ОБЛАСТЬ ТЕХНИКИ
[0001] Данное техническое решение относится к области железнодорожного транспорта, в частности к способам и устройствам на железнодорожном транспорте, направленных на увеличение энергоэффективности и увеличение пропускной способности на железнодорожном транспорте, что обеспечивает уменьшение издержек при перевозках.
УРОВЕНЬ ТЕХНИКИ
[0002] Из уровня техники известен патент US 13420820 «Способ изменения поведения транспортного средства, основанного на предсказании поведения других транспортных средств», патентообладатель: Google Inc., дата приоритета: 03.10.2013. В указанном способе на основе предсказания того, как будут вести себя соседние транспортные средства, корректируют режим движения. Для этого определяется координата, окружающая среда (по крайней мере другое транспортное средство); вводится доверительная вероятность того, что, хотя бы одно соседнее транспортное средство будет вести себя «предсказуемо». Далее на основе информации о другом транспортном средстве (координата, скорость, ускорение, полоса движения, препятствие) и вероятности предсказания его движения корректируется управление транспортным средством.
[0003] В указанном патенте вводится вероятность того, что, хотя бы одно транспортное средство, участвующее в движении, будет вести себя предсказуемо. В заявляемом техническом решении на основе информации о том, как уже проехал подвижной состав, корректируется движение поездов, следующих за ним.
[0004] Например, в указанном патенте: автомобиль А будет ехать со скоростью 60 км/ч. И на основе этого корректируется режим ведения автомобиля В.
[0005] В заявляемом техническом решении фиксируется, что, например, поезд А буксовал при скорости 50 км/ч и силе тяги 450 кН, а также рассчитывается, что при массе 6000 тонн и силе тяги 450 кН поезд В не сможет проехать со скоростью, выше 45 км/ч. Однако в расписании заложено, что поезд должен ехать этот участок со скоростью не менее 47 км/ч. Из этого следует, что поезд В должен либо быть меньше загружен (например, иметь массу 4500 тонн) или иметь больше времени (или меньше расчетную скорость).
[0006] Также из предшествующего уровня техники известен патент US 8639644 В1 «Робот для использования облачных систем вычисления», патентообладатель: Google Inc., дата приоритета: 06.05.2011. Данный робот уточняет и верифицирует базу данных объектов. Робот смотрит, делает запрос в БД, получает сигнал, получает данные об уточняемом объекте, уточняет новые данные, возвращает информацию (уточненную) в БД.
[0007] Недостатком является то, что основе «взгляда» робота невозможно определить точнее коэффициент сцепления, сопротивление движению поезда, которые непосредственно участвуют в расчете энергооптимального режима движения, графика движения, составности поезда (массы и длины).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0008] Данное изобретение направлено на устранение недостатков, присущих существующим решениям.
[0009] Техническим результатом является увеличение энергоэффективности и увеличение пропускной способности на железнодорожном транспорте, что обеспечивает уменьшение издержек на перевозках.
[00010] Указанный технический результат достигается благодаря уточнению параметров поезда и среды его функционирования (вектора параметров зависимости сопротивления движению, кривой буксования и скольжения; массы подвижного состава).
[00011] Также технический результат достигается благодаря способу повышения эффективности движения железнодорожного транспорта на участке пути, в котором получают вектор параметров сцепления, коэффициент сцепления, кривую скольжения, массу и точность выполнения расписания железнодорожного транспорта; после чего уточняют параметры сцепления одного железнодорожного транспорта на основании данных, полученных на предыдущем шаге, затем определяют на заданном участке пути максимально допустимый вес железнодорожного транспорта и минимально возможное время пути при максимально допустимом весе, на основе данных, полученных на предыдущем шаге, далее передают значения, полученные на предыдущем шаге, в пункт управления движением с железнодорожного транспорта, после чего корректируют в пункте управления движением расписание движения и составность железнодорожного транспорта, следующего за вышеуказанным, и в итоге передают расписание движения и составность транспорта с пункта управления движением по крайней мере одной железнодорожной станции и по крайней мере одному железнодорожному транспорту, следующему за вышеуказанным.
[00012] В некоторых вариантах осуществления технического решения уточняют параметры сцепления в каждой координате пути.
[00013] В некоторых вариантах осуществления технического решения уточняют параметры сцепления на заданных участках пути.
[00014] В некоторых вариантах осуществления технического решения при уточнении параметров сцепления, параметрами сцепления являются зависимости кривой буксования или кривой скольжения от скорости поезда.
[00015] В некоторых вариантах осуществления технического решения после вычисления минимального времени движения на участке пути, максимальной скорости движения, полученные значения передают в систему составления расписания.
[00016] В некоторых вариантах осуществления технического решения после получения минимального времени движения на участке пути, максимальной скорости движения, корректируют расписание и составность поездов.
[00017] В некоторых вариантах осуществления технического решения после вычисления минимального времени движения на участке пути, максимальной скорости движения, полученные значения передаются другим поездам и используются для расчета энергооптимального режима управления.
[00018] В некоторых вариантах осуществления технического решения вычисляют минимальное время движения, максимальную скорость движения на участке пути.
[00019] В некоторых вариантах осуществления технического решения вычисляют минимальное время движения, максимальную скорость движения в каждой координате пути.
