Сущность изобретения
Настоящее изобретение относится к подповерхностной системе для сбора мусорных контейнеров с боковой стороны. Она содержит подземный бункер, мусорный контейнер, содержащий подвижные боковые стойки, мусороприемник, одну внутреннюю платформу, временно поддерживающую контейнер, и автоматически открывающуюся и закрывающуюся крышку. Всеми действиями управляют дистанционно. Контейнер перемещается и берется только автоматическим подъемником боковой загрузки, установленным на мусоровозе.
Уровень техники
Приведены примеры известных из уровня техники системы для подземного хранения контейнеров для твердых отходов.
В подповерхностных системах для сбора мусора используются контейнеры, которые берут с помощью крана, установленного в мусоровозе с верхней или задней загрузкой, или с помощью автоматического подъемника, установленного в мусоровозе с боковой загрузкой.
Контейнеры для сбора с верхней или боковой загрузкой размещены в подземном бункере, закрытом крышкой. После открывания крышки, вручную или автоматически, контейнеры собираются с помощью крана, установленного на мусоровозе. После размещения контейнера над мусоровозом или в заднем его конце, он открывается снизу или переворачивается для выгрузки мусора в мусоровоз.
В патентах Португалии 101968, 102148, 102748, патентах Испании 2036916, 2138480, 2153733, 2228225, 2228226 и документе WO 2010/041969 описаны отличия подповерхностных систем для сбора мусора, в которых используются контейнеры, которые собирают с помощью крана.
В других системах применяются мусоровозы с боковой загрузкой, автоматически соединяющиеся с контейнером. Подповерхностные контейнеры для сбора с боковой загрузкой помещаются на подземную платформу, расположенную под крышкой. При приведении в действие гидравлического цилиндра платформы нижняя конструкция поднимается, толкает крышку, которая открывается на угол до 