методами (например, методами начальной калибровки, устранения выпадающих значений или разбиения данных) на некалиброванных точках данных об урожайности, показанных на фиг. 11А. При внимательном изучении фиг. 11В можно увидеть интересный и нежелательный результат: за счет более высокой урожайности в южной половине поля 1000, показанной на фиг. 10, на которой работает вторая машина, общее сводное значение по полю становится выше, чем у первой машины, и, таким образом, ее значения точек данных об урожайности снижаются после калибровки, а у первой машины - увеличиваются. Другими словами, наблюдается противоположный желаемому результат, и границы области действия машины становятся еще более выраженными. Этот пример подчеркивает влияние пространственного отклонения, поэтому чтобы исправить эти ситуации, необходимо усовершенствовать методы калибровки.
Метод разбиения данных показал, что определенные переменные (например, содержание влаги) можно контролировать за счет осуществления нескольких калибровок и поддерживать постоянными для каждой калибровки. Переменная, представляющая интерес, показанная на фиг. 10 и 11А-В, представляет собой место расположения, которое сохраняется постоянным в нескольких калибровках. Иными словами, вместо выполнения калибровки по всему полю, можно выполнить множество локализованных калибровок.
Существует некоторое количество потенциальных стратегий по выбору локализованных зон для выполнения калибровки. Зоны управления представляют собой один из вариантов выбора, а согласно одному варианту осуществления реализуют разбиение с использованием зон управления, используя функциональные возможности метода разбиения данных, при условии, что каждая точка данных об урожайности связана с идентификатором зоны. Однако информация о зоне не всегда доступна. Кроме того, в пределах зоны в ряде полей наблюдается вариабельность, особенно для зон, многоугольные участки которых распределены по большим площадям. Следовательно, также предоставляется более надежное решение для калибровки, которое не зависит от зон управления для локализованной калибровки.
Вариабельность, возникающая между многоугольными участками с одинаковым идентификатором зоны, может быть устранена путем независимой калибровки каждого многоугольного участка. Однако условия в отношении минимального размера многоугольного участка зоны управления отсутствуют, и методы калибровки, описанные в настоящем документе, зависят от размера выборки, который обычно более подвержен влиянию смещения и выпадающих значений. Таким образом, небольшие многоугольные участки зоны управления могут больше подходить для локализованной калибровки.
Один из методов предусматривает наложение сетки на поле и независимую калибровку каждой ячейки в сетке. На фиг. 12А показаны некалиброванные точки данных об урожайности согласно фиг. 11А с наложенной сеткой. На фиг. 11В показана делокализованная калибровка, а на фиг. 12В показан результат калибровки каждой ячейки сетки на фиг. 12А по отдельности. Границы области действия машины, видимые на фиг. 11В, менее явно выражены на фиг. 12В. Как показано на фиг. 12В, урожайность, характерная для первой машины, уменьшается в северной половине поля 1000 (уменьшение, показанное светло-серым цветом сверху и снизу), а урожайность, характерная для второй машины, увеличивается (увеличение от темно-серого цвета до более светло-серого цвета в середине северной половины). Таким образом, локализованная калибровка является целесообразным вариантом для устранения влияния вариабельности параметров поля по сравнению с ранее описанными методами (методами начальной калибровки, устранения выпадающих значений и разбиения данных).
Метод калибровки по сетке предусматривает выполнение описанных ниже действий.
1. Поступление на приемник 202 групп точек данных об урожайности по каждому полю, причем каждая группа связана с одним или несколькими атрибутами, такими, например, как идентификатор машины и идентификатор локализованной зоны.
2. Разделение модулем 210 вычисления точек данных об урожайности на локализованные зоны на основании идентификаторов локализованных зон.
3. Выполнение методов начальной калибровки и/или устранения выпадающих значений на точках данных об урожайности для каждой локализованной зоны.
VI. Калибровка по окрестности
Метод калибровки по сетке устраняет отрицательное влияние вариабельности по всему полю. Однако этот метод привносит собственное пространственное искажение. На фиг. 12А конкретный участок выделен черной окружностью 1201. На фиг. 11В показаны точки данных об урожайности, откалиброванные с использованием одного или нескольких методов начальной калибровки, устранения выпадающих значений и разбиения данных, а на фиг. 12В показаны точки данных об урожайности, откалиброванные методом калибровки по сетке. На фиг. 12В показан темно-серый участок возле центра окружности 1203, который более явно выражен, чем соседние участки. Одна из причин возникновения этого связана с ячейкой сетки, в которой расположены точки данных об урожайности: другие точки данных об урожайности для этой конкретной машины явно выражены в этой ячейке сетки, и, соответственно, эти точки данных об урожайности уменьшаются. Поскольку участок, выделенный окружностью 1201, показанной на фиг. 12А, характеризуется низкой урожайностью, результатом является корректировка ячейки сетки до еще более низких значений урожайности, как показано на фиг. 12В. Однако корректность такой калибровки вызывает вопросы, учитывая, что этот небольшой участок, выделенный окружностью 1203, как показано на фиг. 12В, присоединен к более крупному участку, характеризующемуся аналогичной низкой продуктивностью (ячейка сетки справа, как показано на фиг. 12А). Однако из-за разделительных линий ячейки сетки, эти смежные точки не принимаются во внимание при калибровке конкретной ячейки сетки.
