Изобретение относится к радиотехнике и может быть использовано в многопозиционных радиотехнических системах для определения координат (ОК) заданных источников радиоизлучения (ИРИ) с кодовым или временным разделением каналов.
Известен способ измерения взаимной задержки MSK сигналов пакетных радиосетей в разностно-дальномерной системе местоопределения (см. Пат, РФ №2623094, МПК G01S 5/06, опубл. 22.06.2017, бюл. №18). Способ предполагает прием периферийными пунктами приема (ППП) разностно-дальномерной системы местоопределения (РДСМО) сигналов пакетных радиосетей, измерение времени прихода сигналов относительно единой шкалы времени, передачу по линии связи измеренных значений на центральный пункт приема и обработки (ЦППО), где вычисляют взаимные задержки сигналов ri,k, причем модуль взаимно корреляционной функции (ВКФ) R(τ) вычисляют с помощью парциальных ВКФ, чем достигается повышение точности измерения τi,k.
Однако аналогу присущи недостатки, ограничивающие его применение. Основными из них являются недостаточная точность ОК ИРИ, сложность реализации ППП. Способ предусматривает использование на всех ППП системы единого времени при измерении задержки сигналов. Кроме того, отсутствие привязки измеренных значений задержки сигнала на ППП к заданному источнику радиоизлучения при оценке их координат в условиях, когда работа нескольких ИРИ осуществляется на одной частоте (ИРИ с временным или кодовым разделением) приводит к ошибкам оценки координат ИРИ.
Известны Пат. РФ №№2258242, 2309420, 2521084 и др., эффективность применения которых резко падает при оценке координат ИРИ с временным или кодовым разделением каналов. В зависимости от длительности оценки задержек сигналов τi,k возникают ошибки ОК различной природы.
Известен разностно-дальномерный способ определения координат источника радиоизлучения (см. Пат. №2539968, МПК G01S 3/46, опубл. 27.01.2015, бюл. №3).
Способ-аналог заключается в приеме сигналов ИРИ разнесенными в пространстве периферийными пунктами приема, связанными с ЦППО командными линиями связи и линиями аналоговой ретрансляции сигналов, причем по командным линиям связи с ЦППО на ППП передают команды настройки на частоту сигнала ИРИ, а по линиям аналоговой ретрансляции принятые в ППП сигналы ИРИ передают на ЦППО, где измеряют разности времени приема сигналов в ППП и ЦППО τi,k, i и k - номера ЦППО и ППП соответственно, при этом задержки τi,k определяют как аргумент максимизации модуля взаимнокорреляционной функции, а на их основе вычисляют координаты ИРИ.
Аналог обеспечивает уменьшение количества вычислений при оценке временных задержек, принимаемых на ППП сигналов ИРИ в реализуемой ЦППО процедуре. Кроме того, выполнение ППП максимально упрощено, что способствует широкому применению способа-прототипа в РДСМО. Каждый ППП представляет собой совокупность устройств, выделяющих радиосигналы ИРИ на фоне помех, а также устройств, организующих аналоговые линии ретрансляции.
Однако аналогу присущ недостаток, ограничивающий его применение: недостаточная точность определения координат ИРИ, а в ряде случаев он теряет работоспособность. Причиной ошибок ОК прежде всего является многолучевость распространения радиоволн. В результате последние приходят на измеритель с разных направлений и с разной задержкой. Ошибочное определение координат возникает и в тех случаях, когда на частоте искомого ИРИ работают несколько корреспондентов (ИРИ) с временным или кодовым разделением каналов, например, сети Wi-Fi, GSM 2G, UMTS и др. Кроме того, в способе-аналоге сделано допущение о априорной известности с заданной точностью координат ЦППО (х,у)цппо и ППП (х,у)k, k=0, 1, 2, …, K. Однако в условиях развертывания РДСМО на стадионах, спортивно-концертных залах и др. это условие во многих случаях не выполняется. Сигналы глобальной навигационной спутниковой системы (ГНСС) GPS недоступны. В результате аналог теряет свою работоспособность.
Известен способ определения местоположения объекта навигации (см. Патент РФ №2676862, МПК G01C 21/20. опубл. 11.01.2019, бюл. №2), реализующий локальную систему определения координат. Способ обеспечивает определение координат объектов в заданном ограниченном районе в условиях отсутствия доступности сигналов ГНСС. Однако аналог не обеспечивает измерение координат ИРИ, а его использование для определения местоположения ЦППО и ППП экономически нецелесообразно в условиях развертывания на стадионах, помещениях спортивно-концертных залов.
Наиболее близким по технической сущности к заявляемому техническому решению является разностно-дальномерный способ определения координат источника радиоизлучения (см. Патент РФ №2719770, МПК G01S 3/46, опубл. 23.04.2020, бюл. №13).
Способ-прототип заключается в приеме сигналов ИРИ пространственно разнесенными ППП с известными координатами, связанными с ЦППО командными линиями связи и линиями аналоговой ретрансляции сигнала, причем командными линиями связи с ЦППО на ППП передают команды настройки на частоту сигнала ИРИ, а по линиям аналоговой ретрансляции принятые в ППП сигналы ИРИ передают на ЦППО, где измеряют разность времени приема этих сигналов в ППП и ЦППО τk, где k ∈ 1, 2, …, K - номера ППП и измерительных баз ЦППО - ПППk, при этом на подготовительном этапе на ЦППО в прямоугольном виде задают контролируемый район (КР), границы которого по осям 0х и 0у обозначают через А и В соответственно, КР делят на элементарные участки со сторонами а и b по осям 0х и 0у соответственно, площадь которых выбирают исходя из заданной точности Δd определения координат ИРИ, определяют координаты центров элементарных участков (Χi, Yj), на основе которых формируют матрицу координат N размерности А' × В', где Χi = ai, i=1, 2, …, Α/a=А', Yj=bj, j=1, 2, …, B/b=В', для каждого элемента (Xi, Yj) матрицы координат N всех K измерительных баз определяют эталонные значения разности времени прихода сигнала на ЦППО и ПППk τi,j,k, формируют K эталонных матриц Mk, k=1, 2, …, K, элементами каждой из которых является соответствующее координатам (Xi, Yj) эталонное значение разности задержки прихода сигналов τi,j,k для k-й измерительной базы ЦППО - ПППk, а в процессе работы для учета разности времени приема сигнала вычисляют взаимнокорреляционную функцию (ВКФ) сигналов Rk[τ], принятых на k-м ППП, k=1, 2, …, K, и на ЦППО, для значений временного сдвига в интервале τ ∈ (-c-1dk, c-1dk), где dk - расстояние между ЦППО и k-ы ППП, с заданным шагом Δτ, соответствующим частоте дискретизации сигнала, на основе K эталонных матриц Mk формируют корреляционные матрицы Фk путем замены элементов задержки τi,j,k на соответствующие им измеренные значения ВКФ Rk[τi,j], значения матриц Фk, k=1, 2, …, K, суммируют по всем K измерительным базам  а за наиболее вероятное расположение ИРИ принимают координаты точки (Хi, Yj), соответствующей максимальному значению элемента матрицы
а за наиболее вероятное расположение ИРИ принимают координаты точки (Хi, Yj), соответствующей максимальному значению элемента матрицы 
Прототип обеспечивает повышение точности определения координат заданного источника радиоизлучения в условиях работы на одной частоте нескольких ИРИ с временным или кодовым разделением каналов.
Однако способу-прототипу присущ недостаток, ограничивающий его применение. Прототип и известные аналоги сохраняют свою работоспособность при наличии достоверных данных о координатах всех элементов РДСМО. Местоположение ЦППО и ППП может быть определено с использованием сигналов ГНСС или в ручном режиме. В условиях недоступности сигналов ГНСС лишь второй подход сохраняет работоспособность.
Ручной режим предполагает определение координат элементов РДСМО путем измерения удаления и угла отклонения ЦППО и ППП от объектов с известными координатами. Данному подходу присущи существенные временные издержки и зависимость качества выполняемых операций от степени подготовленности операторов. Метод находит применение при стационарном размещении РДСМО на объекте. Для оперативного развертывания и уточнения позиций ППП при необходимости их перемещения в ходе выполняемых измерений этот подход теряет свою работоспособность.
Целью заявляемого технического решения является разработка разностно-дальномерного способа (РДС) определения координат ИРИ, обеспечивающего повышение оперативности при развертывании измерителя и его перемещениях в условиях отсутствия доступности сигналов ГНСС.