90°, и контейнеры (1) поднимаются до уровня улицы, позволяя осуществить выгрузку мусора в автомобиль сбоку. В патенте США 2008/0203097 и патентах Испании 200400634, 200501670 и 200600453 описаны отличия подповерхностных систем для сбора мусора из уровня техники, в которых применяются контейнеры, собираемые подъемниками с боковой загрузкой.
Основные недостатки существующих подповерхностных систем для сбора с боковой загрузкой состоят в том, что: вся система является тяжелой, и ее трудно транспортировать; все механизмы, установленные на подземной гидравлической платформе, требуют постоянного технического обслуживания, и невозможно использовать альтернативные источники энергии из-за электропитания, необходимого для открывания всей системы.
Краткое описание чертежей
Для лучшего понимания настоящего изобретения ниже будет приведено его подробное описание со ссылками на прилагаемые не имеющие ограничительного характера чертежи, на которых
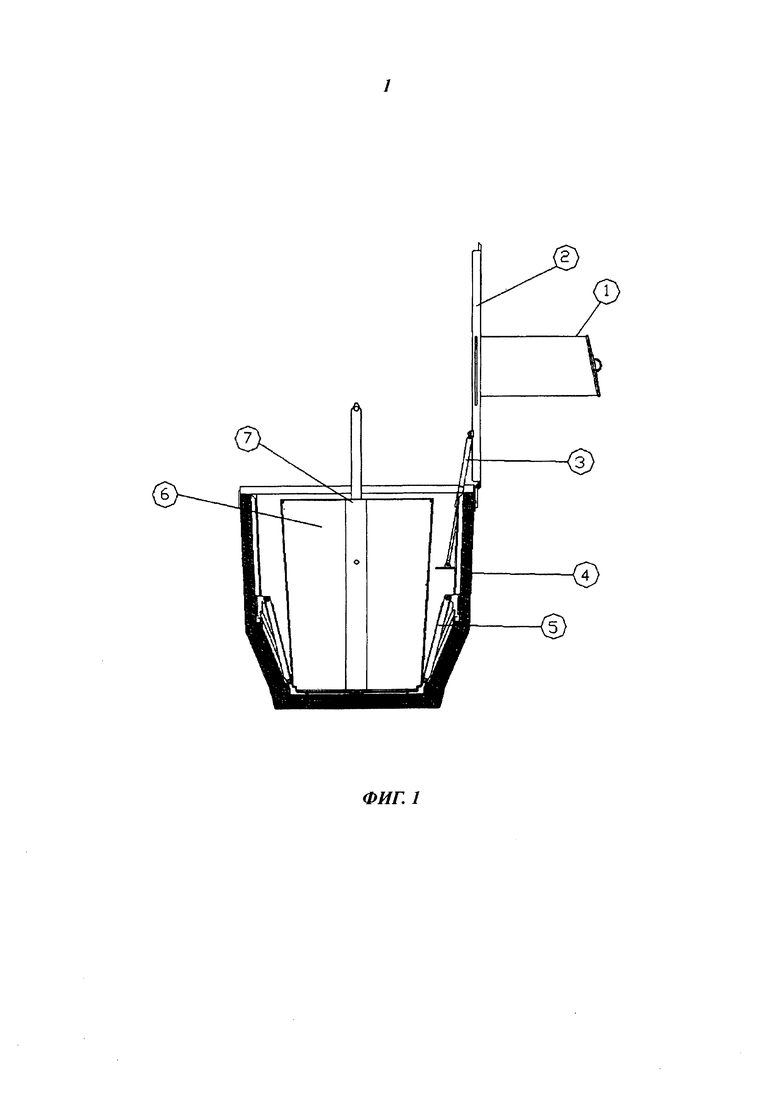
на фиг. 1 схематически представлен разрез подповерхностной системы с полностью открытой крышкой и подвижными боковыми стойками контейнера снаружи бункера;
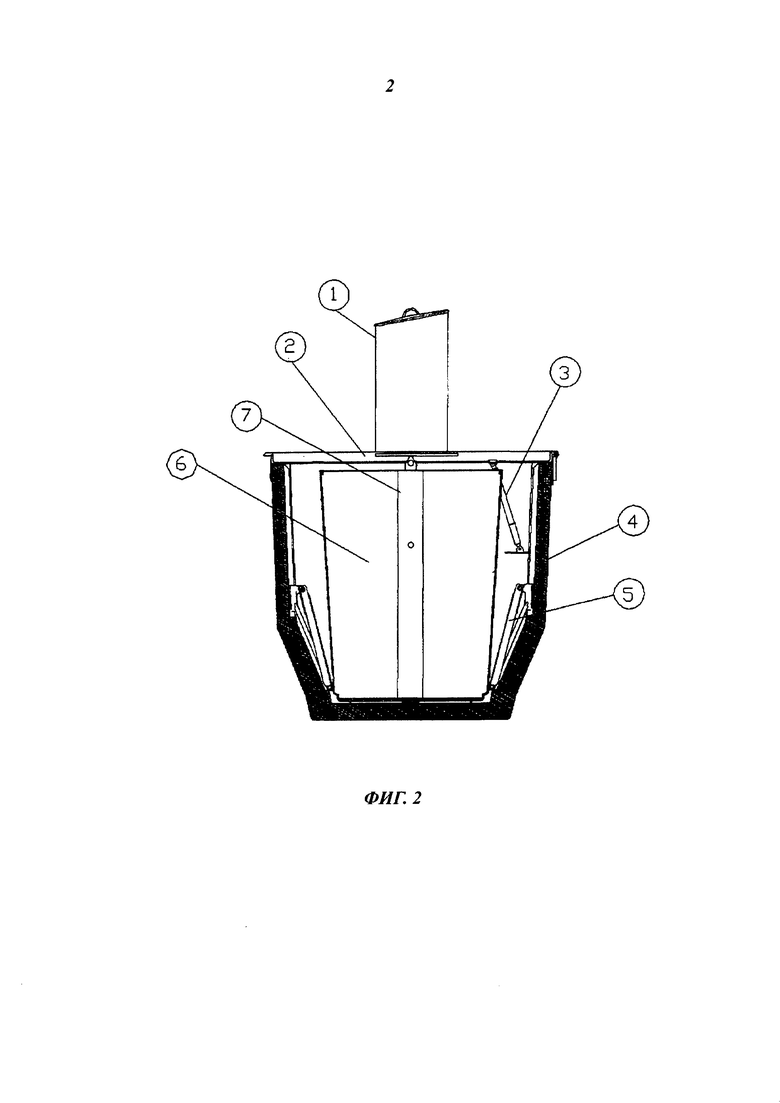
на фиг. 2 схематически представлен разрез подповерхностной системы с закрытой крышкой и подвижными боковыми стойками контейнера, закрытыми в бункере;
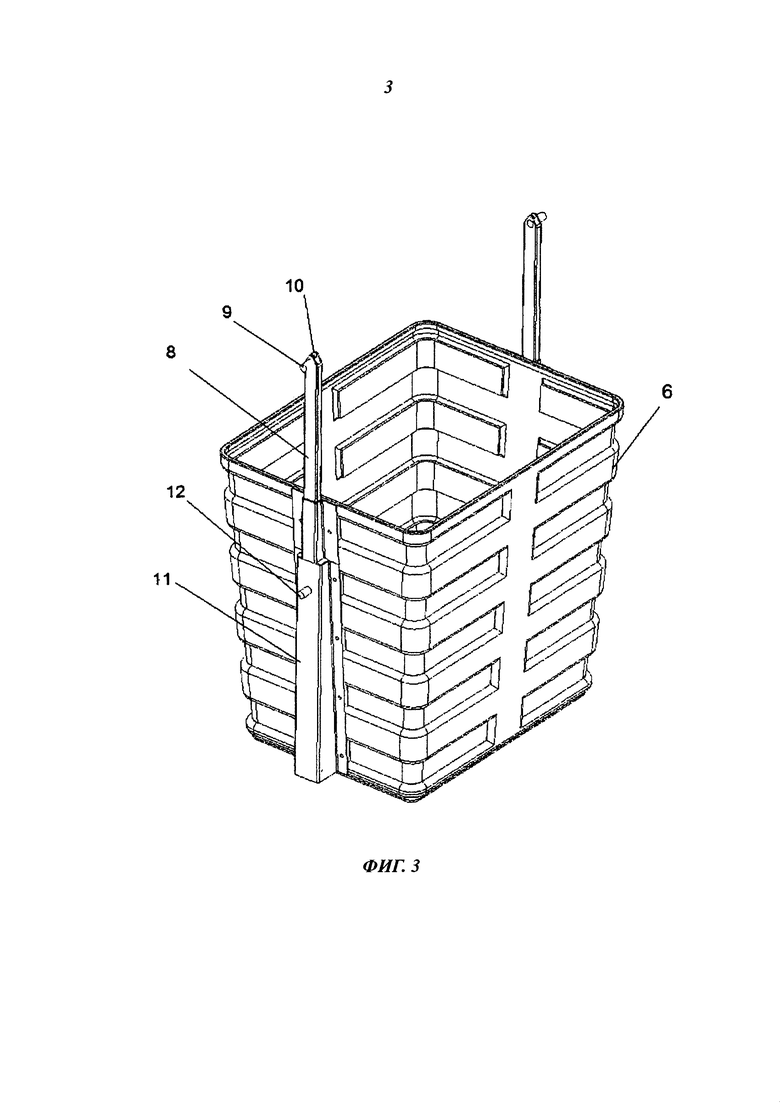
на фиг. 3 представлен общий вид мусорного контейнера с боковыми механизмами;
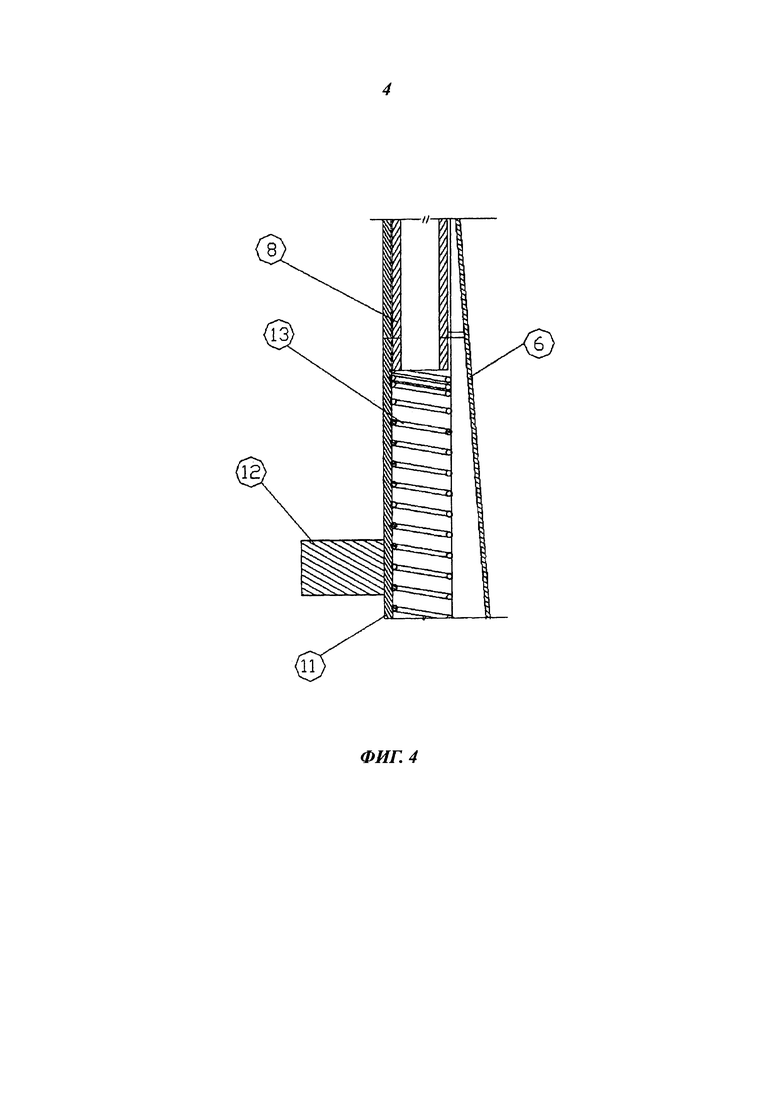
на фиг. 4 представлен фрагмент механизма, обеспечивающего вертикальное перемещение подвижных боковых стоек, установленных на обеих сторонах контейнера. Пружина, установленная внутри неподвижной стойки, начинает сжиматься, и подвижная стойка перемещается внутри неподвижной стойки;
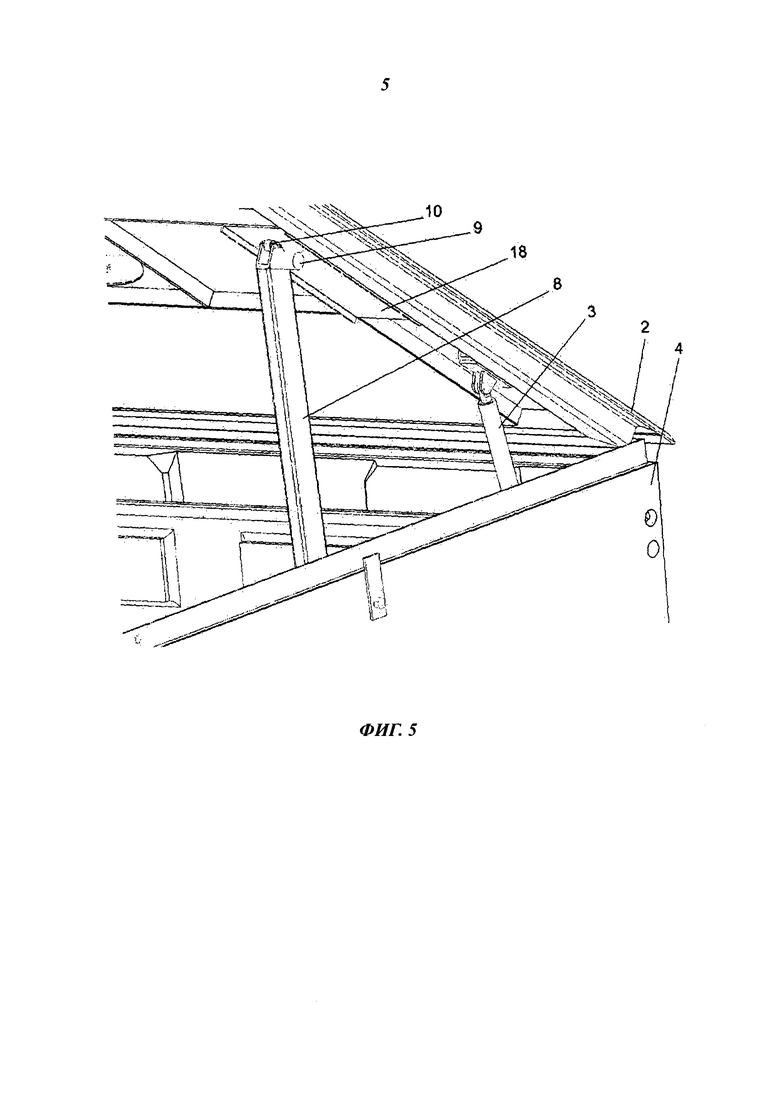
