ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к рукоятке управления для медицинских устройств, в частности к рукоятке управления с механизмами для управления множеством проволок натяжения.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Электродные катетеры широко применяются в медицинской практике в течение многих лет. Они используются для стимуляции и картирования электрической активности сердца, а также для абляции участков нарушенной электрической активности. Фибрилляция предсердий является распространенным длительным нарушением ритма сердца и основной причиной инсульта. Это заболевание характеризуется наличием возвратных импульсов, распространяющихся в предсердной ткани. Существуют различные способы прерывания этих импульсов, в том числе атриотомия, выполняемая хирургическим путем или путем катетеризации. Перед тем как приступить к лечению заболевания, прежде всего необходимо выявить участок прохождения импульсов. Известны различные способы такого выявления, в том числе с применением катетеров с узлом картирования, выполненным с возможностью измерения активности внутри легочной вены, венечного синуса или иной трубчатой структуры по внутренней окружности структуры. Один из таких узлов картирования имеет трубчатую конструкцию, содержащую по существу цилиндрическую основную часть, расположенную по существу перпендикулярно и дистально относительно корпуса катетера и имеющую наружную окружность, и по существу прямую дистальную часть, расположенную дистально относительно основной части. Трубчатая конструкция снабжена изолирующим покрытием, покрывающим по меньшей мере основную часть узла картирования. Опорный элемент, выполненный из материала с эффектом запоминания формы, размещен по меньшей мере внутри основной части узла картирования. По существу цилиндрическая основная часть узла картирования включает множество пар электродов, каждая из которых содержит два кольцевых электрода.
На практике электродный катетер вводится в интродьюсер, расположенный в основной вене или артерии, например, в бедренной артерии, и направляется в камеру сердца. Внутри камеры катетер выходит за пределы дистального конца интродьюсера, открывая узел картирования. Перемещением катетера управляют посредством движений, включающих отклонения дистальной части катетера; таким образом, узел картирования располагают в трубчатом участке камеры сердца. Возможность контролировать точное положение и направление катетера, а также сама конструкция узла картирования играют важную роль, во многом определяя общую пользу применения катетера.
Управляемые катетеры, по существу, хорошо известны специалистам. Например, в патенте США № Re 34502 описан катетер с рукояткой управления, содержащей корпус с поршневой камерой на дистальном конце. В поршневой камере установлен поршень, который может перемещаться в продольном направлении. К поршню прикреплен проксимальный конец удлиненного корпуса катетера. К корпусу прикреплена проволока натяжения, проходящая через поршень, корпус катетера и в секцию наконечника на дистальном конце корпуса катетера. Дистальный конец проволоки натяжения закреплен в секции наконечника катетера. В такой конструкции продольное перемещение поршня относительно корпуса приводит к отклонению секции наконечника катетера.
Описанный в патенте США № RE 34502 промышленный образец по существу ограничен катетером с одной проволокой натяжения. Если требуется двунаправленное отклонение секции наконечника катетера, необходимо более одной проволоки натяжения. Более того, если требуется большая управляемость катетером, например, возможность сжатия узла картирования, необходима дополнительная проволока натяжения. Таким образом, существует необходимость в рукоятке управления, способной обеспечить управление несколькими проволоками натяжения при помощи механизмов, занимающих минимальное пространство внутри рукоятки управления и имеющих конструкцию, легко приспосабливаемую к существующим рукояткам управления.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к рукоятке управления медицинским устройством или катетерами. По мере того как медицинские устройства, в особенности электрофизиологические катетеры, становятся все более сложными и включают все большее число управляемых компонентов, возникает необходимость в рукоятке управления, которая может обеспечивать независимое управление множеством проволок натяжения. Рукоятка управления, составляющая предмет настоящего изобретения, содержит приводной диск, приводной рычаг и приводное кольцо для приведения в действие трех различных проволок натяжения, управляющих различными элементами медицинского устройства независимо друг от друга.
В одном варианте осуществления рукоятка управления имеет корпус, узел отклонения, имеющий ручку отклонения и роликовый рычаг, соединенные с отклоняющей (отклоняющими) проволокой (проволоками) натяжения для отклонения части медицинского устройства в ответ на вращение ручки отклонения пользователем. Рукоятка управления также имеет приводной диск, имеющий общую с узлом отклонения ось вращения, поскольку приводной диск установлен на части роликового рычага, однако он может вращаться независимо от роликового рычага. Приводной диск имеет язычок, выступающий через отверстие в корпусе рукоятки управления, благодаря чему пользователь имеет доступ к приводу снаружи корпуса. Язычок размещен в непосредственной близости к ручке отклонения, благодаря чему пользователь может легко управлять обоими элементами даже одной рукой.
В другом варианте осуществления рукоятка управления в дополнение к узлу отклонения имеет приводной рычаг, где приводной рычаг и роликовый рычаг имеют отдельные оси вращения. Приводной рычаг управляет дополнительной проволокой натяжения, управляющей другим элементом катетера. В более подробном варианте осуществления приводной рычаг размещен дистально относительно роликового рычага и его ось вращения ориентирована по существу перпендикулярно к оси вращения роликового рычага. Корпус рукоятки управления имеет отверстие, через которое выступает язычок приводного рычага, благодаря чему пользователь имеет доступ к рычагу снаружи корпуса.
В еще одном варианте осуществления рукоятка управления в дополнение к узлу отклонения имеет приводное кольцо. Кольцо установлено снаружи рукоятки управления и выполнено с возможностью вращения относительно рукоятки управления, приводя в действие другую проволоку натяжения для управления другим элементом катетера.
Конструкция каждого из элементов - приводной диск, приводной рычаг и приводное кольцо - позволяет быстро модифицировать существующие рукоятки управления и катетеры так, чтобы встроить эти приводы. Приводной диск может быть установлен на существующие роликовые рычаги, что предполагает незначительные модификации существующих рукояток управления. Приводной рычаг и приводное кольцо могут быть установлены на существующие рукоятки управления, что предполагает незначительные модификации.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие особенности и преимущества настоящего изобретения станут понятнее на примере следующего подробного описания в сочетании с сопроводительными фигурами. Необходимо понимать, что выбранные конструкции и элементы не показаны на некоторых фигурах для лучшего обзора остальных конструкций и элементов.
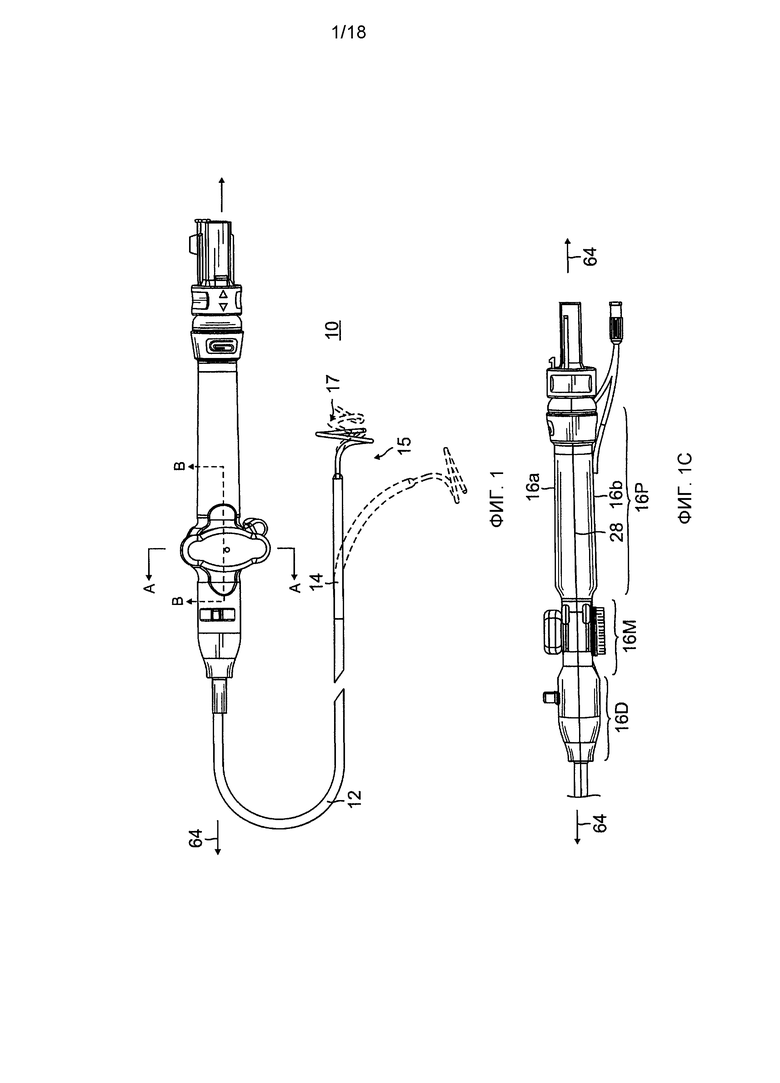
На ФИГ. 1 представлен вид сбоку в вертикальной проекции одного варианта осуществления катетера, составляющего предмет настоящего изобретения.
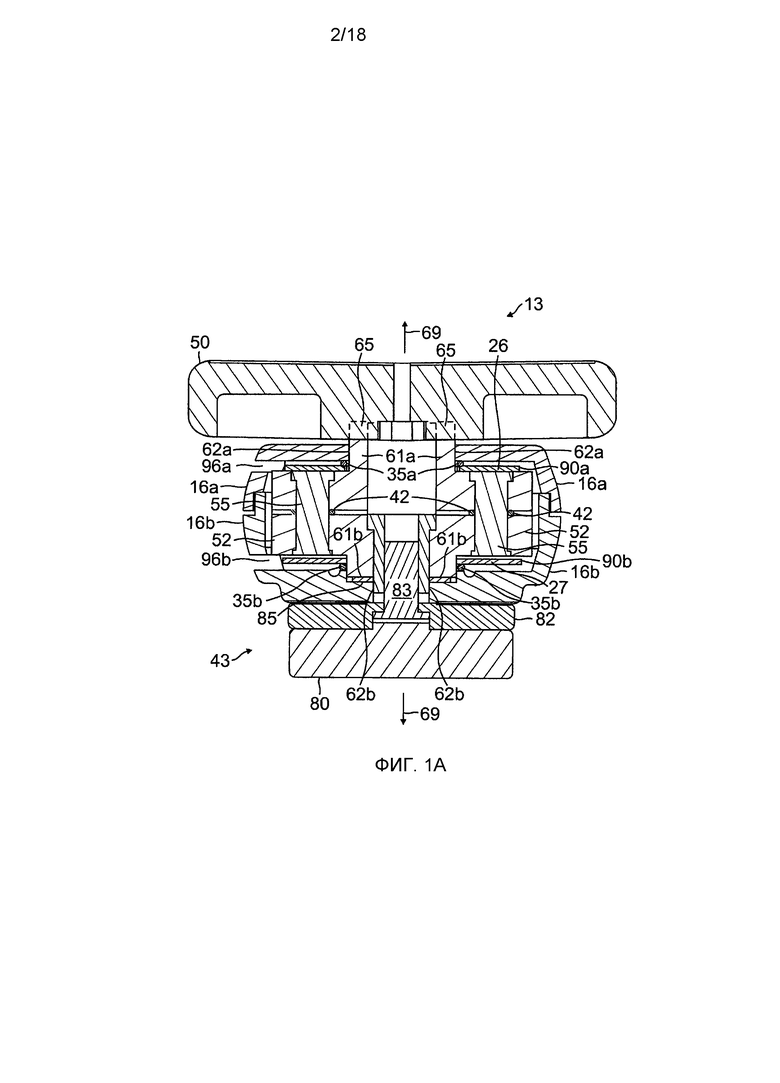
На ФИГ. 1A представлен вид сзади рукоятки управления, изображенной на ФИГ. 1, в сечении вдоль линии А-A.