Поставленная цель достигается тем, что в известном РДС определения координат ИРИ, основанном на приеме сигналов пространственно разнесенными периферийными пунктами приема, связанными с центральным пунктом приема и обработки командными линиями связи и линиями аналоговой ретрансляции сигнала, причем командными линиями связи с ЦППО на ППП передают команды настройки на частоту сигнала ИРИ, а по линиям аналоговой ретрансляции принятые в ППП сигналы ИРИ передают на ЦППО, где измеряют разность времени приема этих сигналов в ППП и ЦППО τk, k ∈ 1, 2, …, K - номера ППП и измерительных баз ЦППО - ПППk, при этом на подготовительном этапе на ЦППО в прямоугольном виде задают контролируемый район (КР), границы которого по осям 0х и 0у обозначают через А и В соответственно, КР делят на элементарные участки со сторонами а и b по осям 0х и 0у соответственно, площадь которых выбирают исходя из заданной точности Δd определения координат ИРИ, определяют координаты центров элементарных участков (Χi, Yj), на основе которых формируют матрицу координат N размерности А' × В', где Xi=ai, i=1, 2, …, Α/a=А', Yj=bj, j=1, 2, …, B/b=B', для каждого элемента (Xi, Yj) матрицы координат N всех K измерительных баз определяют эталонные значения разности времени прихода сигнала на ЦППО и ПППk τi,j,k, формируют K эталонных матриц Mk, k=1, 2, …, K, элементами каждой из которых является соответствующее координатам (Xi, Yj) эталонное значение разности задержки прихода сигналов τi,j,k для k-й измерительной базы ЦППО - ПППk, а в процессе работы для учета разности времени приема сигнала вычисляют взаимно-корреляционную функцию сигналов Rk[τ], принятых на k-м ППП, k=1, 2, …, K, и на ЦППО, для значений временного сдвига в интервале τ ∈ (-c-1dk, c-1dk), где dk - расстояние между ЦППО и k-м ППП, с заданным шагом Δτ, соответствующим частоте дискретизации сигнала, на основе К эталонных матриц Мk формируют корреляционные матрицы Фk путем замены элементов задержки τi,j,k на соответствующие им измеренные значения ВКФ Rk[τi,j], значения матриц Фk, k=1, 2, …, K, суммируют по всем K измерительным базам  а за наиболее вероятное расположение ИРИ принимают координаты точки (Xi, Yj), соответствующей максимальному значению элемента матрицы
а за наиболее вероятное расположение ИРИ принимают координаты точки (Xi, Yj), соответствующей максимальному значению элемента матрицы  на подготовительном этапе в условиях отсутствия доступности сигналов ГНСС определяют координаты местоположения лишь ЦППО и опорного ППП1 в ручном режиме посредством измерения удаления и угла отклонения ЦППО и ППП1 от точки или объекта с известными координатами, а в качестве ППП1 используют один из K ППП, в состав ЦППО и ППП1 дополнительно вводят по передатчику, которые предназначены для излучения контрольных сигналов, определяют расстояние dЦППО,k от ЦППО до всех K ППП путем излучения ЦППО контрольных сигналов в направлении каждого ППП и приеме от них ретранслированного сигнала с последующим определением их задержки Тk,
на подготовительном этапе в условиях отсутствия доступности сигналов ГНСС определяют координаты местоположения лишь ЦППО и опорного ППП1 в ручном режиме посредством измерения удаления и угла отклонения ЦППО и ППП1 от точки или объекта с известными координатами, а в качестве ППП1 используют один из K ППП, в состав ЦППО и ППП1 дополнительно вводят по передатчику, которые предназначены для излучения контрольных сигналов, определяют расстояние dЦППО,k от ЦППО до всех K ППП путем излучения ЦППО контрольных сигналов в направлении каждого ППП и приеме от них ретранслированного сигнала с последующим определением их задержки Тk,  где с - скорость света, tk - внутренняя задержка сигнала в k-м ППП, на ЦППО определяют расстояние dl,k между опорным ППП1 и остальными K - 1 ППП путем измерения задержки
где с - скорость света, tk - внутренняя задержка сигнала в k-м ППП, на ЦППО определяют расстояние dl,k между опорным ППП1 и остальными K - 1 ППП путем измерения задержки  на трассе ППП1 - ПППk, k=2, 3, …, K, на основе излучения передатчиком ППП1 контрольного сигнала в направлении ПППk, приеме на ППП1 от него ретранслированного сигнала с последующей передачей его на ЦППО
на трассе ППП1 - ПППk, k=2, 3, …, K, на основе излучения передатчиком ППП1 контрольного сигнала в направлении ПППk, приеме на ППП1 от него ретранслированного сигнала с последующей передачей его на ЦППО  на основе теоремы косинусов определяют углы в формируемых треугольниках ЦППО - ППП1 - ПППk на основе расстояний между ЦППО, опорным ΠΠΠ1 и искомым ППП, определяют координаты k-то ППП (х, у)k на основе полученных расстояний и углов с использованием координат ЦППО (х, у)ЦППО и опорного ΠΠΠ1 (x, y)1.
на основе теоремы косинусов определяют углы в формируемых треугольниках ЦППО - ППП1 - ПППk на основе расстояний между ЦППО, опорным ΠΠΠ1 и искомым ППП, определяют координаты k-то ППП (х, у)k на основе полученных расстояний и углов с использованием координат ЦППО (х, у)ЦППО и опорного ΠΠΠ1 (x, y)1.
Благодаря новой совокупности существенных признаков за счет реализации с минимальными издержками локальной навигационной системы в заявляемом способе обеспечивается повышение оперативности при развертывании РДСМО и ее перемещениях в условиях отсутствия доступности сигналов ГНСС.
Заявляемый способ поясняется чертежами, на которых:
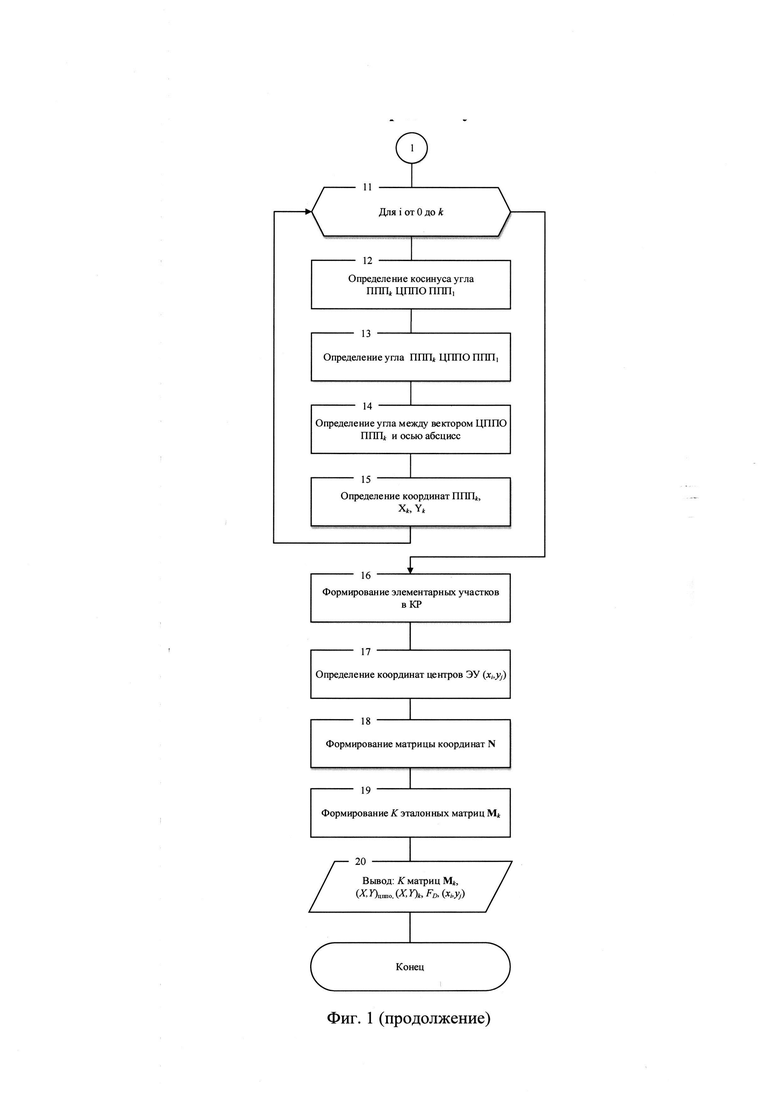
на фиг. 1 - показан обобщенный алгоритм РДСМО на подготовительном этапе работы в соответствии с заявляемым изобретением;
на фиг. 2 - приведен обобщенный алгоритм РДСМО в процессе измерения координат ИРИ в соответствии с заявляемым изобретением;
на фиг. 3 - приведен алгоритм поиска максимального значения взаимнокор-реляционной функции Rk[τ];
на фиг. 4 - иллюстрируется рисунок, поясняющий порядок определения угла ω ПППk - ЦППО - ППП1 в соответствующем треугольнике;
на фиг. 5 - порядок задания контролируемого района:
а) задание границ контролируемого района;
б) формирование элементарных участков;
в) определение координат центров элементарных участков;
на фиг. 6 - порядок формирования матрицы координат N;
на фиг. 7 - порядок формирования первой из K:
а) эталонной матрицы Mk;
б) корреляционной матрицы Фk;
на фиг. 8 - приведена обобщенная структурная схема устройства, реализующая данный способ;
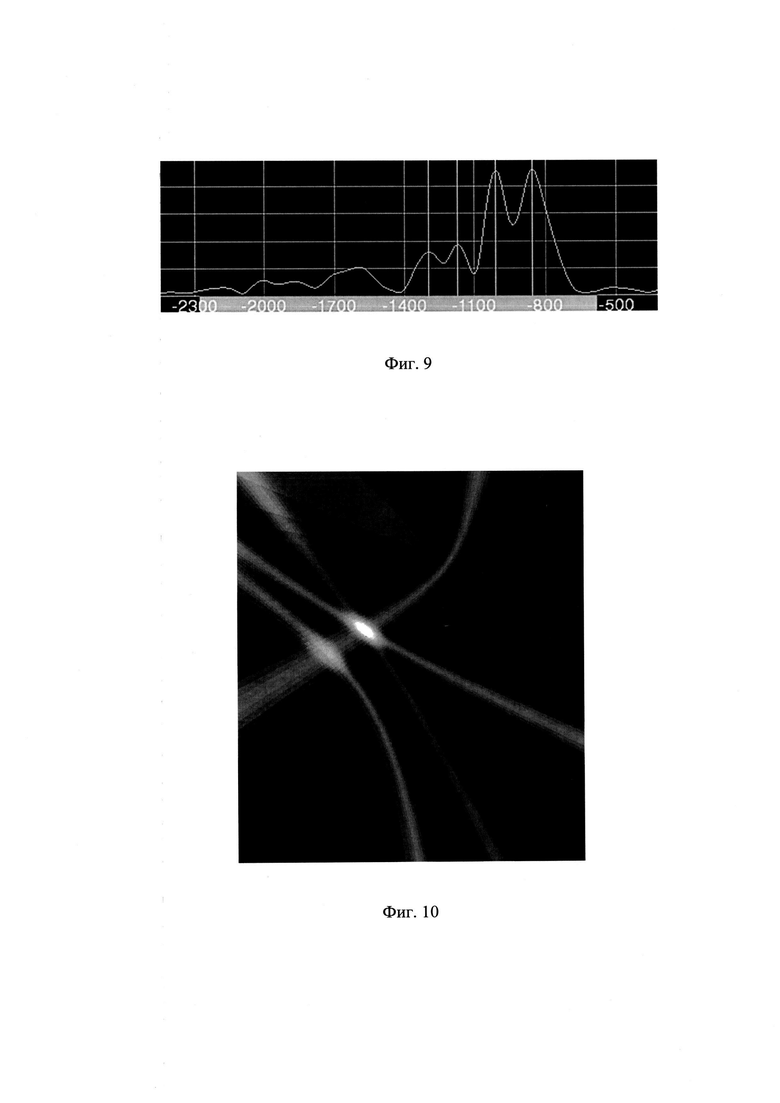
на фиг. 9 - приведено измеренное значение ВКФ для одной измерительной
базы;
на фиг. 10 - представлена визуализация суммы проекций ВКФ трех измерительных баз;
на фиг. 11 - приведена зависимость среднеквадратического отклонения погрешности (СКО) при измерении координат ППП от погрешности в определении ме-таположения ЦППО и ППП1;
на фиг. 12 - показана зависимость СКО погрешности определения координат ППП от погрешности измерения момента прихода сигнала;
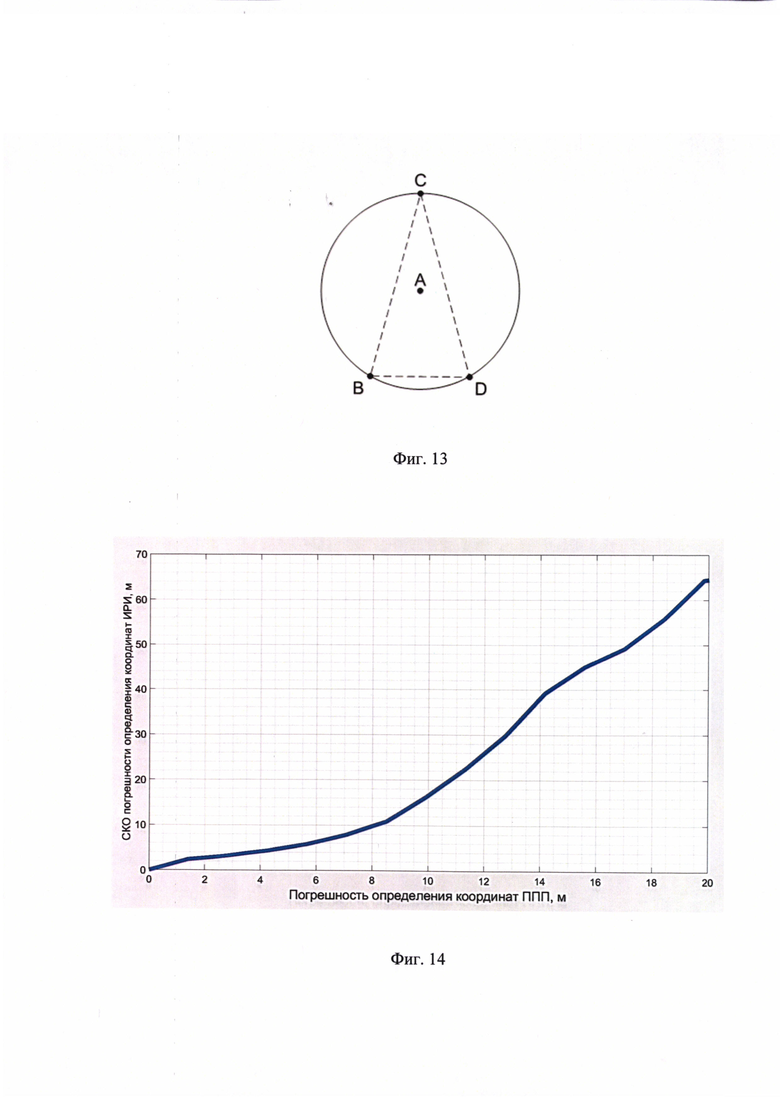
на фиг. 13 - вариант пространственного размещения ППП (А-ЦППО, И - ППП1, С - ППП2, D - ППП3);
на фиг. 14 - приведена зависимость СКО погрешности измерения координат ИРИ от погрешности в определении местоположения ППП.
Реализация заявленного способа поясняется следующим образом. Подготовительный этап (см. фиг. 1) предполагает задание границ контролируемого района, выполнение анализа по оптимизации размещения элементов РДСМО (ЦППО и K ППП) для достижения максимальной точности определения координат контролируемых ИРИ.
Известно, что точностные характеристики РДС в основном зависят от: точности измерения временных параметров на ЦППО;
геометрии размещения элементов РДСМО;
точности определения координат элементов РДСМО (ЦППО и K ППП).
Реализация последнего из названных требований связана с наибольшими трудностями в условиях размещения КР в помещениях спортивно-концертных залов, стадионах и др., в условиях отсутствия доступности сигналов ГНСС. Известные способы определения координат (см. Патенты РФ №№2704793, 2719770, 2717231, 2740640) предполагают наличие достоверной информации о местоположении ЦППО и всех ППП.
В названных условиях используют ручной режим определения координат элементов РДСМО. Последний предполагает измерение удаления и угла отклонения ЦППО и опорного ППП1 от точки или объекта с известными координатами (угол или окно задания и т.д.). Данный процесс трудоемкий, предполагает определенный уровень подготовленности оператора и главное - существенные временные затраты. Последние составляют 10-15 минут на один элемент РДСМО при выполнении работ подготовленным специалистом. В связи с этим оперативное развертывание оборудования РДСМО или перенос его элементов в процессе работы как правило невозможен.
Для описания пространственного размещения всех элементов РДСМО (получения координат ППП) необходимо знание:
координат размещения двух ее элементов ЦППО (х, у)ЦППО и опорного ППП1 (х, y)1;
взаимных расстояний от ЦППО до всех ППП и от опорного ППП1 до всех остальных ППП;
углов в треугольниках между ЦППО, опорным ППП1 и искомым ППП;
внутренних задержек сигналов ПППk tk.
В предлагаемом способе на подготовительном этапе (на фиг. 1) в ручном или ином доступном режиме определяют координаты двух точек, предназначенных для развертывания ЦППО и опорного ППП1.
Определяют тип локальной системы координат (СК), в которой будет выполняться определение координат ИРИ. Выбор СК зависит от конкретных условий ее применения. Для названных выше ограничений предпочтительно использование метровых координат с их началом в левой нижней зоне контролируемого района. В качестве последнего может быть использован план строения или местности. Зададим позиции ЦППО (х, у)ЦППО и опорного ППП1 в этой системе координат. Далее для упрощения расчетов определим новую локальную СК с центром в точке развертывания ЦППО и определим позицию опорного ППП1
В качестве опорного ППП может быть назначен любой из их совокупности K, k=1, 2, …, K.
Для каждой полученной измерительной базы, где источником контрольного сигнала является ЦППО, определяют значение временного сдвига Тk (см. фиг. 3)