на фиг. 5 представлена фрагмент соединения между роликом, расположенным в подвижных стойках контейнера, и каналом, расположенным в крышке;
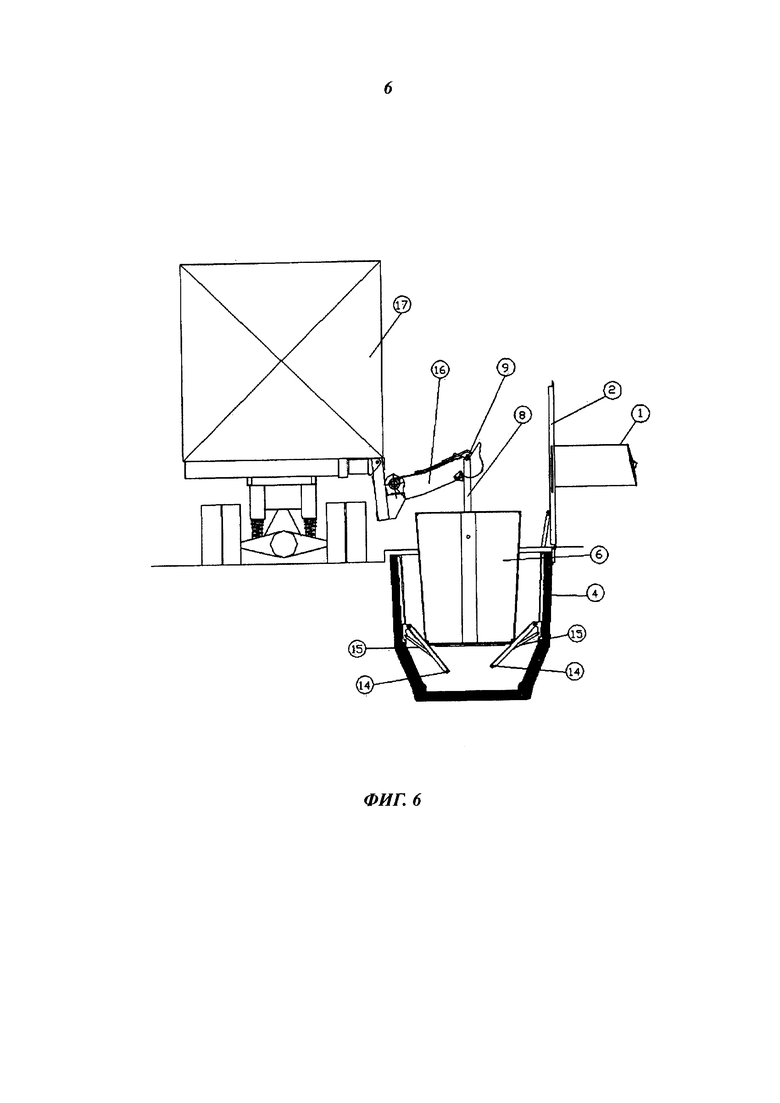
на фиг. 6 схематически представлен разрез подповерхностной системы с открытой крышкой и контейнером, поднятым внутри бункера автоматическим подъемником боковой загрузки мусоровоза. Подъемник мусоровоза соединен с пальцами, расположенными в подвижных стойках;
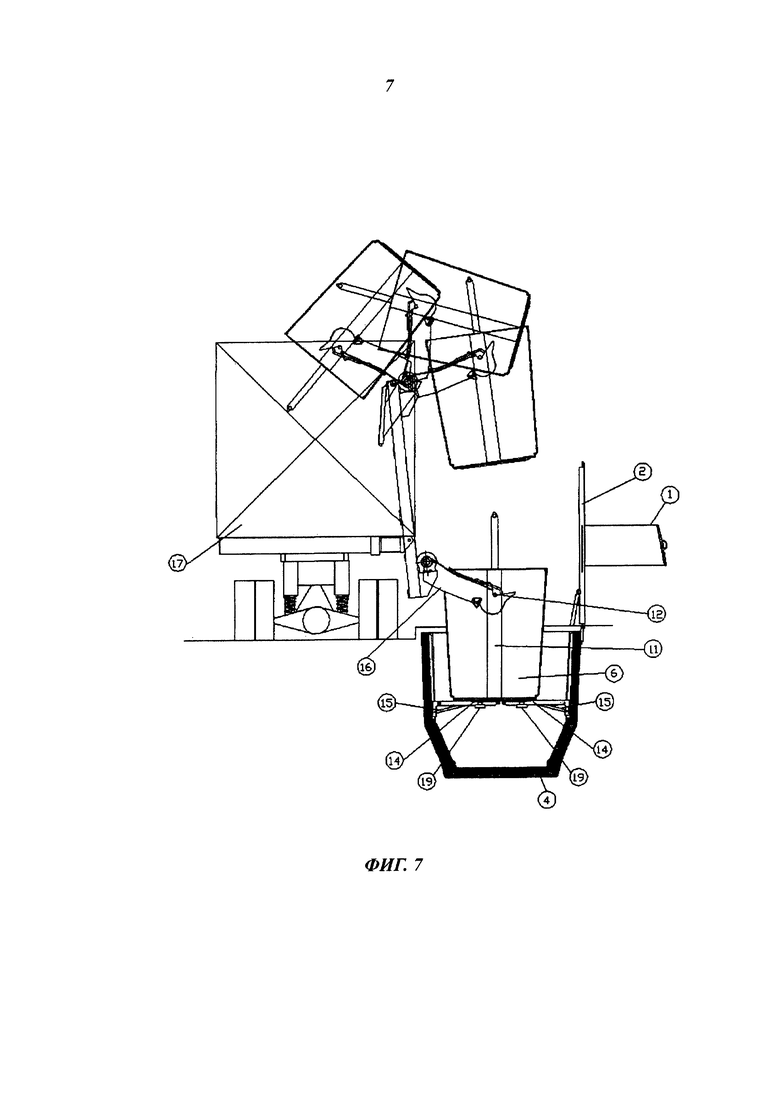
на фиг. 7 схематически представлен разрез подповерхностной системы с открытой крышкой и контейнером, погружаемым автоматическим подъемником боковой загрузки мусоровоза. Для выгрузки мусора в транспортное средство подъемник мусоровоза соединен с пальцами, расположенными в неподвижных стойках;
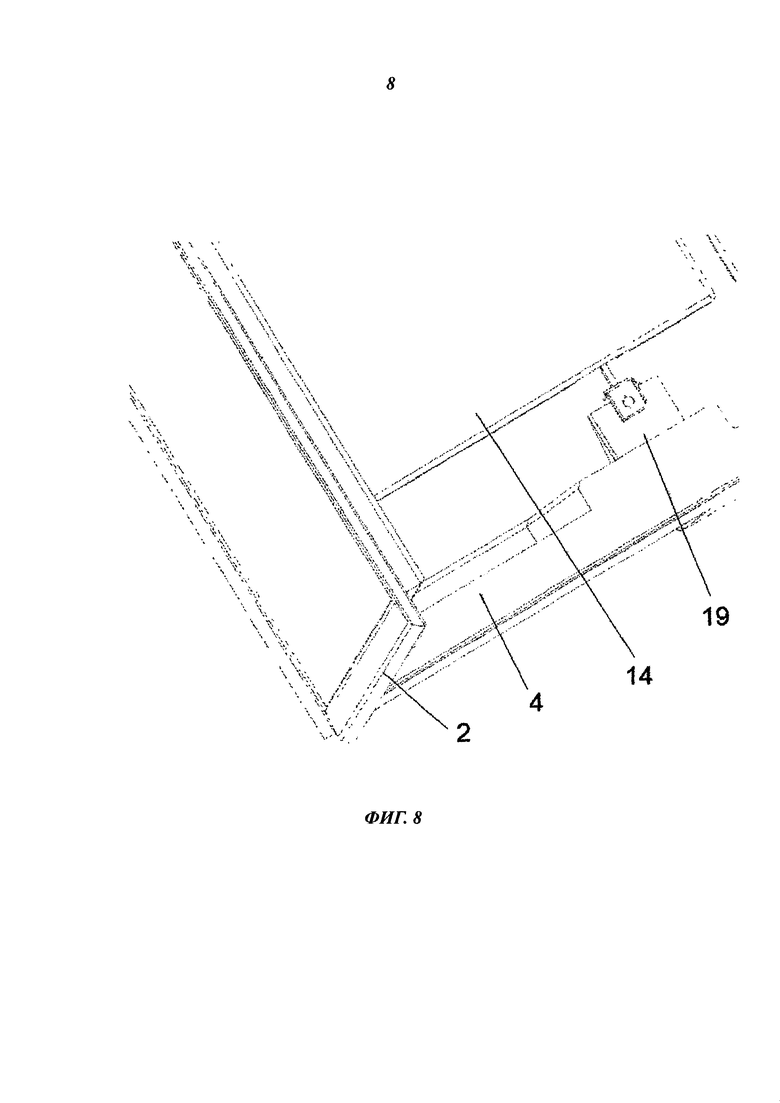
на фиг. 8 представлена деталь электромеханического запора, закрепленного в бункере для удержания одного или двух подвижных элементов внутренней платформы в горизонтальном положении.