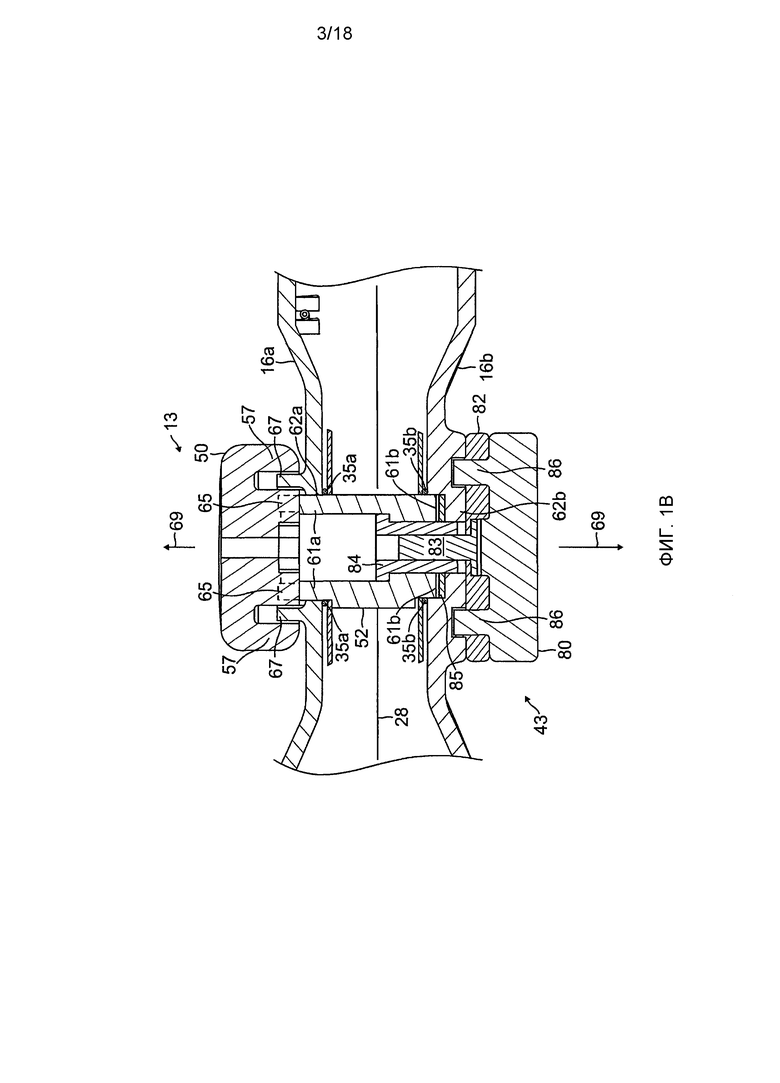
На ФИГ. 1B представлен вид сбоку рукоятки управления, изображенной на ФИГ. 1, в сечении по линии B-B.
На ФИГ. 1С представлен вид сверху катетера, изображенного на ФИГ. 1.
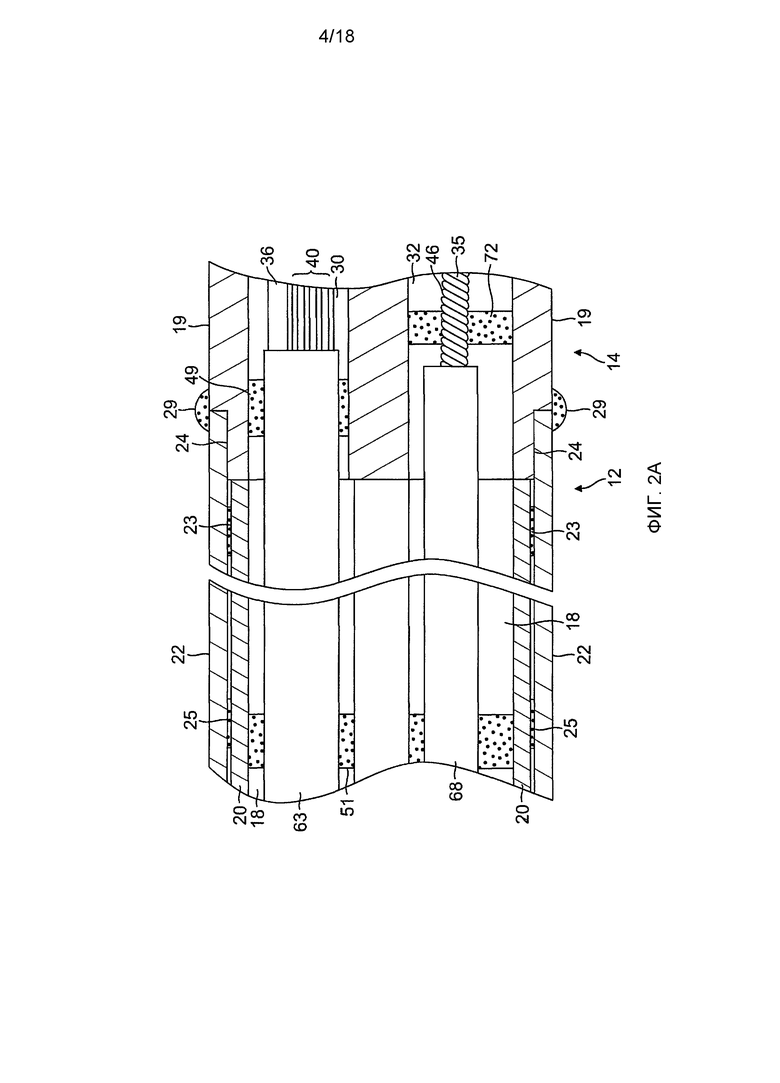
На ФИГ. 2A представлен вид сбоку варианта осуществления соединения между корпусом катетера и промежуточной секцией в сечении вдоль первого диаметра.
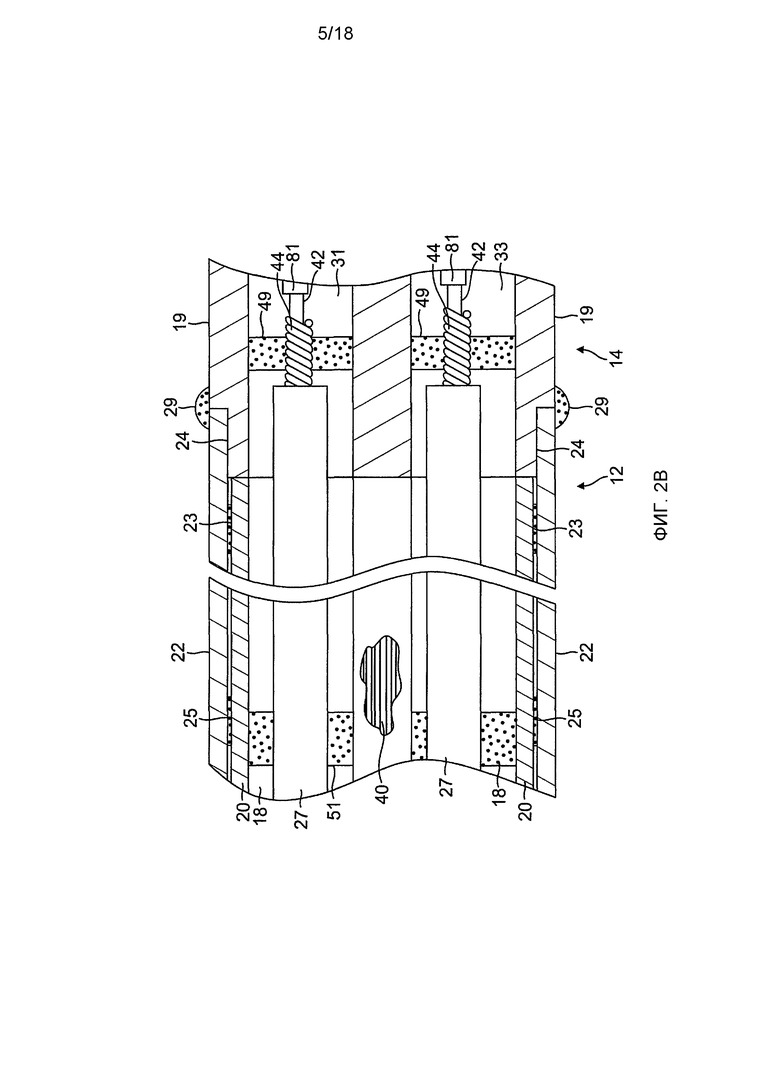
На ФИГ. 2B представлен вид сбоку варианта осуществления соединения, показанного на ФИГ. 2А, в сечении вдоль второго диаметра, по существу перпендикулярного первому диаметру.
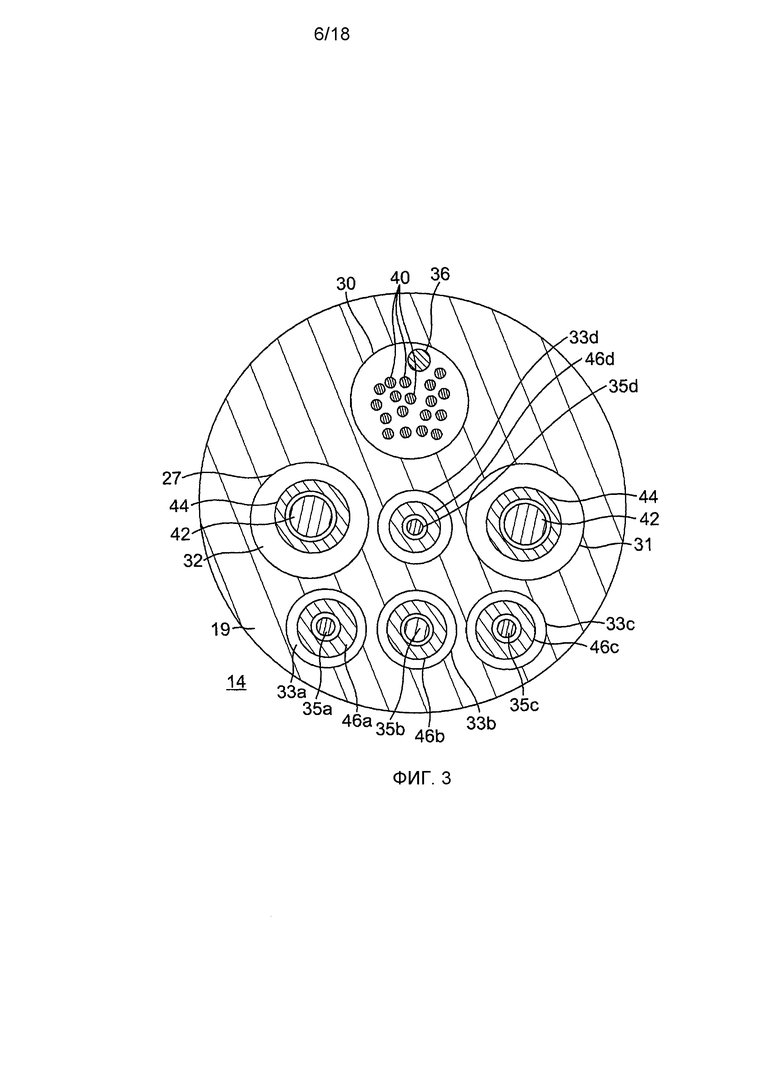
На ФИГ. 3 представлен вид сзади в сечении промежуточной секции, изображенной на ФИГ. 2A и 2B.
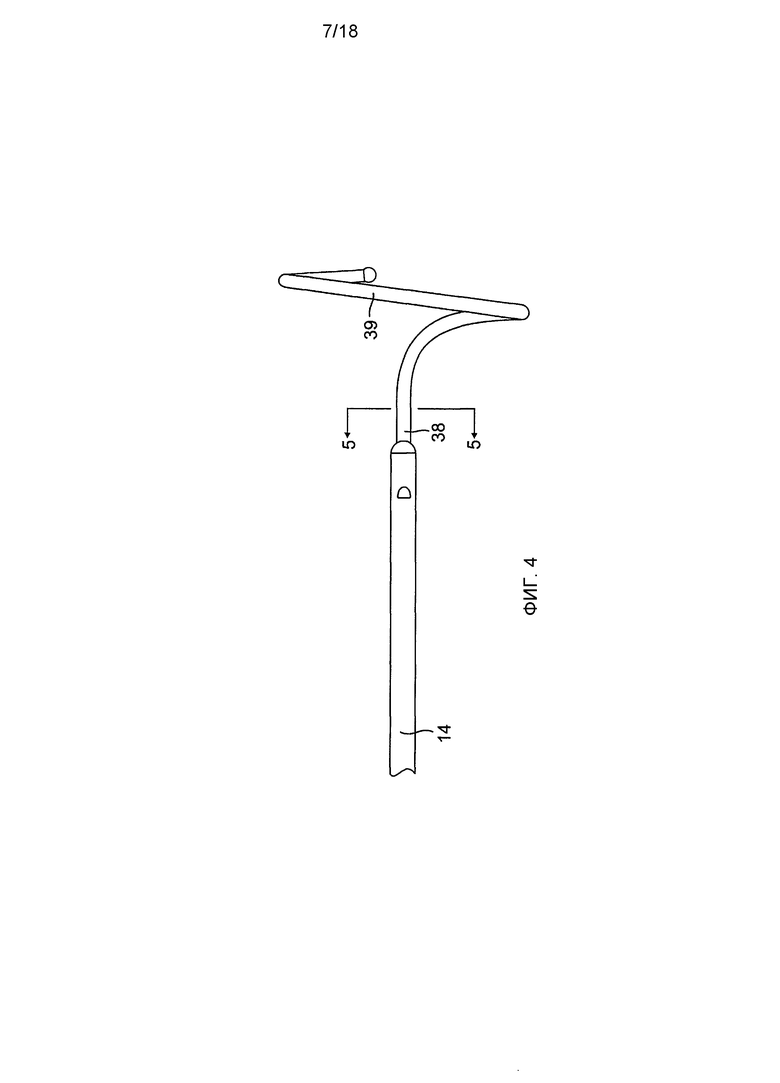
На ФИГ. 4 представлен вид сбоку в вертикальной проекции варианта осуществления дистального узла.