Возможным вариантом устранения этого влияния является уменьшение размера ячеек сетки, чтобы свести к минимуму расстояние между центром и краем ячейки сетки. Это решение является простым, но ему не хватает надежности по двум причинам:
1) большие размеры ячеек сетки являются предпочтительными в описанных методах (например, в методах начальной калибровки, устранения выпадающих значений и разбиения данных), и это может ограничивать минимальный размер рассматриваемой ячейки сетки, особенно, если точки данных об урожайности разбросаны (например, из более высокой скорости движения машин);
2) калибровка выполняется путем устранения несоответствий между значениями точек данных об урожайности множества машин. Таким образом, область действия по меньшей мере двух машин в ячейках сетки дает желаемые результаты. Уменьшение размера ячеек сетки снижает вероятность перекрытия областей действия нескольких машин; в крайнем случае, размер ячейки сетки может быть уменьшен таким образом, что перекрытие будет отсутствовать (и, таким образом, описанные методы, например, начальной калибровки, устранения выпадающих значений и разбиения данных, не оказывают никакого действия).
Предположив, что значение калибровки для конкретной точки данных об урожайности должно быть основано на значениях точек данных об урожайности ее ближайших соседних участков, возможным методом калибровки является калибровка по точкам.
Метод калибровки по окрестности предусматривает выполнение описанных ниже действий.
1. Поступление на приемник 202 групп точек данных об урожайности по каждому полю, причем каждая группа связана с атрибутом, таким как, например, идентификатор машины.
2. Для каждой точки данных об урожайности (Р):
а) определение модулем 220 калибровки по окрестности набора точек данных об урожайности, содержащего точки данных об урожайности, описывающие окрестность (N) точки данных об урожайности Р. Например, окрестность N точки Р данных об урожайности может содержать все точки в пределах порогового расстояния от точки Р данных об урожайности;
б) калибровка модулем 220 калибровки по окрестности точки Р данных об урожайности с использованием набора точек данных об урожайности {Р}+N с получением точки данных об урожайности, откалиброванной по окрестности.
4. Выполнение методов начальной калибровки и/или устранения выпадающих значений с использованием точек данных, откалиброванных по окрестности.
Другим словами, каждая точка данных об урожайности становится центром своей собственной калибровки.
На фиг. 11В показаны откалиброванные точки данных об урожайности, полученные методами начальной калибровки, устранения выпадающих значений и/или разбиения данных, а на фиг. 12В показаны откалиброванные точки данных об урожайности, полученные методом калибровки по сетке, и на фиг. 13 показаны откалиброванные точки данных об урожайности, полученные методом калибровки по окрестности с пороговым расстоянием, составляющим 30 метров. Калибровка по окрестности, показанная на фиг. 13, демонстрирует результаты, аналогичные калибровке по сетке, показанной на фиг. 12В, однако при калибровке по окрестности уменьшаются локальные искажения, привносимые при калибровке по сетке, причем это показано путем сравнения конкретного выделенного участка, обозначенного черной окружностью 1203 на фиг. 12В, и конкретного участка, выделенного черной окружностью 1301 на фиг. 13.
Хотя преимущества калибровки по окрестности очевидны, существует основной недостаток, который сохраняет уместность метода калибровки по сетке: вычислительные затраты на калибровку по окрестности существенно выше, чем вычислительные затраты на калибровку по сетке. Количество калибровок, выполняемых в методах калибровки по сетке, равняется G, где G - количество ячеек сетки, а количество калибровок, выполняемых в методах калибровки по окрестности, равняется М, где М - количество точек данных об урожайности. Для приемлемых размеров ячейки сетки G будет на несколько порядков меньше, чем М. Кроме того, определение соседних точек данных об урожайности для одной точки данных об урожайности также связано с высокими вычислительными затратами, с моделированием с использованием операции, выполняемой за линейное время, в самом худшем случае. Если рассматривать алгоритм действия, методы калибровки по окрестности увеличивают время выполнения калибровки от линейного к квадратичному, что означает, что отношения между временем выполнения двух методов калибровки, то есть калибровки по окрестности и калибровки по сетке, будет увеличиваться по мере увеличения количества точек данных. Следовательно, хотя калибровка по окрестности представляет собой наиболее подтверждаемую калибровку, калибровка по сетке может представлять достаточное приближение в ситуациях, когда передача результатов строго ограничена во времени.
VII. Калибровка по доверительному значению
В описанных методах (например, методах начальной калибровки, устранения выпадающих значений, разбиения данных, калибровки по сетке и калибровки по окрестности) применяется корректировочное значение к каждой машине в наборе данных. В пределах зоны калибровки значения машин с более высокой наблюдаемой урожайностью уменьшаются, а значения машин с более низкой наблюдаемой урожайностью - увеличиваются. Согласно одному варианту осуществления калибровка представляет собой устранение отклонений между машинами. Калибровка относится к устранению несоответствий в измерениях в соответствии с известным стандартом. Корректировка точек данных об урожайности для установления соответствия с объемом, измеренным по весу, представляет собой более подходящий пример калибровки.
Согласно одному примеру известен поднабор откалиброванных машин. Например, предположим, что имеется две машины - первая машина и вторая машина, причем первая машина характеризуется более высокой урожайностью, чем вторая машина. Если существует более высокий уровень доверия, что значение первой машины является точным (например, на основании предыдущей калибровки или благодаря более точной машине или орудию), то значения, полученные второй машиной, могут быть откорректированы в соответствии со значениями, полученными первой машиной, вместо корректировки каждого результата в одинаковой степени по некоторому усредненному значению из двух. Например, значениям, получаемым первой машиной, может быть присвоен более высокий весовой коэффициент (например, они могут быть умножены на 2), а значениям, получаемым второй машиной, может быть присвоен более низкий весовой коэффициент (например, они могут быть умножены на 1/2).
