Группа изобретений относится к радиотехнике и может быть использована в многопозиционных радиотехнических системах для определения координат (ОК) заданных источников радиоизлучения (ИРИ) с кодовым или временным разделением каналов.
Известен способ измерения взаимной задержки MSK сигналов пакетных радиосетей в разностно-дальномерной системе местоопределения (см. Пат. РФ №2623094, МПК G01S 5/06, опубл. 22.06.2017, бюл. №18). Способ предполагает прием периферийными пунктами приема (ППП) разностно-дальномерной системы местоопределения (РДСМО) сигналов пакетных радиосетей, измерение времени прихода сигналов относительно единой шкалы времени, передачу по линии связи измеренных значений на центральный пункт приема и обработки (ЦППО), где вычисляют взаимные задержки сигналов τi,n, причем модуль взаимно корреляционной функции (ВКФ) R(τ) вычисляют с помощью парциальных ВКФ, чем достигается повышение точности измерения τi,n.
Однако аналогу присущи недостатки, ограничивающие его применение. Основным из них является недостаточная точность ОК ИРИ. Кроме того, ему присуща сложность при реализации ППП. Способ предусматривает использование на всех ППП системы единого времени при измерении задержки сигналов. Отсутствие привязки измеренных значений задержки сигнала на ППП к заданному источнику радиоизлучения при оценке их координат в условиях, когда работа нескольких ИРИ осуществляется на одной частоте (ИРИ с временным или кодовым разделением) приводит к ошибкам оценки координат ИРИ.
Известны Пат. РФ №№2258242, 2309420, 2521084 и др., эффективность применения которых резко падает при оценке координат ИРИ с временным или кодовым разделением каналов. В зависимости от длительности оценки задержек сигналов τi,n возникают ошибки ОК различной природы.
Известен разностно-дальномерный способ определения координат источника радиоизлучения (см. Пат. №2539968, МПК G01S 3/46, опубл. 27.01.2015, бюл. №3).
Способ-аналог заключается в приеме сигналов ИРИ разнесенными в пространстве периферийными пунктами приема, связанными с ЦППО командными линиями связи и линиями аналоговой ретрансляции сигналов, причем по командным линиям связи с ЦППО на ППП передают команды настройки на частоту сигнала ИРИ, а по линиям аналоговой ретрансляции принятые в ППП сигналы ИРИ передают на ЦППО, где измеряют разности времени приема сигналов в ППП и ЦППО τi,n, i и n - номера ЦППО и ППП соответственно, при этом задержки τi,n определяют как аргумент максимизации модуля взаимнокорреляционной функции, а на их основе вычисление координат ИРИ.
Аналог обеспечивает уменьшение количества вычислений при оценке временных задержек, принимаемых на ППП сигналов ИРИ в реализуемой ЦППО процедуре. Кроме того, выполнение ППП максимально упрощено, что способствует широкому применению способа-прототипа в РДСМО. Каждый ППП представляет собой совокупность устройств, выделяющих радиосигналы ИРИ на фоне помех, а также устройств, организующих аналоговые линии ретрансляции.
Однако аналогу присущ недостаток, ограничивающий его применение: недостаточная точность определения координат ИРИ, а в ряде случаев он теряет работоспособность. Причиной ошибок ОК прежде всего является многолучевость распространения радиоволн. В результате последние приходят на измеритель с разных направлений и с разной задержкой. Ошибочное определение координат возникает и в тех случаях, когда на частоте искомого ИРИ работают несколько корреспондентов (ИРИ) с временным или кодовым разделением каналов, например, сети Wi-Fi, GSM 2G, UMTS и др.
Если временной интервал накопления сигнала в ЦППО окажется много больше, чем интервал передачи данных в используемом стандарте связи (при временном разделении), в накапливаемом сигнале будут присутствовать излучения обеих ИРИ. Это приведет к ошибкам вычисления ВКФ и как следствие - к погрешностям измерения задержек сигнала τi,n. Последнее приводит к ошибкам определения местоположения ИРИ. Если мощность сигнала второго ИРИ на входе приемных трактов ППП окажется выше мощности сигнала искомого ИРИ, в ЦППО будут определены с погрешностями координаты второго ИРИ. Следовательно, это приведет к ошибочному определению местоположения второго ИРИ вместо искомого. При возникновении ситуации, когда мощность сигнала второго ИРИ окажется выше на части ППП, то результаты определения координат непредсказуемы.
Ошибки измерений координат возможны и в ситуации, когда временной интервал накопления сигнала сопоставим с временем передачи данных в используемом стандарте связи. Они возникают при несогласованности начала интервалов накопления сигнала и передачи данных. Координаты искомого ИРИ будут также неправильно определены и в ситуации с согласованными интервалами «накопление - передача», но при работе второго ИРИ.
Наиболее близким по технической сущности и заявленным способам является разностно-дальномерный способ определения координат источника радиоизлучения (см. Патент РФ №2704793, МПК G01S 5/12 (2019.05), опубл. 31.10.2019, бюл. №31).
Способ-прототип заключается в приеме сигналов пространственно разнесенными периферийными пунктами приема с известными координатами, связанными с центральным пунктом приема и обработки командными линиями связи и линиями аналоговой ретрансляции сигнала, причем командными линиями связи с ЦППО на ППП передают команды настройки на частоту сигнала ИРИ, а по линиям аналоговой ретрансляции принятые в ППП сигналы ИРИ передают на ЦППО, одновременном запоминании на ЦППО на интервале времени Δt сигналов ИРИ, принятых в ЦППО и во всех n ППП, демодуляции принятых в ЦППО сигналов ИРИ, поиске на основе анализа полученного битового массива данных и анализе преамбулы и заголовка PLCP текущего фрейма, определении начала МАС-фрейма, его длительности Δtфj и адреса пользователя Aj, j=1, 2, …, J, сравнении полученного адреса с заданным для поиска, при их совпадении на интервале времени от начала преамбулы PLCP до конца j-го МАС-фрейма измерении разности времени приема ретранслированных сигналов τi,k в ЦППО и ППП, в противном случае после завершения текущего j-го МАС-фрейма анализе преамбулы и заголовка очередного МАС-фрейма с целью поиска фрейма заданного пользователя, измерении разности времени приема сигналов в ППП и ЦППО τi,k как аргумента максимизации модуля взаимнокорреляционной функции, где i, k ∈ 0, 1, …. N - номера ЦППО и ППП соответственно, на основе которых определяют координаты ИРИ.
Способ-прототип обеспечивает определение местоположения заданного источника радиоизлучения в условиях многолучевости и работы на одной частоте нескольких ИРИ с временным или кодовым разделением каналов.
Однако прототипу присущи недостаток, ограничивающий его применение.
С развитием современных технологий, как военной, так и в гражданской сферах все чаще находят применение беспилотные летательные аппараты (БЛА) и радиоуправляемые авиамодели (РУАМ) для выполнения различных задач. Поэтому актуальной является задача определения местоположения БЛА и РУАМ по излучениям ИРИ, расположенных на их борту. Если в расчетах не учитывать информацию о высоте ИРИ, определенные координаты по широте и долготе не будут соответствовать действительности. В разностно-дальномерном способе определения местоположения ИРИ координаты определяются пересечением гиперболоидов вращения и линии, образуемые их горизонтальными срезами на разной высоте. Последние будут пересекаться в разных местах по долготе и широте. Из этого следует вывод о том, что необходимо проводить расчеты для всего объема пространства, для получения координат ИРИ с наименьшими погрешностями.
Это влечет за собой большой объем вычислений, связанный в свою очередь со значительными временными затратами. Многие известные способы (см. Пат. РФ №№2296341, 2327186 и др.) предполагают деление контролируемого пространства на многочисленные элементарные объемы и последующий в их рамках анализ, что приводит к большим как временным, так и вычислительным затратам.
Целью заявляемых технических решений является разработка разностно-дальномерных способов определения координат ИРИ в пространстве, обеспечивающих сокращение временных затрат на определение местоположения заданного источника радиоизлучения при сохранении точностных характеристик в условиях многолучевости и работы на одной частоте нескольких ИРИ с временным или кодовым разделением каналов.
Поставленная цель в первом предлагаемом способе достигается тем, что разностно-дальномерный способ определения координат источника радиоизлучения, основанный на приеме сигналов пространственно разнесенными периферийными пунктами приема с известными координатами, связанными с центральным пунктом приема и обработки командными линиями связи и линиями аналоговой ретрансляции сигнала, причем командными линиями связи с ЦППО на ППП передают команды настройки на частоту сигнала ИРИ, а по линиям аналоговой ретрансляции принятые в ППП сигналы ИРИ передают на ЦППО, одновременном запоминании на ЦППО сигналов ИРИ, принятых в ЦППО и во всех NППП на интервале Δt, демодуляции принятых в ЦППО сигналов ИРИ, поиске и анализе преамбулы и заголовка PLCP текущего фрейма на основе анализа полученного битового массива данных, определении начала МАС-фрейма, его длительности Δtϕj и адреса пользователя, сравнении полученного адреса с заданным для поиска, а при их совпадении в измерении разности времени приема ретранслированных сигналов τn в ЦППО и ППП на интервале времени от начала преамбулы PLCP до конца соответствующего МАС-фрейма, где n ∈ 1, 2, …, N - номера ППП и измерительных баз ЦППО - ПППn, определении на их основе координат ИРИ, на ЦППО на подготовительном этапе в виде прямоугольного параллелепипеда задают контролируемый район (КР) и вводят систему координат с началом в одной из его вершин, с осями 0х, 0у и 0z направленными вдоль граней, примыкающих к выбранной вершине, которые обозначают через А, В и С соответственно, КР делят на исходные элементарные объемы со сторонами а, b и с по осям 0х, 0у и 0z соответственно, объем которых выбирают исходя из заданных временных затрат и точности Δd определения координат ИРИ, определяют координаты центров исходных элементарных объемов (Xi, Yj, Zk), на основе которых формируют объемную матрицу координат Р размерности А'×В'×С, где Xi=ai, i=1, 2, …,  Yj=bj, j=1, 2, …,
Yj=bj, j=1, 2, …,  Zk=ck, k=1, 2, …,
Zk=ck, k=1, 2, …,  для каждого элемента (Xi, Yj, Zk) матрицы координат Р всех N измерительных баз определяют эталонные значения разности времени прихода сигнала на ЦППО и ПППn, τi,j,k,n, формируют N эталонных матриц Mn, n=1, 2, …, N, элементами каждой из которых являются соответствующее координатам (Xi, Yj, Zk) эталонные значения задержки прихода сигналов τi,j,k,n для n-й измерительной базы ЦППО - ПППn, а в процессе работы для учета разности времени приема сигнала вычисляют взаимно-корреляционную функцию сигналов Rn[τ], принятых на n-м ППП, n=1, 2, …, N, и на ЦППО, для значений временного сдвига в интервале
для каждого элемента (Xi, Yj, Zk) матрицы координат Р всех N измерительных баз определяют эталонные значения разности времени прихода сигнала на ЦППО и ПППn, τi,j,k,n, формируют N эталонных матриц Mn, n=1, 2, …, N, элементами каждой из которых являются соответствующее координатам (Xi, Yj, Zk) эталонные значения задержки прихода сигналов τi,j,k,n для n-й измерительной базы ЦППО - ПППn, а в процессе работы для учета разности времени приема сигнала вычисляют взаимно-корреляционную функцию сигналов Rn[τ], принятых на n-м ППП, n=1, 2, …, N, и на ЦППО, для значений временного сдвига в интервале  где с* - скорость света, dn - расстояние между ЦППО и n-м ППП, с заданным шагом Δτ, соответствующим частоте дискретизации сигнала, и их среднее значение
где с* - скорость света, dn - расстояние между ЦППО и n-м ППП, с заданным шагом Δτ, соответствующим частоте дискретизации сигнала, и их среднее значение  для каждого исходного элементарного объема контролируемого района на интервале времени
для каждого исходного элементарного объема контролируемого района на интервале времени  где s - время прохождения радио-волны по диагонали исходного элементарного объема, на основе N эталонных матриц Mn формируют корреляционные матрицы Фn путем замены значений задержки τi,j,k,n на соответствующие им измеренные средние значения ВКФ
где s - время прохождения радио-волны по диагонали исходного элементарного объема, на основе N эталонных матриц Mn формируют корреляционные матрицы Фn путем замены значений задержки τi,j,k,n на соответствующие им измеренные средние значения ВКФ  значения матриц Фn, n=1, 2, …, N, суммируют по всем N измерительным базам
значения матриц Фn, n=1, 2, …, N, суммируют по всем N измерительным базам  за предварительное местоположение ИРИ принимают координаты точки (Xi, Yj, Zk), соответствующей максимальному значению элемента матрицы измерений
за предварительное местоположение ИРИ принимают координаты точки (Xi, Yj, Zk), соответствующей максимальному значению элемента матрицы измерений  задают уточненный контролируемый район в виде прямоугольного параллелепипеда с границами, соответствующими границам выбранного исходного элементарного объема со сторонами а, b и с и центром с координатами (Xi, Yj, Zk), делят уточненный контролируемый район на элементарные объемы со сторонами, а', b' и с', а' << а, b' << b, с' << с, определяют координаты центров элементарных объемов
задают уточненный контролируемый район в виде прямоугольного параллелепипеда с границами, соответствующими границам выбранного исходного элементарного объема со сторонами а, b и с и центром с координатами (Xi, Yj, Zk), делят уточненный контролируемый район на элементарные объемы со сторонами, а', b' и с', а' << а, b' << b, с' << с, определяют координаты центров элементарных объемов  на основе которых формируют объемную матрицу уточненных координат Р' размерности А"×В"×С", где
на основе которых формируют объемную матрицу уточненных координат Р' размерности А"×В"×С", где 

 для каждого элемента
для каждого элемента  уточненной корреляционной матрицы координат Р' всех N измерительных баз определяют эталонные значения разности времени прихода сигналов на ЦППО и ПППn
уточненной корреляционной матрицы координат Р' всех N измерительных баз определяют эталонные значения разности времени прихода сигналов на ЦППО и ПППn  формируют N уточненных эталонных матриц
формируют N уточненных эталонных матриц  элементами каждой из которых являются соответствующие координатам
элементами каждой из которых являются соответствующие координатам  эталонные значения разности задержки прихода сигналов
эталонные значения разности задержки прихода сигналов  вычисляют средние значения ВКФ
вычисляют средние значения ВКФ  для каждого элементарного объема уточненного контролируемого района на интервале времени
для каждого элементарного объема уточненного контролируемого района на интервале времени  где s' - время, за которое радиоволна проходит расстояние, равное длине диагонали элементарного объема уточненного контролируемого района, формируют N уточненных корреляционных матриц
где s' - время, за которое радиоволна проходит расстояние, равное длине диагонали элементарного объема уточненного контролируемого района, формируют N уточненных корреляционных матриц  путем замены значений задержки
путем замены значений задержки  на соответствующие средние значения ВКФ
на соответствующие средние значения ВКФ  значения матриц
значения матриц  суммируют по всем N измерительным базам, а за наиболее вероятное местоположение ИРИ принимают координаты точки
суммируют по всем N измерительным базам, а за наиболее вероятное местоположение ИРИ принимают координаты точки  соответствующей максимальному значению элемента уточненной матрицы измерений
соответствующей максимальному значению элемента уточненной матрицы измерений  сравнивают размеры половины длины диагонали элементарного объема уточненного контролируемого района
сравнивают размеры половины длины диагонали элементарного объема уточненного контролируемого района  с заданной точностью определения координат Δd, при выполнении неравенства
с заданной точностью определения координат Δd, при выполнении неравенства  обнаруженному ИРИ присваивают координаты
обнаруженному ИРИ присваивают координаты  в противном случае начинают новый цикл уточнения координат ИРИ.
в противном случае начинают новый цикл уточнения координат ИРИ.
Кроме того, поставленная цель во втором предлагаемом способе достигается тем, что разностно-дальномерный способ определения координат источника радиоизлучения, основанный на приеме сигналов пространственно разнесенными периферийными пунктами приема с известными координатами, связанными с центральным пунктом приема и обработки командными линиями связи и линиями аналоговой ретрансляции сигнала, причем командными линиями связи с ЦППО на ППП передают команды настройки на частоту сигнала ИРИ, а по линиям аналоговой ретрансляции принятые в ППП сигналы ИРИ передают на ЦППО, одновременном запоминании на ЦППО сигналов ИРИ, принятых в ЦППО и во всех NППП на интервале Δt, демодуляции принятых в ЦППО сигналов ИРИ, поиске и анализе преамбулы и заголовка PLCP текущего фрейма на основе анализа полученного битового массива данных, определении начала МАС-фрейма, его длительности Δtϕj и адреса пользователя, сравнении полученного адреса с заданным для поиска, а при их совпадении в измерении разности времени приема ретранслированных сигналов τn в ЦППО и ППП на интервале времени от начала преамбулы PLCP до конца соответствующего МАС-фрейма, где n ∈ 1, 2, …, N - номера ППП и измерительных баз ЦППО - ПППn, определении на их основе координат ИРИ, на ЦППО на подготовительном этапе в виде прямоугольного параллелепипеда задают контролируемый район и вводят систему координат с началом в одной из его вершин, с осями 0х, 0у и 0z, направленными вдоль граней, примыкающих к выбранной вершине, которые обозначают через А, В и С соответственно, КР делят на исходные элементарные объемы со сторонами а, b и с по осям 0х, 0у и 0z соответственно, объем которых выбирают исходя из заданных временных затрат и точности Δd определения координат ИРИ, определяют координаты центров исходных элементарных объемов (Xi, Yj, Zk), на основе которых формируют объемную матрицу координат Р размерности А'×В'×С', где Xi=ai, i=1, 2, …,  Yj=bj, j=1, 2, …,
Yj=bj, j=1, 2, …,  Zk=ck, k=1, 2, …,
Zk=ck, k=1, 2, …,  для каждого элемента (Xi, Yj, Zk) матрицы координат Р всех N измерительных баз определяют эталонные значения разности времени прихода сигнала на ЦППО и ПППn τi,j,k,n, формируют N эталонных матриц Mn, n=1, 2, …, N, элементами каждой из которых являются соответствующее координатам (Xi, Yj, Zk) эталонные значения задержки прихода сигналов τi,j,k,n для n-й измерительной базы ЦППО - ПППn, в каждом исходном элементарном объеме задают А"×В"×С" равных по размерам уточненных элементарных объемов путем их деления на прямоугольные параллелепипеды со сторонами а', b' и с', а' << а, b' << b, с' << с, определяют координаты центров уточненных элементарных объемов
для каждого элемента (Xi, Yj, Zk) матрицы координат Р всех N измерительных баз определяют эталонные значения разности времени прихода сигнала на ЦППО и ПППn τi,j,k,n, формируют N эталонных матриц Mn, n=1, 2, …, N, элементами каждой из которых являются соответствующее координатам (Xi, Yj, Zk) эталонные значения задержки прихода сигналов τi,j,k,n для n-й измерительной базы ЦППО - ПППn, в каждом исходном элементарном объеме задают А"×В"×С" равных по размерам уточненных элементарных объемов путем их деления на прямоугольные параллелепипеды со сторонами а', b' и с', а' << а, b' << b, с' << с, определяют координаты центров уточненных элементарных объемов  на основе которых формируют А'×В'×С'=Н объемных матриц координат
на основе которых формируют А'×В'×С'=Н объемных матриц координат  h=1, 2, …, Н, размерности А"×В"×С", где
h=1, 2, …, Н, размерности А"×В"×С", где 

