Область техники
[0001] Настоящее раскрытие относится к способу управления сцеплением и устройству управления сцеплением для транспортного средства с приводом на четыре колеса, в котором фрикционная муфта сцепления обеспечена для системы передачи крутящего момента привода на дополнительные ведущие колеса.
Уровень техники
[0002] В прошлом известны транспортные средства с приводом на четыре колеса, имеющие переднеприводную основу, в которых сцепление с электронным управлением (в качестве одного примера фрикционной муфты сцепления) обеспечено для системы передачи крутящего момента на задние колеса (например, см. патентный документ 1). Чтобы улучшить отклик передачи крутящего момента привода на задние колеса, когда такое транспортное средство с приводом на четыре колеса начинает движение вверх по склону, сцепление с электронным управлением выводится из зацепления, когда взаимное расположение двух кулачковых элементов находится в направлении, противоположном выбранной позиции включения передачи.
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1: Опубликованная заявка на патент Японии № 2010-254135
Описание изобретения
Проблемы, решаемые изобретением
[0004] Патентный документ 1 не содержит конкретного раскрытия относительно способа применения начального крутящего момента, который представляет собой крутящий момент зацепления сцепления, возникающий, когда транспортное средство стоит; есть основание для рассмотрения методов для этого. Начальный крутящий момент в состоянии остановки прикладывается с нулевым крутящим моментом или с очень низким крутящим моментом для вывода из зацепления сцепления с электронным управлением. В это время, когда выполняется операция нажатия педали акселератора, чтобы снова начать движение из состояния остановки, в то время как сохраняется положение включения передачи «движение», крутящий момент от источника привода передается только на передние колеса, которые являются основными ведущими колесами, и проскальзывание привода происходит в передних колесах в начале операции нажатия педали акселератора. Следовательно, проблема заключается в том, что даже если крутящий момент команды привода на четыре колеса (4WD) выводится на сцепление с электронным управлением в то же время, когда выполняется операция нажатия педали акселератора, увеличение крутящего момента зацепления (крутящий момент, передаваемый на задние колеса) относительно крутящего момента команды задерживается, и отклик передачи крутящего момента на задние колеса, которые являются дополнительными ведущими колесами, уменьшается.
[0005] Настоящее раскрытие направлено на вышеописанную проблему, поскольку целью настоящего раскрытия является обеспечение отклика передачи крутящего момента на дополнительные ведущие колеса относительно операции нажатия педали акселератора, когда транспортное средство снова начинает движение из состояния остановки.
Средства, используемые для решения вышеперечисленных проблем
[0006] Для достижения вышеуказанной цели настоящее раскрытие обеспечивает то, что либо левые и правые передние колеса, либо левые и правые задние колеса сконфигурированы как основные ведущие колеса, соединенные с источником привода, и другие из левого и правого передних колес а левого и правого задних колес выполнены в виде дополнительных ведущих колес, соединенных через фрикционную муфту сцепления с источником привода.
Когда транспортное средство начинает движение из-за операции нажатия педали акселератора, фрикционная муфта сцепления приводится в зацепление, в результате чего крутящий момент привода от источника привода распределяется на основные ведущие колеса и дополнительные ведущие колеса.
В этом способе управления сцеплением транспортного средства с приводом на четыре колеса, когда транспортное средство переключается из состояния движения в состояние остановки при сохранении положения включения передачи «движение», выполняется управление, чтобы прикладывать начальный крутящий момент в качестве управления крутящим моментом зацепления фрикционной муфты сцепления при остановке транспортного средства.
Величина начального крутящего момента устанавливается равной величине, которая необходима для поддержания состояния кручения системы привода посредством крутящего момента, передаваемого в систему привода дополнительных ведущих колес, до остановки транспортного средства.
Эффект от изобретения
[0007] Таким образом, прикладывая начальный крутящий момент с величиной, необходимой для поддержания состояния кручения системы привода до того, как транспортное средство останавливается, при подготовке к началу движения транспортного средства снова, когда транспортное средство остановлено, возможно обеспечить отклик передачи крутящего момента на дополнительные ведущие колеса относительно операции нажатия педали акселератора, когда транспортное средство снова начинает движение из состояния остановки.
Краткое описание рисунков
[0008] Фиг.1 представляет собой общую схему системы, показывающую конфигурацию системы привода и конфигурацию системы управления 4WD в транспортном средстве с приводом на четыре колеса от двигателя, имеющем переднеприводную основу, к которой относится способ управления сцеплением и устройство управления сцеплением согласно первому варианту осуществления;
Фиг.2 - вид в разрезе, показывающий сцепление шариково-кулачкового типа с электронным управлением, обеспеченную для системы с задними ведущими колесами транспортного средства с приводом на четыре колеса от двигателя;
Фиг.3 - вид в перспективе и схематичный вид действия, показывающий кулачковый механизм в сцеплении шариково-кулачкового типа с электронным управлением;
Фиг.4 - блок-схема управления, показывающая конфигурацию автоматического управления 4WD, выполняемого контроллером 4WD, когда в системе управления 4WD первого варианта осуществления выбран «автоматический режим»;
Фиг.5 представляет собой разделенную обзорную диаграмму, показывающую разделенный обзор области управления начальным крутящим моментом, области управления вращением дифференциала и области распределения движущей силы, причем упомянутые области выбираются при автоматическом управлении 4WD, когда в системе управления 4WD первого варианта осуществления выбран «автоматический режим»;
Фиг.6 - диаграмма, представляющая первую карту начального крутящего момента, в которой установлен первый начальный крутящий момент, который должен выводиться из блока обработки начального крутящего момента во время операции выключения акселератора при нахождении в положении D;
Фиг.7 - диаграмма, представляющая вторую карту начального крутящего момента, в которой установлен второй начальный крутящий момент, который должен выводиться из блока обработки начального крутящего момента во время операции выключения акселератора при нахождении в положении R;
Фиг.8 - диаграмма, представляющая третью карту начального крутящего момента, в которой установлен третий начальный крутящий момент, который должен выводиться из блока обработки начального крутящего момента в связи с операцией переключения положения включения передачи (из D в N, а затем в R или из R в N и затем в D) во время операции выключения акселератора;
Фиг.9 - диаграмма, показывающая карту управления вращением дифференциала, в которой установлен крутящий момент сцепления 4WD, который должен выводиться из блока обработки крутящего момента вращения дифференциала во время операции включения акселератора;
Фиг.10 - диаграмма, показывающая карту управления распределением движущей силы, в которой задан крутящий момент сцепления 4WD, который должен выводиться из блока обработки крутящего момента распределения движущей силы во время операции включения акселератора;
Фиг.11 - блок-схема последовательности операций, показывающая последовательность процессов управления начальным крутящим моментом, выполняемых блоком обработки начального крутящего момента контроллера 4WD первого варианта осуществления;
Фиг.12 - диаграмма перехода режима, показывающая действие перехода режима в процессах управления начальным крутящим моментом, выполняемых 4WD-контроллером первого варианта осуществления;
Фиг.13 - временная диаграмма, показывающая различные характеристики, относящиеся к операции переключения передачи водителем, положению акселератора, торможению, скорости транспортного средства, полному крутящему моменту, крутящему моменту команды 4WD и состоянию кулачка сцепления в момент, когда выполняется переход постепенно из положения N к движению после начала движения в положении D и нахождения в положении D, к остановке и к повторному началу движения в сравнительном примере;
Фиг.14 - временная диаграмма, показывающая различные характеристики, относящиеся к операции переключения передачи водителем, положению акселератора, торможению, скорости транспортного средства, полному крутящему моменту, крутящему моменту команды 4WD и состоянию кулачка сцепления в момент, когда выполняется переход постепенно из положения N к движению после начала движения в положении D и нахождения в положении D, к остановке и повторному началу движения в первом варианте осуществления;
Фиг.15 - временная диаграмма, показывающая различные характеристики, относящиеся к операции переключения передачи водителем, сигналу положения включения передачи, скорости транспортного средства и крутящему моменту команды 4WD в момент, когда операция переключения положения включения передачи с D на N и затем на R выполняется во время перехода из состояния движения в состояние остановки в первом варианте осуществления; и
Фиг.16 - временная диаграмма, показывающая различные характеристики, относящиеся к сигналу включателя зажигания и крутящему моменту команды 4WD в то время, когда операция выключения зажигания выполняется в состоянии, в котором прикладывается начальный крутящий момент в первом варианте осуществления.
Предпочтительные варианты осуществления изобретения
[0009] Предпочтительный вариант осуществления для реализации способа и устройства для управления сцеплением транспортного средства с приводом на четыре колеса по настоящему изобретению описан ниже на основе первого варианта осуществления, показанного на чертежах.
Первый вариант осуществления
[0010] Сначала описывается конфигурация. Способ управления сцеплением и устройство управления сцеплением в первом варианте осуществления применяются к транспортному средству с приводом на четыре колеса от двигателя, имеющему переднеприводную основу (упомянутое транспортное средство является одним примером транспортного средства с приводом на четыре колеса). Конфигурация первого варианта осуществления разделена ниже на «конфигурацию всей системы транспортного средства с приводом на четыре колеса от двигателя», «подробную конфигурацию сцепления с электронным управлением», «конфигурацию автоматического управления 4WD», и «конфигурацию процесса управления начальным крутящим моментом».
[0011] [Конфигурация всей системы транспортного средства с приводом на четыре колеса от двигателя]
На фиг.1 показана конфигурация системы привода и конфигурация системы управления 4WD в транспортном средстве с приводом на четыре колеса от двигателя, имеющем переднеприводную основу, к которой применяются способ управления сцеплением и устройство управления сцеплением первого варианта осуществления. Конфигурация всей системы транспортного средства с приводом на четыре колеса от двигателя описана ниже на основе фиг. 1.
[0012] Система привода на передние колеса транспортного средства с приводом на четыре колеса от двигателя снабжена поперечным двигателем 1 (источник привода), автоматической трансмиссией 2, передним дифференциалом 3, валами 4, 5 привода левого и правого передних колес и левым и правым передними колесами 6, 7 (основные ведущие колеса), как показано на фиг. 1.
[0013] Автоматическая трансмиссия 2 снабжена преобразователем 2а крутящего момента, механизмом 2b переключения движения вперед/назад, механизмом 2с бесступенчатой трансмиссии и механизмом 2d конечной передачи.
[0014] Система привода на задние колеса транспортного средства с приводом на четыре колеса от двигателя снабжена раздаточной коробкой 8, карданным валом 9, сцеплением 10 с электронным управлением (фрикционная муфта сцепления), задним дифференциалом 11, валами 12, 13 привода левого и правого задних колес и левым и правым задними колесами 14, 15 (дополнительные ведущие колеса), как показано на фиг. 1.
[0015] Сцепление 10 с электронным управлением представляет собой фрикционную муфту сцепления шариково-кулачкового типа, в котором вырабатывается крутящий момент зацепления сцепления (крутящий момент сцепления 4WD), причем крутящий момент зацепления сцепления соответствует управляющему току соленоида, производимому из крутящего момента команды 4WD, выводимому из контроллера 16 4WD.
[0016] В частности, транспортное средство, имеющее компоновку переднего двигателя, переднего привода (FF), используется в качестве основы, причем транспортное средство, имеющее компоновку FF, является таким, что крутящий момент привода, который проходит через поперечный двигатель 1 и автоматическую трансмиссию 2 передается на левое и правое передние колеса 6, 7, и некоторый крутящий момент привода передается на левое и правое задние колеса 14, 15 через сцепление 10 с электронным управлением. В состоянии, в котором сцепление 10 с электронным управлением выведено из зацепления, отношение (%) распределения крутящего момента между передними и задними колесами в транспортном средстве с приводом на четыре колеса от двигателя является отношением распределения переднего привода в соответствии с распределением передние колеса/задние колеса 100%:0%. В состоянии, в котором сцепление 10 с электронным управлением полностью приведено в зацепление, это отношение представляет собой равное отношение распределения передние колеса/задние колеса в соответствии с распределением передние колеса/задние колеса 50%:50%. Отношение распределения задних колес непрерывно регулируется в диапазоне 0-50% в соответствии с моментом зацепления сцепления 10 с электронным управлением.
[0017] Контроллер 16 4WD, который управляет крутящим моментом зацепления сцепления 10 с электронным управлением, предусмотрен в качестве системы управления 4WD для транспортного средства с приводом на четыре колеса от двигателя, как показано на фиг. 1. Переключатель 17 переключения режима, датчик 18 частоты вращения двигателя, датчик 19 положения акселератора, датчики 20, 21, 22, 23 скорости вращения колеса транспортного средства, включатель 25 зажигания, переключатель 26 блокировки стартера и т. д. подключены к контроллеру 16 4WD. Как и другие типы датчиков (не показаны), датчик угла поворота рулевого колеса, датчик скорости рыскания, датчик положения в пространстве по поперечной оси и датчик положения в пространстве по продольной оси подключены к контроллеру 16 4WD. Состояние поворота транспортного средства определяется на основе входной информации от датчиков, и крутящий момент зацепления сцепления 10 с электронным управлением уменьшается и корректируется в соответствии с состоянием поворота, в результате чего торможение на крутом повороте подавляется.
[0018] Контроллер 16 4WD вычисляет окончательный крутящий момент команды 4WD на основе входной информации от датчика и переключателей и выводит управляющий ток соленоида, который получается путем преобразования окончательного крутящего момента команды 4WD в ток соленоида, в соленоид 24 4WD сцепления 10 с электронным управлением.
[0019] Переключатель 17 переключения режима переключается в любой режим движения из числа «режим 2WD», «заблокированный режим» и «автоматический режим» в соответствии с операцией выбора, выполняемой водителем. Когда выбран «режим 2WD», состояние 2WD привода на передние колеса поддерживается в соответствии с полным расцеплением сцепления 10 с электронным управлением. Когда выбран «заблокированный режим», состояние 4WD, в котором распределение крутящего момента на передние и задние колеса фиксируется на 50:50, поддерживается посредством полного зацепления сцепления 10 с электронным управлением. Когда выбран «автоматический режим», крутящий момент зацепления сцепления 10 с электронным управлением автоматически регулируется в соответствии с состоянием транспортного средства (скорость VSP транспортного средства, положение APO акселератора и т. Д.), и реализуется оптимальное отношение распределения крутящего момента, которое соответствует изменениям в состоянии транспортного средства и состоянии дорожного покрытия.
[0020] Датчик 18 частоты вращения двигателя определяет частоту вращения двигателя для поперечного двигателя 1 и выводит сигнал частоты вращения двигателя на контроллер 16 4WD.