[00020] В некоторых вариантах осуществления технического решения уточненные параметры передаются в систему составления расписания и используются для корректировки расписания и составности (массы и количества вагонов) других поездов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[00021] Признаки и преимущества настоящего изобретения станут очевидными из приводимого ниже подробного описания изобретения и прилагаемых чертежей, на которых:
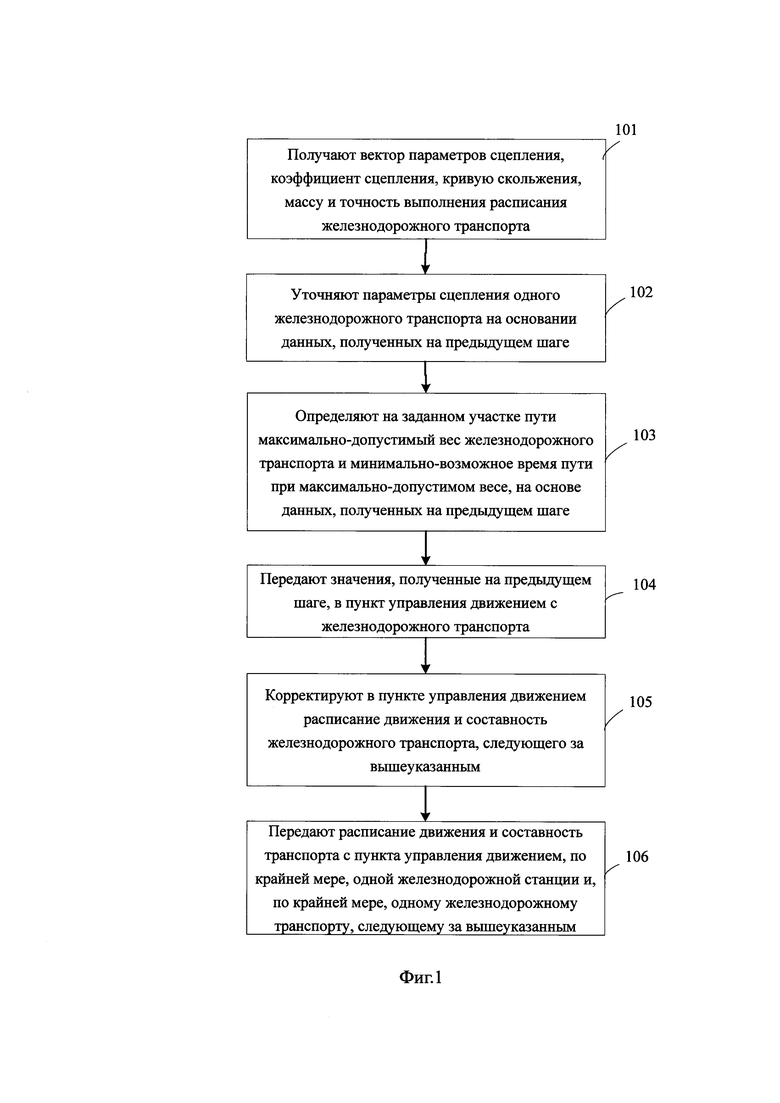
[00022] Фиг. 1 представляет собой пример осуществления способа повышения эффективности движения железнодорожного транспорта на участке пути;
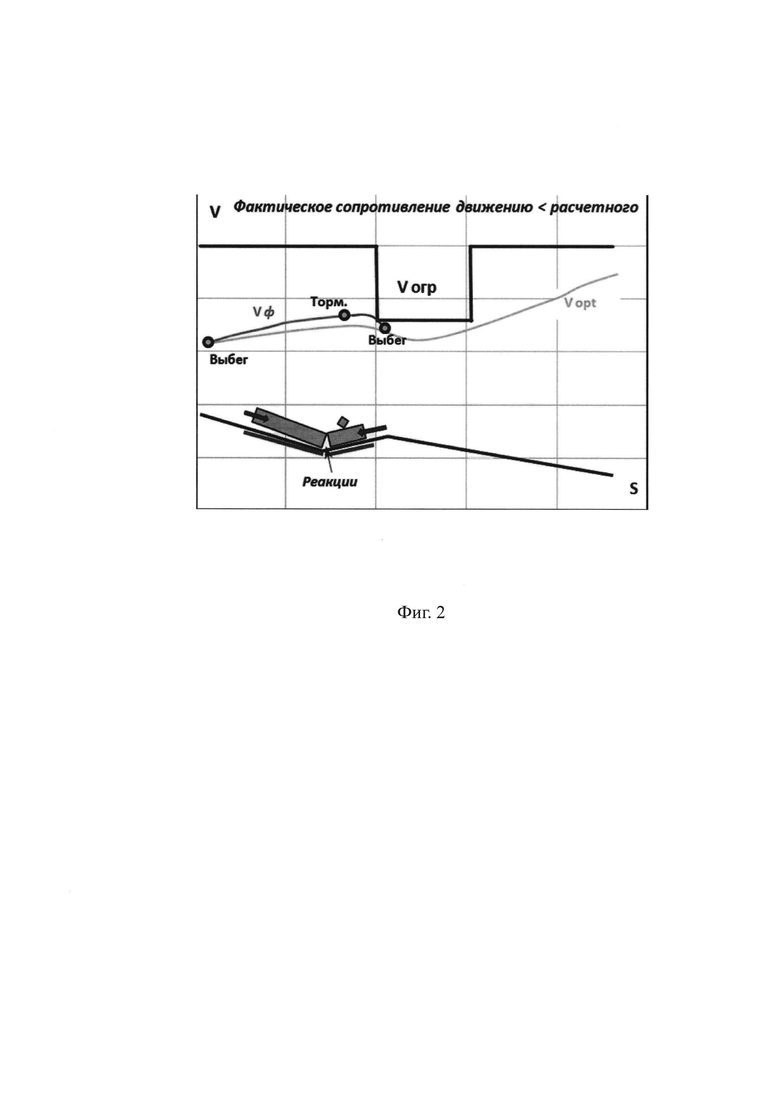
[00023] Фиг. 2 представляет собой пример движения по профилю пути с фактическим сопротивлением движению меньше расчетного;