 для каждого элемента
для каждого элемента  уточненных матриц координат
уточненных матриц координат  h=1, 2, …, H, и всех N измерительных баз определяют эталонные значения разности времени прихода сигналов на ЦППО и ПППn
h=1, 2, …, H, и всех N измерительных баз определяют эталонные значения разности времени прихода сигналов на ЦППО и ПППn  формируют N×Н уточненных эталонных матриц
формируют N×Н уточненных эталонных матриц  элементами каждой из которых являются соответствующие координатам
элементами каждой из которых являются соответствующие координатам  эталонные значения задержки прихода сигнала
эталонные значения задержки прихода сигнала  для n-й измерительной базы, сравнивают размеры половины длины диагонали элементарного объема уточненного контролируемого района
для n-й измерительной базы, сравнивают размеры половины длины диагонали элементарного объема уточненного контролируемого района  с заданной точностью определения координат Δd, при выполнении неравенства
с заданной точностью определения координат Δd, при выполнении неравенства  завершают подготовительный этап, в противном случае начинают новый цикл детализации каждого уточненного контролируемого района и формирования соответствующих дополнительных эталонных матриц
завершают подготовительный этап, в противном случае начинают новый цикл детализации каждого уточненного контролируемого района и формирования соответствующих дополнительных эталонных матриц  а в процессе работы для измерения разности времени приема сигналов вычисляют взаимнокорреляционную функцию сигналов Rn[τ], принятых на n-м ППП, n=1, 2, …, N, и на ЦППО, для значений временного сдвига в интервале
а в процессе работы для измерения разности времени приема сигналов вычисляют взаимнокорреляционную функцию сигналов Rn[τ], принятых на n-м ППП, n=1, 2, …, N, и на ЦППО, для значений временного сдвига в интервале  где с* - скорость света, dn - расстояние между ЦППО и n-м ППП, с заданным шагом Δτ, соответствующим частоте дискретизации сигнала, и их среднее значение
где с* - скорость света, dn - расстояние между ЦППО и n-м ППП, с заданным шагом Δτ, соответствующим частоте дискретизации сигнала, и их среднее значение  для каждого исходного элементарного объема контролируемого района на интервале времени
для каждого исходного элементарного объема контролируемого района на интервале времени  где s - время, за которое радиоволна проходит расстояние, равное диагонали исходного элементарного объема, на основе N эталонных матриц Mn формируют корреляционные матрицы Фn путем замены значений задержки τi,j,k,n на соответствующие им измеренные средние значения ВКФ
где s - время, за которое радиоволна проходит расстояние, равное диагонали исходного элементарного объема, на основе N эталонных матриц Mn формируют корреляционные матрицы Фn путем замены значений задержки τi,j,k,n на соответствующие им измеренные средние значения ВКФ  значения матриц Фn, n=1, 2, …, N, суммируют по всем N измерительным базам
значения матриц Фn, n=1, 2, …, N, суммируют по всем N измерительным базам  за предварительное местоположение ИРИ принимают координаты точки (Xi, Yj, Zk), соответствующей максимальному значению элемента матрицы измерений
за предварительное местоположение ИРИ принимают координаты точки (Xi, Yj, Zk), соответствующей максимальному значению элемента матрицы измерений  задают уточненный контролируемый район в виде прямоугольного параллелепипеда с границами, соответствующими границам выбранного исходного элементарного объема со сторонами а, b и с и центром с координатами (Xi, Yj, Zk), вычисляют средние значения ВКФ
задают уточненный контролируемый район в виде прямоугольного параллелепипеда с границами, соответствующими границам выбранного исходного элементарного объема со сторонами а, b и с и центром с координатами (Xi, Yj, Zk), вычисляют средние значения ВКФ  для каждого h-гo элементарного объема уточненного контролируемого района на интервале времени
для каждого h-гo элементарного объема уточненного контролируемого района на интервале времени  где s' - время, за которое радиоволна проходит расстояние, равное диагонали элементарного объема уточненного контролируемого района, формируют N уточненных корреляционных матриц
где s' - время, за которое радиоволна проходит расстояние, равное диагонали элементарного объема уточненного контролируемого района, формируют N уточненных корреляционных матриц  путем замены элементов задержки
путем замены элементов задержки  на соответствующие средние значения ВКФ
на соответствующие средние значения ВКФ  значения матриц
значения матриц  суммируют по всем N измерительным базам, а за уточненное местоположение ИРИ принимают координаты точки
суммируют по всем N измерительным базам, а за уточненное местоположение ИРИ принимают координаты точки  соответствующей максимальному значению элемента уточненной матрицы измерений в случае отсутствия дальнейшей детализации контролируемого района, выполненного на подготовительном этапе, уточненное значение координат точки
соответствующей максимальному значению элемента уточненной матрицы измерений в случае отсутствия дальнейшей детализации контролируемого района, выполненного на подготовительном этапе, уточненное значение координат точки  принимают за наиболее вероятные координаты обнаруженного ИРИ.
принимают за наиболее вероятные координаты обнаруженного ИРИ.
При этом среднее значение ВКФ  на интервале
на интервале  и, следовательно, соответствующее этой точке, определяют из выражения
и, следовательно, соответствующее этой точке, определяют из выражения

В свою очередь, время s, за которое радиоволна проходит расстояние, равное длине диагонали элементарного объема контролируемого района, равна

Благодаря новой совокупности существенных признаков за счет упорядоченной по критерию максимального среднего значения ВКФ  многоэтапной обработки результатов пространственных измерений в заявляемых способах обеспечивается уменьшение временных затрат на определение координат заданного ИРИ разностно-дальномерным способом при сохранении точностных характеристик в условиях работы нескольких ИРИ на одной частоте с временным или кодовым разделением каналов.
многоэтапной обработки результатов пространственных измерений в заявляемых способах обеспечивается уменьшение временных затрат на определение координат заданного ИРИ разностно-дальномерным способом при сохранении точностных характеристик в условиях работы нескольких ИРИ на одной частоте с временным или кодовым разделением каналов.
Выбор в качестве критерия значения  позволяющего повысить эффективность РДСМО, поясняется следующим образом. При выполнении измерений глобальный максимум ВКФ лишь в отдельных случаях может совпадать с центрами (координатами) элементарных объемов (ЭО) контролируемого района. В этих условиях использование значения ВКФ лишь в центре ЭО во многих случаях не отражает оцениваемые координаты ИРИ и приводит к ошибкам измерений. Кроме того, совпадения локальных максимумов ВКФ с центрами ЭО также могут привести к ошибкам измерения координат ИРИ. Поэтому целесообразным является использование среднего значения ВКФ в интервале времени s, соответствующем конкретному ЭО.
позволяющего повысить эффективность РДСМО, поясняется следующим образом. При выполнении измерений глобальный максимум ВКФ лишь в отдельных случаях может совпадать с центрами (координатами) элементарных объемов (ЭО) контролируемого района. В этих условиях использование значения ВКФ лишь в центре ЭО во многих случаях не отражает оцениваемые координаты ИРИ и приводит к ошибкам измерений. Кроме того, совпадения локальных максимумов ВКФ с центрами ЭО также могут привести к ошибкам измерения координат ИРИ. Поэтому целесообразным является использование среднего значения ВКФ в интервале времени s, соответствующем конкретному ЭО.
Известны устройства, реализующие разностно-дальномерный способ местоопределения ИРИ (см. Пат. РФ №2670142, 2363010, 2309420). Всем им присущ общий недостаток - эффективность (работоспособность) их применения падает при ОК ИРИ с кодовым или временным разделением каналов.
Известно устройство (см. Пат. РФ №2521084, G01S 3/46, опубл. 27.06.2014, бюл. №18, фиг. 1), реализующее РДСМО. Устройство-аналог содержит k периферийных пунктов приема и центральный пункт приема и обработки, причем каждый ППП состоит из последовательно соединенных тракта приема радиосигналов и тракта ретрансляции радиосигналов, а ЦППО содержит радиопередатчик, k+1 трактов приема радиосигналов и центральный пост обработки (ЦПО), k+1 входов которого соединены с выходами соответствующих трактов приема радиосигналов, а выход является выходной шиной ЦППО, первая входная шина которого является входом управления радиопередатчика и соединена с входами управления трактов приема радиосигналов ЦППО, предназначена для задания частоты настройки трактов приема радиосигналов.
Аналог обеспечивает повышение точности измерения координат ИРИ разностно-дальномерным способом за счет исключения процедуры ретрансляции сигналов с наихудшим отношением сигнал / шум.
Однако устройству присущ недостаток, ограничивающий его применение. Эффективность использования устройства (его точностные характеристики по определению координат заданного ИРИ) резко падает в условиях, когда на частоте искомого излучателя работает несколько корреспондентов с временным или кодовым разделением каналов.
Наиболее близким по технической сущности является устройство (см. Пат. РФ №2704793, МПК G01S 5/12 (2019.05), опубл. 31.10.2019, бюл. №31). Устройство-прототип выполнено содержащим k периферийных пунктов приема и центральный пункт приема и обработки, причем каждый ППП состоит из последовательно соединенных тракта приема радиосигналов и тракта ретрансляции радиосигналов, а ЦППО содержит радиопередатчик, предназначенный для реализации командной линии связи, k+1 трактов приема радиосигналов и центральный пост обработки из последовательно соединенных блока измерения задержки Δτi,k и блока вычисления координат, выход которого является выходом ЦПО и выходной шиной ЦППО, причем k+1 входы ЦПО соединены с выходами соответствующих трактов приема сигналов, первая входная шина которого является входом управления радиопередатчика и соединена с входами управления трактов приема радиосигналов ЦППО, предназначена для задания частоты настройки fн трактов приема радиосигналов, в центральный пост обработки введены k+1 аналогово-цифровых преобразователей, входы которых являются соответственно k+1-ми входами ЦПО, k+1 блоков памяти, группы информационных входов которых соединяют с выходами соответствующих аналого-цифровых преобразователей, группу из k+1 входов блока измерения задержки τi,k соединена с информационными выходами соответствующих k+1 блоков памяти, блок управления, предназначенный для задания длительности интервала анализа Δt и его начала t', и тракт анализа, предназначенный для определения начала очередного фрейма t*, его длительности Δtj, вида модуляции МАС-фрейма и его демодуляции, определения адреса текущего пользователя Aj, второй вход которого является вторым установочным входом ЦПО и третьей входной шиной ЦППО, предназначенной для задания адреса пользователя Aj, первый информационный вход тракта анализа соединен с выходом k+1-го аналого-цифрового преобразователя (АЦП), а выход объединен с первыми входами управления k+1 блоков памяти и вторым входом блока управления, первый вход которого является первым установочным входом ЦПО и второй входной шиной ЦППО, предназначенной для задания интервала анализа Δt и его начала t', а выход соединен со вторыми входами управления блоков памяти и третьим входом тракта анализа, четвертая входная шина ЦППО, предназначена для задания координат ППП и ЦППО {X, Y}k+1, соединена со вторым входом блока расчета координат ЦПО и является третьим установочным входом ЦПО, генератор тактовых импульсов, выход которого соединен с входами синхронизации k+1-го АЦП, блока управления, тракта анализа, блока измерения задержки Δτi,k и блока вычисления координат.
Устройство-прототип обеспечивает определение координат заданного ИРИ на плоскости на основе разностно-дальномерного способа в условиях одновременной работы на одной частоте нескольких корреспондентов с временным или кодовым разделением каналов.
Однако устройству присущ недостаток, ограничивающий его применение. Прототип обеспечивает недостаточную точность определения местоположения ИРИ. Повышение точностных характеристик может быть достигнуто путем измерения координат ИРИ в объеме и увеличения детализации контролируемого района, следовательно, за счет увеличения временных затрат.
Целью заявляемого технического решения является разработка устройства определения координат ИРИ на основе разностно-дальномерного способа, обеспечивающего сокращение временных затрат на определение местоположение заданного источника радиоизлучения при сохранении точностных характеристик в условиях одновременной работы на одной частоте нескольких ИРИ с временным или кодовым разделением каналов.
Поставленная цель достигается тем, что в устройстве определения координат источника радиоизлучения разностно-дальномерным способом, содержащем N периферийных пунктов приема и центральный пункт приема и обработки, причем каждый ППП состоит из последовательно соединенных тракта приема радиосигналов и тракта ретрансляции радиосигналов, а ЦППО содержит радиопередатчик, предназначенный для реализации командной линии связи, N+1 трактов приема радиосигналов и центральный пост обработки, выход которого является выходной шиной ЦППО, причем N+1 информационных входов ЦПО соединены с выходами соответствующих трактов приема сигналов, первая входная шина ЦППО является входом управления радиопередатчиком и соединена с входами управления трактов приема радиосигналов ЦППО, предназначена для задания частоты настройки fн трактов приема радиосигналов, а центральный пост обработки выполнен содержащим N+1 аналогово-цифровых преобразователей, входы которых являются соответственно N+1 информационными входами ЦПО, N+1 блоков памяти, группы информационных входов которых соединены с выходами соответствующих аналого-цифровых преобразователей, блок управления, предназначенный для задания в процессе работы длительности интервала анализа Δt и его начала t', тракт анализа, предназначенный для определения начала очередного фрейма t*, его длительности Δtp, вида модуляции МАС-фрейма и его демодуляции, определения адреса текущего пользователя F, второй вход которого является вторым установочным входом ЦПО и третьей входной шиной ЦППО, предназначенной для задания адреса пользователя  , первый информационный вход тракта анализа соединен с выходом N+1-го аналого-цифрового преобразователя, а выход объединен с первыми входами управления N+1 блоков памяти и вторым входом блока управления, первый вход которого является первым установочным входом ЦПО и второй входной шиной ЦППО, предназначенной для задания интервала анализа Δt и его начала t', а выход соединен со вторыми входами управления блоков памяти и третьим входом тракта анализа, генератор тактовых импульсов, выход которого соединен с входами синхронизации N+1 аналого-цифровых преобразователей, блока управления и тракта анализа, в ЦПО введены первый вычислитель, предназначенный для нахождения взаимнокорреляционной функции сигналов Rn[τ], принятых на n-м ППП, n=1, 2, …, N, и на ЦППО, для значений временного сдвига в интервале
, первый информационный вход тракта анализа соединен с выходом N+1-го аналого-цифрового преобразователя, а выход объединен с первыми входами управления N+1 блоков памяти и вторым входом блока управления, первый вход которого является первым установочным входом ЦПО и второй входной шиной ЦППО, предназначенной для задания интервала анализа Δt и его начала t', а выход соединен со вторыми входами управления блоков памяти и третьим входом тракта анализа, генератор тактовых импульсов, выход которого соединен с входами синхронизации N+1 аналого-цифровых преобразователей, блока управления и тракта анализа, в ЦПО введены первый вычислитель, предназначенный для нахождения взаимнокорреляционной функции сигналов Rn[τ], принятых на n-м ППП, n=1, 2, …, N, и на ЦППО, для значений временного сдвига в интервале  где с* - скорость света, dn - расстояние между ЦППО и n-м ППП, с заданным шагом Δτ, группа из N+1 входов первого вычислителя соединена с информационными выходами соответствующих N+1 блоков памяти, второй вычислитель, предназначенный для нахождения среднего значения ВКФ
где с* - скорость света, dn - расстояние между ЦППО и n-м ППП, с заданным шагом Δτ, группа из N+1 входов первого вычислителя соединена с информационными выходами соответствующих N+1 блоков памяти, второй вычислитель, предназначенный для нахождения среднего значения ВКФ  первый информационный вход которого соединен с информационным выходом первого вычислителя, четвертая входная шина ЦППО, предназначена для задания координат ППП (X, Y, Z)n ЦППО {X, Y, Z}4, соединена с N+2 входом первого вычислителя и является третьим установочным входом ЦПО, последовательно соединенные блок формирования матрицы координат Р, предназначенный для определения координат центров исходных элементарных объемов (Xi, Yj, Zk) контролируемого района и формирования на их основе матрицы координат Р, блок формирования эталонных матриц Мn, предназначенный для вычислений задержек прихода сигнала τl,j,k,n для n-й измерительной базы ЦППО-ПППn, n=1, 2, …, N, соответствующей каждой координате (Xi, Yj, Zk), и формирования на их основе N эталонных матриц Мn, блок формирования корреляционных матриц Фn, предназначенный для формирования N корреляционных матриц Фn, элементами которых являются средние значения ВКФ
первый информационный вход которого соединен с информационным выходом первого вычислителя, четвертая входная шина ЦППО, предназначена для задания координат ППП (X, Y, Z)n ЦППО {X, Y, Z}4, соединена с N+2 входом первого вычислителя и является третьим установочным входом ЦПО, последовательно соединенные блок формирования матрицы координат Р, предназначенный для определения координат центров исходных элементарных объемов (Xi, Yj, Zk) контролируемого района и формирования на их основе матрицы координат Р, блок формирования эталонных матриц Мn, предназначенный для вычислений задержек прихода сигнала τl,j,k,n для n-й измерительной базы ЦППО-ПППn, n=1, 2, …, N, соответствующей каждой координате (Xi, Yj, Zk), и формирования на их основе N эталонных матриц Мn, блок формирования корреляционных матриц Фn, предназначенный для формирования N корреляционных матриц Фn, элементами которых являются средние значения ВКФ  соответствующие задержкам сигнала τl,j,k,n в элементах эталонных матриц Мn, сумматор, предназначенный для формирования матрицы измерений
соответствующие задержкам сигнала τl,j,k,n в элементах эталонных матриц Мn, сумматор, предназначенный для формирования матрицы измерений  блок принятия решения, предназначенный для определения элемента матрицы измерений
блок принятия решения, предназначенный для определения элемента матрицы измерений  с максимальным значением средней взаимнокорреляционной функции
с максимальным значением средней взаимнокорреляционной функции  величина которой соответствует наиболее вероятному местоположению ИРИ с координатами (Xi, Yj, Zk), блок сравнения, первый информационный вход которого соединен с информационным выходом блока принятия решения, второй информационный вход является шестой входной шиной ЦППО и пятым установочным входом ЦПО, предназначенный для задания точности определения координат Δd, третий информационный вход соединен со вторым информационным выходом второго вычислителя, первый информационный выход блока сравнения соединен со вторым входом блока формирования матрицы координат Р, а второй информационный выход блока сравнения является выходом ЦПО и выходной шиной ЦППО, пятая входная шина которого предназначена для задания границ контролируемого района с помощью координат точек (X, Y, Z)A, (X, Y, Z)B, (X, Y, Z)C, (X, Y, Z)D, размеров элементарных объемов а, b, с, а', b', с' различных уровней, соединена с первым входом блока формирования матрицы координат Р и является четвертым установочным входом ЦПО, а вход блока формирования эталонных матриц Mn объединен с вторым входом блока принятия решения, входы синхронизации блока формирования эталонных матриц Мn, блока формирования матрицы координат Р, блока формирования корреляционных матриц Фn, сумматора, блока принятия решения, первого и второго вычислителей соединены с выходом тактового генератора, а информационный выход второго вычислителя соединен со вторым информационным входом блока формирования корреляционных матриц Фn.
величина которой соответствует наиболее вероятному местоположению ИРИ с координатами (Xi, Yj, Zk), блок сравнения, первый информационный вход которого соединен с информационным выходом блока принятия решения, второй информационный вход является шестой входной шиной ЦППО и пятым установочным входом ЦПО, предназначенный для задания точности определения координат Δd, третий информационный вход соединен со вторым информационным выходом второго вычислителя, первый информационный выход блока сравнения соединен со вторым входом блока формирования матрицы координат Р, а второй информационный выход блока сравнения является выходом ЦПО и выходной шиной ЦППО, пятая входная шина которого предназначена для задания границ контролируемого района с помощью координат точек (X, Y, Z)A, (X, Y, Z)B, (X, Y, Z)C, (X, Y, Z)D, размеров элементарных объемов а, b, с, а', b', с' различных уровней, соединена с первым входом блока формирования матрицы координат Р и является четвертым установочным входом ЦПО, а вход блока формирования эталонных матриц Mn объединен с вторым входом блока принятия решения, входы синхронизации блока формирования эталонных матриц Мn, блока формирования матрицы координат Р, блока формирования корреляционных матриц Фn, сумматора, блока принятия решения, первого и второго вычислителей соединены с выходом тактового генератора, а информационный выход второго вычислителя соединен со вторым информационным входом блока формирования корреляционных матриц Фn.
Введение новых элементов и связей позволяет достигнуть цели изобретения - обеспечить сокращение временных затрат при определении координат заданного ИРИ при сохранении точностных характеристик в условиях работы на одной частоте нескольких источников радиоизлучения с временным или кодовым разделением каналов.
Заявляемые способы и устройство поясняется чертежами, на которых:
на фиг. 1 приведена структура преамбулы и заголовка PLCP передаваемого фрейма в стандарте IEEE 802.11b;
на фиг. 2 показана структура известных МАС-фреймов:
а) CTS МАС-фрейм;
б) PS-Poll МАС-фрейм;
в) CF-End МАС-фрейм;
г) CF-End+CF-Fck МАС-фрейм;
д) BlockAckRed МАС-фрейм;
на фиг. 3 приведена структура поля Frame Control МАС-фрейма;
на фиг. 4 иллюстрируется значение полей Туре и Subtype для различных типов фрейма;
на фиг. 5 показан обобщенный алгоритм работы первого разностно-дальномерного способа определения координат ИРИ в соответствии с заявляемым изобретением;
на фиг. 6 - приведен обобщенный алгоритм работы второго разностно-дальномерного способа определения координат ИРИ в соответствии с заявляемым изобретением;
на фиг. 7 приведена обобщенная структурная схема устройства, реализующего заявляемые способы;
на фиг. 8 - порядок задания контролируемого района:
а) задание границ контролируемого района;
б) формирование исходных элементарных объемов;
в) определение координат центров исходных элементарных объемов;
г) формирование элементарных объемов уточненного КР;
на фиг. 9 - порядок формирования матрицы координат Р;
на фиг. 10 - порядок формирования одной из N:
а) эталонной матрицы Мn;
б) корреляционной матрицы Фn;
на фиг. 11 - пример визуализации значений задержки сигнала для ЦППО и ППП, где белым цветом показана максимальная задержка, а черным - минимальная;
на фиг. 12 приведено измеренное значение ВКФ для одной измерительной базы;
на фиг. 13 показан результат визуализации значений Rn[τ] на контролируемый район для одной измерительной базы;
на фиг. 14 приведены значения ВКФ для трех измерительных баз;
на фиг. 15 представлена визуализация суммы проекций ВКФ трех измерительных баз;
на фиг. 16 показаны результаты сравнительного анализа прототипа и предлагаемых способов;
на фиг. 17 приведена структурная схема тракта анализа;
на фиг. 18 представлен алгоритм работы блока поиска и анализа заголовка PLCP;
на фиг. 19 показан алгоритм работы первого вычислителя при реализации первого РДСМО ИРИ;
на фиг. 20 приведен алгоритм работы второго вычислителя:
а) при реализации первого РДСМО ИРИ;
б) при реализации второго РДСМО ИРИ;
на фиг. 21 представлен алгоритм работы блока формирования матрицы координат Р;
на фиг. 22 показан алгоритм работы блока формирования эталонных матриц Мn.
Предлагаемые способы рассмотрим на примере широко используемых сетей Wi-Fi. Известно, что в стандарте IEEE 802.11b (см. Приложение Г (информационное). Стандарт IEEE 802.11а, b, g, n. Беспроводные сети передачи данных Wi-Fi. Электронный ресурс. HTTP://ab57.ru/soft/wifidoc.pdf. Дата обращения 23.01.2019) в режиме DSSS в начале каждого отправляемого фрейма данных содержится преамбула и заголовок PLCP, модулированные посредством DBPSK модуляции. В преамбуле, в поле SFD находится индикатор начала фрейма в виде 0xF3A0. В заголовке PLCP содержится информация о способе модуляции самих данных (МАХ-фрейм) и их длина. В поле Signal находится информация о типе цифровой модуляции МАС-фрейма. Значение 0х0А соответствует DBPSK, а 0x14 DQPSK модуляции. Выполнив соответствующий вид демодуляции в начале МАС-фрейма определяют адрес пользователя (устройства ИРИ). Если МАС-адрес обнаруженного фрейма совпадает с МАС-адресом заданного ИРИ, местоопределение которого необходимо определить, то интервал времени, использованный для передачи от преамбулы до завершения данных (МАС-фрейм) целесообразно использовать для местоопределения.
Первый РДСОК ориентирован на мобильное использование в условиях отсутствия априорной информации о характеристиках будущего контролируемого района (стадиона, концертного зала и т.п.). Его реализация поясняется следующим образом (см. фиг. 5, 7). На подготовительном этапе на ЦППО задают контролируемый район в виде прямоугольного параллелепипеда (см. фиг. 8). Вводят систему координат с началом в одной из вершин, с осями 0х, 0у и 0z, направленными вдоль граней параллелепипеда, примыкающих к выбранной вершине. Последние обозначают через А, В и С соответственно. Контролируемый район делят на исходные элементарные объемы (см. фиг. 8, 9) со сторонами а, b и с по осям 0х, 0у и 0z соответственно. Размеры элементарных объемов выбирают исходя из заданных временных затрат ΔT и точности Δd определения координат ИРИ. Далее определяют координаты центров исходных элементарных объемов (Xi, Yj, Zk) (см. фиг. 8в), на основе которых формируют объемную матрицу координат Р размерности А'×В'×С' (см. фиг. 9), Xi=ai, i=1, 2,  Yj=bj, j=1, 2,
Yj=bj, j=1, 2,  Zk=ck, k=1, 2, …,
Zk=ck, k=1, 2, …, 
Для каждого элемента матрицы координат Р всех N измерительных баз определяют эталонные значения разности времени прихода сигналов на ЦППО и n-й, n=1, 2, …, N, ППП τi,j,k,n