[0021] Датчик 19 положения акселератора обнаруживает величину нажатия акселератора, вызванную действием водителя, в качестве положения APO акселератора и выводит сигнал положения акселератора на контроллер 16 4WD.
[0022] Датчики скорости вращения колеса транспортного средства (датчик 20 скорости вращения левого переднего колеса, датчик 21 скорости вращения правого переднего колеса, датчик 22 скорости вращения левого заднего колеса, датчик 23 скорости вращения правого заднего колеса) соответственно определяют скорости вращения колеса транспортного средства для левого и правого передних колес 6, 7, а также левого и правого задних колес 14, 15 и выводят сигналы скорости вращения колеса транспортного средства на контроллер 16 4WD. Принимается конфигурация, в которой информация о скорости VSP транспортного средства получается в соответствии со средним значением скорости вращения колеса транспортного средства для левого и правого задних колес 14, 15, которые являются дополнительными ведущими колесами.
[0023] Переключатель 26 блокировки стартера обнаруживает положение включения передачи (положение P, положение R, положение N или положение D), выбранное с помощью рычага переключения передач, и выдает сигнал положения включения передачи на контроллер 16 4WD.
[0024] [Подробная конфигурация сцепления с электронным управлением]
На фиг. 2 и 3 показаны сцепление 10 шариково-кулачкового типа с электронным управлением и кулачковый механизм, обеспеченные в системе привода на задние колеса транспортного средства с приводом на четыре колеса от двигателя. Подробная конфигурация сцепления 10 с электронным управлением описана ниже со ссылкой на фиг. 2 и 3.
[0025] Сцепление 10 шариково-кулачкового типа с электронным управлением снабжено входным валом 27 сцепления, выходным валом 28 сцепления и корпусом 29 сцепления, как показано на фиг. 2.
[0026] Один конец входного вала 27 сцепления соединен с карданным валом 9, а другой конец входного вала 27 сцепления прикреплен к корпусу 29 сцепления. Выходной вал 28 сцепления закреплен на входном редукторе заднего дифференциала 11.
[0027] Сцепление 10 шариково-кулачкового типа с электронным управлением имеет управляющую муфту 31 и основную муфту 35 внутри корпуса 29 сцепления. Управляющая муфта 31 представляет собой многодисковую фрикционную муфту, вставленную между корпусом 29 сцепления и кулачком 32 управления. Основная муфта 35 представляет собой многодисковую фрикционную муфту сцепления, вставленную между корпусом 29 сцепления и выходным валом 28 сцепления.
[0028] Кулачковый механизм сцепления 10 шариково-кулачкового типа с электронным управлением выполнен из кулачка 32 управления со стороны управляющей муфты 31, основного кулачка 33 со стороны основной муфты 35 и шариков 34, зажатых между канавками 36, 36 кулачка, образованными в двух кулачках 32, 33.
[0029] Действие для зацепления сцепления 10 шариково-кулачкового типа с электронным управлением описано ниже со ссылкой на фиг. 3. Во-первых, когда ток катушки подается в соленоид 24 4WD с помощью управляющего тока соленоида от контроллера 16 4WD, вокруг соленоида 24 4WD генерируется магнитное поле, и якорь 30 притягивается к управляющей муфте 31. Момент трения генерируется управляющей муфтой 31 после нажатия на нее затянутой на нее якоря 30, и момент трения, генерируемый управляющей муфтой 31, передается на кулачок 32 управления кулачкового механизма, чтобы стать силой F1 соединения в круговом направлении. Сила F1 соединения в круговом направлении, приложенная к кулачку 32 управления, усиливается и преобразуется в прижимающую силу F2 сцепления в осевом направлении через канавки 36, 36 кулачка и шарики 34, а основной кулачок 33 прижимается вперед. Таким образом, благодаря прижимающей силе F2 сцепления от основного кулачка 33, прижимающей и приводящей в зацепление основную муфту 35, крутящий момент сцепления, который пропорционален управляющему току соленоида, вырабатывается в основной муфте 35. Крутящий момент сцепления, вырабатываемый в основной муфте 35, передается на задний дифференциал 11 через выходной вал 28 сцепления.
[0030] [Конфигурация автоматического управления 4WD]
На фиг.4 показана конфигурация автоматического управления 4WD, когда выбран «автоматический режим», предоставленный контроллеру 4 4WD в первом варианте осуществления. На фиг. 5 показан разделенный обзор трех областей управления, когда выбран «автоматический режим». На рисунках 6-10 показаны карты, используемые при автоматическом управлении 4WD. Конфигурация автоматического управления 4WD описана ниже на основе фиг. 4-10.
[0031] Контроллер 16 4WD имеет блок 16a обработки начального крутящего момента, блок 16b обработки крутящего момента вращения дифференциала, блок 16c обработки крутящего момента распределения движущей силы, блок 16d выбора крутящего момента команды 4WD, блок 16e ограничения скорости изменения крутящего момента команды 4WD и блок 16f определения крутящего момента конечной команды 4WD, как показано на фиг. 4.
[0032] Разделенный обзор трех областей управления, когда выбран «автоматический режим», описан на основе фиг. 5. Область управления начальным крутящим моментом, в которой крутящий момент из блока 16а обработки начального крутящего момента выбирается в качестве крутящего момента команды 4WD при автоматическом управлении 4WD, является областью всех скоростей транспортного средства, которая включает в себя состояние остановки, в котором положение APO акселератора равно нулю, как показано на фиг. 5. Область управления вращением дифференциала, в которой крутящий момент из блока 16b обработки крутящего момента вращения дифференциала выбран в качестве крутящего момента команды 4WD в автоматическом управлении 4WD, является областью высокой скорости транспортного средства, в которой положение APO акселератора больше, чем ноль и скорость VSP транспортного средства превышает VSP3 (что составляет, например, приблизительно 85 км/ч), как показано на фиг. 5. Когда крутящий момент из блока 16c обработки крутящего момента распределения движущей силы выбран в качестве крутящего момента команды 4WD при автоматическом управлении 4WD, область распределения движущей силы находится в области низкой скорости транспортного средства, в которой положение APO акселератора больше нуля и скорость VSP транспортного средства меньше, чем VSP1 (например, приблизительно 25 км/ч). В случае области промежуточной скорости транспортного средства, в которой положение APO акселератора больше нуля, и скорость VSP транспортного средства удовлетворяет соотношению VSP1 ≤ VSP ≤ VSP3, высокий крутящий момент из числа крутящего момента от блока 16b обработки крутящего момента вращения дифференциала и крутящего момента от блока 16c обработки крутящего момента распределения движущей силы выбирается в качестве крутящего момента команды 4WD. В случае области промежуточной скорости транспортного средства, в которой скорость VSP транспортного средства удовлетворяет соотношению VSP1 ≤ VSP ≤ VSP3, область распределения движущей силы уменьшается в размере, а область управления вращением дифференциала увеличивается в размере по мере увеличения скорости VSP транспортного средства.
[0033] Блок 16a обработки начального крутящего момента назначает очень низкий крутящий момент, то есть приблизительно несколько Нм, в качестве начального крутящего момента, когда скорость VSP транспортного средства во время операции выключения акселератора превышает заданную скорость VSP0 транспортного средства (например, приблизительно 20 км/ч). Когда скорость VSP транспортного средства во время операции выключения акселератора равна или меньше заданной скорости VSP0 транспортного средства, любой из первого начального крутящего момента Tr1, второго начального крутящего момента Tr2 и третьего начального крутящего момента Tr3 задается в соответствии с положением включения передачи. Определенный таким образом начальный крутящий момент выводится в блок 16d выбора крутящего момента команды 4WD.
[0034] Величина первого начального крутящего момента Tr1, когда скорость VSP транспортного средства равна или меньше заданной скорости VSP0 транспортного средства в положении D, установлена на величину, которая необходима для поддержания состояния кручения кулачкового механизма посредством крутящего момента, передается в систему привода дополнительных ведущих колес до остановки транспортного средства, как показано на первой карте Mp1 начального крутящего момента на фиг. 6. Более конкретно, в случаях, когда крутящий момент проскальзывания, когда транспортное средство остановлено в положении D, распределяется на основные ведущие колеса и дополнительные ведущие колеса, вышеупомянутая величина устанавливается на величину (например, величина, где Tr1 = приблизительно 180Нм) крутящего момента, которая необходима для установки отношения распределения крутящего момента на левое и правое передние колеса 6, 7, которые являются основными ведущими колесами, и распределения крутящего момента на левое и правое задние колеса 14, 15, которые являются дополнительными ведущими колесами, на 50%:50%.
[0035] Крутящий момент проскальзывания, когда транспортное средство остановлено в положении D, можно рассчитать, используя: частоту Ne вращения двигателя (частоту вращения на холостом ходу) поперечного двигателя 1; характеристики преобразователя 2а крутящего момента; и общее передаточное отношение, достигаемое механизмом 2b переключения вперед/назад, механизмом 2с бесступенчатой трансмиссии и механизмом 2d окончательного уменьшения. В частности, когда коэффициент τ несущей способности по крутящему моменту и коэффициент t крутящего момента преобразователя 2а крутящего момента известны, крутящий момент проскальзывания может быть рассчитан с использованием следующих формул.
Выходной крутящий момент преобразователя крутящего момента = t × τ × Ne2
Крутящий момент проскальзывания при остановленном транспортном средстве = выходной крутящий момент преобразователя крутящего момента × общее передаточное отношение
Соответственно, величина первого начального крутящего момента Tr1, когда скорость VSP транспортного средства равна или меньше, чем заданная скорость VSP0 транспортного средства в положении D, устанавливается равной половине величины крутящего момента проскальзывания, когда транспортное средство остановлено, как было получено вышеупомянутым расчетом. Может быть принята конфигурация, в которой величина крутящего момента проскальзывания, когда транспортное средство остановлено, получается экспериментальным путем, а не расчетным путем.
[0036] Величина второго начального крутящего момента Tr2 (который меньше, чем Tr1), когда скорость VSP транспортного средства равна или меньше, чем заданная скорость VSP0 транспортного средства в положении R, установлена на величину, которая необходима для поддержания состояния кручения кулачкового механизма крутящим моментом, передаваемым в систему привода дополнительных ведущих колес до остановки транспортного средства, как показано второй картой Mp2 начального крутящего момента на фиг. 7. Более конкретно, в случаях, когда крутящий момент проскальзывания, когда транспортное средство остановлено в положении R, распределяется на основные ведущие колеса и дополнительные ведущие колеса, вышеупомянутая величина устанавливается на величину крутящего момента, которая необходима для установки отношения распределения крутящего момента на левое и правое передние колеса 6, 7, которые являются основными ведущими колесами, и распределение крутящего момента на левое и правое задние колеса 14, 15, которые являются дополнительными ведущими колесами, на 50%:50%.
[0037] Крутящий момент проскальзывания, когда транспортное средство остановлено в положении R, можно рассчитать таким же образом, как и в положении D, используя частоту Ne вращения двигателя (частота вращения на холостом ходу) поперечного двигателя 1, характеристики преобразователя 2а крутящего момента, и общее передаточное отношение.
[0038] Величина третьего начального крутящего момента Tr3, когда скорость VSP транспортного средства равна или меньше заданной скорости VSP0 транспортного средства, третий начальный крутящий момент Tr3 сопровождает операцию переключения положения включения передачи (с D на N, а затем на R или с R на N, а затем на D), устанавливается так, что Tr3=0 (нулевой крутящий момент), как показано на третьей карте Mp3 начального крутящего момента на фиг. 8.
[0039] Когда вращение ΔN переднего/заднего дифференциала происходит во время движения из-за операции включения акселератора, блок 16b обработки крутящего момента вращения дифференциала устанавливает крутящий момент сцепления 4WD, который соответствует вращению ΔN переднего/заднего дифференциала. Определенный таким образом крутящий момент сцепления WD выводится в блок 16d выбора крутящего момента команды 4WD.
[0040] Крутящий момент сцепления 4WD, определенный в соответствии с вращением ΔN переднего/заднего дифференциала, имеет такую величину, чтобы увеличиваться пропорционально с увеличением вращения ΔN переднего/заднего дифференциала, как показано на карте управления вращением дифференциала на фиг. 9. В частности, когда вращение ΔN переднего/заднего дифференциала происходит вследствие проскальзывания привода во время движения, распределение крутящего момента на левое и правое задние колеса 14, 15 увеличивается, в результате чего распределение крутящего момента на левое и правое передние колеса 6, 7 уменьшается так что результирующий крутящий момент может подавить проскальзывание привода. Вращение ΔN переднего/заднего дифференциала рассчитывается по разности скоростей вращения колес транспортного средства, полученной путем вычитания средней скорости вращения колес транспортного средства скоростей VRL, VRL вращения левого и правого задних колес из средней скорости вращения колес транспортного средства скоростей VFL, VFR вращения левого и правого передних колес.
[0041] Блок 16c обработки крутящего момента распределения движущей силы устанавливает крутящий момент сцепления 4WD в соответствии со скоростью VSP транспортного средства, чтобы улучшать характеристику начала движения транспортного средства в области низкой скорости транспортного средства (область начала движения) из-за операции включения акселератора. Определенный таким образом крутящий момент сцепления 4WD выводится в блок 16d выбора крутящего момента команды 4WD.
[0042] Крутящий момент сцепления 4WD, определенный в соответствии со скоростью VSP транспортного средства, применяется с величиной, которая влияет на состояние 4WD, в котором отношение распределения крутящего момента на передние и задние колеса составляет, по существу, 50%:50% в области, в которой скорость VSP транспортного средства равна или меньше VSP1, как показано на карте управления распределением движущей силы на фиг. 10. Это обеспечивает стабильное начало движения даже при движении транспортного средства по скользкому дорожному покрытию. В диапазоне, в котором скорость VSP транспортного средства превышает VSP1, отношение распределения крутящего момента на передние и задние колеса уменьшается до отношения, близкого к состоянию 2WD, как показано на карте управления распределением движущей силы на фиг. 10, тем самым способствуя улучшению экономии топлива.