где τа - аналитически определенный отсчет с максимальным значением ВКФ Rk,
 - количество отсчетов ВКФ, TD=1/FD - период дискретизации, FD - частота дискретизации.
- количество отсчетов ВКФ, TD=1/FD - период дискретизации, FD - частота дискретизации.
Цифровая обработка сигналов приводит к снижению точностных характеристик. Причина состоит в том, что нет объективных оснований для того, чтобы время задержки между парой сигналов было кратно периоду дискретизации или сколь либо близко к кратному значению. В этом случае положение во времени наибольшего по абсолютному значению отсчета дискретной ВКФ не является точной оценкой времени задержки Тk.
Для повышения точности оценки времени задержки используют метод, основанный ца интерполяции абсолютных значений ВКФ Rk в окрестностях ее максимума двух соседних отсчетов. Для этой цели подходит полином второго порядка A2(τ)

Для нахождения τa определяют абсолютное значение максимального по модулю отсчета ВКФ Еk(х2, y2) и определяют две соседние ближайшие точки, располагающиеся слева (x1, y1) и справа (x3, y3). Далее определяют коэффициенты параболы и находят ее максимум:
х2=maxEk[τ], х1=х2 - TD, х3=х2+TD, у2=Еk[х2], у1=Еk[х1], y3=Еk[х3],