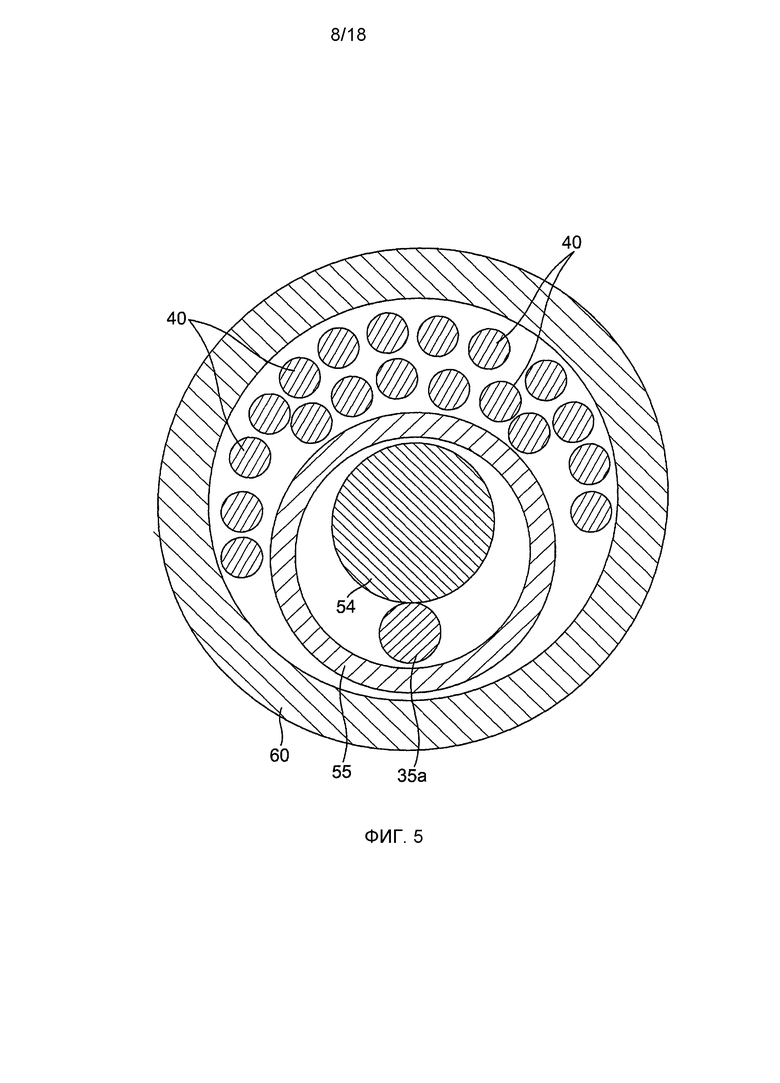
На ФИГ. 5 представлен вид сзади в сечении по существу прямой проксимальной части дистального узла, изображенного на ФИГ. 4, по линии 5-5.
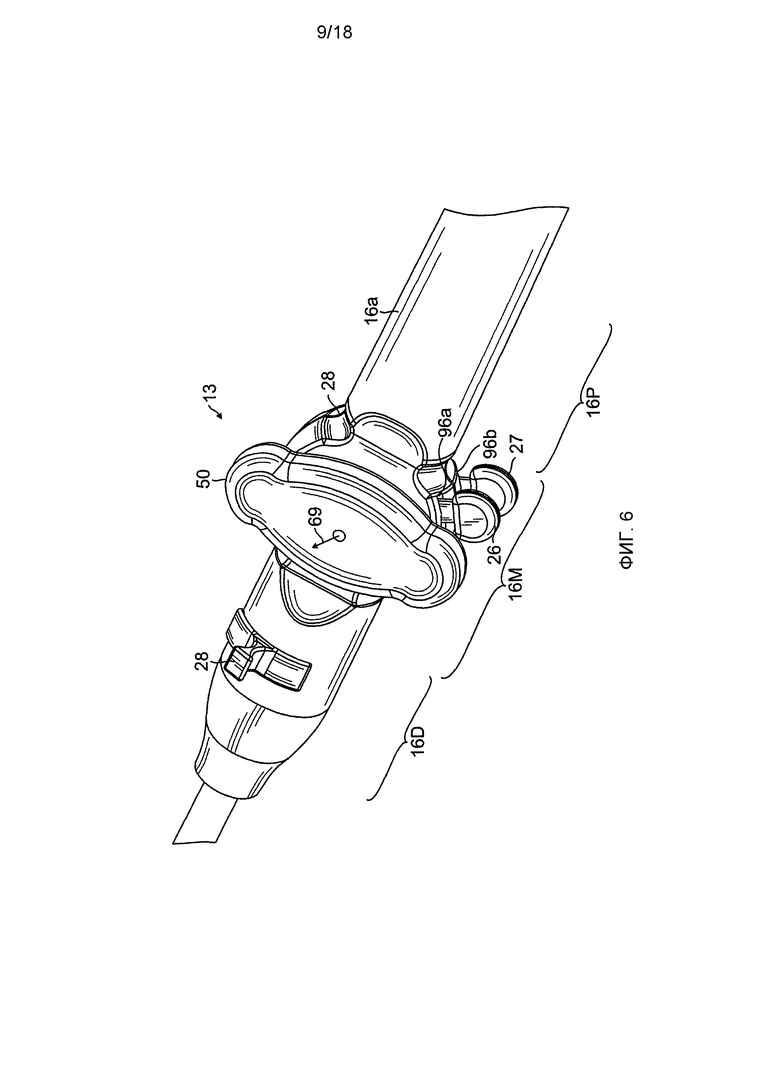
На ФИГ. 6 представлен вид в перспективе ручки отклонения, первого приводного диска, второго приводного диска и приводного рычага рукоятки управления, изображенной на ФИГ. 1.
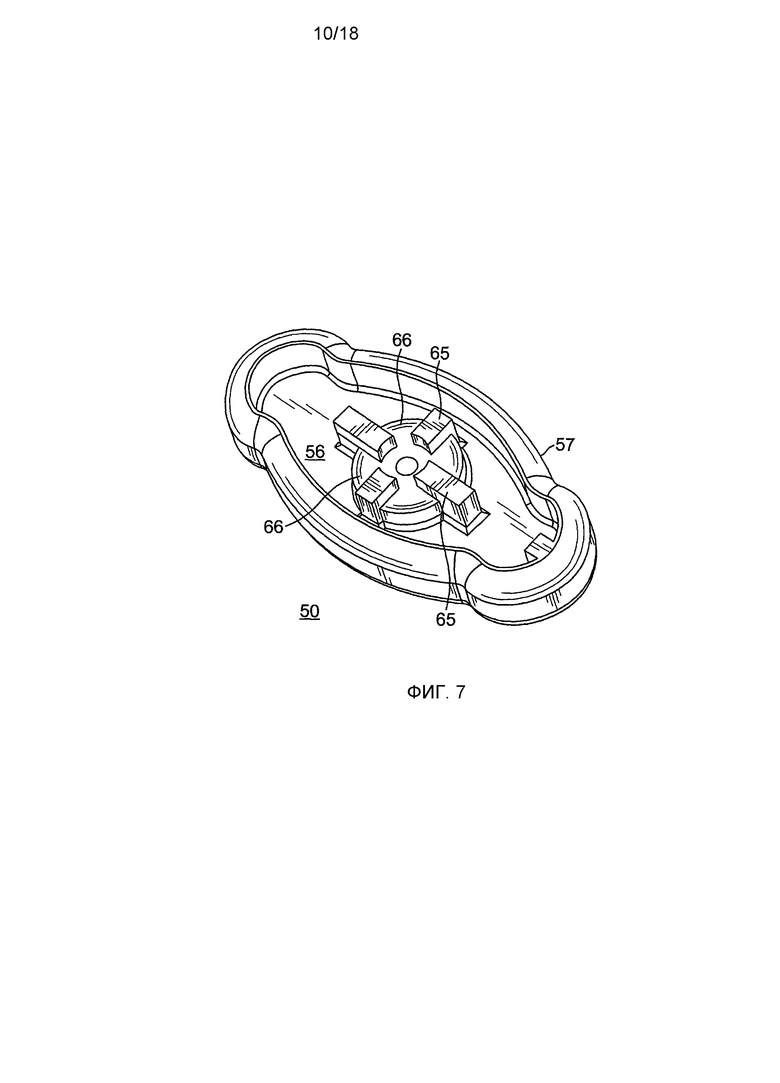
На ФИГ. 7 представлен вид в перспективе варианта осуществления ручки отклонения, показанной на ФИГ. 6.
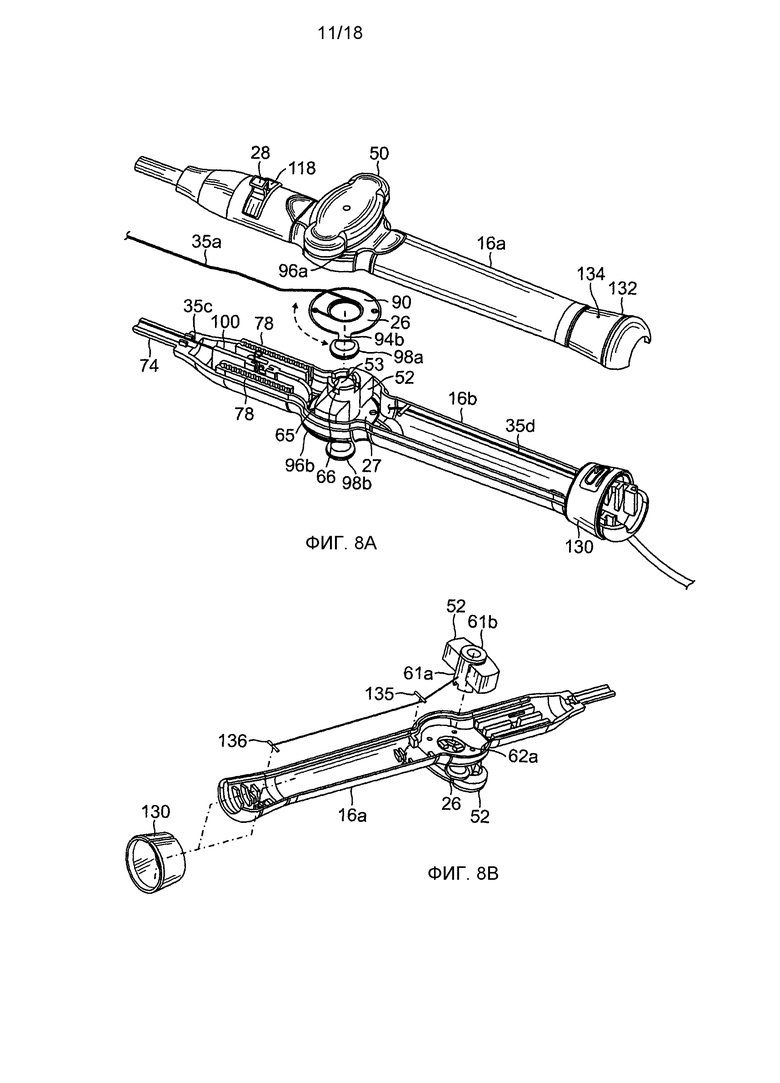
На ФИГ. 8A представлен вид в перспективе с пространственным разделением компонентов варианта осуществления рукоятки управления, показанной на ФИГ. 1.
