Данная заявка притязает на преимущества предварительной заявки США № 61/490999, поданной 27 мая 2011 года под заголовком «Classifying multiple device states», содержание которой в полном объеме включено сюда посредством ссылки.
Уровень техники
Устройства беспроводной связи нашли невиданное распространение в современном обществе. Например, люди используют сотовые телефоны, смартфоны, персональные цифровые помощники, компьютеры типа лэптоп, пейджеры, компьютеры-планшеты и т.д. для посылки и приема данных из бесчисленного количества мест, используя беспроводную связь. Кроме того, достижения в технологии беспроводной связи значительно увеличили универсальность современных устройств беспроводной связи, что позволяет пользователям выполнять широкий диапазон задач, используя одно портативное устройство, для которых раньше, как правило, требовалось либо множество устройств, либо более крупное, не портативное оборудование.
Смартфоны и другие мобильные устройства могут содержать датчики. Эти датчики могут включать в себя, но не только: датчики движения, такие как акселерометры, гироскопы и т.д., а также датчики параметров окружающей среды, такие как термометры, световые датчики, микрофоны и т.д. Выходные сигналы датчиков движения устройства указывают на то или иное движение устройства. Движения устройства содержат информацию как о состоянии движения пользователя (например, пользователь сидит, стоит, идет, бежит и т.д.), так и о местоположении устройства у пользователя (например, в кармане, рюкзаке, в руке, на столе и т.д.).
Можно исследовать состояния, соответствующие конкретным выходным сигналам датчиков, с тем чтобы данные от датчиков можно было впоследствии использовать для определения неизвестных состояний устройства. Например, во время тренировки устройство, сконфигурированное для выполнения алгоритма классификации (например, байесовский классификатор и т.д.), может столкнуться с примерами комбинаций состояния движения/местоположения устройства и может обработать соответствующие данные от датчиков для построения модели для каждой комбинации. Затем при представлении нового набора информации от датчиков для неизвестного состояния движения/местоположения устройства классификатор выберет состояние движения и местоположение устройства, которые имеют максимальные расчетные значения правдоподобия (или апостериорные вероятности, если известны априорные вероятности).
Указанные алгоритмы классификации могут функционировать на основе идентифицированных характеристик и заданных статистических моделей. Например, для оценки состояния движения можно использовать модель смеси нормальных распределений (GMM) с 16 смешиваемыми компонентами. В качестве другого примера для оценки местоположения устройства можно использовать модель GMM с 2 смешиваемыми компонентами. Имеется потребность в способах, которые дополнительно повысят качество классификации состояний устройства.
Сущность изобретения
Описанный здесь пример способа классификации множества типов состояний для устройства включает в себя: реализацию доступа к информации от датчиков устройства, где по меньшей мере некоторая часть информации от датчиков используется в первом наборе характеристик и по меньшей мере некоторая часть информации от датчиков используется во втором наборе характеристик; обработку первого набора характеристик с использованием первого алгоритма классификации, где первый алгоритм классификации сконфигурирован для определения первого предполагаемого состояния первого типа и первого предполагаемого состояния второго типа; обработку второго набора характеристик с использованием второго алгоритма классификации, где второй алгоритм классификации сконфигурирован для определения второго предполагаемого состояния первого типа и второго предполагаемого состояния второго типа; и определение предполагаемого состояния устройства как первого предполагаемого состояния первого типа и второго предполагаемого состояния второго типа.
Реализации указанного способа могут включать в себя одну или несколько из следующих характеристик. Первый тип состояния представляет состояние движения, а второй тип состояния представляет состояние местоположения. Информация от датчиков, используемая в первом наборе характеристик, включает в себя выход акселерометра, а первый набор характеристик включает в себя дисперсию выхода акселерометра на временном интервале. Информация от датчиков, используемая во втором наборе характеристик, включает в себя выход акселерометра для множества осей акселерометра многоосного акселерометра, имеющего по меньшей мере первую ось и вторую ось, а второй набор характеристик включает в себя усредненное соотношение ускорения между двумя осями многоосного акселерометра. Первый алгоритм классификации включает в себя алгоритм максимального правдоподобия, использующий первый набор характеристик и первую функцию распределения вероятности. Первый алгоритм классификации включает в себя алгоритм максимальной маргинальной апостериорной вероятности, использующий первый набор характеристик и первую функцию распределения вероятности. Второй алгоритм классификации включает в себя алгоритм максимального правдоподобия, использующий второй набор характеристик и вторую функцию распределения вероятности. Второй алгоритм классификации включает в себя алгоритм максимальной маргинальной апостериорной вероятности, использующий второй набор характеристик и вторую функцию распределения вероятности. Как первый алгоритм классификации, так и второй алгоритм классификации включают в себя байесовский классификатор.
Пример описанного здесь мобильного устройства включает в себя один или несколько датчиков, сконфигурированных для создания выхода датчиков; модуль генератора набора характеристик, связанный с одним или несколькими датчиками и сконфигурированный для связывания соответствующей информации от датчиков, указывающей выход датчиков, по меньшей мере с одним из наборов характеристик: первым или вторым; и модуль классификации, связанный с модулем генератора набора характеристик. Модуль классификации сконфигурирован для выполнения операций, включая обработку первого набора характеристик с использованием первого алгоритма классификации, где первый алгоритм классификации сконфигурирован для определения первого предполагаемого состояния первого типа и первого предполагаемого состояния второго типа, обработки второго набора характеристик с использованием второго алгоритма классификации, где второй алгоритм классификации сконфигурирован для определения второго предполагаемого состояния первого типа и второго предполагаемого состояния второго типа, и определения предполагаемого состояния устройства как первого предполагаемого состояния первого типа и второго предполагаемого состояния второго типа.
Реализации мобильного устройства могут включать в себя одну или несколько из следующих характеристик. Первый тип состояния представляет состояние движения, а второй тип состояния представляет состояние местоположения. Один или несколько датчиков включают в себя один или несколько акселерометров, причем информация от датчиков, используемая в первом наборе характеристик, включает в себя выход акселерометра, а первый набор характеристик включает в себя дисперсию выхода акселерометра на временном интервале. Один или несколько датчиков включают в себя один или несколько акселерометров, причем информация от датчиков, используемая во втором наборе характеристик, включает в себя выход акселерометра для множества осей акселерометра многоосного акселерометра, имеющего по меньшей мере первую ось и вторую ось, а второй набор характеристик включает в себя усредненное соотношение ускорения между двумя осями многоосного акселерометра. Первый алгоритм классификации включает в себя алгоритм максимального правдоподобия, использующий первый набор характеристик и первую функцию распределения вероятности. Первый алгоритм классификации включает в себя алгоритм максимальной маргинальной апостериорной вероятности, использующий первый набор характеристик и первую функцию распределения вероятности. Второй алгоритм классификации включает в себя алгоритм максимального правдоподобия, использующий второй набор характеристик и вторую функцию распределения вероятности. Второй алгоритм классификации включает в себя алгоритм максимальной маргинальной апостериорной вероятности, использующий второй набор характеристик и вторую функцию распределения вероятности. Как первый алгоритм классификации, так и второй алгоритм классификации включают байесовский классификатор.
Описанный здесь другой пример мобильного устройства включает в себя: средство для реализации доступа к информации от датчиков устройства; средство для связывания по меньшей мере некоторой части информации от датчиков с первым набором характеристик; средство для связывания по меньшей мере некоторой части информации от датчиков со вторым набором характеристик; средство для обработки первого набора характеристик с использованием первого алгоритма классификации, где первый алгоритм классификации сконфигурирован для определения первого предполагаемого состояния первого типа и первого предполагаемого состояния второго типа; средство для обработки второго набора характеристик с использованием второго алгоритма классификации, где второй алгоритм классификации сконфигурирован для определения второго предполагаемого состояния первого типа и второго предполагаемого состояния второго типа; и средство для определения предполагаемого состояния устройства как первого предполагаемого состояния первого типа и второго предполагаемого состояния второго типа.