[0043] Блок 16d выбора крутящего момента команды 4WD выбирает крутящий момент команды 4WD путем выбора высокого крутящего момента, выводимого из блока 16a обработки начального крутящего момента, блока 16b обработки крутящего момента вращения дифференциала и блока 16c обработки крутящего момента распределения движущей силы. Когда положение APO акселератора равно нулю, нулевой крутящий момент выводится из блока 16b обработки крутящего момента вращения дифференциала и блока 16c обработки крутящего момента распределения движущей силы, посредством чего один из начальных крутящих моментов Tr1, Tr2, Tr3 из блока 16а обработки начального крутящего момента выбирается как крутящий момент команды 4WD. Однако, когда положение APO акселератора больше нуля, нулевой крутящий момент выводится из блока 16а обработки начального крутящего момента, в результате чего высокий крутящий момент из числа крутящего момента, выводимого из блока 16b обработки крутящего момента вращения дифференциала, и крутящего момента, выводимого из блока 16с обработки крутящего момента распределения движущей силы выбирается в качестве крутящего момента команды 4WD.
[0044] Блок 16e ограничения скорости изменения крутящего момента команды 4WD переключает крутящий момент, выбранный блоком 16d выбора крутящего момента команды 4WD, таким образом применяя ограничение к скорости изменения крутящего момента от ранее выбранного крутящего момента до текущего выбранного крутящего момента, когда существует зазор между ранее выбранным крутящим моментом и текущим выбранным крутящим моментом. Здесь блок 16e ограничения скорости изменения крутящего момента команды 4WD имеет первую скорость изменения крутящего момента, при которой градиент изменения крутящего момента является резким, вторую скорость изменения крутящего момента, при которой градиент изменения крутящего момента более плавный, чем при первой скорости изменения крутящего момента, и третья скорость изменения крутящего момента, при которой градиент изменения крутящего момента более плавный, чем при второй скорости изменения крутящего момента. Когда начальный крутящий момент снижается до нулевого крутящего момента посредством операции переключения положения включения передачи в положении APO акселератора, равном нулю, выбирается первая скорость изменения крутящего момента, которая делает упор на отклик. Во время уменьшения крутящего момента сцепления 4WD до начального крутящего момента или во время увеличения от начального крутящего момента до крутящего момента сцепления 4WD выбирается вторая скорость изменения крутящего момента, которая уравновешивает как улучшение отклика, так и предотвращение дискомфорта. Когда включатель 25 зажигания выключен, выбирается третья скорость изменения крутящего момента, которая делает упор на предотвращение дискомфорта.
[0045] Блок 16f определения крутящего момента конечной команды 4WD определяет в качестве конечного крутящего момента команды 4WD крутящий момент команды 4WD, до которого применялся предел скорости изменения крутящего момента, выведенный из блока 16е ограничения скорости изменения крутящего момента команды 4WD. Когда конечный крутящий момент команды 4WD определяется с помощью блока 16f определения крутящего момента команды 4WD, определенный крутящий момент команды 4WD преобразуется в управляющий ток соленоида. Преобразованный управляющий ток соленоида выводится из контроллера 16 4WD на соленоид 24 4WD сцепления 10 с электронным управлением.
[0046] [Конфигурация процесса управления начальным крутящим моментом]
На фиг.11 показана последовательность процессов управления начальным крутящим моментом, выполняемых блоком 16а обработки начального крутящего момента контроллера 16 4WD. Этапы на фиг. 11, которая показывает конфигурацию процесса управления начальным крутящим моментом, описана ниже. Процесс в этой блок-схеме последовательности операций запускается, когда выбирается положение включения передачи «движение» (положение D или положение R), то есть когда положение APO акселератора равно нулю. Процесс заканчивается, когда положение акселератора APO больше нуля.
[0047] На этапе S1 определяется, находится ли включатель 25 зажигания во включенном состоянии. Процесс переходит к этапу S2, когда результатом является ДА (IGN OFF), но переходит к этапу S12, когда результатом является НЕТ (IGN OFF).
[0048] На этапе S2, следуя определению «IGN ON» (зажигание включено) на этапе S1, определяется, выбрана или нет позиция «D». Процесс переходит к этапу S3, когда результатом является ДА (выбрана позиция D), но переходит к этапу S6, когда результатом является НЕТ (выбрано положение R). Определение того, является ли выбранное положение включения передачи «положением D» или «положением R», выполняется в соответствии с сигналом переключения от переключателя 26 блокировки стартера.
[0049] На этапе S3, после определения, что положение D выбрано на этапе S2, первый начальный крутящий момент Tr1 задается в соответствии с первой картой Mp1 начального крутящего момента на фиг. 6 и скорости транспортного средства VSP в это время. Затем процесс переходит к этапу S4. Когда скорость VSP транспортного средства в положении D равна или меньше заданной скорости VSP0 транспортного средства, значение крутящего момента, имеющее величину, равную половине значения крутящего момента проскальзывания, когда транспортное средство остановлено, устанавливается в качестве первого начального крутящего момента Tr1.
[0050] На этапе S4, после установки первого начального крутящего момента Tr1 на этапе S3, крутящий момент команды 4WD (управляющий ток соленоида) для получения установленного первого начального крутящего момента Tr1 выводится на соленоид 24 4WD сцепления 10 с электронным управлением. Затем процесс переходит к этапу S5.
[0051] На этапе S5, после вывода крутящего момента команды 4WD для получения Tr1 на этапе S4, определяется, было ли положение включения передачи переключено из положения D в положение N, а затем в положение R. Процесс переходит к этапу S9, когда результатом является ДА (есть операция переключения с D на N, а затем на R), но переходит к этапу S1, когда результатом является НЕТ (нет операции переключения с D на N, а затем на R). Определение, была ли или нет «операция переключения с D на N, а затем на R», выполняется в соответствии с сигналом переключения от переключателя 26 блокировки стартера.
[0052] На этапе S6, после определения, что положение R выбрано на этапе S2, второй начальный крутящий момент Tr2 устанавливается в соответствии со второй картой Mp2 начального крутящего момента на фиг. 7 и скоростью транспортного средства VSP в это время. Затем процесс переходит к этапу S7. Когда скорость VSP транспортного средства в положении R равна или меньше заданной скорости VSP0 транспортного средства, значение крутящего момента, имеющее величину, равную половине величины крутящего момента проскальзывания, когда транспортное средство остановлено, устанавливается в качестве второго начального крутящего момента Tr2.
[0053] На этапе S7, после установки второго начального крутящего момента Tr2 на этапе S6, крутящий момент команды 4WD (управляющий ток соленоида) для получения установленного второго начального крутящего момента Tr2 выводится на соленоид 24 4WD сцепления 10 с электронным управлением. Затем процесс переходит к этапу S8.
[0054] На этапе S8, после вывода крутящего момента команды 4WD для получения Tr2 на этапе S7, определяется, было ли положение включения передачи переключено из положения R в положение N, а затем в положение D. Процесс переходит к этапу S9, когда результатом является ДА (была операция переключения с R на N, а затем на D), но переходит к этапу S1, когда результатом является НЕТ (нет операции переключения с R на N, а затем на D). Определение, была ли или нет «операция переключения с R на N, а затем на D», выполняется в соответствии с сигналом переключения от переключателя 26 блокировки стартера.
[0055] На этапе S9, после определения, что была операция переключения с D на N, а затем на R на этапе S5, или определения, что была операция переключения с R на N, а затем на D на этапе S8 третий начальный крутящий момент Tr3 устанавливается согласно третьей карте Mp3 начального крутящего момента на фиг. 8 и скорости транспортного средства VSP в это время. Затем процесс переходит к этапу S10. Когда скорость VSP транспортного средства в случае, когда происходит операция переключения положения включения передачи, равна или меньше заданной скорости VSP0 транспортного средства, третий начальный крутящий момент Tr3 устанавливается так, что Tr3=0.
[0056] На этапе S10, после установки третьего начального крутящего момента Tr3 на этапе S9, крутящий момент команды 4WD (управляющий ток соленоида) для получения установленного третьего начального крутящего момента Tr3 выводится на соленоид 24 4WD сцепления 10 с электронным управлением. Процесс затем переходит на этап S11.
[0057] На этапе S11, после уменьшения крутящего момента команды 4WD в соответствии с резким градиентом изменения на этапе S10, определяется, достиг ли или нет нуля крутящий момент команды 4WD. Процесс заканчивается, когда результатом является ДА (достигнут крутящий момент команды 4WD 0), но переходит к этапу S10, когда результатом является НЕТ (крутящий момент команды 4WD 0 еще не достигнут).
[0058] На этапе S12, после определения «IGN OFF» (зажигание выключено) на этапе S1 или определения, что крутящий момент команды 4WD 0 еще не достигнут на этапе S13, крутящий момент команды 4WD (управляющий ток соленоида) для постепенного уменьшения крутящего момента команды 4WD, выводимого в это время до нулевого крутящего момента команды 4WD, выводится на соленоид 24 4WD сцепления 10 с электронным управлением. Затем процесс переходит к этапу S13.
[0059] На этапе S13, после уменьшения крутящего момента команды 4WD в соответствии с градиентом с плавным изменением на этапе S12, определяется, достиг ли или нет нуля крутящий момент команды 4WD. Процесс заканчивается, когда результатом является ДА (достигнут крутящий момент команды 4WD 0), но переходит к этапу S12, когда результатом является НЕТ (крутящий момент команды 4WD 0 еще не достигнут).
[0060] Далее описано действие настоящего изобретения. Описание действия по первому варианту осуществления делится на «действие процесса управления начальным крутящим моментом», «действие управления сцеплением в сценарии, в котором транспортное средство снова начинает движение», «действие установки начального крутящего момента», «действие управление сцеплением в сценарии, в котором переключается положение включения передачи и транспортное средство остановлено» и «действие управления сцеплением в сценарии, в котором зажигание выключено и транспортное средство остановлено».
[0061] [Действие процесса управления начальным крутящим моментом]
Действие процесса управления начальным крутящим моментом, которое выполняется блоком 16a обработки начального крутящего момента контроллера 16 4WD, когда выбран «автоматический режим» и во время операции по отпусканию акселератора, описано на основе блок-схемы последовательности операций на фиг. 11.
[0062] Во время снижения скорости от состояния движения вперед до состояния остановки, когда поддерживается выбор положения D, или во время, когда транспортное средство остановлено, последовательность операций в блок-схеме последовательности операций на фиг. 11 последовательно повторяется в последовательности от этапа S1 через этап S2, этап S3 и этап S4 до этапа S5. На этапе S3 первый начальный крутящий момент Tr1 устанавливается в соответствии с первой картой Mp1 начального крутящего момента на фиг. 6 и скоростью транспортного средства VSP в это время. На следующем этапе S4 выводится крутящий момент команды 4WD для получения установленного первого начального крутящего момента Tr1. В частности, во время снижения скорости, при нахождении в положении D, в котором скорость VSP транспортного средства равна или меньше заданной скорости VSP0 транспортного средства, или во время, когда транспортное средство остановлено в положении D, выполняется управление для применения значения крутящего момента (то есть первого начального крутящего момента Tr1), имеющего величину, равную половине величины крутящего момента проскальзывания, когда транспортное средство остановлено в положении D.
[0063] Во время снижения скорости от состояния движения назад к состоянию остановки, когда поддерживается выбор позиции R, или во время, когда транспортное средство остановлено, последовательность операций в блок-схеме последовательности операций на фиг. 11 последовательно повторяется в последовательности от этапа S1 через этап S2, этап S6 и этап S7 до этапа S8. На этапе S6 второй начальный крутящий момент Tr2 устанавливается в соответствии со второй картой Mp2 начального крутящего момента на фиг. 7 и скоростью транспортного средства VSP в это время. На следующем этапе S7 выводится крутящий момент команды 4WD для получения установленного второго начального крутящего момента Tr2. В частности, во время снижения скорости в положении R, в котором скорость VSP транспортного средства равна или меньше заданной скорости VSP0 транспортного средства, или во время, когда транспортное средство остановлено в положении R, выполняется управление для применения значения крутящего момента (то есть второго начального крутящего момента Tr2), имеющего величину, равную половине величины крутящего момента проскальзывания, когда транспортное средство остановлено в положении R.
[0064] Когда положение включения передачи переключается с понижения скорости в положении D или с остановки в положении D через положение N в положение R, последовательность операций в блок-схеме последовательности операций на фиг. 11 переходит от этапа S5 через последовательность от этапа S9 по этап S10 до этапа S11. Когда на этапе S11 определено, что нулевой крутящий момент команды 4WD еще не достигнут, последовательность операций многократно переходит в последовательности от этапа S10 к этапу S11, но после определения на этапе S11, что нулевой крутящий момент команды 4WD достигнут, последовательность операций завершается после этапа S11. На этапе S9 третий начальный крутящий момент Tr3 устанавливается в соответствии с третьей картой Mp3 начального крутящего момента на фиг. 8 и скоростью транспортного средства VSP в это время. Затем последовательность операций переходит к этапу S10. На следующем этапе S10 выводится крутящий момент команды 4WD для получения установленного третьего начального крутящего момента Tr3. В частности, когда выполняется операция переключения положения с D на N, а затем на R, в то время как скорость VSP транспортного средства равна или меньше заданной скорости VSP0 транспортного средства, выполняется управление для резкого уменьшения начального крутящего момента, который был до этого, до нулевого крутящего момента.
[0065] Когда положение включения передачи переключается с понижения скорости в положении R или с остановки в положении R через положение N в положение D, последовательность операций в блок-схеме последовательности операций на фиг. 11 переходит от этапа S8 через последовательность с этапа S9 по этап S10 на этап S11. Когда на этапе S11 определено, что нулевой крутящий момент команды 4WD еще не достигнут, последовательность операций многократно переходит в последовательности от этапа S10 к этапу S11, но после определения на этапе S11, что нулевой крутящий момент команды 4WD достигнут, последовательность операций завершается после этапа S11. В частности, когда операция переключения положения с R на N, а затем на D выполняется, в то время как скорость VSP транспортного средства равна или меньше заданной скорости VSP0 транспортного средства, аналогично тому, когда выполняется операция переключения положения с D на N, а затем на R, выполняется управление для резкого уменьшения начального крутящего момента, который был до этого, до нулевого крутящего момента.
[0066] Когда включатель 25 зажигания выключен, когда транспортное средство остановлено в положении D или, когда транспортное средство остановлено в положении R, последовательность операций в блок-схеме последовательности операций на фиг. 11 переходит от этапа S1 через последовательность от этапа S12 до этапа S13. Когда на этапе S13 определено, что нулевой крутящий момент команды 4WD еще не достигнут, последовательность операций многократно переходит в последовательности от этапа S12 к этапу S13, но после определения на этапе S13, что нулевой крутящий момент команды 4WD достигнут, последовательность операций заканчивается после этапа S13. В частности, когда была выполнена операция выключения зажигания, выполняется управление для постепенного уменьшения крутящего момента команды 4WD, который был выведен до крутящего момента команды 4WD, равного нулю.