После измерения временного сдвига для каждой базы определяют удаление ПППk от ЦППО

где с - скорость света.
На следующем этапе источником контрольного сигнала является опорный ППП1. С его помощью (аналогично сигналам ЦППО) определяют значения временного сдвига  (см. фиг. 1). Для этого принятый от ПППk ретранслированный сигнал ППП1 далее поступает на ЦППО для измерения временного сдвига
(см. фиг. 1). Для этого принятый от ПППk ретранслированный сигнал ППП1 далее поступает на ЦППО для измерения временного сдвига  на трассе ППП1 - ПППk. После нахождения
на трассе ППП1 - ПППk. После нахождения  для каждой измерительной базы определяют удаление ПППk, k=1, 2, …, K, от опорного ППП1 d1,k
для каждой измерительной базы определяют удаление ПППk, k=1, 2, …, K, от опорного ППП1 d1,k

Зная удаление ПППk от ЦППО становится возможным определение его координат

где а - угол между вектором ЦППО - ПППk и осью абсцисс,  - позиция ПППk в системе координат с центром в точке расположения ЦППО.
- позиция ПППk в системе координат с центром в точке расположения ЦППО.
В связи с тем, что координаты опорного ПППХ известны (x, y)1, угол а определяют как сумму углов (см. фиг. 4)
а=ϕ+ω,
где ϕ - угол между вектором ЦППО – ППП1 и осью абсцисс; ω - угол ПППk - ЦППО – ППП1 в соответствующем треугольнике.
Угол ϕ находят в соответствии со следующим выражением