На ФИГ. 8B представлен вид в перспективе с пространственным разделением выбранных компонентов рукоятки управления, показанной на ФИГ. 8А, включая половину корпуса, роликовый рычаг и ручку отклонения.
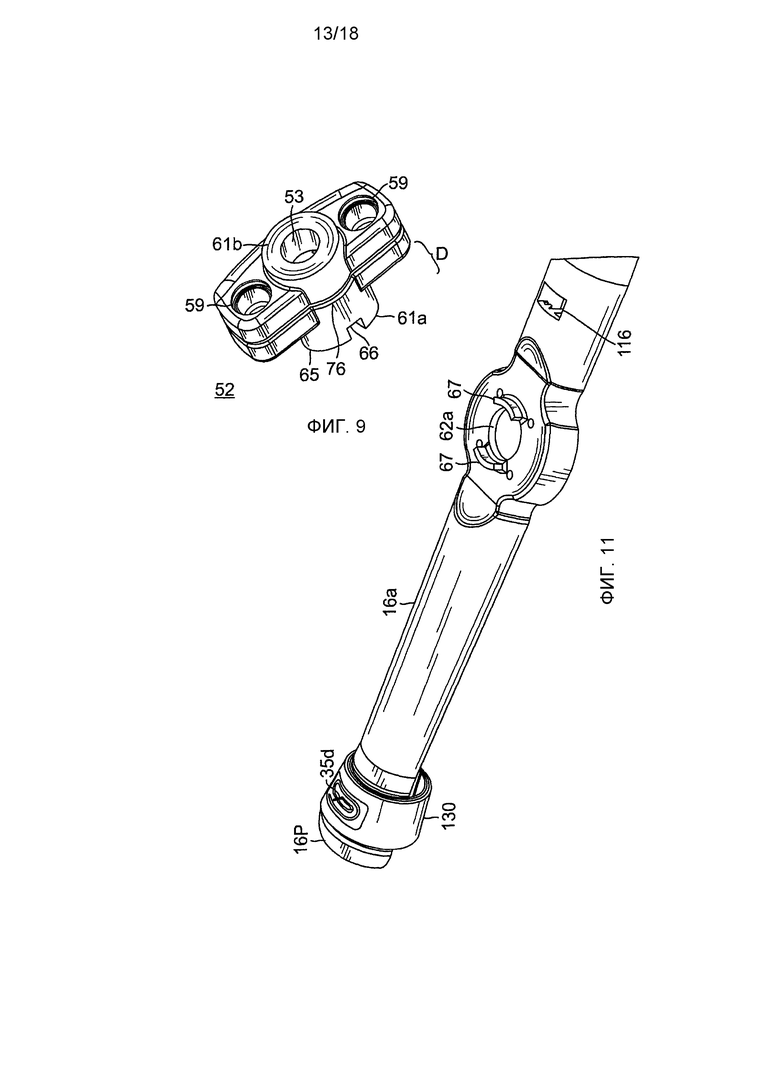
На ФИГ. 9 представлен вид в перспективе роликового рычага, изображенного на ФИГ. 8B.
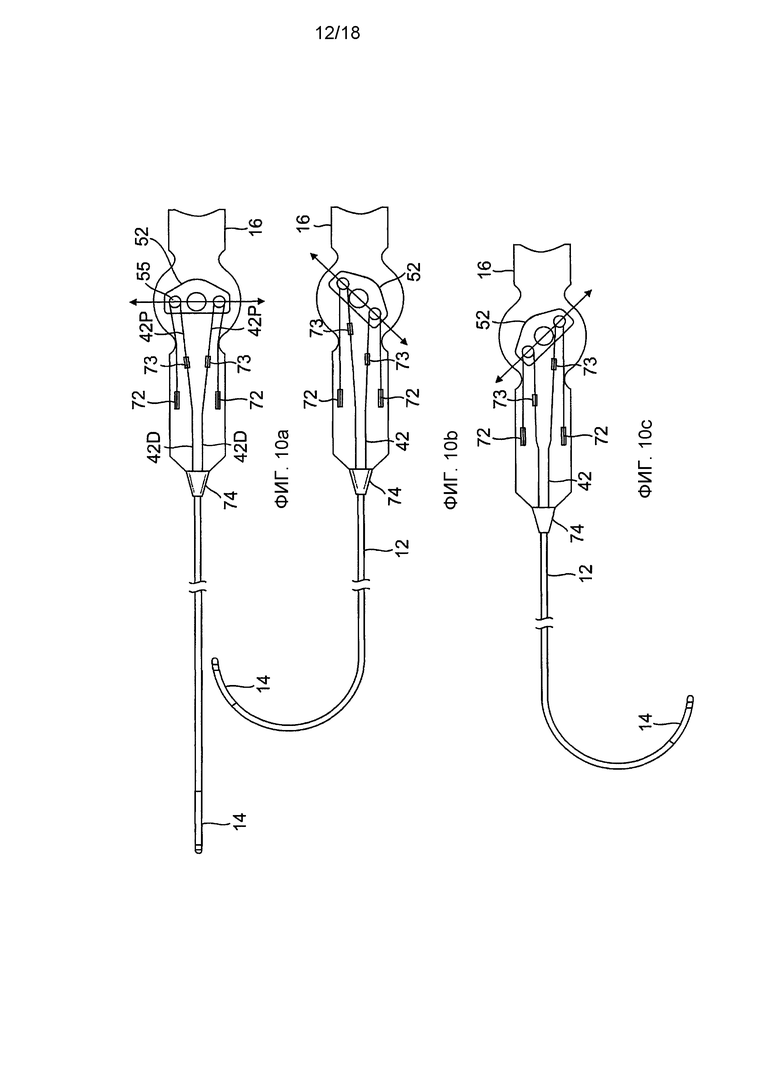
На ФИГ. 10A-10C схематично представлен вариант осуществления рукоятки управления в нейтральном положении, в положении с отклонением вправо и в положении с отклонением влево.
На ФИГ. 11 представлен вид в перспективе внешней поверхности варианта осуществления первой половины корпуса рукоятки управления.
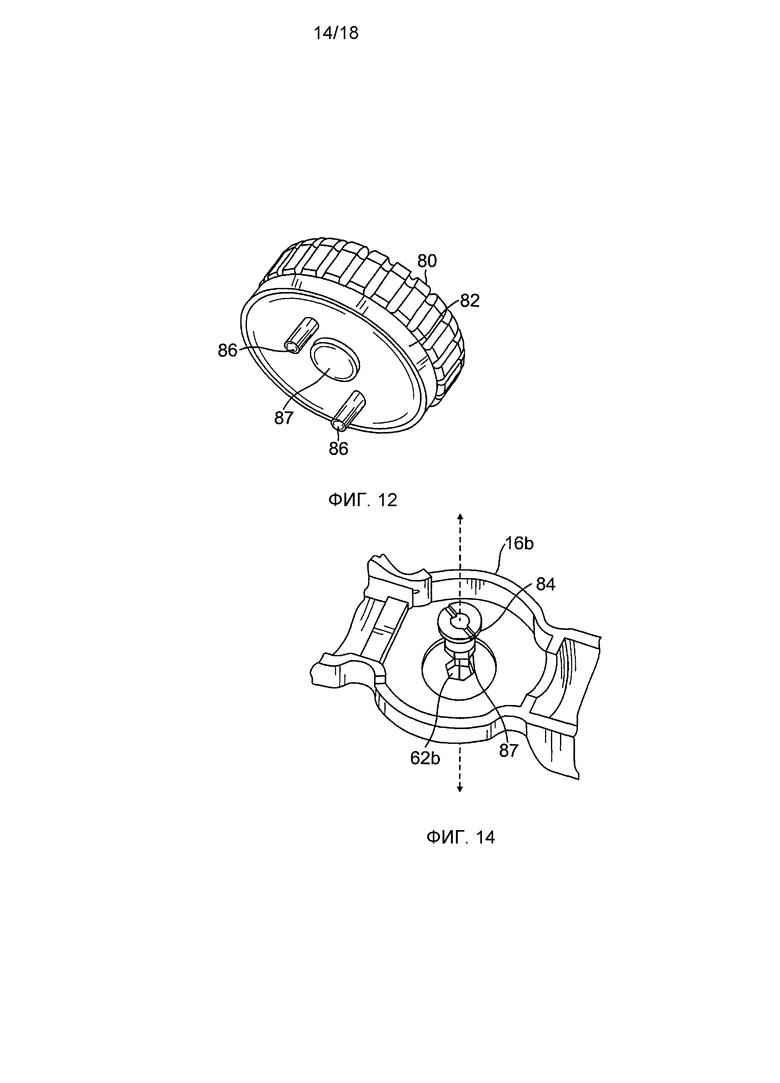
На ФИГ. 12 представлен вид в перспективе варианта осуществления диска регулирования натяжения и стопорной планки.
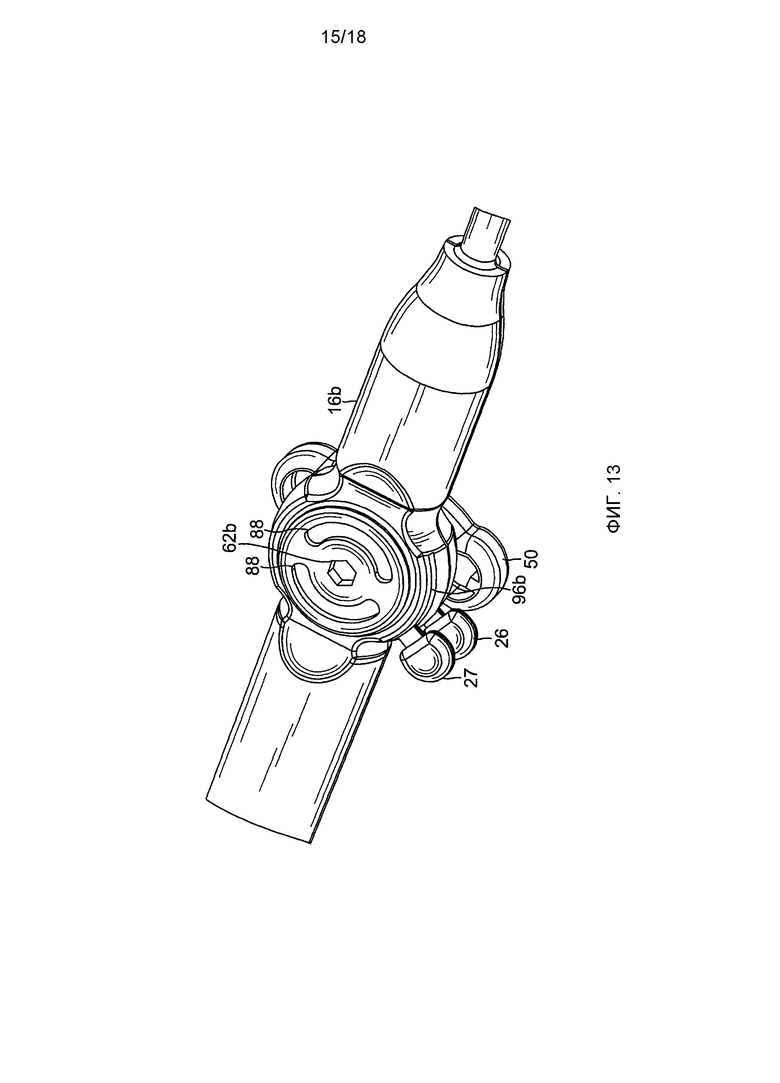
На ФИГ. 13 представлен вид в перспективе внешней поверхности варианта осуществления второй половины корпуса рукоятки управления.
На ФИГ. 14 представлен вид в перспективе внутренней поверхности варианта осуществления второй половины корпуса рукоятки управления.