[0067] Действие перехода в режим управления в соответствии с действием процесса управления начальным крутящим моментом, выполняемым блоком 16а обработки начального крутящего момента таким образом, описано на основе фиг. 12.
[0068] Во-первых, когда APO изменяется с того, что он больше нуля, до того, что он становится равным нулю, когда выбрана позиция D, выполняется переход из режима управления для применения начального крутящего момента с использованием третьей карты Mp3 начального крутящего момента к режиму управления для применение начального крутящего момента с использованием первой карты начального крутящего момента Mp1, как показано на фиг. 12. Во время снижения скорости в положении D и когда APO равен нулю, или во время, когда транспортное средство остановлено в положении D, поддерживается режим управления для применения начального крутящего момента с использованием первой карты Mp1 начального крутящего момента, как показано на фиг. 12. Однако, когда операция переключения положения с D на N, а затем на R выполняется, когда APO равен нулю, выполняется переход из режима управления для применения начального крутящего момента с использованием первой карты Mp1 начального крутящего момента в режим управления для применения начального крутящего момента с использованием третьей карты Mp3 начального крутящего момента, как показано на фиг. 12.
[0069] Когда APO переключается с того, что оно больше нуля, до того, что он становится равным нулю, когда выбрана позиция R, осуществляется переход из режима управления для применения начального крутящего момента с использованием третьей карты Mp3 начального крутящего момента к режиму управления для применения начального крутящего момента с использованием второй карты Mp2 начального крутящего момента, как показано на фиг. 12. Во время снижения скорости в положении R и когда APO равен нулю, или во время, когда транспортное средство остановлено в положении R, поддерживается режим управления для применения начального крутящего момента с использованием второй карты Mp2 начального крутящего момента, как показано на фиг. 12. Однако, когда операция переключения положения с R на N, а затем на D выполняется, когда APO равен нулю, выполняется переход из режима управления для применения начального крутящего момента с использованием второй карты Mp2 начального крутящего момента в режим управления для применения начального крутящего момента с использованием третьей карты Mp3 начального крутящего момента, как показано на фиг. 12.
[0070] [Действие управления сцеплением в сценарии, в котором транспортное средство снова начинает движение]
Фиг. 13 - временная диаграмма, показывающая различные характеристики в сценарии, в котором переход постепенно выполняется из положения N в движение после начала движения в положении D и нахождении в положении D и до остановки и повторного начала движения в сравнительном примере, в котором нулевой крутящий момент применяется в качестве начального крутящего момента в момент, когда транспортное средство остановлено. Действие управления сцеплением в сценарии, в котором транспортное средство снова начинает движение в сравнительном примере, описано ниже на основе фиг. 13.
[0071] Когда транспортное средство остановлено в положении N, выполняется переход из положения N в положение D в момент времени t1, и операция нажатия педали акселератора выполняется в момент времени t2. Выполнение операции включения акселератора в момент времени t2 запускает управление для приложения крутящего момента команды 4WD в соответствии с картой распределения движущей силы, показанной на фиг. 10, заставляет кулачковый механизм сцепления с электронным управлением переходить в состояние кручения кулачка в момент времени t3 и начинает вырабатывать осевую прижимающую силу сцепления. Соответственно, транспортное средство начинает движение сразу после момента t2, задний крутящий момент передается на левое и правое задние колеса, начиная с момента t3, и скорость транспортного средства увеличивается из-за высокой характеристики начала движения в режиме 4WD.
[0072] Когда операция выключения акселератора выполняется в момент времени t4, когда транспортное средство движется в положении D, крутящий момент команды 4WD, который был применен до этого, начинает уменьшаться до нуля. Кроме того, когда операция включения акселератора выполняется в соответствии с изменением нажатия, предназначенным для остановки транспортного средства в момент времени t5, крутящий момент команды 4WD продолжает уменьшаться. Это уменьшение крутящего момента команды 4WD заставляет кулачковый механизм сцепления с электронным управлением переходить из состояния кручения кулачка в свободное состояние кулачка в момент времени t6. Соответственно, осевая прижимающая сила сцепления устраняется, и состояние 2WD вступает в силу, начиная с момента времени t6, и транспортное средство останавливается в момент времени t7.
[0073] Когда операция отключения тормоза выполняется в момент времени t8, а операция включения акселератора выполняется в момент времени t9 в соответствии с изменением нажатия, предназначенным для того, чтобы заставить транспортное средство снова начать движение, когда транспортное средство находится в состоянии остановки в положении D, крутящий момент команды 4WD начинает увеличиваться, чтобы заставить крутящий момент команды 4WD немедленно переключаться с нулевого крутящего момента на распределение привода на четыре колеса. Это увеличение крутящего момента команды 4WD заставляет кулачковый механизм сцепления с электронным управлением переходить из свободного состояния кулачка в состояние кручения кулачка в момент времени t10. Однако в передних колесах происходит проскальзывание привода, и отклик передачи крутящего момента к задним колесам снижается.
[0074] В частности, в то время как транспортное средство остановлено до момента t9, кулачковый механизм сцепления с электронным управлением находится в свободном состоянии кулачка (состояние 2WD), и крутящий момент двигателя, основанный на операции включения акселератора, передается только на передние колеса, даже когда операция включения акселератора выполняется в момент времени t9. Поэтому проскальзывание привода происходит, когда шина переднего колеса превышает границу сцепления с поверхностью дороги из-за, например, резкой операции включения акселератора или операции включения акселератора, выполняемой на дороге с низким μ. Когда в передних колесах происходит проскальзывание привода, диск, соединенный с передними колесами из числа дисков сцепления основной муфты в сцеплении с электронным управлением, вращается в соответствии с вращением проскальзывания привода и входит в состояние проскальзывания сцепления вращения относительно диска, соединенного с задними колесами, которые по существу остановлены, из числа дисков сцепления.
[0075] Поэтому, даже когда крутящий момент команды 4WD выводится на основе операции нажатия педали акселератора, предназначенной для того, чтобы заставить транспортное средство снова начать движение, предписанный период времени истекает в состоянии, в котором крутящий момент зацепления (фактический задний крутящий момент) в сцеплении с электронным управлением остается низким, как указано характеристикой на штрихпунктирной линии в окруженной области, показанной стрелкой A на фиг. 13. Таким образом, требуется некоторый период времени для перехода сцепления с электронным управлением из свободного состояния кулачка в состояние кручения кулачка, задерживая увеличение фактического заднего крутящего момента относительно крутящего момента команды 4WD в сцеплении с электронным управлением и уменьшая отклик передачи крутящего момента на задние колеса.
[0076] В результате, градиент увеличения скорости транспортного средства уменьшается в момент времени t9 и далее, когда транспортное средство снова начинает движение, как указано характеристикой скорости транспортного средства в окруженной области, показанной стрелкой B на фиг. 13, и отклик повторного начала движения уменьшается. Чтобы подавить проскальзывание привода на передних колесах, операция акселератора, выполняемая водителем при повторном начале движения, должна быть операцией мягкого нажатия на педаль акселератора.
[0077] Фигура 14 представляет собой временную диаграмму, показывающую различные характеристики в сценарии, в котором постепенно осуществляется переход из положения N в движение после начала движения в положении D и нахождении в положении D, в остановку и в начало движения снова в первом варианте. Действие управления сцеплением в сценарии, в котором транспортное средство снова начинает движение в первом варианте осуществления, описано ниже со ссылкой на фиг. 14. Этот сценарий такой же, как и в сравнительном примере до времени t3, и поэтому описание этой части сценария опущено.
[0078] Когда операция выключения акселератора выполняется в момент времени t4, когда транспортное средство движется в положении D, крутящий момент команды 4WD, который был применен до этого, затем начинает уменьшаться до первого начального крутящего момента Tr1. Кроме того, когда операция включения тормоза выполняется в момент времени t5 в соответствии с изменением нажатия, предназначенным для остановки транспортного средства, крутящий момент команды 4WD уменьшается до первого начального крутящего момента Tr1 в момент времени t6. Соответственно, кулачковый механизм сцепления 10 с электронным управлением остается в состоянии кручения кулачка даже во время t6 и далее, и создается прижимающая сила F2 сцепления для прижима и вхождения в зацепление основной муфты 35 в осевом направлении. Таким образом, транспортное средство останавливается в момент t7, тогда как поддерживается состояние 4WD. В частности, в то время как транспортное средство остановлено в момент времени t7 и далее, транспортное средство остается готовым к операции, чтобы снова начать движение в состоянии 4WD, в котором крутящий момент проскальзывания при остановленном транспортном средстве равномерно распределяется на левое и правое передние колеса 6, 7 и левое и правое задние колеса 14, 15.
[0079] Когда операция отключения тормоза выполняется в момент t8, а операция включения акселератора выполняется в момент t9 в соответствии с изменением нажатия, предназначенным для того, чтобы заставить транспортное средство снова начать движение, когда транспортное средство находится в состоянии остановки 4WD в положении D, крутящий момент команды 4WD начинает увеличиваться, чтобы заставить крутящий момент команды 4WD немедленно переключиться с первого начального крутящего момента Tr1 на жесткий 4WD. Таким образом, поскольку кулачковый механизм сцепления 10 с электронным управлением остается в состоянии кручения кулачка, даже когда крутящий момент команды 4WD увеличивается, предотвращается проскальзывание привода на левом и правом передних колесах 6, 7 и отклик передачи крутящего момента на левое и правое задние колеса 14, 15 улучшается.
[0080] В частности, в то время как транспортное средство остановлено до момента t9, кулачковый механизм сцепления 10 с электронным управлением не находится в свободном состоянии кулачка, а находится в состоянии кручения кулачка (состояние 4WD). Поэтому, когда крутящий момент команды 4WD увеличивается на основе операции включения акселератора в момент времени t9, основная муфта 35 в ответ на это входит в зацепление из-за прижимающей силы F2 сцепления без необходимости переключения сцепления 10 с электронным управлением из свободного состояния кулачка в состояние кручения кулачка. В частности, даже когда крутящий момент двигателя увеличивается из-за операции включения акселератора, выполняемой в момент времени t9, крутящий момент двигателя распределяется на левое и правое передние колеса 6, 7 и левое и правое задние колеса 14, 15, и проскальзывание привода на левом и правом передних колесах 6, 7 подавлено.
[0081] Следовательно, когда крутящий момент команды 4WD выводится на основе операции нажатия педали акселератора, предназначенной для того, чтобы заставить транспортное средство снова начать движение, крутящий момент зацепления (фактический задний крутящий момент) в сцеплении 10 с электронным управлением увеличивается в ответ на это, как указано посредством характеристики на штрихпунктирной линии в окруженной области, показанной стрелкой C на фиг. 14. Таким образом, фактический задний крутящий момент увеличивается в ответ на это относительно крутящего момента команды 4WD в сцеплении 10 с электронным управлением, в результате чего улучшается отклик передачи крутящего момента на левое и правое задние колеса 14, 15. Стрелка D на фиг. 14 показывает степень увеличения отклика передачи крутящего момента для характеристики фактического заднего крутящего момента (характеристики на штрихпунктирной линии) в первом варианте осуществления относительно фактической характеристики заднего крутящего момента (характеристики на пунктирной линии) в сравнительном пример.
[0082] В результате, градиент увеличения скорости транспортного средства увеличивается в момент времени t9 и далее, когда транспортное средство снова начинает движение в соответствии с операцией нажатия педали акселератора, как указано характеристикой скорости транспортного средства (характеристика на сплошной линии) в окруженной области, показанной стрелкой E на фиг. 14, что приводит к улучшению отклика в начале движения снова. Стрелка F на фиг. 14 показывает степень увеличения отклика в начале движения снова для характеристики скорости транспортного средства (характеристика по сплошной линии) в первом варианте осуществления относительно характеристики скорости транспортного средства (характеристика по пунктирной линии) в сравнительном примере. Преимущество [этой конфигурации] с точки зрения задействования акселератора водителем состоит в том, что [водитель не обязан выполнять] операцию плавного нажатия педали акселератора при начале движения снова.
[0083] [Действие установки начального крутящего момента]
Ниже описаны действие для установки величины первого начального крутящего момента Tr1, когда скорость VSP транспортного средства в положении D равна или меньше заданной скорости VSP0 транспортного средства, и действие для установки величины второго начального крутящего момента Tr2, когда скорость VSP транспортного средства в положении R равна или меньше заданной скорости VSP0 транспортного средства.
[0084] Схема для установки величины первого начального крутящего момента Tr1 и второго начального крутящего момента Tr2 согласно крутящему моменту команды 4WD разделена на следующие три схемы.
(a) Крутящий момент команды 4WD установлен на величину, необходимую для поддержания состояния кручения кулачкового механизма (состояние кручения системы привода дополнительных ведущих колес) посредством крутящего момента, передаваемого в систему привода дополнительных ведущих колес до остановки транспортного средства.
(b) В тех случаях, когда крутящий момент проскальзывания, когда транспортное средство остановлено, распределяется на основные ведущие колеса и дополнительные ведущие колеса, крутящий момент команды 4WD устанавливается на величину, которая необходима для установки отношения распределения крутящего момента к левое и правое передние колеса 6, 7, которые являются основными ведущими колесами, и распределения крутящего момента на левое и правое задние колеса 14, 15, которые являются дополнительными ведущими колесами, на 50%:50%.
(c) Нижнее предельное значение крутящего момента команды 4WD установлено на величину, которая необходима для распределения 50% крутящего момента проскальзывания, когда транспортное средство остановлено, а верхнее предельное значение крутящего момента команды 4WD установлено на величину, которая необходима для избежания блокировки тормоза четырех колес.
[0085] Схема в (а) состоит в том, чтобы достичь крутящего момента команды 4WD, с которым возможно достичь действия управления сцеплением в сценарии, в котором транспортное средство снова начинает движение на фиг. 14. В частности, когда переход крутящего момента команды 4WD осуществляется постепенно от движения после того, как он оставался в положении D, к остановке и затем к началу движения снова, предпочтительно, чтобы сцепление 10 с электронным управлением могло поддерживать состояние кручения кулачка, даже когда транспортное средство остановлено. Поэтому при условии, что сцепление 10 с электронным управлением может поддерживать состояние кручения кулачка, даже когда транспортное средство остановлено, разрешен широкий диапазон в зоне с высоким крутящим моментом в качестве диапазона, в котором можно установить крутящий момент команды 4WD.