где
Для каждого ПППk угол ω определяют на основе теоремы косинусов следующим образом

В связи с тем, что существует два возможных треугольника, симметричных относительно стороны ЦППО – ΠΠΠ1. Оператору необходимо определить расположение ППП - по часовой стрелке или против. Если ППП располагают по часовой стрелке, то

После определения координат всех элементов РДСМО на ЦППО приступают к делению контролируемого района на элементарные участки по аналогии со способом-прототипом. Для этого границы КР по осям 0х и 0у обозначают соответственно через А и В (см. фиг. 5 а, б и в).
Далее определяют позицию ПППk (х, у)k в системе координат КР, заданного на подготовительном этапе. Для этого выполняем следующее

Контролируемый район делят на элементарные участки со сторонами а и b по осям 0х и 0у соответственно, площадь которых выбирают исходя из заданной точности Δd определения координат ИРИ. На практике, как правило, a=b. Определяют координаты центров элементарных участков (Xi, Yj), на основе которых формируют матрицу координат N размерности A'× В', где Χi=ai, i=1, 2, …, А/а=Α', Yj=bj, j=1, 2, …, B/b=В' (см. фиг. 6). Для каждого элемента (Хi, Yj) матрицы координат N всех K измерительных баз определяют эталонные разности времени прихода сигнала на ЦППО и ПППk τi,j,k в соответствии с выражением

где с - скорость света, [Х0, Y0) - координаты ЦППО, (Хk, Yk) - координаты k-го ППП, k - 1, 2, 3 - номера ППП.
Далее формируют K эталонных матриц Mk, k=1, 2, …, K, элементами каждой из которых является соответствующее координатам (Xi, Yj) эталонное значение разности задержке прихода сигнала τi,j,k для k-й измерительной базы ЦППО - ПППk (см. фиг. 7). Далее задают МАС-адрес пользователя  длительность интервала анализа Δt и его начало t', частоту сигнала ƒн.
длительность интервала анализа Δt и его начало t', частоту сигнала ƒн.
Обобщенная структурная схема устройства, реализующего данный способ, приведена на фиг. 8. Здесь:
1.1-1.3 - периферийные пункты приема (ППП);
2 - центральный пункт приема и обработки (ЦППО);
3 - центральный пост обработки (ЦПО);
4.1-4.3 - тракты приема радиосигналов ППП;
5.1-5.3 - тракты ретрансляции радиосигналов ППП;
6 - первая входная шина ЦППО;
7 - радиопередатчик командной линии связи;
8.0-8.3 - тракты приема радиосигналов ЦППО;
9.0-9.3 - аналого-цифровые преобразователи;
10 - вторая входная шина ЦППО;
11 - блок управления;
12 - тракт анализа;
13.0-13.3 - блоки памяти;
14 - тактовый генератор;
15 - вычислитель;
16 - блок формирования корреляционных матриц Фk;
17 - блок формирования эталонных матриц Мk;
18 - блок формирования матрицы координат N;
19 - сумматор;
20 - блок принятия решения;
21 - третья входная шина ЦППО;
22 - четвертая входная шина ЦППО;
23 - пятая входная шина ЦППО;
24 - выходная шина ЦППО;
25.0-25.1 - передатчики контрольных каналов.
Таким образом устройства содержит три ППП (k ∈ 1, 2 и 3) и один ЦППО (k ∈ 0).
Каждый ППП сигналов ИРИ с временным или кодовым разделением в общем виде представляет совокупность последовательно соединенных трактов приема сигналов ИРИ названных классов и трактов, реализующих аналоговую ретрансляцию излучений. ЦППО содержит радиопередатчик, предназначенный для реализации командной линии связи, совокупность из K+1 трактов приема радиосигналов (из них K трактов, предназначенных для приема ретранслированных ППП сигналов) и центральный пункт обработки в составе: блок управления, тракт анализа, K+1 аналогово-цифровых преобразователей (АЦП), K+1 блоков памяти, вычислитель, блок формирования матриц эталонных значений Mk, блок формирования матрицы координат N, блок формирования корреляционных матриц Фk, сумматор и блок принятия решения. При этом все ППП настраиваются на заданную частоту сигнала, значение которой поступает по командным каналам связи от ЦППО.
Сигналы ИРИ, принятые на ЦППО и ППП имеют вид

соответственно.
Последние с выходов приемных трактов ППП поступают на входы соответствующих трактов аналоговой ретрансляции и далее излучают в эфир.
На ЦППО эти излучения принимают с помощью соответствующих K приемных трактов и запоминаются на заданное время Δt. Одновременно с ними осуществляют прием сигналов этого ИРИ и на собственный K+1-вый приемный тракт в течение того же интервала времени Δt, в течение которого осуществляют их анализ.
Для этого принятые в K+1-м приемном тракте ЦППО сигналы с помощью АЦП и демодулятора (снимают DBPSK модуляцию), превращая аналоговый сигнал x0(t) в битовую последовательность a0(t) в тракте анализа. На его основе осуществляют поиск преамбулы и заголовка PLCP. В преамбуле в поле SFD содержится значение 0xF3A0, которое служит индикатором начала фрейма. В заголовке PLCP в поле Signal содержится информация о способе цифровой модуляции самих данных (МАС-фрейма). Значение 0х0А соответствуют DBPSK модуляции, a 0x14-DQPSK модуляции. Кроме того, в заголовке PLCP содержится информация о длине данных в МАС-фрейме.
Известны МАС-фреймы различных типов: CTS, PS-Poll, CF-End, CF-End+CF-Ack, Block AckReq. Помимо перечисленных, существуют и другие типы МАС-фреймов, однако в них отсутствует информация о МАС-адресах передающего устройства. Поэтому их использование затруднено для местоопределения ИРИ.
У всех фреймов в их начале есть поле Frame Control, где содержится информация о типе данного фрейма - это поля Туре и Subtype. В поле ТА у фреймов содержится МАС-адрес передающего устройства. Для получения названных данных необходимо предварительно выполнить цифровую демодуляцию МАС-фрейма в соответствии с содержимом поля Signal заголовке PLCP.
В случае совпадения МАС-адреса Ρ обнаруженного фрейма с заданным адресом Pi устройства, участок сигнала с границами от начала преамбулы PLCP t*до конца МАС-фрейма t1 используют для нахождения взаимнокорреляционной функции принятого сигнала Rk[τ]. При этом свертка принятых ЦППО и ППП сигналов Rk может осуществляться как в аналоговом, так и в дискретном виде. В случае использования дискретных сверток (предлагаемый вариант устройства) запомненные сигналы от ППП дополнительно оцифровывают.
Дополнительная синхронизация при измерении τk не требуется в связи с тем, что обработку всех K+1 сигналов осуществляют в одном месте. Нахождение задержек τk с последующим определением координаты ИРИ выполняют в соответствии со способом-прототипом.
Вычисление ВКФ сигналов Rk[τ], принятой k-й измерительной базой, k=1, 2, …, K, осуществляют для значений временного сдвига τ ∈ (-c-1dk; c-1dk], где  - расстояние между ЦППО и k-м ППП с заданным шагом τ0 по формуле:
- расстояние между ЦППО и k-м ППП с заданным шагом τ0 по формуле:

где τ - временной сдвиг между сигналами (задержка), u0(t),  - сигнал, принятый на ЦППО и сопряженный с ним сигнал, uk(t),
- сигнал, принятый на ЦППО и сопряженный с ним сигнал, uk(t),  - сигнал, принятый на k-м ППП и сопряженный с ним сигнал. На фиг. 9 приведено значение ВКФ для одной измерительной базы.
- сигнал, принятый на k-м ППП и сопряженный с ним сигнал. На фиг. 9 приведено значение ВКФ для одной измерительной базы.
После этого полученные значения каждой рассчитанной ВКФ Rk[τ] проецируют на элементы соответствующей k-й эталонной матрицы Mk (элементы зоны поиска). В матрице Mk каждый элемент τi,j,k соответствует определенной точке (Xi, Yj). По ранее полученным значениям τi,j,k для каждой точки (Хi, Yj) контролируемого района рассчитывают значения Rk[τi,j] в соответствии с (16) и, следовательно, соответствующие этой точке. Названная операция соответствует формированию соответствующей (из набора в K) корреляционной матрицы Фk.
Формирование K корреляционных матриц Фk осуществляют путем проецирования полученных значений ВКФ Rk[τi,j] в соответствующих местах эталонной матрицы Mk, а следовательно, в соответствующих точках (Хi, Yj).
На следующем этапе на зону поиска (матрицы Фk) значения Rk[τ] суммируют по всем K измерительным базам:  За наиболее вероятное местоположение заданного ИРИ принимают координаты точки (Xi, Yj), соответствующее максимальному значению элемента матрицы
За наиболее вероятное местоположение заданного ИРИ принимают координаты точки (Xi, Yj), соответствующее максимальному значению элемента матрицы 
Такой подход к ОК заданного ИРИ обеспечивает повышение точности выполняемых измерений. Известно, что во взаимнокорреляционных функциях R[τ] присутствуют побочные максимумы от отраженных сигналов, иногда с максимальным значением. Последние имеют местоположение на временной оси не соответствующее положению ИРИ. В известных способах и устройствах это приводит к ошибкам измерений координат. В предложенном способе значение ВКФ R[τi,j] принимает максимальное значение (глобальный максимум) благодаря тому, что в точке (Xi, Yj) оно равно сумме величин корреляций, соответствующих местоположению истинным локальным максимумам Rk[τ] всех трех измерительных баз. В свою очередь локальные максимумы, полученные от переотраженных сигналов всех трех измерительных баз, будут распределены случайным образом. Их суммирование не дает глобального максимума ВКФ. На фиг. 10 представлена визуализация суммы проекций ВКФ на контролируемый район. Наблюдается пересечение трех линий, образованных истинными пиками ВКФ. Побочные пики не внесли ошибки при определении местоположения ИРИ.
Таким образом имеет место следующая последовательность действий на подготовительном этапе:
1. Задание контролируемого района в прямоугольном виде, в котором будет осуществляться поиск и местоопределение заданного ИРИ. Границы по 0х и 0у обозначают через А и В соответственно (см. фиг. 5а).
2. Выбор позиций для ЦППО и K ППП, обеспечивающих максимальную точность определения координат ИРИ.
3. Определение координат ЦППО (х, у)ЦППО и ППП1 [х, у)1 одним из доступных методов.
4. Определение расстояния dЦППО,k от ЦППО до всех K ППП путем излучения ЦППО контрольных сигналов в направлении каждого из ППП и приема от них ретранслированного сигнала с последующим определением их задержки Тk (см. выражение 7).
5. Определение расстояния между опорными ППП1 и остальными K - 1 ППП d1,k в соответствии с (8).
6. На основе теоремы косинусов определение углов в формируемых треугольниках ЦППО - ППП1 - ПППk на основе расстояний между ЦППО, опорным ППП1 и k-м искомым ППП (выражения 10, 11 и 12).
7. Определение координат k-го ПППk (х, у)k на основе полученных данных о расстоянии dЦППО,k и угле между вектором ЦППО - ПППk и осью абсцисс.
8. КР делят на элементарные участки со сторонами а и b по осям 0х и 0у соответственно, площадь которых выбирают исходя из заданной точности Δd определения координат ИРИ (см. фиг. 5б).
9. Определение координат центров элементарных участков (Xi, Yj) (см. фиг. 5в).
10. Формирование матрицы координат N размерности А' × В', на основе координат (Xi, Yj), где Xi=ai, i=1, 2, …, А/а=A', Yi=bj, j=1, 2, …, B/b=B' (см. фиг. 6).
11. Определение для каждого элемента [Xi, Yj) матрицы N и всех K измерительных баз эталонных значений разности времени прихода сигнала на ЦППО и ПППk τi,j,k.
12. Формирование K эталонных матриц Mk, k=1, 2, …, K, элементами каждой из которых является соответствующее координатам (Xi, Yj) эталонное значение разности задержки прихода сигнала τi,j,k для k-й измерительной базы ЦППО - ПППk (см. фиг. 7).
В процессе работы по аналогии с прототипом осуществляют:
1. Накопление в ЦППО сигналов за некоторый промежуток времени Δt от всех ППП и ЦППО.
2. Демодуляцию накопленного сигнала, принятого собственно ЦППО и модулированного посредством DBPSK модуляции. В результате получают массив битов.
3. Поиск в массиве битов SFD кода - значения 0xF3A0 (11110011101000002).
4. Чтение заголовка PLCP- следующие 48 бит после SFD кода.
5. Определение способа модуляции МАС-фрейма: в поле Signal заголовка PLCP: значение 0х0А (000010102) соответствуют DBPSK модуляции, 0x14 (000101002) - DQPSK - модуляции.
6. Определение длины МАС-фрейма - поле Length заголовка PLCP.
7. Демодуляцию МАС-фрейма.
8. Определение МАС-адреса устройства.
9. Если МАС-адрес устройства соответствует МАС-адресу искомого устройства, то выделяют часть сигнала, соответствующего началу преамбулы PLCP и окончанию МАС-фрейма, в противном случае начиная с конца текущего фрейма, осуществляется поиск следующего фрейма (пункт 3).
10. Вычисление взаимнокорреляционной функции сигналов Rk[τ], принятых на k-м ППП, k=1, 2, …, K, и на ЦППО для значений временного сдвига в интервале τ ∈ (-c-1dk, c-1dk), где dk - расстояние между ЦППО и k-м ППП, с заданным шагом Δτ.
11. Формирование К корреляционных матриц Фk путем замены элементов задержки τi,j,k матриц Mk на соответствующие им измеренные значения ВКФ Rk[τi,j].
12. Суммирование матриц Фk по всем K измерительным базам (см. фиг. 10)
13. Принятие за наиболее вероятное местоположение заданного ИРИ точки с координатами (Xi,Yj), соответствующей максимальному значению элемента  матрицы
матрицы 
Выполнена оценка эффективности предлагаемого способа определения координат ИРИ. Определим суммарные временные затраты на развертывание измерителя в соответствии с предлагаемым изобретением и прототипа в составе ЦППО и трех ППП. Практические испытания показали, что для ручного режима определения координат ЦППО и каждого ППП требуется примерно по 15 минут.На определение координат второго и третьего ППП в предлагаемом способе дополнительно требуется примерно 15+15=30 миллисекунд. Временем на анализ КР (деление, определение координат центров элементарных участков) можно пренебречь. Оно составляет десятки миллисекунд. В результате имеем: прототип - 60 минут, предлагаемый способ - 30 минут.Тогда выигрыш по скорости развертывания (оперативность) η для названных условий составляет
Следует отметить, что при увеличении количества ППП значение ηη линейно возрастает.
Оценка точностных характеристик предлагаемого способа определения координат ИРИ выполнена на основе математического моделирования в среде Visual Studio 2019 с использованием языка программирования С#. Для отображение результатов моделирования использована среда MATLAB. Моделирование выполнено на компьютере со следующими характеристиками:
процессор - Intel® Core™i7-7500UCHU@ 2.70 GHz;
оперативная память - 32 ГБ;
видеоадаптер - Intel® HD Graphics 620.
Погрешность оценивания определилась как второй начальный момент распределения модуля вектора ошибок