где с* - скорость света, (Х0, У0, Z0) - координаты ЦППО, (Хn, Yn, Zn) - координаты n-то ППП, n=1, 2, …, N - номера ППП. С этой целью на подготовительном этапе задают координаты ЦППО и ППП.
На следующем этапе формируют N трехразмерных эталонных матриц Мn, n=1, 2, …, N, элементами каждой из которых являются соответствующие координатам (Xi, Yj, Zk) эталонные значения задержки прихода сигнала τi,j,k,n для n-й измерительной базы ЦППО-ПППn (см. фиг. 10).
Пример визуализации значений задержки для ЦППО и одного ППП показан на фиг. 11. При этом белым цветом показана максимальная задержка, а черным - минимальная. Далее задают МАС-адрес пользователя  длительность интервала анализа Δt и его начало t', частоту сигнала fн.
длительность интервала анализа Δt и его начало t', частоту сигнала fн.
Такой подход к ОК заданного ИРИ обеспечивает повышение точности выполняемых измерений. Известно, что во взаимнокорреляционных функциях R[τ] присутствуют побочные максимумы от отраженных сигналов, иногда с максимальным значением (см. фиг. 12, 14). Последние имеют местоположение на временной оси не соответствующее положению ИРИ. В известных способах и устройствах это приводит к ошибкам измерений координат. В предложенном способе значение ВКФ R[τi,j,k] принимает максимальное значение (глобальный максимум) благодаря тому, что в точке (Xi, Yj, Zk) оно равно сумме величин корреляций, соответствующих местоположению истинным локальным максимумам Rn[τ] всех трех измерительных баз. В свою очередь локальные максимумы, полученные от переотраженных сигналов всех трех измерительных баз, будут распределены случайным образом. Их суммирование не дает глобального максимума ВКФ (см. фиг. 15). На фиг. 14 показаны ВКФ для трех измерительных баз, работающих по сигналам Wi-Fi. На первом и третьем графике ВКФ четко видны побочные пики от отраженных сигналов, причем на третьем графике побочный пик выше, чем истинный, соответствующий истинному положению ИРИ. На фиг. 15 представлена визуализация суммы проекций ВКФ на контролируемый район. Наблюдается пересечение трех линий, образованных истинными пиками ВКФ. Побочные пики не внесли ошибки при определении местоположения ИРИ.
В процессе работы по аналогии с прототипом по линии командной связи с ЦППО передают управляющий сигнал N(fn) на все ППП о их настройке на частоту fn. В результате все NППП настраиваются на данную частоту и начинают ретранслировать на ЦППО сигналы, передаваемые на ней. На ЦППО эти излучения принимают с помощью N-канального радиоприемного устройства и запоминают на заданное время Δt. Одновременно с этим осуществляют прием сигналов этого (этих) ИРИ и на собственный N+1-й приемный тракт и запоминают на заданное время Δt, в течение которого осуществляют их анализ.
Принятые в N+1-м приемном тракте ЦППО сигналы с помощью аналого-цифрового преобразователя (АЦП) и демодулятора (снимают DBPSK модуляцию), преобразуют аналоговый сигнал в битовую последовательность. На его основе осуществляют поиск преамбулы и заголовка PLCP (см. фиг. 1).
В преамбуле в поле SFD содержится значение 0xF3A0, которое служит индикатором начала фрейма. В заголовке PLCP в поле Signal содержится информация о способе цифровой модуляции самих данных (МАС-фрейма). Значение 0x0А соответствует DBPSK модуляции, a 0x14-DQPSK модуляции. Кроме того, в заголовке PLCP содержится информация о длине данных в МАС-фрейме.
Известны МАС-фреймы различных типов: CTS - фиг. 2а, PS-Poll - фиг. 2б, CF-End - фиг. 2в, CF-End+CF-Ack - фиг. 2г, Block Ack Req - фиг. 2д. Помимо перечисленных, существуют и другие типы МАС-фреймов, однако в них отсутствует информация о МАС-адресах передающего устройства. Поэтому их использование затруднено для местоопределения ИРИ.
У всех фреймов в их начале есть поле Frame Control (см. фиг. 3), где содержится информация о типе данного фрейма - это поля Туре и Subtype. Значение этих полей для каждого фрейма показано на фиг. 4. В поле ТА у фреймов содержится МАС-адрес передающего устройства. Для получения названных данных необходимо предварительно выполнить цифровую демодуляцию МАС-фрейма в соответствии с содержимом поля Signal заголовке PLCP.
В случае совпадения МАС-адреса F обнаруженного фрейма с заданным адресом  устройства, участок сигнала с границами от начала преамбулы PLCP t* до конца МАС-фрейма t1 используют для нахождения взаимнокорреляционной функции принятого сигнала Rn[τ]. При этом свертка принятых ЦППО и ППП сигналов Rn может осуществляться как в аналоговом, так и в дискретном виде. В случае использования дискретных сверток (предлагаемый вариант устройства) запомненные сигналы от ППП дополнительно оцифровывают.
устройства, участок сигнала с границами от начала преамбулы PLCP t* до конца МАС-фрейма t1 используют для нахождения взаимнокорреляционной функции принятого сигнала Rn[τ]. При этом свертка принятых ЦППО и ППП сигналов Rn может осуществляться как в аналоговом, так и в дискретном виде. В случае использования дискретных сверток (предлагаемый вариант устройства) запомненные сигналы от ППП дополнительно оцифровывают.
Дополнительная синхронизация при измерении τn не требуется в связи с тем, что обработку всех N+1 сигналов осуществляют в одном месте. Нахождение задержек τn с последующим определением координаты ИРИ выполняют в соответствии со способом-прототипом.
Вычисление ВКФ сигналов Rn[τ], принятой n-й измерительной базой, n=1, 2, …, N, осуществляют для значений временного сдвига  где с* - скорость света,
где с* - скорость света,  - расстояние между ЦППО и n-м ППП с заданным шагом τ0 по формуле:
- расстояние между ЦППО и n-м ППП с заданным шагом τ0 по формуле:

где τ - временной сдвиг между сигналами (задержка),  - сигнал, принятый на ЦППО и сопряженный с ним сигнал,
- сигнал, принятый на ЦППО и сопряженный с ним сигнал,  - сигнал, принятый на n-м ППП и сопряженный с ним сигнал. На фиг. 10 приведено значение ВКФ для одной измерительной базы.
- сигнал, принятый на n-м ППП и сопряженный с ним сигнал. На фиг. 10 приведено значение ВКФ для одной измерительной базы.
Далее определяют среднее значение ВКФ  для каждого исходного элементарного объема контролируемого района на интервале времени
для каждого исходного элементарного объема контролируемого района на интервале времени 

где s - время, за которое радиоволна проходит расстояние, равное диагонали исходного элементарного объема

После этого полученные с помощью (2) - (4) значения каждой рассчитанной средней ВКФ  проецируют на элементы соответствующей n-й эталонной матрицы Mn (элементарные объемы зоны поиска).
проецируют на элементы соответствующей n-й эталонной матрицы Mn (элементарные объемы зоны поиска).
В результате формируют N корреляционных матриц Фn, в которых полученные значения ВКФ  располагаются в соответствующих точках (Xi, Yj, Zk).
располагаются в соответствующих точках (Xi, Yj, Zk).
На следующем этапе значения Фn суммируют по всем N измерительным базам:  За предварительное местоположение заданного ИРИ принимают координаты точки (Xi, Yj, Zk), соответствующей максимальному значению элемента матрицы измерений
За предварительное местоположение заданного ИРИ принимают координаты точки (Xi, Yj, Zk), соответствующей максимальному значению элемента матрицы измерений 

На основании полученных данных задают уточненный контролируемый район в виде прямоугольного параллелепипеда с границами, соответствующими границам выбранного исходного элементарного объема со сторонами а, b и с и центром с координатами (Xi, Yj, Zk). Делят уточненный КР на элементарные объемы (см. фиг. 8г) со сторонами а', b' и с'. При этом а' << а, b' << b, с' << с. В общем случае количество полученных при этом элементарных объемов может отличаться от А'×В'×С' и определяется заданными на этом этапе значениями а', b' и с'. Определяют координаты центров элементарных объемов  На основе найденных координат
На основе найденных координат  формируют матрицу уточненных координат Р' размерности А"×В"×С", где
формируют матрицу уточненных координат Р' размерности А"×В"×С", где 

Далее по аналогии с первым этапом, для каждого элемента  уточненной матрицы координат Р' всех N измерительных баз определяют эталонные значения разности времени прихода сигналов на ЦППО и ПППn
уточненной матрицы координат Р' всех N измерительных баз определяют эталонные значения разности времени прихода сигналов на ЦППО и ПППn  На основе последних формируют N уточненных эталонных матриц
На основе последних формируют N уточненных эталонных матриц  Элементами каждой из них являются соответствующие координатам
Элементами каждой из них являются соответствующие координатам  эталонные значения задержки прихода сигналов
эталонные значения задержки прихода сигналов  в соответствии с (1).
в соответствии с (1).
На основе выражений (2) - (4) вычисляют средние значения ВКФ  для каждого элементарного объема уточненного контролируемого района на интервале времени
для каждого элементарного объема уточненного контролируемого района на интервале времени 
 где s' - время, за которое радиоволна проходит расстояние, равное диагонали элементарного объема уточненного контролируемого района.
где s' - время, за которое радиоволна проходит расстояние, равное диагонали элементарного объема уточненного контролируемого района.
После этого формируют N уточненных корреляционных матриц  путем замены значений задержки
путем замены значений задержки  в элементах матриц
в элементах матриц  на соответствующие им значения ВКФ
на соответствующие им значения ВКФ  Сформированные корреляционные матрицы
Сформированные корреляционные матрицы  суммируют по всем N измерительным базам
суммируют по всем N измерительным базам  За наиболее вероятное местоположение ИРИ принимают координаты точки
За наиболее вероятное местоположение ИРИ принимают координаты точки  которая соответствует максимальному значению элемента уточненной корреляционной матрицы измерений
которая соответствует максимальному значению элемента уточненной корреляционной матрицы измерений 
На завершающем этапе сравнивают размеры половины длины диагонали элементарного объема уточненного контролируемого района  с заданной точностью определения координат Δd. Значение d" определяют из выражения
с заданной точностью определения координат Δd. Значение d" определяют из выражения