Для калибровки по каждой машине уровни доверия могут быть связаны с каждой машиной в калибровочном наборе. Точки данных об урожайности, связанные с машинами с высоким уровнем доверия, используются для калибровки точек данных об урожайности, связанных с машинами с низким уровнем доверия. Это дополнение может оказывать существенное влияние на результаты калибровки. На фиг. 14А-14В показана калибровка по всему полю, выполняемая с использованием (а) полного уровня доверия для первой машины, как показано на фиг. 14А, и (б) полного уровня доверия для второй машины, как показано на фиг. 14В.
Механизм установления доверия не ограничен простым обозначением одной машины как стандарта калибровки. Например, предположим, что есть четыре машины: первая машина, вторая машина, третья машина и четвертая машина. Если известно, что первая и вторая машины откалиброваны, но третья и четвертая машины - нет, полный уровень доверия может быть присвоен как первой, так и второй машине, и, следовательно, значения данных об урожайности, полученные от третьей и четвертой машин, калибруют на основании усредненных значений, полученных от первой и второй машин. В теории, если как первая, так и вторая машины откалиброваны, то можно ожидать, что две машины будут характеризоваться идентичными распределениями точек данных об урожайности в одной и той же локализованной зоне. На практике даже откалиброванные машины могут создавать характерные ошибки в наблюдениях (например, выпадающие значения). Предположив, что эти ошибки независимые и редкие, первая и вторая откалиброванные машины должны иметь низкую вероятность совпадения ошибок, и, таким образом, ошибки, возникающие у первой машины, будут нивелированы за счет отсутствия ошибок у второй машины для каждой зоны калибровки (и наоборот), в частности, когда используются медианные значения (как описано в методе устранения выпадающих значений), в противоположность средним значениям (как описано в методе начальной калибровки). Чем больше «известных» данных, тем выше устойчивость стандарта калибровки.
Согласно другому варианту осуществления доверительные значения могут быть обобщены с переводом из двоичной системы (низкая достоверность/высокая достоверность) в непрерывное значение между 0 (т.е. без достоверности) и 1 (т.е. абсолютная достоверность). Это предоставляет спектр уровней доверия. Обобщенная двоичная система и/или система с непрерывным значением может быть реализована путем калибровки точек данных об урожайности, например, путем взвешивания точек данных об урожайности на основании доверительных значений. Такие утверждения, как «пользователь в два раза больше доверяет значениям первой машины, чем значениям второй машины» могут применяться для надлежащей калибровки машин. Утверждение может применяться путем калибровки точек данных об урожайности первой и второй машин. Например, утверждение может применяться путем умножения каждой точки данных об урожайности, полученной второй машиной, на доверительное значение второй машины (например, 1/2) и путем умножения каждой точки данных об урожайности, полученной первой машиной, на доверительное значение первой машины (например, 1). Этот метод можно использовать для получения компромиссного решения между полным уровнем доверия и отсутствием доверия.
Метод калибровки по доверительному значению предусматривает выполнение описанных ниже действий.
1. Поступление на приемник 202 групп точек данных об урожайности по каждому полю, причем каждая группа связана с одним или несколькими атрибутами, и каждый атрибут связан с доверительным значением.
2. Калибровка модулем 230 калибровки по доверительному значению точек данных об урожайности каждой группы на основании доверительного значения, связанного с атрибутом группы, с получением точек данных об урожайности, откалиброванных по доверительному значению.
3. Выполнение методов начальной калибровки и/или устранения выпадающих значений с использованием точек данных об урожайности, откалиброванных по доверительному значению.
VIII. Послекалибровочная обработка
Одно из предположений, лежащих в основе калибровки, заключается в том, что в каждой зоне калибровки находится множество областей действия машины. Методы локализованной калибровки в сочетании с локальными областями действия машины, примеры которых показаны на фиг. 10, означают, что возможно множество случаев, в которых калибровка не будет выполняться в конкретных зонах. Для такой калибровки нужно сделать странное предположение: калибровка машины должна выполняться только в определенных зонах. Проблемы с калибровкой демонстрируют временную зависимость (т.е. калибровка ухудшается с течением сбора урожая), но предположения об аналогичной пространственной зависимости кажутся менее очевидными.
Например, рассмотрим две машины (первую машину и вторую машину), и предположим, что в зонах калибровки метод калибровки предполагает приемлемо одинаковую корректировку каждой точки данных об урожайности, полученных от первой машины (например, увеличение на 4 бушеля/акр практически во всех случаях). В таком случае можно логично предположить, что значение машины и/или орудия «занижено» на 4 бушеля/акр, и, следовательно, каждую точку данных об урожайности, измеренную первой машиной, необходимо увеличить на эту величину. С другой стороны, если величина калибровки изменяется (например, от -4 бушелей/акр до 19 бушелей/акр), то постоянная корректировка по полю для каждой точки данных об урожайности, вероятно, не будет подходящим решением.
Следовательно рассмотрим применение корректировки по всему полю всех точек данных об урожайности для конкретной машины после операции калибровки. Эта корректировка выполняется только в случае соответствия калибровок конкретной машины. Рассмотрим две возможные корректировки:
а) смещение: число X, которое прибавляется к каждой точке данных об урожайности, измеренной конкретной машиной;
б) отношение: процентная величина X, которая прибавляется к каждой точке данных об урожайности, измеренной конкретной машиной.