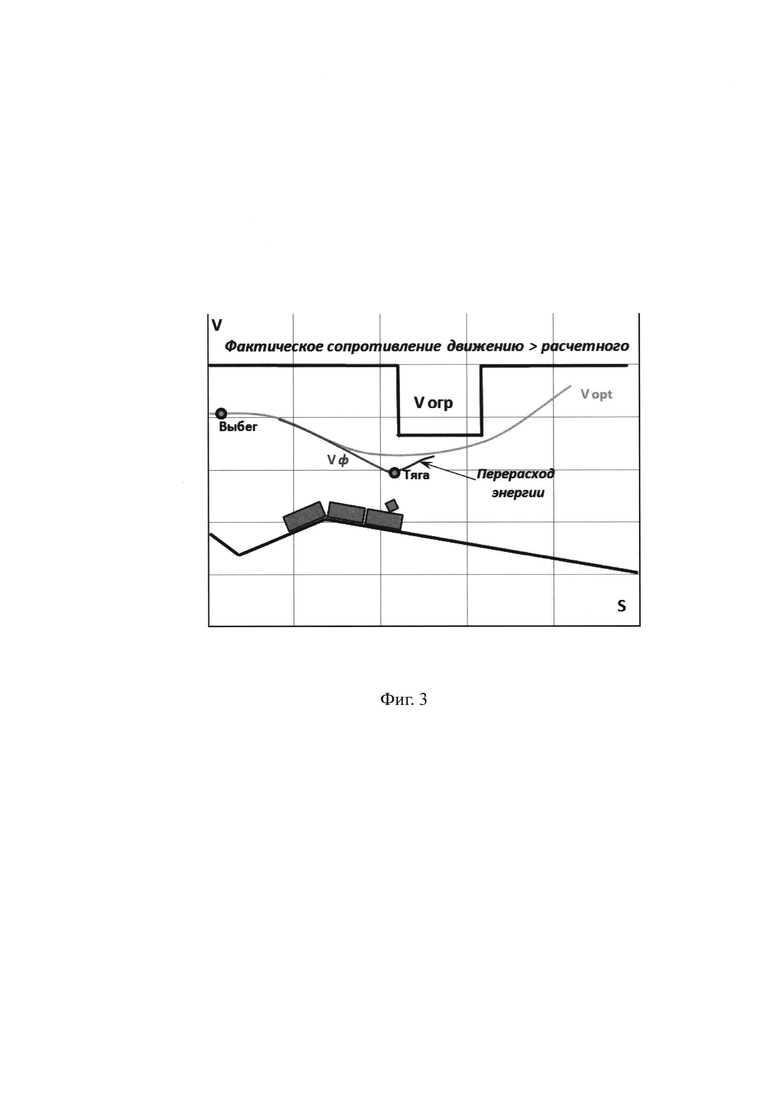
[00024] Фиг. 3 представляет собой пример движения по профилю пути с фактическим сопротивлением движению больше расчетного;
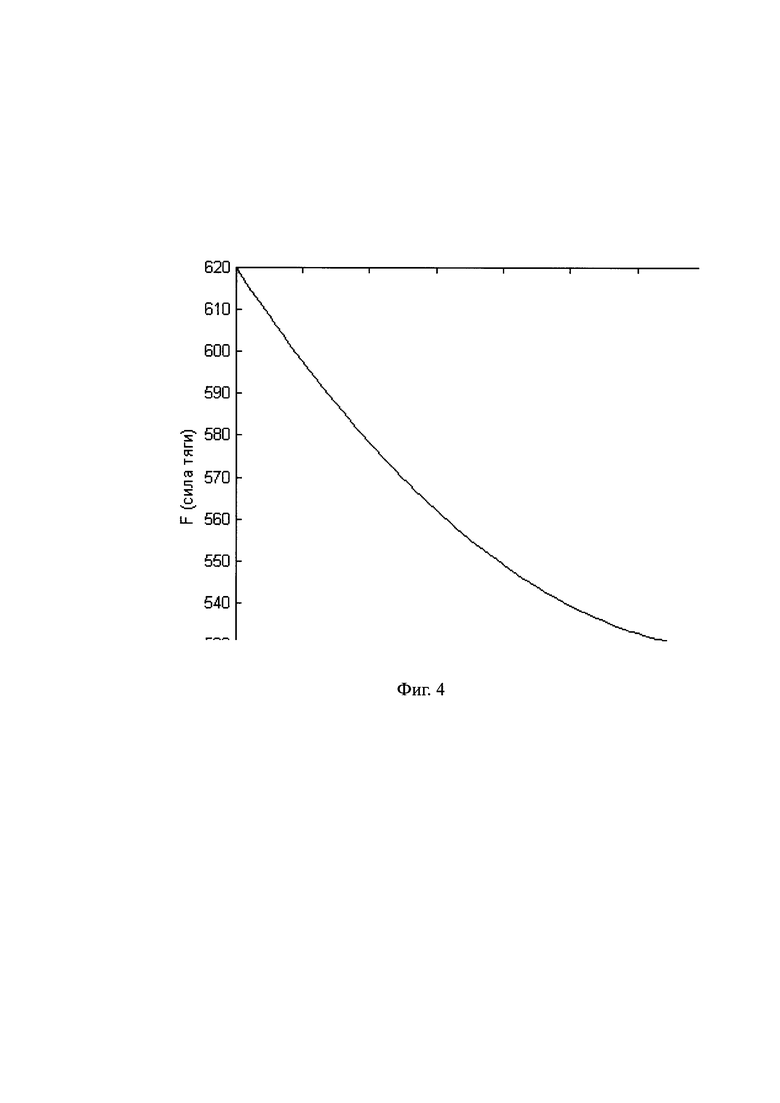
[00025] Фиг. 4 представляет собой график зависимости максимальной по
сцеплению силы тяги от скорости Fmax(p, ν) грузового электровоза;
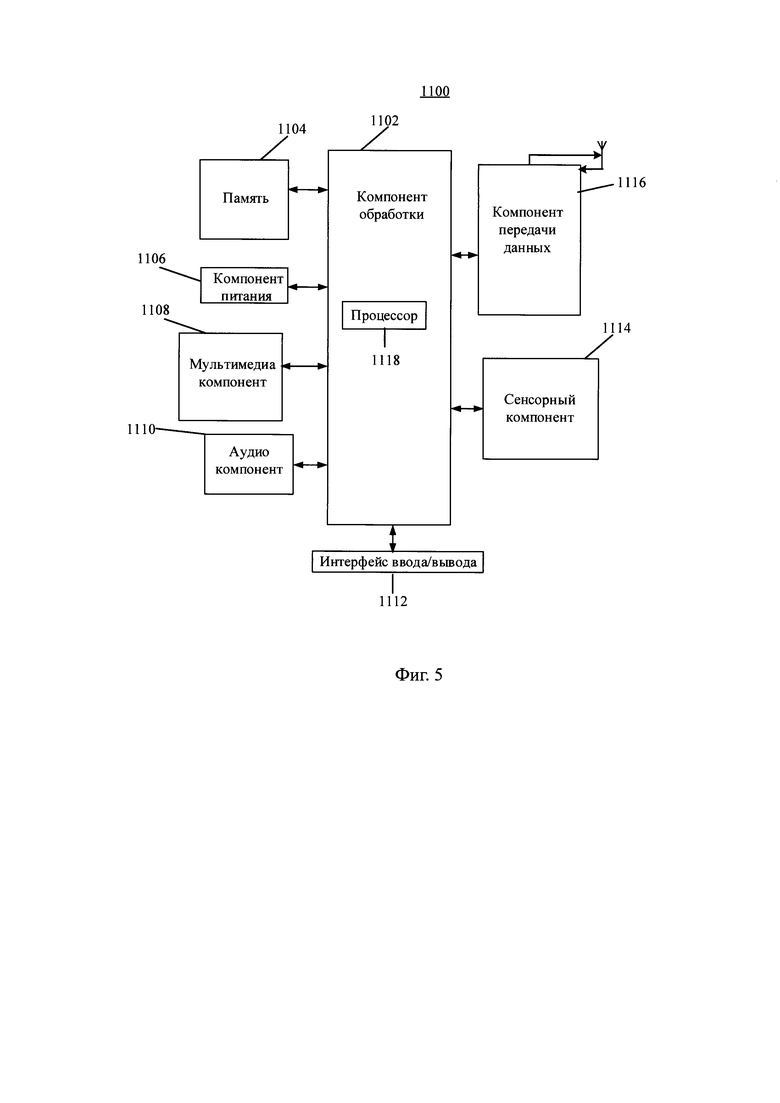
[00026] Фиг. 5 представляет собой пример осуществления устройства повышения эффективности движения железнодорожного транспорта на участке пути;
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[00027] Данное техническое решение может быть реализовано на компьютере, в виде системы или машиночитаемого носителя, содержащего инструкции для выполнения вышеупомянутого способа.
