Изобретение относится к области радиотехники и может быть использовано в разностно-дальномерных системах определения координат источников радиоизлучений (ИРИ), использующих в качестве координатно-информативного параметра взаимную задержку принятых радиосигналов.
Известны:
1. Способ измерения взаимной задержки сигналов с программной перестройкой рабочей частоты (ППРЧ) [1].
2. Разностно-дальномерный способ определения координат источника радиоизлучения [2].
3. Разностно-дальномерные многопозиционные радиотехнические системы [3, с. 228…241].
4. Оценка разности моментов прихода сигналов группировкой пространственно-разнесенных малых космических аппаратов [4].
5. Определение времени задержки приема сигнала пространственно-разнесенными сверхмалыми космическими аппаратами [5].
6. Определение местоположения источника шумоподобного сигнала с использованием корреляционной функции [7].
Основным недостатком вышеперечисленных способов является то, что они требуют ретрансляции сигналов, принятых на периферийных пунктах приема (ППП), на центральный пункт приема и обработки (ЦППО), где производится их совместная взаимно корреляционная обработка. При этом взаимная задержка сигналов (ВЗС) соответствует положению максимума модуля взаимно корреляционной функции этих сигналов. Ретрансляция может осуществляться как в аналоговом, так и в цифровом виде. При этом для цифровой ретрансляции необходимо наличие шкалы единого времени на всех пунктах приема [7]. Необходимость ретрансляции сигналов с периферийных пунктов на центральный требует наличия высокоскоростных каналов передачи данных. А именно их отсутствие и является основным сдерживающим фактором широкого применения разностно-дальномерных систем местоопределения (РДС МО) на практике, так как при таком способе реализации РДС МО их пропускная способность очень низка.
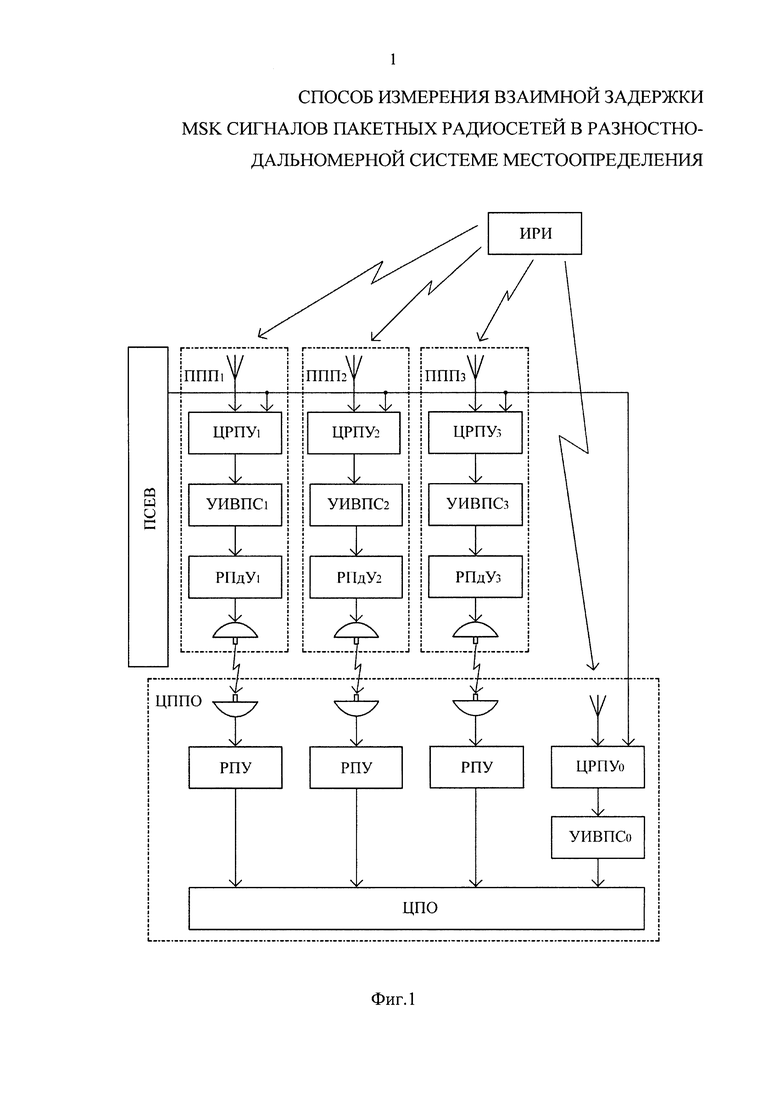
Наиболее близким к заявляемому способу по совокупности совпадающих существенных признаков является способ [6, 7], который выбран в качестве прототипа. Суть данного способа заключается в измерении взаимной задержки сигналов неизвестной формы, основанном на измерении времени прихода сигналов (ВПС) [8] в каждом ППП РДС МО, оснащенной подсистемой единого времени (ПСЕВ), и передачей на ЦППО только результатов измерения. Данный способ применим к импульсным сигналам, к которым относятся и сигналы пакетных радиосетей (в том числе с ППРЧ). Такой подход резко увеличивает пропускную способность РДС МО. Но так как форма сигнала неизвестна, то задача измерения временного положения сигнала сводится к измерению временного положения огибающей импульсного сигнала (пакета). Измеренные значения ВПС передаются на ЦППО, где производится вычисление разностей времени приема этих сигналов в ППП и ЦППО как разностей, соответствующих ВПС, после чего вычисляются координаты ИРИ. Структурная схема РДС МО, содержащей три ПРПП, один ЦППО и ПСЕВ, приведена на фиг. 1.