Как смещение, так и отношение вычисляют как среднее или медианное значения калибровок, выполняемых во всех зонах калибровки относительно конкретной машины. Например, если усредненная или медианная корректировка данных, полученных от первой машины, предусматривала изменение на 4 бушеля/акр в зонах калибровки, то величина смещения, равная 4 бушеля/акр, прибавлялась к точкам данных об урожайности по всему полю, полученным от первой машины, в качестве корректирующей величины. При использовании отношений, если соответствующая процентная величина прибавляется к данным, полученным от первой машины, в зонах калибровки (например, 8%), то эта процентная величина прибавляется ко всем точкам данных об урожайности, полученным от первой машины. В случае использования корректировки со смещением, отклонение в пределах машины сохраняется для каждой машины, и в качестве постоянного значения применяется к каждой точке данных об урожайности. Во время калибровок значения точек данных об урожайности корректируются относительно значений, полученных другими машинами, но не значений точек данных об урожайности, измеренных той же машиной. Для определения уместности применения такой корректировки по всему полю измеряют стандартное отклонение корректировок в пределах зон калибровки. Если стандартное отклонение падает ниже заданного порога, числа считаются соответствующими и выполняется общая калибровка.
Метод послекалибровочной обработки предусматривает выполнение описанных ниже действий.
1. Получение доступа послекалибровочным модулем 240 к заданному корректировочному значению для каждой группы из множества групп, причем заданное корректировочное значение для группы связано с атрибутом группы.
2. Корректировка послекалибровочным модулем 240 каждой откалиброванной точки данных об урожайности группы на основании заданного корректировочного значения для группы.
IX. Калибровка точек данных об урожайности
На фиг. 15 показана блок-схема способа калибровки точек данных об урожайности в соответствии с одним вариантом осуществления. На приемник 202 поступает 1502 множество групп точек данных об урожайности, причем каждая группа связана с атрибутом. Атрибут, с которым связана каждая группа, содержит по меньшей мере одно из следующего: идентификатор машины, идентификатор зоны, идентификатор локализованной зоны, идентификатор влажности и любую их комбинацию. Модуль 212 вычисления общей суммарной урожайности вычисляет 1504 общую суммарную урожайность на основании точек данных об урожайности множества групп. Для каждой группы из множества групп модуль 214 вычисления суммарной урожайности по группе вычисляет 1506 суммарную урожайность по группе на основании точек данных об урожайности группы. Модуль 210 вычисления вычитает 1508 суммарную урожайность по группе из каждой точки данных об урожайности в группе с получением скорректированных точек данных об урожайности. Модуль 210 вычисления прибавляет 1510 общую суммарную урожайность к каждой из скорректированных точек данных об урожайности с получением откалиброванных точек данных об урожайности.
X. Архитектура вычислительной машины
На фиг. 16 показана функциональная схема, содержащая компоненты приведенной в качестве примера машины для считывания команд с машиночитаемого носителя и их выполнения процессором (или контроллером). В частности, на фиг. 16 показано схематическое представление машины, приведенное в качестве примера в форме компьютерной системы 1600, в которой могут выполняться команды 1624 (например, программный код или программное обеспечение) для выполнения машиной любого одного или нескольких из методов, описанных в настоящем документе. Согласно альтернативным вариантам осуществления машина функционирует как независимое устройство или может быть соединена (например, по сети) с другими машинами. При развертывании сети машина может работать в качестве серверной или клиентской машины в сетевой среде сервер-клиент или в качестве узловой машины в одноранговой (или распределенной) сетевой среде.
Машина может представлять собой серверный компьютер, клиентский компьютер, персональный компьютер (ПК), планшетный ПК, телевизионную приставку (STB), карманный персональный компьютер (КПК), сотовый телефон, смартфон, устройство для доступа к сети, сетевой маршрутизатор, коммутатор или мост, или любую машину, выполненную с возможностью выполнения команд 1624 (последовательно или иным образом), уточняющих действия, которые должны быть выполнены этой машиной. Кроме того, хотя для удобства показана только одна машина, следует понимать, что термин «машина» также включает любую группу машин, которые по отдельности или совместно выполняют команды 1624 для выполнения любого из одного или нескольких описанных в настоящем документе способов.
Приведенная в качестве примера компьютерная система 1600 содержит процессор 1602 (например, центральный процессор [ЦП], графический процессор [ГП], цифровой сигнальный процессор [ЦСП], одну или несколько специализированных интегральных схем [ASIC], одну или несколько высокочастотных интегральных схем [RFIC] или любую их комбинацию), основную память 1604 и статическую память 1406, которые выполнены с возможностью связи друг с другом по шине 1608. Компьютерная система 1600 может дополнительно содержать графический дисплей 1610 (например, плазменный дисплей [PDP], дисплей на органических светодиодах [OLED], жидкокристаллический дисплей [ЖКД], проектор или электронно-лучевую трубку [ЭЛТ]) и соответствующие драйверы дисплея. Компьютерная система 1600 также может содержать буквенно-цифровое устройство 1612 ввода (например, клавиатуру), устройство 1614 управления курсором (например, мышь, трекбол, джойстик, датчик движения или другой инструмент указания), блок 1616 хранения, устройство 1618 генерирования сигналов (например, громкоговоритель) и сетевое интерфейсное устройство 1620, которые также выполнены с возможностью связи по шине 1608.