Реализации вышеуказанного мобильного устройства могут включать в себя одну или несколько из следующих характеристик. Первый тип состояния представляет состояние движения, а второй тип состояния представляет состояние местоположения. Информация от датчиков, связанная с первым набором характеристик, включает в себя выход акселерометра, а первый набор характеристик включает в себя дисперсию выхода акселерометра на временном интервале. Информация от датчиков, связанная со вторым набором характеристик, включает в себя выход акселерометра для множества осей акселерометра многоосного акселерометра, имеющего по меньшей мере первую ось и вторую ось, а второй набор характеристик включает в себя усредненное соотношение ускорения между двумя осями многоосного акселерометра. Первый алгоритм классификации включает в себя по меньшей мере один из алгоритмов: алгоритм максимального правдоподобия или алгоритм максимальной маргинальной апостериорной вероятности, причем первый алгоритм классификации использует первый набор характеристик и первую функцию распределения вероятности. Второй алгоритм классификации включает в себя по меньшей мере один из алгоритмов: алгоритм максимального правдоподобия или алгоритм максимальной маргинальной апостериорной вероятности, причем второй алгоритм классификации использует второй набор характеристик и вторую функцию распределения вероятности.
Описанный здесь пример компьютерного программного продукта находится на считываемом процессором носителе и включает в себя считываемые процессором команды, сконфигурированные для инициирования: реализации доступа процессором к информации от датчиков устройства, где по меньшей мере некоторая часть информации от датчиков используется в первом наборе характеристик и по меньшей мере некоторая часть информации от датчиков используется во втором наборе характеристик; обработки процессором первого набора характеристик с использованием первого алгоритма классификации, сконфигурированного для определения первого предполагаемого состояния первого типа и первого предполагаемого состояния второго типа; обработки процессором второго набора характеристик с использованием второго алгоритма классификации, сконфигурированного для определения второго предполагаемого состояния первого типа и второго предполагаемого состояния второго типа; и определения процессором предполагаемого состояния устройства как первого предполагаемого состояния первого типа и второго предполагаемого состояния второго типа.
Реализации компьютерного программного продукта могут включать в себя одну или несколько следующих характеристик. Первый тип состояния представляет состояние движения, а второй тип состояния представляет состояние местоположения. Информация от датчиков, используемая в первом наборе характеристик, включает в себя выход акселерометра, а первый набор характеристик включает в себя дисперсию выхода акселерометра на временном интервале. Информация от датчиков, используемая во втором наборе характеристик, включает в себя выход акселерометра для множества осей акселерометра многоосного акселерометра, имеющего по меньшей мере первую ось и вторую ось, а второй набор характеристик включает в себя усредненное соотношение ускорения между двумя осями многоосного акселерометра. Первый алгоритм классификации включает в себя по меньшей мере один из алгоритмов: алгоритм максимального правдоподобия или алгоритм максимальной маргинальной апостериорной вероятности, причем первый алгоритм классификации использует первый набор характеристик и первую функцию распределения вероятности. Второй алгоритм классификации содержит по меньшей мере один из алгоритмов: алгоритм максимального правдоподобия или алгоритм максимальной маргинальной апостериорной вероятности, причем второй алгоритм классификации использует второй набор характеристик и вторую функцию распределения вероятности.
Краткое описание чертежей
Фиг.1 - блок-схема компонент вычислительного устройства;
фиг.2 - блок-схема системы для классификации множества состояний устройства;
фиг.3-4 - иллюстрация соответствующих классификаторов, связанных с различными способами классификации состояний;
фиг.5 - блок-схема системы для совместной классификации множества состояний устройства с использованием отдельных классификаторов;
фиг.6 - блок-схема процесса классификации множества состояний, связанных с устройством.
Подробное описание изобретения
Здесь описаны технические способы для классификации множества типов состояний путем использования множества классификаторов. В одном варианте множество типов состояний устройства классифицируют с использованием соответствующего количества классификаторов, где каждый классификатор оптимизируют в отношении вывода предполагаемого значения для одного конкретного состояния. В качестве альтернативы, в другом варианте используются отдельные совместные классификаторы множества состояний устройства. В примере, где классифицируются состояния движения и местоположения, первый классификатор использует набор характеристик и статистическую модель, оптимизированную для классификации состояния движения, в то время как второй классификатор использует набор характеристик и статистическую модель, оптимизированную для классификации местоположения устройства. Каждый классификатор выдает совместную оценку состояния движения и местоположения устройства, но первый классификатор (то есть классификатор состояния движения) отбрасывает или не учитывает свой выходной сигнал, касающийся местоположения устройства, а второй классификатор (то есть классификатор местоположения устройства) отбрасывает или не учитывает свой выходной сигнал, касающийся состояния движения. Хотя различные примеры представлены здесь в контексте классификации состояний местоположения и движения, здесь не предполагается, что данное изобретение ограничивается каким-либо конкретным примером (примерами), то есть также возможна классификация и других состояний.
Описанные здесь детали и/или технические способы могут обеспечить одну или несколько нижеследующих возможностей, а также другие возможности, которые здесь не упомянуты. Классификация состояний устройства может выполняться с повышенной эффективностью и точностью. Оценка множества состояний устройства, таких как движение и местоположение, может выполняться в одной совокупности операций без потери точности оценок. Мобильные устройства и мобильные приложения, сконфигурированные для их выполнения на мобильных устройствах, могут функционировать с повышенной гибкостью и адаптивностью к изменениям в окружающей среде. Хотя здесь описана по меньшей мере одна пара «деталь/технический прием - эффект», возможно, что указанный эффект будет достигнут средствами, отличными от указанных, причем указанная деталь/технический прием необязательно может давать указанный эффект.
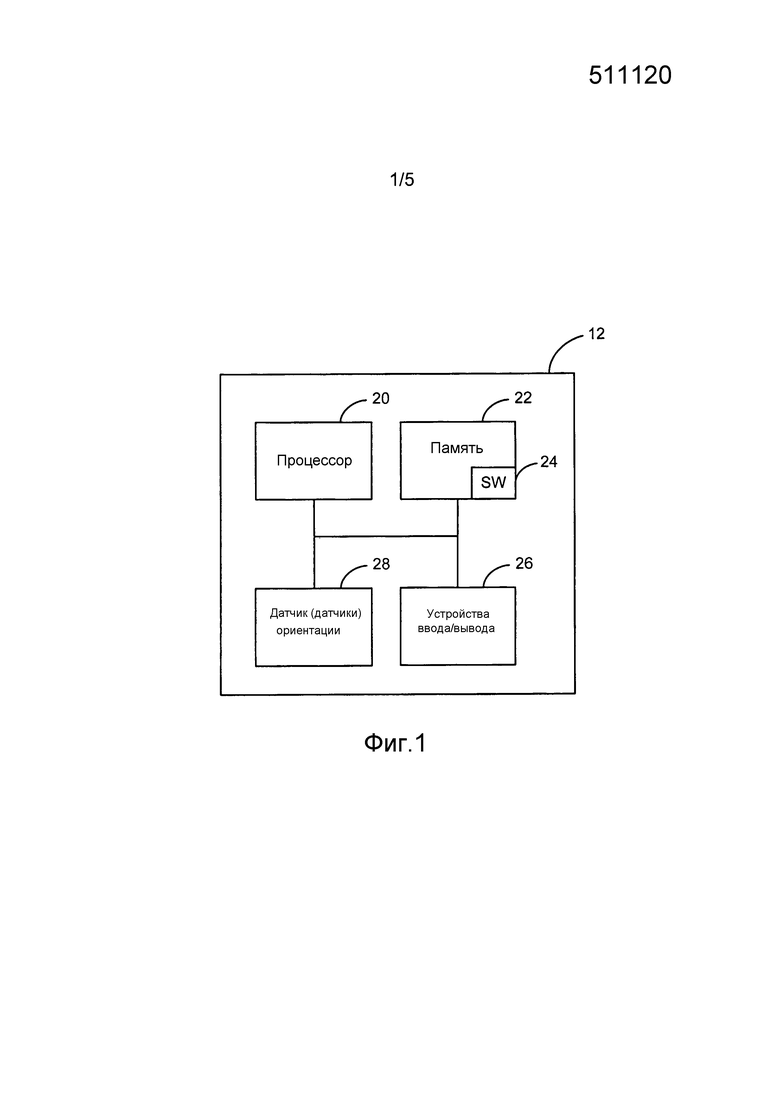
Обратимся к фиг.1, где приведенное в качестве примера вычислительное устройство 12 содержит процессор 20, память 22, включая программное обеспечение 24, устройство (устройства) 26 ввода/вывода (например, дисплей, динамик, клавиатура, сенсорный экран или сенсорная панель и т.д.) и один или несколько датчиков 28 ориентации. Вдобавок устройство 12 может включать в себя другие компоненты, не показанные на фиг.1, такие как сетевой интерфейс, который помогает обеспечить двунаправленную связь между устройством 12 и одним или несколькими сетевыми объектами и/или любой другой подходящей компонентой (компонентами).