Каждый периферийный пункт приема сигнала ИРИ (ПППi), представляющий совокупность устройств, выделяющих радиосигналы от ИРИ на фоне помех, устройств, измеряющих ВПСi относительно шкалы единого времени, а также устройств, организующих линии передачи измеренных ВПСi, включает в себя:
- антенное и цифровое радиоприемное (ЦРПУi) устройства для приема сигналов ИРИ;
- устройство измерения времени прихода сигнала (УИВПСi) для выделения огибающей пакета и измерения его временного положения по шкале единого времени (ВПСi);
- радиопередающее (РПдУi) и антенное устройства для передачи измеренных значений ВПСi на ЦППО, где i=1, 2, 3.
Центральный пункт приема и обработки, представляющий совокупность устройств, выделяющих радиосигналы от ИРИ на фоне помех, устройства, измеряющего ВПС0 относительно шкалы единого времени, а также устройств, предназначенных для выделения полезной информации о параметрах ИРИ (взаимной задержки сигналов) путем вычисления разностей BПCi в ПППi и ЦППО, включает в себя:
- антенные и радиоприемные устройства (РПрУ) для приема информационных сигналов о ВПСi;
- антенное и радиоприемное (РПрУ0) устройства для приема сигналов ИРИ;
- центральный пункт обработки (ЦПО).
В ЦПО производится оценка величины взаимных задержек сигналов ИРИ в приемных пунктах путем вычисления разностей ВПСi в ПППi и ЦППО.
Подсистема единого времени представляет собой совокупность устройств, служащих для формирования шкалы единого времени на всех пунктах приема.
Вычисление ВПСi в ПППi производится в УИВПСi следующим образом.
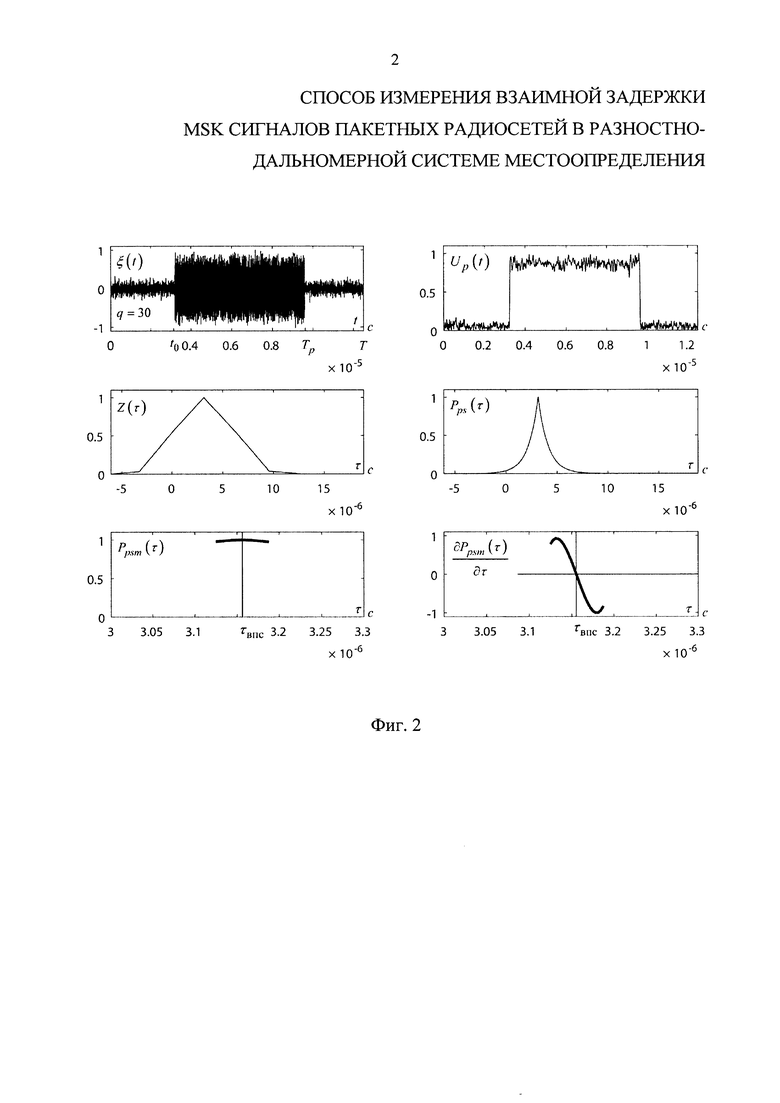
Сначала выделяется огибающая пакета Up(t). Для этого входной действительный сигнал ξ(t,λ)=s(t,λ)+n(t), 0≤t≤T, представляющий собой сумму полезного сигнала s(t,λ), зависящего от нескольких параметров λ={λ1,λ2,…,λn} и шума n(t), где Т - время наблюдения, преобразуется в аналитический с помощью преобразования Гильберта [9, с. 469-473].