где δx2, δy2 - среднее значение квадратов соответствующих отклонений от истинных координат в произвольно выбранной системе координат.
Точность определения координат ИРИ находится в зависимости от величины погрешности в измерении координат ЦППО и ППП, взаимного местоположения ЦППО и ППП, их пространственного положения относительно КР (анализ последнего выполнен в рамках Пат. РФ №2717231, опубл. 19.03.2020). В свою очередь точность определения координат ППП в предлагаемом способе находится в зависимости от погрешностей при измерении временных параметров на основе ВКФ.
В выполненном анализе погрешность определения координат ЦППО и ППП1 задана в пределах от 0 до 50 нс. Погрешность определения моментов прихода сигнала на ЦППО и ΠΠΠ1 задана в пределах от 0 до 100 нс. Зависимость среднеквадратической ошибки (СКО) оценки координат от погрешности координат ЦППО и опорного ΠΠΠ1 получены для четырех значений погрешности определения моментов прихода сигнала: 0 не, 25 нс, 50 нс и 100 нс. Для каждой погрешности определения момента прихода сигнала и погрешности в координатах ЦППО и ППП1 выполнено 10 тысяч испытаний. Соответствующие зависимости приведены на фиг. 11 и 12.
Выполнен анализ зависимости точности оценки координат ИРИ от погрешности определения местоположения ППП, результаты которого приведены на фиг. 14. Ошибки в определении координат ППП заданы в пределах от 0 до 20 м. Для каждой погрешности было проведено 10000 испытаний. Исходная расстановка ППП при моделировании приведена на фиг. 13.
Из фиг. 11-14 следует, что СКО оценки координат в 5 метров можно обеспечить при погрешности определения координат ЦППО и опорного ППП1 менее 5 метров и погрешности измерения временных параметров сигнала менее 25 нс.
При погрешностях определения координат ЦППО и ППП1 1 метр и определения момента прихода сигнала 25 нс. (реализация этих требований подтверждена практическими испытаниями) значение СКО оценки координат ИРИ составляет 2-3 метра.
Результаты моделирования и практические испытания позволяют сделать вывод о том, что предлагаемый способ определения координат ИРИ при погрешностях определения координат ЦППО и ΠΠΠ1 менее 22 м и измерении временных параметров сигнала с погрешностью менее 25 нc дает погрешность в определении координат ППП менее 18 м. Данная величина меньше погрешности, получаемой при использовании сигналов ГНСС GPS (см. Электронный ресурс https://ru.wikipedia.org/wiki/GPS). Повышение точности определения координат ППП в предлагаемом способе влечет за собой повышение точности определения местоположения ИРИ.
Таким образом, предлагаемый способ с минимальными издержками (два передатчика контрольных сигналов) одновременно позволяет определять местоположение объектов навигации в виде ЦППО и K ППП (реализуют локальную систему навигации) и определение координат заданных ИРИ в условиях отсутствия доступности сигналов ГНСС. При этом получаемый выигрыш η по оперативности (скорости развертывания и перемещениям элементов измерителя) зависит от количества ППП и составляет η≥2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Разностно-дальномерный способ определения координат источника радиоизлучения и устройство для его реализации | 2019 |
|
RU2719770C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения (варианты) и устройство для их реализации | 2020 |
|
RU2740640C1 |
| Разностно-дальномерный способ определения местоположения объектов | 2022 |
|
RU2790347C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения | 2019 |
|
RU2717231C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения и устройство для его реализации | 2019 |
|
RU2704793C1 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы и устройство для его реализации | 2023 |
|
RU2826616C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2539968C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2014 |
|
RU2568104C1 |
| Способ определения координат источника радиоизлучения в трехмерном пространстве динамической системой радиоконтроля | 2019 |
|
RU2715422C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЗАИМНОЙ ЗАДЕРЖКИ MSK СИГНАЛОВ ПАКЕТНЫХ РАДИОСЕТЕЙ В РАЗНОСТНО-ДАЛЬНОМЕРНОЙ СИСТЕМЕ МЕСТООПРЕДЕЛЕНИЯ | 2016 |
|
RU2623094C1 |