При выполнении неравенства  обнаруженному ИРИ присваивают координаты
обнаруженному ИРИ присваивают координаты  в противном случае начинают новый цикл уточнения координат ИРИ.
в противном случае начинают новый цикл уточнения координат ИРИ.
Второй вариант РДСМО предназначен для стационарного использования в условиях, когда априорно известен контролируемый район, местоположение ЦППО и NППП, требования по ΔT и Δd. В этих условиях имеется возможность оптимально задать размеры исходных элементарных объемов (их количество), элементарных объемов уточненных контролируемых районов (их количество), определить необходимое количество циклов оценивания координат (как правило два и три) для обеспечения минимизации временных затрат min ΔT при сохранении заданных точностных характеристик Δd.
Возможность расчета на подготовительном этапе всех эталонных параметров  позволяет существенно снизить временные затраты на определение координат ИРИ. Кроме того, определяется необходимое количество циклов детализации КР для достижения заданных требований по точности ОК ИРИ Δd. Его реализация поясняется следующим образом (см. фиг. 6 и 7). По аналогии с первым РДСМО на подготовительном этапе на ЦППО задают контролируемый район в виде прямоугольного параллелепипеда (см. фиг. 8). Вводят систему координат с началом в одной из вершин, с осями 0х, 0у и 0z, направленными вдоль граней параллелепипеда, примыкающих к выбранной вершине. Последние обозначают через А, В и С соответственно. Контролируемый район делят на исходные элементарные объемы (см. фиг. 8 и 9), со сторонами а, b и с по осям 0х, 0у и 0z соответственно. Далее определяют координаты центров исходных ЭО (Xi, Yj, Zk) (см. фиг. 8в). На основе полученных координат формируют объемную матрицу координат Р размерности А'×В'×С' (см. фиг. 9). Здесь Xi=ai, i=1, 2, …, А/2=A'; Yj=bj, j=1, 2, …, B/b=В'; Zk=ck, k=1, 2, …, С/с=С'.
позволяет существенно снизить временные затраты на определение координат ИРИ. Кроме того, определяется необходимое количество циклов детализации КР для достижения заданных требований по точности ОК ИРИ Δd. Его реализация поясняется следующим образом (см. фиг. 6 и 7). По аналогии с первым РДСМО на подготовительном этапе на ЦППО задают контролируемый район в виде прямоугольного параллелепипеда (см. фиг. 8). Вводят систему координат с началом в одной из вершин, с осями 0х, 0у и 0z, направленными вдоль граней параллелепипеда, примыкающих к выбранной вершине. Последние обозначают через А, В и С соответственно. Контролируемый район делят на исходные элементарные объемы (см. фиг. 8 и 9), со сторонами а, b и с по осям 0х, 0у и 0z соответственно. Далее определяют координаты центров исходных ЭО (Xi, Yj, Zk) (см. фиг. 8в). На основе полученных координат формируют объемную матрицу координат Р размерности А'×В'×С' (см. фиг. 9). Здесь Xi=ai, i=1, 2, …, А/2=A'; Yj=bj, j=1, 2, …, B/b=В'; Zk=ck, k=1, 2, …, С/с=С'.
Для каждого элемента матрицы координат Р всех N измерительных баз определяют эталонные значения разности времени прихода сигналов на ЦППО и n-й ПППn τi,j,k,n, n=1, 2, …, N, в соответствии с (1).
На следующем этапе формируют N трехразмерных эталонных матриц Mn, n=1, 2, …, N, элементами каждой их которых являются соответствующие координатам (Xi, Yj, Zk) эталонные значения задержки прихода сигналов τi,j,k,n для n-й измерительной базы ЦППО - ПППn.
Далее дополнительно к первому РДСМО задают А'×В'×С' равных по размерам уточненных контролируемых районов в виде прямоугольных параллелепипедов с границами, соответствующими границам соответствующих исходных элементарных объемов со сторонами а, b и с и центрами с координатами (Xi, Yj, Zk), делят каждый уточненный контролируемый район на элементарные объемы со сторонами а', b' и с', а' << а, b' << b, с' << с, определяют координаты центров элементарных объемов  , на основе которых формируют А'×В'×С'=Н объемных матриц координат
, на основе которых формируют А'×В'×С'=Н объемных матриц координат  h=1, 2, …,Н, размерности А"×В"×С", где А"=а/а', В"=b/b', С"=с/с'. Для каждого элемента уточненных матриц координат h=1, 2, …. Н, и всех N измерительных баз определяют эталонные значения разности времени прихода сигналов на ЦППО и ПППn τi,j,k,n. На их основе формируют Н×N уточненных эталонных матриц
h=1, 2, …,Н, размерности А"×В"×С", где А"=а/а', В"=b/b', С"=с/с'. Для каждого элемента уточненных матриц координат h=1, 2, …. Н, и всех N измерительных баз определяют эталонные значения разности времени прихода сигналов на ЦППО и ПППn τi,j,k,n. На их основе формируют Н×N уточненных эталонных матриц  элементами каждой из которых являются соответствующие координатам
элементами каждой из которых являются соответствующие координатам  эталонные значения задержки прихода сигнала
эталонные значения задержки прихода сигнала  для n-й измерительной базы.
для n-й измерительной базы.
Сравнивают размеры половины длины диагонали элементарного объема уточненного контролируемого района d"/2 с заданной точностью определения координат Δd. Значения d" определяют в соответствии с выражением (5). При выполнении неравенства  завершают подготовительный этап. В противном случае начинают новый цикл детализации каждого уточненного контролируемого района и формирования соответствующих дополнительных эталонных матриц
завершают подготовительный этап. В противном случае начинают новый цикл детализации каждого уточненного контролируемого района и формирования соответствующих дополнительных эталонных матриц 
В процессе работы по второму РДСМО для измерения разности времени приема сигналов вычисляют ВКФ сигналов Rn[τ], принятых на n-м ППП, n=1, 2, …, N, и ЦППО, для значений временного сдвига в интервале  и заданным шагом Дт в соответствии с (2). Далее определяют среднее значение ВКФ
и заданным шагом Дт в соответствии с (2). Далее определяют среднее значение ВКФ  для каждого исходного элементарного объема КР на интервале времени
для каждого исходного элементарного объема КР на интервале времени  в соответствии с (3) и (4), где s - время, за которое радиоволна проходит расстояние, равное диагонали исходного ЭО.
в соответствии с (3) и (4), где s - время, за которое радиоволна проходит расстояние, равное диагонали исходного ЭО.
На основе N эталонных матриц Мn, сформированных на подготовительном этапе, формируют N соответствующих корреляционных матриц Фn путем замены значений задержки сигнала τi,j,k,n на соответствующее им измеренные средние значения ВКФ  Матрицы Фn, n=1, 2, …, N, суммируют по всем N измерительным базам
Матрицы Фn, n=1, 2, …, N, суммируют по всем N измерительным базам 
За предварительное местоположение ИРИ принимают координаты точки (Xi, Yj, Zk), соответствующее максимальному значению элемента матрицы измерений 
На следующем этапе задают уточненный контролируемый район в виде прямоугольного параллелепипеда с границами, соответствующими границам исходного выбранного ЭО с максимальным значением шах  Последний имеет размеры сторон а, b, и с и центр с координатами (Xi, Yj, Zk). На подготовительном этапе осуществлено его разбиение на ЭО со сторонами а', b' и с', найдены координаты их центров, определены эталонные задержки сигналов и сформировать N×Н уточненных эталонных матриц
Последний имеет размеры сторон а, b, и с и центр с координатами (Xi, Yj, Zk). На подготовительном этапе осуществлено его разбиение на ЭО со сторонами а', b' и с', найдены координаты их центров, определены эталонные задержки сигналов и сформировать N×Н уточненных эталонных матриц  Поэтому в процессе измерений на выполнение этих операций не требуется задействования временных и вычислительных затрат. Вычисляют средние значения ВКФ
Поэтому в процессе измерений на выполнение этих операций не требуется задействования временных и вычислительных затрат. Вычисляют средние значения ВКФ  для каждого h-го элементарного объема уточненного контролируемого района на интервале времени
для каждого h-го элементарного объема уточненного контролируемого района на интервале времени  где s' - время, за которое радиоволна проходит расстояние, равное диагонали ЭО уточненного контролируемого района. Данную операцию осуществляют в соответствии с выражениями (2) - (4).
где s' - время, за которое радиоволна проходит расстояние, равное диагонали ЭО уточненного контролируемого района. Данную операцию осуществляют в соответствии с выражениями (2) - (4).
Далее формируют N уточненных корреляционных матриц  путем замены элементов задержки
путем замены элементов задержки  на соответствующие средние значения ВКФ
на соответствующие средние значения ВКФ  Значения матриц
Значения матриц  суммируют по всем N измерительным базам
суммируют по всем N измерительным базам  а за уточненное местоположение ИРИ принимают координаты точки
а за уточненное местоположение ИРИ принимают координаты точки  соответствующей максимальному значению элемента уточненной матрицы измерений
соответствующей максимальному значению элемента уточненной матрицы измерений 
В случае отсутствия дальнейшей детализации контролируемого района, выполненного на подготовительном этапе, уточненное значение координат точки  принимают за наиболее вероятные координаты обнаруженного ИРИ. Выполнен сравнительный анализ прототипа и обеих предлагаемых способов по их быстродействию в зависимости от объема контролируемого района (см. фиг. 16). В качестве исходных данных для моделирования было задано:
принимают за наиболее вероятные координаты обнаруженного ИРИ. Выполнен сравнительный анализ прототипа и обеих предлагаемых способов по их быстродействию в зависимости от объема контролируемого района (см. фиг. 16). В качестве исходных данных для моделирования было задано:
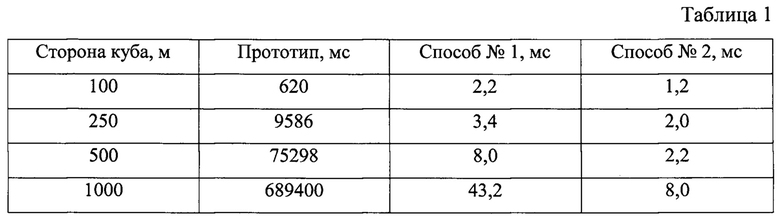
контролируемый район имеет форму куба;
длина А, В и С лежит в пределах 100 м - 2000 м;
задана точность определения местоположения ИРИ Δd=1 м;
используется три этапа обработки результатов измерений координат:
а=b=с=25 м; а'=b'=с'=5 м; а"=b"=с"=1 м.
При этом полагалось, что в прототипе осуществлялась обработка результатов измерений в один этап. Представленные на фиг. 16 результаты моделирования свидетельствуют о многократном выигрыше предполагаемых способов над прототипом по быстродействию определения координат ИРИ. Последний существенно (в геометрической прогрессии) возрастает с увеличением размеров КР. Натурные испытания предложенных способов для различных КР подтвердили представленные результаты моделирования на фиг. 16 и в табл. 1.
Заявленное устройство определения координат ИРИ на основе первого разностно-дальномерного способа (см. фиг. 7) содержит N периферийных пунктов приема 1.1-1.N и центральный пункт приема и обработки 2, причем каждый ППП 1.1-1.N состоит из последовательно соединенных тракта приема радиосигналов 4 и тракта ретрансляции радиосигналов 5, а ЦППО 2 содержит радиопередатчик 7, предназначенный для реализации командной линии связи, N+1 трактов приема радиосигналов 8.1-8.N+1 и центральный пост обработки 3, выход которого является выходной шиной 25 ЦППО 2, причем N+1 информационных входов ЦПО 3 соединены с выходами соответствующих трактов приема сигналов 8.1-8.N+1, первая входная шина 6 ЦППО 2 является входом управления радиопередатчиком 7 и соединена с входами управления трактов приема радиосигналов 8.1-8.N+1 ЦППО 2, предназначена для задания частоты настройки fн трактов приема радиосигналов 8.1-8.N+1, а центральный пост обработки 3 выполнен содержащим N+1 аналогово-цифровых преобразователей 9.1-9.N+1, входы которых являются соответственно N+1 информационными входами ЦПО 3, N+1 блоков памяти 13.1-13.N+1, группы информационных входов которых соединены с выходами соответствующих аналого-цифровых преобразователей 9.1-9.N+1, блок управления 11, предназначенный для задания длительности интервала анализа Δt и его начала t', тракт анализа 12, предназначенный для определения начала очередного фрейма t*, его длительности Δtp, вида модуляции МАС-фрейма и его демодуляции, определения адреса текущего пользователя F, второй вход которого является вторым установочным входом ЦПО 3 и третьей входной шиной 23 ЦППО 2, предназначенной для задания адреса пользователя  первый информационный вход тракта анализа 12 соединен с выходом N+1-го аналого-цифрового преобразователя 9.N+1, а выход объединен с первыми входами управления N+1 блоков памяти 13.1-13.N+1 и вторым входом блока управления 11, первый вход которого является первым установочным входом ЦПО 3 и второй входной шиной 10 ЦППО 2, предназначенной для задания интервала анализа Δt и его начала t', а выход соединен со вторыми входами управления блоков памяти 9.1-9.N+1 и третьим входом тракта анализа 12, генератор тактовых импульсов 14, выход которого соединен с входами синхронизации N+1 аналого-цифровых преобразователей 9.1-9.N+1, блока управления 11, тракта анализа 12,
первый информационный вход тракта анализа 12 соединен с выходом N+1-го аналого-цифрового преобразователя 9.N+1, а выход объединен с первыми входами управления N+1 блоков памяти 13.1-13.N+1 и вторым входом блока управления 11, первый вход которого является первым установочным входом ЦПО 3 и второй входной шиной 10 ЦППО 2, предназначенной для задания интервала анализа Δt и его начала t', а выход соединен со вторыми входами управления блоков памяти 9.1-9.N+1 и третьим входом тракта анализа 12, генератор тактовых импульсов 14, выход которого соединен с входами синхронизации N+1 аналого-цифровых преобразователей 9.1-9.N+1, блока управления 11, тракта анализа 12,
Кроме того, ЦПО 3 содержит первый вычислитель 15, предназначенный для нахождения взаимнокорреляционной функции сигналов Rn[τ], принятых на n-м ППП 1.n, n=1, 2, …, N, и на ЦППО 2, для значений временного сдвига в интервале  с заданным шагом Δτ, группа из N+1 входов первого вычислителя 15 соединена с информационными выходами соответствующих N+1 блоков памяти 13.1-13.N+1, второй вычислитель 16, предназначенный для нахождения среднего значения ВКФ
с заданным шагом Δτ, группа из N+1 входов первого вычислителя 15 соединена с информационными выходами соответствующих N+1 блоков памяти 13.1-13.N+1, второй вычислитель 16, предназначенный для нахождения среднего значения ВКФ  первый информационный вход которого соединен с информационным выходом первого вычислителя 15, четвертая входная шина 26 ЦППО 2, предназначена для задания координат ППП (X, Y, Z)n и ЦППО {X, Y, Z}4, соединена с N+2 входом первого вычислителя 15 и является третьим установочным входом ЦПО 3, последовательно соединенные блок формирования матрицы координат Р 19, предназначенный для определения координат центров исходных и уточненных элементарных объемов (Xi, Yj, Zk) контролируемого района и формирования на их основе соответствующей матрицы координат Р, блок формирования эталонных матриц Mn 18, предназначенный для вычислений задержек прихода сигнала τl,j,k,n для n-й измерительной базы ЦППО 2 - ПППn 1.n, n=1, 2, …, N, соответствующей каждой координате (Xi, Yj, Zk), и формирования на их основе 7V эталонных матриц Мn, блок формирования корреляционных матриц Фn 17, предназначенный для формирования N корреляционных матриц Фn, элементами которых являются средние значения ВКФ
первый информационный вход которого соединен с информационным выходом первого вычислителя 15, четвертая входная шина 26 ЦППО 2, предназначена для задания координат ППП (X, Y, Z)n и ЦППО {X, Y, Z}4, соединена с N+2 входом первого вычислителя 15 и является третьим установочным входом ЦПО 3, последовательно соединенные блок формирования матрицы координат Р 19, предназначенный для определения координат центров исходных и уточненных элементарных объемов (Xi, Yj, Zk) контролируемого района и формирования на их основе соответствующей матрицы координат Р, блок формирования эталонных матриц Mn 18, предназначенный для вычислений задержек прихода сигнала τl,j,k,n для n-й измерительной базы ЦППО 2 - ПППn 1.n, n=1, 2, …, N, соответствующей каждой координате (Xi, Yj, Zk), и формирования на их основе 7V эталонных матриц Мn, блок формирования корреляционных матриц Фn 17, предназначенный для формирования N корреляционных матриц Фn, элементами которых являются средние значения ВКФ  соответствующие задержкам сигнала τl,j,k,n в элементах эталонных матриц Мn, сумматор 20, предназначенный для формирования матрицы измерений
соответствующие задержкам сигнала τl,j,k,n в элементах эталонных матриц Мn, сумматор 20, предназначенный для формирования матрицы измерений  блок принятия решения 21, предназначенный для определения элемента матрицы измерений
блок принятия решения 21, предназначенный для определения элемента матрицы измерений  с максимальным значением средней взаимнокорреляционной функции
с максимальным значением средней взаимнокорреляционной функции  величина которой соответствует наиболее вероятному местоположению ИРИ с координатами (Xi, Yj, Zk), блок сравнения 22, первый информационный вход которого соединен с информационным выходом блока принятия решения 21, второй информационный вход является шестой входной шиной 27 ЦППО 2 и пятым установочным входом ЦПО 3, предназначенный для задания точности определения координат Ad, третий информационный вход соединен со вторым информационным выходом второго вычислителя 16, первый информационный выход блока сравнения 22 соединен со вторым входом блока формирования матрицы координат Р 19, а второй информационный выход блока сравнения 22 является выходом ЦПО 3 и выходной шиной 25 ЦППО 2, пятая входная шина 24 которого предназначена для задания границ контролируемого района с помощью координат точек (X, Y, Z)A, (X, Y, Z)B, (X, Y, Z)C, (X, Y, Z)D, размеров элементарных объемов a, b, с, а', b', с' различных уровней, соединена с первым входом блока формирования матрицы координат Р 19 и является четвертым установочным входом ЦПО 3, а вход блока формирования эталонных матриц Mn 18 объединен с вторым входом блока принятия решения 21, входы синхронизации блока формирования эталонных матриц Mn 18, блока формирования матрицы координат Р 19, блока формирования корреляционных матриц Фn 17, сумматора 20, блока принятия решения 21, первого 15 и второго 16 вычислителей соединены с выходом тактового генератора 14, а информационный выход второго вычислителя 16 соединен со вторым информационным входом блока формирования корреляционных матриц Фn 17.
величина которой соответствует наиболее вероятному местоположению ИРИ с координатами (Xi, Yj, Zk), блок сравнения 22, первый информационный вход которого соединен с информационным выходом блока принятия решения 21, второй информационный вход является шестой входной шиной 27 ЦППО 2 и пятым установочным входом ЦПО 3, предназначенный для задания точности определения координат Ad, третий информационный вход соединен со вторым информационным выходом второго вычислителя 16, первый информационный выход блока сравнения 22 соединен со вторым входом блока формирования матрицы координат Р 19, а второй информационный выход блока сравнения 22 является выходом ЦПО 3 и выходной шиной 25 ЦППО 2, пятая входная шина 24 которого предназначена для задания границ контролируемого района с помощью координат точек (X, Y, Z)A, (X, Y, Z)B, (X, Y, Z)C, (X, Y, Z)D, размеров элементарных объемов a, b, с, а', b', с' различных уровней, соединена с первым входом блока формирования матрицы координат Р 19 и является четвертым установочным входом ЦПО 3, а вход блока формирования эталонных матриц Mn 18 объединен с вторым входом блока принятия решения 21, входы синхронизации блока формирования эталонных матриц Mn 18, блока формирования матрицы координат Р 19, блока формирования корреляционных матриц Фn 17, сумматора 20, блока принятия решения 21, первого 15 и второго 16 вычислителей соединены с выходом тактового генератора 14, а информационный выход второго вычислителя 16 соединен со вторым информационным входом блока формирования корреляционных матриц Фn 17.
Работа устройства (см. фиг. 7, 8 и 17) осуществляется следующим образом. На подготовительном этапе задают структуру измерителя: количество ППП 1 N, например, N=3, находят их координаты (X, Y, Z)n. Определяют координаты ЦППО 2 (X, Y, Z)n+1. По шине 26 полученные данные заносят в первый вычислитель 15 ЦПО 3. По второй входной шине 10 ЦППО 2 задают интервал анализа Δt (временной интервал, на который одновременно запоминают в блоках 13.1-13.4 сигналы ИРИ) и его начало t'. По первой входной шине 6 ЦППО 2 поступает значение частоты сигнала fн для настройки на нее приемных трактов 8.1-8.4 ЦППО 2. Опосредованно через радиостанцию 7 с помощью кода частоты N(fн) осуществляют настройку приемных трактов 4.1-4.3 ППП 1. Третья входная шина 23 ЦППО 2 используется для задания МАС-адреса пользователя  координаты которого необходимо определить.
координаты которого необходимо определить.
В виде прямоугольного параллелепипеда задают контролируемый район, в котором будет осуществляться поиск и местоопределение заданного ИРИ. Эта операция осуществляется по команде, поступающей на пятую входную шину 24 ЦППО 2. Границы района задают координатами четырех точек (X, Y, Z)A, (X, Y, Z)B, (X, Y, Z)C и (X, Y, Z)D. Вводят систему координат с началом в одной из его вершин с осями 0х, 0у и 0z, направленными вдоль граней, примыкающих к выбранной вершине, которые обозначают через А, В и С соответственно (см. фиг. 8а). КР делят на исходные элементарные объемы со сторонами а, b и с, значения которых также задают по шине 24. Эту операцию выполняет блок 19. Далее с помощью блока 19 определяют центры исходных элементарных объемов (см. фиг. 8б, в). На основе полученных координат [Xi, Yj, Zk) с помощью блока 19 формируют матрицу координат Р размерности А'×В'×С', где Xi=ai, i=1, 2, …, А/а=А', Yj=bj, j=1, 2, …, B/b=B', Zk=zk, k=1, 2, …, C/c=С (см. фиг. 9).
Для каждого элемента (Xi, Yj, Zk) матрицы Р и всех N измерительных баз в соответствии с (1) в блоке 18 определяют эталонные значения разности времени прихода сигнала на ЦППО и ПППn, n=1, 2, …, N. На основе полученных данных формируют N матриц эталонных значений Мп путем замены элементов (Xi, Yj, Zk) матрицы координат Р на соответствующие значения эталонных задержек τi,j,k,n.
Каждый ППП 1.1-1.3 сигналов ИРИ представляет совокупность последовательно соединенных трактов приема радиосигналов 4.n и трактов ретрансляции радиосигналов 5.n, n=1, 2 или 3. Тракты 4.n настраиваются на заданную частоту fн по команде N(fн), поступающей от ЦППО 2 по линии командной радиосвязи. Центральный пункт приема и обработки 2 содержит радиопередатчик 7, предназначенный для реализации командной линии связи, совокупность из N+1 (четырех) трактов приема радиосигналов 8.1-8.4 и центральный пункт обработки 3 (см. фиг. 7) в составе: блок управления 11, тракт анализа 12, аналого-цифровые преобразователи 9.1-9.4, блоки памяти 13.1-13.4, первый вычислитель 15, второй вычислитель 16, блок формирования корреляционных матриц Фn 17, блок формирования эталонных матриц Mn 18, блок формирования матрицы координат Р 19, сумматор 20, блок принятия решения 21, блок сравнения 22 и генератор тактовых импульсов 14.
Сигналы ИРИ, принятые на ЦППО 2 и ППП 1.1-1.3 с выходов трактов 8.1-8.4 поступают на входы соответствующих АЦП 9.1-9.4. Оцифрованные сигнальные потоки a1(t), a2(t), a3(t) и a4(t) с выходов блоков 9.1-9.4 далее следуют на информационные входы соответствующих блоков памяти 13.1-13.4. Операция начала одновременной записи сигналов в блоки 13.1-13.4 осуществляется по команде блока управления 11 в момент времени t', которая поступает на их вторые управляющие входы. Для этого на выходе блока 11 формируется импульс прямоугольной формы заданной длительности Δt. Значение Δt выбирается из расчета:

где tпр - длительность преамбулы PLCP 144 бит, tзаг - длительность заголовка PLCP 48 бит, tcp - средняя длительность МАС-файла. За интервал времени Δt необходимо обнаружить и проанализировать целостное излучение одного из пользователей системы Wi-Fi.
Сигналы ИРИ, принятые непосредственно на ЦППО 2 трактом 8.4 x4(t) и преобразованные в цифровую форму x'4(t) блоком 9.4, поступают на вход тракта анализа 12. Его работа начинается в момент времени t' с приходом управляющего сигнала блока 11 на его третий вход. В функции тракта 12 входит определение начала очередного фрейма t*, его длительность  вид модуляции МАС-фрейма и его демодуляция, определение адреса текущего пользователя F, сравнение его с заданным на подготовительном этапе работы устройства адресом
вид модуляции МАС-фрейма и его демодуляция, определение адреса текущего пользователя F, сравнение его с заданным на подготовительном этапе работы устройства адресом  При положительном решении блок 12 выдает временной интервал
При положительном решении блок 12 выдает временной интервал  измерения пространственных параметров заданного
измерения пространственных параметров заданного  ИРИ,
ИРИ,  который начинается с момента t*. Здесь
который начинается с момента t*. Здесь  - длительность МАС-фрейма
- длительность МАС-фрейма  абонента. Однако при определении значения
абонента. Однако при определении значения  следует учитывать задержки сигнала ИРИ в точках его приема на ЦППО 2 и ППП 1.n. В противном случае это может привести к погрешностям измерения задержек сигналов. Поэтому временной интервал
следует учитывать задержки сигнала ИРИ в точках его приема на ЦППО 2 и ППП 1.n. В противном случае это может привести к погрешностям измерения задержек сигналов. Поэтому временной интервал  целесообразно сократить и начать с заголовка фрейма.
целесообразно сократить и начать с заголовка фрейма.
После принятия решения об обнаружении сигналов заданного  абонента трактом 12 формируется управляющий сигнал, поступающий на первые входы управления блоков памяти 13.1-13.4. В результате содержимое последних начиная с момента t* и до окончания l-го фрейма t1 поступает на соответствующие входы первого вычислителя 15.
абонента трактом 12 формируется управляющий сигнал, поступающий на первые входы управления блоков памяти 13.1-13.4. В результате содержимое последних начиная с момента t* и до окончания l-го фрейма t1 поступает на соответствующие входы первого вычислителя 15.
В противном случае, когда фрейм с заданным  абонентом в рамках интервала времени Δt не обнаружен, трактом 12 формируется управляющий сигнал, поступающий на первые входы управления блоков памяти 13.1-13.4, который обнуляет их содержимое. Кроме того, этот сигнал поступает на второй вход блока управления 11. В результате блоком 11 формируется новый управляющий сигнал длительностью Δt, в результате появления которого начинается новый цикл работы устройства по записи очередной выборки сигналов ИРИ в блоки 13.1-13.4 и их анализ.
абонентом в рамках интервала времени Δt не обнаружен, трактом 12 формируется управляющий сигнал, поступающий на первые входы управления блоков памяти 13.1-13.4, который обнуляет их содержимое. Кроме того, этот сигнал поступает на второй вход блока управления 11. В результате блоком 11 формируется новый управляющий сигнал длительностью Δt, в результате появления которого начинается новый цикл работы устройства по записи очередной выборки сигналов ИРИ в блоки 13.1-13.4 и их анализ.
Первый вычислитель 15 предназначен для вычисления N взаимнокорреляционных функций Rn[τ] в соответствии с (2). Для этого дополнительно по четвертой входной шине 26 в блок 15 поступают координаты местоположения ППП 1.n (X, Y, Z)n, n=1, 2, 3; координаты ЦППО 2 (X, Y, Z)4, значение шага корреляции Δτ, соответствующего частоте дискретизации. В блоке 15 дополнительно вычисляется значение границ временного сдвига τ при нахождении ВКФ для каждой измерительной базы, расстояние между ЦППО 2 и ППП 1.n dn. Полученные значения ВКФ Rn[τ] поступают на первый информационный вход второго вычислителя 17. В функции последнего входит определение средних значений ВКФ  для каждого исходного элементарного объема в соответствии с (3) на интервале времени
для каждого исходного элементарного объема в соответствии с (3) на интервале времени  Значение s вычисляют в соответствии с (4) на основе поступивших по шине 24 на второй вход блока 16 значений а, b и с. Найденные значения
Значение s вычисляют в соответствии с (4) на основе поступивших по шине 24 на второй вход блока 16 значений а, b и с. Найденные значения  далее следуют на второй вход блока формирования корреляционных матриц Фn 17. На первый вход блока 17 поступают значения N матриц эталонных значений Mn блока 18. В функции блока 17 входит формирование N корреляционных матриц Фn путем замены элементов задержки τi,j,k,n матриц Mn на соответствующие им измеренные значения ВКФ
далее следуют на второй вход блока формирования корреляционных матриц Фn 17. На первый вход блока 17 поступают значения N матриц эталонных значений Mn блока 18. В функции блока 17 входит формирование N корреляционных матриц Фn путем замены элементов задержки τi,j,k,n матриц Mn на соответствующие им измеренные значения ВКФ  поступающие с выхода блока 16.
поступающие с выхода блока 16.
Сформированные блоком 17 значения N корреляционных матриц Фn поступают на вход сумматора 20. В функцию блока 20 входит выполнение операции суммирования  Полученные в результате выполнения этой операции значения элементов матрицы измерений
Полученные в результате выполнения этой операции значения элементов матрицы измерений  поступают на вход блока 21. В функцию последнего входит определение элемента матрицы измерений
поступают на вход блока 21. В функцию последнего входит определение элемента матрицы измерений  с максимальным значением
с максимальным значением  и формирование на своем выходе соответствующих координат (Xi, Yj, Zk) как arg max
и формирование на своем выходе соответствующих координат (Xi, Yj, Zk) как arg max 
Полученные в блоке 21 значения предварительных координат (Xi, Yj, Zk) поступает на первый информационный вход блока сравнения 22. На второй его информационный вход по шестой входной шине 27 ЦППО 2 поступает заданное на подготовительном этапе значение точности определения координат Δd. По третьему информационному входу в блок сравнения 22 со второго выхода второго вычислителя 16 поступает значение d'. Последнее определяют в блоке 16 в соответствии с выражением  В функции блока 22 входит принятие решения о достижении заданной точности Δd при определении координат ИРИ. В случае выполнения неравенства
В функции блока 22 входит принятие решения о достижении заданной точности Δd при определении координат ИРИ. В случае выполнения неравенства  найденное значение (Xi, Yj, Zk) с первого выхода блока 22 поступает на выход устройства (выходную шину 25). В противном случае начинается новый цикл уточнения координат. В этом случае на втором выходе блока 22 формируется управляющий сигнал, поступающий на второй вход блока формирования матрицы координат 19. Он содержит координаты центра выбранного исходного элементарного объема КР (Xi, Yj, Zk). В функции блока 19 на текущем этапе входит деление выбранного исходного элементарного объема на прямоугольные параллелепипеды со сторонами а', b' и с', а' << а, b' << b, с' << с. Значения последних по шине 24 поступают на вход блока 19. Далее с помощью блока 19 определяют координаты центров уточненных элементарных объемов
найденное значение (Xi, Yj, Zk) с первого выхода блока 22 поступает на выход устройства (выходную шину 25). В противном случае начинается новый цикл уточнения координат. В этом случае на втором выходе блока 22 формируется управляющий сигнал, поступающий на второй вход блока формирования матрицы координат 19. Он содержит координаты центра выбранного исходного элементарного объема КР (Xi, Yj, Zk). В функции блока 19 на текущем этапе входит деление выбранного исходного элементарного объема на прямоугольные параллелепипеды со сторонами а', b' и с', а' << а, b' << b, с' << с. Значения последних по шине 24 поступают на вход блока 19. Далее с помощью блока 19 определяют координаты центров уточненных элементарных объемов  на основе которых формируют объемную уточненную матрицу координат Р' размерности А"×В"×С", где
на основе которых формируют объемную уточненную матрицу координат Р' размерности А"×В"×С", где  Значение Р', сформированное в блоке 19 поступает на информационный вход блока 18.
Значение Р', сформированное в блоке 19 поступает на информационный вход блока 18.
На данном этапе блок 18 предназначен для определения значений эталонных значений разности времени прихода сигнала  ИРИ на ЦППО 2 и ПППn 1.n для каждого элемента матрицы Р'
ИРИ на ЦППО 2 и ПППn 1.n для каждого элемента матрицы Р'  всех N измерительных баз. На основе полученных данных в блоке 18 формируют N уточненных значений эталонных матриц
всех N измерительных баз. На основе полученных данных в блоке 18 формируют N уточненных значений эталонных матриц  элементами каждой из которых являются соответствующие координатам
элементами каждой из которых являются соответствующие координатам  эталонные значения задержки прихода сигналов
эталонные значения задержки прихода сигналов 
Во втором вычислителе 16 вычисляют в соответствии с (3) значение ВКФ  для каждого элементарного объема уточненного контролируемого района на интервале времени s'. Данный временной интервал определяют в соответствии с (4) на основе поступивших по шине 24 значений а', b' и с'.
для каждого элементарного объема уточненного контролируемого района на интервале времени s'. Данный временной интервал определяют в соответствии с (4) на основе поступивших по шине 24 значений а', b' и с'.
Найденные в блоке 16 значения  следуют на второй вход блока 17.
следуют на второй вход блока 17.
На первый его вход поступают значения N эталонных матриц Mn с выхода блока 18. В функции блока 17 на данном этапе входит формирование N уточненных корреляционных матриц  путем замены значений задержки
путем замены значений задержки  на соответствующие средние значения ВКФ
на соответствующие средние значения ВКФ 
Сформированные N уточненных корреляционных матриц  поступают на вход сумматора 20. В блоке 20 значения матриц
поступают на вход сумматора 20. В блоке 20 значения матриц  суммируют по всем N измерительным базам. В результате формируют уточненную матрицу измерений
суммируют по всем N измерительным базам. В результате формируют уточненную матрицу измерений 
Значение  поступает на первый вход блока принятия решения 21. В функцию блока 21 на этом этапе входит поиск максимального элемента уточненной матрицы измерений
поступает на первый вход блока принятия решения 21. В функцию блока 21 на этом этапе входит поиск максимального элемента уточненной матрицы измерений  За наиболее вероятное местоположение ИРИ принимают координаты точки
За наиболее вероятное местоположение ИРИ принимают координаты точки  соответствующей максимальному значению элемента уточненной матрицы измерений
соответствующей максимальному значению элемента уточненной матрицы измерений  Значения соответствующих элементам матрицы
Значения соответствующих элементам матрицы  координат в виде матрицы Р поступают на второй вход в блоке 21 с выхода блока 19 (матрицы
координат в виде матрицы Р поступают на второй вход в блоке 21 с выхода блока 19 (матрицы  и Р имеют одну размерность).
и Р имеют одну размерность).
Полученные в блоке 21 уточненные значения координат  поступают на первый информационный вход блока сравнения 22. На второй его информационный вход по шестой входной шине 27 ЦППО 2 поступает заданное значение точности определения координат Δd. По третьему информационному входу в блок 22 со второго выхода второго вычислителя 16 поступает значение d". Значение d" рассчитывает блок 16 в соответствии с (5). В блоке 22 сравнивают значения d" и Δd. При выполнении неравенства
поступают на первый информационный вход блока сравнения 22. На второй его информационный вход по шестой входной шине 27 ЦППО 2 поступает заданное значение точности определения координат Δd. По третьему информационному входу в блок 22 со второго выхода второго вычислителя 16 поступает значение d". Значение d" рассчитывает блок 16 в соответствии с (5). В блоке 22 сравнивают значения d" и Δd. При выполнении неравенства  найденное значение
найденное значение  с первого выхода блока 22 поступает на выход устройства (шину 25). В противном случае начинается новый цикл уточнения координат.
с первого выхода блока 22 поступает на выход устройства (шину 25). В противном случае начинается новый цикл уточнения координат.
Синхронность работы элементов устройства обеспечивают импульсы тактового генератора 14.
Реализация второго разностно-дальномерного способа определения координат также может быть осуществлена с помощью устройства, представленного на фиг. 7. Особенностью его применения является наличие априорной информации о контролируемом районе, местоположении ЦППО 2 и NППП 1.n, n=1, 2, …, N, требованиях по ΔT и Δd. В этих условиях имеется возможность на подготовительном этапе задать оптимальное размещение на местности ЦППО 2 и NППП 1.n, размеры исходных элементарных объемов (их количество), элементарных объемов уточненных контролируемых районов (их количество), определить необходимое количество циклов оценивания координат (как правило, два или три) для минимизации временных затрат min ΔT при сохранении заданной точности OК Δd.
Возможность расчета на подготовительном этапе всех эталонных параметров: Mn, s, dn, d' - для первого цикла измерений в первом предлагаемом способе и  - для всех циклов измерений во втором предлагаемом способе, позволяет существенно снизить временные затраты на ОК ИРИ. Здесь dn - расстояние между ЦППО 2 и n-м ППП 1.n. Оптимизация пространственного размещения ЦППО 2 и NППП 1.n на этом этапе обеспечивает достижение более высоких точностей ОК ИРИ. Названные возможности достигаются благодаря увеличению объема памяти в блоках 18 и 19 (см. фиг. 7). Кроме того, благодаря определению на подготовительном этапе необходимого количества циклов детализации КР отпадает необходимость в блоке сравнения 22. В этом случае часть его функций (подсчет выполненных циклов измерений и формирование команды управления блоку 19) может быть возложена на блок 21. В остальном работа заявляемого устройства совпадает с вышеописанной по первому варианту РДСМО ИРИ.
- для всех циклов измерений во втором предлагаемом способе, позволяет существенно снизить временные затраты на ОК ИРИ. Здесь dn - расстояние между ЦППО 2 и n-м ППП 1.n. Оптимизация пространственного размещения ЦППО 2 и NППП 1.n на этом этапе обеспечивает достижение более высоких точностей ОК ИРИ. Названные возможности достигаются благодаря увеличению объема памяти в блоках 18 и 19 (см. фиг. 7). Кроме того, благодаря определению на подготовительном этапе необходимого количества циклов детализации КР отпадает необходимость в блоке сравнения 22. В этом случае часть его функций (подсчет выполненных циклов измерений и формирование команды управления блоку 19) может быть возложена на блок 21. В остальном работа заявляемого устройства совпадает с вышеописанной по первому варианту РДСМО ИРИ.
Реализация элементов предложенного устройства известна и трудностей не вызывает. Аналого-цифровые преобразователи 9.1-9.4 могут быть реализованы на микросхемах LTC 2208 производства Analog Devices.
Тракт анализа 12 предназначен для поиска на интервале времени Δt сигнала очередного фрейма, определении его границ и адреса пользователя  сравнении полученного адреса Fизм с заданным
сравнении полученного адреса Fизм с заданным  При их совпадении тракт 12 формирует управляющий сигнал для одновременного изъятия запомненного в блоках 13.1-13.4 сигнала во временных границах обнаруженного фрейма. Для этого с помощью демодулятора DBPSK сигналов 28 (см. фиг. 17) осуществляют операцию цифровой DBPSK демодуляции выборки сигнала длительностью Δt. Управляющий сигнал длительностью Δt на выполнение этой операции поступает на управляющий вход блока 28 с выхода блока управления 11. Демодулированный в блоке 28 сигнал a4(t) (совместно с недемодулированным