Подробное раскрытие изобретения
Подповерхностная мусорная система для сбора с боковой загрузкой в соответствии с настоящим изобретением содержит поддерживающую покрытие крышку (2), содержащую две или более петли и открывающуюся на угол до 90° с помощью одного или более электрических или электрогидравлических цилиндров (3) в сочетании с другими газовыми цилиндрами.
Газовые и электрические или электрогидравлические цилиндры (3), прикрепленные к подземному бункеру (4) и крышке (2), содержат электрическую приводную систему, обеспечивающую автоматическое открывание крышки до угла 90° и ее автоматическое закрывание. Электрические или электрогидравлические цилиндры (3) могут снабжаться энергией от системы солнечного электропитания, содержащей одну или более фотоэлектрических панелей, и всеми действиями крышки (2) дистанционно управляют одним устройством с помощью кнопок непрерывного управления.
На поверхности, соединенной с крышкой, имеется мусороприемник (1), расположенный на высоте, составляющей приблизительно 90 см, предназначенный для приема отходов.
Внутри подземного бункера (4) расположен контейнер (6) для сбора мусора и одна внутренняя платформа (5). Внутренняя платформа (5) прикреплена к бункеру (4) и поворачивается из исходного положения, соединенного со стенками бункера и со стенками контейнера (6), в горизонтальное положение. Мусорный контейнер (6) собирают с помощью подъемника (16) боковой загрузки, установленного в мусоровозе (17).
На фиг. 1 и 2 представлена подповерхностная система, содержащая мусороприемник (1), крышку (2), открывающуюся до угла 90°, контейнер (6) для сбора мусора, подземный бункер (4) и внутреннюю платформу (5), прикрепленную к подземному бункеру (4). Внутренняя платформа (5) расположена между стенками бункера (4) и стенками контейнера (6).
Контейнер (6) содержит механизмы (7), установленные на двух противоположных сторонах, каждый из которых состоит из:
- одной подвижной стойки (8) с пальцем (9) для автоматического соединения с подъемником (16) боковой загрузки и ролик (10), расположенный вверху указанной подвижной стойки (8);
- неподвижной стойки (11) с другим пальцем (12) для другого автоматического соединения с подъемником (16) боковой загрузки.
На фиг. 1 и 3 представлен контейнер (6) с открытыми подвижными боковыми стойками (8).
В каждом из механизмов (7) контейнера (6) имеется пружина (13) внутри неподвижной стойки (11), обеспечивающая механизм перемещения:
- когда контейнер (6) находится внутри бункера (4), за счет закрытой крышки (2) подвижная стойка (8) остается внутри неподвижной стойки (11), и пружина (13) сжата;
- когда крышка (2) открывается, ролик (10) подвижной стойки (8) перемещается в одном канале (18), расположенном в крышке (2), пружина (13) расширяется, и подвижная стойка (8) перемещается вертикально из бункера.
На фиг. 4 представлена пружина (13), установленная внутри неподвижной стойки (11), и подвижная стойка (8), перемещающаяся внутри неподвижной стойки (11).
На фиг. 5 представлено соединение между роликом (10), расположенным в подвижных стойках (8) контейнера (6), и каналом (18), расположенным в крышке (2).
Когда две подвижные стойки (8) контейнера (6) расположены снаружи бункера (4), подъемник (16) боковой загрузки мусоровоза (17) соединяется с пальцами (9) двух подвижных стоек (8), чтобы поднять контейнер (6).
На фиг. 6 представлен контейнер (6), поднимаемый внутри бункера (4) автоматическим подъемником (16) боковой загрузки мусоровоза (17). Подъемник (16) мусоровоза (17) соединяется с пальцами (9), расположенными в подвижных стойках (8).
При подъеме контейнера (6) два подвижных элемента (14) внутренней платформы (5), находящейся между стенками бункера (4) и стенками контейнера (6), поворачиваются в горизонтальное положение под действием газового амортизатора (15), прикрепленного к бункеру (4) и к каждому из двух подвижных элементов (14). Когда два подвижных элемента (14) оказываются в горизонтальном положении, каждый из них сближается с одним из двух электромеханических запоров (19), прикрепленных к противоположным сторонам бункера (4). После приближения к внутренней платформе (5) подъемник (16) боковой загрузки отсоединяется от пальцев (9) двух подвижных стоек (8), чтобы отпустить контейнер (6) на указанную внутреннюю платформу (5), временно поддерживающую его.
На фиг. 8 можно видеть один электромеханический замок (19), закрепленный в бункере для удержания одной стороны одного подвижного элемента (14) внутренней платформы (5) в горизонтальном положении.
Когда контейнер (6) временно опирается на внутреннюю платформу (5), подъемник (16) боковой загрузки мусоровоза (17) соединяется с пальцами (12) двух неподвижных стоек (11) контейнера (6), чтобы поднять и перевернуть контейнер (6) для его опорожнения в мусоровоз (17).
После опорожнения контейнера подъемник (16) боковой загрузки перемещает контейнер (6) в то же положение, при котором он временно опирается на внутреннюю платформу (5), и отсоединяется от пальцев (12) двух неподвижных стоек (11).
Четыре электромеханических запора (19), которые запирают два подвижных элемента (14) и временно поддерживают контейнер (6) в горизонтальном положении, открываются электрическим контактом, обеспечивая вертикальное гравитационное перемещение контейнера (6) и последующее складывание подвижных элементов (14) внутренней платформы (5) вплотную к стенкам бункера (4). Открыванием электромеханических замков 19 управляют дистанционно.