Процессор 20 представляет собой интеллектуальное аппаратное устройство, например центральный процессор (CPU) (например, процессоры, выпускаемые Intel® Corporation или AMD®), микроконтроллер, специализированную прикладную интегральную схему (ASIC) и т.д. Память 22 включает в себя запоминающую среду долговременного хранения, такую как память с произвольной выборкой (RAM) и память только для считывания (ROM). В памяти 22 хранится программное обеспечение 24, которое представляет собой считываемый и исполняемый компьютером программный код, содержащий команды, сконфигурированные для инициирования выполнения процессором 20 различных описанных здесь функций при исполнении указанных команд. В качестве альтернативы, программное обеспечение 24 может непосредственно не исполняться процессором 20, а может быть сконфигурировано для инициирования выполнения компьютером указанных функций, например, при компиляции и исполнении программного обеспечения 24.
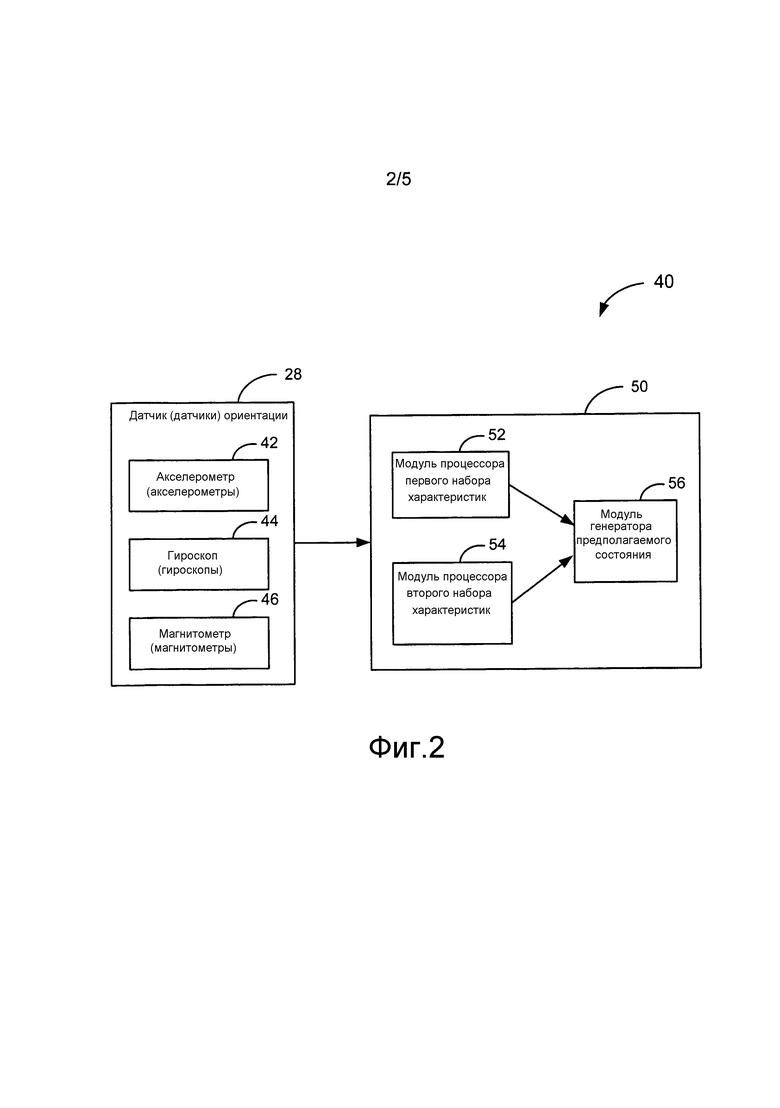
Датчики 28 ориентации сконфигурированы для сбора данных, относящихся к движению, местоположению и/или ориентации устройства 12, а также к изменениям указанных характеристик во времени. Обратимся также к фиг.2, где датчики 28 ориентации могут включать в себя, например, один или несколько акселерометров 42, гироскопов 44, магнитометров 46 или т.п. Датчики 28 ориентации сконфигурированы для предоставления информации, исходя из которой можно определить движение, местоположение и/или ориентацию устройства 12. Соответствующие датчики 28 ориентации, связанные с устройством 12, можно использовать для измерения по одной оси или нескольким осям. Для многоосного измерения можно использовать множество одноосных акселерометров и/или многоосные (например, двуосные или трехосные) измерения для измерения движения относительно линейных осей (например, x-y-z, север-восток-местная вертикаль и т.д.), а для измерения движения относительно угловых осей (например, крен, тангаж или рыскание) можно использовать множество одноосных гироскопов и/или множество многоосных гироскопов.
Датчики 28 ориентации могут представлять информацию во времени, например, периодически, так чтобы можно было сравнивать текущую и прошлую ориентацию, местоположения и/или направления движения, для определения изменений направления движения, местоположения и/или ориентации устройства 12. Гироскоп 44 может предоставлять информацию, касающуюся движения устройства 12, сказывающегося на его ориентации. Акселерометр 42 сконфигурирован для предоставления информации, касающейся ускорения свободного падения, так чтобы можно было определить направление гравитации относительно устройства 12. Магнитометр 46 сконфигурирован для обеспечения индикации направления в трех измерениях на северный магнитный полюс относительно устройства 12, например, относительно истинного севера или магнитного севера. Для преобразования направления относительного истинного севера в направление относительно магнитного севера и обратно можно использовать механизмы преобразования на основе магнитного склонения и/или другие подходящие средства.
Как было установлено выше, вычислительные устройства 12 (например, смартфоны, планшеты или лэптопы, персональные цифровые помощники (PDA) и т.д.) содержат датчики, предоставляющие информацию различных типов. Например, датчики 28 ориентации обеспечивают выходной сигнал, указывающий перемещения соответствующего устройства 12. В свою очередь, перемещения устройства содержат информацию как о состоянии движения пользователя устройства (например, пользователь сидит, стоит, идет, бежит и т.д.), так и местоположения устройства относительно пользователя (например, в кармане, в рюкзаке, в руке, на столе и т.д.).
Как уже обсуждалось выше, можно изучить состояния, соответствующие выходным сигналам конкретных датчиков, с тем чтобы затем использовать данные от датчиков для определения неизвестных состояний устройства. Например, во время тренировки устройство, сконфигурированное для выполнения алгоритма классификации, может столкнуться с примерами комбинаций «состояние движения/местоположение устройства», и может обработать соответствующие данные от датчиков для построения модели для каждой комбинации. Затем при представлении нового набора информации от датчиков для неизвестного состояния движения и/или местоположения устройства классификатор выбирает состояние движения и местоположение устройства, имеющее максимальные расчетные значения правдоподобия (или апостериорные вероятности, если известны априорные вероятности).
Для классификации множества состояний на основе информации от датчиков можно использовать алгоритм классификации, например байесовский классификатор. В байесовский классификатор можно подать, например, информацию от одного или нескольких датчиков для совместной классификации состояния движения и местоположения устройства на основе информации от датчиков. Это можно осуществить, например: (1) выбрав конкретную комбинацию состояния движения/местоположения устройства с максимальным совместным правдоподобием или максимальной апостериорной вероятностью; или (2) путем начальной маргинализации (то есть суммирования значений правдоподобия) по положению устройства, вычисления состояния движения с максимальным маргинальным правдоподобием или максимальной апостериорной вероятностью с последующей маргинализацией по состоянию движения и вычислением положения устройства с максимальным маргинальным правдоподобием/максимальной апостериорной вероятностью.