где  - преобразование Гильберта ξ(t); Т - длительность наблюдения.
- преобразование Гильберта ξ(t); Т - длительность наблюдения.
Огибающая пакета Up(t) определяется как модуль аналитического сигнала

Затем решается задача определения временного положения огибающей пакета [8, с. 189-200]. В соответствии с теорией оптимального приема задачей идеального приемника, предназначенного для измерения временного положения сигнальных импульсов, является выработка апостериорной плотности вероятности (АПВ) Pps (τ) параметра τ на основе анализа принятой реализации ξ(t) с учетом априорных сведений о сигнале и шуме

где Ppr (τ) - априорная плотность вероятности;
k - коэффициент, выбираемый из условия нормировки;

- функция правдоподобия;
- I0(⋅) - модифицированная функция Бесселя нулевого порядка;

- функция взаимной корреляции между огибающей пакета Up (t) и видеоимпульсом U0 (t) длительностью Тр;
Nш - спектральная плотность мощности собственных шумов приемника.
При оценке ВПС - τвпс достаточно использовать центральный пик АПВ, аппроксимировав его каким-либо образом, например полиномом.
Тогда оценка времени прихода сигнала будет находиться из уравнения

где Ppsm - аппроксимация центрального пика апостериорной плотности вероятности.
А искомая ВЗС  вычисляется по формуле
вычисляется по формуле

где -  и
и  - оценки ВПС в i-м и j-м ППП соответственно, i≠j.
- оценки ВПС в i-м и j-м ППП соответственно, i≠j.
Если априорная плотность вероятности неизвестна, то оценка по максимуму апостериорной плотности вероятности совпадает с максимально правдоподобной оценкой.
Осциллограммы сигналов в характерных точках УИВПС приведены на фиг. 2.
Главным недостатком прототипа является низкая точность измерения ВПС, так как измерение производится по огибающей пакета и не используется внутриимпульсная модуляция пакета.
Цель изобретения - повышение точности измерения взаимной задержки MSK (minimum shift keying) сигналов пакетных радиосетей при неизвестном законе первичной модуляции в РДС МО.
Указанный технический результат при осуществлении предлагаемого способа достигается тем, что в предлагаемом способе изменяются действия при измерении ВПС в ППП.
Суть этих изменений заключается в следующем.
Основываясь на том, что прирост фазы на элементарном импульсе модулирующей последовательности MSK сигнала составляет  [10, стр. 177-181], ВПС в ППП измеряется по временному положению максимума апостериорной плотности вероятности, построенной через модуль результирующей взаимно корреляционной функции (ВКФ), вычисляемой с помощью парциальных ВКФ принимаемого в точке приема сигнала с четырьмя гармоническими колебаниями двух частот
[10, стр. 177-181], ВПС в ППП измеряется по временному положению максимума апостериорной плотности вероятности, построенной через модуль результирующей взаимно корреляционной функции (ВКФ), вычисляемой с помощью парциальных ВКФ принимаемого в точке приема сигнала с четырьмя гармоническими колебаниями двух частот  и
и  длительностью, равной длительности принимаемого сигнала (пакета) Тр. Здесь ƒн - частота несущей, Тс - длительность элементарного импульса модулирующей последовательности.
длительностью, равной длительности принимаемого сигнала (пакета) Тр. Здесь ƒн - частота несущей, Тс - длительность элементарного импульса модулирующей последовательности.
Тогда алгоритм построения АПВ Pps(τ) в предлагаемом способе будет описываться выражениями
где A1(τ), A0(τ), B1(τ), B0(τ) - парциальные ВКФ принимаемого в точке приема сигнала с четырьмя гармоническими колебаниями двух частот;
Т - время наблюдения;
D(⋅) - оператор выпрямления корреляционного интеграла;
Ppr(τ) - априорная плотность вероятности τ;
I0(⋅) - модифицированная функция Бесселя нулевого порядка;
L(τ) - функция правдоподобия;
Z(τ) - результирующая взаимно корреляционная функция;
Um - амплитуда сигнала;
Nш - спектральная плотность мощности собственных шумов приемника;
k - коэффициент, выбираемый из условия нормировки;
Ppr(τ) - априорная плотность вероятности.
Основной операцией при построении парциальных ВКФ является операция вычисления корреляционного интеграла (КИ), из конечных значений которых при различных τ и состоит парциальная ВКФ. Вычисление КИ в алгоритме, реализующем предлагаемый способ, имеет некоторые особенности. Рассмотрим их более подробно.