[00028] Техническое решение может быть реализовано в виде распределенной компьютерной системы.
[00029] В данном решении под системой подразумевается компьютерная система, ЭВМ (электронно-вычислительная машина), ЧПУ (числовое программное управление), ГОЖ (программируемый логический контроллер), компьютеризированные системы управления и любые другие устройства, способные выполнять заданную, четко определенную последовательность операций (действий, инструкций).
[00030] Под устройством обработки команд подразумевается электронный блок либо интегральная схема (микропроцессор), исполняющая машинные инструкции (программы).
[00031] Устройство обработки команд считывает и выполняет машинные инструкции (программы) с одного или более устройства хранения данных. В роли устройства хранения данных могут выступать, но, не ограничиваясь, жесткие диски (HDD), флеш-память, ПЗУ (постоянное запоминающее устройство), твердотельные накопители (SSD), оптические приводы.
[00032] Программа - последовательность инструкций, предназначенных для исполнения устройством управления вычислительной машины или устройством обработки команд.
[00033] Согласно заявляемому техническому решению, способ повышения эффективности движения железнодорожного транспорта на участке пути, который показан на Фиг. 1, реализован следующим образом:
[00034] Шаг 101: получают вектор параметров кривой буксования, коэффициент буксования, вектор параметров кривой скольжения, коэффициент скольжения, вектор параметров сопротивления движению, сопротивление движению, массу и точность выполнения расписания железнодорожного транспорта;
[00035] С каждого поезда получают, текущее расписание, а также текущее состояние дороги (пропускная способность, максимальная загруженность, составность).
[00036] С каждого поезда, в процессе поездки, получают вектор параметров кривой буксования, вектор параметров кривой скольжения, вектор параметров сопротивления движению, массу подвижного состава, точность выполнения графика движения. Сопротивление движению, кривая скольжения, кривая буксования являются зависимостью от скорости.
[00037] Шаг 102: уточняют параметры сцепления на основании данных, полученных на предыдущем шаге;
[00038] Под уточнением параметров сцепления здесь подразумевается уточнение кривой скольжения и кривой буксования:
[00039] Fslip(p, ν) - кривая буксования: зависимость максимальной по сцеплению силы тяги от скорости движения (р - вектор параметров кривой буксования).
[00040] Принимается, что кривая буксования точно описывает сцепление колеса с рельсом, если выполняются два условия:
[00041] 1) При заданной скорости движения фактическая сила тяги больше, чем значение кривой буксования и происходит буксование.
[00042] 2) При заданной скорости движения фактическая сила тяги меньше, чем значение кривой буксования и не происходит буксование.
[00043] Кривая скольжения:
[00044] Fslide(p, ν) - кривая скольжения: зависимость максимальной по сцеплению силы торможения от скорости движения - вектор параметров кривой скольжения).
[00045] Принимается, что кривая скольжения точно описывает сцепление колеса с рельсом, если выполняются два условия:
[00046] 1) При заданной скорости движения фактическая сила торможения больше, чем значение кривой скольжения и происходит скольжение.
[00047] 2) При заданной скорости движения фактическая сила торможения меньше, чем значение кривой скольжения и не происходит скольжения.
[00048] Сцепление колеса с рельсом (кривая скольжения и кривая буксования) зависит от типа локомотива и состояния пути. В данном техническом решении предлагается оперативное уточнение на борту локомотива параметров зависимости в кривых буксования и скольжения. Результат (уточненный вектор параметров зависимости) передается на сервер или в пункт управления движением. Т.е. для каждой серии локомотива и участка дороги становится возможно точно рассчитать максимальную силу тяги и торможения в зависимости от скорости движения.
[00049] Уравнение движения поезда:

[00050] где
γ - коэффициент, учитывающий инерцию вращающихся частей
ν - скорость состава в координате х
F(x) - значение управляющего воздействия в координате x
W(ν) - сопротивление движению при скорости движения ν
i(x) - добавочная сила, создаваемая профилем пути.
[00051] При известном коэффициенте сцепления можно для конкретной серии локомотива и участка пути определить максимальную силу тяги и торможения. В некоторых случаях, максимальную силу тяги и торможения определяют в каждой точке участка пути. Соответственно зная эти значения можно определить, возможно ли выполнить заданное расписание движения, с учетом продольного профиля пути и карты ограничений (ограничения скорости для каждой координаты пути). Продольный профиль пути - проекция трассы ж.д. на вертикальную плоскость. На существующих линиях продольный профиль пути определяется уровнем головки рельса. Продольный профиль пути состоит из горизонтальных участков (площадок) и уклонов. Площадки и уклоны различной крутизны называются элементами профиля. Если расписание выполнить невозможно, то необходимо менять либо массу состава, либо время движения. И наоборот: если при текущем значении коэффициента сцепления расписание не требует изменения, то можно также изменить массу или время, тем самым, увеличив пропускную способность дороги.
[00052] Шаг 103: определяют на заданном участке пути максимально-допустимый вес железнодорожного транспорта и минимально возможное время пути при максимально допустимом весе, на основе данных, полученных на предыдущем шаге;
[00053] На каждом подвижном составе уточняется коэффициент буксования: зависимость максимальной по сцеплению силы тяги от скорости Fmax(p, ν) (p - уточняемый вектор зависимости). При использовании скорости в данной зависимости, получается максимальная по сцеплению сила тяги. Данная зависимость может быть разной, для каждой серии железнодорожного транспорта. Например, для грузового электровоза, зависимость может быть следующей (Фиг. 4):
Fmax(p, ν)=600-2.4v+0.0158v2
[00054] Уравнение движения имеет следующий вид:

начальное условие:

W(p, ν) - зависимость сопротивления движению от скорости.
p - вектор параметров зависимости сопротивления движению.
[00055] Зная начальную скорость ν0 и максимально возможную силу тяги, можно рассчитать максимальную скорость движения в каждой координате или, соответственно, минимальное время движения на участке пути.
[00056] Если в задаче (1)-(2) в качестве функции F(x) подставить Fslip(pslip, ν) кривую буксования), то для каждого момента t>0 в качестве решения задачи (1)-(2) получается νmax(t).
[00057] Шаг 104: передают значения, полученные на предыдущем шаге, в пункт управления движением с железнодорожного транспорта.
[00058] Указанные значения передаются по беспроводному каналу передачи данных с железнодорожного транспорта в пункт управления движением, в котором корректируют расписание движения железнодорожного транспорта. В беспроводных каналах передача информации осуществляется на основе распространения радиоволн. В некоторых случаях, могут использоваться спутниковые каналы передачи данных
[00059] Шаг 105: корректируют в пункте управления движением расписание движения и составность железнодорожного транспорта, следующего за вышеуказанным.