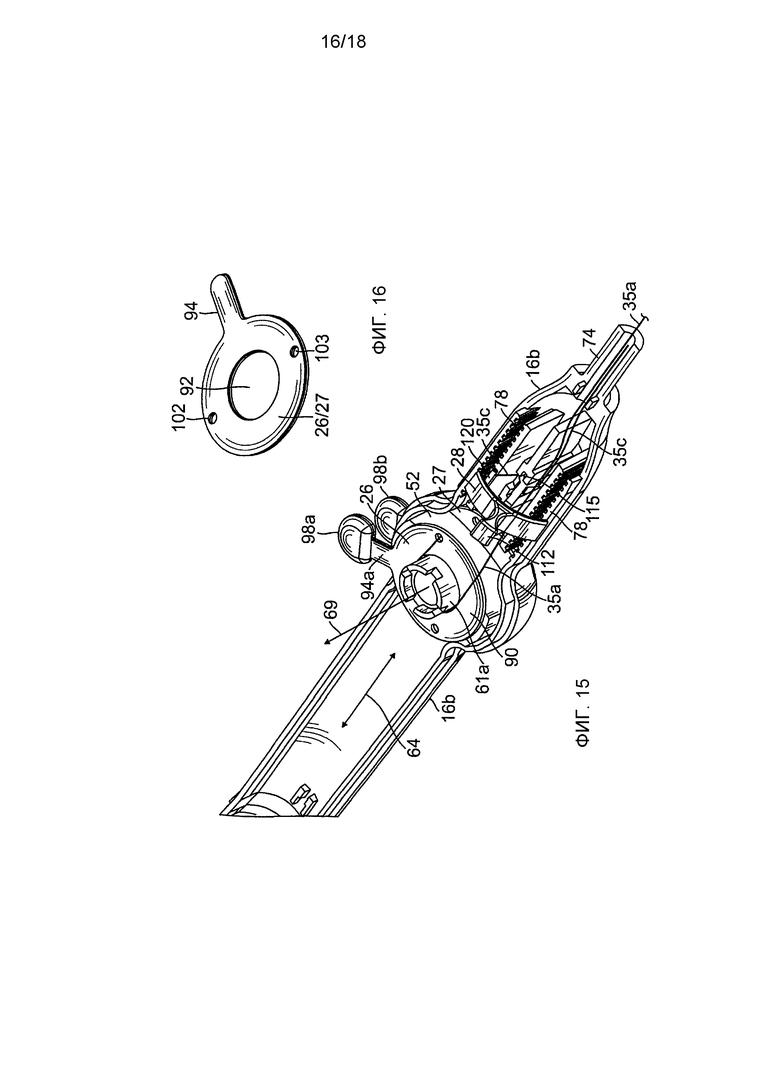
На ФИГ. 15 представлен вид в перспективе внутренней поверхности варианта осуществления второй половины корпуса рукоятки управления с первым и вторым приводными дисками и приводным рычагом.
На ФИГ. 16 представлен вид в перспективе приводного диска, изображенного на ФИГ. 15.
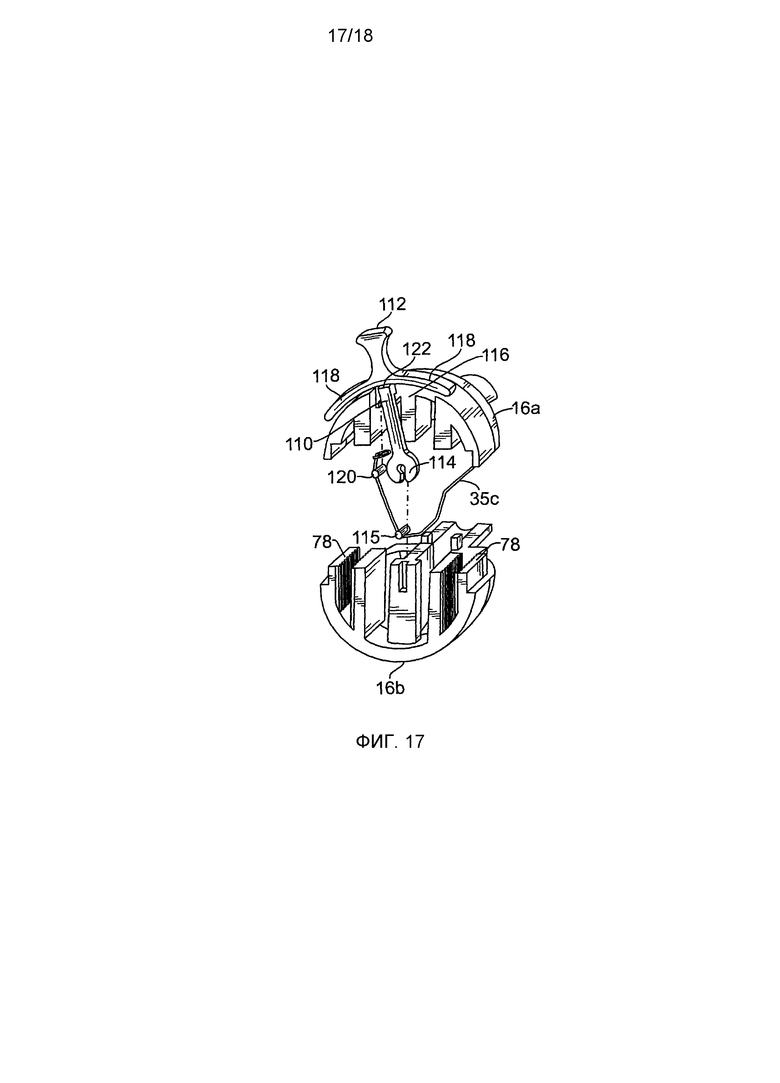
На ФИГ. 17 представлен вид в перспективе с пространственным разделением компонентов приводного рычага, изображенного на ФИГ. 15.
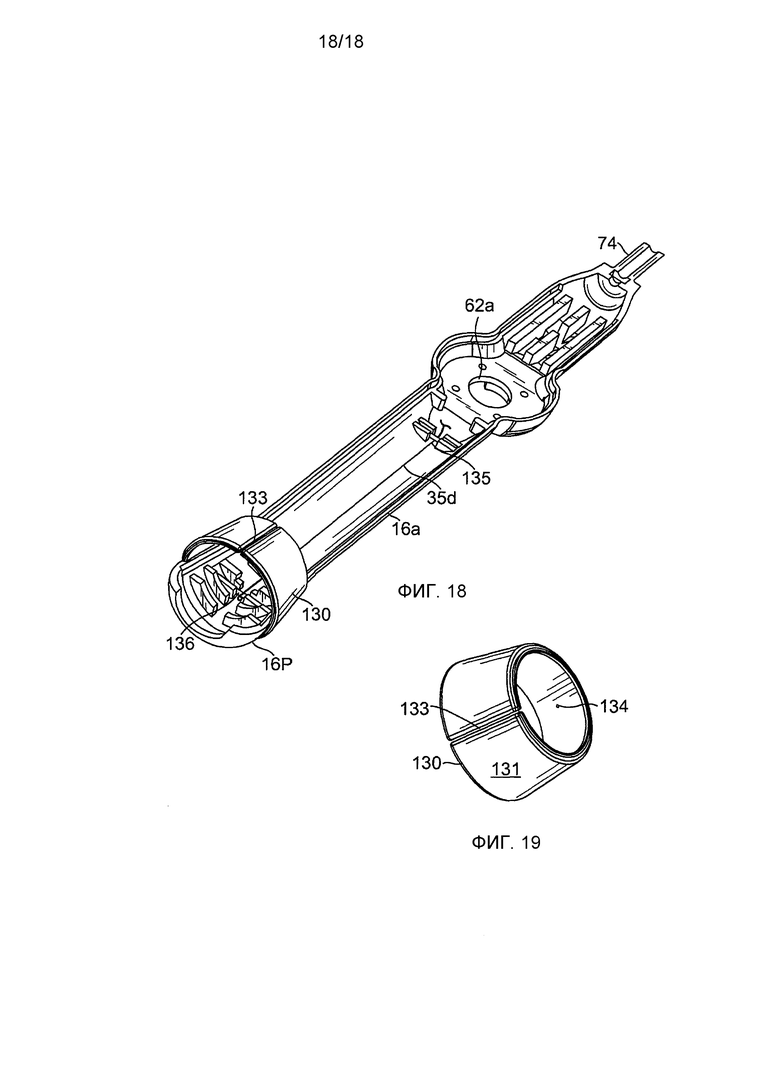
На ФИГ. 18 представлен вид в перспективе внутренней поверхности варианта осуществления первой половины корпуса рукоятки управления с вариантом осуществления приводного кольца.
На ФИГ. 19 представлен вид в перспективе приводного кольца, изображенного на ФИГ. 18.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к рукоятке управления 16 для использования с медицинским устройством, имеющим по меньшей мере два прочных вытягивающих элемента, например, две проволоки натяжения и т.п., для выполнения по меньшей мере двух независимых перемещений или управления компонентами медицинского устройства. Рукоятку управления можно использовать с широким спектром медицинских устройств, например, с электрофизиологическим (ЭФ) катетером 10, выполненным с возможностью картирования и/или абляции ткани, включая ткани сердца, вариант осуществления которого изображен на ФИГ. 1.
Представленный на ФИГ. 1 катетер 10 содержит удлиненный корпус катетера 12, изгибаемую промежуточную секцию 14 на дистальном конце корпуса катетера 12 и секцию наконечника 15, включая дистальный узел 17, имеющий, например, спиралевидную форму, на дистальном конце промежуточной секции 14. Катетер содержит рукоятку управления 16 с несколькими приводами проволок натяжения, включая приводы для одно- и двунаправленного отклонения промежуточной секции и управления дистальным узлом, например, для сжатия дистального узла спиралевидной формы. Каждый привод может работать отдельно и независимо без воздействия на другой привод или его проволоку (проволоки) натяжения.
Как показано на ФИГ. 2A и 2B, корпус катетера 12 имеет один центральный или продольный просвет 18. Корпус катетера 12 является гибким, а именно поддающимся изгибу, но по существу несжимаемым по всей длине. Корпус катетера 12 может иметь любую допустимую конструкцию и может быть изготовлен из любого соответствующего материала. В одном варианте осуществления корпус катетера 12 содержит наружную стенку 22, выполненную из полиуретана или пебакса. Наружная стенка 22 включает встроенную плетеную сетку из нержавеющей стали и т.п. для повышения жесткости на скручивание корпуса катетера 12, так чтобы при вращении рукоятки управления 16 наконечник катетера 10 поворачивался соответствующим образом.
Внешний диаметр корпуса катетера 12 не имеет значения, но предпочтительно не должен превышать приблизительно 2,7 мм (8 французских пунктов). Аналогичным образом, толщина наружной стенки 22 не имеет решающего значения. Внутренняя поверхность наружной стенки 22 может быть укреплена упрочняющей трубкой 20, которая может быть изготовлена из любого соответствующего материала, предпочтительно полиимида. Трубка 20, придающая дополнительную жесткость, фиксируется относительно наружной стенки 22 на проксимальном конце корпуса катетера 12. Между дистальными концами упрочняющей трубки 20 и наружной стенки 22 выполнено первое клеевое соединение 23 при помощи быстросохнущего клея, например, Super Glue.RTM. После этого выполняют второе клеевое соединение 25 между проксимальными концами упрочняющей трубки 20 и наружной стенки 22 с использованием долгосохнущего, но более прочного клея, например, полиуретанового клея.
Упрочняющая трубка 20 и оплетенная наружная стенка 22 обеспечивают повышенную жесткость на скручивание, значительно сокращая толщину стенки катетера, что позволяет максимально увеличить диаметр одного просвета. Внешний диаметр упрочняющей трубки 20 приблизительно равен внутреннему диаметру наружной стенки 22 или немногим меньше его. Предпочтительно использование полиимидной трубки, так как она имеет очень тонкую стенку и в то же время обладает хорошей жесткостью. Это позволяет максимально увеличить диаметр центрального просвета 18 без ущерба для прочности и жесткости. Как правило, полиимидный материал не используется для изготовления упрочняющих трубок из-за склонности к перекручиванию во время изгиба. Однако было установлено, что в комбинации с наружной стенкой 22 из полиуретана, пебакса или подобного материала, в особенности оснащенного оплеткой из нержавеющей стали, подверженность полиимидной упрочняющей трубки 20 к перекручиванию при изгибе практически исключается при условии использования катетера по назначению. В одном варианте осуществления наружная стенка 22 имеет внешний диаметр приблизительно 2,34 мм (0,092 дюйма) и внутренний диаметр приблизительно 1,60 мм (0,063 дюйма), а полиимидная упрочняющая трубка 20 имеет внешний диаметр приблизительно 1,56 мм (0,0615 дюйма) и внутренний диаметр приблизительно 1,62 мм (0,052 дюйма).