[0086] Схема в (b) состоит в том, чтобы достичь крутящего момента команды 4WD, с помощью которого можно надежно достичь действия управления сцеплением в сценарии, в котором транспортное средство снова начинает движение на фиг. 14. В частности, для надежного достижения действия управления сцеплением в сценарии, в котором транспортное средство снова начинает движение на фиг. 14, например, необходимо, чтобы сцепление 10 с электронным управлением поддерживало состояние кручения кулачка, даже когда транспортное средство начинает скользить при остановке на склоне. Однако максимальный крутящий момент, передаваемый в систему привода при остановленном транспортном средстве, является крутящим моментом проскальзывания. Соответственно, равномерное распределение крутящего момента проскальзывания, когда транспортное средство остановлено, на все четыре колеса из числа передних и задних колес обеспечивает оптимальный режим распределения крутящего момента, при котором обеспечивается сцепление поверхности дороги и шин на четырех колесах и которое препятствует скольжению транспортного средства относительно, среди прочего, сопротивления градиенту дорожного покрытия. Поэтому диапазон, в котором устанавливается крутящий момент команды 4WD, представляет собой диапазон, полученный путем: установки в качестве целевого значения крутящего момента величины крутящего момента, при котором крутящий момент проскальзывания, когда транспортное средство остановлено, распределяется в соотношении 50%:50%; и придания целевому значению крутящего момента ширины разрешения крутящего момента согласно, в частности, ошибке в оценке крутящего момента проскальзывания, когда транспортное средство остановлено.
[0087] Схема в (с) состоит в том, чтобы достичь крутящего момента команды 4WD, с которым возможно достичь действия управления сцеплением в сценарии, в котором транспортное средство снова начинает движение на фиг. 14, а также избежать блокировки тормоза четырех колес при начале движения снова транспортного средства. В частности, когда высокий крутящий момент команды 4WD для поддержания жесткого состояния 4WD установлен относительно крутящего момента привода, когда транспортное средство снова начинает движение, система привода на четыре колеса принимает состояние полного прямого соединения, так что тормозной момент, а также крутящий момент привода распределяется на четыре колеса. Поэтому, если одна из четырех шин подвергается блокировке тормоза, в частности, из-за неровности поверхности дороги, когда транспортное средство снова начинает движение, тормозной момент, приложенный к шине, распределяется на четыре колеса, что отрицательно сказывается на блокировке тормоза четырех колес. Поэтому нижнее предельное значение крутящего момента команды 4WD устанавливается равным крутящему моменту, необходимому для распределения 50% крутящего момента проскальзывания, когда транспортное средство остановлено, таким же образом, как в схеме в (b), и верхнее предельное значение крутящего момента команды 4WD устанавливается как крутящий момент, при котором можно избежать блокировки тормоза четырех колес. Поэтому заданный диапазон в соответствии с нижним предельным значением и верхним предельным обеспечен для крутящего момента команды 4WD.
[0088] [Действие управления сцеплением в сценарии, в котором переключается положение включения передачи и транспортное средство остановлено]
Фиг.15 - временная диаграмма, показывающая различные характеристики во время, когда операция переключения положения включения передачи с D на N, а затем на R выполняется во время перехода из состояния движения в состояние остановки в первом варианте осуществления. Действие управления сцеплением в сценарии, в котором переключают положение включения передачи и транспортное средство остановлено в первом варианте осуществления, описано ниже со ссылкой на фиг. 15.
[0089] Например, в сценарии, в котором положение включения передачи переключается с D на N, а затем на R, и транспортное средство остановлено, карданный вал 9 переводится в состояние кручения в переднюю сторону, в то время как транспортное средство остановлено. В этом случае состояние кручения кулачкового механизма сцепления 10 с электронным управлением изменяется от состояния кручения в переднюю сторону на состояние кручения в заднюю сторону, когда транспортное средство снова начинает движение задним ходом. В это время, когда шарики 34, предусмотренные в кулачковом механизме сцепления 10 с электронным управлением, выходят из зацепления из состояния плотного зажатия между парой противоположных кулачковых поверхностей канавок 36, 36 кулачка посредством кручения в переднюю сторону, шарики 34 принудительно приводятся в движение обратным кручением и сталкиваются с парой противоположных кулачковых поверхностей посредством кручения в заднюю сторону. Поэтому шум столкновения возникает, когда шарики 34 сталкиваются с поверхностями кулачка задней стороны. Этот шум столкновения является ненормальным для водителя и/или пассажира.
[0090] Однако в первом варианте осуществления в сценарии, в котором положение включения передачи переключается с D на N, а затем на R, и транспортное средство остановлено, конфигурация выполнена так, чтобы состояние кручения в переднюю сторону карданного вала 9 при остановленном транспортном средстве возвращается в расцепленное состояние. В частности, выполняется операция для переключения из положения D в положение N в момент времени t1 и для переключения из положения N в положение R в момент времени t3. В это время сигнал положения включения передачи от переключателя 26 блокировки стартера переключается с сигнала положения D на сигнал положения N в момент времени t2 и переключается с сигнала положения N на сигнал положения R в момент времени t4.
[0091] Соответственно, переключение сигнала с сигнала положения N на сигнал положения R служит в качестве триггера, и крутящий момент команды 4WD с момента времени t4 начинает уменьшаться до нулевого крутящего момента (0Нм) при резком градиенте. Транспортное средство останавливается в момент времени t5, крутящий момент команды 4WD достигает нулевого крутящего момента в момент времени t6 сразу после остановки транспортного средства, и сцепление 10 с электронным управлением переходит из состояния зацепления в состояние расцепления из-за крутящего момента команды 4WD. Как следствие, когда транспортное средство остановлено в момент времени t6 и далее, транспортное средство остается готовым к операции, чтобы снова начать движение задним ходом в состоянии, в котором кручение карданного вала 9 отключено.
[0092] Когда происходит переключение при нажатии от операции выключения тормоза к операции включения акселератора с намерением снова начать движение задним ходом, кулачковый механизм сцепления 10 с электронным управлением переходит из свободного состояния кулачка в состояние зацепления кулачка в заднюю сторону из-за состояния, в котором кручение коленчатого вала 9 отключено. Скорость транспортного средства увеличивается в момент времени t7, и транспортное средство начинает движение задним ходом. Поскольку кручение карданного вала 9 сконфигурировано так, чтобы его можно было отключить заранее, когда транспортное средство остановлено, аномальный шум, создаваемый кулачковым механизмом сцепления 10 с электронным управлением, предотвращается во время начала движения задним ходом.
[0093] [Действие управления сцеплением в сценарии, в котором зажигание выключено и транспортное средство остановлено]
Фиг.16 - временная диаграмма, показывающая различные характеристики во время, когда операция выключения зажигания выполняется в состоянии, в котором начальный крутящий момент применяется в первом варианте осуществления. Действие управления сцеплением в сценарии, в котором зажигание выключено и транспортное средство остановлено в первом варианте осуществления, описано ниже со ссылкой на фиг. 16.
[0094] Например, когда операция выключения зажигания выполняется в состоянии, в котором начальный крутящий момент прикладывается к сцеплению с электронным управлением, начальный крутящий момент, который прикладывается, резко удаляется в ответ на операцию выключения. В этом случае резкое снятие начального крутящего момента, который прикладывается, приводит к внезапному изменению крутящего момента, передаваемого на левое и правое задние колеса, что приводит к колебанию продольной нагрузки G транспортного средства и возникновению удара при выходе из зацепления сцепления. В частности, в случае, когда торможение для приложения высокого начального крутящего момента, когда транспортное средство остановлено, выполняется таким же образом, как и в первом варианте осуществления, проблема заключается в том, что возникающий удар при выходе из зацепления сцепления увеличивается, и возникает дискомфорта для водителя и/или пассажира.
[0095] Однако в первом варианте осуществления принята конфигурация, в которой прилагаемый начальный крутящий момент плавно удаляется, когда операция выключения включателя 25 зажигания выполняется в состоянии, в котором начальный крутящий момент прикладывается к сцеплению 10 с электронным управлением. В частности, когда выполняется операция по переключению включателя 25 зажигания из положения включено в положение выключено в момент времени t1, когда выводится крутящий момент команды 4WD и транспортное средство останавливается, переключение сигнала включателя зажигания служит в качестве триггера, и крутящий момент команды 4WD со времени t1 начинает уменьшаться до нулевого крутящего момента (0Нм) при плавном градиенте. Крутящий момент команды 4WD достигает нулевого крутящего момента в момент времени t2. Поэтому во время операции выключения включателя 25 зажигания плавное снятие прикладываемого начального крутящего момента подавляет любое изменение крутящего момента, передаваемого на левое и правое задние колеса 14, 15, и предотвращает удар при выходе из зацепления сцепления. Состояние, в котором выполняется операция выключения включателя 25 зажигания и транспортное средство остановлено, создает обстановку, в которой водитель и/или пассажир более чувствительны к удару, чем при движении транспортного средства. Соответственно, предотвращение удара при выходе из зацепления сцепления, когда чувствительность к удару выше, таким образом, приводит к не ощущению дискомфорта у водителя и/или пассажира.
[0096] Эффекты изобретения описаны ниже. В устройстве управления сцеплением для транспортного средства с приводом на четыре колеса от двигателя по первому варианту осуществления возможно получить эффекты, перечисленные ниже.
[0097] (1) Либо левое и правое передние колеса 6, 7, либо левое и правое задние колеса 14, 15 сконфигурированы как основные ведущие колеса, соединенные с источником привода (двигатель 1), а другие из левого и правого передних колес 6, 7 или левого и правого задних колеса 14, 15 сконфигурированы как дополнительные ведущие колеса, соединенные через фрикционную муфту сцепления (сцепление 10 с электронным управлением) с источником привода (двигатель 1). Когда транспортное средство начинает движение из-за операции нажатия педали акселератора, фрикционная муфта сцепления (сцепление 10 с электронным управлением) приводится в зацепление, в результате чего крутящий момент привода от источника привода (двигатель 1) распределяется на основные ведущие колеса и дополнительные ведущие колеса. В способе управления сцеплением для транспортного средства с приводом на четыре колеса (транспортное средство с приводом на четыре колеса от двигателя), когда транспортное средство переходит из состояния движения в состояние остановки, оставаясь в положении включения передачи «движение» (положение D, положение R), управление выполняется для применения начального крутящего момента Tr1, Tr2 в качестве управления крутящим моментом зацепления фрикционной муфты сцепления (сцепление 10 с электронным управлением) во время выполнения транспортным средством. Величина начального крутящего момента Tr1, Tr2 устанавливается на величину, которая необходима для поддержания состояния кручения системы привода посредством крутящего момента, передаваемого в систему привода дополнительных ведущих колес, до остановки транспортного средства (фиг. 11). Поэтому возможно обеспечить способ управления сцеплением транспортного средства с приводом на четыре колеса от двигателя (транспортного средства с приводом на четыре колеса), в котором, когда транспортное средство снова начинает движение из состояния остановки, обеспечен отклик передачи крутящего момента на дополнительные ведущие колеса (левое и правое задние колеса 14, 15) относительно операции нажатия педали акселератора.
[0098] (2) В случаях, когда крутящий момент проскальзывания распределяется на основные ведущие колеса и дополнительные ведущие колеса, когда транспортное средство остановлено, величина начального крутящего момента Tr1, Tr2 устанавливается на величину крутящего момента, которая необходима для установки отношение распределения крутящего момента на основные ведущие колеса и распределения крутящего момента на дополнительные ведущие колеса на 50%:50% (фиг. 14). Поэтому в дополнение к эффекту в (1) возможно поддерживать состояние кручения системы привода посредством крутящего момента, передаваемого в систему привода дополнительных ведущих колес, до остановки транспортного средства, обеспечивая силу сцепления поверхности дороги с шинами на четырех колесах, когда транспортное средство останавливается.
[0099] (3) Фрикционная муфта сцепления представляет собой сцепление 10 шариково-кулачкового типа с электронным управлением. Когда операция переключения положения включения передачи выполняется между положением включения передачи «движение вперед» (положение D) и положением включения передачи «движение назад» (положение R), когда транспортное средство остановлено, начальный крутящий момент Tr1, Tr2, который был применен до операции переключения положения включения передачи, снижается до или ниже заданного значения (до нулевого крутящего момента) (фиг. 15). Поэтому в дополнение к эффектам в (1) и (2), когда транспортное средство снова начинает движение после операции переключения положения включения передачи, возможно предотвратить ненормальный шум, создаваемый кулачковым механизмом сцепления 10 с электронным управлением, посредством отключения кручения коленчатого вала 9 заранее, когда транспортное средство остановлено.
[0100] (4) Когда операция выключения включателя 25 зажигания выполняется, когда транспортное средство остановлено, начальный крутящий момент Tr1, Tr2, применяемый до операции выключения, постепенно уменьшается до нулевого крутящего момента (фиг. 16). Поэтому в дополнение к эффектам в (1) - (3), когда включатель 25 зажигания выключен, когда транспортное средство остановлено, возможно предотвратить удар при выходе из зацепления сцепления в фрикционной муфте (сцепление 10 с электронным управлением).
[0101] (5) Либо левое и правое передние колеса 6, 7, либо левое и правое задние колеса 14, 15 сконфигурированы как основные ведущие колеса, соединенные с источником привода (двигатель 1), а другие из левого и правого передних колес 6, 7 или левого и правого задних колес 14, 15 сконфигурированы как дополнительные ведущие колеса, соединенные через фрикционную муфту сцепления (сцепление 10 с электронным управлением) с источником привода (двигатель 1). Транспортное средство снабжено контроллером 16 4WD, который при начале движения транспортного средства из-за операции нажатия педали акселератора вызывает вхождение в зацепление фрикционной муфты сцепления (сцепление 10 с электронным управлением), в результате чего крутящий момент привода от источника привода (двигатель 1) передается к основным ведущим колесам и дополнительным ведущим колесам. В этом устройстве для управления сцеплением транспортного средства с приводом на четыре колеса (транспортного средства с приводом на четыре колеса от двигателя) контроллер 16 4WD имеет блок 16a обработки начального крутящего момента, который при переключении транспортного средства из состояния движения в состояние остановки, оставаясь в положении включения передачи «движение» (положение D, положение R), выполняет управление, чтобы применить начальный крутящий момент Tr1, Tr2, когда транспортное средство остановлено, в качестве управления крутящим моментом зацепления фрикционной муфты сцепления (сцепление 10 с электронным управлением). Блок 16a обработки начального крутящего момента устанавливает величину начального крутящего момента Tr1, Tr2 равной величине, которая необходима для поддержания состояния кручения системы привода посредством крутящего момента, передаваемого в систему привода дополнительных ведущих колес до остановки транспортного средства (фиг. 4). Поэтому возможно обеспечить устройство для управления сцеплением транспортного средства с приводом на четыре колеса от двигателя (транспортное средство с приводом на четыре колеса), в котором, когда транспортное средство снова начинает движение из состояния остановки, обеспечивается отклик передачи крутящего момента на дополнительные ведущие колеса (левое и правое задние колеса 14, 15) относительно операции нажатия педали акселератора.