Изобретение относится к радиотехнике и может быть использовано в многопозиционных радиотехнических системах для определения координат заданного источника радиоизлучения (ИРИ) с кодовым и временным разделением каналов. Технический результат - повышение оперативности при развертывании измерителя и его перемещениях в условиях отсутствия доступности сигналов глобальной навигационной спутниковой системы (ГНСС). В заявленном способе осуществляют определение на подготовительном этапе местоположения только центрального пункта приема и обработки (ЦППО) и опорного периферийного пункта приема (ППП) ППП1 в ручном режиме. В состав каждого ЦППО и ППП1 дополнительно вводят по передатчику, используемому для излучения контрольных сигналов. Определяют расстояние dЦППО,k от ЦППО до всех K ППП, k=1, 2, …, K, путем излучения передатчиком ЦППО контрольных сигналов в направлении каждого ППП и приеме от них ретранслированного сигнала с последующим определением их задержки Tk, dЦППО,k=Tk⋅с, где с - скорость света. Аналогично определяют расстояние d1,k от опорного ППП1 до K - 1 ППП, k=2, 3, …, K, а измерение задержки сигнала  и значения d1,k осуществляют на ЦППО. На основе теоремы косинусов определяют углы в формируемых треугольниках: ЦППО – ППП1 - ПППk, определяют координаты k-го ПППk (х,у)k в локальной системе координат. 14 ил.
и значения d1,k осуществляют на ЦППО. На основе теоремы косинусов определяют углы в формируемых треугольниках: ЦППО – ППП1 - ПППk, определяют координаты k-го ПППk (х,у)k в локальной системе координат. 14 ил.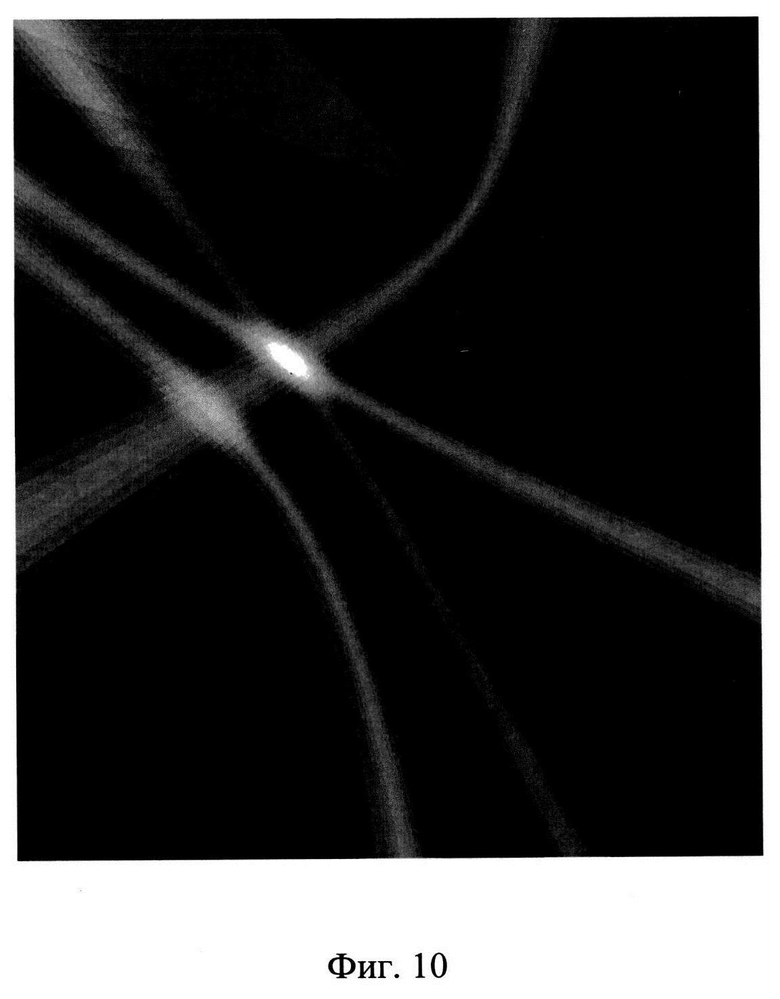
Разностно-дальномерный способ определения координат источника радиоизлучения (ИРИ), основанный на приеме сигналов пространственно разнесенными периферийными пунктами приема (ППП), связанными с центральным пунктом приема и обработки (ЦППО) командными линиями связи и линиями аналоговой ретрансляции сигнала, причем командными линиями связи с ЦППО на ППП передают команды настройки на частоту сигнала ИРИ, а по линиям аналоговой ретрансляции принятые в ППП сигналы ИРИ передают на ЦППО, где измеряют разность времени приема этих сигналов в ППП и ЦППО τk, где k ∈ 1, 2, …, K - номера ППП и измерительных баз ЦППО - ПППk, при этом на подготовительном этапе на ЦППО в прямоугольном виде задают контролируемый район (КР), границы которого по осям 0х и 0у обозначают через А и В соответственно, КР делят на элементарные участки со сторонами а и b по осям 0х и 0у соответственно, площадь которых выбирают исходя из заданной точности Δd определения координат ИРИ, определяют координаты центров элементарных участков (Xi, Yj), на основе которых формируют матрицу координат N размерности A'×В', где Xi=ai, i=1, 2, …, А/а=А', Yj=bj, j=1, 2, …, B/b=В', для каждого элемента (Xi,Yj) матрицы координат N всех K измерительных баз определяют эталонные значения разности времени прихода сигнала на ЦППО и ΠΠΠk τi,j,k, формируют K эталонных матриц Мk, k=1, 2, …, K, элементами каждой из которых является соответствующее координатам (Хi, Yj) эталонное значение разности задержки прихода сигналов τi,j,k для k-й измерительной базы ЦППО - ПППk, а в процессе работы для учета разности времени приема сигнала вычисляют взаимнокорреляционную функцию (ВКФ) сигналов Rk[τ], принятых на k-м ППП, k=1, 2, …, K, и на ЦППО, для значений временного сдвига в интервале τ ∈ (-c-1dk, c-1dk), где dk - расстояние между ЦППО и k-м ППП, с заданным шагом Δτ, соответствующим частоте дискретизации сигнала, на основе K эталонных матриц Mk формируют корреляционные матрицы Фk путем замены элементов задержки τi,j,k на соответствующие им измеренные значения ВКФ Rk[τi,j], значения матриц Фk, k=1, 2, …, K, суммируют по всем K измерительным базам  а за наиболее вероятное расположение ИРИ принимают координаты точки [Χi, Yj), соответствующей максимальному значению элемента матрицы
а за наиболее вероятное расположение ИРИ принимают координаты точки [Χi, Yj), соответствующей максимальному значению элемента матрицы  отличающийся тем, что на подготовительном этапе в условиях отсутствия доступности сигналов глобальной навигационной спутниковой системы определяют координаты местоположения лишь ЦППО и опорного ППП1 в ручном режиме посредством измерения удаления и угла отклонения ЦППО и опорного ППП1 от точки или объекта с известными координатами, а в качестве ППП1 используют один из K ППП, в состав ЦППО и ППП1 дополнительно вводят по передатчику, которые предназначены для излучения контрольных сигналов, определяют расстояние dЦППО,k от ЦППО до всех K ППП путем излучения ЦППО контрольных сигналов в направлении каждого ППП и приеме от них ретранслированного сигнала с последующим определением их задержки Тk,
отличающийся тем, что на подготовительном этапе в условиях отсутствия доступности сигналов глобальной навигационной спутниковой системы определяют координаты местоположения лишь ЦППО и опорного ППП1 в ручном режиме посредством измерения удаления и угла отклонения ЦППО и опорного ППП1 от точки или объекта с известными координатами, а в качестве ППП1 используют один из K ППП, в состав ЦППО и ППП1 дополнительно вводят по передатчику, которые предназначены для излучения контрольных сигналов, определяют расстояние dЦППО,k от ЦППО до всех K ППП путем излучения ЦППО контрольных сигналов в направлении каждого ППП и приеме от них ретранслированного сигнала с последующим определением их задержки Тk,  где с - скорость света, tk - внутренняя задержка сигнала в k-м ППП, на ЦППО определяют расстояние d1,k между опорным ППП1 и остальными K - 1 ППП путем измерения задержки
где с - скорость света, tk - внутренняя задержка сигнала в k-м ППП, на ЦППО определяют расстояние d1,k между опорным ППП1 и остальными K - 1 ППП путем измерения задержки  на трассе ППП1 - ПППk, k=2, 3, …, K, на основе излучения передатчиком ППП1 контрольного сигнала в направлении ПППk, приеме на ППП1 от него ретранслированного сигнала с последующей передачей его на ЦППО,
на трассе ППП1 - ПППk, k=2, 3, …, K, на основе излучения передатчиком ППП1 контрольного сигнала в направлении ПППk, приеме на ППП1 от него ретранслированного сигнала с последующей передачей его на ЦППО,  на основе теоремы косинусов определяют углы в формируемых треугольниках ЦППО - ППП1 - ПППk на основе расстояний между ЦППО, опорным ΠΠΠ1 и искомым ППП, определяют координаты k-то ППП (х, у)k на основе полученных расстояний и углов с использованием координат ЦППО (х, y)ЦППО и опорного ППП1 (х, у)1.
на основе теоремы косинусов определяют углы в формируемых треугольниках ЦППО - ППП1 - ПППk на основе расстояний между ЦППО, опорным ΠΠΠ1 и искомым ППП, определяют координаты k-то ППП (х, у)k на основе полученных расстояний и углов с использованием координат ЦППО (х, y)ЦППО и опорного ППП1 (х, у)1.
| Разностно-дальномерный способ определения координат источника радиоизлучения и устройство для его реализации | 2019 |
|
RU2719770C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения | 2019 |
|
RU2717231C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2539968C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПО ИЗМЕРЕННЫМ ОТНОСИТЕЛЬНЫМ ДАЛЬНОСТЯМ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2019 |
|
RU2718618C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2263328C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2014 |
|
RU2568104C1 |
| EP 3128337 A1, 08.02.2017 | |||
| CN 106842118 A, 13.06.2017 | |||
| CN 109031261 A, 18.12.2018 | |||
| US 5099456 A, 24.03.1992. | |||