Как показано на ФИГ. 2A, 2B и 3, промежуточная секция 14 содержит более короткий отрезок трубки 19 с множеством просветов, например, первым, вторым и третьим просветами 30, 31 и 32. В описываемом варианте осуществления трубка 19 также включает в себя четвертый, пятый, шестой и седьмой просветы 33a, 33b, 33c и 33d. Трубка 19 изготовлена из допустимого нетоксичного материала, предпочтительно более гибкого, чем материал корпуса катетера 12. Соответствующим материалом для трубки 19 является оплетенный полиуретан, то есть полиуретан с включенной сеткой из нержавеющей стали и т.п. Внешний диаметр промежуточной секции 14, как и внешний диаметр корпуса катетера 12, предпочтительно не превышает приблизительно 2,7 мм (8 французских пунктов). Размер просветов не имеет решающего значения. В одном варианте осуществления промежуточная секция имеет внешний диаметр приблизительно 2,3 мм (7 французских пунктов, 0,092 дюйма), просветы по существу имеют приблизительно такой же размер, и их диаметр составляет приблизительно 0,559 мм (0,022 дюйма), или выбранные просветы могут иметь несколько больший диаметр - приблизительно 0,914 мм (0,036 дюйма).
Средство для прикрепления корпуса катетера 12 к промежуточной секции 14 изображено на ФИГ. 2A и 2B. Проксимальный конец промежуточной секции 14 имеет внутреннее глухое отверстие 24, принимающее внешнюю поверхность полиимидной упрочняющей трубки 20. Промежуточная секция 14 и корпус катетера 12 скреплены клеем 29 и т.п.
Как показано на ФИГ. 2A и 2B, через одиночный просвет 18 корпуса катетера 12 проходят различные компоненты, например, токопроводящие проводники и множество проволок натяжения, а также любые иные провода или кабели. Продольное перемещение проволок натяжения относительно корпуса катетера 12 позволяет пользователю контролировать различные части катетера, используя рукоятку управления. Как указано выше, в одном варианте осуществления в конструкции есть по меньшей мере первая и вторая отклоняющие проволоки натяжения 42 для отклонения промежуточной секции 14 и третья проволока натяжения 35a для управления дистальным узлом 17 секции наконечника 15 и регулирования его положения. Катетер может включать в себя дополнительные проволоки натяжения, например, четвертую, пятую и шестую проволоки натяжения 35b, 35c и 35d для управления и регулирования положения дополнительных элементов дистального узла. Каждая проволока натяжения 42 изготовлена из соответствующего металла, такого как нержавеющая сталь или нитинол. В предпочтительном варианте осуществления каждая проволока натяжения имеет покрытие с низким коэффициентом трения, например, тефлоновое покрытие (Teflon.RTM.) и т.п. Диаметр каждой проволоки натяжения предпочтительно находится в диапазоне от приблизительно 0,152 мм (0,006 дюйма) до приблизительно 0,305 мм (0,012 дюйма). Обе проволоки натяжения предпочтительно должны иметь одинаковый диаметр. Вместо круглой проволоки натяжения допускается использование плоской проволоки. При этом размер поперечного сечения плоской проволоки должен быть таким, чтобы обеспечить прочность на разрыв, сопоставимую с прочностью круглой проволоки натяжения.
В альтернативном варианте осуществления проволоки натяжения могут быть частично или полностью заменены прочными на растяжение волокнами. Волокна могут быть изготовлены из высокомодульного материала, предпочтительно с предельной прочностью на разрыв, по существу в диапазоне 2 480-3 200 МПа (412-463 тыс. фунтов на кв. дюйм), например, из полиэтилена высокой плотности (например, Spectra™ или Dyneema™), пряденого параарамидного волокна (например, Kevlar™), пряденого жгута из расплавленных жидкокристаллических полимерных волокон (например, Vectran™) или высокопрочного керамического волокна (например, Nextel™). В настоящем документе термины «волокно» и «волокна» являются взаимозаменяемыми в том смысле, что прочное на растяжение волокно может иметь витую или плетеную структуру. В любом случае эти материалы обладают гибкостью, обеспечивая соответствующую долговечность при использовании в намотке на ролики и т.п. и лучшую управляемость при отклонении кончика катетера. Кроме того, такие материалы, по существу, не растягиваются, что улучшает ответную реакцию на управление рукояткой управления, и являются немагнитными, благодаря чему они по существу прозрачны при МРТ. Низкая плотность материала позволяет ему оставаться по существу прозрачным для рентгеновского аппарата. Материалы также могут быть непроводящими во избежание короткого замыкания. Например, материал Vectran™ обладает высокой прочностью и износоустойчивостью, является диэлектриком, не намагничивается; это полимерный материал с низкой деформацией растяжения в условиях длительного нагружения. Поэтому следует понимать, что используемый в настоящем документе термин «проволока» может представлять собой проволоку, прочное на растяжение волокно или прочный на растяжение элемент, содержащий сегмент (сегменты) из проволоки и сегмент (сегменты) из прочного на растяжение волокна.
Однопросветный корпус катетера 12 может быть предпочтительнее корпуса с множеством просветов, так как один просвет 18 корпуса позволяет лучше контролировать положение наконечника при вращении катетера 10. Один просвет 18 позволяет свободно разместить все проходящие по нему элементы внутри корпуса катетера. Если эти элементы заключены в нескольких просветах, то в процессе вращения рукоятки 16 они могут аккумулировать энергию, что может вызвать обратное вращение корпуса катетера 12, например, при отпускании рукоятки или при изгибе по кривой, либо поворот на 180 градусов; при этом оба явления являются нежелательными.
Как показано на ФИГ. 3, одна отклоняющая проволока натяжения 42 проходит через центральный просвет 18 корпуса катетера 12 во второй просвет 31 промежуточной секции 14. Другая отклоняющая проволока натяжения 42 проходит через центральный просвет 18 в третий просвет 32 промежуточной секции 14. В этой связи просветы 31 и 32 должны быть смещены от оси и должны быть диаметрально противоположными друг другу для двунаправленного отклонения в плоскости. Дистальные концы отклоняющих проволок натяжения 42 закреплены на стенке трубки 19 у дистального конца промежуточной секции 14 с помощью Т-образных фиксаторов (на фигуре не показаны), как будет понятно специалистам в данной области. В промежуточной секции 14 каждая отклоняющая проволока натяжения 42 имеет пластмассовую, например, тефлоновую (Teflon.RTM.), оболочку 81, которая предотвращает врезание отклоняющих проволок натяжения 42 в стенку трубки 19 промежуточной секции 14 при отклонении промежуточной секции 14.
Как показано на ФИГ. 2B, от проксимального конца корпуса катетера 12 к проксимальному концу промежуточной секции 14 отходят компрессионные обмотки 44, окружающие отклоняющие проволоки натяжения 42. Компрессионные обмотки 44 изготовлены из любого соответствующего металла, например, из нержавеющей стали. Компрессионные обмотки 44 имеют плотную намотку, что обеспечивает гибкость, то есть способность к изгибу, но при этом хорошую сопротивляемость сжатию. Внутренний диаметр компрессионных обмоток 44 предпочтительно незначительно превышает диаметр проволок натяжения 42. Например, если диаметр проволоки натяжения 42 равен приблизительно 0,178 мм (0,007 дюйма), то внутренний диаметр компрессионной обмотки 44 предпочтительно составляет приблизительно 0,203 мм (0,008 дюйма). Тефлоновое (Teflon.RTM.) покрытие проволок натяжения 42 позволяет им свободно скользить внутри компрессионных обмоток 44. Наружная поверхность компрессионных обмоток 44 покрыта гибкой непроводящей оболочкой 27, препятствующей контакту компрессионных обмоток 44 с другими элементами, такими как токопроводящие проводники и кабели и т.д. В одном варианте осуществления непроводящая оболочка выполнена из полиимидной трубки.
Проксимальные концы компрессионных обмоток 44 зафиксированы на проксимальном конце упрочняющей трубки 20 в корпусе катетера 12 с помощью клеевого соединения 51 (ФИГ. 2B), а дистальные концы зафиксированы рядом с проксимальным концом промежуточной секции 14 во втором просвете 31 и в третьем просвете 32 с помощью клеевых соединений 49 (ФИГ. 2B).
Как показано на ФИГ. 4, на дистальном конце промежуточной секции 14 находится дистальный узел 17. Дистальный узел 17 содержит по существу прямую проксимальную область 38 и по существу кольцевую основную область 39. Проксимальная область 38 установлена на промежуточной секции 14, а в основной области 39 находится множество электродов для картирования и/или абляции. В представленном на ФИГ. 5 варианте осуществления дистальный узел 17 включает в себя трубку 61. Элемент с эффектом запоминания формы 54 и токопроводящие проводники 40 для расположенных на дистальном узле электродов проходят через просвет в трубке 61 в промежуточную секцию 14 и в корпус катетера 12.
В описанном варианте осуществления третья или сжимающая проволока натяжения 35a предназначена для сжатия по существу кольцевой основной области 39, что позволяет изменять или уменьшать ее диаметр, например, во время картирования или абляции кольцевых или трубчатых структур сердца. Проксимальный конец сжимающей проволоки 35a зафиксирован в рукоятке управления 16, как дополнительно описано ниже. Сжимающая проволока 35a проходит через центральный просвет 18 корпуса катетера 12 и через четвертый просвет 33a промежуточной секции 14 (ФИГ. 3) и поступает в дистальный узел 17 (ФИГ. 5).
Третья компрессионная обмотка 46a расположена в корпусе катетера 12 и стволе промежуточной секции 14 и охватывает сжимающую проволоку 35a (ФИГ. 2A). Третья компрессионная обмотка 46a проходит от проксимального конца корпуса катетера 12 до участка рядом с дистальным концом четвертого просвета 33a промежуточной секции 14. Третья компрессионная обмотка 46a изготовлена из любого соответствующего металла, такого как нержавеющая сталь, и плотно намотана для обеспечения гибкости, то есть способности к изгибу, но при этом обладает прочностью на сжатие. Внутренний диаметр третьей компрессионной обмотки 46a предпочтительно незначительно превышает диаметр сжимающей проволоки 35a. Наружная поверхность компрессионной обмотки 46a покрыта гибкой изолирующей оболочкой 68a, например, изготовленной из полиимидной трубки. Третья компрессионная обмотка 46a предпочтительно сформирована из проволоки с квадратным или прямоугольным сечением, что делает ее менее сжимаемой в сравнении с компрессионной обмоткой, сформированной из проволоки с круглым сечением. В результате третья компрессионная обмотка 46a предохраняет корпус катетера 12 и, в частности, промежуточную секцию 14 от отклонения при сжатии дистального узла 17 с помощью сжимающей проволоки 35a, так как она поглощает большую часть сжатия. Проксимальный конец компрессионной обмотки 46a зафиксирован на упрочняющей трубке 20 корпуса катетера 12 с помощью проксимального клеевого соединения 51 и на промежуточной секции 14 с помощью дистального клеевого соединения 49. С учетом изложенного выше, следует понимать, что четвертая, пятая и шестая проволоки натяжения 35b, 35c и 35d и соответствующие компрессионные обмотки 46b, 46c и 46d имеют аналогичную конструкцию и размещаются в катетере.
Клеевые соединения на катетере 10 могут содержать полиуретановый клей и т.п. Для нанесения клея используют шприц и т.п. Клей наносят через отверстие, предусмотренное в стенке трубки. Такое отверстие может быть сформировано, например, при помощи иглы и т.п., используемой для прокола стенки трубки, при этом игла предварительно нагревается до степени, достаточной, чтобы сформировать постоянное отверстие. После этого через отверстие вводится клей, заполняя пространство вокруг элемента (элементов) внутри трубки и образуя клеевое соединение по всему контуру элемента (элементов).
Токопроводящие проводники 40, прикрепленные к кольцевым электродам на дистальном узле 17, проходят через первый просвет 30 промежуточной секции 14 (ФИГ. 2A), через центральный просвет 18 корпуса катетера 12 и через рукоятку управления 16, а их проксимальные концы закреплены в разъеме (на фигуре не показан), подключенном к соответствующему монитору или другому устройству для регистрации и отображения данных, полученных от кольцевых электродов. Часть токопроводящих проводников 40, проходящих через центральный просвет 18 корпуса катетера 12, рукоятку управления 16 и проксимальный конец промежуточной секции 14, заключена в защитную оболочку 63, которая может быть изготовлена из любого соответствующего материала, предпочтительно полиимида.
В дистальном узле 17 или рядом с ним, например, в дистальном конце промежуточной секции 14, установлен электромагнитный датчик положения (на фигуре не показан). Кабель датчика 36 проходит от датчика через просвет 30 (ФИГ. 2А) промежуточной секции (вместе с электродными токопроводящими проводниками 40) в центральный просвет 18 корпуса катетера 12 и рукоятку управления 16, где заканчивается на соответствующем разъеме (на фигуре не показан).