[0102] Способ и устройство для управления сцеплением транспортного средства с приводом на четыре колеса согласно настоящему раскрытию были описаны выше на основе первого варианта осуществления. Однако с точки зрения конкретной конфигурации упомянутые способ и устройство не ограничены первым вариантом осуществления, допускаются различные конструктивные изменения, дополнения и т. д. при условии, что эти модификации не выходят за рамки сущности изобретения, как в формуле изобретения.
[0103] В первом варианте осуществления был представлен пример управления начальным крутящим моментом, в котором: крутящий момент проскальзывания, когда транспортное средство остановлено в положении D, определяется заранее, и начальный крутящий момент Tr1, когда транспортное средство остановлено в положении D применяется в соответствии с первой картой Mp1 начального крутящего момента; и крутящий момент проскальзывания, когда транспортное средство остановлено в положении R, также определяется заранее, и начальный крутящий момент Tr2, когда транспортное средство остановлено в положении R, применяется в соответствии со второй картой Mp2 начального крутящего момента. Однако управление начальным крутящим моментом не ограничивается таковым в первом варианте осуществления, настоящее изобретение также допускает пример, в котором начальный крутящий момент Tr1, когда транспортное средство остановлено в положении D, и/или начальный крутящий момент Tr2, когда транспортное средство остановлено в положении R, вместо этого применяется в соответствии с вычислением при каждом его применении. При применении в соответствии с этим вычислением начальный крутящий момент вычисляется в соответствии с частотой вращения двигателя и характеристиками преобразователя крутящего момента в случае транспортного средства с приводом на четыре колеса от двигателя. В качестве альтернативы, в случае транспортного средства с приводом на четыре колеса от электромотора, в котором в качестве источника привода используется электромотор/генератор, транспортное средство с приводом на четыре колеса от электромотора таково, что крутящий момент проскальзывания, когда транспортное средство остановлено, применяется в соответствии с управлением крутящим моментом проскальзывания электромотора/генератора, значение крутящего момента проскальзывания в управлении крутящим моментом проскальзывания используется в вычислениях.
[0104] В первом варианте осуществления был представлен пример, в котором, когда операция переключения положения включения передачи выполняется между положением D и положением R, когда транспортное средство остановлено, начальный крутящий момент Tr1, Tr2, который был применен до операции переключения положения включения передачи снижается до нулевого крутящего момента. Однако настоящее изобретение также допускает пример, в котором, когда выполняется операция переключения положения включения передачи, начальный крутящий момент, который был применен до операции переключения положения включения передачи, уменьшается до или ниже заданного значения в диапазоне, в котором фрикционная муфта сцепления (сцепление 10 с электронным управлением) может быть выведена из зацепления.
[0105] В первом варианте осуществления был представлен пример, в котором в качестве фрикционной муфты сцепления используется сцепление шариково-кулачкового типа с электронным управлением. Однако фрикционная муфта сцепления не ограничена таковой в первом варианте осуществления, настоящее изобретение также допускает пример, в котором используется другой тип фрикционной муфты сцепления, такой как гидравлическая многодисковая муфта и т.д.