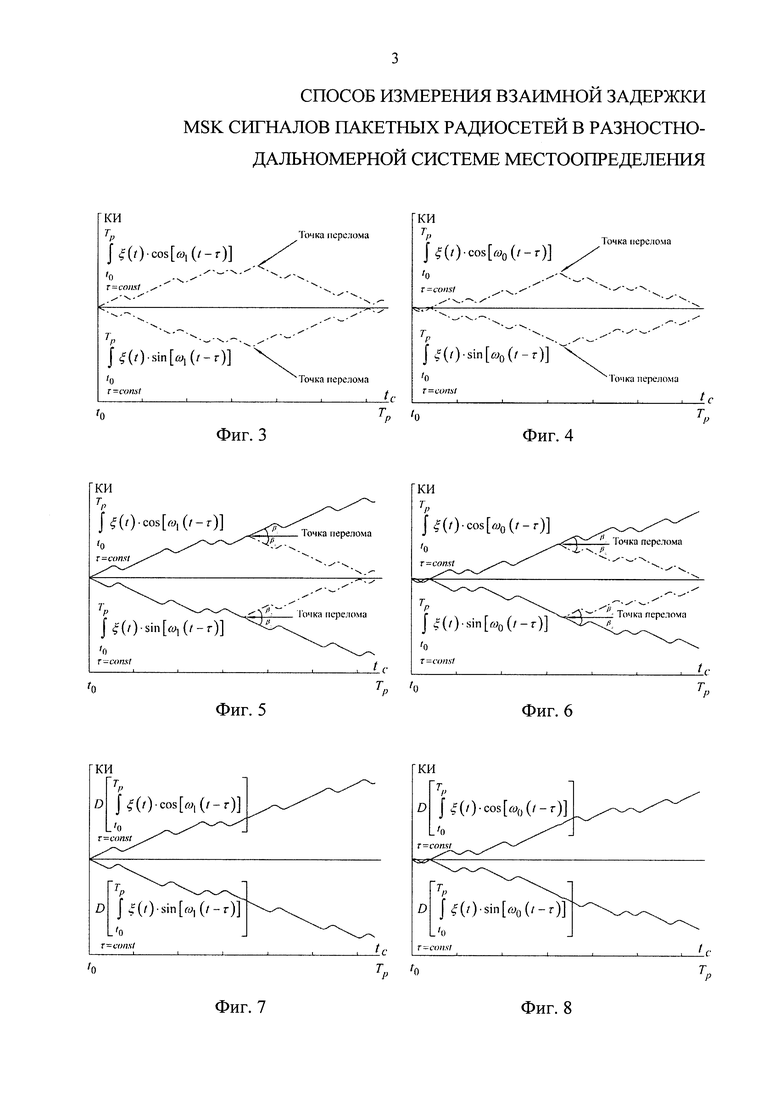
Так при вычислении корреляционных интегралов в выражениях (8, 9) возможны 2 случая: 1 - когда между импульсами одной частоты стоит четное число импульсов другой частоты, и 2 - когда число импульсов нечетное. В первом случае вычисление корреляционного интеграла (КИ) будет происходить нормально. Во втором случае при вычислении корреляционного интеграла происходит "перелом" (фиг. 3 и фиг. 4), при этом угол, под которым шло нарастание КИ, по величине остается таким же. Меняется только направление. Таким образом, в процессе вычисления КИ в каждом канале необходим его анализ с целью поиска "переломов" и изменения угла наклона зеркально относительно горизонтальной линии, проходящей через точку "перелома" (фиг. 5 и фиг. 6). Это возможно благодаря тому, что априорно известен вид корреляционного интеграла (он всегда возрастает по абсолютной величине). Оператор выпрямления КИ в (10) и (11) обозначен как D(⋅). Окончательный вид выпрямленных КИ приведен на фиг. 7 и фиг. 8.