Для конкретной серии локомотива, на основе полученной информации (вектора параметров зависимостей сопротивления движению, кривой буксования, кривой скольжения) при заданной массе и составности определяют минимальное время движения. Если при заданной массе и параметрах поезда невозможно выполнить расписание, то корректируют либо вес поезда, либо расписание. Более того, если возможно выполнить расписание при весе поезда, большем, чем заданный, то возможно увеличение массы поезда. Корректировка массы подвижного состава представляет собой команды, которые направляются непосредственно на железнодорожный узел, отвечающий за формирование железнодорожного состава.
[00060] Шаг 106: передают расписание движения и составность транспорта с вышеуказанного пункта управления движением, по крайней мере, одной железнодорожной станции и, по крайней мере, одному железнодорожному транспорту, следующему за вышеуказанным.
Параметры, определение на предыдущем шаге передают поездам данного типа, а также в систему составления управления движением.
[00061] Настоящее подробное описание составлено с приведением различных, не имеющих ограничительного и исчерпывающего характера вариантов осуществления. В то же время, специалистам, имеющим средний уровень компетентности в рассматриваемой области техники, очевидно, что различные замены, модификации или сочетания любых раскрытых здесь вариантов осуществления (в том числе частично) могут быть воспроизведены в пределах объема настоящего технического решения. Таким образом, подразумевается и понимается, что настоящее описание включает дополнительные варианты осуществления, суть которых не изложена здесь в явно выраженной форме. Такие варианты осуществления могут быть получены путем, например, сочетания, модификации или преобразования каких-либо действий, компонентов, элементов, свойств, аспектов, характеристик, ограничений и пр., относящихся к приведенным здесь и не имеющим ограничительного характера вариантам осуществления.
ПРИМЕРЫ РЕАЛИЗАЦИИ
Рассмотрим пример осуществления технического решения.
[00062] На железнодорожном транспорте А (например, электровоз серии 25Е0) получают вектор параметров сопротивления движению W(p, ν), кривой буксования Fslip(pslip, ν), кривой скольжения Fslide(pslide, ν) на участке пути x0, xk.
[00063] В некоторых вариантах реализации получают данные с поезда в каждой координате участка пути.
Уточняют параметры сопротивления движению, кривой буксования, кривой скольжения.
[00064] На основе параметров, полученных на предыдущем шаге, рассчитывается максимальная скорость на участке для поезда В типа А (например, электровоз типа 25Е0) с массой m.
[00065] На основе полученных значений νmax(t) и рассчитывают минимальное время движения по следующей формуле:
[00066] Если время по расписанию t удовлетворяет условию
t<tmax,
то ничего не предпринимают.
[00067] Иначе, либо меняется расписание (время t) движения поездов, либо масса состава (m).
Если t<tmin, то надо либо увеличить время по расписанию или уменьшить массу подвижного состава таким образом, что бы t≥tmin. Значение массы может быть получено из уравнения движения, при t = расписанию; и максимальной по сцеплению силы тяги.
Если t≥tmin (расписание можно выполнить с запасом), то возможно увеличить массу состава и/или уменьшить время по расписанию.
Далее, на основе полученной информации с поезда А, в пункте управления движением для участка пути x0, xk корректируются параметры (кривой буксования, скольжения, сопротивления движению);
[00068] Затем, скорректированная на пункте составления расписания информация, передается в поезд В, на котором, на основе этой информации решается задача оптимального управления:
 , где
, где
[00069] при фиксированной скорости v, необходимо, что бы выполнялось неравенство
Fslide(pslide, ν)<F<Fslip(pslip, ν)
где
F(x) - управляющее воздействие в координате х;
x0, xk - начальная и конечная координата маршрута.
[00070] Уравнение движения поезда имеет следующий вид:

[00071] Время движения рассчитывается по формуле:
[00072] Очевидно, что чем точнее известны векторы параметров зависимостей, тем точнее можно решить задачу оптимизации.
[00073] Технический результат заявленного технического решения достигается следующим образом. Если на большом подъеме масса поезда большая, а коэффициент сцепления не позволяет развивать большую тягу, то поезд может встать, что приведет к остановке движения на участке пути. Если известны точные значения вектора параметров сцепления, коэффициента сцепления, кривой скольжения, массы и точности выполнения расписания железнодорожного транспорта, то массу поезда при формировании надо уменьшить относительно первоначальной или поменять расписание движения железнодорожного транспорта, что повлечет за собой увеличение энергоэффективности и увеличение пропускной способности на железнодорожном транспорте.
[00074] Также если в уравнении движения (1) сопротивление движению W отличается от реального, то сила тяги F(x) не будет обеспечивать поддержание необходимой скорости, скорость движения железнодорожного транспорта будет падать, в результате чего будет падать пропускная способность.
[00075] Фиг. 5 представляет собой блок-диаграмму, показывающую устройство повышения эффективности движения железнодорожного транспорта на участке согласно еще одному примеру осуществления изобретения. Например, устройство 1100 может быть мобильным телефоном, персональным компьютером, планшетом.
[00076] Ссылаясь на Фигуру 5, устройство 1100 может включать один или более следующих компонент: компонент 1102 обработки, память 1104, компонент 1106 питания, компонент 1108 мультимедиа, компонент 1110 аудио, интерфейс 1112 ввода/вывода (I/О), сенсорный компонент 1114, компонент 1116 передачи данных.
[00077] Компонент 1102 обработки в основном управляет всеми операциями устройства 1100, например, дисплеем, телефонным звонком, передачей данных, работой камеры и операцией записи. Модуль 1102 обработки может включать в себя один или более процессоров 1118, реализующих инструкции для завершения всех или части шагов из указанного выше способа. Кроме того, модуль 1102 обработки может включать в себя один или более модулей для удобного процесса взаимодействия между модулями 1102 обработки и другими модулями. Например, модуль 1102 обработки может включать в себя мультимедийный модуль для удобного облегченного взаимодействия между компонентом 1108 мультимедиа и компонентом 1102 обработки.
[00078] В некоторых вариантах реализации, процессор 1118 выполняет следующие шаги:
[00079] получает вектор параметров сцепления, вектор параметров коэффициента сцепления, вектор параметров кривой скольжения, вектор параметров сопротивления движению, массу и точность выполнения расписания железнодорожного транспорта либо из памяти 1104, либо из интерфейса 1112 ввода/вывода (I/О);
[00080] уточняет параметры сцепления одного железнодорожного транспорта на основании данных, полученных на предыдущем шаге;
[00081] определяет на заданном участке пути максимально-допустимый вес железнодорожного транспорта и минимально-возможное время пути при максимально-допустимом весе, на основе данных, полученных на предыдущем шаге;
[00082] передает значения, полученные на предыдущем шаге, с помощью компонента 1116 передачи данных, в пункт управления движением с железнодорожного транспорта;
[00083] корректирует в пункте управления движением расписание движения и составность железнодорожного транспорта, следующего за вышеуказанным;
[00084] передает расписание движения и составность транспорта с пункта управления движением посредством компонента 1116 передачи данных, по крайней мере, одной железнодорожной станции и, по крайней мере, одному железнодорожному транспорту, следующему за вышеуказанным.