Два подхода, сформулированные выше, можно обобщить следующим образом. Если начать с максимизации совместного правдоподобия, то сначала выбирают состояние 


где 


где 


Обратимся далее к максимизации маргинальных правдоподобий и/или апостериорной вероятности, где сначала выбирают состояние движения согласно следующему выражению:

Затем выбирают местоположения устройства согласно выражению:

Аналогичным образом, решение задачи максимизации маргинальной апостериорной вероятности задается выражениями:
В вышеописанных двух подходах используется одинаковый набор характеристик и одинаковые статистические модели для классификации состояния движения и местоположения устройства. Однако такое общее использование приводит к значительному снижению качества классификации, так как характеристики и статистические модели, которые дают наилучшие результаты при классификации состояния движения, значительно отличаются от характеристик и статистических моделей, которые дают наилучшие результаты при классификации местоположения устройства. Например, использование метода GMM с 16 смешиваемыми компонентами может привести к точной оценке состояния движения, но к плохой оценке местоположения устройства, в то время как использование метода GMM с 2 смешиваемыми компонентами может привести к точной оценке местоположения устройства, но к плохой оценке состояния движения. В другом примере, включение конкретной характеристики 
Предложенные здесь системы и технические приемы обеспечивают множество классификаторов для классификации множества типов состояний устройств. Например, как показано в системе 40 на фиг.2, один или несколько датчиков 28 ориентации и/или другие датчики обеспечивают вывод выходных сигналов датчиков в модуль 50 классификации, который, в свою очередь, классифицирует множество типов состояний устройства, представленных выходными сигналами датчиков. Для классификации множества типов состояний устройства можно использовать соответствующее количество классификаторов, где каждый классификатор оптимизируется для вывода предполагаемого значения состояния для одного конкретного состояния. В качестве альтернативы, могут быть использованы совместные классификаторы множества состояний устройства. Например, выход датчиков может быть связан с первым набором характеристик и вторым набором характеристик, которые классифицируются модулем 52 процессора первого набора характеристик и модулем 54 процессора второго набора характеристик соответственно. Модули 52 и 54 предоставляют возможные состояния в генератор 56 предполагаемого состояния, который сконфигурирован для создания предполагаемого и/или оценочного состояния устройства исходя из указанных возможных состояний.
В примере, где рассматриваются состояния движения и местоположения, первый классификатор использует набор характеристик и статистическую модель, которая была оптимизирована для классификации состояния движения, в то время как второй классификатор использует набор характеристик и статистическую модель, которые были оптимизированы для классификации местоположения устройства. Каждый классификатор выдает совместную оценку как состояния движения, так и местоположения устройства, но первый классификатор (то есть классификатор состояния движения) отбрасывает или не учитывает свои выходные данные, касающиеся местоположения устройства, а второй классификатор (то есть классификатор местоположения устройства) отбрасывает или не учитывает свои выходные данные, касающиеся состояния движения.
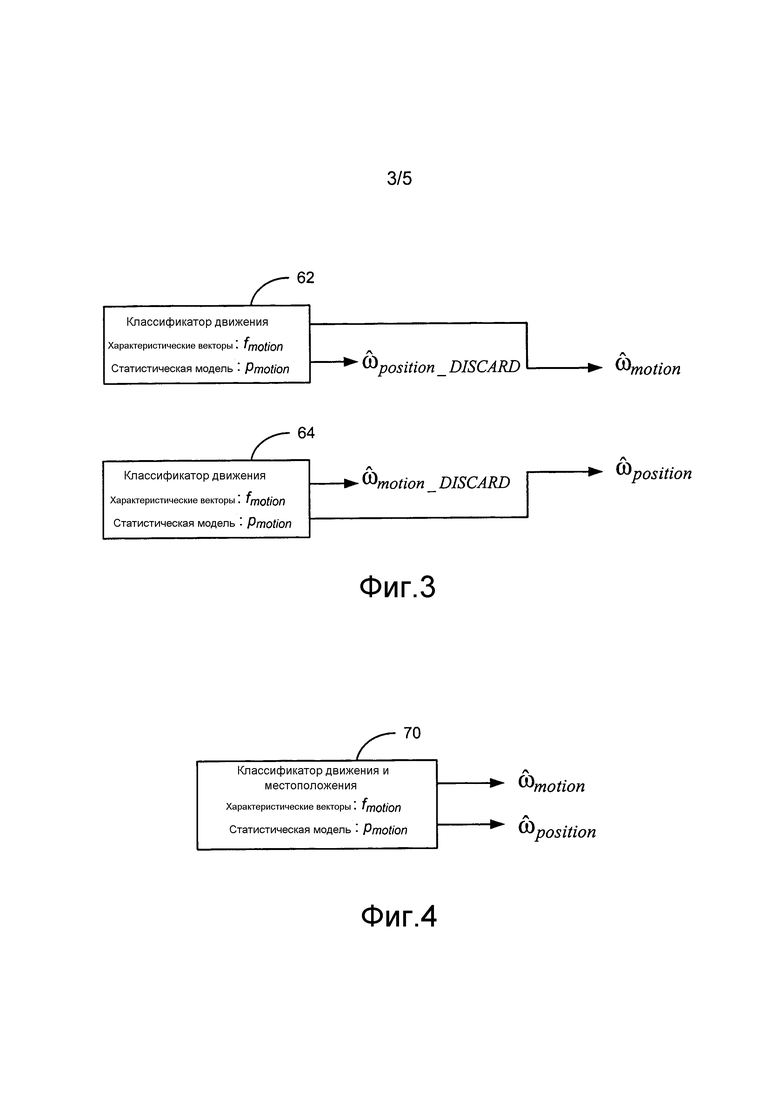
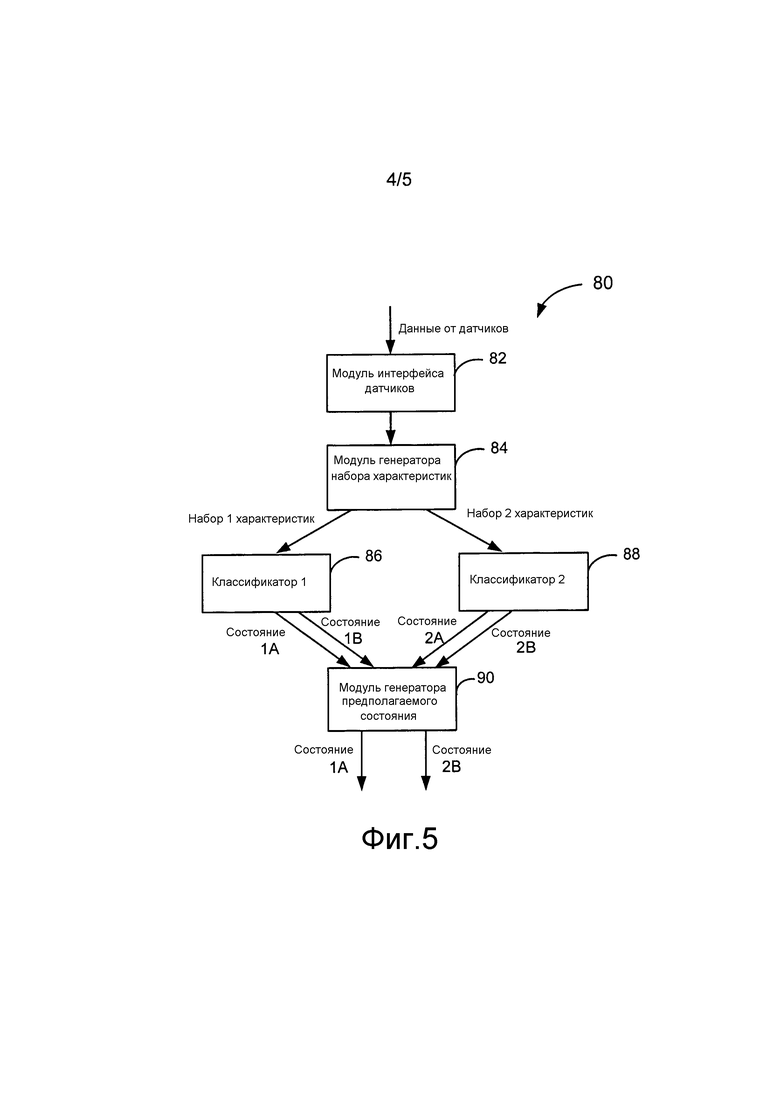
Вышеописанный подход обобщается ниже для двух вышеописанных в качестве примера классификаторов, показанных на фиг.3 в виде классификаторов 62, 64. Кроме того, указанный подход входит в противоречие с методикой, используемой одним классификатором 70, как показано на фиг.4. Вышеописанный подход иллюстрируется с использованием следующих алгоритмов: (1) максимизации совместного правдоподобия отдельными классификаторами и (2) максимизации маргинальных правдоподобий и/или апостериорных вероятностей отдельными классификаторами. Также возможно применение других алгоритмов.
Обратимся сначала к максимизации совместного правдоподобия отдельными классификаторами, где состояние 

а местоположение

где 





Аналогичным образом, решение задачи максимизации совместной апостериорной вероятности задается следующим выражением:

для состояния движения, и:

для местоположения устройства.