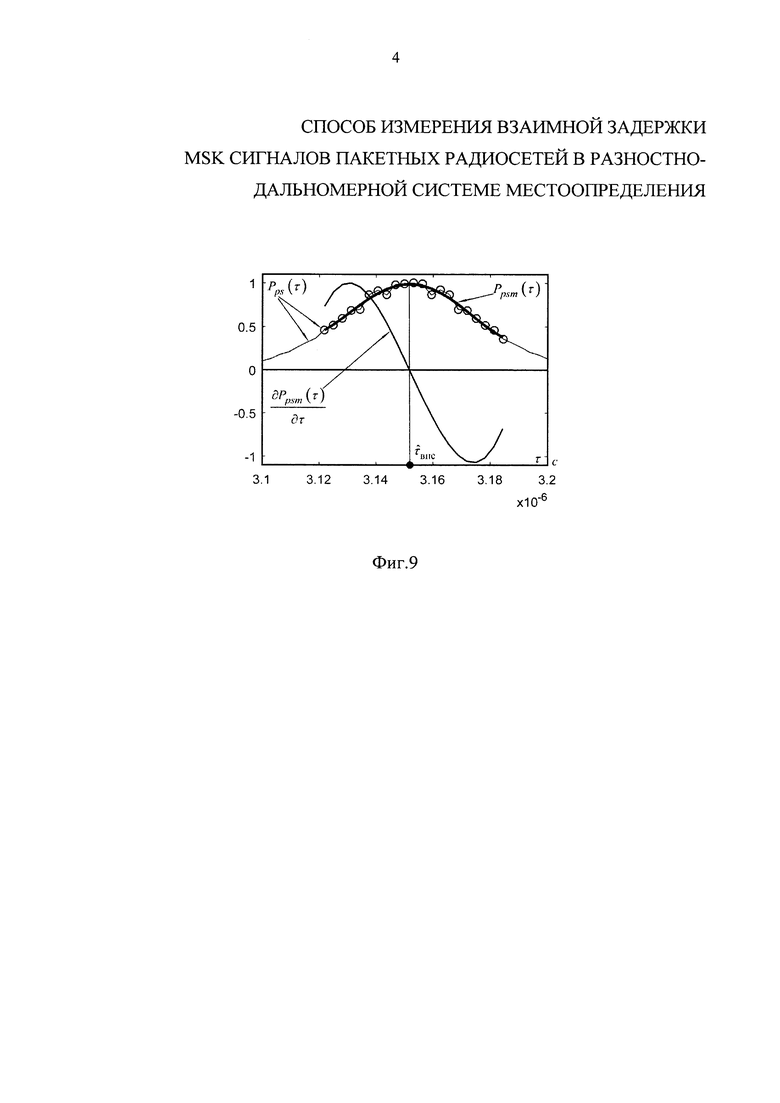
При оценивании ВПС, как и в прототипе, достаточно использовать центральный пик АПВ, аппроксимировав его каким-либо образом. На фиг. 9 показан процесс аппроксимации центрального пика апостериорной плотности вероятности и оценивания времени прихода сигнала. Здесь аппроксимация пика произведена полиномом четвертой степени.
Оценка времени прихода сигнала находится из решения уравнения

где Ppsm - аппроксимация центрального пика апостериорной плотности вероятности.
Искомая ВЗС  вычисляется по формуле
вычисляется по формуле

где -  и
и  - оценки ВПС в первом и втором пространственно-разнесенных пунктах приема соответственно, i≠j.
- оценки ВПС в первом и втором пространственно-разнесенных пунктах приема соответственно, i≠j.
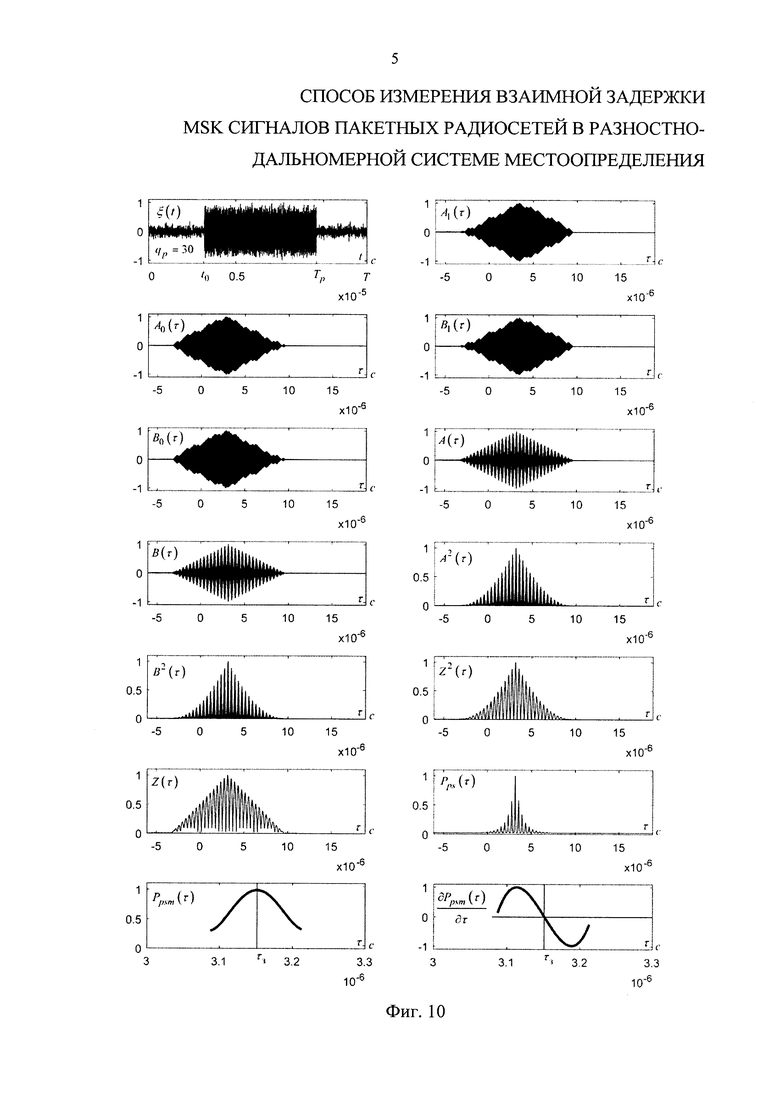
Сравнивая огибающие ВКФ Z(τ) прототипа (фиг. 3) и ВКФ предлагаемого способа (фиг. 10), видно, что огибающая ВКФ предлагаемого способа имеет многомодальную структуру. При этом точность измерения ВПС предлагаемым способом определяется шириной центрального пика огибающей ВКФ, который гораздо уже огибающей ВКФ прототипа, так как формируется элементарными импульсами модулирующей последовательности длительностью Тс, в то время как огибающая ВКФ прототипа формируется огибающей пакета длительностью Тр. Спектр модулирующей последовательности гораздо шире спектра огибающей пакета. Этим и объясняется выигрыш в точности измерения ВПС предлагаемым способом.