Блок 1616 хранения содержит машиночитаемый носитель 1622, на котором хранятся команды 1624 (например, программное обеспечение), реализующие любой из одного или нескольких способов или функций, описанных в настоящем документе. Во время выполнения компьютерной системой 1600 команды 1624 (например, программное обеспечение) также могут находиться, полностью или по меньшей мере частично, в основной памяти 1604 или в процессоре 1602 (например, в кэш-памяти процессора), причем основная память 1604 и процессор 1602 также представляют собой машиночитаемые носители. Команды 1624 (например, программное обеспечение) могут быть переданы или получены по сети 1626 через сетевое интерфейсное устройство 1620.
Хотя машиночитаемый носитель 1622 показан в приведенном в качестве примера варианте осуществления как единственный носитель, термин «машиночитаемый носитель» может относиться к одному носителю или нескольким носителям (например, централизованной или распределенной базе данных и/или связанным устройствам кэш-памяти и серверам), выполненным с возможностью хранения команд (например, команд 1624). Также следует понимать, что термин «машиночитаемый носитель» предусматривает любой носитель, выполненный с возможностью хранения команд (например, команд 1624), подходящих для выполнения машиной, и который обеспечивает выполнение машиной любого из одного или нескольких способов, описанных в настоящем документе. Термин «машиночитаемый носитель» включает, кроме прочего, хранилища данных в форме твердотельной памяти, оптические носители и магнитные носители.
XI. Дополнительные конфигурации
Во всем описании существительные во множественном числе могут предусматривать компоненты, операции или конструкции, описанные в единственной форме. Хотя отдельные операции в одном или нескольких способах показаны и описаны как отдельные операции, одна или несколько из отдельных операций могут быть выполнены одновременно, и не обязательно в указанном порядке. Конструкции и функциональные элементы, представленные как отдельные компоненты в приведенных в качестве примера конфигурациях, могут быть реализованы как объединенные конструкции или компоненты. Аналогично конструкции и функциональные элементы, представленные как единственный компонент, могут быть реализованы как отдельные компоненты. Эти и другие варианты, модификации, дополнения и усовершенствования подпадают под объем правовой охраны объекта настоящего изобретения.
Некоторые варианты осуществления описаны в настоящем документе как содержащие логику или некоторое количество компонентов, модулей или механизмов. Модули могут представлять собой либо программные модули (например, код, реализованный на машиночитаемом носителе или в сигнале передачи) или аппаратные модули. Аппаратный модуль представляет собой материальный блок, выполненный с возможностью выполнения определенных операций или выполненный или расположенный определенным образом. Согласно приведенным в качестве примера вариантам осуществления одна или несколько вычислительных систем (например, независимая, клиентская или серверная компьютерная система) или один или несколько аппаратных модулей компьютерной системы (например, процессор или группа процессоров) могут быть сконфигурированы с использованием программного обеспечения (например, приложения или части приложения) как аппаратный модуль, работа которого направлена на выполнение определенных операций, описанных в настоящем документе.
В различных вариантах осуществления аппаратный модуль может быть реализован в механической или электронной форме. Например, аппаратный модуль может содержат специализированную схему или логику, которая имеет постоянную конфигурацию (например, как специализированный процессор, такой как программируемая вентильная матрица [ПВМ] или специализированная интегральная схема [ASIC]) для выполнения определенных операций. Аппаратный модуль также может содержать программируемую логику или схему (например, заключенную в специализированном процессоре или другом программируемом процессоре), которая временно сконфигурирована с использованием программного обеспечения для выполнения определенных операций. Следует понимать, что решение по реализации аппаратного модуля в механическом виде, в специализированной схеме с постоянной конфигурацией, или в схеме с временной конфигурацией (например, с конфигурацией, настроенной с использованием программного обеспечения) может быть вызвано соображениями, касающимися затрат и времени.
Различные операции приведенных в качестве примера способов, описанных в настоящем документе, могут быть выполнены по меньшей мере частично одним или несколькими процессорами, например, процессором 1602, имеющими временную конфигурацию (например, настроенную с использованием программного обеспечения) или постоянную конфигурацию, подходящую для выполнения соответствующих операций. Независимо от того, какая конфигурация используется: используется временная или постоянная, такие процессоры могут представлять собой процессорно реализованные модули, работа которых направлена на выполнение одной или нескольких операций или функций. Модули, упомянутые в данном документе, в некоторых приведенных в качестве примера вариантах осуществления могут представлять собой процессорно реализованные модули.
Один или несколько процессоров также могут быть выполнен с возможностью поддержки выполнения соответствующих операций в среде «облачных вычислений» или в качестве «программного обеспечения как сервис» (SaaS). Например, по меньшей мере некоторые из операций могут быть выполнены группой компьютеров (например машинами, содержащими процессоры), причем эти операции доступны через сеть (например, Интернет) и через один или несколько подходящих интерфейсов (например, прикладных программных интерфейсов [API]).
Выполнение некоторых из операций может быть распределено среди одного или нескольких процессоров, не только находящихся в одной машине, но распределенных по ряду машин. Согласно некоторым приведенным в качестве примера вариантам осуществления один или несколько процессоров или процессорно реализованных модулей могут быть расположены в одном географическом месте расположения (например, в домашней среде, офисной среде или серверной ферме). Согласно другим приведенным в качестве примера вариантам осуществления один или несколько процессоров или процессорно реализованных модулей могут быть распределены по ряду географических мест расположения.