[00085] Память 1104 выполнена с возможностью хранения различных типов данных для поддержки работы устройства 1100. Примеры таких данных включают в себя инструкции из любого приложения или способа, контактные данные, изображения, видео, и т.д., и все они работают на устройстве 1100. Также память 1104 может содержать вектор параметров сцепления, вектор параметров коэффициента сцепления, вектор параметров кривой скольжения, вектор параметров сопротивления движению, массу и точность выполнения расписания железнодорожного транспорта. Память 1104 может быть реализована в виде любого типа энергозависимого запоминающего устройства, энергонезависимого запоминающего устройства или их комбинации, например, статического оперативного запоминающего устройства (СОЗУ), Электрически Стираемого Программируемого Постоянного Запоминающего Устройства (ЭСППЗУ), Стираемого Программируемого постоянного запоминающего устройства (СНИЗУ), Программируемого постоянного запоминающего устройства (ППЗУ), постоянного запоминающего устройства (ПЗУ), магнитной памяти, флэш-памяти, магнитного диска или оптического диска.
[00086] Компонент 1106 питания обеспечивает электричеством различные компоненты устройства 1100. Компонент 1106 питания может включать систему управления электропитанием, один или более источник питания, и другие узлы для генерации, управления и распределения электроэнергии к устройству 1100.
[00087] Мультимедийный компонент 1108 включает в себя экран, обеспечивающий выходной интерфейс между устройством 1100 и пользователем, в качестве которого, в некоторых вариантах реализации выступает машинист железнодорожного транспорта. В некоторых вариантах осуществления, экран может быть жидкокристаллическим дисплеем (ЖКД) или сенсорной панелью (СП). Если экран включает в себя сенсорную панель, экран может быть реализован в виде сенсорного экрана для приема входного сигнала от машиниста. Таким образом, на мультимедийный компонент 1108 может быть введена как основная информация, необходимая для осуществления заявляемого технического решения, например, вектор параметров сцепления, вектор параметров коэффициента сцепления, вектор параметров кривой скольжения, вектор параметров сопротивления движению, массу и точность выполнения расписания железнодорожного транспорта, так и дополнительная информация, необходимая для осуществления других вариантов. Сенсорная панель включает один или более сенсорных датчиков в смысле жестов, прикосновения и скольжения сенсорной панели. Сенсорный датчик может не только чувствовать границу прикосновение или жест перелистывания, но и определять длительность времени и давления, связанных с режимом работы на прикосновении и скольжении. В некоторых вариантах осуществления узел 1108 мультимедиа включает одну фронтальную камеру и/или одну заднюю камеру. Когда устройство 1100 находится в режиме работы, например, режиме съемки или режиме видео, фронтальная камера и/или задняя камера могут получать мультимедиа данные извне. Каждая фронтальная камера и задняя камера может быть одной фиксированной оптической системой объектива или может иметь фокусное расстояние или оптический зум.
[00088] Аудио компонент 1110 выполнен с возможностью выходного и/или входного аудио сигнала. Например, аудио компонент 1110 включает один микрофон (MIC), который выполнен с возможностью получать внешний аудио сигнал, когда устройство 1100 находится в режиме работы, например, режиме вызова, режима записи и режима распознавания речи. Полученный аудио сигнал может быть далее сохранен в памяти 1104 или направлен по компоненту 1116 передачи данных. В некоторых вариантах осуществления аудио компонент 1110 также включает в себя один динамик, выполненный с возможностью вывода аудио сигнала. В некоторых вариантах реализации, машинист получает информацию о корректировании расписания движения из пункта управления движением с помощью аудио компонента 1110.
[00089] Интерфейс 1112 ввода/вывода обеспечивает интерфейс между компонентом 1102 обработки и периферийным интерфейсным модулем. Вышеуказанным периферийным интерфейсным модулем может быть клавиатура, кнопки, и т.д. Кнопка может включать, но не ограничиваясь, кнопку регулировки громкости, начальную кнопку и кнопку блокировки.
[00090] Сенсорный компонент 1114 содержит один или более сенсоров и выполнен с возможностью обеспечения различных аспектов оценки состояния устройства 1100. Например, сенсорный компонент 1114 может обнаружить состояния вкл/выкл устройства 1100, относительное расположение компонентов, например, дисплея и кнопочной панели прибора 1100, изменение положения устройства 1100 или одного компонента устройства 1100, наличие или отсутствие контакта между пользователем и устройством 1100, а также ориентацию или ускорение/замедление и изменение температуры устройства 1100. Сенсорный компонент 1114 содержит бесконтактный датчик, выполненный с возможностью обнаружения присутствия объекта, находящегося поблизости, когда нет физического контакта. Сенсорный компонент 1114 содержит оптический датчик (например, КМОП или ПЗС-датчик изображения) выполненный с возможностью использования в визуализации приложения. В некоторых вариантах сенсорный компонент 1114 содержит датчик ускорения, датчик гироскопа, магнитный датчик, датчик давления или датчик температуры.
[00091] Компонент 1116 передачи данных выполнен с возможностью облегчения проводной или беспроводной связи между устройством 1100 и другими устройствами, например, пунктом управления движением. Устройство 1100 может получить доступ к беспроводной сети на основе стандарта связи, таких как WiFi, 2G или 3G, или их комбинации. В одном примерном варианте компонент 1116 передачи данных получает широковещательный сигнал или трансляцию, связанную с ними информацию из внешней широковещательной системы управления через широковещательный канал. В одном варианте осуществления компонент 1116 передачи данных содержит модуль коммуникации ближнего поля (NFC), чтобы облегчить ближнюю связь. Например, модуль NFC может быть основан на технологии радиочастотной идентификации (RFID), технологии ассоциации передачи данных в инфракрасном диапазоне (IrDA), сверхширокополосной (UWB) технологии, Bluetooth (ВТ) технологии и других технологиях.
[00092] В примерном варианте осуществления устройство 1100 может быть реализовано посредством одной или более Специализированных Интегральных Схем (СИС), Цифрового Сигнального Процессора (ЦСП), Устройств Цифровой Обработки Сигнала (УЦОС), Программируемым Логическим Устройством (ПЛУ), логической микросхемой, программируемой в условиях эксплуатации (ППВМ), контроллера, микроконтроллера, микропроцессора или других электронных компонентов, и может быть сконфигурировано для реализации способа повышения эффективности движения железнодорожного транспорта на участке пути.