Предлагаемое изобретение иллюстрируется чертежами, на которых изображены:
на фиг. 1 - структурная схема РДС МО;
на фиг. 2 - осциллограммы сигналов в характерных точках прототипа;
на фиг. 3 - иллюстрация перелома КИ для частоты ƒ1;
на фиг. 4 - иллюстрация перелома КИ для частоты ƒ0;
на фиг. 5 - иллюстрация выпрямления КИ для частоты ƒ1;
на фиг. 6 - иллюстрация выпрямления КИ для частоты ƒ0;
на фиг. 7 - иллюстрация выпрямленного КИ для частоты ƒ1;
на фиг. 8 - иллюстрация выпрямленного КИ для частоты ƒ0;
на фиг. 9 - процесс аппроксимации центрального пика апостериорной плотности вероятности и оценивания времени прихода сигнала;
на фиг. 10 - осциллограммы сигналов в характерных точках предлагаемого способа;
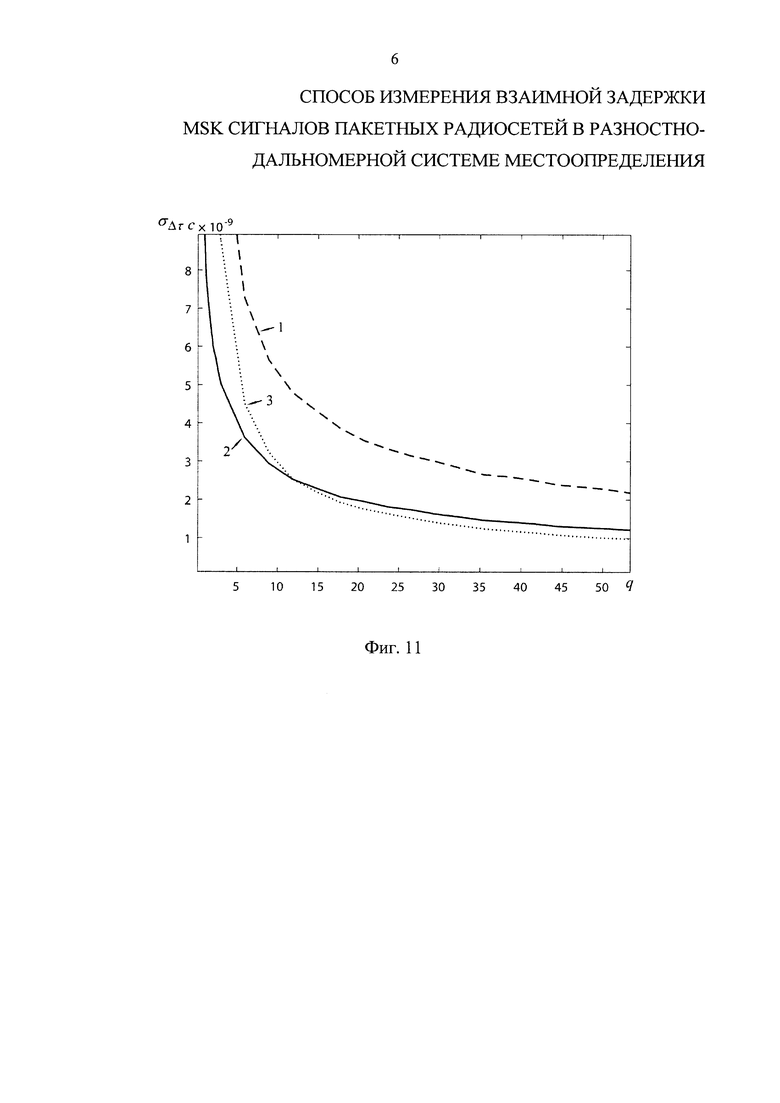
на фиг. 11 - графики зависимости погрешности оценивания взаимной задержки сигналов от отношения сигнал/шум.