Некоторые части этого описания представлены в виде алгоритмов или символьных представлений операций, выполняемых с данными, которые хранятся в виде битов или двоичных цифровых сигналов в памяти машины (например, в памяти компьютера). Эти алгоритмы или символьные представления представляют собой примеры способов, используемых специалистами в области обработки данных, для передачи сути их работы другим специалистам в данной области техники. Под термином «алгоритм» в настоящем документе следует понимать логическую последовательность операций или аналогичную обработку, ведущую к получению желаемого результата. В этом контексте алгоритмы и операции предусматривают совершение физических действий над физическими величинами. Как правило, но не обязательно, такие величины могут принимать форму электрических, магнитных или оптических сигналов, которые можно хранить, к которым можно получать доступ, передавать, объединять, сравнивать или над которыми можно совершать иные действия с помощью машины. Иногда оказывается удобным, как правило вследствие широкого использования, называть эти сигналы с использованием таких слов, как «данные», «содержимое», «биты», «значения», «элементы», «символы», «буквы», «термины», «числа», «числовые обозначения» и т.п. Однако эти слова представляют собой лишь удобные обозначения и связаны с соответствующими физическими величинами.
Если специально не указано иное, описания в данном документе, выполненные с использованием таких слов, как «обработка», «расчет», «вычисление», «определение», «представление», «отображение» и т.п. могут относиться к действиям или процессам машины (например, компьютера), которая совершает действия или преобразует данные, представленные в качестве физических (например, электронных, магнитных или оптических) величин в одной или нескольких из видов памяти (например, энергонезависимой памяти, энергозависимой памяти или их комбинации), регистрах или других компонентах машины, которые получают, хранят, передают или отображают информацию.
Необходимо отметить, что любые упоминания фразы «один вариант осуществления» или «вариант осуществления» означают, что конкретный элемент, признак, конструкция или характеристика, описанные согласно варианту осуществления, включены в по меньшей мере один вариант осуществления. Таким образом, формулировка фраз «в соответствии с одним вариантом осуществления» в различных местах в описании необязательно относится к одному и тому же варианту осуществления.
Используемые в данном документе термины «содержит», «содержащий», «включает», «включающий», «характеризуется», «характеризующийся» или любые их вариантом являются включающими и не являются исключающими. Например, процесс, способ, изделие или устройство, которое содержит перечень элементов, не обязательно ограничено этими элементами, но может содержать другие элементы, которые явно не указаны или характерны для такого процесса, способа, изделия или устройства. Дополнительно, если явно не указано другое, термин «или» относится к включающему или, а не исключающему или. Например, условие А или В удовлетворяется любым из приведенного ниже: А истинно (или существует), и В ложно (или не существует), А ложно (или не существует), и В истинно (или существует), и А и В истинны (или существуют).
Более того, использование терминов в единственном числе предназначено для описания элементов и компонентов описанных вариантов осуществления. Это сделано для удобства и для общего представления о настоящем изобретении. Следует понимать, что эти термины в единственном числе предполагают и множественное число, если явно не указано другое.
После прочтения настоящего описания специалистам в области техники, к которой относится настоящее изобретение, будут понятны дополнительные конструктивные и функциональные исполнения системы и процесса калибровки данных об урожайности после уборки урожая благодаря принципам, описанным в данном документе. Таким образом, хотя были показаны и описаны конкретные варианты осуществления и области применения, следует понимать, что описанные варианты осуществления не ограничены точной конструкцией и компонентами, описанными данном документе. В порядок выполнения, операции и детали способа, описанного в данном документе, могут быть внесены различные модификации, изменения и вариации, очевидные для специалистов в области техники, к которой относится настоящее изобретение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ КАТАЛОГА НЕБЕСНЫХ ОБЪЕКТОВ ИЗ БОЛЬШИХ МАССИВОВ АСТРОНОМИЧЕСКИХ ИЗОБРАЖЕНИЙ | 2017 |