[0106] В первом варианте осуществления был представлен пример, в котором способ управления сцеплением и устройство управления сцеплением настоящего раскрытия применяются к транспортному средству с приводом на четыре колеса от двигателя, имеющему переднеприводную основу, причем двигатель установлен в качестве источника привода в транспортном средстве с приводом на четыре колеса от двигателя. Однако способ управления сцеплением и устройство управления сцеплением по настоящему изобретению также могут применяться к гибридному транспортному средству с приводом на четыре колеса, в котором двигатель и электромотор/генератор установлены в качестве источников привода, или к транспортному средству с приводом на четыре колеса от электромотора, в котором электромотор/генератор установлен в качестве источника привода. Кроме того, транспортное средство с приводом на четыре колеса не ограничивается наличием переднеприводной основы; настоящее раскрытие также может быть применено к транспортному средству с приводом на четыре колеса, имеющему заднеприводную основу.
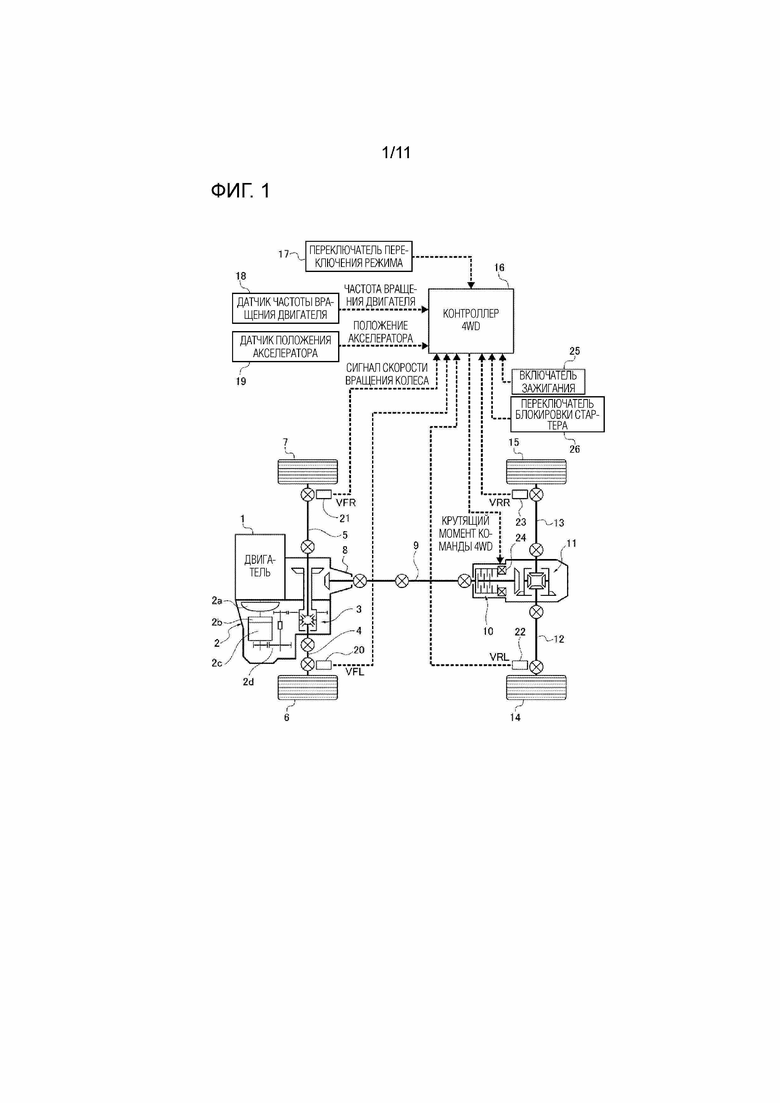
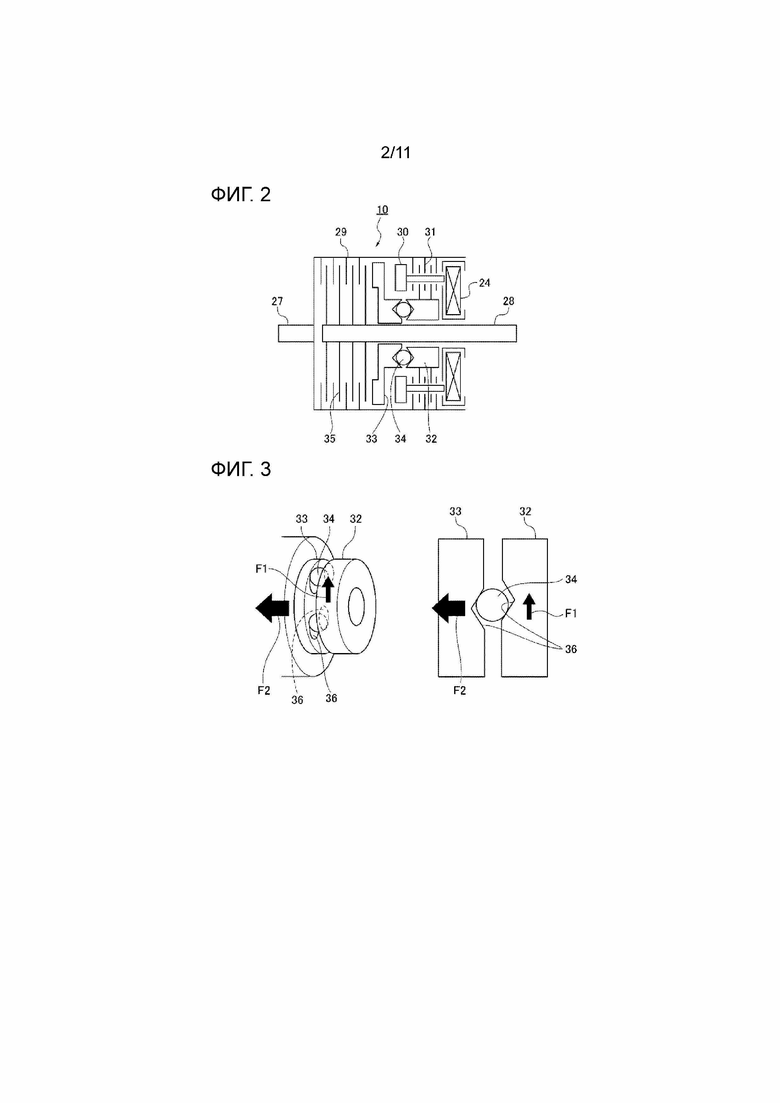
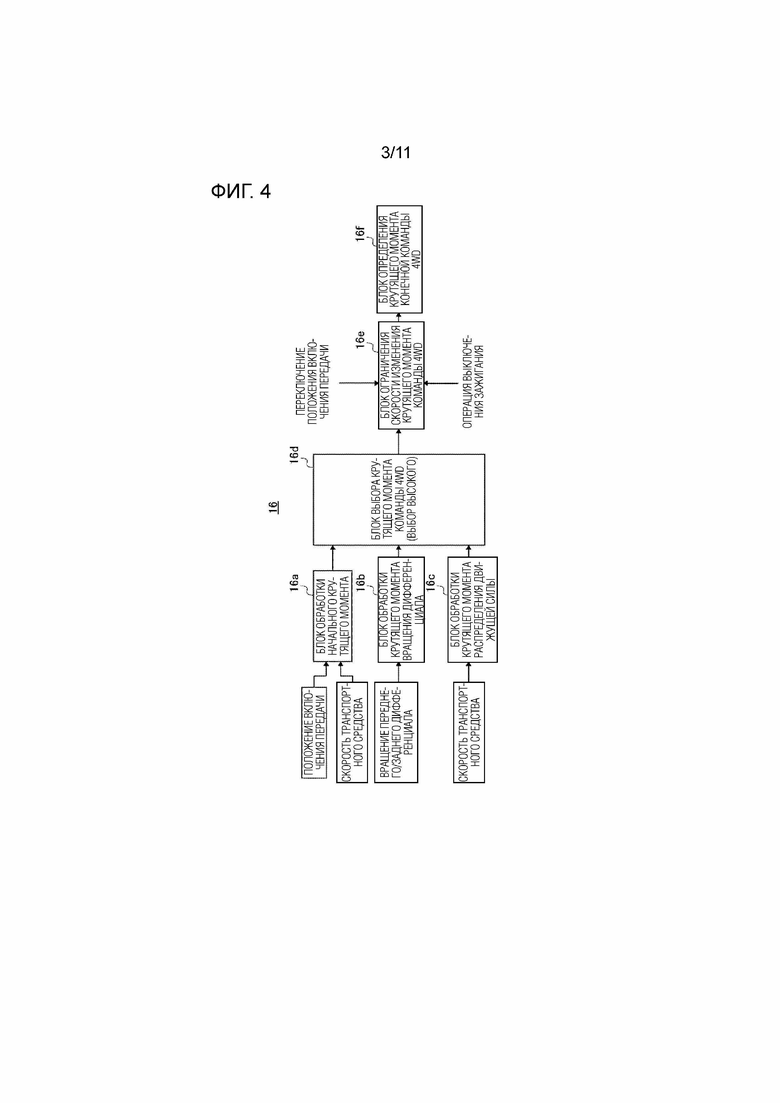
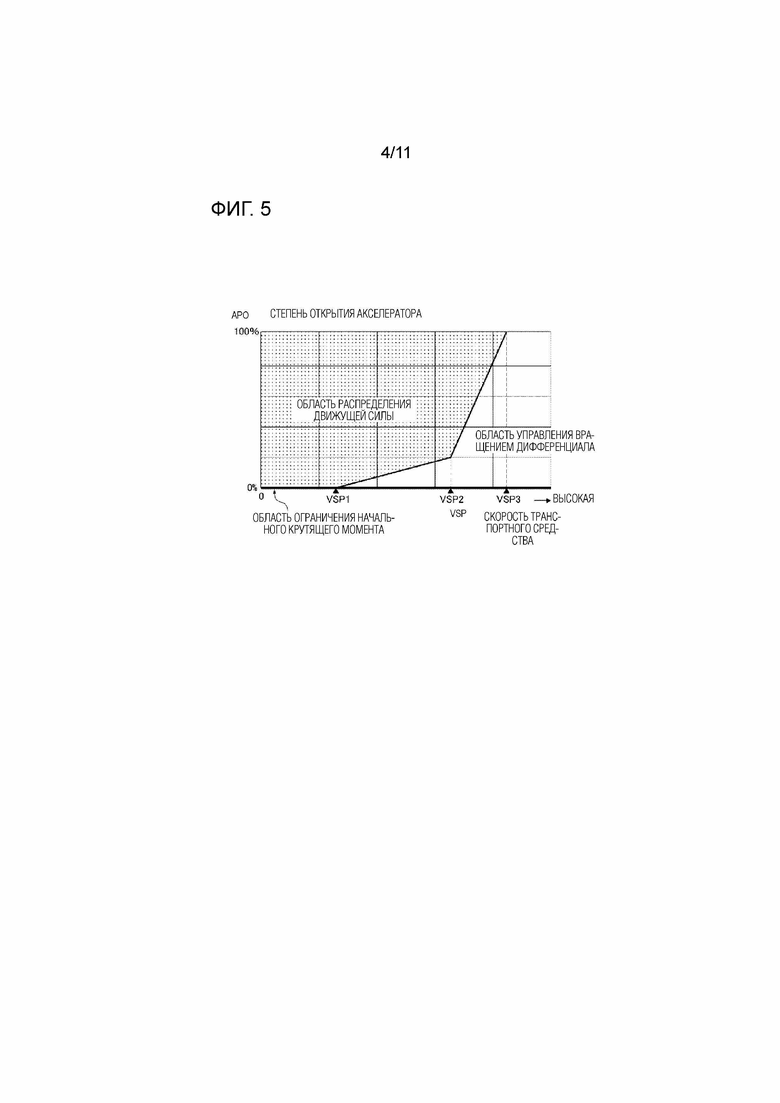
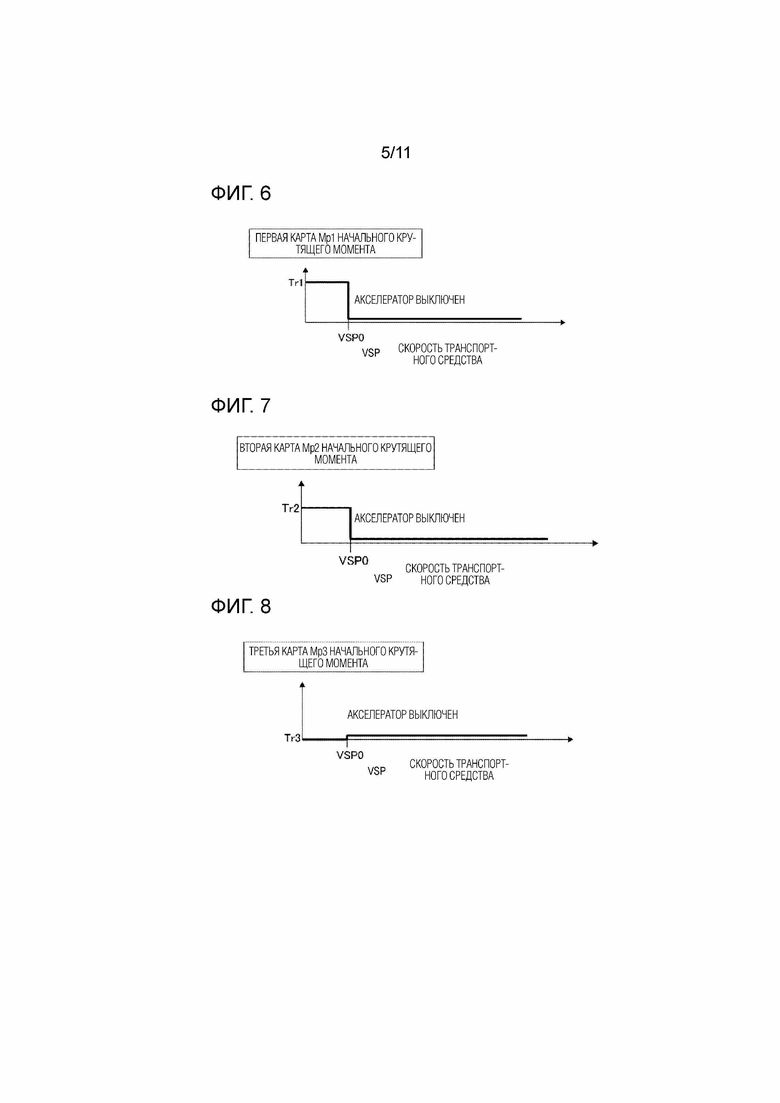
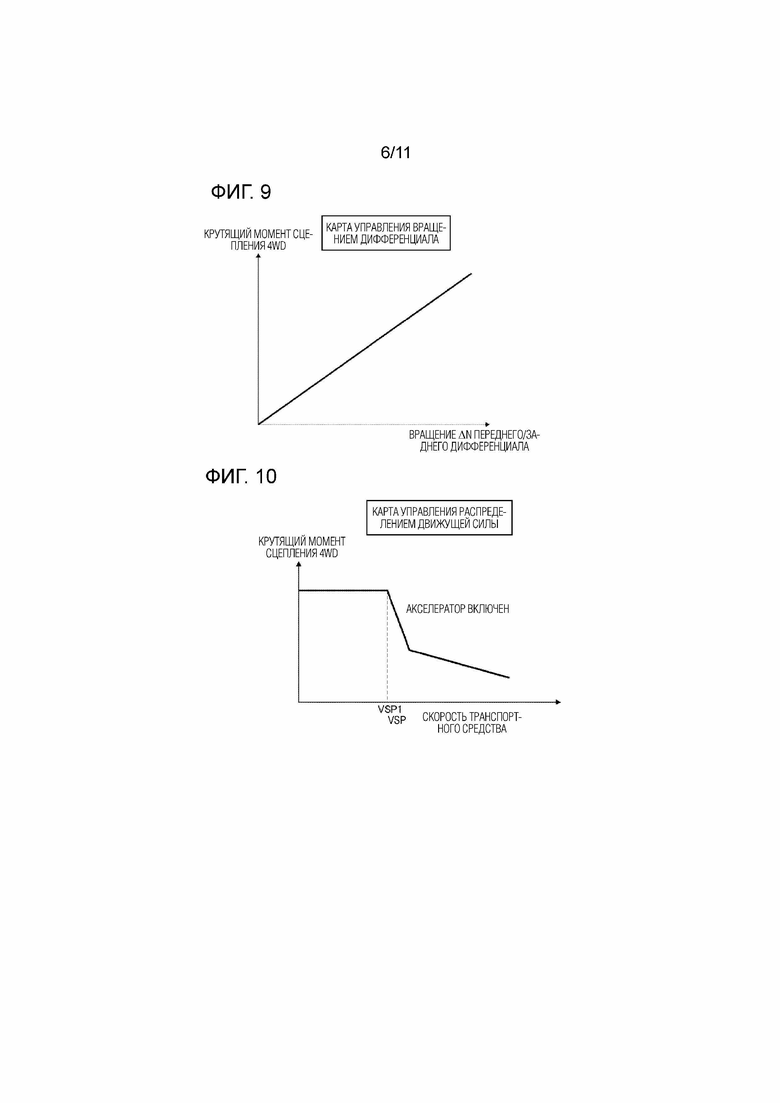
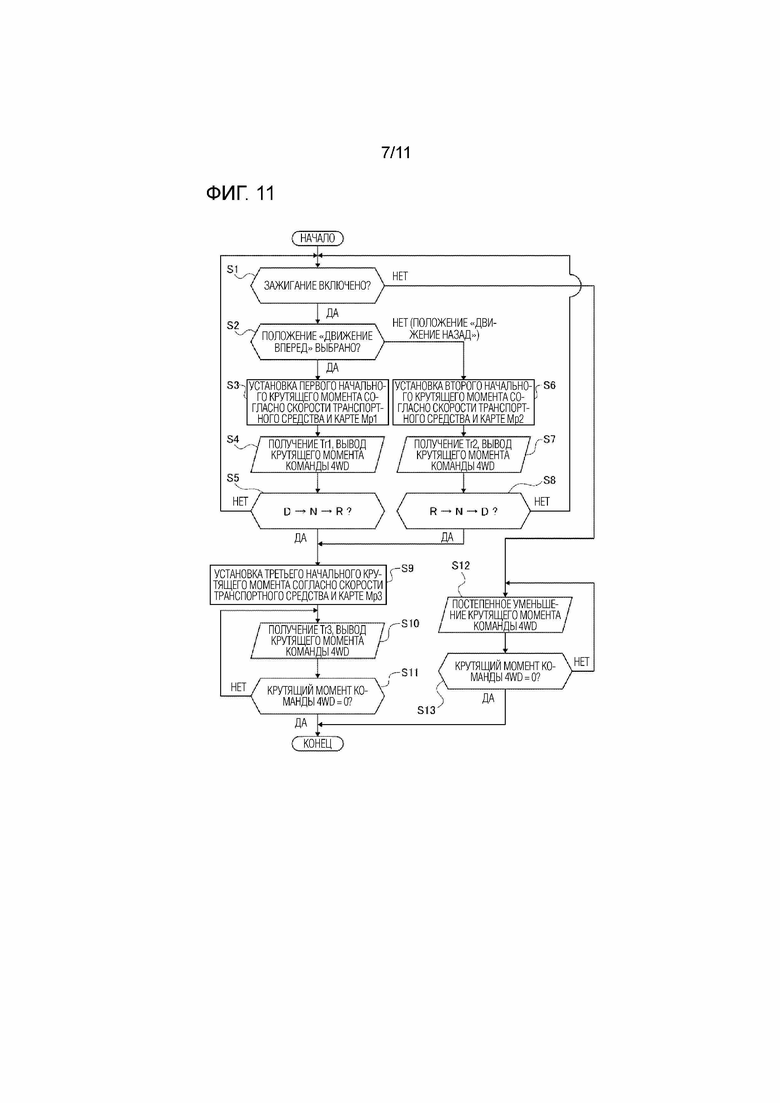
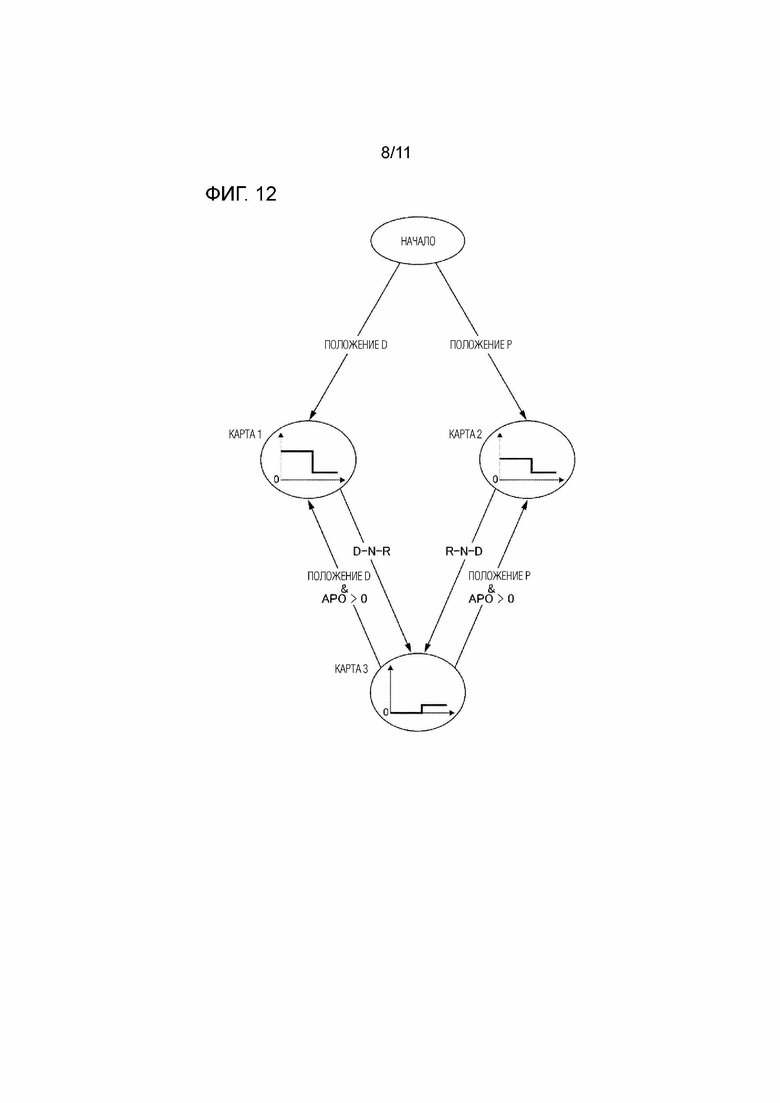
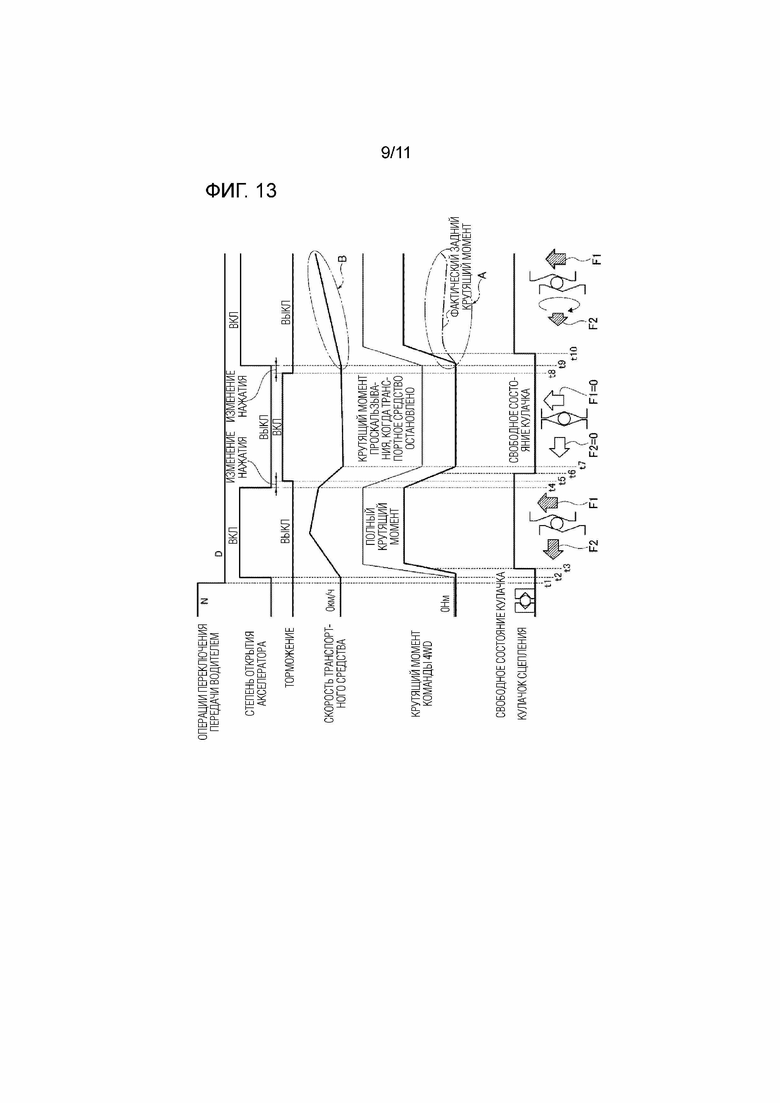
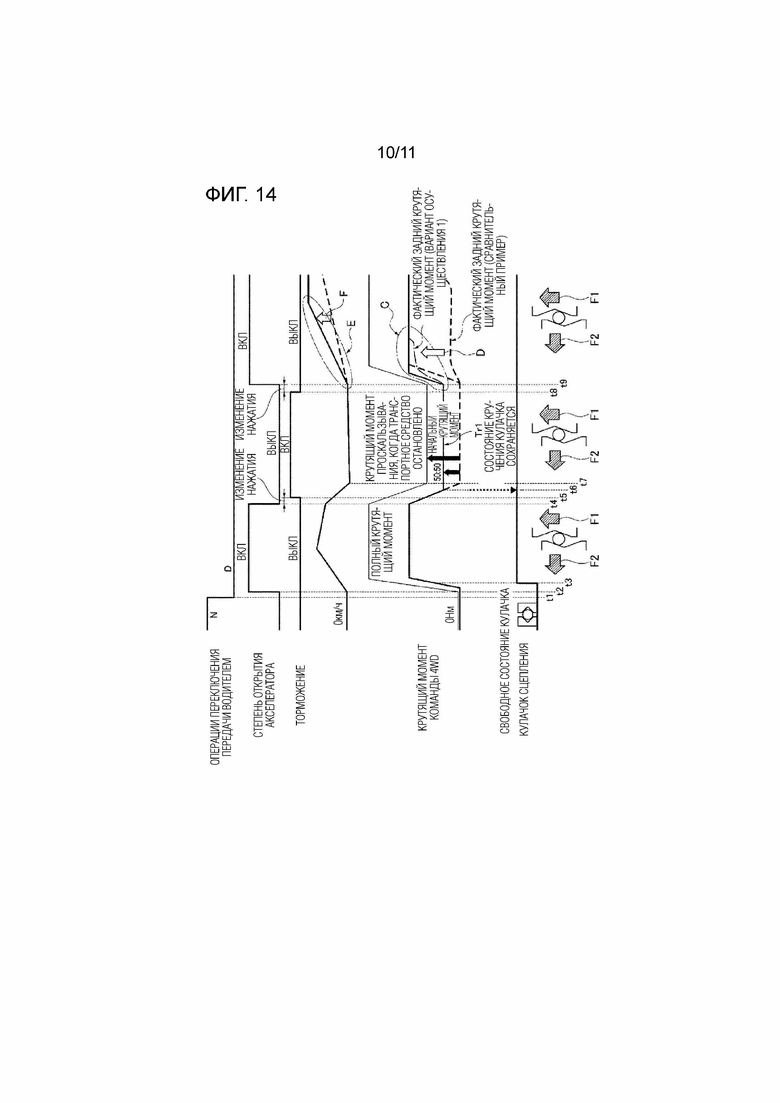
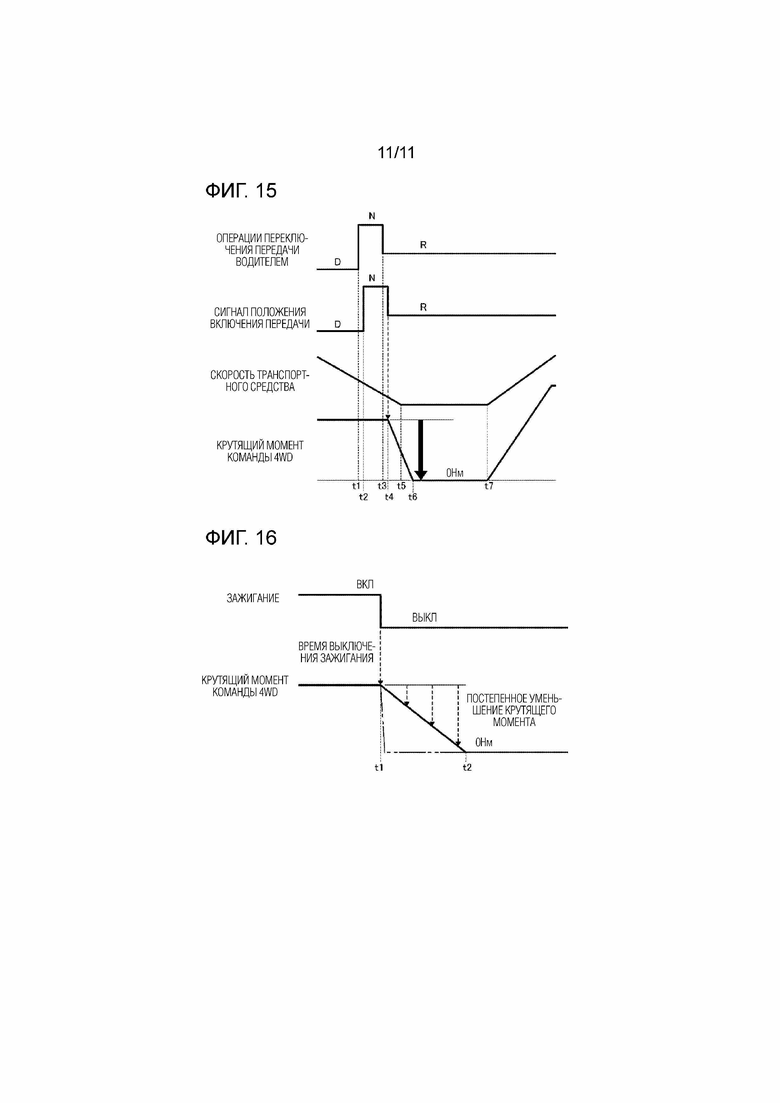
Изобретение относится к устройству и способу управления сцеплением транспортного средства. Устройство обеспечивает отклик передачи крутящего момента на дополнительные ведущие колеса относительно операции нажатия педали акселератора, когда транспортное средство снова начинает движение из состояния остановки. Либо левое и правое передние колеса (6, 7), либо левое и правое задние колеса (14, 15) сконфигурированы как основные ведущие колеса, а другие колеса сконфигурированы как дополнительные ведущие колеса, соединенные через сцепление (10) с электронным управлением. Когда транспортное средство начинает движение при нажатии педали акселератора, сцепление (10) с электронным управлением приводится в зацепление. В способе управления сцеплением, когда транспортное средство переходит из состояния движения в состояние остановки, оставаясь в положении включения передачи «движение», выполняется управление для приложения начального крутящего момента Tr1, Tr2 в качестве управления крутящим моментом зацепления сцепления (10) с электронным управлением, когда транспортное средство остановлено. Величина начального крутящего момента Tr1, Tr2 устанавливается равной величине, которая необходима для поддержания состояния кручения системы привода посредством крутящего момента, передаваемого в систему привода дополнительных ведущих колес до остановки транспортного средства. Достигается повышение надежности и долговечности устройства. 2 н. и 3 з.п. ф-лы, 16 ил.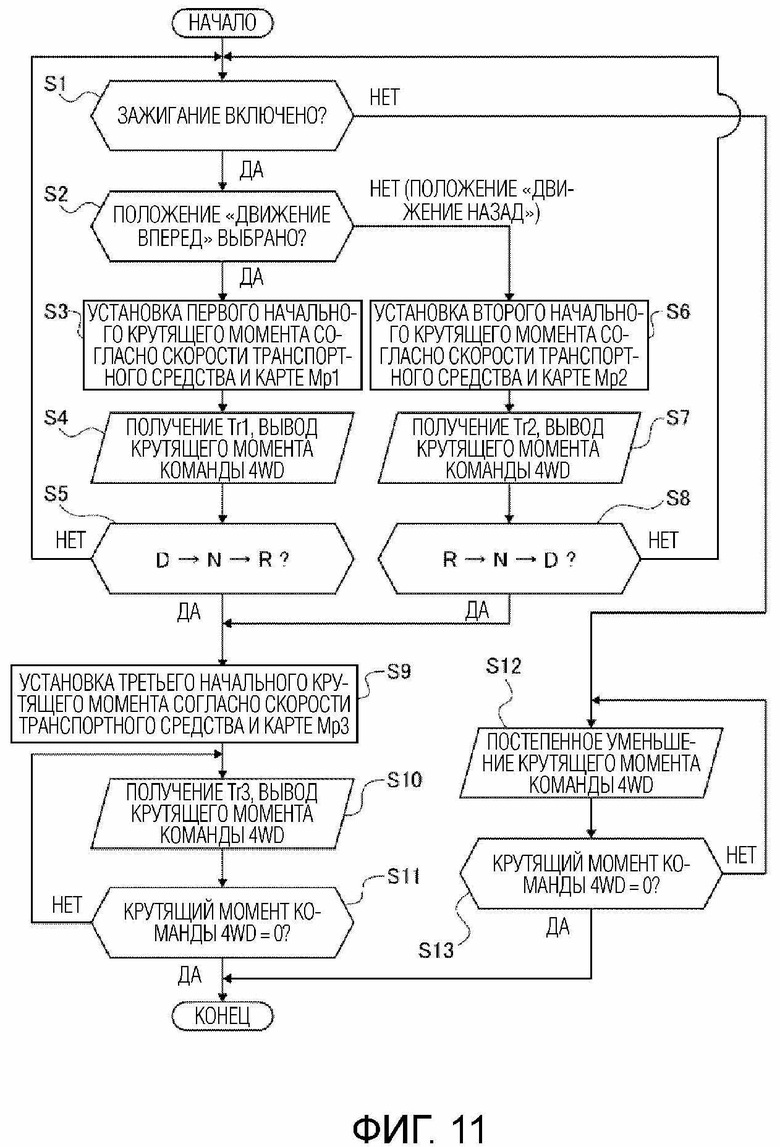
1. Способ управления сцеплением транспортного средства с приводом на четыре колеса для транспортного средства с приводом на четыре колеса, в котором
либо левое и правое передние колеса, либо левое и правое задние колеса сконфигурированы как основные ведущие колеса, соединенные с источником привода, а другие из левого и правого передних колес и левого и правого задних колес сконфигурированы как дополнительные ведущие колеса, соединенные через фрикционную муфту сцепления с источником привода, и
когда транспортное средство начинает движение из–за операции нажатия педали акселератора, фрикционная муфта сцепления приводится в зацепление, в результате чего крутящий момент привода от источника привода распределяется на основные ведущие колеса и дополнительные ведущие колеса,
при этом способ управления сцеплением транспортного средства с приводом на четыре колеса характеризуется тем, что:
когда транспортное средство переходит из состояния движения в состояние остановки при сохранении положения включения передачи «движение», выполняют управление для приложения начального крутящего момента в качестве управления крутящим моментом зацепления фрикционной муфты сцепления, когда транспортное средство остановлено; и