На фиг. 7 можно видеть контейнер (6), поднимаемый автоматическим подъемником (16) боковой загрузки мусоровоза (17). Подъемник (16) мусоровоза (17) соединяется с пальцами (12), расположенными в неподвижных стойках (11), чтобы выгрузить мусор в автомобиль. Когда контейнер находится внутри бункера, оператор дистанционно управляет электрическими или электрогидравлическими цилиндрами для закрывания крышки (2), и затем ролик (10) подвижной стойки (8) вертикально перемещается во внутреннюю часть бункера (4).
Специалисту в данной области техники ясно, что возможны различные модификации без отклонения от объема изобретения, раскрытого в нижеследующей формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОДЗЕМНОГО ХРАНЕНИЯ МУСОРА И ДВУХЪЯРУСНЫЙ ПОДЪЕМНИК ДЛЯ НЕЕ | 2020 |
|
RU2750987C1 |
| СИСТЕМА ПОДЗЕМНОГО ХРАНЕНИЯ МУСОРА | 2020 |
|
RU2739438C1 |
| ПОДЗЕМНАЯ СИСТЕМА ДЛЯ СБОРА МУСОРА | 2008 |
|
RU2492127C2 |
| СИСТЕМА ПОДЗЕМНОГО ХРАНЕНИЯ МУСОРА | 2020 |
|
RU2747519C1 |
| СИСТЕМА ПОДЗЕМНОГО ХРАНЕНИЯ МУСОРА | 2019 |
|
RU2739439C1 |
| МУСОРОВОЗ ДЛЯ ПЕРЕВОЗКИ ТВЕРДЫХ БЫТОВЫХ ОТХОДОВ ОБЪЁМОМ ОТ 10 ДО 25 КУБ. М С ФУНКЦИЕЙ ИЗМЕЛЬЧЕНИЯ И ПРЕССОВАНИЯ РОТОРНОГО ТИПА | 2023 |
|
RU2803651C1 |
| БЫСТРОВОЗВОДИМЫЙ МОБИЛЬНЫЙ УЗЕЛ СОРТИРОВКИ ОТХОДОВ БЛОК-МОДУЛЬНОГО ТИПА | 2024 |
|
RU2832294C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПРИЕМА И ТРАНСПОРТИРОВКИ МУСОРА | 1993 |
|
RU2119883C1 |
| Машина для перевозки бытовых отходов 1 и 2 категорий с механизмом брикетирования | 2022 |
|
RU2804277C1 |
| Мусоровоз | 2024 |
|
RU2825896C1 |
Изобретение относится к оборудованию для сбора мусорных контейнеров. Система для сбора мусора содержит площадку с мусороприемником (1), расположенным на высоте 90 см, и крышку (2), открывающуюся на угол до 90° посредством одного или более электрических или электрогидравлических цилиндров в сочетании с газовыми цилиндрами. Система содержит подземный бункер (4), внутреннюю платформу и контейнер (6) для сбора мусора с помощью подъемника (16) боковой загрузки мусоровоза (17). Контейнер с двух противоположных сторон содержит по механизму, каждый из которых имеет одну подвижную стойку (8) с пальцем (9) для автоматического соединения с подъемником боковой загрузки и ролик, расположенный вверху подвижной стойки (8), неподвижную стойку с другим пальцем для автоматического соединения с подъемником боковой загрузки. Упрощается транспортирование системы. 6 з.п. ф-лы, 8 ил.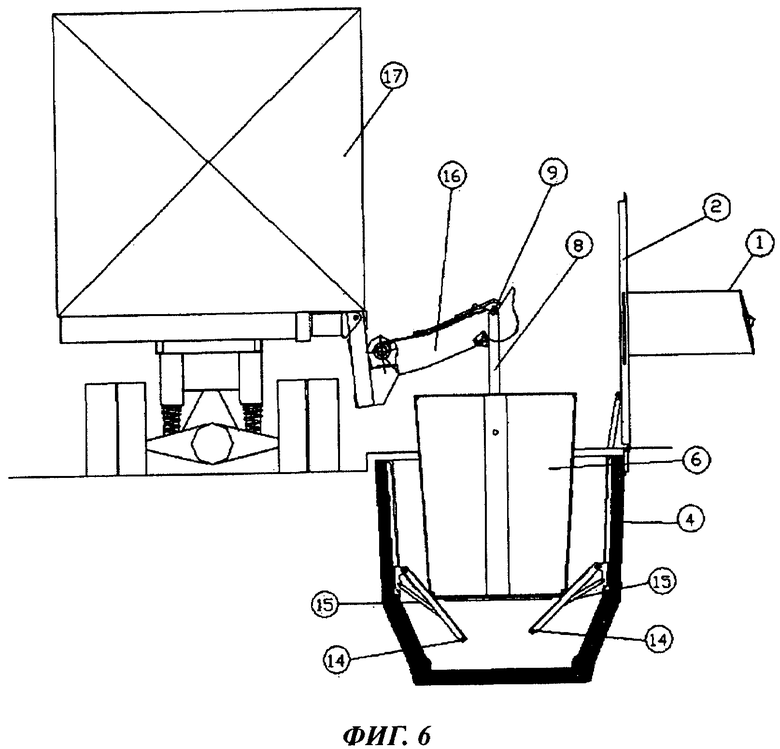
1. Подповерхностная система для сбора мусора, на поверхности содержащая площадку с мусороприемником (1), расположенным на высоте 90 см, и крышку (2), поддерживающую покрытие, открывающуюся на угол до 90° посредством одного или более электрических или электрогидравлических цилиндров (3) в сочетании с газовыми цилиндрами, а в подповерхностной зоне содержащая подземный бункер (4), внутреннюю платформу (5) и контейнер (6) для сбора мусора с помощью подъемника (16) боковой загрузки мусоровоза (17), отличающаяся тем, что контейнер (6) с двух противоположных сторон содержит по механизму (7), причем каждый механизм содержит: одну подвижную стойку (8) с пальцем (9) для автоматического соединения с подъемником (16) боковой загрузки и ролик (10), расположенный вверху подвижной стойки (8), неподвижную стойку (11) с другим пальцем (12) для другого автоматического соединения с подъемником (16) боковой загрузки.