|
RU2659493C1 |
| КАЛИБРОВКА ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ | 2013 |
|
RU2645807C2 |
| ЗАМЕЩЕНИЕ ТЕКУЧЕЙ СРЕДЫ | 2018 |
|
RU2764145C2 |
| КАЛИБРОВКА АНТЕННОЙ РЕШЕТКИ ДЛЯ СИСТЕМ БЕСПРОВОДНОЙ СВЯЗИ | 2006 |
|
RU2390942C2 |
| БАЗОВАЯ СТАНЦИЯ И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2006 |
|
RU2403679C2 |
| Способ и устройство для кодирования облака точек | 2020 |
|
RU2778377C1 |
| СИСТЕМА И СПОСОБ НАСТРОЙКИ/КАЛИБРОВКИ СЕМЕЙСТВ СТУПЕНЕЙ ТУРБОМАШИН | 2010 |
|
RU2559718C2 |
| Способ контроля состояния объектов | 2024 |
|
RU2823990C1 |
| КОМПЬЮТЕРНО-РЕАЛИЗУЕМЫЙ СПОСОБ И СИСТЕМА ЦЕНТРАЛИЗОВАННОГО УПРАВЛЕНИЯ ОПЕРАЦИОННЫМ ДНЕМ ФИНАНСОВО-КРЕДИТНОЙ ОРГАНИЗАЦИИ | 2018 |
|
RU2723452C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МАНИПУЛЯТОРОМ ТИПА "ПРОСТРАНСТВЕННАЯ МЫШЬ" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2480813C1 |
Изобретение относится к калибровке данных об урожайности после уборки урожая. Технический результат заключается в повышении точности калибровки данных. Варианты осуществления относятся к калибровке точек данных об урожайности. В систему калибровки поступает множество групп точек данных об урожайности. Каждая группа связана с атрибутом, например идентификатором машины, идентификатором зоны, идентификатором локализованной зоны и/или идентификатором влажности. На основании точек данных об урожайности из множества групп система вычисляет общую суммарную урожайность. На основании точек данных об урожайности каждой группы система вычисляет суммарную урожайность по группе. Система вычитает из каждой точки данных об урожайности из группы суммарную урожайность по группе, получая скорректированные точки данных об урожайности. Система прибавляет общую суммарную урожайность к каждой из скорректированных точек данных об урожайности, получая откалиброванные точки данных об урожайности. 3 н. и 18 з.п. ф-лы, 21 ил., 1 табл.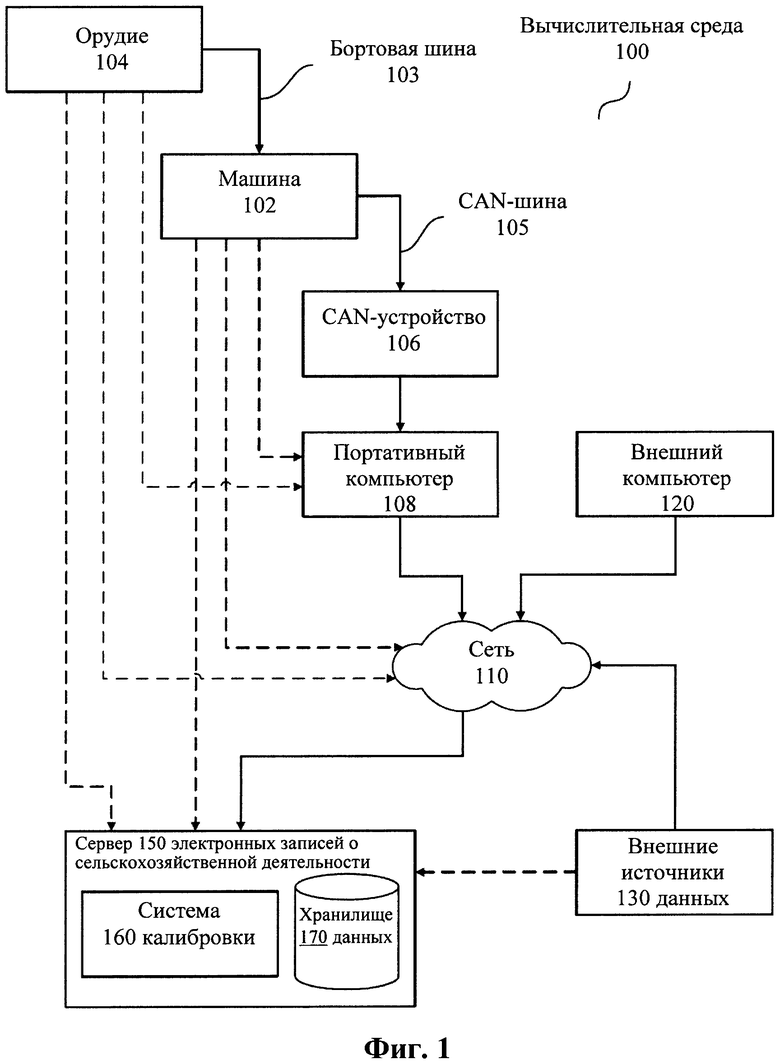
1. Способ калибровки данных об урожайности, предусматривающий:
получение множества групп точек данных об урожайности, где каждая группа связана с атрибутом, при этом атрибут содержит по меньшей мере одно из следующего: идентификатор машины, идентификатор зоны, идентификатор локализованной зоны, идентификатор влажности и любая их комбинация;
вычисление общей суммарной урожайности на основании точек данных об урожайности множества групп;
для каждой группы из множества групп:
вычисление суммарной урожайности по группе на основании точек данных об урожайности группы;
вычитание суммарной урожайности по группе из каждой точки данных об урожайности группы с получением скорректированных точек данных об урожайности;
прибавление общей суммарной урожайности к каждой из скорректированных точек данных об урожайности с получением откалиброванных точек данных об урожайности.
2. Способ по п. 1, в котором общая суммарная урожайность представляет собой общую среднюю урожайность, а суммарная урожайность по группе представляет собой среднюю урожайность по группе.
3. Способ по п. 1, в котором общая суммарная урожайность представляет собой общую медианную урожайность, а суммарная урожайность по группе представляет собой медианную урожайность по группе.
4. Способ по п. 1, дополнительно предусматривающий: для каждой точки данных об урожайности:
определение набора точек данных об урожайности, содержащего точки данных об урожайности в пределах порогового расстояния от точки данных об урожайности, и
калибровку точки данных об урожайности на основании набора точек данных об урожайности с получением точки данных об урожайности, откалиброванной по окрестности.
5. Способ по п. 1, дополнительно предусматривающий:
для каждой группы из множества групп:
получение доверительного значения, связанного с атрибутом, и
калибровку точек данных об урожайности группы на основании доверительного значения с получением откалиброванных по доверительному значению точек данных об урожайности.
6. Способ по п. 1, дополнительно предусматривающий:
для каждой группы из множества групп:
получение доступа к заданному корректировочному значению для группы, причем заданное корректировочное значение связано с атрибутом, и
корректировку каждой из откалиброванных точек данных об урожайности по заданному корректировочному значению.
7. Способ по п. 6, в котором заданное корректировочное значение представляет собой по меньшей мере одно из числа и процентной величины.