Обратимся теперь к случаю, когда при нахождении максимальных маргинальных правдоподобий и/или апостериорных вероятностей отдельными классификаторами состояние движения первоначально выбирают, используя следующее выражение:

Далее выбирают местоположение устройства, используя следующее выражение:

Аналогичным образом, решение задачи максимизации маргинальной апостериорной вероятности задается следующими выражениями:
Последующий пример иллюстрирует методики, описанные выше применительно к устройству с многоосным акселерометром, при использовании двух алгоритмов байесовской классификации. Каждый из этих двух алгоритмов классификации сконфигурирован для классификации двух типов состояния: состояние движения и состояние местоположения. Однако, как было описано выше, один алгоритм классификации оптимизируют для классификации движения, а другой алгоритм классификации оптимизируют для классификации местоположения. В данном примере устройство имеет два возможных состояния движения (пользователь сидит и пользователь идет) и два возможных состояния местоположения (в руке пользователя и в кармане пользователя). В результате имеются четыре возможных комбинации: сидит/в руке, сидит/в кармане, идет/в руке, идет/в кармане.
Разные состояния движения соответствуют разным профилям акселерометра. Например, состояние «сидит» и состояние «идет» можно различить путем обработки дисперсии выхода акселерометра на отрезке времени сбора данных. Однако дисперсия выхода акселерометра обычно мало чувствительна к изменению местоположения. Следовательно, дисперсия выхода акселерометра возможно не обеспечит определение с высоким доверительным уровнем того, находится ли устройство в руке пользователя или в кармане пользователя.
В отличие от этого, разные состояния местоположения обычно соответствуют разным ориентациям устройства. Для примера, связанного с использованием многоосного акселерометра, среднее соотношение ускорения между осями акселерометра указывает на ориентацию устройства и может быть использовано для дифференциации состояний местоположения с относительно высоким доверительным уровнем, в то время как определение состояния движения устройства будет отличаться относительно низким доверительным уровнем.
В текущем примере в одном из двух алгоритмов классификации используется набор характеристик и статистическая модель, сконфигурированная для определения состояния движения устройства с высоким доверительным уровнем, в то время в другом алгоритме используется набор характеристик и статистическая модель, сконфигурированная для определения состояния местоположения устройства с высоким доверительным уровнем. В наборе характеристик классификатора движения используется выход акселерометра для определения дисперсии выхода акселерометра в течение некоторого временного интервала, и определяется предполагаемое значение состояния движения с относительно высоким доверительным уровнем, в то время как предполагаемое значение состояния местоположения определяется с относительно низким доверительным уровнем. Предполагаемое значение состояния местоположения отбрасывается или не учитывается. В наборе характеристик классификатора местоположения используется выход акселерометра для определения среднего соотношения ускорения между осями акселерометра, и определяется предполагаемое значение состояния местоположения с относительно высоким доверительным уровнем, в то время как предполагаемое значение состояния движения определяется с относительно низким доверительным уровнем. Предполагаемое значение состояния движения отбрасывается или не учитывается.
Вышеописанная методика позволяет обеспечить выходные данные, иллюстрируемые таблицей 1, приведенной ниже:
Выходные данные пары классификаторов
Как показано в таблице 1, и классификатор движения, и классификатор местоположения определяют, что значением состояния движения является «сидит». Классификатор движения определяет, что значением состояния местоположения устройства является «в кармане», в то время как классификатор местоположения определяет, что значением состояния местоположения устройства является «в руке». Результирующее состояние устройства характеризуется тем, что пользователь сидит и держит устройство в руке, поскольку выход классификатора движения для местоположения отброшен.
Для точной классификации состояний устройства можно выполнить обучение алгоритмов классификации. Например, данные от датчиков можно получить, когда устройство находится в кармане пользователя, и полученные данные можно использовать для установки одного или нескольких параметров алгоритмов классификации, чтобы впоследствии иметь возможность определить, что информация от датчиков указывает на значение «в кармане» состояния местоположения. Информацию от датчиков можно собирать для комбинаций состояний движения/местоположения (например, стоит/в руке, идет/в руке, стоит/в кармане, идет/в кармане) для создания отдельных наборов характеристик и статистических моделей для каждого классификатора на основе информации из известных состояний движения/местоположения.
Такого рода «обучение» можно выполнить перед использованием классификаторов для классификации неизвестных состояний движения/местоположения. В некоторых вариантах обучение может осуществляться после первоначального использования. Например, пользователь может быть способен (и/или получить подсказку) указать значение конкретного типа состояния на основе неточных результатов, неоднозначных результатов или при иных обстоятельствах.
Хотя в вышеуказанном примере используются два типа состояний (то есть состояние движения и состояние местоположения), возможна классификация более двух типов состояний устройства, причем каждый тип состояния устройства может иметь свою собственную группу возможных состояний. Кроме того, каждая группа возможных состояний может включать в себя любое количество состояний. Вдобавок для некоторых типов состояний может использоваться только информация от датчика движения, в то время как для других типов состояний может использоваться информация от датчиков параметров окружающей среды или других датчиков вместо или вдобавок к информации от датчиков движения. Как было описано выше, также возможны и другие методики.
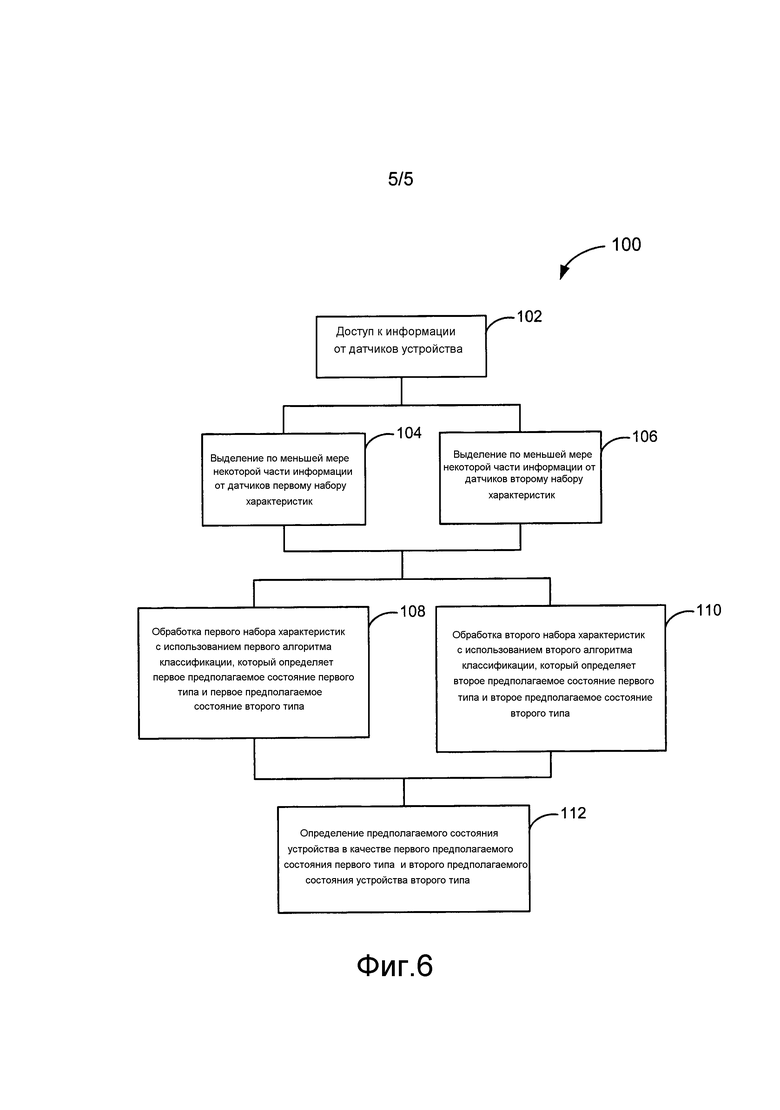
Далее обратимся к фиг.5, где система 80 для классификации множества состояний устройства включает в себя модуль 82 интерфейса датчиков, сконфигурированный для реализации доступа к информации об устройстве от датчиков (например, выходные сигналы датчиков, генерируемые одним или несколькими датчиками). Генератор 84 набора характеристик создает соответствующую информацию от датчиков, указывающую выход датчиков по меньшей мере с первым набором характеристик и вторым набором характеристик, так что по меньшей мере некоторая часть информации от датчиков связана с первым набором характеристик и по меньшей мере некоторая часть информации от датчиков связана со вторым набором характеристик.
Первый набор характеристик и второй набор характеристик обрабатываются первым классификатором 86 и вторым классификатором 88 соответственно. Первый классификатор 86 обрабатывает первый набор характеристик, используя первый алгоритм классификации, который сконфигурирован для определения первого предполагаемого состояния первого типа (например, движение и т.д.) и первое предполагаемое состояние второго типа (например, местоположение и т.д.). Эти предполагаемые состояния показаны на фиг.5 в виде состояний 1А и 1В соответственно. Второй классификатор 88 обрабатывает второй набор характеристик, используя второй алгоритм классификации, который сконфигурирован для определения второго предполагаемого состояния первого типа и второго предполагаемого состояния второго типа. Эти предполагаемые состояния показаны на фиг.5 в виде состояний 2А и 2В соответственно. На основе этих предполагаемых состояний на выходе классификаторов 86, 88 модуль 56 генератора предполагаемых состояний определяет предполагаемое состояние устройства в виде первого предполагаемого состояния первого типа и второго предполагаемого состояния второго типа (то есть состояния 1А и 2В).
Все либо часть модулей, показанных на фиг.5, можно реализовать, в целом или частично, с помощью модуля 50 классификации в виде автономных компонент, и т.д. Например, модуль 50 классификации может реализовать функциональные возможности классификаторов 86, 88 (например, посредством модуля 52 процессора первого набора характеристик и модуля 54 процессора второго набора характеристик) и модуля 56 генератора предполагаемого состояния. Кроме того, модули, показанные на фиг.2 и 5, могут быть реализованы аппаратными средствами, программными средствами (например, с помощью процессора 20, выполняющего команды программных средств 24, хранящихся в памяти 22) или с помощью комбинации аппаратных средств и программных средств.
Обратимся к фиг.6, а также еще раз к фиг.1-5, где процесс 100 классификации множества состояний, связанных с устройством, включает в себя указанные шаги. Однако процесс 100 является лишь примером, а не ограничением. Процесс 100 можно видоизменить, например, путем добавления новых шагов, удаления шагов, перекомпоновки шагов, объединения шагов и/или одновременного выполнения ряда шагов. Как здесь показано и описано, возможны и другие изменения в процессе 100.
На шаге 102 осуществляется доступ к информации от датчиков устройства (например, выходы одного или нескольких датчиков 28 ориентации и/или других датчиков). Указанный доступ может выполняться, например, модулем 50 классификации, модулем 82 интерфейса датчиков и т.д.
После шага 102 процесс 100 продолжается на шагах 104 и 106, где по меньшей мере некоторая часть информации от датчиков, к которой был реализован доступ на шаге 102, выделяется первому набору характеристик и второму набору характеристик соответственно. Связи между информацией от датчиков и наборами характеристик могут устанавливаться модулем 84 генератора наборов характеристик, соответствующими классификаторами 86, 88, сконфигурированными для обработки соответствующих наборов характеристик, и т.д.
После выполнения шагов 104 и 106 процесс 100 продолжается на шагах 108 и 110. На шаге 108 обрабатывается первый набор характеристик (например, модулем 52 процессора первого набора характеристик, классификатором 86 и т.д.) с использованием первого алгоритма классификации, который сконфигурирован для определения первого предполагаемого состояния первого типа и первого предполагаемого состояния второго типа. На шаге 110 обрабатывается второй набор характеристик (например, модулем 54 процессора второго набора характеристик, классификатором 88 и т.д.) с использованием второго алгоритма классификации, который сконфигурирован для определения второго предполагаемого состояния первого типа и второго предполагаемого состояния второго типа. Затем процесс 100 переходит к заключительному шагу 112, где определяется предполагаемое состояние устройства (например, модулем 56 генератора предполагаемого состояния) в виде первого предполагаемого состояния первого типа, определенного на шаге 108, и второго предполагаемого состояния второго типа, определенного на шаге 110.
Одна или несколько компонент, шагов, характеристик и/или функций, показанных на фиг.1, 2, 3, 4, 5 и/или 6, могут быть перекомпонованы и/или объединены в единую компоненту, шаг, характеристику или функцию, или могут быть воплощены в виде нескольких компонент, шагов или функций. Также могут быть добавлены дополнительные элементы, компоненты, шаги и/или функции, если это не приведет к выходу за рамки объема изобретения. Устройство в целом, отдельные устройства и/или компоненты, показанные на фиг.1, 2, 3, 4 и/или 5, могут быть сконфигурированы для выполнения одного или нескольких способов, функций или шагов, описанных на фиг.6. Описанные здесь новые алгоритмы также можно эффективно реализовать программными средствами и/или встроенными аппаратным средствами.
Также заметим, что по меньшей мере некоторые реализации были описаны здесь в виде процесса, изображенного в виде блок-схемы, структурной схемы или функциональной схемы. Хотя блок-схема может описать операции в виде последовательного процесса, многие из этих операций могут выполняться параллельно или одновременно. Вдобавок порядок выполнения операций может быть изменен. Процесс завершается по завершении всех операций. Процесс может соответствовать способу, функции, процедуре, алгоритму, подпрограмме и т.д. Когда процесс соответствует функции, завершение выполнения этой функции соответствует возврату к выполнению вызывающей функции или основной функции.
Кроме того, варианты изобретения можно реализовать аппаратными средствами, программными средствами, программно-аппаратными средствами, программными средствами промежуточного уровня, в виде микрокода или с помощью любой комбинации из вышеперечисленных средств. При реализации программными средствами, программно-аппаратными средствами, промежуточными программными средствами или с помощью микрокода, программный код или сегменты кода для выполнения необходимых задач могут храниться на машинно-считываемом носителе, таком как носитель данных или другое запоминающее устройство (устройства). Процессор может выполнять необходимые задачи. Сегмент кода может представлять процедуру, функцию, подпрограмму, программу, стандартную программу, стандартную подпрограмму, модуль, пакет программного обеспечения, класс или любую комбинацию команд, структур данных или программных операторов. Сегмент кода может быть связан с другим сегментом кода или аппаратной схемой путем проводки и/или приема информации, данных, аргументов, параметров или контента памяти. Информация, аргументы, параметры, данные и т.д. могут проводиться, направляться или передаваться с применением любых подходящих средств, в том числе путем совместного использования памяти, проводки сообщений, проводки маркеров, передачи через сеть и т.д.
Термины «машинно-считываемый носитель», «считываемый компьютером носитель» и/или «считываемый процессором носитель» могут включать в себя, но не только: портативные или стационарные запоминающие устройства, оптические запоминающие устройства и различные другие носители долговременного хранения, способные запоминать, хранить или переносить команду (команды) и/или данные. Таким образом, различные описанные здесь способы могут быть частично или полностью реализованы с помощью команд и/или данных, которые могут запоминаться на «машинно-считываемом носителе», «считываемом компьютером носителе» и/или «считываемом процессором носителе» и выполняться одним или несколькими процессорами, машинами и/или устройствами.
Способы или алгоритмы, описанные в связи с раскрытыми здесь примерами, могут быть воплощены непосредственно аппаратными средствами, в виде программного модуля, исполняемого процессором, или в виде комбинации того и другого в форме обрабатывающего блока, программных команд или других указаний, причем они могут находиться в одном устройстве или распределены по множеству устройств. Программный модуль может находиться в памяти RAM, флэш-памяти, памяти ROM, памяти EPROM, памяти EEPROM, регистрах, жестком диске, съемном диске, компакт-диске (CD-ROM) или на носителе любого другого типа, известного в данной области техники. Носитель данных может быть соединен с процессором, так что процессор может считывать с него информацию и производить на него запись информации. В качестве альтернативы, носитель данных может составлять с процессором единое целое.
Специалистам в данной области техники очевидно, что различные приведенные в качестве примера логические блоки, модули, схемы и шаги алгоритмов, описанные в связи с раскрытыми здесь вариантами, можно реализовать в виде электронных аппаратных средств, компьютерного программного обеспечения или их комбинаций. Для наглядной иллюстрации этой взаимозаменяемости аппаратных и программных средств различные приведенные в качестве примера компоненты, блоки, модули, схемы и шаги были описаны выше в целом с точки зрения их функциональных возможностей. Независимо от реализованных функциональных возможностей аппаратные средства или программные средства зависят от конкретного приложения и проектных ограничений, наложенных на систему в целом.