[00093] В примерном варианте осуществления, энергонезависимый компьютерно-читаемый носитель, содержит инструкции для выполнения способа, например, память 1104 включает инструкции, где инструкции выполняются процессором 1118 устройства 1100 для реализации описанных выше способов повышения эффективности движения железнодорожного транспорта на участке пути. Например, энергонезависимым компьютерно-читаемым носителем может быть ПЗУ, оперативное запоминающее устройство (ОЗУ), компакт-диск, магнитная лента, дискеты, оптические устройства хранения данных и тому подобное.
[00094] Специалист в данной области техники может легко осуществить другие варианты изобретения из рассмотренного описания, раскрытого здесь. Эта заявка предназначена для того, чтобы покрыть любые варианты изобретения, и включая такие отклонения от настоящего изобретения, которые появляются в пределах известной или обычной практики в уровне техники. Предполагается, что описание и примеры рассматриваются только как примерные, с сущностью и объемом настоящего изобретения, обозначенные формулой технического решения.
[00095] Следует принимать во внимание, что настоящее раскрытие не ограничивается точными конструкциями, которые были описаны выше и проиллюстрированы на прилагаемых чертежах, и что различные модификации и изменения могут быть сделаны без отхода от области его применения. Предполагается, что объем технического решения ограничен только прилагаемой формулой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫБОРА НАИБОЛЕЕ ЭКОНОМИЧНОГО РЕЖИМА ДВИЖЕНИЯ ПОЕЗДА НА ЗАДАННОМ УЧАСТКЕ ПУТИ | 2003 |
|
RU2237589C1 |
| СПОСОБ УПРАВЛЕНИЯ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ, КОНТРОЛЛЕР И ЖЕЛЕЗНОДОРОЖНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2020 |
|
RU2804825C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ ПАРАМЕТРОВ МНОЖЕСТВА ЖЕЛЕЗНОДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ, ДЕЙСТВУЮЩИХ В ЖЕЛЕЗНОДОРОЖНЫХ СЕТЯХ С МНОЖЕСТВОМ ПЕРЕСЕЧЕНИЙ | 2007 |
|
RU2466049C2 |
| Способ адаптивного управления автоматической подачей песка под колеса локомотива | 2022 |
|
RU2780751C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ РАБОТЫ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2359857C2 |
| СПОСОБ ОПТИМИЗАЦИИ ДВИЖЕНИЯ ПОЕЗДОВ НА ОДНОПУТНОЙ ЖЕЛЕЗНОЙ ДОРОГЕ | 2008 |
|
RU2395423C1 |
| СПОСОБ УПРАВЛЕНИЯ И ВОЗМОЖНОГО ВОССТАНОВЛЕНИЯ СЦЕПЛЕНИЯ КОЛЕС УПРАВЛЯЕМОЙ ОСИ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2735967C2 |
| СПОСОБ И СИСТЕМА ПОВЫШЕНИЯ КПД ПОДВИЖНОГО СОСТАВА | 2014 |
|
RU2612459C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭНЕРГЕТИЧЕСКИХ ПОКАЗАТЕЛЕЙ ДВИЖЕНИЯ ПОЕЗДА И СИСТЕМЫ ТЯГОВОГО ЭЛЕКТРОСНАБЖЕНИЯ | 2016 |
|
RU2641537C2 |
| СПОСОБ И СИСТЕМА ФОРМИРОВАНИЯ МАРШРУТА ПЕРЕДВИЖЕНИЯ ОТ ДВЕРИ ДО ДВЕРИ | 2023 |
|
RU2807495C1 |
Техническое решение относится к области автоматики и телемеханики на железнодорожном транспорте. Устройство, реализующее способ повышения эффективности движения железнодорожного транспорта на участке пути, включает: процессор; память для хранения команд, исполняемых процессором. При этом процессор выполнен с возможностью: получения вектора параметров кривой буксования, вектора параметров кривой скольжения, вектора параметров сопротивления движению, массы и точности выполнения расписания железнодорожного транспорта; уточнения параметров сцепления; определения на заданном участке пути максимально допустимого веса железнодорожного транспорта и минимально возможного времени пути при максимально допустимом весе; передачи этих значений в пункт управления движением с железнодорожного транспорта; корректировки в пункте управления движением расписания движения и составности железнодорожного транспорта, следующего за вышеуказанным; передачи расписания движения и составности транспорта с пункта управления движением железнодорожной станции и железнодорожному транспорту, следующему за вышеуказанным. Достигается повышение энергоэффективности движения железнодорожного транспорта. 2 н. и 10 з.п. ф-лы, 5 ил.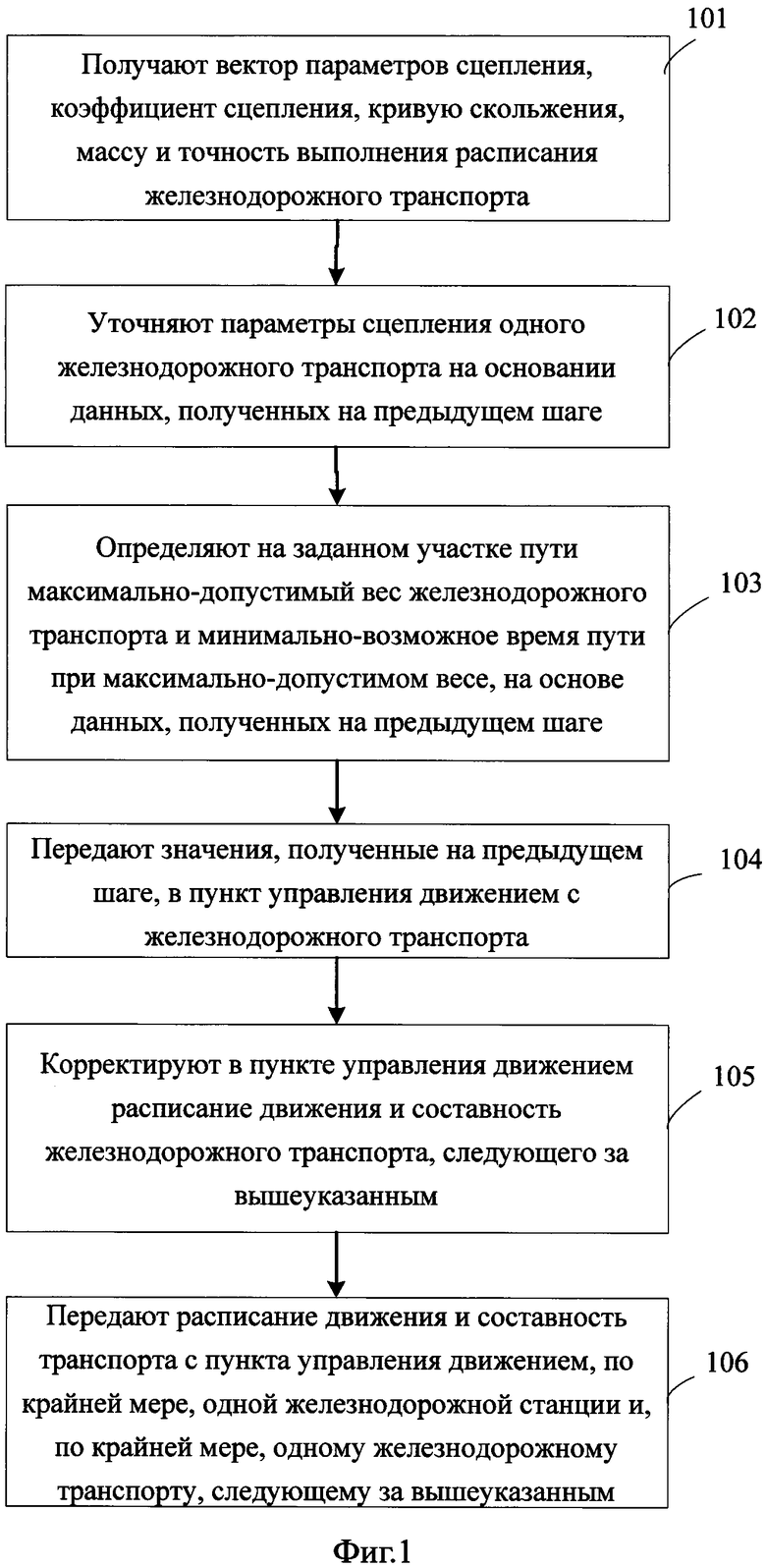
1. Способ повышения эффективности движения железнодорожного транспорта на участке пути, в котором:
- получают вектор параметров кривой буксования, вектор параметров кривой скольжения, вектор параметров сопротивления движению, массу и точность выполнения расписания железнодорожного транспорта;
- уточняют параметры сцепления на основании данных, полученных на предыдущем шаге;
- определяют на заданном участке пути максимально допустимый вес железнодорожного транспорта и минимально возможное время пути при максимально допустимом весе на основе данных, полученных на предыдущем шаге;
- передают значения, полученные на предыдущем шаге, в пункт управления движением с железнодорожного транспорта;
- корректируют в пункте управления движением расписание движения и составность железнодорожного транспорта, следующего за вышеуказанным;
- передают расписание движения и составность транспорта с пункта управления движением по крайней мере одной железнодорожной станции и по крайней мере одному железнодорожному транспорту, следующему за вышеуказанным.
2. Способ по п. 1, характеризующийся тем, что уточняют параметры сцепления в каждой координате пути.
3. Способ по п. 1, характеризующийся тем, что уточняют параметры сцепления на заданных участках пути.
4. Способ по п. 1, характеризующийся тем, что при уточнении параметров сцепления, параметрами сцепления являются зависимости кривой буксования или кривой скольжения от скорости поезда.
5. Способ по п. 1, характеризующийся тем, что после вычисления минимального времени движения на участке пути, максимальной скорости движения полученные значения передают в систему составления расписания.
6. Способ по п. 1, характеризующийся тем, что после получения минимального времени движения на участке пути, максимальной скорости движения корректируют расписание и составность поездов.
7. Способ по п. 1, характеризующийся тем, что после вычисления минимального времени движения на участке пути, максимальной и минимальной скоростей движения полученные значения передаются впередиидущим поездам и используются для расчета энергооптимального режима управления.
8. Способ по п. 1, характеризующийся тем, что вычисляют минимальное время движения, максимальную скорость движения на участке пути.
9. Способ по п. 1, характеризующийся тем, что вычисляют минимальное время движения, максимальную скорость движения в каждой координате пути.
10. Способ по п. 1, характеризующийся тем, что уточненные параметры передаются другим поездам и используются для энергоэффективного управления.
11. Способ по п. 1, характеризующийся тем, что уточненные параметры передаются в систему составления расписания и используются для корректировки расписания и составности (массы и количества вагонов) других поездов.
12. Устройство повышения эффективности движения железнодорожного транспорта на участке пути, содержащее:
 процессор;
процессор;
 память для хранения команд, исполняемых процессором;
память для хранения команд, исполняемых процессором;
 при этом процессор выполнен с возможностью: получения вектора параметров кривой буксования, вектора параметров кривой скольжения, вектора параметров сопротивления движению, массы и точности выполнения расписания железнодорожного транспорта;
при этом процессор выполнен с возможностью: получения вектора параметров кривой буксования, вектора параметров кривой скольжения, вектора параметров сопротивления движению, массы и точности выполнения расписания железнодорожного транспорта;
 уточнения параметров сцепления на основании данных, полученных на предыдущем шаге;
уточнения параметров сцепления на основании данных, полученных на предыдущем шаге;
 определения на заданном участке пути максимально допустимого веса железнодорожного транспорта и минимально возможного времени пути при максимально допустимом весе на основе данных, полученных на предыдущем шаге;
определения на заданном участке пути максимально допустимого веса железнодорожного транспорта и минимально возможного времени пути при максимально допустимом весе на основе данных, полученных на предыдущем шаге;
 передачи значений, полученных на предыдущем шаге, в пункт управления движением с железнодорожного транспорта;
передачи значений, полученных на предыдущем шаге, в пункт управления движением с железнодорожного транспорта;
 корректировки в пункте управления движением расписания движения и составности железнодорожного транспорта, следующего за вышеуказанным;
корректировки в пункте управления движением расписания движения и составности железнодорожного транспорта, следующего за вышеуказанным;
 передачи расписания движения и составности транспорта с пункта управления движением по крайней мере одной железнодорожной станции и по крайней мере одному железнодорожному транспорту, следующему за вышеуказанным.
передачи расписания движения и составности транспорта с пункта управления движением по крайней мере одной железнодорожной станции и по крайней мере одному железнодорожному транспорту, следующему за вышеуказанным.
| EA 201400791 A1, 29.01.2016 | |||
| EA 201400784 A1, 29.02.2016 | |||
| СПОСОБ И СИСТЕМА ДЛЯ УСОВЕРШЕНСТВОВАНИЯ ТЕХНИКИ ВОЖДЕНИЯ ПОЕЗДОВ И СНИЖЕНИЯ РАСХОДА ТОПЛИВА | 2006 |
|
RU2409484C2 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Способ определения массы движущегося поезда и устройство для его осуществления | 1990 |
|
SU1798233A1 |