Как показано на ФИГ. 1, рукоятка управления 16 содержит по существу удлиненный корпус рукоятки, который может быть изготовлен из любого соответствующего жесткого материала. Удлиненный корпус определяет продольную ось 64 и может представлять собой цельную конструкцию или состоять из двух противоположных половин 16a, 16b, соединенных друг с другом вдоль шва 28 при помощи клея, ультразвуковой сварки или других подходящих средств. Корпус можно разделить на дистальную часть 16D, среднюю часть 16M и проксимальную часть 16P.
В соответствии с настоящим изобретением рукоятка управления 16 вмещает несколько приводов проволок натяжения. Как показано на ФИГ. 6, в средней части 16М рукоятки управления 16 имеется узел управления отклонением 13 для двунаправленного отклонения промежуточной секции 14 при помощи пары проволок натяжения 42. Средняя часть рукоятки управления также содержит третий привод проволоки натяжения 26 и четвертый привод проволоки натяжения 27.
Как показано на ФИГ. 1A и 1B, узел управления отклонением 13 включает ручку отклонения 50, выполненную с возможностью вращения и установленную снаружи корпуса рукоятки 16a, и роликовый рычаг 52, расположенный внутри рукоятки управления 16 в средней части рукоятки управления. Ручка 50 (ФИГ. 7) имеет по существу плоское тело с по существу овальной формой в сечении. Тело окружает периферийная кромка 57. Будучи установленным на рукоятке управления 16, тело ручки лежит в плоскости, по существу параллельной продольной оси 64 рукоятки управления, как хорошо видно на ФИГ. 1C. Во время вращения ручки ее тело остается в пределах плоскости.
Как показано на ФИГ. 1A и 9, основное тело роликового рычага 52 имеет по существу прямоугольное поперечное сечение и центральное отверстие 53, проходящее через тело и разделяющее тело на две половины. В каждой половине предусмотрено сквозное отверстие 59, занятое соответствующим роликом 55 (ФИГ. 1A), выполненным с возможностью вращения вокруг собственной оси. На каждом конце центрального отверстия 53 предусмотрен радиальный опорный элемент 61a и 61b с круглым поперечным сечением. Сквозные отверстия 62a и 62b, сформированные в соответствующих половинах корпуса рукоятки управления 16a и 16b, вмещают в себя соответствующие опорные элементы, удерживающие роликовый рычаг 52 в рукоятке управления. Радиальный опорный элемент 61a, размещенный рядом с ручкой, имеет больший осевой размер D (ФИГ. 9), чем противоположный радиальный элемент 61b, для прямого поворотного соединения с ручкой 50, таким образом, ручка 50 и роликовый рычаг 52 имеют общую ось вращения 69, по существу перпендикулярную продольной оси 64 рукоятки управления. В раскрытом варианте осуществления на контактирующих ответных поверхностях ручки 50 и радиального опорного элемента 61a предусмотрено блокирующее сопряжение перемежающихся гребней 65 и выемок 66. Более того, гребни 65 (ФИГ. 7) на внутренней ответной поверхности 68 ручки 50 имеют удлиненную форму, что препятствует смещению ручки 50 относительно радиального опорного элемента 61a во время вращения ручки пользователем. Кроме этого, на внешней поверхности корпуса рукоятки 16а предусмотрены выступающие направляющие 67 (ФИГ. 1B и 11) для блокировки удлиненных гребней 65 с целью ограничения диапазона вращения ручки 50 и предотвращения ее перекручивания и разрыва отклоняющих проволок натяжения 42. Ручка 50 и роликовый рычаг 52 могут быть соединены путем нанесения клея, например, эпоксидного, между их контактными поверхностями, или при помощи болтов и т.п. Таким образом, пользователь, вращая ручку 50, поворачивает роликовый рычаг и приводит в действие отклоняющие проволоки натяжения 42, как показано на ФИГ. 10A-10C. Пара двунаправленных отклоняющих проволок натяжения 42 входит в рукоятку управления 16 через порт 74 на дистальном конце рукоятки управления. Проволоки натяжения входят в роликовый рычаг 52 через паз 76 (ФИГ. 9), и каждая проволока оборачивается или обматывается вокруг соответствующего ролика 55 (ФИГ. 1А) приблизительно на 180 градусов перед выходом из роликового рычага через паз. Проксимальный конец каждого вытягивающего элемента 42 зафиксирован на стопорном элементе 72, который неподвижно, но при этом с возможностью регулировки фиксируется при помощи зазубренных пазов 78 (ФИГ. 8) в рукоятке управления 16. При повороте ручки 50 в одном направлении роликовый рычаг 52 поворачивается в этом направлении на проволоке натяжения 42 с этой стороны для отклонения промежуточной секции 14 в данном направлении. Аналогичный роликовый рычаг описан в патенте США № 7377906, текст которого полностью включен в настоящий документ путем ссылки.
Поскольку каждая отклоняющая проволока натяжения 42 может испытывать многократные изгибы вокруг ролика 55, расположенный в рукоятке управления сегмент каждой проволоки натяжения, и в особенности часть, огибающая ролики, может содержать сегмент из прочного на растяжение волокна, такого как описано выше, который лучше переносит указанные нагрузки. Для соединения проксимального конца каждого из первого и второго дистальных сегментов проволоки натяжения 42D с дистальным концом соответствующего проксимального сегмента из прочного на растяжение волокна 42P предусмотрен обжимной разъем 73 (ФИГ. 10A-10C).
Как показано на ФИГ. 1A и 1B, установленный на радиальном опорном элементе 61b половины корпуса рукоятки управления 16b и противоположный ручке отклонения 50 узел регулирования натяжения 43 включает в себя диск регулирования натяжения 80, соединенный и опосредованно сцепленный с роликовым рычагом 52 при помощи различных механизмов и деталей. Диск 80 позволяет пользователю регулировать степень усилия, необходимого для вращения ручки отклонения 50. В представленном варианте осуществления узел регулирования натяжения 43 включает в себя диск 80 (ФИГ. 12), стопорную планку 82 (ФИГ. 12), крепежный винт натяжения 83, стопорную гайку 84 и шайбу 85. Гайка 84 имеет конец 87 (ФИГ. 14) многоугольной (например, шестиугольной) формы, который сцепляется со сквозным отверстием 62b, препятствуя вращению гайки 84 во время вращения стяжного болта натяжения 83 при регулировании сжимающего усилия, под действием которого узел 43 прижимается к шайбе 85. Диск 80 имеет два штырька 86 (ФИГ. 12), проходящих через стопорную планку 82 и попадающих в направляющие желобки 88 (ФИГ. 13), образованные на внешней поверхности половины корпуса 16b, ограничивающие диапазон вращения диска 80. Пользователь вращает диск 80 и таким образом регулирует плотность затягивания или силу натяжения при поворотном движении отводящего рычага 50, по сути прижимая роликовый рычаг 52 к шайбе 85 (например, шайбе Бельвиля) и половине корпуса рукоятки управления 16b или ослабляя нажим. Соответствующий узел отклонения описан в патенте США № 7377906, текст которого полностью включен в настоящий документ путем ссылки.
В соответствии с принципами настоящего изобретения рукоятка управления содержит второй привод 26 для управления дополнительной проволокой натяжения (или сжимающей проволокой) 35a. Как показано на ФИГ. 1A, 1B и 15, второй привод 26 установлен на радиальном опорном элементе 61a между основным телом роликового рычага 52 и половиной корпуса рукоятки управления 16a рядом с ручкой отклонения 50. Второй привод 26 имеет дискообразное тело 90 с центральным сквозным отверстием 92, через которое вставляется радиальный опорный элемент 61a. Второй привод имеет удлиненный язычок 94, выступающий за пределы периметра дискообразного тела через сквозной паз 96a в половине корпуса 16a. Для удобства управления пользователем на конце язычка 94 установлена увеличенная рукоятка 98. Таким образом, привод 26 выполнен с возможностью вращения вокруг радиального опорного элемента 61a (и, следовательно, вокруг оси вращения 69) в пределах диапазона, ограниченного длиной сквозного паза 96a.
Проволока натяжения 35a для управления дополнительным элементом также входит в рукоятку управления через порт 74. В корпусе рукоятки 16b сформирован выступающий центральный разделитель 100, направляющий проволоку натяжения к приводу 26. Проволока натяжения обернута вокруг радиального опорного элемента 61a и закреплена на теле 90. В раскрытом варианте осуществления в теле 90 предусмотрено сквозное отверстие 102, вмещающее проксимальный конец проволоки натяжения 35a, завязанный узлом с целью фиксации проксимального конца на теле. Второе сквозное отверстие 103 может быть предусмотрено в качестве альтернативного места фиксации проволоки натяжения 35a.
Как показано на ФИГ. 1A, 1B и 15, третий привод 27 для управления другой дополнительной проволокой натяжения 35b установлен на противоположном радиальном опорном элементе 61b между основным телом роликового рычага 52 и половиной корпуса рукоятки управления 16b рядом с диском регулирования натяжения 80. Третий привод 27 и соответствующая проволока натяжения 35b имеют конструкцию и функцию, аналогичные конструкции и функции второго привода 26 и соответствующей проволоки натяжения 35a.
Таким образом, для любого привода 26 или 27 при вращении привода вокруг оси вращения 69 в одном направлении соответствующая проволока натяжения обматывается вокруг соответствующего радиального опорного элемента и натягивается в проксимальном направлении относительно исходного положения, приводя в действие соответствующий элемент. При вращении привода в противоположном направлении натяжение ослабляется, и проволока натяжения и соответствующий элемент возвращаются в исходное положение.
Следует понимать, что на любой из радиальных опорных элементов могут быть установлены дополнительные приводные диски. Поскольку вращение каждого привода не зависит от вращения радиального опорного элемента, на котором он установлен, пользователь может приводить в действие приводы независимо от роликового рычага и от других приводов, таким образом управляя элементом и не оказывая при этом воздействия на другие элементы.
В соответствии с принципами настоящего изобретения в дистальной части рукоятки управления предусмотрен дополнительный приводной рычаг 28. Привод 28 выполнен с возможностью вращения вокруг оси по меньшей мере параллельной продольной оси 64 рукоятки управления или даже совпадающей с ней. В варианте осуществления, представленном на ФИГ. 17, привод имеет удлиненное тело 110 с внешним концом 112, выполненным с возможностью управления пользователем для вращения внутреннего конца 114 вокруг продольного штифта 115, установленного в половине корпуса рукоятки управления 16b. Внутренний конец 114 имеет охватывающую защелку, фиксирующую штифт 115, обеспечивая при этом возможность его вращения. Внешний конец проходит через поперечный сквозной паз 116 (ФИГ. 11), сформированный в половине корпуса 16a, таким образом, пользователь имеет доступ к внешнему концу 112, диапазон вращения которого ограничен длиной паза 116. Привод 28 имеет направляющую накладку 118, проходящую в поперечном направлении относительно удлиненного тела таким образом, что привод по форме напоминает букву «t». Направляющая накладка 118 находится снаружи рукоятки управления 16 и имеет профиль (например, изогнутый), совпадающий с профилем половины корпуса 16a, обеспечивая эффективное уплотнение паза 116 и защищая внутреннюю часть рукоятки управления от внешних воздействий.
Проволока натяжения 35c для управления другим дополнительным элементом также входит в рукоятку управления через порт. Проволока натяжения направляется выступающим разделителем 100 и проходит под штифтом 115 вокруг продольного штифта 120, установленного со смещением относительно продольной оси штифта 115 в половине корпуса рукоятки управления 16a. Проксимальный конец проволоки натяжения 35c закреплен на точке сочленения 122 удлиненного тела 110 и направляющей накладки 118. Таким образом, когда пользователь поворачивает привод 28 в направлении от штифта 120, проволока натяжения 35c натягивается в проксимальном направлении относительного исходного положения, приводя элемент в действие. При повороте привода по направлению к штифту проволока натяжения и элемент возвращаются в исходное положение.