При их совпадении тракт 12 формирует управляющий сигнал для одновременного изъятия запомненного в блоках 13.1-13.4 сигнала во временных границах обнаруженного фрейма. Для этого с помощью демодулятора DBPSK сигналов 28 (см. фиг. 17) осуществляют операцию цифровой DBPSK демодуляции выборки сигнала длительностью Δt. Управляющий сигнал длительностью Δt на выполнение этой операции поступает на управляющий вход блока 28 с выхода блока управления 11. Демодулированный в блоке 28 сигнал a4(t) (совместно с недемодулированным  ) далее поступает на вход блока поиска и анализа заголовка PLCP 29. Здесь на основе a4(t) определяют начало фрейма, тип модуляции МАС-фрейма и его длительность. Значения границ обнаруженного фрейма с первого выхода блока 29 поступают на первый вход блока задания интервала измерений 31. Далее, в случае необходимости выполняют демодуляцию цифровой последовательности
) далее поступает на вход блока поиска и анализа заголовка PLCP 29. Здесь на основе a4(t) определяют начало фрейма, тип модуляции МАС-фрейма и его длительность. Значения границ обнаруженного фрейма с первого выхода блока 29 поступают на первый вход блока задания интервала измерений 31. Далее, в случае необходимости выполняют демодуляцию цифровой последовательности  с помощью блока 30 (с помощью демодулятора DQPSK сигналов), после чего анализируемый сигнал
с помощью блока 30 (с помощью демодулятора DQPSK сигналов), после чего анализируемый сигнал  следует на второй вход блока 32. Иначе, принятый цифровой сигнал a4(t) со второго выхода блока 29 напрямую поступает на первый вход блока анализа МАС-фрейма 32. Здесь определяют адрес пользователя Fизм, сравнивают его с заданным адресом
следует на второй вход блока 32. Иначе, принятый цифровой сигнал a4(t) со второго выхода блока 29 напрямую поступает на первый вход блока анализа МАС-фрейма 32. Здесь определяют адрес пользователя Fизм, сравнивают его с заданным адресом  поступившим по шине 23 ЦППО 2. В случае положительного решения
поступившим по шине 23 ЦППО 2. В случае положительного решения  на выходе блока 32 формируется управляющий сигнал, поступивший на второй вход блока 31. В этом случае на выходе последнего формируются значения границ (t*, t1) обнаруженного фрейма, которые в дальнейшем используют в качестве Δtизм. В противном случае, при несовпадении
на выходе блока 32 формируется управляющий сигнал, поступивший на второй вход блока 31. В этом случае на выходе последнего формируются значения границ (t*, t1) обнаруженного фрейма, которые в дальнейшем используют в качестве Δtизм. В противном случае, при несовпадении  блоком 32 формируется управляющий сигнал, с помощью которого обнуляется содержимое блока 31. В свою очередь блок 31 формирует управляющий сигнал, поступающий на входы управления блоков памяти 13.1-13.4 обнуляя их содержимое. Кроме того, этот же сигнал поступает на второй вход блока 11. В результате с помощью блока 11 осуществляют запуск нового цикла работы устройства (формирование прямоугольного импульса длительностью Δt).
блоком 32 формируется управляющий сигнал, с помощью которого обнуляется содержимое блока 31. В свою очередь блок 31 формирует управляющий сигнал, поступающий на входы управления блоков памяти 13.1-13.4 обнуляя их содержимое. Кроме того, этот же сигнал поступает на второй вход блока 11. В результате с помощью блока 11 осуществляют запуск нового цикла работы устройства (формирование прямоугольного импульса длительностью Δt).
Реализация демодулятора сигналов относительной (дифференциальной) двоичной фазовой манипуляции DBPSK 28 известна и трудностей не вызывает (см. Сигналы с двоичной фазовой манипуляцией (DBPSK). Дифференциальная BPSK (DBPSK). Теория и практика цифровой обработки сигналов. Электронный ресурс: http://www.dsplib.ru/content/bpsk/bpsk.html.).
Демодулятор сигналов дифференциальной квадратурной фазовой манипуляцией DQPSK 30 известен и трудностей не вызывает (см. Мелихов С.В. Методы манипуляции цифровой радиосвязи. Учебное пособие для студентов радиотехнических специальностей. - Томск: ТГУСУЗ, 2017. - 64 с.).
Блок анализа МАС-фрейма 32 предназначен для сравнения адреса текущего фрейма с заданным по шине 23. Представляет из себя блок сравнения, реализация которого трудностей не вызывает. Может быть реализован на элементарной логике микросхем ТТЛ-серии.
Блок задания интервала измерений Δtизм 31 предназначен для задания временных границ t* и t1 измерения пространственных параметров, заданного ИРИ (t*, t1) ∈ tизм. Измеренные в тракте 12 текущие значения (t*, t1) поступают на его выход (выход блока 31) в том случае, если на выходе блока 32 формируется управляющий сигнал, соответствующий совпадению  После завершения интервала Δtизм блоком 31 формируются управляющий сигнал, обнуляющий содержимое блоков 13.1-13.4. В противном случае, когда
После завершения интервала Δtизм блоком 31 формируются управляющий сигнал, обнуляющий содержимое блоков 13.1-13.4. В противном случае, когда  значение Δtзад на выход блока 31 не поступает, а на его выходе формируется управляющий сигнал, предназначенный для обнуления блоков 13.1-13.4 и перевод блока 11 в новое состояние. Реализация блока задания интервала измерений Δtизм 31 известно и трудностей не вызывает. Представляет из себя селектор (см. Рэд Э. Справочное пособие по высокочастотной схемотехнике. Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256 с.).
значение Δtзад на выход блока 31 не поступает, а на его выходе формируется управляющий сигнал, предназначенный для обнуления блоков 13.1-13.4 и перевод блока 11 в новое состояние. Реализация блока задания интервала измерений Δtизм 31 известно и трудностей не вызывает. Представляет из себя селектор (см. Рэд Э. Справочное пособие по высокочастотной схемотехнике. Схемы, блоки, 50-омная техника: Пер. с нем. - М.: Мир, 1990. - 256 с.).
Блок поиска и анализа заголовка PLCP 29 предназначен для определения начала фрейма, типа модуляции МАС-фрейма и его длительности. Эти функции блок 29 выполняет путем сравнения входного цифрового потока  с априорными данными, хранящимися в его постоянном запоминающем устройстве. В связи с тем, что в блоке 29 реализуется самая затратная по времени операция, которую необходимо выполнять в режиме реального времени, функции блока целесообразно выполнять с использованием программируемой логической интегральной схемы (ПЛИС) типа Virtex 5 XC5VSX50T. Алгоритм работы блока 29 приведен на фиг. 18. Совместно с блоком 29 на ПЛИС целесообразно реализовать блоки 28 и 30.
с априорными данными, хранящимися в его постоянном запоминающем устройстве. В связи с тем, что в блоке 29 реализуется самая затратная по времени операция, которую необходимо выполнять в режиме реального времени, функции блока целесообразно выполнять с использованием программируемой логической интегральной схемы (ПЛИС) типа Virtex 5 XC5VSX50T. Алгоритм работы блока 29 приведен на фиг. 18. Совместно с блоком 29 на ПЛИС целесообразно реализовать блоки 28 и 30.
Блок управления 11 предназначен для организации записи сигналов ИРИ в блоки памяти 13.1-13.4 «пакетами» заданной длительности At. Может быть выполнен из последовательно соединенных таймере и RS-триггере на элементной базе микросхем ТТЛ-серии.
Блоки памяти 13.1-13.4 реализуют по известным схемам (см. Большие интегральные схемы запоминающих устройств: Справочник / А.Ю. Горденов и др. - М.: Радио и связь, 1990. - 288 с.).
Построение генератора тактовых импульсов 14 известно и широко освещено в литературе (см. Тактовый генератор: устройство, принцип работы, применение. Электронный ресурс: http://fb.ru/article/452508/taktovyiy-generator-ustroystvo-printsip-rabotyi-primenenie).
Тракты 4.1-4.3, 5.1-5.3 и 8.1-8.4 реализуют аналогично соответствующим трактам прототипа.
Первый вычислитель 15 предназначен для расчета N взаимнокорреляционных функций Rn[τ] в соответствии с выражением (2). Для этого по четвертой входной шине 28 в блок 15 поступают координаты местоположения ППП 1.n (X, Y, Z)n, n=1, 2, 3; координаты ЦППО 2 (X, Y, Z)4, значение шага корреляции Δτ, соответствующие частоте дискретизации. На N+1 информационные входы блока 15 поступают анализируемые сигналы с выходов блоков памяти 13.1-13.N+1 (четырех). В блоке 15 дополнительно вычисляется значение границ временного сдвига т при нахождении ВКФ для каждой измерительной базы, расстояние между ЦППО 2 и ППП 1.n dn. Полученные результаты поступают на первый информационный вход второго вычислителя. Блок 15 может быть реализован на сигнальном процессоре TMSc 6416, алгоритм работы которого при реализации первого РДСМО ИРИ представлен на фиг. 19.
Второй вычислитель 16 предназначен для определения средних значений ВКФ  для каждого исходного элементарного объема в соответствии с (3) на интервале времени
для каждого исходного элементарного объема в соответствии с (3) на интервале времени  на первом этапе (цикле) работы устройства, определении средних значений ВКФ
на первом этапе (цикле) работы устройства, определении средних значений ВКФ  для каждого элементарного объема уточненного контролируемого района на интервале времени
для каждого элементарного объема уточненного контролируемого района на интервале времени  (втором цикле измерения координат) и при необходимости на третьем цикле измерений для нахождения
(втором цикле измерения координат) и при необходимости на третьем цикле измерений для нахождения  на интервале времени
на интервале времени  Для этого временной интервал s в блоке 16 определяют в соответствии с (4). Кроме того, в блоке 16 вычисляют длину d диагонали элементарного объема в соответствии с (5). Второй вычислитель может быть реализован на сигнальном процессоре TMSc 6416 совместно с блоком 15, а алгоритм его работы при реализации первого РДСМО ИРИ приведен на фиг. 20а, а второго - на фиг. 20б.
Для этого временной интервал s в блоке 16 определяют в соответствии с (4). Кроме того, в блоке 16 вычисляют длину d диагонали элементарного объема в соответствии с (5). Второй вычислитель может быть реализован на сигнальном процессоре TMSc 6416 совместно с блоком 15, а алгоритм его работы при реализации первого РДСМО ИРИ приведен на фиг. 20а, а второго - на фиг. 20б.
Реализация блоков 20-22 известна и сложностей не представляет. Могут быть реализованы на элементарной логике ТТЛ-серии микросхем, (см. Рэд Э. Справочное пособие по высокочастотной схемотехнике. Схемы, блоки, 50-омная техника. Пер. с нем. - М.: Мир. 1990. - 256 с.)
В случае использования аналоговых сигналов для определения координат ИРИ необходимость в блоках 9.1-9.3 отпадает. Принятые трактами 8.1-8.4 сигналы непосредственно поступают на информационные входы соответствующих блоков памяти 13.1-13.4. Блок 9.4 остается для обеспечения штатной работы тракта анализа 12.
Кроме того, определение координат заданного ИРИ, работающего в отличной от рассмотренной выше системе связи, например, GSM G2, предполагает использование тракта анализа 12 согласованной с ней структуры.
Блок формирования матрицы координат 19 при выполнении первого цикла измерений предназначен для деления заданного КР на исходные элементные объемы со сторонами а, b, с, определения координат центров исходных ЭО (Xi, Yj, Zk). На основе последних формирует объемную матрицу координат Р размерности А'×В'×С'. На втором этапе (цикле) работы устройства (блока 19) при реализации первого предложенного способа в его функции входит деление выбранного исходного ЭО с координатами центра (Xi, Yj, Zk) на равные по размерам уточненные ЭО со сторонами а', b', с'. Причем а >> а', b >> b', с >> с'. После этого блок 19 осуществляет поиск координат центров уточненных ЭО  На их основе формируется уточненная матрица координат
На их основе формируется уточненная матрица координат  размерности А"×В"×С". Если в работе устройства предусматривается еще один цикл уточнения координат, в блоке 19 по описанной выше последовательности действий определяются координаты центров ЭО
размерности А"×В"×С". Если в работе устройства предусматривается еще один цикл уточнения координат, в блоке 19 по описанной выше последовательности действий определяются координаты центров ЭО  и на их основе формируется матрица координат
и на их основе формируется матрица координат 
При реализации второго способа ОК ИРИ на втором цикле измерений блоком 19 формируется Н=А'×В'×С' матриц координат по числу исходных ЭО, а при реализации третьего цикла измерений количества формируемых матриц  составляет Н⋅L, где L=А"×В"×С".
составляет Н⋅L, где L=А"×В"×С".
Для выполнения названных функций на первый вход блока 19 по пятой входной шине 24 поступают координаты точек (X, Y, Z)A, (X, Y, Z)B, (X, Y, Z)C, (X, Y, Z)D, задающие КР, значения a, b, c, a', b', c'. При необходимости дополнительно поступают значения а", b" и с". На второй вход блока 19 поступают сигналы управления с первого выхода блока сравнения 22. Назначение последних состоит в переключении цикла работы блока 19. Алгоритм работы блока 19 при реализации первого способа ОК приведен на фиг. 21.
Блок формирования эталонных матриц 18 на первом цикле работы устройства предназначен для вычисления задержек прихода сигнала τl,j,k,n для n-й измерительной базы ЦППО - ПППn, n=1, 2, …, N, соответствующей каждой координате (Xi, Yj, Zk) и формирования на их основе N эталонных матриц Мn. На втором этапе (цикле) работы устройства функции блока 18 для первого и второго предложенных способов ОК ИРИ имеют отличия. При реализации первого способа ОК блок 18 формирует N уточненных эталонных матриц  размерности А'×В'×С', элементами которых является задержки
размерности А'×В'×С', элементами которых является задержки  При реализации второго способа ОК формируется N×Н уточненных эталонных матриц
При реализации второго способа ОК формируется N×Н уточненных эталонных матриц  Для выполнения функций блока 18 на его вход поступают значения матрицы (матриц) координат
Для выполнения функций блока 18 на его вход поступают значения матрицы (матриц) координат  В случае реализации трех циклов измерения координат во втором способе блоком 18 формируется N×Н×L эталонных матриц
В случае реализации трех циклов измерения координат во втором способе блоком 18 формируется N×Н×L эталонных матриц  Алгоритм работы блока 18 при реализации первого способа ОК приведен на фиг. 22. Блоки 18 и 19 целесообразно реализовать совместно с блоками 15 и 16 на одном сигнальном процессоре TMSc6416.
Алгоритм работы блока 18 при реализации первого способа ОК приведен на фиг. 22. Блоки 18 и 19 целесообразно реализовать совместно с блоками 15 и 16 на одном сигнальном процессоре TMSc6416.
| название | год | авторы | номер документа |
|---|---|---|---|
| Разностно-дальномерный способ определения местоположения объектов | 2022 |
|
RU2790347C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения | 2019 |
|
RU2717231C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения и устройство для его реализации | 2019 |
|
RU2719770C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения | 2021 |
|
RU2790348C1 |
| Способ определения координат радиолокационных станций контрбатарейной борьбы и устройство для его реализации | 2023 |
|
RU2826616C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения и устройство для его реализации | 2019 |
|
RU2704793C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2539968C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2014 |
|
RU2568104C1 |
| Способ определения координат источника радиоизлучения в трехмерном пространстве динамической системой радиоконтроля | 2019 |
|
RU2715422C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЗАИМНОЙ ЗАДЕРЖКИ МИНИМАЛЬНОГО ЧАСТОТНОГО СДВИГА (MSK) СИГНАЛОВ ПАКЕТНЫХ РАДИОСЕТЕЙ В РАЗНОСТНО-ДАЛЬНОМЕРНОЙ СИСТЕМЕ МЕСТООПРЕДЕЛЕНИЯ | 2020 |
|
RU2747108C1 |