Различные описанные здесь признаки изобретения можно реализовать в разных системах, не выходя за рамки объема изобретения. Следует заметить, что вышеописанные варианты являются лишь примерами, и их не следует трактовать как ограничение изобретения. Здесь предполагается, что описание вариантов осуществления изобретения носит исключительно иллюстративный характер и не ограничивает объем формулы изобретения. Основные принципы настоящего изобретения можно без труда применить к другим типам устройств, причем специалистам в данной области техники очевидны многие альтернативные варианты, модификации и версии.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УСТРОЙСТВА ДЛЯ ОЧИСТКИ ПОЛОСТИ РТА | 2017 |
|
RU2763901C2 |
| КОНТЕКСТНОЕ ЗОНДИРОВАНИЕ ДЛЯ КОМПЬЮТЕРНЫХ УСТРОЙСТВ | 2012 |
|
RU2621013C2 |
| ОБРАБОТКА ИНФОРМАЦИИ ДАТЧИКА | 2014 |
|
RU2622880C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОБЪЕДИНЕНИЯ КЛИНИЧЕСКИХ ПРИЗНАКОВ И ПРИЗНАКОВ ИЗОБРАЖЕНИЙ ДЛЯ ДИАГНОСТИКИ С ПРИМЕНЕНИЕМ КОМПЬЮТЕРА | 2009 |
|
RU2533500C2 |
| КЛАССИФИКАЦИЯ КАСАНИЙ | 2015 |
|
RU2711029C2 |
| НАСТРАИВАЕМЫЙ АЛГОРИТМ ПЕРЕХОДА, ИСПОЛЬЗУЮЩИЙ КЛАССИФИКАЦИЮ ДВИЖЕНИЯ И СОСТОЯНИЕ ПАЦИЕНТА | 2016 |
|
RU2713749C2 |
| УСТРОЙСТВО, СПОСОБ И КОМПЬЮТЕРНАЯ ПРОГРАММА ДЛЯ ОБЕСПЕЧЕНИЯ ПРЕДОСТАВЛЕНИЯ ИНФОРМАЦИИ ПОЛЬЗОВАТЕЛЮ | 2014 |
|
RU2601152C2 |
| ВЫЯВЛЕНИЕ КИТАЙСКОЙ, ЯПОНСКОЙ И КОРЕЙСКОЙ ПИСЬМЕННОСТИ | 2013 |
|
RU2613847C2 |
| КОМПЬЮТЕРИЗИРОВАННОЕ ИНСТРУМЕНТАЛЬНОЕ СРЕДСТВО ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ И МЕДИЦИНСКОЕ УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ РАСЧЕСОВ И ПРОГНОЗИРОВАНИЯ ПОКРАСНЕНИЙ | 2021 |
|
RU2818831C1 |
| НЕЗАВИСИМАЯ ОТ ДАТЧИКА ИДЕНТИФИКАЦИЯ НЕИСПРАВНОСТИ МЕХАНИЧЕСКОГО СТАНКА | 2020 |
|
RU2795745C1 |
Изобретение относится к портативным устройствам. Технический результат заключается в повышении точности классификации состояний устройства. Такой результат достигается тем, что реализуют доступ к информации от датчиков устройства, где часть информации от датчиков используется в первом наборе характеристик и некоторая часть информации от датчиков используется во втором наборе характеристик, обрабатывают первый набор характеристик с использованием первого алгоритма классификации, сконфигурированного для определения первого предполагаемого состояния первого типа и первого предполагаемого состояния второго типа, обрабатывают второй набор характеристик с использованием второго алгоритма классификации, сконфигурированного для определения второго алгоритма классификации, сконфигурированного для определения второго предполагаемого состояния первого типа и второго предполагаемого состояния второго типа, и определяют предполагаемое состояние устройства как первое предполагаемое состояние первого типа и второе предполагаемое состояние второго типа. 4 н. и 26 з.п. ф-лы, 6 ил., 1 табл.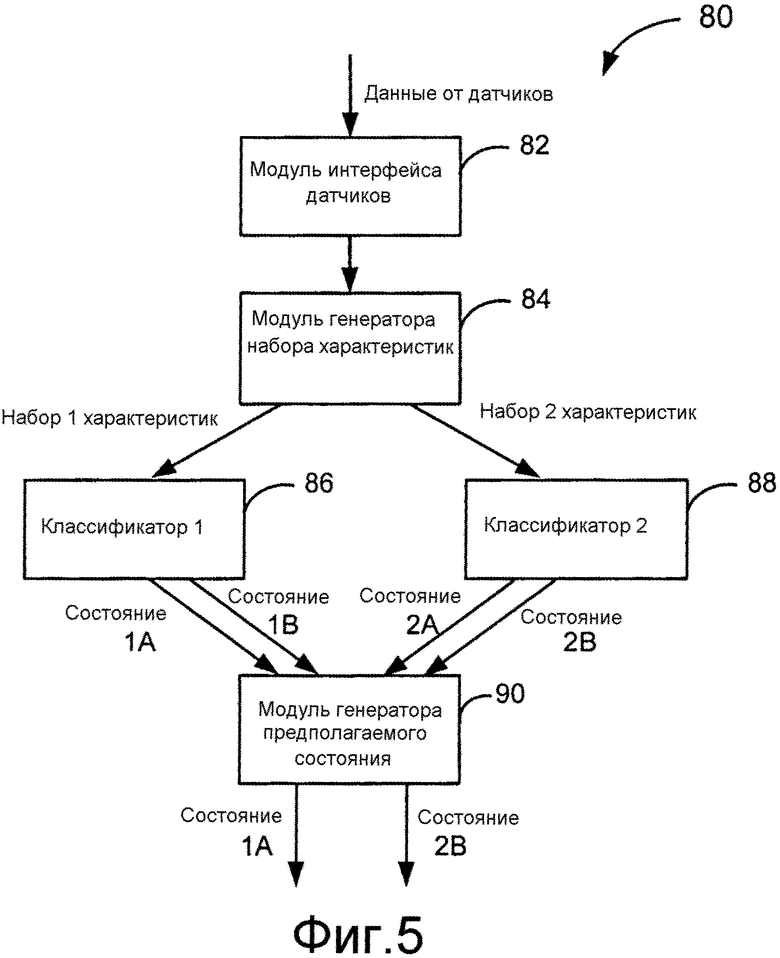
1. Способ классификации множества типов состояний для устройства, причем способ содержит этапы, на которых:
реализуют доступ к информации датчиков от множества датчиков устройства, при этом по меньшей мере некоторая часть информации датчиков используется в первом наборе информации датчиков и по меньшей мере некоторая часть информации датчиков используется во втором наборе информации датчиков;
обрабатывают первый набор информации датчиков с использованием первого алгоритма классификации, причем первый алгоритм классификации сконфигурирован для определения первого предполагаемого состоянии первого типа и первого предполагаемого состояния второго типа;
обрабатывают второй набор информации датчиков с использованием второго алгоритма классификации, причем второй алгоритм классификации сконфигурирован для определения второго предполагаемого состояния первого типа и второго предполагаемого состояния второго типа; и
определяют, после завершения обработки первого набора информации датчиков и обработки второго набора информации датчиков, предполагаемое состояние устройства как первое предполагаемое состояние первого типа и второе предполагаемое состояние второго типа на основе результатов обработки первого набора информации датчиков и обработки второго набора информации датчиков.
2. Способ по п. 1, в котором первым типом состояния является состояние движения, а вторым типом состояния является состояние местоположения.
3. Способ по п. 2, в котором:
информация датчиков, используемая в первом наборе информации датчиков, включает в себя выход акселерометра, и
первый набор информации датчиков включает в себя дисперсию выхода акселерометра на временном интервале.
4. Способ по п. 2, в котором:
информация датчиков, используемая во втором наборе информации датчиков, включает в себя выход акселерометра для множества осей акселерометра многоосного акселерометра, имеющего по меньшей мере первую ось и вторую ось, и
второй набор информации датчиков включает в себя усредненное соотношение ускорения между двумя осями многоосного акселерометра.
5. Способ по п. 1, в котором первый алгоритм классификации содержит алгоритм максимального совместного правдоподобия, использующий первый набор информации датчиков и первую функцию распределения вероятности.
6. Способ по п. 1, в котором первый алгоритм классификации содержит алгоритм максимальной маргинальной апостериорной вероятности, использующий первый набор информации датчиков и первую функцию распределения вероятности.
7. Способ по п. 1, в котором второй алгоритм классификации содержит алгоритм максимального совместного правдоподобия, использующий второй набор информации датчиков и вторую функцию распределения вероятности.
8. Способ по п. 1, в котором второй алгоритм классификации содержит алгоритм максимальной маргинальной апостериорной вероятности, использующий второй набор информации датчиков и вторую функцию распределения вероятности.
9. Способ по п. 1, в котором первый алгоритм классификации и второй алгоритм классификации, каждый, содержат байесовский классификатор.
10. Мобильное устройство, содержащее:
один или более датчиков, сконфигурированных с возможностью генерирования выхода датчиков;
модуль генератора набора характеристик, соединенный с возможностью связи с одним или более датчиками и сконфигурированный с возможностью связывания соответствующей информации датчиков, указывающей выход датчиков, с по меньшей мере одним из первого набора информации датчиков и второго набора информации датчиков; и
модуль классификации, соединенный с возможностью связи с модулем генератора набора характеристик и сконфигурированный с возможностью выполнения операций, содержащих:
обработку первого набора информации датчиков с использованием первого алгоритма классификации, причем первый алгоритм классификации сконфигурирован для определения первого предполагаемого состояния первого типа и первого предполагаемого состояния второго типа,
обработку второго набора информации датчиков с использованием второго алгоритма классификации, причем второй алгоритм классификации сконфигурирован для определения второго предполагаемого состояния первого типа и второго предполагаемого состояния второго типа, причем первое предполагаемое состояние первого типа отлично от второго предполагаемого состояния первого типа, и
определение предполагаемого состояния устройства как первого предполагаемого состояния первого типа и второго предполагаемого состояния второго типа.
11. Устройство по п. 10, в котором первым типом состояния является состояние движения, а вторым типом состояния является состояние местоположения.
12. Устройство по п. 11, в котором:
один или более датчиков включают в себя один или несколько акселерометров,
информация датчиков, используемая в первом наборе информации датчиков, включает в себя выход акселерометра, и
первый набор информации датчиков включает в себя дисперсию выхода акселерометра на временном интервале.
13. Устройство по п. 11, в котором:
один или более датчиков включают в себя один или более акселерометров,
информация датчиков, используемая во втором наборе информации датчиков, включает в себя выход акселерометра для множества осей акселерометра многоосного акселерометра, имеющего по меньшей мере первую ось и вторую ось, и
второй набор информации датчиков включает в себя усредненное соотношение ускорения между двумя осями многоосного акселерометра.
14. Устройство по п. 10, в котором первый алгоритм классификации содержит алгоритм максимального совместного правдоподобия, использующий первый набор информации датчиков и первую функцию распределения вероятности.
15. Устройство по п. 10, в котором первый алгоритм классификации содержит алгоритм максимальной маргинальной апостериорной вероятности, использующий первый набор информации датчиков и первую функцию распределения вероятности.
16. Устройство по п. 10, в котором второй алгоритм классификации содержит алгоритм максимального совместного правдоподобия, использующий второй набор информации датчиков и вторую функцию распределения вероятности.
17. Устройство по п. 10, в котором второй алгоритм классификации содержит алгоритм максимальной маргинальной апостериорной вероятности, использующий второй набор информации датчиков и вторую функцию распределения вероятности.
18. Устройство по п. 10, в котором первый алгоритм классификации и второй алгоритм классификации, каждый, содержат байесовский классификатор.
19. Мобильное устройство, содержащее:
средство для реализации доступа к информации датчиков устройства;
средство для связывания по меньшей мере некоторой части информации датчиков с первым набором информации датчиков;
средство для связывания по меньшей мере некоторой части информации датчиков со вторым набором информации датчиков;
средство для обработки первого набора информации датчиков с использованием первого алгоритма классификации, причем первый алгоритм классификации сконфигурирован для определения первого предполагаемого состоянии первого типа и первого предполагаемого состояния второго типа;
средство для обработки второго набора информации датчиков с использованием второго алгоритма классификации, причем второй алгоритм классификации сконфигурирован для определения второго предполагаемого состояния первого типа и второго предполагаемого состояния второго типа, причем первое предполагаемое состояние первого типа отлично от второго предполагаемого состояния первого типа; и
средство для определения предполагаемого состояния устройства как первого предполагаемого состояния первого типа и второго предполагаемого состояния второго типа.
20. Устройство по п. 19, в котором первым типом состояния является состояние движения, а вторым типом состояния является состояние местоположения.
21. Устройство по п. 20, в котором:
информация датчиков, связанная с первым набором информации датчиков, включает в себя выход акселерометра, и
первый набор информации датчиков включает в себя дисперсию выхода акселерометра на временном интервале.
22. Устройство по п. 20, в котором:
информация датчиков, связанная со вторым набором информации датчиков, включает в себя выход акселерометра для множества осей акселерометра многоосного акселерометра, имеющего по меньшей мере первую ось и вторую ось, и
второй набор информации датчиков включает в себя усредненное соотношение ускорения между двумя осями многоосного акселерометра.
23. Устройство по п. 19, в котором:
первый алгоритм классификации содержит по меньшей мере один из алгоритмов: алгоритм максимального совместного правдоподобия или алгоритм максимальной маргинальной апостериорной вероятности, и
первый алгоритм классификации использует первый набор информации датчиков и первую функцию распределения вероятности.
24. Устройство по п. 19, в котором:
второй алгоритм классификации содержит по меньшей мере один из алгоритмов: алгоритм максимального совместного правдоподобия или алгоритм максимальной маргинальной апостериорной вероятности, и
второй алгоритм классификации использует второй набор информации датчиков и вторую функцию распределения вероятности.
25. Машиночитаемый носитель информации, содержащий компьютерный программный продукт, который содержит считываемые процессором команды, сконфигурированные для инициирования:
реализации доступа процессором к информации датчиков устройства, причем по меньшей мере некоторая часть информации датчиков используется в первом наборе характеристик и по меньшей мере некоторая часть информации датчиков используется во втором наборе характеристик;
обработки процессором первого набора характеристик с использованием первого алгоритма классификации, сконфигурированного для определения первого предполагаемого состояния первого типа и первого предполагаемого состояния второго типа;
обработки процессором второго набора характеристик с использованием второго алгоритма классификации, сконфигурированного для определения второго предполагаемого состояния первого типа и второго предполагаемого состояния второго типа, причем первое предполагаемое состояние первого типа отлично от второго предполагаемого состояния первого типа; и
определения процессором предполагаемого состояния устройства как первого предполагаемого состояния первого типа и второго предполагаемого состояния второго типа.
26. Машиночитаемый носитель информации по п. 25, в котором первым типом состояния является состояние движения, а вторым типом состояния является состояние местоположения.
27. Машиночитаемый носитель информации по п. 26, в котором:
информация датчиков, используемая в первом наборе характеристик, включает в себя выход акселерометра, и
первый набор характеристик включает в себя дисперсию выхода акселерометра на временном интервале.
28. Машиночитаемый носитель информации по п. 26, в котором:
информация датчиков, используемая во втором наборе характеристик, включает в себя выход акселерометра для множества осей акселерометра многоосного акселерометра, имеющего по меньшей мере первую ось и вторую ось, и
второй набор характеристик включает в себя усредненное соотношение ускорения между двумя осями многоосного акселерометра.
29. Машиночитаемый носитель информации по п. 25, в котором:
первый алгоритм классификации содержит по меньшей мере один из алгоритмов: алгоритм максимального совместного правдоподобия или алгоритм максимальной маргинальной апостериорной вероятности, и
первый алгоритм классификации использует первый набор характеристик и первую функцию распределения вероятности.
30. Машиночитаемый носитель информации по п. 25, в котором:
второй алгоритм классификации содержит по меньшей мере один из алгоритмов: алгоритм максимального совместного правдоподобия или алгоритм максимальной маргинальной апостериорной вероятности, и
второй алгоритм классификации использует второй набор характеристик и вторую функцию распределения вероятности.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| US 7154477 B1, 26.12.2006 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 5059127 A, 22.10.1991 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| СИСТЕМА, СПОСОБ И ИНТЕРФЕЙС ДЛЯ ОБЕСПЕЧЕНИЯ ПЕРСОНАЛИЗИРОВАННОГО ПОИСКА И ДОСТУПА К ИНФОРМАЦИИ | 2005 |
|
RU2419858C2 |