В соответствии с принципами настоящего изобретения рукоятка управления 16 включает в себя четвертый привод или приводное кольцо 130 для управления другой дополнительной проволокой натяжения 35d. В представленном на ФИГ. 11 и 18 варианте осуществления четвертый привод 130 установлен на проксимальной части 16P рукоятки управления и имеет ось вращения, совпадающую с продольной осью 64 рукоятки управления. В представленном варианте осуществления привод 130 имеет по существу цилиндрическое тело или кольцо 131 (например, в форме усеченного конуса), установленное снаружи рукоятки управления по периметру ее окружности. Круговая зона внешней поверхности половин корпуса 16a и 16b под кольцом 131 вдавлена относительно окружающей внешней поверхности и образует гнездо 132, вмещающее кольцо в продольном положении по длине рукоятки управления, при этом кольцо может вращаться по периметру окружности относительно рукоятки управления. Тело имеет прорезь 133, проходящую в направлении вдоль продольной оси, таким образом, тело может быть установлено на рукоятке управления путем надевания его на проксимальный конец рукоятки управления. Диаметрально противоположно прорези на теле сформировано отверстие 134.
Проволока натяжения 35d для управления еще одним дополнительным элементом входит в рукоятку управления через порт 74. Проволока натяжения 35d проходит вдоль продольного желобка (не показан), сформированного на внутренней поверхности половины корпуса 16a, от порта 74 вокруг отверстия 62a, обходя роликовый рычаг 52. Затем проволока натяжения 35d направляется в дистальную часть 16D рукоятки управления 16 при помощи проксимального поперечного штифта 135 и дистального поперечного штифта 136, установленных в половине корпуса 16a, и проходит через отверстие 134 в половину корпуса 16a, достигая четвертого привода 130, где проксимальный конец проволоки натяжения закреплен на приводном конце 130. Проксимальная часть проволоки натяжения 35d размещена в желобке, имеющем предварительно заданную форму (например, спиральную) и заполненном клеем и т.п., для прикрепления проксимального конца проволоки к приводному кольцу.
По мере того как пользователь поворачивает привод 130 в одном направлении проволока натяжения 35d вытягивается в проксимальном направлении через отверстие 134, оборачиваясь вокруг гнезда 132 между рукояткой управления 16 и кольцом 131, приводя элемент в движение. При вращении привода 130 в противоположном направлении натяжение проволоки 35d и элемента ослабляется, и они возвращаются в исходное положение. В гнезде 132 между рукояткой управления 16 и кольцом 131 может быть предусмотрено уплотнительное кольцо (не показано) для обеспечения трения, облегчающего самоторможение привода 130.
В процессе эксплуатации в организм пациента вводят соответствующий интродьюсер, дистальный конец которого устанавливают в желаемом положении. Примером интродьюсера, допустимого для использования совместно с настоящим изобретением, является оплетенный интродьюсер Preface.TM. производства компании Biosense Webster, Inc. (г. Даймонд-Бар, штат Калифорния). Дистальный конец интродьюсера направляется в одну из камер, например, в одно из предсердий. Катетер, выполненный в соответствии с вариантом осуществления настоящего изобретения, продвигают через интродьюсер до тех пор, пока его дистальный конец не выходит за пределы дистального конца интродьюсера. Пока катетер продвигают через интродьюсер, дистальный узел 17 находится в выпрямленном состоянии, чтобы беспрепятственно проходить через интродьюсер. После того как дистальный конец катетера устанавливают в необходимом положении, интродьюсер вытягивают в проксимальном направлении, позволяя гибкой промежуточной секции 14 и дистальному узлу 17 выходить за пределы интродьюсера, после чего дистальный узел 17 вновь приобретает исходную форму благодаря материалу с эффектом запоминания формы.
Затем пользователь может, манипулируя ручкой отклонения 50, отклонить промежуточную секцию 14. Поворот ручки отклонения 50 в одном направлении приводит к отклонению промежуточной секции 14 в этом направлении. Поворот ручки отклонения 50 в противоположном направлении приводит к отклонению промежуточной секции 14 в противоположном направлении. Кроме того, пользователь может регулировать по существу кольцевую основную область 39 дистального узла 17 путем поворота первого привода 26 в одном или в другом направлении, чтобы адаптировать ее к размеру легочной вены или другой трубчатой структуры. В описанном варианте осуществления при вращении поворотной ручки в одном направлении сжимающая проволока 35 вытягивается в проксимальном направлении для сжатия и уменьшения диаметра по существу кольцевой основной области 39, а при вращении поворотной ручки в другом направлении натяжение третьего вытягивающего элемента или сжимающей проволоки 35a ослабляется для высвобождения по существу кольцевой основной области 39 и возврата ее диаметра к исходному значению. Предпочтительно, чтобы по меньшей мере приблизительно 50%, более предпочтительно - по меньшей мере приблизительно 70%, а в наиболее предпочтительном варианте - по меньшей мере приблизительно 80% контура по существу кольцеобразной основной части соприкасалось с внутренним контуром трубчатого участка. Кольцевое расположение электродов на по существу кольцевой области 39 позволяет измерить электрическую активность по контуру трубчатой структуры, что позволяет выявлять эктопические систолы между электродами. Размер по существу кольцевой основной области 39 позволяет измерить электрическую активность по диаметру легочной вены или другой трубчатой структуры сердца или в области сердца благодаря тому, что диаметр кольцевой основной области по существу соответствует диаметру легочной вены или иной трубчатой структуры. Поскольку первый привод 26 и ручка отклонения 50 не соединены вращательно, каждый из этих элементов может функционировать независимо от другого.
В соответствии с принципами настоящего изобретения преимущество конструкции первого и второго приводов заключается в возможности встраивать их в существующие рукоятки управления, включающие роликовый рычаг 52, без существенных модификаций конструкции рукоятки управления или помех при эксплуатации. Аналогичным образом, третий и четвертый приводы могут быть встроены в существующие рукоятки управления.
Предшествующее описание изложено со ссылкой на конкретные предпочтительные примеры вариантов осуществления изобретения. Специалистам в области техники и технологии, к которой принадлежит настоящее изобретение, будет понятно, что описанная конструкция допускает модификации и изменения, не нарушающие принципы и сущность настоящего изобретения и не выходящие за рамки его объема. Например, катетер может быть выполнен таким образом, что третья проволока натяжения будет обеспечивать выдвижение и втягивание другого компонента, такого как направляющая проволока или игла. Специалисту в данной области техники понятно, что фигуры необязательно представлять в определенном масштабе. Таким образом, предшествующее описание не следует толковать как относящееся только к конкретным конструкциям, описанным и представленным на сопроводительных фигурах. Описание согласуется и подкрепляет нижеизложенную формулу изобретения, отражающую полный объем настоящего изобретения.
Изобретение относится к медицинской технике, а именно к рукоятке управления для медицинских устройств, в частности к рукоятке управления с механизмами для управления множеством проволок натяжения. Рукоятка управления медицинским устройством, имеющим отклоняемую часть, по меньшей мере первый элемент, управляемый пользователем, по меньшей мере одну отклоняющую проволоку натяжения, проходящую между рукояткой управления и отклоняемой частью, и по меньшей мере проволоку натяжения первого элемента, проходящую между рукояткой управления и первым элементом, для управления первым элементом, при этом рукоятка управления содержит корпус и узел отклонения. Узел отклонения содержит привод отклонения, выполненный с возможностью вращения пользователем, роликовый рычаг и приводной диск. Роликовый рычаг содержит основное тело и радиальный опорный элемент между основным телом и корпусом. Роликовый рычаг выполнен с возможностью вращения вокруг оси вращения в ответ на поворот привода отклонения. К роликовому рычагу присоединена по меньшей мере одна отклоняющая проволока натяжения. Поворот роликового рычага приводит в действие по меньшей мере одну отклоняющую проволоку натяжения. Приводной диск выполнен с возможностью вращения пользователем вокруг оси вращения. Проволока натяжения первого элемента присоединена к приводному диску, и поворот приводного диска приводит в действие проволоку натяжения первого элемента. Приводной диск размещен на радиальном опорном элементе и выполнен с возможностью наматывания проволоки натяжения первого элемента на радиальный опорный элемент при вращении пользователем приводного диска, причем вращение приводного диска и вращение роликового рычага осуществляются независимо друг от друга. Изобретение способно обеспечить управление несколькими проволоками натяжения при помощи механизмов, занимающих минимальное пространство внутри рукоятки управления и имеющих конструкцию, легко приспосабливаемую к существующим рукояткам управления. 8 з.п. ф-лы, 19 ил.
1. Рукоятка управления медицинским устройством, имеющим отклоняемую часть, по меньшей мере первый элемент, управляемый пользователем, по меньшей мере одну отклоняющую проволоку натяжения, проходящую между рукояткой управления и отклоняемой частью, и по меньшей мере проволоку натяжения первого элемента, проходящую между рукояткой управления и первым элементом, для управления первым элементом, при этом рукоятка управления содержит:
корпус,
узел отклонения, содержащий:
привод отклонения, выполненный с возможностью вращения пользователем,
роликовый рычаг, содержащий основное тело и радиальный опорный элемент между основным телом и корпусом, причем роликовый рычаг выполнен с возможностью вращения вокруг оси вращения в ответ на поворот привода отклонения, и к роликовому рычагу присоединена по меньшей мере одна отклоняющая проволока натяжения, и поворот роликового рычага приводит в действие по меньшей мере одну отклоняющую проволоку натяжения, и
приводной диск, выполненный с возможностью вращения пользователем вокруг оси вращения, причем проволока натяжения первого элемента присоединена к приводному диску и поворот приводного диска приводит в действие проволоку натяжения первого элемента,
при этом приводной диск размещен на радиальном опорном элементе и выполнен с возможностью наматывания проволоки натяжения первого элемента на радиальный опорный элемент при вращении пользователем приводного диска, причем вращение приводного диска и вращение роликового рычага осуществляются независимо друг от друга.
2. Рукоятка управления по п. 1, дополнительно содержащая:
приводной рычаг, выполненный с возможностью вращения вокруг оси, по существу параллельной продольной оси рукоятки управления; и
проволоку натяжения второго элемента, проходящую между рукояткой управления и вторым элементом медицинского устройства и соединенную с приводным рычагом,
при этом поворот приводного рычага приводит в действие проволоку натяжения второго элемента.
3. Рукоятка управления по п. 2, в которой проволока натяжения второго элемента проходит по направлению к приводному рычагу из точки углового смещения от оси вращения приводного рычага.
4. Рукоятка управления по п. 2, в которой корпус имеет отверстие, а приводной рычаг имеет конец, проходящий через отверстие наружу корпуса, при этом конец выполнен с возможностью управления пользователем.
5. Рукоятка управления по п. 4, в которой приводной рычаг имеет направляющую накладку, закрывающую отверстие.
6. Рукоятка управления по п. 2, в которой приводной рычаг размещен вдоль рукоятки управления проксимально относительно приводного диска.
7. Рукоятка управления по п. 1, дополнительно содержащая:
приводное кольцо, размещенное по периметру окружности корпуса и выполненное с возможностью вращения вокруг продольной оси рукоятки управления; и
проволоку натяжения второго элемента, проходящую между рукояткой управления и вторым элементом медицинского устройства,
при этом поворот приводного кольца вокруг оси приводит в действие проволоку натяжения второго элемента.
8. Рукоятка управления по п. 1, в которой приводной диск имеет язычок, выполненный с возможностью вращения диска пользователем вокруг оси вращения, корпус выполнен с отверстием и язычок проходит через отверстие из корпуса наружу.
9. Рукоятка управления по п. 1, дополнительно содержащая:
второй приводной диск, выполненный с возможностью вращения пользователем вокруг оси вращения; и
проволоку натяжения второго элемента, соединенную со вторым приводным диском, причем поворот второго привода приводит в действие вторую проволоку натяжения,
при этом роликовый рычаг имеет второй радиальный опорный элемент, противоположный радиальному опорному элементу, и второй приводной диск установлен на втором радиальном опорном элементе и выполнен с возможностью наматывания проволоки натяжения второго элемента на втором радиальном опорном элементе при вращении пользователем второго приводного диска, причем вращение каждого из первого приводного диска и второго приводного диска и вращение роликового рычага осуществляются независимо друг от друга.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГИБКИМ УЧАСТКОМ НА ДИСТАЛЬНОМ КОНЦЕ УДЛИНЕННОГО ИНСТРУМЕНТА, УПРАВЛЯЕМЫЙ ПРОВОЛОЧНЫЙ НАПРАВИТЕЛЬ И СПОСОБ УПРАВЛЕНИЯ ПРОВОЛОЧНЫМ НАПРАВИТЕЛЕМ | 1990 |
|
RU2074010C1 |
| Предохранительное приспособление к волочильным станкам для предотвращения произвольного включения тянульного барабана | 1933 |
|
SU34502A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |