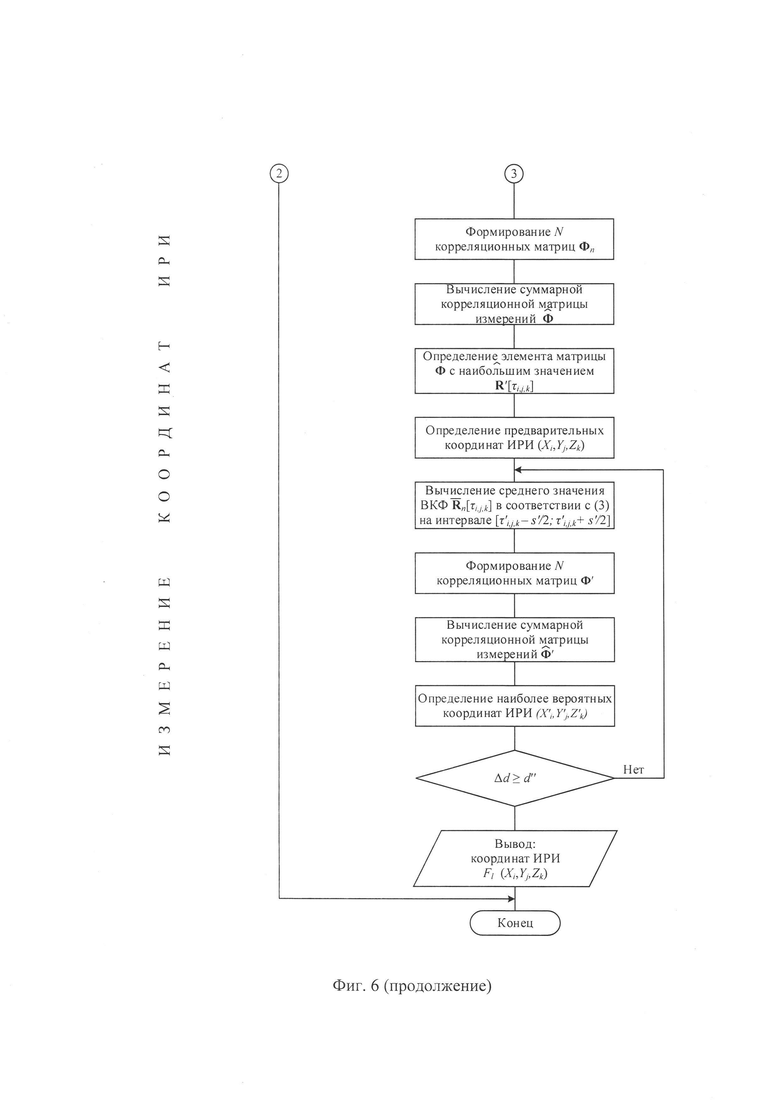





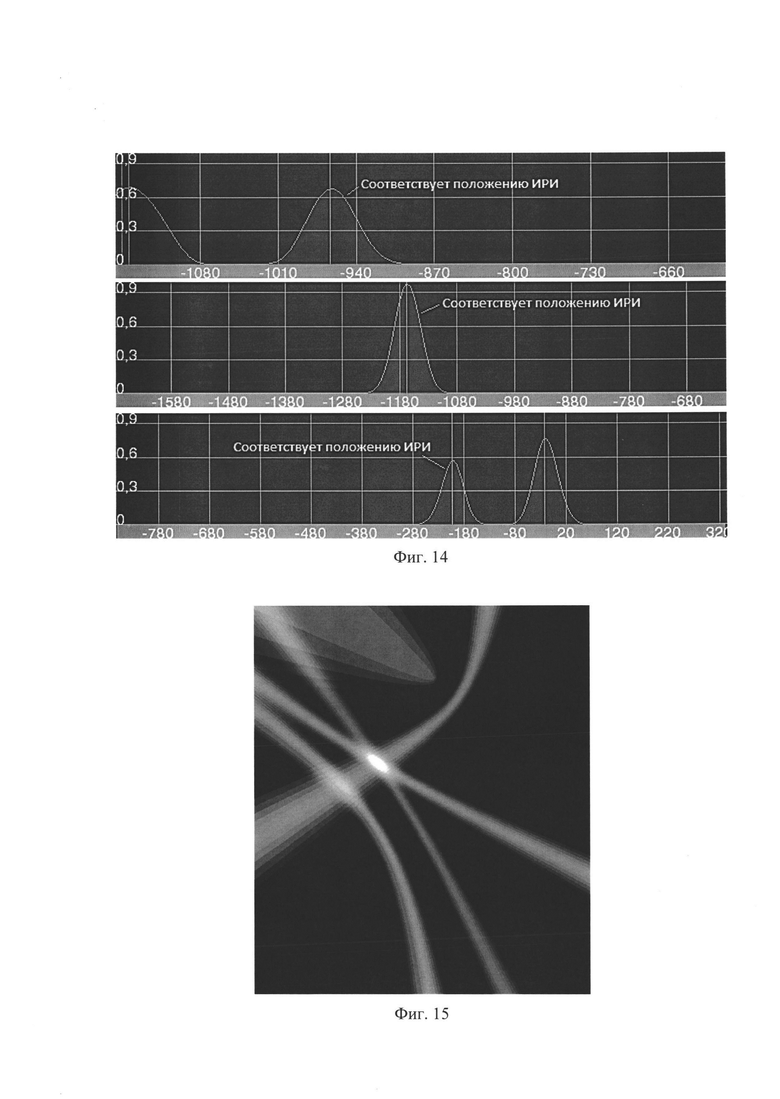
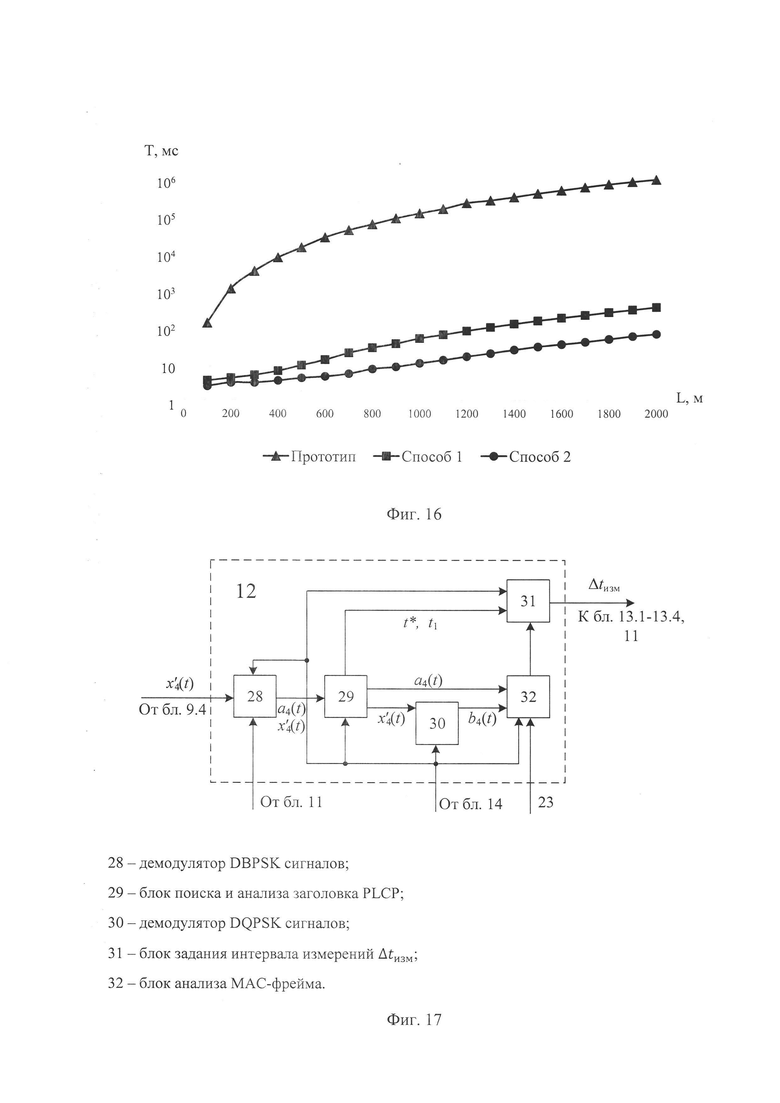
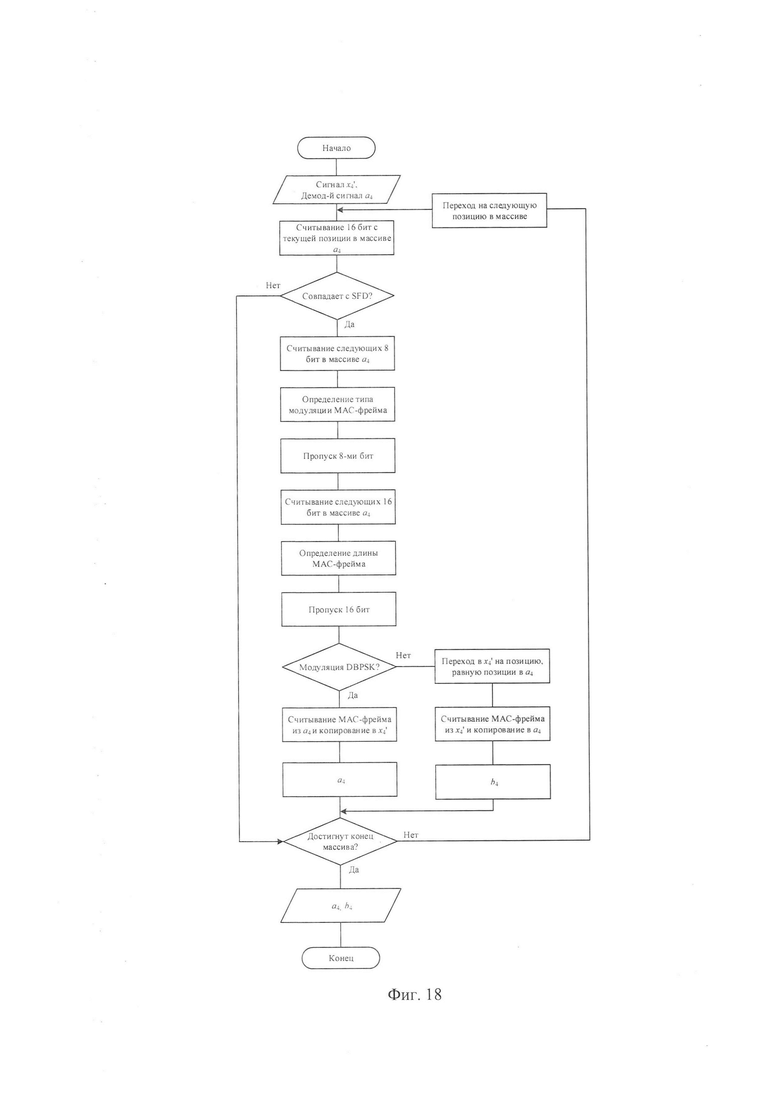





Группа изобретений относится к радиотехнике и может быть использована в многопозиционных радиотехнических системах для определения координат заданных источников радиоизлучения (ИРИ) с кодовым и временным разделением каналов. Достигаемый технический результат - сокращение временных затрат на определение местоположения заданного ИРИ при сохранении точностных характеристик в условиях многолучевости и работы на одной частоте нескольких ИРИ с временным или кодовым разделением каналов. Технический результат в первом разностно-дальномерном способе (РДС) достигается за счет того, что на подготовительном этапе контролируемый район (КР) разбивают на равные исходные элементарные объемы (ЭО) со сторонами а, b и с, определяют координаты центров исходных ЭО (Xi, Yj, Zk), на основе которых формируют объемную матрицу координат Р. Для каждого элемента (Xi, Yj, Zk) матрицы Р и всех N измерительных баз определяют эталонные значения разности времени прихода сигнала на центральный пункт приема и обработки (ЦППО) и n-й периферийный пункт приема (ПППn) τi,j,k,n. На их основе формируют N эталонных матриц Mn, n=1, 2, …, N, а в процессе работы вычисляют взаимнокорреляционную функцию (ВКФ) сигналов Rn[τ], принятых на n-м ППП и ЦППО и их средние значения  для каждого исходного ЭО на интервале времени
для каждого исходного ЭО на интервале времени  где s - время, за которое радиоволна проходит расстояние, равное диагонали исходного ЭО. Формируют N корреляционных матриц Фn путем замены τi,j,k,n на соответствующие им измеренные значения
где s - время, за которое радиоволна проходит расстояние, равное диагонали исходного ЭО. Формируют N корреляционных матриц Фn путем замены τi,j,k,n на соответствующие им измеренные значения  значения последних суммируют по всем N измерительным базам
значения последних суммируют по всем N измерительным базам  определяют предварительное местоположение ИРИ с координатами (Xi, Yj, Zk), соответствующее максимальному значению элемента матрицы измерений
определяют предварительное местоположение ИРИ с координатами (Xi, Yj, Zk), соответствующее максимальному значению элемента матрицы измерений  Задают уточненный КР со сторонами a, b и с и центром (Xi, Yj, Zk), делят уточненный КР на ЭО со сторонами а', b' и с', а' << a, b' << b, с' << с, определяют координаты их центров
Задают уточненный КР со сторонами a, b и с и центром (Xi, Yj, Zk), делят уточненный КР на ЭО со сторонами а', b' и с', а' << a, b' << b, с' << с, определяют координаты их центров  формируют уточненную матрицу координат Р' и N уточненных эталонных матриц
формируют уточненную матрицу координат Р' и N уточненных эталонных матриц  измеряют средние значения ВКФ
измеряют средние значения ВКФ  для каждого уточненного ЭО, формируют N уточненных корреляционных матриц
для каждого уточненного ЭО, формируют N уточненных корреляционных матриц  и уточненную матрицу измерений
и уточненную матрицу измерений  и определяют наиболее вероятные координаты заданного ИРИ, значение которых соответствует максимальному значению элемента уточненной матрицы измерений
и определяют наиболее вероятные координаты заданного ИРИ, значение которых соответствует максимальному значению элемента уточненной матрицы измерений  Положительный результат во втором РДС, улучшающий характеристики первого РДС, достигается благодаря определению необходимого количества этапов детализации КР, вычислению для них всех эталонных параметров
Положительный результат во втором РДС, улучшающий характеристики первого РДС, достигается благодаря определению необходимого количества этапов детализации КР, вычислению для них всех эталонных параметров  временных интервалов s, s' n s". Технический результат в устройстве достигается благодаря введению новых элементов в центральный пост обработки: второго вычислителя, блока формирования матрицы координат Р, блока формирования эталонных матриц Мn, сумматора, блока формирования корреляционных матриц Фn, блока принятия решения и блока сравнения с соответствующими связями. 3 н. и 2 з.п. ф-лы, 22 ил., 1 табл.
временных интервалов s, s' n s". Технический результат в устройстве достигается благодаря введению новых элементов в центральный пост обработки: второго вычислителя, блока формирования матрицы координат Р, блока формирования эталонных матриц Мn, сумматора, блока формирования корреляционных матриц Фn, блока принятия решения и блока сравнения с соответствующими связями. 3 н. и 2 з.п. ф-лы, 22 ил., 1 табл.
1. Разностно-дальномерный способ определения координат источника радиоизлучения (ИРИ), основанный на приеме сигналов пространственно разнесенными периферийными пунктами приема (ППП) с известными координатами, связанными с центральным пунктом приема и обработки (ЦППО) командными линиями связи и линиями аналоговой ретрансляции сигнала, причем командными линиями связи с ЦППО на ППП передают команды настройки на частоту сигнала ИРИ, а по линиям аналоговой ретрансляции принятые в ППП сигналы ИРИ передают на ЦППО, на котором одновременно на интервале Δt запоминают сигналы ИРИ, принятые в ЦППО и во всех N ППП, демодулируют принятые в ЦППО сигналы ИРИ, на основе анализа полученного битового массива данных осуществляют поиск и анализ преамбулы и заголовка PLCP текущего фрейма, определяют начало МАС-фрейма, его длительность Δtϕj и адрес пользователя, сравнивают полученный адрес с заданным для поиска, при их совпадении на интервале времени от начала преамбулы PLCP до конца соответствующего МАС-фрейма измеряют разность времени приема ретранслированных сигналов τn в ЦППО и ППП, где n ∈ 1, 2, …, N - номера ППП и измерительных баз ЦППО-ПППn, на основе которых определяют координаты ИРИ, отличающийся тем, что на ЦППО на подготовительном этапе в виде прямоугольного параллелепипеда задают контролируемый район (КР) и вводят систему координат с началом в одной из его вершин, с осями 0х, 0у и 0z, направленными вдоль граней, примыкающих к выбранной вершине, которые обозначают через А, В и С соответственно, КР делят на исходные элементарные объемы со сторонами а, b и с по осям 0х, 0у и 0z соответственно, объем которых выбирают исходя из заданных временных затрат и точности Δd определения координат ИРИ, определяют координаты центров исходных элементарных объемов (Xi, Yj, Zk), на основе которых формируют объемную матрицу координат Р размерности А'×В'×С', где Xi=ai, i=1, 2, …, А/а=A', Yj=bj, j=1, 2, …, B/b=В', Zk=ck, k=1, 2, …, С/c=С', для каждого элемента (Xi, Yj, Zk) матрицы координат Р всех N измерительных баз определяют эталонные значения разности времени прихода сигнала на ЦППО и ПППn τi,j,k,n, формируют N эталонных матриц Mn, n=1, 2, …, N, элементами каждой из которых являются соответствующие координатам (Xi, Yj, Zk) эталонные значения задержки прихода сигналов τi,j,k,n для n-й измерительной базы ЦППО-ПППn, а в процессе работы для учета разности времени приема сигнала вычисляют взаимнокорреляционную функцию (ВКФ) сигналов Rn[τ], принятых на n-м ППП, n=1, 2, …, N, и на ЦППО, для значений временного сдвига в интервале τ ∈ (-с*-1 dn, с*-1 dn), где с* - скорость света, dn - расстояние между ЦППО и n-м ППП, с заданным шагом Δτ, соответствующим частоте дискретизации сигнала, и их среднее значение  для каждого исходного элементарного объема контролируемого района на интервале времени
для каждого исходного элементарного объема контролируемого района на интервале времени  где s - время, за которое радиоволна проходит расстояние, равное диагонали исходного элементарного объема, на основе N эталонных матриц Mn формируют корреляционные матрицы Фn путем замены значений задержки τi,j,k,n на соответствующие им измеренные средние значения ВКФ
где s - время, за которое радиоволна проходит расстояние, равное диагонали исходного элементарного объема, на основе N эталонных матриц Mn формируют корреляционные матрицы Фn путем замены значений задержки τi,j,k,n на соответствующие им измеренные средние значения ВКФ  значения матриц Фn, n=1, 2, …, N, суммируют по всем N измерительным базам
значения матриц Фn, n=1, 2, …, N, суммируют по всем N измерительным базам  за предварительное местоположение ИРИ принимают координаты точки (Xi, Yj, Zk), соответствующей максимальному значению элемента матрицы измерений
за предварительное местоположение ИРИ принимают координаты точки (Xi, Yj, Zk), соответствующей максимальному значению элемента матрицы измерений  задают уточненный контролируемый район в виде прямоугольного параллелепипеда с границами, соответствующими границам выбранного исходного элементарного объема со сторонами а, b и с и центром с координатами (Xi, Yj, Zk), делят уточненный контролируемый район на элементарные объемы со сторонами, а', b' и с', a'<<а, b'<<b, с'<<с, определяют координаты центров уточнения элементарных объемов
задают уточненный контролируемый район в виде прямоугольного параллелепипеда с границами, соответствующими границам выбранного исходного элементарного объема со сторонами а, b и с и центром с координатами (Xi, Yj, Zk), делят уточненный контролируемый район на элементарные объемы со сторонами, а', b' и с', a'<<а, b'<<b, с'<<с, определяют координаты центров уточнения элементарных объемов  на основе которых формируют объемную матрицу уточненных координат Р' размерности А"×В"×С", где
на основе которых формируют объемную матрицу уточненных координат Р' размерности А"×В"×С", где 