Для исследования точностных характеристик предлагаемого способа и сравнения его с прототипом и аналогами создана имитационная модель УИВПС. При моделировании использовались следующие параметры сигнала: несущая частота - 100 МГц, длительность пакета - 6.4 мкс, число импульсов модулирующей псевдослучайной последовательности (ПСП) - 32, тактовая частота ПСП - 5 МГц, вид модуляции - MSK. Результаты моделирования приведены на фиг. 11, где изображены графики зависимости погрешности оценивания взаимной задержки сигналов от отношения сигнал/шум на входе УИВПС. Цифрами обозначены: 1 - график для прототипа; 2 - для предлагаемого способа; 3 - для аналогов, использующих ретрансляцию принимаемых сигналов с ППП на ЦППО.
Как видно из чертежей, по сравнению с прототипом, предлагаемый способ обеспечивает выигрыш по точности от 2 до 10 раз, в зависимости от отношения сигнал/шум. Таким образом, поставленная цель достигнута.
По сравнению с аналогами при большом отношении сигнал/шум (больше 40) погрешность предлагаемого способа превышает погрешность аналогов в среднем на 35%. С уменьшением отношения сигнал/шум разница постепенно уменьшается, и при значении q≈12 предлагаемый способ сравнивается по точности с аналогами. При дальнейшем уменьшении отношения сигнал/шум картина меняется и погрешность аналогов, по сравнению с предлагаемым способом, резко возрастает, при этом выигрыш предлагаемого способа достигает 50%. Этот факт очень важен, так как радиомониторинг ведется, как правило, при низких отношениях сигнал/шум.
Сопоставительный анализ предлагаемого технического решения с прототипом показывает, что предлагаемый способ отличается от известного действиями при построении ВКФ, а именно тем, что результирующая ВКФ вычисляется с помощью парциальных ВКФ принимаемого в точке приема сигнала с четырьмя гармоническими колебаниями двух частот  и
и  длительностью, равной длительности принимаемого сигнала (пакета) Tp, что до сих пор нигде не применялось. Таким образом, заявляемый способ соответствует критерию "новизна".
длительностью, равной длительности принимаемого сигнала (пакета) Tp, что до сих пор нигде не применялось. Таким образом, заявляемый способ соответствует критерию "новизна".
Источники информации
1. Патент RU №2335781, опубл. 10.10.2008 г.
2. Патент RU №2539968, опубл. 27.01.2015 г.
3. Кондратьев B.C. и др. Многопозиционные радиотехнические системы / Под редакцией проф. В.В. Цветнова. - М.: Радио и связь, 1986. - 264 с.
4. Громов В.А., Ворошилин Е.П., Миронов М.В. Оценка разности моментов прихода сигналов группировкой пространственно-разнесенных малых космических аппаратов. – Томск, ТУ СУР // Доклады ТУСУРа, №2 (22), часть 2, декабрь 2010. С. 7-13.
5. Вознюк В.В., Зайцев С.А., Толстоухов Д.А., Булаев О.А., Гусаков Н.В. Определение времени задержки приема сигнала пространственно-разнесенными сверхмалыми космическими аппаратами // Изв. Вузов. Приборостроение. 2008. Т. 51, №3. С. 13-17.
6. Радзиевский В.Г., Сирота А.А. Теоретические основы радиоэлектронной разведки. 2-е изд., испр. и доп. - М.: Радиотехника, 2004. - 432 с.
7. Файт А.В. Определение местоположения источника шумоподобного сигнала с использованием корреляционной функции // Материалы конференции "Научно-технические проблемы в промышленности". - СПб.: НИИ "Вектор", 2012, 29-31 мая. С. 21-22.
8. Ипатов В.П. и др. Поиск, обнаружение и измерение параметров сигналов в радионавигационных системах / Под редакцией Ю.М. Казаринова. - М.: Сов. радио, 1975. - 296 с.
9. Бендат Дж., Пирсол А. Прикладной анализ случайных данных: Пер. с англ. - М.: Мир, 1989. - 540 с.
10. Григорьев В.А. Сигналы зарубежных систем электросвязи. - СПб.: ВАС, 2007, 2007. - 368 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ВЗАИМНОЙ ЗАДЕРЖКИ МИНИМАЛЬНОГО ЧАСТОТНОГО СДВИГА (MSK) СИГНАЛОВ ПАКЕТНЫХ РАДИОСЕТЕЙ В РАЗНОСТНО-ДАЛЬНОМЕРНОЙ СИСТЕМЕ МЕСТООПРЕДЕЛЕНИЯ | 2020 |
|
RU2747108C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения | 2021 |
|
RU2790348C1 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы и устройство для его реализации | 2023 |
|
RU2826616C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2526094C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения (варианты) и устройство для их реализации | 2020 |
|
RU2740640C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения и устройство для его реализации | 2019 |
|
RU2719770C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения | 2019 |
|
RU2717231C1 |
| Разностно-дальномерный способ определения местоположения объектов | 2022 |
|
RU2790347C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2539968C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения и устройство для его реализации | 2019 |
|
RU2704793C1 |
Изобретение относится к области радиотехники и может быть использовано в разностно-дальномерных системах определения координат источников радиоизлучений (ИРИ), использующих в качестве координатно-информативного параметра взаимную задержку принятых радиосигналов. Достигаемый технический результат - повышение точности измерения взаимной задержки MSK (minimum shift keying) сигналов пакетных радиосетей при неизвестном законе первичной модуляции в разностно-дальномерных системах местоопределения за счет использования той особенности MSK сигналов, что прирост фазы на длительности одного элементарного импульса модулирующей последовательности составляет  . Суть способа заключается в том, что время прихода сигнала в пункт приема измеряется по временному положению максимума апостериорной плотности вероятности, построенной через модуль результирующей взаимно корреляционной функции (ВКФ), вычисляемой с помощью парциальных ВКФ принимаемого в точке приема сигнала с четырьмя гармоническими колебаниями двух частот длительностью, равной длительности принимаемого сигнала (пакета), при этом модуль ВКФ формируется элементарными импульсами модулирующей последовательности, что позволяет получить узкий пик апостериорной плотности вероятности даже при неизвестном законе первичной модуляции. 11 ил.