2. Подповерхностная система для сбора мусора по п. 1, в которой между неподвижной стойкой (11) и подвижной стойкой (8) каждого из двух механизмов (7) внутри указанной неподвижной стойки (11) расположена пружина (13), обеспечивающая следующие действия механизма: при нахождении контейнера (6) внутри бункера (4) за счет веса закрытой крышки (2) подвижные стойки (8) находятся внутри неподвижных стоек (11), и пружины (13) сжаты, при открывании крышки (2) происходит перемещение роликов (10) подвижных стоек (8) по расположенным в крышке (2) каналам (18), расширение пружин (13), и вертикальное перемещение подвижных стоек (8) наружу из бункера, и при закрывании крышки происходит перемещение роликов (10) подвижных стоек (8) в обратном направлении по тем же каналам (18) крышки (2), сжатие пружин (13), и вертикальное перемещение подвижных стоек (8) во внутреннюю часть бункера (4).
3. Подповерхностная система для сбора мусора по п. 1, в которой внутренняя платформа (5) содержит: два подвижных элемента (14), которые прижаты к стенке бункера (4), когда контейнер (6) целиком находится внутри бункера (4), и повернуты в горизонтальное положение при вертикальном подъеме контейнера (6), газовые амортизаторы (15), прикрепленные к бункеру (4) и к каждому из двух подвижных элементов (14), обеспечивающие требуемое усилие для автоматического поворота внутренней платформы (5) при подъеме контейнера (6), электромеханические запоры (19), прикрепленные к противоположным сторонам бункера (4) и обеспечивающие сближение двух подвижных элементов (14) в горизонтальном положении при подъеме контейнера (6).
4. Подповерхностная система для сбора мусора по любому из пп. 1-3, в которой подъемник (16) боковой загрузки мусоровоза (17), чтобы осуществить подъем контейнера (6), выполнен с возможностью соединения с пальцами (9) двух подвижных стоек (8), расположенных снаружи бункера (4), когда крышка (2) полностью открыта, при этом при прохождении контейнером (6) горизонтального положения внутренней платформы (5), два подвижных элемента (14) будут закреплены двумя электромеханическими запорами (19), и подъемник (16) боковой загрузки будет отсоединен от пальцев (9) двух подвижных стоек (8), чтобы отпустить контейнер (6) на внутреннюю платформу (5), временно поддерживающую контейнер.
5. Подповерхностная система для сбора мусора по п. 1, в которой, когда контейнер (6) временно опирается на внутреннюю платформу (5), имеется соединение подъемника (16) боковой загрузки мусоровоза (17) с пальцами (12) двух неподвижных стоек (11) контейнера (6), обеспечивающее возможность подъема и перевертывания контейнера (6) для его опорожнения в мусоровоз (17), после опорожнения контейнера (6) и его возвращения в то же положение, в котором он временно опирается на внутреннюю платформу (5), указанный подъемник (16) боковой загрузки будет отсоединен от пальцев (12) двух неподвижных стоек (11).
6. Подповерхностная система для сбора мусора по п. 4, в которой электромеханические запоры (19), запирающие два подвижных элемента (14) и временно поддерживающие контейнер (6) в горизонтальном положении, выполнены с возможностью их открытия посредством электрического контакта с помощью дистанционного управления, чтобы обеспечить вертикальное гравитационное перемещение контейнера (6) и последующий поворот подвижных элементов (14) внутренней платформы (5) к стенке бункера (4).
7. Подповерхностная система для сбора мусора по п. 1, в которой электрогидравлические цилиндры (3) выполнены с возможностью их снабжения энергией от системы солнечного электропитания, содержащей одну или более фотоэлектрических панелей, при этом крышка (2) выполнена с возможностью дистанционного управления ее действиями с использованием одного устройства с помощью кнопок непрерывного управления.
| WO 2010041969 A1, 15.04.2010 | |||
| US 2008203097 A1, 28.08.2008 | |||
| Способ холодной высадки утолщений в средней части стержня | 1980 |
|
SU893369A1 |
| Измерительный прибор для определения суммы и разности двух векторов | 1949 |
|
SU81174A1 |
| КОМПЛЕКС ДЛЯ ПОДЗЕМНОГО СБОРА И ХРАНЕНИЯ ТВЕРДЫХ БЫТОВЫХ ОТХОДОВ | 2009 |
|
RU2408516C1 |