 для каждого элемента
для каждого элемента  уточненной матрицы координат Р' всех N измерительных баз определяют эталонные значения разности времени прихода сигналов на ЦППО и ПППn
уточненной матрицы координат Р' всех N измерительных баз определяют эталонные значения разности времени прихода сигналов на ЦППО и ПППn  формируют N уточненных эталонных матриц
формируют N уточненных эталонных матриц  элементами каждой из которых являются соответствующие координатам
элементами каждой из которых являются соответствующие координатам  эталонные значения задержки прихода сигналов
эталонные значения задержки прихода сигналов  вычисляют средние значения ВКФ
вычисляют средние значения ВКФ  для каждого элементарного объема уточненного контролируемого района на интервале времени
для каждого элементарного объема уточненного контролируемого района на интервале времени  где s' - время, за которое радиоволна проходит расстояние, равное диагонали элементарного объема уточненного контролируемого района, формируют N уточненных корреляционных матриц
где s' - время, за которое радиоволна проходит расстояние, равное диагонали элементарного объема уточненного контролируемого района, формируют N уточненных корреляционных матриц  путем замены значений задержки
путем замены значений задержки  на соответствующие средние значения ВКФ
на соответствующие средние значения ВКФ  значения матриц
значения матриц  суммируют по всем N измерительным базам, а за наиболее вероятное местоположение ИРИ принимают координаты точки
суммируют по всем N измерительным базам, а за наиболее вероятное местоположение ИРИ принимают координаты точки  соответствующей максимальному значению элемента уточненной матрицы измерений
соответствующей максимальному значению элемента уточненной матрицы измерений  сравнивают размеры половины длины диагонали элементарного объема уточненного контролируемого района
сравнивают размеры половины длины диагонали элементарного объема уточненного контролируемого района  с заданной точностью определения координат Δd, при выполнении неравенства
с заданной точностью определения координат Δd, при выполнении неравенства  обнаруженному ИРИ присваивают координаты
обнаруженному ИРИ присваивают координаты  в противном случае начинают новый цикл уточнения координат ИРИ.
в противном случае начинают новый цикл уточнения координат ИРИ.
2. Разностно-дальномерный способ определения координат источника радиоизлучения (ИРИ), основанный на приеме сигналов пространственно разнесенными периферийными пунктами приема (ППП) с известными координатами, связанными с центральным пунктом приема и обработки (ЦППО) командными линиями связи и линиями аналоговой ретрансляции сигнала, причем командными линиями связи с ЦППО на ППП передают команды настройки на частоту сигнала ИРИ, а по линиям аналоговой ретрансляции принятые в ППП сигналы ИРИ передают на ЦППО, на котором одновременно на интервале Δt запоминают сигналы ИРИ, принятые в ЦППО и во всех NППП, демодулируют принятые в ЦППО сигналы ИРИ, на основе анализа полученного битового массива данных осуществляют поиск и анализ преамбулы и заголовка PLCP текущего фрейма, определяют начало МАС-фрейма, его длительность  и адрес пользователя, сравнивают полученный адрес с заданным для поиска, при их совпадении на интервале времени от начала преамбулы PLCP до конца соответствующего МАС-фрейма измеряют разность времени приема ретранслированных сигналов τn в ЦППО и ППП, где n ∈ 1, 2, …, N - номера ППП и измерительных баз ЦППО-ПППn, на основе которых определяют координаты ИРИ, отличающийся тем, что на ЦППО на подготовительном этапе в виде прямоугольного параллелепипеда задают контролируемый район (КР) и вводят систему координат с началом в одной из его вершин, с осями 0х, 0у и 0z, направленными вдоль граней, примыкающих к выбранной вершине, которые обозначают через А, В и С соответственно, КР делят на исходные элементарные объемы со сторонами а, b и с по осям 0х, 0у и 0z соответственно, объем которых выбирают исходя из заданных временных затрат и точности Δd определения координат ИРИ, определяют координаты центров исходных элементарных объемов (Xi, Yj, Zk), на основе которых формируют объемную матрицу координат Р размерности А'×В'×С', где Xi=ai, i=1, 2, …, А/а=A', Yj=bj, j=1, 2, …, B/b=В', Zk=ck, k=1, 2, …, C/с=С', для каждого элемента (Xi, Yj, Zk) матрицы координат Р всех N измерительных баз определяют эталонные значения разности времени прихода сигнала на ЦППО и ПППn τi,j,k,n, формируют N эталонных матриц Мn, n=1, 2, …, N, элементами каждой из которых являются соответствующие координатам (Xi, Yj, Zk) эталонные значения задержки прихода сигналов τi,j,k,n для n-й измерительной базы ЦППО-ПППn, в каждом исходном элементарном объеме задают А"×В"×С" равных по размерам уточненных элементарных объемов путем их деления на прямоугольные параллелепипеды со сторонами а', b' и с', а'<<а, b'<<b, с'<<с, определяют координаты центров уточненных элементарных объемов
и адрес пользователя, сравнивают полученный адрес с заданным для поиска, при их совпадении на интервале времени от начала преамбулы PLCP до конца соответствующего МАС-фрейма измеряют разность времени приема ретранслированных сигналов τn в ЦППО и ППП, где n ∈ 1, 2, …, N - номера ППП и измерительных баз ЦППО-ПППn, на основе которых определяют координаты ИРИ, отличающийся тем, что на ЦППО на подготовительном этапе в виде прямоугольного параллелепипеда задают контролируемый район (КР) и вводят систему координат с началом в одной из его вершин, с осями 0х, 0у и 0z, направленными вдоль граней, примыкающих к выбранной вершине, которые обозначают через А, В и С соответственно, КР делят на исходные элементарные объемы со сторонами а, b и с по осям 0х, 0у и 0z соответственно, объем которых выбирают исходя из заданных временных затрат и точности Δd определения координат ИРИ, определяют координаты центров исходных элементарных объемов (Xi, Yj, Zk), на основе которых формируют объемную матрицу координат Р размерности А'×В'×С', где Xi=ai, i=1, 2, …, А/а=A', Yj=bj, j=1, 2, …, B/b=В', Zk=ck, k=1, 2, …, C/с=С', для каждого элемента (Xi, Yj, Zk) матрицы координат Р всех N измерительных баз определяют эталонные значения разности времени прихода сигнала на ЦППО и ПППn τi,j,k,n, формируют N эталонных матриц Мn, n=1, 2, …, N, элементами каждой из которых являются соответствующие координатам (Xi, Yj, Zk) эталонные значения задержки прихода сигналов τi,j,k,n для n-й измерительной базы ЦППО-ПППn, в каждом исходном элементарном объеме задают А"×В"×С" равных по размерам уточненных элементарных объемов путем их деления на прямоугольные параллелепипеды со сторонами а', b' и с', а'<<а, b'<<b, с'<<с, определяют координаты центров уточненных элементарных объемов  на основе которых формируют А'×В'×С'=Н объемных матриц координат
на основе которых формируют А'×В'×С'=Н объемных матриц координат  h=1, 2, …, Н, размерности А"×В"×С", где А"=а/а', В"=b/b', С"=с/с', для каждого элемента
h=1, 2, …, Н, размерности А"×В"×С", где А"=а/а', В"=b/b', С"=с/с', для каждого элемента  уточненных матриц координат
уточненных матриц координат  h=1, 2, …, H, и всех N измерительных баз определяют эталонные значения разности времени прихода сигналов на ЦППО и ПППn
h=1, 2, …, H, и всех N измерительных баз определяют эталонные значения разности времени прихода сигналов на ЦППО и ПППn  формируют N×Н уточненных эталонных матриц
формируют N×Н уточненных эталонных матриц  элементами каждой из которых являются соответствующие координатам
элементами каждой из которых являются соответствующие координатам  эталонные значения задержки прихода сигнала
эталонные значения задержки прихода сигнала  для n-й измерительной базы, сравнивают размеры половины длины диагонали элементарного объема уточненного контролируемого района
для n-й измерительной базы, сравнивают размеры половины длины диагонали элементарного объема уточненного контролируемого района  с заданной точностью определения координат Δd, при выполнении неравенства
с заданной точностью определения координат Δd, при выполнении неравенства  завершают подготовительный этап, в противном случае начинают новый цикл детализации каждого уточненного контролируемого района и формирования соответствующих дополнительных эталонных матриц
завершают подготовительный этап, в противном случае начинают новый цикл детализации каждого уточненного контролируемого района и формирования соответствующих дополнительных эталонных матриц  а в процессе работы для измерения разности времени приема сигналов вычисляют взаимнокорреляционную функцию (ВКФ) сигналов Rn[τ], принятых на n-м ППП, n=1, 2, …, N, и на ЦППО, для значений временного сдвига в интервале τ ∈ (-с*-1 dn, с*-1 dn), где с* - скорость света, dn - расстояние между ЦППО и n-м ППП, с заданным шагом Δt, соответствующим частоте дискретизации сигнала, и их среднее значение
а в процессе работы для измерения разности времени приема сигналов вычисляют взаимнокорреляционную функцию (ВКФ) сигналов Rn[τ], принятых на n-м ППП, n=1, 2, …, N, и на ЦППО, для значений временного сдвига в интервале τ ∈ (-с*-1 dn, с*-1 dn), где с* - скорость света, dn - расстояние между ЦППО и n-м ППП, с заданным шагом Δt, соответствующим частоте дискретизации сигнала, и их среднее значение  для каждого исходного элементарного объема контролируемого района на интервале времени
для каждого исходного элементарного объема контролируемого района на интервале времени  где s - время, за которое радиоволна проходит расстояние, равное диагонали исходного элементарного объема, на основе N эталонных матриц Mn формируют корреляционные матрицы Фn путем замены значений задержки τi,j,k,n на соответствующие им измеренные средние значения ВКФ
где s - время, за которое радиоволна проходит расстояние, равное диагонали исходного элементарного объема, на основе N эталонных матриц Mn формируют корреляционные матрицы Фn путем замены значений задержки τi,j,k,n на соответствующие им измеренные средние значения ВКФ  значения матриц Фn, n=1, 2, …, N, суммируют по всем N измерительным базам
значения матриц Фn, n=1, 2, …, N, суммируют по всем N измерительным базам  за предварительное местоположение ИРИ принимают координаты точки (Xi, Yj, Zk), соответствующей максимальному значению элемента матрицы измерений
за предварительное местоположение ИРИ принимают координаты точки (Xi, Yj, Zk), соответствующей максимальному значению элемента матрицы измерений  задают уточненный контролируемый район в виде прямоугольного параллелепипеда с границами, соответствующими границам выбранного исходного элементарного объема со сторонами а, b и с и центром с координатами (Xi, Yj, Zk), вычисляют средние значения ВКФ
задают уточненный контролируемый район в виде прямоугольного параллелепипеда с границами, соответствующими границам выбранного исходного элементарного объема со сторонами а, b и с и центром с координатами (Xi, Yj, Zk), вычисляют средние значения ВКФ  для каждого h-гo элементарного объема уточненного контролируемого района на интервале времени
для каждого h-гo элементарного объема уточненного контролируемого района на интервале времени  где s' - время, за которое радиоволна проходит расстояние, равное диагонали элементарного объема уточненного контролируемого района, формируют N уточненных корреляционных матриц
где s' - время, за которое радиоволна проходит расстояние, равное диагонали элементарного объема уточненного контролируемого района, формируют N уточненных корреляционных матриц  путем замены элементов задержки
путем замены элементов задержки  на соответствующие средние значения ВКФ
на соответствующие средние значения ВКФ  значения матриц
значения матриц  суммируют по всем N измерительным базам, а за уточненное местоположение ИРИ принимают координаты точки
суммируют по всем N измерительным базам, а за уточненное местоположение ИРИ принимают координаты точки  соответствующей максимальному значению элемента уточненной матрицы измерений
соответствующей максимальному значению элемента уточненной матрицы измерений  в случае отсутствия дальнейшей детализации контролируемого района, выполненного на подготовительном этапе, уточненное значение координат точки
в случае отсутствия дальнейшей детализации контролируемого района, выполненного на подготовительном этапе, уточненное значение координат точки  принимают за наиболее вероятные координаты обнаруженного ИРИ.
принимают за наиболее вероятные координаты обнаруженного ИРИ.
3. Способ по п. 1 или 2, отличающийся тем, что среднее значение ВКФ  на интервале
на интервале  следовательно, соответствующее этой точке, определяют из выражения
следовательно, соответствующее этой точке, определяют из выражения

4. Способ по п. 1 или 2, отличающийся тем, что время s, за которое радиоволна проходит расстояние, равное длине диагонали элементарного объема контролируемого района, равна

5. Устройство определения координат источника радиоизлучения (ИРИ) разностно-дальномерным способом, содержащее N периферийных пунктов приема (ППП) и центральный пункт приема и обработки (ЦППО), причем каждый ППП состоит из последовательно соединенных тракта приема радиосигналов и тракта ретрансляции радиосигналов, а ЦППО содержит радиопередатчик, предназначенный для реализации командной линии связи, N+1 трактов приема радиосигналов и центральный пост обработки (ЦПО), выход которого является выходной шиной ЦППО, причем N+1 информационных входов ЦПО соединены с выходами соответствующих трактов приема сигналов, первая входная шина ЦППО является входом управления радиопередатчиком и соединена с входами управления трактов приема радиосигналов ЦППО, предназначена для задания частоты настройки ƒн трактов приема радиосигналов, а центральный пост обработки выполнен содержащим N+1 аналогово-цифровых преобразователей, входы которых являются соответственно N+1 информационными входами ЦПО, N+1 блоков памяти, группы информационных входов которых соединены с выходами соответствующих аналого-цифровых преобразователей, блок управления, предназначенный для задания длительности интервала анализа Δt и его начала t', тракт анализа, предназначенный для определения начала очередного фрейма t*, его длительности Δtp, вида модуляции МАС-фрейма и его демодуляции, определения адреса текущего пользователя F, второй вход которого является вторым установочным входом ЦПО и третьей входной шиной ЦППО, предназначенной для задания адреса пользователя Fl, первый информационный вход тракта анализа соединен с выходом N+1-го аналого-цифрового преобразователя, а выход объединен с первыми входами управления N+1 блоков памяти и вторым входом блока управления, первый вход которого является первым установочным входом ЦПО и второй входной шиной ЦППО, предназначенной для задания в процессе работы интервала анализа Δt и его начала t', а выход соединен со вторыми входами управления блоков памяти и третьим входом тракта анализа, генератор тактовых импульсов, выход которого соединен с входами синхронизации N+1 аналого-цифровых преобразователей, блока управления и тракта анализа, отличающееся тем, что в ЦПО дополнительно введены первый вычислитель, предназначенный для нахождения взаимнокорреляционной функции (ВКФ) сигналов Rn[τ], принятых на n-м ППП, n=1, 2, …, N, и на ЦППО, для значений временного сдвига в интервале τ ∈ (-c*-1dn, c*-1dn), где с* - скорость света, dn - расстояние между ЦППО и n-м ППП, с заданным шагом Δτ, группа из N+1 входов первого вычислителя соединена с информационными выходами соответствующих N+1 блоков памяти, второй вычислитель, предназначенный для нахождения среднего значения ВКФ  первый информационный вход которого соединен с информационным выходом первого вычислителя, четвертая входная шина ЦППО, предназначена для задания координат ППП (X, Y, Z)n и ЦППО {X, Y, Z}4, соединена с N+2 входом первого вычислителя и является третьим установочным входом ЦПО, последовательно соединенные блок формирования матрицы координат Р, предназначенный для определения координат центров исходных элементарных объемов (Xi, Yj, Zk) контролируемого района и формирования на их основе матрицы координат Р, блок формирования эталонных матриц Мn, предназначенный для вычислений задержек прихода сигнала τi,j,k,n для n-й измерительной базы ЦППО-ПППn, n=1, 2, …, N, соответствующей каждой координате (Xi, Yj, Zk), и формирования на их основе N эталонных матриц Мn, блок формирования корреляционных матриц Фn, предназначенный для формирования N корреляционных матриц Фn, элементами которых являются средние значения ВКФ
первый информационный вход которого соединен с информационным выходом первого вычислителя, четвертая входная шина ЦППО, предназначена для задания координат ППП (X, Y, Z)n и ЦППО {X, Y, Z}4, соединена с N+2 входом первого вычислителя и является третьим установочным входом ЦПО, последовательно соединенные блок формирования матрицы координат Р, предназначенный для определения координат центров исходных элементарных объемов (Xi, Yj, Zk) контролируемого района и формирования на их основе матрицы координат Р, блок формирования эталонных матриц Мn, предназначенный для вычислений задержек прихода сигнала τi,j,k,n для n-й измерительной базы ЦППО-ПППn, n=1, 2, …, N, соответствующей каждой координате (Xi, Yj, Zk), и формирования на их основе N эталонных матриц Мn, блок формирования корреляционных матриц Фn, предназначенный для формирования N корреляционных матриц Фn, элементами которых являются средние значения ВКФ  соответствующие задержкам сигнала τi,j,k,n в элементах эталонных матриц Мn, сумматор, предназначенный для формирования матрицы измерений
соответствующие задержкам сигнала τi,j,k,n в элементах эталонных матриц Мn, сумматор, предназначенный для формирования матрицы измерений  блок принятия решения, предназначенный для определения элемента матрицы измерений
блок принятия решения, предназначенный для определения элемента матрицы измерений  с максимальным значением средней взаимнокорреляционной функции
с максимальным значением средней взаимнокорреляционной функции  величина которой соответствует наиболее вероятному местоположению ИРИ с координатами (Xi, Yj, Zk), блок сравнения, первый информационный вход которого соединен с информационным выходом блока принятия решения, второй информационный вход является шестой входной шиной ЦППО и пятым установочным входом ЦПО, предназначенный для задания точности определения координат Δd, третий информационный вход соединен со вторым информационным выходом второго вычислителя, первый информационный выход блока сравнения соединен со вторым входом блока формирования матрицы координат Р, а второй информационный выход блока сравнения является выходом ЦПО и выходной шиной ЦППО, пятая входная шина которого предназначена для задания границ контролируемого района с помощью координат точек (X, Y, Z)A, (X, Y, Z)B, (X, Y, Z)C, (X, Y, Z)D, размеров элементарных объемов а, b, с, а', b', с' различных уровней, соединена с первым входом блока формирования матрицы координат Р и является четвертым установочным входом ЦПО, а вход блока формирования эталонных матриц Мn объединен с вторым входом блока принятия решения, входы синхронизации блока формирования эталонных матриц Мn, блока формирования матрицы координат Р, блока формирования корреляционных матриц Фn, сумматора, блока принятия решения, первого и второго вычислителей соединены с выходом тактового генератора, а информационный выход второго вычислителя соединен со вторым информационным входом блока формирования корреляционных матриц Фn.
величина которой соответствует наиболее вероятному местоположению ИРИ с координатами (Xi, Yj, Zk), блок сравнения, первый информационный вход которого соединен с информационным выходом блока принятия решения, второй информационный вход является шестой входной шиной ЦППО и пятым установочным входом ЦПО, предназначенный для задания точности определения координат Δd, третий информационный вход соединен со вторым информационным выходом второго вычислителя, первый информационный выход блока сравнения соединен со вторым входом блока формирования матрицы координат Р, а второй информационный выход блока сравнения является выходом ЦПО и выходной шиной ЦППО, пятая входная шина которого предназначена для задания границ контролируемого района с помощью координат точек (X, Y, Z)A, (X, Y, Z)B, (X, Y, Z)C, (X, Y, Z)D, размеров элементарных объемов а, b, с, а', b', с' различных уровней, соединена с первым входом блока формирования матрицы координат Р и является четвертым установочным входом ЦПО, а вход блока формирования эталонных матриц Мn объединен с вторым входом блока принятия решения, входы синхронизации блока формирования эталонных матриц Мn, блока формирования матрицы координат Р, блока формирования корреляционных матриц Фn, сумматора, блока принятия решения, первого и второго вычислителей соединены с выходом тактового генератора, а информационный выход второго вычислителя соединен со вторым информационным входом блока формирования корреляционных матриц Фn.
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2539968C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЗАИМНОЙ ЗАДЕРЖКИ MSK СИГНАЛОВ ПАКЕТНЫХ РАДИОСЕТЕЙ В РАЗНОСТНО-ДАЛЬНОМЕРНОЙ СИСТЕМЕ МЕСТООПРЕДЕЛЕНИЯ | 2016 |
|
RU2623094C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения и реализующее его устройство | 2018 |
|
RU2670142C1 |
| Разностно-дальномерный способ определения местоположения источника радиоизлучения в условиях многолучевого распространения радиоволн | 2019 |
|
RU2714303C1 |
| Способ определения местоположения подвижного источника радиоизлучения, передающего свои координаты с неизвестным смещением, двухпозиционной системой с высокодинамичным измерительным пунктом | 2018 |
|
RU2677852C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2012 |
|
RU2521084C1 |
| EP 3505947 A1, 03.07.2019 | |||
| WO 2011160698 A1, 29.12.2011 | |||
| JPH 07146352 A, 06.06.1995 | |||
| US 9702960 B2, 11.07.2017 | |||
| US 5999129 A, 07.12.1999. | |||