устанавливают величину начального крутящего момента равной величине, которая необходима для поддержания состояния кручения системы привода посредством передачи крутящего момента в систему привода дополнительных ведущих колес до остановки транспортного средства.
2. Способ управления сцеплением транспортного средства с приводом на четыре колеса по п.1, в котором
в случаях, когда крутящий момент проскальзывания распределяется между основными ведущими колесами и дополнительными ведущими колесами, когда транспортное средство остановлено, устанавливают величину начального крутящего момента равной величине крутящего момента, которая необходима для установки отношения распределения крутящего момента на основные ведущие колеса и распределения крутящего момента на дополнительные ведущие колеса на 50%:50%.
3. Способ управления сцеплением транспортного средства с приводом на четыре колеса по п.1 или 2, отличающийся тем, что
фрикционная муфта сцепления является сцеплением шариково-кулачкового типа с электронным управлением; и
когда операция переключения положения включения передачи выполняется между положением включения передачи «движение вперед» и положением включения передачи «движение назад», когда транспортное средство остановлено, уменьшают начальный крутящий момент, который был приложен до операции переключения положения включения передачи, до или ниже заданного значения.
4. Способ управления сцеплением транспортного средства с приводом на четыре колеса по любому из пп.1–3, отличающийся тем, что
когда выполняется операция выключения включателя зажигания, когда транспортное средство остановлено, постепенно уменьшают начальный крутящий момент, который был приложен до упомянутой операции выключения, до нулевого крутящего момента.
5. Устройство управления сцеплением транспортного средства с приводом на четыре колеса для транспортного средства с приводом на четыре колеса, в котором
либо левое и правое передние колеса, либо левое и правое задние колеса сконфигурированы как основные ведущие колеса, соединенные с источником привода, а другие из левого и правого передних колес или левого и правого задних колес сконфигурированы как дополнительные ведущие колеса, соединенные через фрикционную муфту сцепления с источником привода, и
транспортное средство снабжено контроллером привода на четыре колеса (4WD), который, когда транспортное средство начинает движение из–за операции нажатия педали акселератора, вызывает вхождение в зацепление фрикционной муфты сцепления, в результате чего крутящий момент привода от источника привода распределяется на основные ведущие колеса и дополнительные ведущие колеса,
при этом устройство управления сцеплением транспортного средства с приводом на четыре колеса характеризуется тем, что:
контроллер 4WD имеет блок обработки начального крутящего момента, который, когда транспортное средство переходит из состояния движения в состояние остановки, оставаясь в положении включения передачи «движение», выполняет управление, чтобы прикладывать начальный крутящий момент в качестве управления крутящим моментом зацепления фрикционной муфты сцепления, когда транспортное средство остановлено; и
блок обработки начального крутящего момента устанавливает величину начального крутящего момента равной величине, которая необходима для поддержания состояния кручения системы привода посредством крутящего момента, передаваемого в систему привода дополнительных ведущих колес, до остановки транспортного средства.
| СПОСОБ УПРАВЛЕНИЯ МЕХАНИЧЕСКИМ СРЕДСТВОМ СОЕДИНЕНИЯ ПЕРВОЙ И ВТОРОЙ ОСЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2577414C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО, ИМЕЮЩЕЕ ПЕРЕКЛЮЧАЕМЫЙ ПРИВОД НА ЧЕТЫРЕ КОЛЕСА | 2009 |
|
RU2526316C2 |
| ТРАНСМИССИЯ ДВУХОСНОГО ПОЛНОПРИВОДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2123945C1 |
| 1971 |
|
SU411812A1 | |
| US 20020033293 A1, 21.03.2002. | |||