. Суть способа заключается в том, что время прихода сигнала в пункт приема измеряется по временному положению максимума апостериорной плотности вероятности, построенной через модуль результирующей взаимно корреляционной функции (ВКФ), вычисляемой с помощью парциальных ВКФ принимаемого в точке приема сигнала с четырьмя гармоническими колебаниями двух частот длительностью, равной длительности принимаемого сигнала (пакета), при этом модуль ВКФ формируется элементарными импульсами модулирующей последовательности, что позволяет получить узкий пик апостериорной плотности вероятности даже при неизвестном законе первичной модуляции. 11 ил.
Способ измерения взаимной задержки MSK (minimum shift keying) сигналов пакетных радиосетей в разностно-дальномерной системе местоопределения, заключающийся в том, что в периферийных пунктах приема разностно-дальномерной системы местоопределения осуществляют прием MSK сигналов пакетных радиосетей, измеряют время прихода сигналов (ВПС) относительно единой шкалы времени по положению максимума апостериорной плотности вероятности, построенной через модуль взаимно корреляционной функции (ВКФ) принимаемого сигнала и опорного колебания, и по линиям связи передают измеренные значения на центральный пункт приема и обработки, где вычисляется взаимная задержка сигналов  , где -
, где -  и
и  - оценки ВПС в i-м и j-м пространственно-разнесенных пунктах приема соответственно, i≠j, отличающийся тем, что модуль результирующей ВКФ Z(τ) вычисляется с помощью парциальных ВКФ принимаемого в точке приема сигнала с четырьмя гармоническими колебаниями двух частот
- оценки ВПС в i-м и j-м пространственно-разнесенных пунктах приема соответственно, i≠j, отличающийся тем, что модуль результирующей ВКФ Z(τ) вычисляется с помощью парциальных ВКФ принимаемого в точке приема сигнала с четырьмя гармоническими колебаниями двух частот  и
и  длительностью, равной длительности принимаемого сигнала (пакета) Тр:
длительностью, равной длительности принимаемого сигнала (пакета) Тр:



В(τ)=В1(τ)+В0(τ); А(τ)=А1(τ)+А0(τ); 
где  - частота несущей; Тс - длительность элементарного импульса модулирующей последовательности; А1(τ), A0(τ), В1(τ), В0(τ) - парциальные ВКФ принимаемого в точке приема сигнала с четырьмя гармоническими колебаниями двух частот; T - время наблюдения;
- частота несущей; Тс - длительность элементарного импульса модулирующей последовательности; А1(τ), A0(τ), В1(τ), В0(τ) - парциальные ВКФ принимаемого в точке приема сигнала с четырьмя гармоническими колебаниями двух частот; T - время наблюдения;  ;
;  ; Z(τ) - модуль результирующей ВКФ; D(⋅) - оператор выпрямления корреляционного интеграла (КИ), осуществляющий поиск "переломов" и изменение угла наклона КИ зеркально относительно горизонтальной линии, проходящей через точку "перелома".
; Z(τ) - модуль результирующей ВКФ; D(⋅) - оператор выпрямления корреляционного интеграла (КИ), осуществляющий поиск "переломов" и изменение угла наклона КИ зеркально относительно горизонтальной линии, проходящей через точку "перелома".
| Файт А.В | |||
| Определение местоположения источника шумоподобного сигнала с использованием корреляционной функции | |||
| Материалы конференции "научно-технические проблемы в промышленности" | |||
| СПб, НИИ "Вектор", 2012, 29-31 мая, с | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЗАИМНОЙ ЗАДЕРЖКИ СИГНАЛОВ | 2014 |
|
RU2568897C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2012 |
|
RU2521084C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЗАИМНОЙ ЗАДЕРЖКИ СИГНАЛОВ С ПРОГРАММНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ (ППРЧ) | 2006 |
|
RU2335781C1 |
| WO 2010072593 A1, 01.07.2010 | |||
| US 5870056 A, 09.02.1999 | |||
| WO 2004011955 A2, 05.02.2004. | |||