8. Система калибровки данных об урожайности, содержащая:
энергонезависимый машиночитаемый носитель данных, в котором хранятся выполняемые компьютером команды, в результате выполнения которых осуществляют стадии, предусматривающие:
получение множества групп точек данных об урожайности, где каждая группа связана с атрибутом, при этом атрибут содержит по меньшей мере одно из следующего: идентификатор машины, идентификатор зоны, идентификатор локализованной зоны, идентификатор влажности и любая их комбинация;
вычисление общей суммарной урожайности на основании точек данных об урожайности множества групп;
для каждой группы из множества групп:
вычисление суммарной урожайности по группе на основании точек данных об урожайности группы;
вычитание суммарной урожайности по группе из каждой точки данных об урожайности группы с получением скорректированных точек данных об урожайности;
прибавление общей суммарной урожайности к каждой из скорректированных точек данных об урожайности с получением откалиброванных точек данных об урожайности, и
процессор, выполненный с возможностью выполнения компьютерных команд.
9. Система по п. 8, в которой общая суммарная урожайность представляет собой общую среднюю урожайность, а суммарная урожайность по группе представляет собой среднюю урожайность по группе.
10. Система по п. 8, в которой общая суммарная урожайность представляет собой общую медианную урожайность, а суммарная урожайность по группе представляет собой медианную урожайность по группе.
11. Система по п. 8, в которой в результате выполнения команд выполняют дополнительные стадии, предусматривающие:
для каждой точки данных об урожайности:
определение набора точек данных об урожайности, содержащего точки данных об урожайности в пределах порогового расстояния от точки данных об урожайности, и
калибровку точки данных об урожайности на основании набора точек данных об урожайности с получением точки данных об урожайности, откалиброванной по окрестности.
12. Система по п. 8, в которой в результате выполнения команд выполняют дополнительные стадии, предусматривающие:
для каждой группы из множества групп:
получение доверительного значения, связанного с атрибутом, и
калибровку точек данных об урожайности группы на основании доверительного значения с получением откалиброванных по доверительному значению точек данных об урожайности.
13. Система по п. 8, в которой в результате выполнения команд выполняют дополнительные стадии, предусматривающие:
для каждой группы из множества групп:
получение доступа к заданному корректировочному значению для группы, причем заданное корректировочное значение связано с атрибутом, и
корректировку каждой из откалиброванных точек данных об урожайности по заданному корректировочному значению.
14. Система по п. 13, в которой заданное корректировочное значение представляет собой по меньшей мере одно из числа и процентной величины.
15. Энергонезависимый машиночитаемый носитель данных, в котором хранятся выполняемые компьютером команды, в результате выполнения которых процессором выполняют стадии, предусматривающие:
получение множества групп точек данных об урожайности, где каждая группа связана с атрибутом, при этом атрибут содержит по меньшей мере одно из следующего: идентификатор машины, идентификатор зоны, идентификатор локализованной зоны, идентификатор влажности и любая их комбинация;
вычисление общей суммарной урожайности на основании точек данных об урожайности множества групп;
для каждой группы из множества групп:
вычисление суммарной урожайности по группе на основании точек данных об урожайности группы;
вычитание суммарной урожайности по группе из каждой точки данных об урожайности группы с получением скорректированных точек данных об урожайности;
прибавление общей суммарной урожайности к каждой из скорректированных точек данных об урожайности с получением откалиброванных точек данных об урожайности.
16. Энергонезависимый машиночитаемый носитель данных по п. 15, в котором общая суммарная урожайность представляет собой общую среднюю урожайность, а суммарная урожайность по группе представляет собой среднюю урожайность по группе.
17. Энергонезависимый машиночитаемый носитель данных по п. 15, в котором общая суммарная урожайность представляет собой общую медианную урожайность, а суммарная урожайность по группе представляет собой медианную урожайность по группе.
18. Энергонезависимый машиночитаемый носитель данных по п. 15, в котором в результате выполнения процессором команд выполняют дополнительные стадии, предусматривающие:
для каждой точки данных об урожайности:
определение набора точек данных об урожайности, содержащего точки данных об урожайности в пределах порогового расстояния от точки данных об урожайности, и
калибровку точки данных об урожайности на основании набора точек данных об урожайности с получением точки данных об урожайности, откалиброванной по окрестности.
19. Энергонезависимый машиночитаемый носитель данных по п. 15, в котором в результате выполнения процессором команд выполняют дополнительные стадии, предусматривающие:
для каждой группы из множества групп:
получение доверительного значения, связанного с атрибутом, и
калибровку точек данных об урожайности группы на основании доверительного значения с получением откалиброванных по доверительному значению точек данных об урожайности.
20. Энергонезависимый машиночитаемый носитель данных по п. 15, в котором в результате выполнения процессором команд выполняют дополнительные стадии, предусматривающие:
для каждой группы из множества групп:
получение доступа к заданному корректировочному значению для группы, причем заданное корректировочное значение связано с атрибутом, и
корректировку каждой из откалиброванных точек данных об урожайности по заданному корректировочному значению.
21. Энергонезависимый машиночитаемый носитель данных по п. 20, в котором заданное корректировочное значение представляет собой по меньшей мере одно из числа и процентной величины.
| US 5995894 A, 30.11.1999 | |||
| КАРТА ПРИЗНАКОВ УРОЖАЯ ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2006 |
|
RU2405299C2 |
| СПОСОБ И СИСТЕМА МАРШРУТИЗАЦИИ ДЛЯ СИСТЕМ СЕЛЬХОЗМАШИН | 2007 |
|
RU2439835C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ КОМБАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2152147C1 |

